Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Programa de Pós-Graduação em Engenharia Elétrica
Simulador Computacional para Poços de Petróleo com
Método de Elevação Artificial por Bombeio Mecânico
João Maria Araújo do Nascimento
Orientador: Prof. D. Sc. Pablo Javier Alsina
Co-orientador: Prof. D. Sc. André Laurindo Maitelli
Dissertação de Mestrado apresentada ao Pro-grama de Pós-Graduação em Engenharia Elétrica da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obten-ção do título de Mestre em Ciências.
Divisão de Serviços Técnicos
Catalogação da publicação na fonte. UFRN / Biblioteca Central Zila Mamede
Nascimento, João Maria Araújo do.
Simulador Computacional para Poços de Petróleo com Método de Eleva-ção Artificial por Bombeio Mecânico / João Maria Araújo do Nascimento. - Natal, 2005.
114 p.
Orientador: Pablo Javier Alsina
Co-Orientador: André Laurindo Maitelli
Dissertação (Mestrado) - Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica.
1. Simulador - Dissertação. 2. Petróleo - Dissertação. 3. Bombeio mecâni-co - Dissertação. 4. Simulação mecâni-computacional - Dissertação. 5. Elevação arti-ficial - Dissertação. I. Alsina, Pablo Javier. II. Maitelli, André Laurindo. III. Título.
4
Agradecimentos
Ao meu maravilhoso Deus, pelo privilégio de concluir este trabalho mesmo com lutas e dificuldades. A Ele toda glória e louvor.
Ao meu orientador Prof. Dr. Pablo Javier Alsina, pelas muitas sugestões e colaboração neste trabalho.
Ao meu co-orientador e amigo Prof. Dr. André Laurindo Maitelli pela confiança, a-poio e entusiasmo.
Ao Eng. Rutácio de Oliveira Costa, em especial, por suas inestimáveis contribuições e pelos muitos momentos de incentivo.
Aos engenheiros e colegas, grandes profissionais, da ST-ELV da UN-RNCE da Petro-bras que contribuíram com informações e feedbacks.
Aos professores Adelardo Medeiros, Andrés Ortiz, Fábio Meneghetti e Affonso. Aos colegas da Base de Pesquisa BPCAS.
Aos colegas do Projeto Automação de Poços, pela força e estímulo. À Petrobras, pela confiança e apoio financeiro.
A minha família, pela atenção, amor e compreensão em todos os momentos.
6
Resumo
Este trabalho propõe um simulador computacional para poços de petróleo com trajetó-ria vertical, equipados com elevação artificial por bombeio mecânico (BM). O simulador é capaz de representar o comportamento dinâmico de sistemas de BM e avaliar numericamente diversos parâmetros relevantes ao mesmo, permitindo a fácil visualização de diversos fenô-menos pertinentes ao processo, tudo isso, de forma conveniente e a custos e tempos menores, do que experimentos com poços reais.
A simulação utiliza um modelo baseado no comportamento dinâmico da coluna de hastes, o qual pode ser representado por uma equação diferencial parcial de segunda ordem. A partir deste modelo, pode-se verificar a ocorrência de diversas situações comumente vivenci-adas em campo. A simulação conta ainda com animações em 3D, facilitando o entendimento físico do processo, devido a uma melhor interpretação visual dos fenômenos. Outra caracterís-tica importante é a emulação dos principais sensores utilizados na automação de BM. A emu-lação dos sensores é feita através de uma interface microcontrolada entre o simulador e con-troladores industriais, de maneira que os concon-troladores interpretem o simulador como um po-ço real.
No simulador foi desenvolvido um “ módulo de falhas” onde são implementadas seis diferentes condições de falhas. Estas pertencem ao grupo dos principais problemas encontra-dos em sistemas de BM. Assim, a análise e verificação destes problemas, através do simula-dor, dá ao usuário a oportunidade de identificar tais situações que só poderiam ser observadas em campo. A implementação destas condições recebe um tratamento diferenciado em virtude das diferentes condições de contorno impostas à solução numérica do problema.
Diversas aplicações são encontradas para o simulador, dentre elas: a parametrização e análise de poços, a aplicação em cursos de capacitação técnica para técnicos e engenheiros, a realização de testes em controladores, sistemas supervisórios e a validação de algoritmos de controle.
Abstract
This work proposes a computer simulator for sucker rod pumped vertical wells. The simulator is able to represent the dynamic behavior of the systems and the computation of several important parameters, allowing the easy visualization of several pertinent phenomena. The use of the simulator allows the execution of several tests at lower costs and shorter times, than real wells experiments.
The simulation uses a model based on the dynamic behavior of the rod string. This dy-namic model is represented by a second order partial differencial equation. Through this model, several common field situations can be verified. Moreover, the simulation includes 3D animations, facilitating the physical understanding of the process, due to a better visual inter-pretation of the phenomena. Another important characteristic is the emulation of the main sensors used in sucker rod pumping automation. The emulation of the sensors is implemented through a microcontrolled interface between the simulator and the industrial controllers. By means of this interface, the controllers interpret the simulator as a real well.
A "fault module" was included in the simulator. This module incorporates the six more important faults found in sucker rod pumping. Therefore, the analysis and verification of these problems through the simulator, allows the user to identify such situations that otherwise could be observed only in the field. The simulation of these faults receives a different treat-ment due to the different boundary conditions imposed to the numeric solution of the prob-lem.
Possible applications of the simulator are: the design and analysis of wells, training of technicians and engineers, execution of tests in controllers and supervisory systems, and vali-dation of control algorithms.
8
CONTEÚDO
1 Introdução... 17
1.1
Proposta de Simulação... 19
2 Métodos de Elevação... 21
2.1
Elevação Natural... 22
2.2
Etapas de Fluxo
... 22
2.2.1 Fluxo no Meio Poroso... 23
2.2.2 Fluxo na Coluna de Produção... 25
2.2.3 Fluxo na Superfície... 26
2.3
Elevação Artificial... 26
2.3.1 Gas-Lift... 27
2.3.2 Plunger Lift... 28
2.3.3 Bombeio por Cavidades Progressivas – BCP... 29
3 Bombeio Mecânico (BM) ... 31
3.1
Componentes do BM... 32
3.1.1 Descrição do Ciclo de Bombeio... 33
3.1.2 Bomba de Fundo ou Subsuperfície... 35
3.1.3 Coluna de Hastes... 39
3.1.4 Carta Dinamométrica... 42
3.1.5 Unidade de Bombeio... 44
3.1.6 Caixa de Redução... 52
3.1.7 Motor... 53
4 Modelagem do Sistema... 55
4.1
Método Convencional
... 56
4.2
Método
API
... 59
4.3
Modelagem Dinâmica
... 60
4.3.1 Método de Lea... 62
5 Simulador de Bombeio Mecânico ... 71
5.1
Princípio de Funcionamento
... 71
5.2
Animação em
Opengl
... 88
5.3
Módulo de Falhas... 91
5.3.1 Haste Partida... 93
5.3.2 Pistão Preso... 96
5.3.3 Eficiência da Bomba de Fundo... 98
5.3.4 Bloqueio de Gás... 98
5.3.5 Pancada de Fluido (Fluid Pound)... 99
5.3.6 Parafinação...100
5.5
Interface Microcontrolada
... 102
5.6
Validação do Simulador
... 104
6 Conclusão ...107
Anexo 1 – Fórmula de Mills ...110
Anexo 2 – Comportamento da Coluna de Hastes...112
10
LISTA DE FIGURAS
Figura 1.1 Tela do simulador de BM. ... 19
Figura 2.1 Tipos de fluxo de um poço surgente... 23
Figura 2.2 Curva de IPR para o modelo linear... 24
Figura 2.3 Curva de IPR para o modelo de Vogel... 24
Figura 2.4 Combinação da curva de IPR versus a curva de TPR. ... 26
Figura 2.5 Poço equipado com gas-lift. ... 28
Figura 2.6 Poço equipado com o método plunger lift... 29
Figura 2.7 Poço equipado com BCP... 30
Figura 3.1 Métodos de elevação artificial... 31
Figura 3.2 Principais partes de um sistema de BM. ... 33
Figura 3.3 Partes da bomba de fundo. ... 34
Figura 3.4 Curso ascendente e descendente... 35
Figura 3.5 Bomba tubular e bomba insertável. ... 37
Figura 3.6 Designação API para bombas. ... 38
Figura 3.7 Válvula esfera com sede. ... 38
Figura 3.8 Forma de extensão da coluna de hastes... 39
Figura 3.9 Coluna de hastes combinada. ... 41
Figura 3.10 Carta dinamométrica ideal e com efeito do alongamento das hastes... 43
Figura 3.11 Carta dinamométrica. ... 44
Figura 3.12 Unidade de bombeio... 45
Figura 3.13 Geometria da unidade de bombeio convencional... 48
Figura 3.14 Movimento da haste polida... 49
Figura 3.15 Velocidade e aceleração da haste polida. ... 50
Figura 3.16 Curvas de fator de torque. ... 51
Figura 3.17 Curvas de torque. ... 52
Figura 3.18 Caixa de redução. ... 53
Figura 4.1 Definição da variável deslocamento. ... 61
Figura 4.2 Deslocamento na bomba de fundo. ... 65
Figura 4.3 Seções de uma coluna de hastes combinada. ... 69
Figura 5.1 Fluxograma de funcionamento do simulador... 73
Figura 5.2 Distribuição de classes no simulador de BM. ... 74
Figura 5.3 Janela reservatório. ... 74
Figura 5.4 Poço com pontos de pressão e nível no anular. ... 76
Figura 5.5 Gráfico para curva de IPR linear. ... 77
Figura 5.6 Gráfico para curva de IPR Vogel. ... 78
Figura 5.7 Janela esquema mecânico. ... 78
Figura 5.8 Janela de seções de hastes... 79
Figura 5.9 Janela poço... 80
Figura 5.10 Janela de unidade de bombeio... 81
Figura 5.11 Gráficos da cinemática da unidade de bombeio... 82
Figura 5.12 Gráfico do fator de torque... 83
Figura 5.13 Gráfico dos torques da unidade de bombeio... 83
Figura 5.14 Campo posição dos contrapesos... 84
Figura 5.15 Botão ligar simulação. ... 84
Figura 5.16 Botões desligar simulação e parar motor. ... 85
Figura 5.17 Janela de discretização de cartas. ... 86
Figura 5.19 Botão de visualização do grid de variáveis dinâmicas. ... 87
Figura 5.20 Variáveis dinâmicas do simulador... 87
Figura 5.21 Unidade de bombeio em opengl... 89
Figura 5.22 Coluna de produção em opengl. ... 89
Figura 5.23 Enchimento parcial da bomba... 90
Figura 5.24 Animação da bomba de fundo em sincronismo com as cartas dinamométricas. 91 Figura 5.25 Módulo de falhas do simulador de BM. ... 92
Figura 5.26 Modelo de carta dinamométrica para falha de haste partida. ... 94
Figura 5.27 Cartas dinamométricas medida x simulada (CAM -954)... 95
Figura 5.28 Cartas dinamométricas com haste partida (CAM-954). ... 95
Figura 5.29 Carta dinamométrica de haste partida com menor CPM. ... 96
Figura 5.30 Carta dinamométrica para a falha de pistão preso. ... 97
Figura 5.31 Carta de fundo na situação de pistão preso. ... 97
Figura 5.32 Carta dinamométrica com interferência de gás. ... 99
Figura 5.33 Botão do controle de pump-off. ...100
Figura 5.34 Carta dinamométrica com o ponto de pump-off. ...101
Figura 5.35 Tempo de espera para simulação de pump-off...101
Figura 5.36 Ponto de pump-off fora da área da carta. ...102
Figura 5.37 Interface microcontrolada. ...103
Figura 5.38 Esquema de interfaceamento simulador, placa e controlador. ...104
Figura 5.39 Avaliação de cartas dinamométricas do poco MO-30...105
12
LISTA DE TABELAS
Tabela 3-1 Propriedades mecânicas das hastes. ... 40 Tabela 3-2 Coeficientes de Fourier para uma geometria de unidade de bombeio
LISTA DE SÍMBOLOS
A Distância do mancal de sela ao centro da cabeça da UB, mm (in);
Ai Coeficientes de Fourier;
amax Aceleração máxima das hastes no método convencional, m/s2 (ft/s2);
AOFP Absolute Open Flow Potential, m3/dia;
AP Área da seção transversal do pistão, m2 (in2);
API Grau API do óleo;
Ar Área da seção transversal da haste, m2 (in2);
Ar1 Área da seção transversal da haste mais próxima à bomba, m2 (in2);
Arp Área da seção transversal da haste polida, m2 (in2);
At Área da seção transversal da coluna de produção, m2 (in2);
B Desbalanceio estrutural da unidade, kgf;
BgS Fator de volume de formação do gás;
Bi Coeficientes de Fourier;
BLS Fator de volume de formação da fase líquida;
Bo Fator de volume de formação do óleo;
BSW Percentual de água e sedimentos do fluido produzido;
c Fator de amortecimento, s-1;
C Distância do mancal de sela ao centro da barra equalizadora, mm (in);
C Número de Courant;
cD Coeficiente de amortecimento adimensional;
CLF Fator de carga cíclica;
CPM Ciclos por minuto;
d densidade;
Db Profundidade da bomba, m (ft);
dp Diâmetro do pistão, m (pol);
Ef Empuxo na coluna de hastes devido ao fluido, N (lbf);
eP Elongação devido à aceleração (overtravel), m (pol);
er Elongação das hastes, m (pol);
Er Módulo de elasticidade do material das hastes, Pa (psi);
Es Eficiência de separação de gás no fundo;
et Elongação da coluna de produção, m (pol);
Et Módulo de elasticidade do material da coluna de produção, Pa (psi);
Ev Eficiência volumétrica;
Fac Força de aceleração, N (lbf);
FD Esforço dinâmico, N (lbf);
Ff Força de fricção, N (lbf);
Fo Carga no pistão devido ao fluido, N (lbf);
Fs Carga nas hastes, N (lbf);
FSV Carga estática sobre a válvula de pé, N (lbf);
fT Fator de torque, m (ft);
FTV Carga estática sobre a válvula de passeio, N (lbf);
g Aceleração da gravidade, m/s2 (ft/s2);
grad Gradiente de pressão;
H Nível de fluido no anular (H=L se o nível de fluido no anular está na bomba);
I Distância horizontal do eixo da manivela ao centro do mancal de sela, mm (in);
ianc Ancoragem da coluna de produção (0 ancorada e 1 quando não);
14
IPR Inflow Performance Relationship;
Irms Corrente eficaz no motor (A);
Imed Corrente média no motor (A);
J Distância do centro do mancal crankpin ao mancal de sela, mm (in);
K Distância do eixo da manivela ao mancal de sela, mm (in);
K1 Fator geométrico utilizado no modelo de Lea;
K2 Fator geométrico utilizado no modelo de Lea;
K3 Fator geométrico utilizado no modelo de Lea;
K4 Fator geométrico utilizado no modelo de Lea;
L Profundidade da coluna de hastes, m (ft);
Lk Comprimento da seção k das hastes, m (ft);
M Momento máximo dos contrapesos, (in. lbs);
mcp Massa dos contrapesos, kgf;
Mm Torque da manivela sem contrapesos, (lbf.in);
MPRL Carga mínima na haste polida, N (lbf);
N Freqüência de bombeio (CPM – ciclos por minuto);
ND Nível Dinâmico, m (in);
P Comprimento da biela, mm (in);
Pd Pressão na descarga da bomba, Pa (psi);
PD Pump displacement, m3/dia;
Pe Pressão estática do reservatório, Pa (psi);
Pg Pressão da coluna de gás,Pa (psi);
PPRL Carga máxima na haste polida, N (lbf);
PRHP Potência na haste polida, (hp);
Ps Pressão na sucção da bomba, Pa (psi);
Pseg Fração de Potência;
PT Torque máximo, N.m (lbf.in);
Ptf Pressão na cabeça, Pa (psi);
Pwf Pressões de fluxo no fundo do poço, Pa (psi);
pwh Pressão na coluna de produção medida na cabeça do poço, Pa (psi);
q Vazão do reservatório (m3/dia);
qb deslocamento volumétrico da bomba (m3/dia);
Qb Vazão da bomba, m3/dia;
qL Vazão de líquido, m3/dia;
qmax Vazão máxima do reservatório, m3/dia;
qsup Vazão na superfície, m3/dia;
R Raio da manivela, mm (in);
R Razão gás/óleo de produção, m3/m3 (ft3/bbl);
rr Diâmetro da coluna de haste, m (in);
Rs Razão de solubilidade do gás no óleo, m3/m3 (ft3/bbl);
rt Diâmetro da coluna de produção, m (in);
s Comprimento medido à partir da bomba, ao longo das hastes, m (ft);
S Curso da haste polida, m (in);
Sadm Tensão máxima admissível nas hastes, Pa (psi);
SF Fator de serviço;
Smax Tensão mínima presente na haste, Pa (psi);
Smin Tensão máxima presente na haste, Pa (psi);
SP Curso efetivo do pistão, m (in);
T Tensão de ruptura mínima, Pa (psi);
u Representa o deslocamento de um ponto da coluna de hastes, m (ft);
Ur Perímetro da seção circular das hastes, m (ft);
v Velocidade do som nas hastes, m/s (ft/s);
vf Velocidade do fluido, m/s (ft/s);
vp Velocidade do pistão, m/s (ft/s);
vr Velocidade das hastes, m/s (ft/s);
W carga na haste polida, N (lbf);
Wb Peso do fluido deslocado pelas hastes, N (lbf);
Wf Peso do Fluido, N (lbf);
Wr Peso das hastes no ar, N (lbf);
xcp Distância dos contrapesos, m (in);
? Fator de aceleração ou impulso;
? Tensão de cisalhamento, Pa (psi);
?1 Gravidade específica do fluido;
?f Massa específica do fluido, kg/m3 (lb/ft3);
?rk Massa específica do material das hastes, kg/m3 (lb/ft3);
? Velocidade angular, rad/s;
? Ângulo da manivela, rad;
? Viscosidade do fluido, Pa.s (cp);
? Coeficiente do atrito de Coulomb;
? Ângulo entre C e P, graus;
? Ângulo entre C e K, graus;
? t Ângulo entre C e K, no top stroke, graus;
? b Ângulo entre C e K, no bottom stroke, graus;
? Ângulo entre a posição 12 horas e K, graus;
Subscritos e Sobrescritos
A Curso ascendente;
b Bottom Stroke;
b No interior da bomba de fundo;
d @ pressão e temperatura de descarga;
D Curso descendente;
f fluido;
g gás;
i Índice de posição no esquema de diferenças finitas;
j Índice de tempo no esquema de diferenças finitas;
k Índice da seção da coluna de hastes combinada;
L Líquido;
max Máximo;
min Mínimo;
N Net (Líquido); oleo Óleo;
p Pistão;
r Haste
s @pressão e temperatura de sucção;
16
Capítulo 1
Introdução
A simulação computacional é um processo de experimentos em sistemas ou fenôme-nos físicos, realizados através de modelos matematicamente computadorizados, os quais re-presentam características observadas em sistemas reais [1].
A partir da simulação computacional é possível a análise de diferentes tipos de siste-mas, possibilitando:
? um maior domínio e conhecimento na operação dos sistemas; ? melhor desempenho dos sistemas;
? o teste de novos conceitos ou técnicas antes da implementação física, e ? a obtenção de informações sem perturbar o sistema real.
Através de simuladores é possível a visualização das principais etapas de um processo, examinando-se as suas formas de operação e entendendo-se suas principais conexões com ambientes externos, sem a necessidade de se parar o processo real, o que poderia resultar em perturbações inconvenientes ao sistema. Assim, a análise de sistemas em ambientes computa-cionalmente simulados pode cooperar na melhoria de processos e no emprego de novas técni-cas, sem possíveis desgastes ao sistema real.
Dentre as muitas vantagens dos simuladores, podem ser citadas [1]: ? a realização de experiências em um tempo curto e
? a fácil demonstração do processo.
18 anos para ocorrerem, porém, com o advento da simulação computacional, este tempo pode ser reduzido para frações de tempo muito pequenas. Este fenômeno pode ocorrer também com os métodos de elevação artificial de petróleo, que em geral possuem uma dinâmica lenta. Com isto, situações que poderiam ser impraticáveis de se analisar, devido ao tempo, podem, através de simulação, ser estudadas de forma robusta e por repetidas vezes.
Na falta de simuladores computacionais, os engenheiros e cientistas são, muitas vezes, obrigados a analisar os processos, utilizando técnicas matemáticas e probabilísticas. Porém, estas técnicas, na sua grande maioria, possuem aproximações e simplificações, fornecendo resultados estatísticos em um único instante de tempo, muitas vezes, imprecisos. Fora dessa realidade, encontram-se os simuladores capazes de simular dinamicamente processos em tem-po real, livrando os engenheiros e cientistas de complicados cálculos [1].
Hoje, com os avanços computacionais, a área de simulação computacional emprega cada vez mais recursos em animações gráficas, facilitando o entendimento do processo. A utilização de animações em simuladores pode ajudar na compreensão do comportamento do processo, pois sem as animações o usuário ficaria limitado à interpretação de um possível grupo de tabelas ou números em forma textual.
Embora os simuladores possuam inúmeras vantagens, existem também algumas limi-tações, as quais não estão relacionadas ao modelo imposto no simulador, e sim a expectativas geradas sobre o simulador. As limitações podem ser:
? uma simulação não pode dar resultados precisos quando os dados de entrada foram imprecisos;
? a simulação não pode dar respostas fáceis a problemas complexos, e ? a simulação não pode solucionar problemas por si só.
O termo utilizado na literatura para os resultados imprecisos de uma simulação, devido a parâmetros de entrada incorretos, é “garbage in, garbage out” (lixo entrando, lixo saindo), ou seja, não adianta o modelo estar perfeitamente correto se os dados de entrada não forem confiáveis. Por isto, muitos simuladores hoje tentam realizar rotinas de verificação e consis-tência de dados para exporem possíveis erros ao usuário.
1.1
Proposta de Simulação
O simulador proposto neste trabalho é uma das ferramentas desenvolvidas dentro do Projeto Automação de Poços (AUTPOC). Este projeto é uma parceria UFRN/Petrobras, atra-vés do Centro de Pesquisas e Desenvolvimento da Petrobras (CENPES), visando o desenvol-vimento de equipamentos e sistemas computacionais para supervisão, simulação, otimização e controle dos métodos de elevação em poços automatizados.
Neste trabalho, apresenta-se o desenvolvimento do simulador de Bombeio Mecânico, cuja proposta básica é representar a dinâmica deste método de elevação artificial de petróleo, permitindo que o usuário explore diversas situações que só são observadas em campo, auxili-ando-o na tomada de decisões e no projeto de novas instalações. Tudo isso, em um tempo hábil, a partir de uma simples simulação computacional. A Figura 1.1 exibe uma tela do Si-mulador de BM.
Figura 1.1 Tela do simulador de BM.
Dentre as aplicações deste simulador, destacam-se:
? a utilização da ferramenta em cursos de formação profissional;
? a análise e estimação de parâmetros importantes no projeto de sistemas de BM; ? a possibilidade de testar novas técnicas de controle (algoritmos);
20 ? a determinação do tempo requerido para o poço atingir o regime permanente; ? a análise e detecção de condições de falhas;
? uma melhor interpretação de cartas dinamométricas.
Outra característica interessante deste simulador é a emulação de sensores utilizados na automação de BM. Através de uma interface microcontrolada, os principais sensores da automação BM são emulados e conectados a um controlador de BM, permitindo que este compreenda os sinais recebidos, como se provenientes de um poço real.
As aplicações de um software simulador de BM são inúmeras, permitindo a realização de várias experiências e a observação de fenômenos muito específicos deste sistema. Entre-tanto, o usuário deve formular suas estratégias, adquirir dados confiáveis e organizar os resul-tados obtidos, a fim de uma melhor análise do problema.
O capítulo 2 contém uma breve descrição sobre os mecanismos de elevação natural e artificial, destacando, resumidamente, as características dos principais métodos de elevação. O Capítulo 3 tem o objetivo de apresentar os fundamentos do método de elevação bombeio mecânico, sendo descritas as principais partes e elementos do sistema. No capítulo 4 são a-bordados os três principais métodos para o cálculo dos parâmetros básicos de um projeto de BM, sendo também descrito o processo de solução numérica do modelo utilizado no dor. O Capítulo 5 compreende o desenvolvimento, as funcionalidades e recursos do simula-dor. O Capítulo 6 expõe a conclusão deste trabalho e cita algumas recomendações para traba-lhos futuros.
Capítulo 2
Métodos de Elevação
A produção de petróleo envolve vários sistemas distintos, mas intimamente conecta-dos: o reservatório, que consiste de uma rocha formada por espaços vazios (porosidade), que podem estar interconectados (permeabilidade) ou não, com a capacidade de armazenar flui-dos; e as estruturas artificiais, que incluem o poço, os equipamentos de elevação, as facilida-des de produção, separadores e os tanques de armazenamento [2].
Na engenharia de petróleo, a área responsável pela maximização da produção possível de poços é a engenharia de elevação. A aplicação das técnicas de engenharia de elevação está relacionada diretamente com outras áreas de grande importância da engenharia de petróleo, tais como: prospecção de petróleo, perfuração, completação, avaliação de formações e enge-nharia de reservatórios [2].
A prospecção de petróleo envolve uma grande e complexa análise de dados geofísicos e geológicos das bacias sedimentares, visando reconhecer as situações mais favoráveis para o armazenamento de petróleo. Após esta avaliação, se decide a perfuração de um novo poço [3]. A perfuração é a etapa que mais exige investimentos [3], porém com os avanços tec-nológicos, hoje é possível a obtenção de diversas configurações de perfuração, até mesmo poços direcionais e com longas seções horizontais.
A fase de completação trabalha juntamente com a fase de perfuração, tendo o objetivo de preparar o poço, deixando-o em condições de operação ao longo de toda a sua vida produ-tiva. Nesta fase são utilizadas diversas operações destinadas a colocar o poço para produzir óleo ou gás [3].
reser-22 vas de óleo e gás, verificando se a produção é comercial ou não. Nesta fase são utilizadas principalmente técnicas de perfilagem a poço aberto e testes de produção [3].
A área de elevação, seja natural ou artificial, compreende a extração de fluidos do re-servatório para a superfície. Esta fase também se caracteriza pela avaliação das jazidas e das propriedades dos fluidos contidos na formação, visando maximizar a produção de fluidos com o menor custo possível.
2.1 Elevação Natural
No início da vida produtiva da maioria dos poços a pressão do reservatório é geral-mente elevada, permitindo o fluxo livre dos fluidos presentes no reservatório para a superfí-cie, este fenômeno é conhecido como Elevação Natural [3].
A elevação natural geralmente ocorre no início da vida produtiva das jazidas. Entre-tanto, em virtude da produção contínua, a pressão do reservatório diminui, não sendo mais suficiente para vencer as perdas de pressão no caminho até a superfície.
Os poços que produzem por elevação natural são denominados de poços surgentes (flowing wells). Estes poços em sua grande maioria não apresentam problemas técnicos ou operacionais e produzem com menores custos [3].
2.2 Etapas de Fluxo
Reservatório Fluxo no meio Poroso Fluxo na Coluna de Produção Fluxo na Superfície
Gás
Líquido
Figura 2.1 Tipos de fluxo de um poço surgente
2.2.1 Fluxo no Meio Poroso
O fluxo no meio poroso é a migração de fluidos do reservatório, ou formação, para o poço.
A capacidade de produção do reservatório pode ser avaliada por dois modelos, o mo-delo linear e o Vogel. Os dois momo-delos estão intimamente relacionados ao índice de produti-vidade do poço. Este índice é empregado para estimar a vazão do poço para diferentes pres-sões de fluxo no fundo do poço (Pwf) [3]. Para o modelo linear ele é determinado por:
wf e P
P q IP
? ?
sendo q a vazão do reservatório, Pe a pressão estática do reservatório e IP o índice de produti-vidade.
A equação 2.1 representa uma curva conhecida como IPR (Inflow Performance Rela-tionship), onde a vazão varia linearmente com a pressão de fluxo. As curvas de IPR podem ser do tipo Linear ou Vogel. A Figura 2.2 representa a curva de IPR para o modelo linear.
24 P re ss ão d e F lu xo n o F un do P w f Vazão AOFP IPR
Figura 2.2 Curva de IPR para o modelo linear
O ponto onde as curvas de IPR intercepta o eixo de vazão é conhecido como “potenci-al do poço” ou AOFP (Absolute Open Flow Potential). Este ponto representa a máxima vazão do reservatório para pressão de fluxo zero. Porém, esta vazão é apenas teórica, pois na prática não é possível reduzir a pressão de fluxo no fundo a zero.
O modelo linear se aplica quando a pressão de fluxo está acima do ponto de bolha [4], ou mais especificamente quando as pressões no meio poroso estão acima da pressão de satu-ração do óleo [3]. Nos casos onde o reservatório produz óleo com gás em solução, ou seja, as pressões no reservatório estão abaixo da pressão de saturação do óleo, se faz necessário a uti-lização do modelo de Vogel, que é representado pela seguinte equação:
2 8 . 0 2 . 0 1 ??? ? ??? ? ? ??? ? ??? ? ? ? e wf e wf P P P P AOFP q
onde qmax é a vazão máxima.
A Figura 2.3 apresenta a curva de IPR para o modelo Vogel.
/qmaxQq
P
w
f/P
e
IPR
Figura 2.3 Curva de IPR para o modelo de Vogel.
Caso a pressão estática Pe seja menor que a pressão de saturação Psat, deve-se analisar o potencial do reservatório utilizando uma curva de Vogel. Porém, se a Pe é maior que a Psat é necessário utilizar uma curva composta (IPR Linear + Vogel).
Na análise das curvas de IPR se observa o diferencial de pressão necessário para que ocorra fluxo do reservatório para o poço. A diferença de pressão entre a pressão de fluxo no fundo do poço Pwfe a pressão estática do reservatório Pe, denominada de drawdown (Pe-Pwf), é responsável pelo fluxo da formação para o poço [6]. O fluxo da formação para o poço ocor-re, portanto, quando a pressão de fluxo no fundo é menor que a pressão estática da formação. A escolha do melhor método de elevação para um poço está associada ao estudo da capacidade de produção atual do reservatório, a performance futura de produção do mesmo e muitos outros fatores. O bom conhecimento destes parâmetros através das curvas de IPR im-plica na realização de projetos sem superdimensionamento dos equipamentos de produção e sem limitações ou restrições ao fluxo [6].
2.2.2 Fluxo na Coluna de Produção
Para que seja possível a chegada do fluido à superfície é necessário que a pressão de fluxo no fundo seja maior que a soma de todas as perdas de carga na coluna de produção.As perdas de pressão na coluna podem ser: a própria coluna hidrostática do fluido, as perdas por fricção, as perdas nas restrições (regulador de fluxo, válvulas, etc.), as perdas na linha de pro-dução, as perdas devido a aceleração do fluido e a pressão nos equipamentos de separação [3].
É interessante observar os diferenciais de pressão responsáveis pelos fluxos no meio poroso e na coluna de produção. No meio poroso, quanto maior a vazão requerida, menor deve ser a pressão de fluxo no fundo do poço. Já na coluna de produção, quanto maior a va-zão, maior deve ser pressão de fluxo no fundo. Na verdade, existe uma oposição de solicita-ções no fundo.
A habilidade de entrega dos fluidos da coluna de produção para a superfície está rela-cionada ao que a literatura chama de TPR (Tubbing Pressure Requeriment), onde para uma requerida pressão na cabeça Ptf, existe uma correspondente pressão de fluxo no fundo Pwf, que é função do diferencial de pressão hidrostático e das perdas de fricção.
26 da aplicação de um balanço de energia. Na Figura 2.4 são apresentadas as curvas retratadas acima.
Figura 2.4 Combinação da curva de IPR versus a curva de TPR.
A interseção das duas curvas provê uma vazão e uma pressão de fluxo esperada para o fluxo na coluna. Entretanto, este tipo de análise, na maioria das vezes, é utilizado apenas em poços surgentes.
Usualmente a curva TPR é considerada linear com uma relativa inclinação. Já para al-tos valores de GLR (razão gás líquido) ou poços de gás, a curva de TPR não é linear.
2.2.3 Fluxo na Superfície
O fluxo na superfície corresponde ao transporte de fluidos da cabeça do poço ( wellhe-ad) para as facilidades de produção. Seu principal representante é a linha de produção. Nesta fase é interessante observar como os fluidos se movimentam através dos dutos e reguladores. Por isso, deve-se conhecer os padrões de fluxo na horizontal (bolha, golfada), sabendo que os mesmos afetam o gradiente dinâmico de pressão na tubulação, onde qualquer mudança de regime implica diretamente no regime de fluxo [3].
2.3 Elevação Artificial
Existem diversos métodos de elevação artificial e todos funcionam com o mesmo princípio. Suprem energia da superfície para o fundo do poço, a fim de elevar os fluidos con-tidos no reservatório para a superfície.
Os mecanismos de elevação artificial podem ser distinguidos através das seguintes características [6]:
? utilização de bombas de fundo ou downhole pump para aumentar a pressão no po-ço e vencer as perdas de pressão da coluna;
? injeção contínua de gás comprimido no fundo do poço, para através da energia de expansão do gás e a redução da densidade do fluido, deslocar os fluidos para as fa-cilidades de produção, e
? injeção de gás a alta pressão elevando o liquido acima de um ponto de injeção.
Os métodos de elevação artificial mais conhecidos são: ? Bombeio Mecânico (BM);
? Bombeio por Cavidades Progressivas (BCP); ? Bombeio Centrífugo Submerso (BCS); ? Bombeio Hidráulico a Jato (BHJ);
? Gas-lift contínuo e intermitente (GLC e GLI), e ? Plunger-lift.
Cada método possui suas vantagens e desvantagens, tornando a escolha de um método de elevação artificial dependente de vários fatores, dentre os quais se destacam: a geometria do poço, quais fluidos são produzidos no poço, a viscosidade, a profundidade do reservatório, a razão gás-óleo (RGO), segurança e os custos [3].
A seguir serão apresentados, de forma resumida, alguns dos principais métodos de e-levação artificial existentes na industria do petróleo. Já no capítulo posterior o destaque é para o método de bombeio mecânico.
2.3.1 Gas-Lift
28 poços que produzem fluidos com alto teor de areia e elevada razão gás-líquido [3]. Existem dois tipos de gas-lift – o contínuo e o intermitente.
No gas-lift contínuo o gás é injetado na coluna de produção gaseificando a coluna de fluido, reduzindo as perdas de pressão ao longo da coluna. Assim, a pressão do reservatório torna-se suficiente para elevar a mistura gás-líquido para a superfície [6]. A Figura 2.5 mostra um poço equipado com gas-lift contínuo.
Figura 2.5 Poço equipado com gas-lift.
No gas-lift intermitente o gás é injetado periodicamente a alta pressão, sempre que uma coluna de fluido acima do ponto de injeção esteja em um nível razoável. O gás é injetado abaixo da coluna de fluido elevando-o como uma grande golfada. Logo após, a injeção é in-terrompida até que uma nova coluna de fluido seja formada novamente.
2.3.2 Plunger Lift
O pistão tem uma função muito importante no método, permitindo que todo o fluido acima dele alcance a superfície, evitando o retorno de líquido (fallback) para o fundo. Outro grande papel do pistão é a remoção de incrustações (scale) ou hidratos da parede da coluna de produção [7]. A Figura 2.6 apresenta um poço equipado com o método plunger lift.
Sensor de Pressão Sensor de Chegada Lubrificador
Pistão
Mola Amortecedora Controlador
Válvula pneumática
Figura 2.6 Poço equipado com o método plunger lift.
É interessante observar que o plunger lift é muito similar ao gas-lift intermitente, pos-suindo como grande diferencial a presença do elemento pistão.
2.3.3 Bombeio por Cavidades Progressivas – BCP
30
Capítulo 3
Bombeio Mecânico (BM)
Historicamente, o primeiro método de elevação artificial que surgiu na indústria do petróleo foi o bombeio mecânico (Sucker-rod Pumping), surgindo logo após o nascimento da indústria do petróleo. Sua importância se reflete no número de instalações existentes, que cor-respondem a 80% dos poços produtores mundiais, o que lhe dá a posição de método mais uti-lizado no mundo [8]. No Brasil, responde por cerca de 8% da produção diária de petróleo, equipando em torno de 80% dos poços produtores [4]. A Figura 3.1 mostra como o número de instalações de bombeio mecânico se destaca, em relação a outros métodos de elevação. Os dados são de uma das Unidades de Negócios da Petrobras.
Métodos de Elevação Artificial
87%
2% 2% 1%
2% 6%
BM BCP BCS GLC SURG OUTROS
32 O bombeio mecânico tem sua popularidade relacionada ao baixo custo com investi-mentos e manutenção, flexibilidade de vazão e profundidade, boa eficiência energética e a possibilidade de operar com fluidos de diferentes composições e viscosidades em uma larga faixa de temperatura [8].
As principais vantagens do BM são: a simplicidade de operação, manutenção e projeto de novas instalações; a partir de condições normais pode ser utilizado até o fim da vida produ-tiva de um poço e a capacidade de bombeio pode ser modificada, em função das mudanças de comportamento do poço [6]. Porém, a principal vantagem deste método diz respeito ao menor custo/produção ao longo da vida produtiva do poço.
3.1
Componentes do BM
Existe uma divisão básica de componentes no BM. Os componentes de superfície e os componentes de fundo [6]. Estes dois grandes grupos são listados a seguir.
Os componentes de superfície são: o motor (prime mover), a caixa de redução (gear box), a unidade de bombeio (pumpingunit) e a haste polida (polishedrod). Já os componentes de fundo são: a coluna de hastes (rodstring) e a bomba de fundo (downholepump). A Figura 3.2 exibe as principais partes de um sistema de bombeio mecânico.
Figura 3.2 Principais partes de um sistema de BM.
3.1.1 Descrição do Ciclo de Bombeio
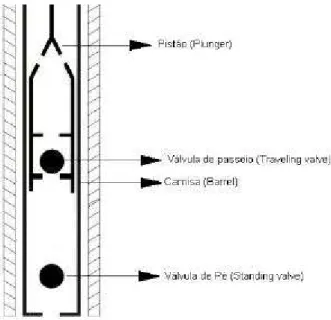
É importante que se conheça o ciclo de bombeio para entender como funcionam as partes vitais do sistema. Para explicar-se o ciclo de bombeio é necessário o conhecimento das partes integrantes da bomba. São elas:
? pistão (plunger), que contém uma válvula de descarga chamada de válvula de pas-seio (travelling valve);
? camisa da bomba (barrel), e
34 A Figura 3.3 mostra as partes constituintes da bomba.
Figura 3.3 Partes da bomba de fundo.
A ação de bombeio ocorre da seguinte forma: no início do curso ascendente ( upstro-ke), logo após o pistão ter alcançado o ponto morto inferior (bottom stroke), a válvula de pas-seio fecha devido à alta pressão hidrostática causada pelo fluido que está na coluna de produ-ção. No curso ascendente, a pressão interna no corpo da bomba, entre o pistão e a válvula de pé, diminui, e a pressão na entrada da bomba abre a válvula de pé, permitindo que o fluido no espaço anular (espaço entre o revestimento do poço e a coluna de produção) preencha a bom-ba. No curso ascendente é importante observar que o peso da coluna de líquido acima do pis-tão é elevado e sustentado pela válvula de passeio. Este efeito causa o possível alongamento das hastes [6].
Figura 3.4 Curso ascendente e descendente.
É bom observar que o curso do pistão muitas vezes não é o mesmo curso na superfície, justamente devido ao comportamento elástico da coluna de hastes. Isto dificulta a modelagem do sistema, pois o movimento do pistão torna-se complexo para uma descrição matemática.
3.1.2 Bomba de Fundo ou Subsuperfície
A bomba de fundo é do tipo deslocamento positivo, ou seja, na teoria o fluido que en-tra na sucção não volta. Seu desempenho é baseado no volume de fluido deslocado. O deslo-camento volumétrico da bomba pode ser determinado por [2]:
N S d
PD P P
2
01853 . 0
?
sendo PD o volume deslocado em (m3/dia), N a freqüência de bombeio (CPM – ciclos por minuto), dp o diâmetro do pistão (pol) e SP curso efetivo do pistão (pol).
Graças à eficiência volumétrica, a vazão na superfície geralmente é menor que o des-locamento volumétrico. A eficiência volumétrica sempre é menor que 100% devido a proble-mas, como: escorregamento do fluido através do pistão, presença de gás livre na bomba, fator de volume de formação (Bo) e desgastes mecânicos nas válvulas. Valores entre 70% e 80% para a eficiência volumétrica são considerados normais. Pode-se definir a eficiência volumé-trica Ev como sendo a relação entre a vazão bruta de líquido Qb e o deslocamento volumétrico
PD, menos possíveis desgastes e/ou vazamentos no sistema.
36
PD Q
E b
v ?
A vazão na superfície é calculada através do deslocamento volumétrico da bomba so-bre o fator de volume de formação, vide a equação 3.2.
o P P
B
N S d q
2
sup
01853 . 0
?
3.1.2.1 Tipos de Bomba
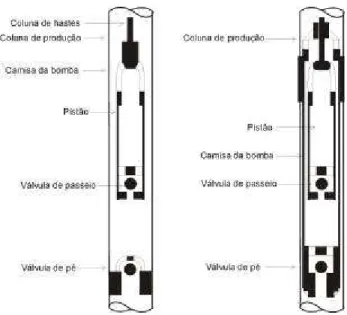
Existe basicamente dois tipos de bomba, sendo que a diferença entre elas está na for-ma como são instaladas no poço. São elas: as bombas tubulares (tubing pump) e as bombas insertáveis (insert pump).
As bombas tubulares são instaladas no poço com a coluna de produção, sendo a cami-sa da bomba parte integrante da coluna de produção. O pistão e a válvula de passeio são en-roscados na extremidade da coluna de hastes, já a válvula de pé pode ser descida junto com a coluna de produção ou descida com o pistão, desde que o pistão seja apropriado para tal tare-fa. Este tipo de bomba apresenta uma maior capacidade de bombeamento para um dado diâ-metro de tubulação [8]. A sua principal limitação está relacionada à necessidade de se mano-brar toda a coluna de produção, caso haja danos na camisa da bomba.
As bombas insertáveis possuem todas as suas partes conectadas junto à coluna de has-tes e necessitam apenas de um mecanismo que prenda a parte estacionária da bomba (camisa) a coluna de produção. Sua principal vantagem é a possibilidade de ser completamente substi-tuída através de uma simples manobra de coluna de hastes [8]. A Figura 3.5 apresenta uma bomba do tipo tubular e uma do tipo insertável.
Figura 3.5 Bomba tubular e bomba insertável.
3.1.2.2 Pistões
Existem dois tipos de pistão: pistão metálico, que pode ter sua superfície lisa (plain) ou ranhurada (grooved) e o pistão flexível, que possui corpo constituído de copos ou anéis [9].
O pistão metálico é o mais utilizado, principalmente em grandes profundidades. Ele possui melhor resistência e é relativamente mais caro. Entretanto, o pistão flexível pode cau-sar um menor desgaste à camisa [9].
A diferença entre o pistão ranhurado e o liso não é muito conclusiva segundo a litera-tura, porém, acredita-se que o pistão ranhurado seja melhor para lubrificar e acumular possí-veis sólidos nas ranhuras, evitando-se o desgaste da camisa [9].
38
Figura 3.6 Designação API para bombas.
3.1.2.3 Válvulas
As válvulas são componentes importantes do método de bombeio mecânico, pois a e-ficácia de bombeio depende principalmente da operação das válvulas de passeio e de pé. As válvulas são do tipo ball-and-seat, ou seja, uma esfera e sede que devem criar um perfeito selo impedindo o retorno de fluido [6].
Uma boa operação de bombeio mecânico depende muito do bom funcionamento das válvulas, pois, qualquer simples vazamento nas válvulas pode reduzir bastante a produção, devido à alta pressão hidrostática no fundo do poço. A Figura 3.7 mostra um exemplo de vál-vula com um corte em sua sede.
3.1.2.4 Grau de Corrosão e Abrasão
As principais substâncias causadoras de corrosão são: gás-carbono, gás sulfídrico e sa-linidade. Em poços que apresentam elevadas concentrações destas substâncias, os fabricantes recomendam materiais apropriados. Já a abrasão provocada por areia, necessita de soluções tais como: filtros de areia, folgas no pistão e a instalação da bomba acima dos canhoneados, para evitar penetração de areia.
3.1.3 Coluna de Hastes
A coluna de hastes é considerada a parte vital e crítica do sistema de BM. Ela é a res-ponsável por transmitir energia da superfície para a bomba de fundo. As hastes estão sujeitas a cargas cíclicas e trabalham em ambientes abrasivos e corrosivos [3]. O comportamento das hastes tem um impacto fundamental na eficiência de elevação dos fluidos. Assim, um bom projeto de dimensionamento das hastes pode evitar grandes prejuízos.
A coluna de hastes é uma seqüência de várias hastes, interconectadas umas as outras através de luvas, de maneira que possam alcançar a profundidade da bomba. As hastes são constituídas de aço, normalmente com 25 ft de comprimento. A norma API que padroniza os vários tipos de hastes e seus dimensionamentos é a norma API SPEC 11B [11]. A Figura 3.8 exibe a forma de extensão das hastes. As hastes geralmente possuem pinos em suas extremi-dades já com luvas (coupling), exceto se não for especificado.
Figura 3.8 Forma de extensão da coluna de hastes.
40
Grau API Tensão Mínima de Ruptura psi (Mpa)
Tensão Máxima de Ruptura psi (Mpa)
K 90,000 (620) 115,000 (793)
C 90,000 (620) 115,000 (793)
D 115,000 (793) 140,000 (965)
Tabela 3-1 Propriedades mecânicas das hastes.
As hastes grau C possuem o menor preço, porém suportam um menor nível de tensão e não podem trabalhar junto a H2S. As hastes grau D suportam maiores tensões, mas são muito
sensíveis a H2S. Já as hastes grau K possuem uma resistência razoável a H2S [8].
Existem, também, as hastes fabricadas com fibra de vidro, que devido ao custo eleva-do encontram uma maior aplicação em poços que apresentam sérios problemas de corrosão e cargas elevadas.
A primeira haste da coluna de hastes na superfície é chamada de haste polida, devido a sua superfície externa polida. Sua finalidade é, juntamente com um equipamento chamado
stuffing box, vedar a cabeça do poço contra possíveis vazamentos [3].
A haste polida é a haste que está sujeita as maiores cargas. As cargas que atuam na haste polida são:
? peso das hastes (Wr) – é o peso das hastes no ar;
? força de empuxo (Wb) – é o peso do fluido deslocado pelas hastes;
? força de aceleração (Fac) – é a força que causa a variação de velocidade das hastes. A velocidade é zero no top stroke e no bottom stroke, porém a aceleração é máxi-ma nestes pontos;
? força de fricção (Ff) – Atua no sentido oposto ao movimento das hastes e ocorre devido ao atrito haste/fluido. O seu valor é diretamente proporcional a velocidade das hastes;
? peso do Fluido (Wf) – é o peso da coluna de fluido que está acima do pistão. Esta força atua somente no curso ascendente, justamente quando a válvula de passeio está fechada.
O cálculo da carga total imposta à haste polida é a soma de todas as forças descritas acima.
f ac f b
r W W F F
W
Usualmente a carga na haste polida é medida através de um dinamômetro ou através de células de carga (sensor instalado na haste polida). A carga na haste polida varia durante todo o ciclo de bombeio e sempre é positiva [3].
Na composição da coluna de hastes é necessário, muitas vezes, um projeto de coluna de hastes combinadas. Pois, toda haste deve suportar o peso das hastes situadas abaixo dela. Sendo assim, uma forma de reduzir o peso e a tensão nas hastes superiores é utilizar uma co-luna de hastes combinada. Para este tipo de problema, deve se encontrar o tamanho de cada seção da coluna de hastes. A Figura 3.9 mostra um exemplo de coluna de hastes combinadas.
Figura 3.9 Coluna de hastes combinada.
O problema da composição de uma coluna de hastes combinada consiste na determi-nação do comprimento de cada seção da coluna de hastes. Para tal, existem alguns métodos e simplificações disponíveis.
A norma API RP-11L padroniza a nomenclatura e as combinações possíveis de hastes de bombeio. Uma coluna de hastes combinada possui uma designação composta de dois alga-rismos, onde o primeiro corresponde ao diâmetro da maior haste e o segundo ao diâmetro da menor haste. As demais hastes da coluna possuem um diâmetro intermediário [8].
3.1.3.1 Resistência à Fadiga
As hastes de bombeio sofrem uma grande variação de carga durante os ciclos de bom-beio, logo, estão sujeitas a fadiga. O diagrama de Goodman é uma ferramenta utilizada para garantir que as hastes irão durar no mínimo 10 milhões de ciclos [8]. O diagrama pode ser representado pela seguinte equação:
SF S T
Sadm ?
? ? ?
? ? ?
? 0,55625 min
42 sendo Sadm a tensão máxima admissível, de modo a garantir durabilidade superior a 10 mi-lhões de ciclos, T a tensão de ruptura mínima, Smin a tensão mínima presente na haste e SF corresponde ao fator de serviço. O fator de serviço varia em função do ambiente de trabalho das hastes. Em ambientes não corrosivos este valor é igual a 1.
A tensão mínima é calculada por:
r
A MPRL Smin ?
sendo Ar a área da primeira haste de bombeio e MPRL a carga mínima na haste polida. A tensão máxima é dada por:
r
A PPRL Smax ?
sendo PPRL a carga máxima na haste polida.
Assim sendo, se a tensão máxima Smax for menor que a tensão admissível Sadm a coluna de hastes estará corretamente dimensionada quanto à fadiga.
3.1.4 Carta Dinamométrica
Uma carta dinamométrica é nada mais do que um gráfico representando os efeitos ge-rados pela carga atuante na bomba, durante um ciclo de bombeio. Existem dois tipos de cartas dinamométricas, a carta de superfície e a de fundo. As cargas são registradas na superfície através de dinamômetros e no fundo do poço através de dispositivos especiais ou através de modelos matemáticos.
As cartas dinamométricas estão entre as principais ferramentas de análise e avaliação das condições de bombeio, registrando as cargas na haste polida ou no fundo em função do curso das hastes.
É possível observar diversas condições de bombeio através da carta dinamométrica. As mais importantes informações extraídas da análise de cartas dinamométricas são [6]:
? determinação das cargas que atuam na unidade de bombeio e na haste polida; ? determinação da potência requerida para a unidade de bombeio;
? ajuste do contrabalanço da unidade de bombeio;
? verificação das condições de bombeio da bomba e válvulas, e ? detecção de condições de falha.
(3.6)
Uma carta dinamométrica numa situação ideal, onde se assume uma coluna de hastes sem elasticidade, uma velocidade de bombeio baixa eliminando forças dinâmicas e despre-zando-se todas as perdas ao longo da coluna é mostrada na Figura 3.10, através do retângulo formado pelos pontos 1-2-3-4. No ponto 1, inicia-se o curso ascendente, onde a válvula de passeio está fechada. Instantaneamente se atinge o ponto 2, ou seja, a carga foi transferida da válvula de pé para a de passeio rapidamente. Do ponto 2 ao 3 o pistão está subindo junto com a válvula de passeio até o ponto 3, onde se inicia o curso descendente. Neste instante a válvula de passeio abre e a válvula de pé fecha. Aqui, a transferência de carga entre a válvula de pas-seio para a válvula de pé foi instantânea atingindo o ponto 4. Do ponto 4 ao 1 o pistão está descendo e os esforços estão sobre a válvula de pé e a coluna de produção.
Uma situação mais real, considerando a elasticidade das hastes e as perdas na coluna, é observada no paralelogramo formado pelos pontos 1-2’-3-4’ na Figura 3.10. A transferência de carga nos pontos 1 ao 2’ e 3 ao 4’, ocorre gradualmente em função do alongamento das hastes. Esta forma de carta só é possível ser encontrada em poços de baixa profundidade e operando com baixas velocidades [6].
Figura 3.10 Carta dinamométrica ideal e com efeito do alongamento das hastes.
As condições expostas acima são casos especiais. Na prática, as cartas dinamométricas sofrem deformações devido a diversas situações, dentre as quais podemos citar:
? as cargas dinâmicas que ocorrem devido ao movimento das hastes;
44 ? o stress citado acima pode coincidir com a freqüência fundamental das hastes,
cau-sando mudanças nas cargas;
? a bomba de fundo com as válvulas são fortemente afetadas pela incompressibilida-de dos fluidos, e
? problemas nos equipamentos de fundo também causam mudanças na carga.
Na Figura 3.11 é exibida uma carta dinamométrica típica, onde são mostrados os prin-cipais pontos da carta.
Figura 3.11 Carta dinamométrica.
3.1.5 Unidade de Bombeio
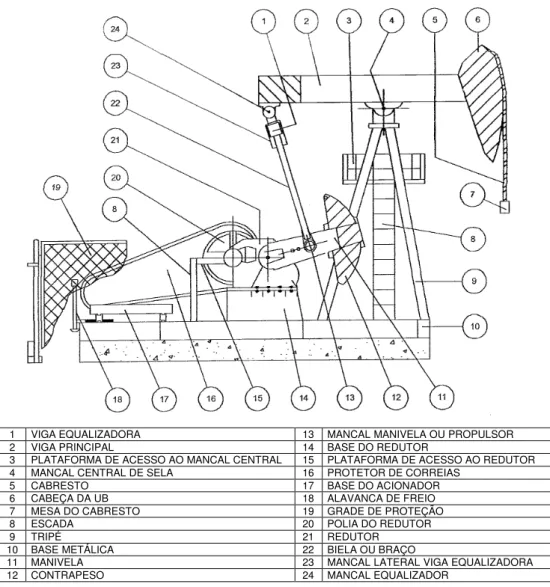
A unidade de bombeio converte o movimento de rotação do motor em movimento al-ternado requerido pela haste polida, ao mesmo tempo em que a caixa de redução reduz a velo-cidade de rotação do motor para velovelo-cidades de bombeio fisicamente possíveis. A Figura 3.12 exibe uma unidade de bombeio.
A unidade de bombeio geralmente é instalada sobre uma base de concreto ou sobre perfis de aço. A base permite o alinhamento dos componentes da unidade, principalmente, o tripé, a caixa de redução e o motor. O tripé (sampson post) pode ter três ou quatro pernas e deve suportar grandes cargas na haste polida. O mancal de sela, logo acima do tripé, é o ponto pivô para a viga, ou seja, o movimento da viga é em torno deste eixo.
As manivelas estão localizadas nos dois lados da caixa de redução e giram a baixas ve-locidades, transmitindo através das bielas o movimento para a viga. A distância do eixo da manivela ao mancal da biela ou mancal de cauda define o curso da haste polida. Este curso pode ser modificado em função da posição de fixação da biela [3].
Os contrapesos (counterweights) estão fixados nas manivelas, tendo como função ba-lancear a unidade de bombeio, minimizando-se esforços no motor. No curso ascendente o motor é bastante solicitado para elevar os fluidos acima do pistão. Já no curso descendente, a força da gravidade é responsável pelo movimento das hastes. Assim, o motor funcionaria de forma cíclica, o que prejudica sua vida útil. A fim de minimizar este tipo de problema são utilizados os contrapesos na manivela ou na viga.
1 VIGA EQUALIZADORA 13 MANCAL MANIVELA OU PROPULSOR
2 VIGA PRINCIPAL 14 BASE DO REDUTOR
3 PLATAFORMA DE ACESSO AO MANCAL CENTRAL 15 PLATAFORMA DE ACESSO AO REDUTOR
4 MANCAL CENTRAL DE SELA 16 PROTETOR DE CORREIAS
5 CABRESTO 17 BASE DO ACIONADOR
6 CABEÇA DA UB 18 ALAVANCA DE FREIO
7 MESA DO CABRESTO 19 GRADE DE PROTEÇÃO
8 ESCADA 20 POLIA DO REDUTOR
9 TRIPÉ 21 REDUTOR
10 BASE METÁLICA 22 BIELA OU BRAÇO
11 MANIVELA 23 MANCAL LATERAL VIGA EQUALIZADORA
12 CONTRAPESO 24 MANCAL EQUALIZADOR
Figura 3.12 Unidade de bombeio.
encon-46 tradas quatro tipos de unidades de bombeio. O modelo convencional, o balanceado a ar (air balanced), o Mark II e o Torqmaster.
O modelo convencional é o mais conhecido e popular tipo de unidade de bombeio. Es-te tipo de unidade funciona com duas manivelas conectadas a biela, que transmiEs-te o movimen-to para a viga.
O modelo balanceado à ar foi desenvolvido a partir dos modelos convencionais e fun-ciona com apenas uma manivela. A vantagem deste modelo em relação ao convenfun-cional é que a geometria convencional provoca uma carga máxima de aceleração no fim do curso descen-dente e início do curso ascendescen-dente, no instante em que a carga é transferida da coluna de pro-dução para as hastes. Já no tipo balanceado à ar, a aceleração ocorre no fim do curso ascen-dente. Entretanto, o modelo à ar exige freqüentes manutenções [9].
O modelo Mark II possui geometria similar ao modelo citado anteriormente. Entretan-to, o seu balanceado é feito na manivela e a barra equalizadora está mais próxima da cabeça da unidade de bombeio [9].
O modelo Torqmaster surgiu a partir da análise das vantagens e desvantagens dos ou-tros modelos, tentando combinar o que há de melhor. Umas das características deste modelo é o fato de que os contrapesos não estão em fase com a manivela, diferentemente do modelo convencional.
A seleção de unidades de bombeio está relacionada ao conhecimento de alguns parâ-metros operacionais, tais como: o curso máximo na haste polida; carga máxima na viga e o torque máximo na caixa de redução [12]. O código de designação das unidades de bombeio se inicia com as respectivas letras:
? B = Convencional com a viga balanceada; ? C = Convencional com a manivela balanceada; ? A = Balanceada a ar;
? M = Mark II;
? TM = Geometria Torqmaster.
3.1.5.1 Cinemática da Unidade de Bombeio Tipo Convencional
A abordagem mais simples para obter o movimento da coluna de hastes é trata-lo co-mo um co-movimento harmônico simples. O co-movimento das hastes S neste caso é descrito em função do ângulo da manivela ? com a vertical, a equação correspondente é:
?
??
? 1 cos
2 )
( ? S ?
S
Uma outra abordagem para o movimento da coluna de hastes é a aproximação com série de Fourier, truncada em seis termos. Esta idéia foi proposta por Laine et al, 1989. Neste caso, o movimento da haste polida é descrito pela equação 3.9 [8].
? ?
? ??? ? ? ? ? ? ? ???6 cos 1
cos 6
sen 1
sen 6 1 6
1 0
? ?
? ?
? S C A A B A
S ? ?
O valor C0, para unidades convencionais é 0,5314016. Os coeficientes Ai e Bi também são fornecidos em função da geometria da UB, No caso de Unidades de Bombeio convencio-nais a literatura sugere [8]:
I Ai Bi
1 0.0078489 0.4973054
2 0.0123680 0.0630766
3 -0.0178800 0.0071585
4 -0.0025050 0.0014288
5 -0.0005550 -0.0008320
6 -0.0001230 -0.0000700
Tabela 3-2 Coeficientes de Fourier para uma geometria de unidade de bombeio convencional.
O modelo mais preciso para o movimento da coluna de hastes está presente na norma API SPEC 11E, que descreve as práticas para o cálculo do fator de torque e do movimento da coluna de hastes em função do ângulo da manivela [12]. A Figura 3.13 mostra as principais variáveis geométricas relevantes ao cálculo.
(3.8)
48
Figura 3.13 Geometria da unidade de bombeio convencional
A partir das variáveis A, C, P, K, I e R (vide Figura 3.13), é possível calcular o deslo-camento da haste polida em função de ?, segundo as seguintes expressões:
? ? ? ? ? ? ? ? K I 1 sen ?
Usando a lei dos cossenos é fácil obter:
) cos( 2
2 2
2 ? R ? K ? RK ? ??
J ? cos 2 2 2
2 P C PC
J ? ? ? No cálculo de ? usa-se:
? ? ? ? ? ? ? ? ? ? ? ? ? PC KR R K C P 2 ) cos( 2
cos 1 ? ?
?
O ângulo ? bcorresponde a posição mais baixa da cabeça. Para encontra-lo usa-se:
? ? ? ? ? ? ? ? ? ? ? CK R P K C b 2 ) ( cos 2 2 2 1 ?
Já o ângulo ? t corresponde a posição mais alta da cabeça. A equação correspondente é: ? ? ? ? ? ? ? ? ? ? ? CK R P K C t 2 ) (
cos 1 2 2 2
O movimento das hastes é então descrito por:
?
b t?
A S ? ? ??
O ângulo ? pode ser encontrado em função de ?.
?
?
J R J
P ? ? ?
? ?sen?1 sen ?sen?1 sen ?
O movimento das hastes em função de ? é dado por:
?
? ???
? A b
S
A velocidade da haste polida é obtida através da derivada do movimento S em função do tempo. O cálculo da velocidade é importante, pois a partir da velocidade é possível calcu-lar a potência instantânea.
? ?
? ?
dt d d ds
v ?
? ?
? ?
A velocidade, através do movimento harmônico, da coluna de hastes é dada por:
? ?
2 sen? ?
? S
v ?
Considerando a aproximação por série de Fourier, temos:
? ?
? ? S?
A1cos? A6cos6? B1sen? B6sen6??
v ? ?? ? ? ?? ?
A velocidade para o modelo na norma API SPEC 11E é descrita por:
? ? ?
sen sen
C RA v?
A Figura 3.14 exibe um gráfico com três curvas de movimento da haste polida, para uma unidade de bombeio convencional tipo C 57-109-48. Percebe-se com esta figura, uma leve diferença entre os métodos de cálculo, verificando-se que o modelo através da série de Fourier é mais próximo do modelo da norma API SPEC 11E.
Figura 3.14 Movimento da haste polida.
(3.17)
(3.18)
(3.19)
(3.20)
(3.21)
50 A Figura 3.15 apresenta um gráfico com as curvas de velocidade e aceleração para os três modelos citados, usando dados da mesma unidade de bombeio do gráfico acima. Neste gráfico percebe-se como o modelo harmônico comparado ao modelo exato e ao modelo por Fourier é impreciso.
Figura 3.15 Velocidade e aceleração da haste polida.
O fator de torque ft, por definição, é uma variável que multiplicada pela carga na haste polida, resulta no torque no eixo de saída do redutor. No modelo harmônico simples temos:
2 sen? S
ft ?
para o modelo usando a série de Fourier, tem-se:
?
A1cos? A6cos6? B1sen? B6sen6??
Sft ? ?? ? ? ?? ?
A norma API SPEC 11E define o fator de torque a partir da seguinte equação:
? ?
sen sen
C RA ft ?
A Figura 3.16 é um gráfico com as curvas para o fator de torque nos três modelos. (3.23)
(3.24)
Figura 3.16 Curvas de fator de torque.
A curva de torque versus o ângulo da manivela é especificada na norma API SPEC 11E, em seu apêndice B. O procedimento para obter a curva de torque líquido, obedece a se-guinte equação:
?
F B?
Msen?f
TN ? t s ? ?
sendo Fs a carga nas hastes, B o desbalanceio estrutural da unidade e M o momento máximo dos contrapesos. Nesta equação encontram-se: o torque devido a carga nas hastes ft
?
Fs ? B?
eo torque devido aos contrapesos Msen? . O valor de M é encontrado por [8]:
? ? ? ?
?
?
?
? 4
1
i cp cp m m i x i
M M
sendo Mm o torque da manivela sem contrapesos, mcp a massa de cada contrapeso e xcp a dis-tância do centro de massa do contrapeso até o eixo de saída do redutor.
A Figura 3.17 mostra um gráfico com as curvas de torque devido à carga nas hastes, o torque devido aos contrapesos e o torque líquido. Nesta figura observa-se a diferença de tor-que no curso ascendente e no curso descendente, ou seja, um caso típico de necessidade de balanceamento.
(3.26)