C ˆAMPUS DE PRESIDENTE PRUDENTE
FACULDADE DE CIˆENCIAS E TECNOLOGIA
Programa de P´os-Gradua¸c˜ao em Ciˆencias Cartogr´aficas
Bruno C´
esar Vani
An´
alise da Cintila¸
c˜
ao Ionosf´
erica no Brasil
empregando GNSS e T´
ecnicas de Minera¸
c˜
ao e
Visualiza¸
c˜
ao de Dados
DISSERTA ¸C ˜AO
Presidente Prudente
An´
alise da Cintila¸
c˜
ao Ionosf´
erica no Brasil
empregando GNSS e T´
ecnicas de
Minera¸
c˜
ao e Visualiza¸
c˜
ao de Dados
Disserta¸c˜ao apresentada ao Programa de P´os-Gradua¸c˜ao em Ciˆencias Cartogr´aficas da Universidade Estadual Paulista “J´ulio de Mesquita Filho”, Campus de Presidente Pru-dente, para obten¸c˜ao do t´ıtulo de Mestre em Ciˆencias Cartogr´aficas.
Orientador:
Prof. Dr. Milton Hirokazu Shimabukuro
Co-orientador:
Prof. Dr. Jo˜ao Francisco Galera Monico
Presidente Prudente
Bruno C´esar Vani
Nascimento: 14/08/1987 em Regente Feij´o/SP.
Filia¸c˜ao: Jorge Henrique Vani e Lucimar Santana Vani
2006-2011: Curso de Gradua¸c˜ao
Bacharelado em Ciˆencia da Computa¸c˜ao Faculdade de Ciˆencias e Tecnologia - UNESP
2012: Curso de P´os-Gradua¸c˜ao
Agrade¸co primeiramente a Deus, pela oportunidade.
Ao orientador Prof. Dr. Milton Hirokazu Shimabukuro e ao co-orientador Prof. Dr. Jo˜ao Francisco Galera Monico, pela confian¸ca e incentivo.
Aos amigos do Programa de P´os-Gradua¸c˜ao em Ciˆencias Cartogr´aficas.
A todos os funcion´arios e colaboradores da FCT/UNESP.
`
Cintila¸c˜oes ionosf´ericas s˜ao r´apidas varia¸c˜oes na amplitude e/ou fase de um sinal de r´adio ao se propagar por irregularidades na densidade de el´etrons na ionosfera. Este fenˆomeno prejudica a acur´acia dos Sistemas Globais de Navega¸c˜ao por Sat´elite (Global Navigation Satellite Systems - GNSS), j´a que podem acarretar, dentre outros aspectos, que o receptor perca a sintonia com um ou mais sat´elites durante o rastreio do sinal. A ocorrˆencia e a intensidade de cintila¸c˜oes ionosf´ericas variam de acordo com v´arios fatores, tais como a atividade solar, ´epoca do ano, regi˜ao no globo terrestre e hor´ario local. Em per´ıodos de m´axima atividade solar, os efeitos da cintila¸c˜ao ionosf´erica s˜ao ainda mais intensos, principalmente em regi˜oes equatoriais como o Brasil. Esta¸c˜oes GNSS de moni-toramento cont´ınuo da ionosfera foram instaladas no territ´orio brasileiro desde fevereiro de 2011 atrav´es de projetos que contam com a coopera¸c˜ao de diversas institui¸c˜oes da Eu-ropa e do Brasil, dentre as quais est´a inserida a Faculdade de Ciˆencias e Tecnologia (FCT) da Universidade Estadual Paulista J´ulio de Mesquita Filho (UNESP). Estas esta¸c˜oes con-tam com receptores capazes de fornecer ´ındices de cintila¸c˜ao ionosf´erica e m´etricas sobre os sinais recebidos, os quais s˜ao denominados Ionospheric Scintillation Monitor Recei-vers (ISMR). Com a infraestrutura de monitoramento dispon´ıvel, mais de dez milh˜oes de observa¸c˜oes de monitoramento s˜ao obtidas diariamente. Extrair informa¸c˜oes relevantes em meio a esta grande quantidade de dados pode-se tornar um processo ´arduo. Neste contexto, nesta pesquisa foi investigado o uso de t´ecnicas de minera¸c˜ao e visualiza¸c˜ao de dados visando estender as possibilidades de an´alise do comportamento da cintila¸c˜ao ionosf´erica no Brasil, al´em de seus efeitos no posicionamento GNSS. Uma ferramenta para explora¸c˜ao e an´alise dos dados – denominada ISMR Query Tool – foi desenvolvida utili-zando estas t´ecnicas. Tal ferramenta foi disponibilizada `a comunidade cient´ıfica atrav´es da Internet, constituindo uma infraestrutura de an´alise que complementa a infraestrutura de monitoramento. Nesta disserta¸c˜ao, s˜ao apresentadas as caracter´ısticas e potencialida-des das t´ecnicas implementadas, bem como experimentos e an´alises dos resultados pela aplica¸c˜ao das mesmas, os quais contribu´ıram na an´alise do comportamento e na avalia¸c˜ao dos impactos da cintila¸c˜ao ionosf´erica no Brasil. S˜ao avaliados aspectos como as varia-¸c˜oes espaciais, temporais e caracter´ısticas peculiares das cintilavaria-¸c˜oes, bem como os efeitos causados no posicionamento GNSS.
Ionospheric scintillations are rapid variations on amplitude and/or phase of a radio signal as it passes through irregularities on electron density on the ionosphere. This phenomenum decrease the accuracy of Global Navigation Satellite Systems (GNSS) once can lead to, among other aspects, that receiver lose the lock of one or more satellites during signal tracking. The occurence and intensity of ionospheric scintillations change according to several factors like solar activity, epoch in the year, geographic location and local time. During high solar activity the effects are more intense mainly at equatorial regions like Brazil. GNSS monitoring stations were deployed on Brazilian territory since February 2011 through projects of cooperation of several institutions of Europe and Bra-zil, among is inserted the Faculdade de Ciˆencias e Tecnologia (FCT) da Universidade Estadual Paulista J´ulio de Mesquita Filho (UNESP). Receivers installed at these stati-ons provide scintillation indexes and signal metrics for each satellite tracked, so called Ionospheric Scintillation Monitor Receivers (ISMR). With the monitoring infrastructure, more than ten million monitoring observations are obtained daily. Extract relevant infor-mation in this big amount of data can be a hard process. In this context, this research investigated the usage of data mining and data visualization techniques in order to extend the possibilities of analyzing the scintillations in Brazil and its effects on GNSS positi-oning. A software for data exploration and analysis – named ISMR Query Tool – was developed by using these techniques. This software was available to scientific community through Internet, constituting an analysis infrastructure that complements the monito-ring infrastructure. On this master thesis, the main features and potential applications of the implemented techniques, as well as experiments and analysis by its applications are presented, which contribute on the analysis and evaluation of the impact of scintillations in Brazil. General aspects are evaluated, like variation on time and space and peculiar features of scintillations, as well as effects on GNSS positioning.
1 Configura¸c˜ao b´asica dos Sat´elites GPS. Fonte: Seeber (2003, p. 211). . . p. 23
2 Princ´ıpio b´asico do posicionamento com GPS. Fonte: Seeber (2003, p 211). p. 24
3 Fotoioniza¸c˜ao. Fonte: Dal Poz (2010). . . p. 32
4 Divis˜ao da Ionosfera em Camadas. Fonte: Dal Poz (2010). . . p. 33
5 Manchas solares nos ´ultimos 400 anos. Adaptado de Rohde (2012). . . . p. 36
6 Sunspot Number e Fluxo Solar. Fonte: National Oceanic and
Atmosphe-ric Administration (NOAA) - Space Weather Prediction Center (2014). . p. 37
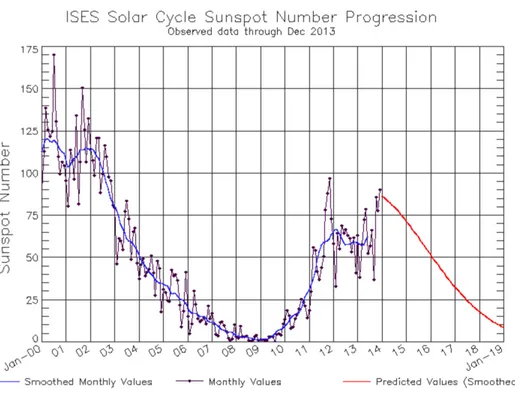
7 Sunspot Number observado e predito. Fonte: National Aeronautics and
Space Administration (NASA) (2014). . . p. 38
8 Varia¸c˜ao dos p´olos magn´etico e geomagn´etico no hemisf´erio Norte.
Adap-tada de World Data Center for Geomagnetism, Kyoto (2014). . . p. 40
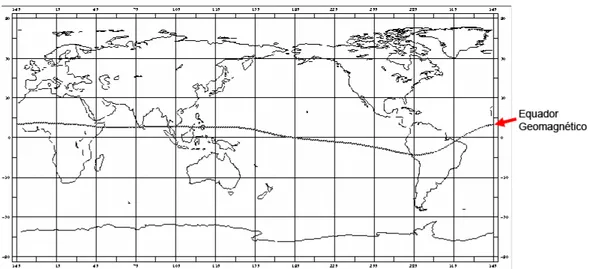
9 Equador geomagn´etico para o ano de referˆencia de 2010. Adaptada de
World Data Center for Geomagnetism, Kyoto (2014). . . p. 40
10 Esquematiza¸c˜ao da cintila¸c˜ao nos sinais GNSS. Adaptado de Walter et
al. (2010). . . p. 43
11 Frequˆencia de ocorrˆencia de cintila¸c˜ao de acordo com a localiza¸c˜ao
geo-gr´afica. Adaptada de Kintner Jr., Humphreys e Hinks (2009). . . p. 44
Fonte: Conker et al. (2003). . . p. 48
14 Esta¸c˜oes da Rede CANGIM. Fonte: Skone et al. (2005). . . p. 52
15 Exemplo de mapa disponibilizado pelo Projeto SCINTEC. Fonte:
Insti-tuto Nacional de Pesquisas Espaciais (INPE) (2009). . . p. 53
16 Esta¸c˜oes da Rede CIGALA/CALIBRA. Fonte: Universidade Estadual
Paulista - Campus Presidente Prudente (2013). . . p. 54
17 Fluxo di´ario atual das esta¸c˜oes da Rede CIGALA/CALIBRA. . . p. 56
18 Exemplo do WBMod. Fonte: NorthWest Research Associates, Inc. (NWRA) (2011). . . p. 57
19 Exemplos do GISM. Fonte: IEEA - Theoretical Studies in
Electromag-netism (2010). . . p. 59
20 Esta¸c˜ao de monitoramento utilizada para a inferˆencia dos parˆametros de
atividade da ionosfera. Fonte: Mendon¸ca, Monico e Motoki (2012). . . . p. 63
21 ´Indice S4, erro nas componentes Leste (E), Norte (N) e Vertical (H) em
RTK. Fonte: Mendon¸ca, Monico e Motoki (2012). . . p. 64
22 Cintila¸c˜ao observada e erros obtidos em PPP. Fonte: Silva, Monico e
Marques (2012). . . p. 65
23 Compara¸c˜ao entre um disquete e um cart˜ao Micro SD. . . p. 66
24 Quatro conjuntos de dados com caracter´ısticas divergentes, mas com
pro-priedades estat´ısticas idˆenticas. Adaptado de Croarkin e Tobias (2012). . p. 67
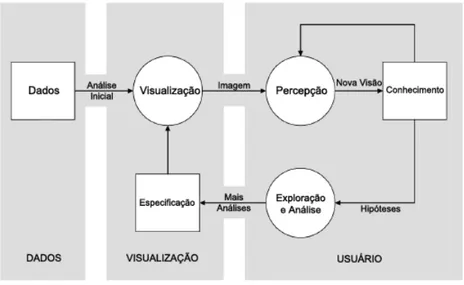
25 Processo de Visualiza¸c˜ao. Adaptado de Ware (2012, p. 4). . . p. 70
26 Escopo da Anal´ıtica Visual. Adaptado de Keim et al. (2008b, p. 4). . . . p. 72
27 Ciclo do Processo Anal´ıtico-Visual. Traduzido de Keim et al. (2008a,
p. 165). . . p. 72
28 Escopo da Minera¸c˜ao de Dados. Traduzido de Han e Kamber (2006, p. 29). p. 73
29 Processo KDD incluindo a Minera¸c˜ao de Dados. Adaptado de Han e
Han e Kamber (2006, p. 8). . . p. 75
31 Representa¸c˜ao temporal atrav´es de gr´aficos de dispers˜ao. Fonte:
Rei-mann et al. (2008). . . p. 78
32 Tentativa de representa¸c˜ao de diversas s´eries na tela. Adaptada de Few
(2008) e Ward, Grinstein e Keim (2010). . . p. 79
33 Forma¸c˜ao dos horizon charts. Adaptada de Few (2008). . . p. 80
34 Forma¸c˜ao dos horizon charts. Adaptada de Bostock (2012). . . p. 80
35 Representa¸c˜ao de v´arias s´eries temporais com horizon charts. Fonte:
Bostock (2012). . . p. 81
36 Representa¸c˜ao espa¸co-temporal com mapas epixel-based. Fonte:
Shima-bukuro et al. (2004). . . p. 82
37 Calendar view representando a quantidade de funcion´arios dentro de uma
empresa. Fonte: Wijk e Selow (1999). . . p. 82
38 Redu¸c˜ao de dimensionalidade com a t´ecnica PAA. Adaptada de Lin et
al. (2003). . . p. 83
39 Convers˜ao de uma s´erie temporal em uma representa¸c˜ao simb´olica com
SAX. Fonte: Lin et al. (2004). . . p. 84
40 Aplica¸c˜ao de janelas deslizantes. Fonte: Lin et al. (2003). . . p. 84
41 Visualiza¸c˜ao da representa¸c˜ao SAX utilizando ´arvore. Fonte: Lin et al.
(2004). . . p. 85
42 Fluxo l´ogico dos dados. . . p. 88
43 Exemplo de interface baseada em filtros da ISMR Query Tool. . . p. 89
44 Ciclo anal´ıtico-visual com visualiza¸c˜ao de s´eries temporais. . . p. 91
45 Compara¸c˜oes de ´ındices observados por diferentes esta¸c˜oes. . . p. 92
46 Identifica¸c˜ao dos hor´arios mais afetados pela cintila¸c˜ao em Mar¸co/2013. . p. 93
47 Visualiza¸c˜ao do ´ındice S4 baseada em grids. . . p. 94
48 Visualiza¸c˜ao da m´edia do ´ındice S4 para cada dia e hora do dia (UTC)
50 Visualiza¸c˜ao de seis atributos para dois sat´elites atrav´es doshorizon-charts. p. 96
51 Exemplo de vis˜ao de calend´ario. . . p. 96
52 Visualiza¸c˜ao dos resultados da t´ecnica SAX. . . p. 98
53 Intera¸c˜ao com os resultados da t´ecnica SAX. . . p. 99
54 ´Indice S4 e resultante do erro posicional para um dia sem picos de cintila¸c˜ao.p. 102
55 ´Indice S4 e resultante do erro posicional para um dia com picos de cintila¸c˜ao.p. 103
56 M´edia di´aria do ´ındice S4 - todas as esta¸c˜oes. . . p. 105
57 Desvio-padr˜ao do ´ındice S4 nos pierce points (m´ascara de eleva¸c˜ao de 20o
; grid com resolu¸c˜ao de 1o
; dados GPS do mˆes de Outubro de 2012). . p. 106
58 Desvio-padr˜ao do ´ındice S4 nos pierce points (m´ascara de eleva¸c˜ao de 20o
; grid com resolu¸c˜ao de 1o
; dados GPS do mˆes de Dezembro de 2013). p. 106
59 Hor´arios mais afetados no mˆes de Outubro de 2012. . . p. 107
60 Esta¸c˜ao PRU2 - varia¸c˜ao dos hor´arios mais afetados pela cintila¸c˜ao na ´
ultima quinzena do mˆes de Outubro de 2012. . . p. 108
61 M´edia di´aria do ´ındice S4 - esta¸c˜ao PALM. . . p. 109
62 M´edia di´aria do ´ındice S4 - esta¸c˜ao PRU2. . . p. 109
63 M´edia di´aria do ´ındice S4 - esta¸c˜ao POAL. . . p. 110
64 Porcentagem mensal de cintila¸c˜oes moderadas a fortes (S4 > 0.3) -
Es-ta¸c˜oes PALM e PRU2. . . p. 111
65 Comportamento dos picos de ´ındice S4 para a esta¸c˜ao PRU1. . . p. 113
66 Porcentagem de cintila¸c˜oes moderadas e fortes. Compara¸c˜ao entre GPS,
GLONASS e Galileo. . . p. 115
67 Porcentagem m´edia de cintila¸c˜ao moderada e alta para cada sat´elite GPS
na frequˆencia de transmiss˜ao L1, esta¸c˜ao PRU1, ano de 2013. . . p. 116
68 Hor´arios de rastreio do sat´elite GPS PRN 17 em diferentes ´epocas. . . p. 118
69 Porcentagem m´edia de cintila¸c˜ao moderada e alta para cada sat´elite
ano de 2013. . . p. 120
71 Porcentagem de cintila¸c˜oes moderadas e fortes considerando apenas
sa-t´elites GPS do bloco II-F na esta¸c˜ao PRU1, ano de 2013. . . p. 120
72 Identifica¸c˜ao de multicaminho na esta¸c˜ao MAN2. . . p. 121
73 Comparativo entre as esta¸c˜oes MAN2 e PRU2. . . p. 122
74 Esta¸c˜ao MAN2 ap´os a filtragem no parˆametro sigma ccd. . . p. 123
75 Trajet´oria da solu¸c˜ao posicional. . . p. 125
76 ´Indice S4 obtido na semana. . . p. 125
77 Erros posicionais no processamento original e no processamento modificado.p. 126
78 Representa¸c˜ao de c´ırculos com raios proporcionais ao desvio-padr˜ao
re-sultante – Modo PPS, dia 14/11/2013 12:00 UTC. . . p. 128
CALIBRA Countering GNSS high Accuracy applications Limitations due to
Ionosphe-ric disturbances in BRAzil. . . 53
CANGIM Canadian GPS Network for Ionospheric Monitoring. . . 51
CGM Corrected GeoMagnetic. . . 39
CIGALA Concept for Ionospheric Scintillation Mitigation for Professional GNSS in Latin America. . . 53
DGPS Differential GPS. . . 29
DGRF/IGRF Definite/International Geomagnetic Reference Field. . . 39
EDA Exploratory Data Analysis. . . 66
ESA European Space Agency. . . 22
EUV Extreme Ultraviolet. . . 31
FCT Faculdade de Ciˆencias e Tecnologia . . . 20
GBAS Ground Based Augmentation System. . . 23
GEGE Grupo de Estudos em Geod´esia Espacial . . . 20
GISM Global Ionospheric Scintillation Model. . . 58
GLONASS GLObal’naya NAvigatsionnaya Sputnikkovaya Sistema . . . 22
IGS International GNSS Service. . . 24
ISMR Ionospheric Scintillation Monitor Receiver. . . 55
KDD Knowledge Discovery from Data . . . 73
NASA National Aeronautics and Space Administration. . . 38
NOAA National Oceanic and Atmospheric Administration. . . 34
NWRA Northwest Research Associates, Inc.. . . 56
PAA Piecewise Aggregation Approximation. . . 83
PPP Posicionamento por Ponto Preciso. . . .19
PPS Posicionamento por Ponto Simples . . . 19
RAIM Receiver Autonomous Integrity Monitoring. . . 60
RBMC Rede Brasileira de Monitoramento Cont´ınuo dos Sistemas GNSS . . . 124
RTK Real Time Kinematic. . . 29
SAX Symbolic Aggregation Approximation. . . 83
SBAS Space-Based Augmentation System. . . 23
SGBD Sistema Gerenciador de Banco de Dados . . . 87
SNR Signal to Noise Ratio. . . 26
SSN Sunspot Number . . . 34
TEC Total Electron Content. . . .41
TECU TEC-Unit . . . 41
1 Introdu¸c˜ao p. 18 1.1 Objetivos . . . p. 19
1.2 Justificativa . . . p. 20
1.3 Organiza¸c˜ao do Documento . . . p. 20
2 Sistemas Globais de Navega¸c˜ao por Sat´elite (GNSS) p. 22 2.1 Introdu¸c˜ao . . . p. 22
2.1.1 Global Positioning System (GPS) . . . p. 23
2.2 Observ´aveis GNSS e Efeitos Sistem´aticos . . . p. 26
2.3 M´etodos de Posicionamento GNSS . . . p. 29
3 Ionosfera e Cintila¸c˜ao Ionosf´erica p. 31
3.1 Ionosfera . . . p. 31
3.1.1 Divis˜ao em Camadas . . . p. 32
3.1.2 Influˆencia da Atividade Solar na Ionosfera . . . p. 33
3.1.2.1 Ciclo Solar . . . p. 35
3.1.2.2 Intera¸c˜ao Solar-Terrestre . . . p. 38
3.4 Cintila¸c˜ao Ionosf´erica . . . p. 42
3.5 Estimativas de cintila¸c˜ao . . . p. 45
3.5.1 Cintila¸c˜oes de Amplitude e ´Indice S4 . . . p. 46
3.5.2 Cintila¸c˜oes de Fase e ´ındice Sigma-fi . . . p. 49
3.6 Redes GNSS de Monitoramento Cont´ınuo da Ionosfera . . . p. 51
3.6.1 Canadian GPS Network for Ionospheric Monitoring
(CANGIM) . . . p. 51
3.6.2 Projeto SCINTEC . . . p. 52
3.6.3 Rede CIGALA/CALIBRA . . . p. 53
3.7 Modelos de Cintila¸c˜ao Ionosf´erica . . . p. 56
3.7.1 WideBand MODel (WBMOD) . . . p. 56
3.7.2 Global Ionospheric Scintillation Model (GISM) . . . p. 58
4 Influˆencia da Cintila¸c˜ao Ionosf´erica no Posicionamento GNSS p. 60 4.0.3 Influˆencia no Posicionamento Relativo . . . p. 62
4.0.4 Influˆencia no Posicionamento por Ponto Preciso (PPP) . . . p. 63
5 Visualiza¸c˜ao e Minera¸c˜ao de Dados p. 66
5.1 Visualiza¸c˜ao de Dados . . . p. 68
5.1.1 O conceito de Visual Analytics . . . p. 71
5.2 Minera¸c˜ao de Dados (Data Mining) . . . p. 73
5.2.1 Funcionalidades da Minera¸c˜ao de Dados . . . p. 75
5.3 T´ecnicas de Minera¸c˜ao e Visualiza¸c˜ao de Dados . . . p. 77
6 Concep¸c˜ao e desenvolvimento de uma ferramenta para minera¸c˜ao e
visualiza¸c˜ao de dados: ISMR Query Tool p. 86
Minera¸c˜ao . . . p. 88
6.1.1.1 S´ıntese dos Recursos de Minera¸c˜ao e Visualiza¸c˜ao
Im-plementados . . . p. 99
6.2 Inclus˜ao do erro posicional como atributo na base de dados . . . p. 100
7 Experimentos e An´alises dos Resultados p. 104
7.1 Varia¸c˜oes temporais e espaciais . . . p. 104
7.2 Compara¸c˜oes envolvendo Constela¸c˜oes, Sat´elites, ´Indices e Frequˆencias . p. 114
7.2.1 Compara¸c˜ao entre GPS, GLONASS e Galileo . . . p. 114
7.2.2 Compara¸c˜ao entre os ´Indices S4 Total e S4 Corrigido . . . p. 119
7.2.3 Compara¸c˜ao entre Frequˆencias (L1, L2 e L5) . . . p. 120
7.3 Avalia¸c˜ao em rela¸c˜ao ao Multicaminho . . . p. 121
7.4 Experimento para mitiga¸c˜ao dos efeitos da cintila¸c˜ao ionosf´erica no PPP p. 123
7.5 Experimento no PPS . . . p. 127
8 Conclus˜ao p. 129
1
Introdu¸c˜
ao
Os Sistemas Globais de Navega¸c˜ao por Sat´elite (Global Navigation Satellite Systems – GNSS) s˜ao constitu´ıdos por constela¸c˜oes de sat´elites que permitem, atrav´es da transmiss˜ao de sinais, determinar as coordenadas da antena de um receptor.
Atualmente, pode-se destacar quatro constela¸c˜oes GNSS: a norte-americana GPS, a russa GLONASS, a europeia GALILEO e a chinesa Beidou/Compass, sendo que as duas ´
ultimas ainda est˜ao em fase de implanta¸c˜ao. Comp˜oem tamb´em o GNSS os sistemas de complemento, como os baseados em sat´elites geoestacion´arios e em esta¸c˜oes terrestres.
Estes sistemas se tornaram indispens´aveis para aplica¸c˜oes em diversas ´areas. Como exemplo, pode-se citar a agricultura de precis˜ao, na qual a tecnologia de posicionamento por sat´elite proporciona melhor qualidade e produ¸c˜ao dos campos de plantio. Pode-se, tamb´em, citar a navega¸c˜ao, que ganha cada vez mais adeptos atrav´es de sistemas GNSS embutidos em receptores port´ateis, celulares, ve´ıculos, dentre outros. Destacam-se ainda o emprego do GNSS na Meteorologia (SAPUCCI; MACHADO; MONICO, 2009), Aeronomia (MUELLA et al., 2011), dentre outras ´areas.
A qualidade do posicionamento GNSS se degrada quando ocorre a cintila¸c˜ao ionosf´e-rica, um fenˆomeno muito comum nas regi˜oes equatoriais (aproximadamente 15o
ao norte e ao sul do equador geomagn´etico (KLOBUCHAR, 1987)) e de baixas latitudes, portanto, tamb´em no Brasil.
receptores foram constitu´ıdos em fevereiro de 2011.
Considerando a configura¸c˜ao da rede, tem-se mais de 10 milh˜oes de observa¸c˜oes a cada dia: s˜ao mais de 60 parˆametros, que incluem ´ındices de cintila¸c˜ao ionosf´erica, parˆametros referentes `a ionosfera e m´etricas sobre o sinal rastreado – os quais s˜ao obtidos para cada sat´elite a cada minuto.
Cabe destacar que para o desenvolvimento de t´ecnicas de mitiga¸c˜ao de cintila¸c˜ao io-nosf´erica no posicionamento GNSS, deve-se buscar per´ıodos onde ela ocorreu, o que era dif´ıcil devido a grande quantidade de dados. Para a extra¸c˜ao de informa¸c˜oes relevan-tes em meio a este grande volume de dados, pode-se recorrer a t´ecnicas de Minera¸c˜ao e Visualiza¸c˜ao de dados oriundas da ´area de Ciˆencia da Computa¸c˜ao, explorando-se um ciclo anal´ıtico visual. A investiga¸c˜ao e uso destas t´ecnicas foram objetos de estudo desta pesquisa. Os resultados obtidos permitem a realiza¸c˜ao de diversas an´alises sobre o com-portamento das cintila¸c˜oes ionosf´ericas, podendo inclusive subsidiar o desenvolvimento de t´ecnicas de mitiga¸c˜ao dos efeitos deste fenˆomeno no posicionamento GNSS. Estas t´ecnicas foram viabilizadas atrav´es da ferramenta “ISMR Query Tool”, a qual foi desenvolvida e disponibilizada `a comunidade cient´ıfica ao longo desta pesquisa.
1.1
Objetivos
Este projeto tem por objetivo geral investigar e avaliar o uso de t´ecnicas de visuali-za¸c˜ao de dados – explorando-se o conceito emergente de Visual Analytics (KEIM et al., 2008b) – bem como t´ecnicas de minera¸c˜ao de dados para suporte `a an´alise da cintila¸c˜ao ionosf´erica no Brasil. Desta forma, explora-se a percep¸c˜ao visual humana e a capacidade de descoberta de conhecimento das t´ecnicas de minera¸c˜ao de dados, visando dar suporte ao posicionamento GNSS.
Como objetivos espec´ıficos, tem-se
• Aplica¸c˜ao de t´ecnicas de Minera¸c˜ao e Visualiza¸c˜ao de Dados – como exemplo a abor-dagem proposta pela t´ecnica SAX (LIN et al., 2003) – para an´alise das informa¸c˜oes coletadas pelas esta¸c˜oes de monitoramento de cintila¸c˜ao ionosf´erica;
1.2
Justificativa
Os efeitos causados pela cintila¸c˜ao ionosf´erica podem interferir negativamente no GNSS, acarretando em perda de acur´acia no posicionamento. Como o uso deste tipo de sistema tem aumentado continuamente, inclusive se tornando essencial para algumas atividades, como agricultura de precis˜ao e navega¸c˜ao, contribuir para a efic´acia do GNSS ´e uma maneira de colaborar indiretamente com todas estas ´areas.
Avan¸cos em tecnologias de hardware permitiram que o armazenamento de grandes quantidades de dados deixasse de ser preocupa¸c˜ao para muitas ´areas. No entanto, a possibilidade de se manter enormes quantidades de informa¸c˜oes em reposit´orios de da-dos acarreta em necessidades adicionais para analis´a-los. Neste contexto, o conceito de Anal´ıtica Visual figura como um importante aliado nos processos de tomada de decis˜ao, uma vez que compreende uma rela¸c˜ao entre as capacidades de an´alise do ser humano e a organiza¸c˜ao de uma base de dados com grande volume de informa¸c˜oes, propiciando um aumento no conhecimento sobre estes e almejando-se chegar a novas hip´oteses e conclu-s˜oes; tem-se ainda na Minera¸c˜ao de Dados a caracter´ıstica de extra¸c˜ao de conhecimento em grandes volumes de dados.
O desenvolvimento da ISMR Query Tool consiste em uma importante contribui¸c˜ao para os pesquisadores do Grupo de Estudos em Geod´esia Espacial (GEGE) da Faculdade de Ciˆencias e Tecnologia (FCT) da Universidade Estadual Paulista Julio de Mesquita Filho (UNESP), bem como para usu´arios provenientes de outras institui¸c˜oes nacionais e internacionais, uma vez que a ferramenta permite a explora¸c˜ao visual dos dados e agrega facilidade de acesso e uso atrav´es de sua interface acess´ıvel via web. Diversas pesquisas vem sendo realizadas `a partir da base de dados dispon´ıvel em diversos segmentos, como inicia¸c˜ao cient´ıfica, mestrado e doutorado.
Destaca-se que o estudo e o desenvolvimento de t´ecnicas de Minera¸c˜ao e Visualiza¸c˜ao de Dados permitem que as mesmas sejam aplicadas em diferentes contextos. Desta forma, os resultados obtidos tamb´em podem ser aplicados em outras ´areas.
1.3
Organiza¸c˜
ao do Documento
Al´em dos aspectos introdut´orios, este documento est´a organizado em mais sete Cap´ı-tulos.
destacando os princ´ıpios de funcionamento; no Cap´ıtulo 3, s˜ao destacadas as caracter´ısti-cas da ionosfera e da cintila¸c˜ao ionosf´erica; o Cap´ıtulo 4 apresenta os efeitos da cintila¸c˜ao ionosf´erica no posicionamento GNSS; e o Cap´ıtulo 5 discorre sobre a Visualiza¸c˜ao e a Minera¸c˜ao de Dados.
No Cap´ıtulo 6, a abordagem proposta neste Projeto ´e apresentada: a concep¸c˜ao e o desenvolvimento de uma ferramenta para minera¸c˜ao e visualiza¸c˜ao de dados de monito-ramento de cintila¸c˜ao – a ISMR Query Tool.
O Cap´ıtulo 7 apresenta experimentos e an´alises dos resultados obtidos pela aplica¸c˜ao das t´ecnicas de minera¸c˜ao e visualiza¸c˜ao aplicadas.
2
Sistemas Globais de Navega¸c˜
ao por Sat´
elite (GNSS)
2.1
Introdu¸c˜
ao
Os Sistemas Globais de Navega¸c˜ao por Sat´elite s˜ao constitu´ıdos por constela¸c˜oes de sat´elites que permitem, atrav´es da transmiss˜ao de sinais a um receptor, determinar as suas coordenadas. Estes sinais s˜ao transmitidos em frequˆencias espec´ıficas, e as caracter´ısticas peculiares que permitem a identifica¸c˜ao dos mesmos pelos receptores caracterizam as observ´aveis GNSS.
Atualmente, destacam-se quatro sistemas globais (GREWAL; WEILL; ANDREWS, 2007; MONICO, 2008; MARQUES, 2012):
• Global Positioning System (GPS): sistema de radionavega¸c˜ao desenvolvido pelo De-partamento de Defesa dos Estados Unidos. Desenvolvido inicialmente para fins militares, o sistema se tornou muito popular e ´util a diversos segmentos, como agri-cultura de precis˜ao e navega¸c˜ao. Foi declarado operacional em 1985;
• GLObal’naya NAvigatsionnaya Sputnikkovaya Sistema (GLONASS): sistema con-cebido na d´ecada de 1970 pela antiga Uni˜ao Sovi´etica; atualmente ´e operado pela R´ussia. Analogamente ao GPS, foi criado para fins militares, mas atualmente tam-b´em est´a dispon´ıvel para uso civil. Foi declarado operacional em 1995;
• Galileo: sistema em desenvolvimento pela European Space Agency (ESA), teve o primeiro sat´elite lan¸cado em 2005. Mais sat´elites ser˜ao lan¸cados ap´os a etapa de valida¸c˜ao do sistema;
transmitindo em trˆes frequˆencias, sendo que alguns deles permanecer˜ao em ´orbitas geoestacion´arias.
Tamb´em comp˜oem o GNSS alguns complementos ao sistema. Os sistemas de comple-mento baseados em sat´elites s˜ao denominadosSpace-Based Augmentation System (SBAS), os quais podem ser utilizados, por exemplo, para a obten¸c˜ao de corre¸c˜oes diferenciais e para avalia¸c˜ao de integridade. Outro tipo de sistema de complemento s˜ao os Ground Ba-sed Augmentation System (GBAS), os quais s˜ao similares aos SBAS mas transmitem as informa¸c˜oes a partir de esta¸c˜oes terrestres (GREWAL; WEILL; ANDREWS, 2007).
Na Subse¸c˜ao a seguir, mais detalhes s˜ao apresentados para o GPS, tecnologia mais difundida e utilizada atualmente. De uma forma geral, caracter´ısticas similares est˜ao presentes nos outros sistemas.
2.1.1
Global Positioning System (GPS)
O GPS est´a sob desenvolvimento nos Estados Unidos desde 1973, sendo inicialmente caracterizado como um sistema militar. A disposi¸c˜ao b´asica dos sat´elites GPS, que conta com 24 sat´elites, foi planejada de modo que pelo menos quatro sat´elites estejam simulta-neamente vis´ıveis acima do horizonte em qualquer lugar da Terra, 24 horas por dia. A Figura 1 apresenta esta disposi¸c˜ao, composta por seis planos orbitais que distam aproxi-madamente 20.200 km da superf´ıcie terrestre. O per´ıodo orbital ´e de 12h siderais, o que faz com que a mesma configura¸c˜ao de geometria dos sat´elites seja repetida no dia seguinte cerca de quatro minutos mais cedo em rela¸c˜ao ao tempo universal (SEEBER, 2003).
Figura 1: Configura¸c˜ao b´asica dos Sat´elites GPS. Fonte: Seeber (2003, p. 211).
coordenadas conhecidas seriam suficientes para obten¸c˜ao das coordenadas do usu´ario. No entanto, um quarto sat´elite ´e necess´ario: o GPS utiliza a comunica¸c˜ao de uma via, onde os sinais s˜ao transmitidos apenas pelos sat´elites. Para a obten¸c˜ao das distˆancias sat´elite-receptor, o tempo de percurso do sinal ´e escalado em uma distˆancia `a partir de sua velocidade. No entanto, os osciladores dos sat´elites n˜ao s˜ao sincronizados com os osci-ladores dos receptores, causando um erro sistem´atico de sincroniza¸c˜ao. A presen¸ca deste erro justifica o uso do termo pseudodistˆancia, ao inv´es de somente distˆancia (SEEBER, 2003; MONICO, 2008). Mais detalhes sobre a pseudodistˆancia s˜ao apresentados na Se¸c˜ao 2.2. Logo, o princ´ıpio b´asico de navega¸c˜ao com GPS ´e baseado em pseudodistˆancias entre o usu´ario e quatro sat´elites, conforme pode ser visto na Figura 2. `A partir de coordenadas e rel´ogios conhecidas dos sat´elites, pode-se obter as coordenadas da antena do receptor do usu´ario e o referido erro de sincroniza¸c˜ao – o qual ´e comumente denominado erro do rel´ogio do receptor.
Figura 2: Princ´ıpio b´asico do posicionamento com GPS. Fonte: Seeber (2003, p 211).
globo terrestre (SEEBER, 2003).
J´a as efem´erides precisas s˜ao obtidas atrav´es do p´os-processamento de dados, onde mais parˆametros s˜ao levados em considera¸c˜ao, como o campo gravitacional da Terra. Os centros de an´alise, como o IGS, combinam solu¸c˜oes baseadas em in´umeras esta¸c˜oes terrestres. As efem´erides precisas s˜ao uma alternativa a usu´arios que esperam maior precis˜ao, j´a que chegam a possuir acur´acia centim´etrica (SEEBER, 2003; MONICO, 2008). Atualmente, tem-se tamb´em dispon´ıveis efem´erides preditas, com as quais se pode obter posicionamento em tempo real. Destaca-se que tais efem´erides tamb´em trazem corre¸c˜oes para o erro dos rel´ogios dos sat´elites.
Atualmente, 31 sat´elites est˜ao operacionais na constela¸c˜ao GPS. Com mais sat´eli-tes dispon´ıveis em rela¸c˜ao a disposi¸c˜ao b´asica – composta por 24 sat´elisat´eli-tes – a maioria dos usu´arios disp˜oe de mais sat´elites vis´ıveis em rela¸c˜ao ao m´ınimo necess´ario de quatro sat´elites (SEEBER, 2003).
Os sat´elites GPS transmitem originalmente seus sinais simultaneamente nas frequˆen-cias L1 (1575,42 MHz) e L2 (1227,60 MHz). Com a moderniza¸c˜ao dos sat´elites, tem-se tamb´em a portadora denominada L5 (1176,45 MHz). As frequˆencias L1, L2 e L5 s˜ao ob-tidas ao multiplicar-se respectivamente a frequˆencia fundamental (f0 = 10.23 MHz) por 154, 120 e 115. Algumas gera¸c˜oes de sat´elites tem sido lan¸cadas ao longo dos anos, as quais incluem as novas frequˆencias e/ou moderniza¸c˜oes na estrutura do sinal (SEEBER, 2003; MONICO, 2008; MARQUES, 2012):
• Bloco I: primeiros sat´elites, os quais foram utilizados no desenvolvimento do sistema;
• Bloco II: primeiros sat´elites operacionais. O primeiro lan¸camento ocorreu em 1989; atualmente n˜ao se tem mais sat´elites em uso;
• Bloco IIA: os lan¸camentos ocorreram entre 1990 e 1997; atualmente ainda h´a sat´e-lites em opera¸c˜ao;
• Bloco IIR/IIR-M: substitui¸c˜ao aos sat´elites dos Blocos II e IIA; duas vers˜oes de sat´elites – cl´assico (IIR) e modernizado (IIR-M). Destaca-se os novos sinais dispo-n´ıveis no Bloco IIR-M: o c´odigo L2C na frequˆencia L2 e o novo c´odigo militar M nas frequˆencias L1 e L2;
• Bloco III (futuro): previs˜ao de lan¸camento em 2014, contendo novos sinais e auto-nomia de monitoramento de integridade dos sinais.
2.2
Observ´
aveis GNSS e Efeitos Sistem´
aticos
Para fins de posicionamento GNSS, al´em da observ´avel de pseudodistˆancia, tem-se tamb´em a observ´avel de fase da onda portadora. Destaca-se que outras observ´aveis tam-b´em podem ser obtidas, como a varia¸c˜ao Doppler e a Raz˜ao Sinal Ru´ıdo (Signal to Noise Ratio – SNR) (MONICO, 2008).
A pseudodistˆancia ´e obtida pela multiplica¸c˜ao do tempo de propaga¸c˜ao do sinal – o qual ´e obtido atrav´es da correla¸c˜ao de um c´odigo – pela velocidade da luz. Cada sat´elite GPS transmite continuamente um c´odigo, denominadopseudorandom noise(PRN – ru´ıdo pseudoaleat´orio), que nada mais ´e que uma sequˆencia bin´aria padr˜ao. Os PRN’s s˜ao designados de maneira a garantir uma baixa correla¸c˜ao entre eles. Desta forma, o receptor – que conhece as sequˆencias bin´arias de cada PRN – consegue identificar univocamente cada sat´elite emissor dos sinais (SEEBER, 2003; MONICO, 2008; MARQUES, 2012).
A medida de pseudodistˆancia n˜ao consiste, de fato, na distˆancia geom´etrica entre sat´elite e receptor. Isto se deve ao fato de que os sinais transmitidos pelos sat´elites, al´em do erro causado pelo n˜ao sincronismo do oscilador do receptor com os osciladores dos sat´elites, est˜ao sujeitos a in´umeros efeitos em sua trajet´oria de propaga¸c˜ao do sat´elite at´e a antena do receptor, tais como (GREWAL; WEILL; ANDREWS, 2007; MONICO, 2008):
• Erro do rel´ogio dos sat´elites: os osciladores de cada sat´elite, embora altamente precisos, cont´em discrepˆancias em rela¸c˜ao ao tempo GPS. Coeficientes de corre¸c˜ao s˜ao transmitidos por cada sat´elite atrav´es das efem´erides; desta forma, pode-se corrigir o erro de cada sat´elite e associ´a-los a um tempo comum a todos – o tempo GPS. Ap´os a corre¸c˜ao, o res´ıduo ´e de aproximadamente 1 ns, o que acarreta em um erro de cerca de 1 m nas medidas;
• Refra¸c˜ao ionosf´erica: refra¸c˜ao do sinal ao atravessar a camada da ionosfera (aproxi-madamente 50 a 1000 km da superf´ıcie terrestre). Trata-se de um meio dispersivo, onde a refra¸c˜ao varia conforme a frequˆencia do sinal GNSS. Mais detalhes sobre este efeito s˜ao apresentados no Cap´ıtulo 3;
superf´ı-cie terrestre at´e aproximadamente 50 km de altitude – ´e caracterizada pela presen¸ca de gases secos e vapor d’´agua, os quais podem aumentar o percurso do sinal causando erros de at´e cerca de 30 m nas distˆancias medidas. Destaca-se que, diferentemente da ionosfera, as diferentes frequˆencias dos sinais GNSS s˜ao igualmente afetadas pela troposfera: trata-se de um meio n˜ao dispersivo;
• Multicaminho: objetos localizados nas proximidades da antena do receptor podem refletir os sinais GNSS, resultando em um ou mais caminhos de propaga¸c˜ao distintos. Estes sinais distintos podem causar irregularidades na amplitude e na fase do sinal direto, causando erros nas medidas e preju´ızo no posicionamento;
• Erros orbitais: poss´ıveis erros nas coordenadas dos sat´elites – tanto nas efem´erides transmitidas, quanto nas precisas – s˜ao propagados para as coordenadas do usu´ario;
• Erros de hardware e centro de fase da antena: efeitos sistem´aticos aparecem no
hardware dos sat´elites e dos receptores, causando atraso entre as portadoras. J´a o centro de fase da antena pode divergir do centro de massa da mesma, o qual ´e utilizado como ponto de referˆencia das coordenadas;
• Efeitos geodinˆamicos: causados por intera¸c˜oes da Terra com a atmosfera e o meio in-terplanet´ario, tais como mar´es terrestres (deforma¸c˜ao da crosta da Terra em virtude das for¸cas de mar´e – sol e lua), carga oceˆanica (deslocamentos na crosta terrestre causados pelas mar´es oceˆanicas) e movimento do p´olo.
Por esta raz˜ao, a observ´avel pseudodistˆancia pode ser descrita pelo seguinte modelo matem´atico (MONICO, 2008):
P Dsr =ρ s
r+c(dtr−dts) +Trs+I s r +dm
s r+ǫ
s
r (2.1)
onde:
• P Dsr refere-se `a pseudodistˆancia (em metros) entre as antenas do sat´elite s, no
instante de transmiss˜ao, e do receptor r, no instante de recep¸c˜ao;
• c´e a velocidade da luz no v´acuo;
• dtr ´e o erro do rel´ogio do receptor no instante de recep¸c˜ao;
• Trs eIrs referem-se respectivamente aos atrasos troposf´erico e ionosf´erico;
• dmsr refere-se aos efeitos de multicaminho do sinal;
• ǫsr refere-se a outros efeitos n˜ao modelados.
Embora a pseudodistˆancia obtida pelo c´odigo seja o m´etodo mais utilizado, tal obser-v´avel tem precis˜ao na ordem de metros. Uma obserobser-v´avel muito mais precisa ´e a fase (ou fase de batimento) da onda portadora, cuja precis˜ao ´e da ordem de mil´ımetros.
A fase da onda portadora ´e obtida pela diferen¸ca entre a fase gerada pelo sat´elite no instante de transmiss˜ao do sinal e sua r´eplica gerada pelo receptor no instante de recep¸c˜ao do sinal, o que resulta em uma medida fracion´aria. Um n´umero inteiro de ciclos permanece desconhecido, o qual ´e denominado ambiguidade da fase (MONICO, 2008; MARQUES, 2012). Uma vez determinado o valor das ambiguidades, a medida de fase da onda portadora pode ser considerada uma medida de pseudodistˆancia com muito mais precis˜ao, e consequentemente, obt´em-se maior acur´acia no posicionamento baseado nesta observ´avel (TEUNISSEN; KLEUSBERG, 1998). O ru´ıdo da observ´avel de fase ap´os a solu¸c˜ao das ambiguidades ´e da ordem de cent´ımetros a mil´ımetros (COLLINS et al., 2010).
O seguinte modelo matem´atico descreve a fase da onda portadora (MONICO, 2008):
φs r =f
ρs
r+Trs−Irs+Dmsr
c
+f(dtr−dts) + [φs(t0)−φr(t0)] +Nrs+ǫsr (2.2)
onde:
• φsr ´e a fase (em ciclos);
• f ´e a frequˆencia da portadora;
• Dmsr refere-se aos efeitos de multicaminho do sinal;
• φs(t0)´e a fase inicial no sat´elite na ´epoca de referˆencia t0;
• φr(t0)´e a fase inicial no receptor na ´epoca de referˆencia t0;
• Nrs ´e a ambiguidade da fase no instante inicial de rastreio.
Os outros termos est˜ao definidos na Equa¸c˜ao 2.1. Observa-se que o termo referente `a refra¸c˜ao ionosf´erica (Is
r) na equa¸c˜ao da fase ´e negativo, ao passo que na pseudodistˆancia ´e
sobre a portadora – ´e inferior `a velocidade de fase. Desta forma, ocorre um atraso no c´odigo e um avan¸co na fase (MONICO, 2008).
A Eq. 2.2 pode ser reescrita multiplicando-se os termos pelo comprimento de onda (λ =c/f), resultando-se na medida da fase em metros (Φs
r):
Φs
r =ρsr+c(dtr−dts) +Trs−Irs+Dmrs+λ[φs(t0)−φr(t0)] +λNrs+ǫsr (2.3)
2.3
M´
etodos de Posicionamento GNSS
De uma forma geral, o conceito de posicionamento remete a determina¸c˜ao da posi¸c˜ao de um objeto em rela¸c˜ao a um referencial. Se este referencial ´e geocˆentrico, trata-se de posicionamento absoluto; se ´e um referencial materializado, trata-se de posicionamento relativo. Outro fator a destacar ´e o estado do objeto: se est´a em repouso, trata-se de posicionamento est´atico; caso esteja em movimento, tem-se o posicionamento cinem´atico (MONICO, 2008).
Ao empregar-se o GNSS para posicionamento, a presen¸ca de alguns aspectos caracte-riza cada um dos diversos m´etodos de posicionamento descritos na literatura: a observ´avel utilizada, o referencial adotado, o estado do objeto a posicionar, o tratamento dos efeitos presentes na trajet´oria do sinal do sat´elite at´e o receptor, o tipo de efem´eride utilizada, dentre outros. De uma forma geral, comparece o posicionamento absoluto, posicionamento relativo e posicionamento diferencial.
Os dois ´ultimos est˜ao relacionados `a utiliza¸c˜ao de uma esta¸c˜ao base de coordenadas conhecidas, ou seja, mais de um receptor ´e utilizado. Desta forma, torna-se poss´ıvel a realiza¸c˜ao de diferencia¸c˜oes entre observa¸c˜oes de diferentes esta¸c˜oes para a obten¸c˜ao de melhores resultados. No entanto, atualmente, o usu´ario com um simples receptor pode usufruir de infraestruturas de Redes GNSS ou Sistemas de Complemento para suprir a necessidade de receptores adicionais. Diversos m´etodos est˜ao presentes na literatura, como
Real Time Kinematic (RTK) e o Differential GPS (DGPS).
Como m´etodos de posicionamento absoluto, destacam-se o PPS e o PPP.
2008). Modelos podem ser aplicados para atenua¸c˜ao dos efeitos da ionosfera e da tropos-fera; a acur´acia fica limitada `a precis˜ao das pseudodistˆancias e das efem´erides transmitidas.
J´a o PPP ´e caracterizado pela utiliza¸c˜ao de efem´erides precisas e corre¸c˜oes precisas para os erros dos rel´ogios dos sat´elites (ZUMBERGE et al., 1997; MONICO, 2000; MO-NICO, 2008). Pode-se adotar como observ´aveis tanto a fase quanto a pseudodistˆancia, bem como combina¸c˜oes lineares para eliminar os efeitos da ionosfera. Todos os erros en-volvidos devem ser tratados para que se obtenha alta acur´acia. Por exemplo, pode-se utilizar as efem´erides precisas produzidas por algum centro, como o IGS, para se obter as coordenadas e erros dos rel´ogios dos sat´elites com maior qualidade. Tamb´em pode-se recorrer a modelos regionais de ionosfera e troposfera, os quais podem apresentar melhores resultados em rela¸c˜ao aos modelos globais. De maneira an´aloga para os demais efeitos, tais como movimento do p´olo, carga oceˆanica, centro de fase da antena, etc.
O PPP recupera o princ´ıpio do posicionamento GNSS, j´a que pressup˜oe a utiliza¸c˜ao de apenas um receptor (COLLINS et al., 2010). No entanto, os modelos utilizados para as corre¸c˜oes dos diferentes efeitos s˜ao definidos em sua maioria atrav´es de redes, muitas vezes globais. Logo, ´e poss´ıvel perceber que, embora pressuponha apenas um receptor, o PPP ´e suportado por diversas redes, envolvendo por consequˆencia, in´umeras e variadas infraestruturas.
3
Ionosfera e Cintila¸c˜
ao Ionosf´
erica
3.1
Ionosfera
No contexto do GNSS, para fins te´oricos e pr´aticos, a atmosfera terrestre ´e normal-mente dividida em duas camadas principais – troposfera e ionosfera – cada qual com diferentes influˆencias sobre os sinais (MATSUOKA, 2007). A troposfera n˜ao est´a no escopo deste trabalho.
Davies (1990) define a ionosfera como a camada superior da atmosfera na qual a ioniza¸c˜ao existente ´e suficiente para afetar a propaga¸c˜ao de ondas de r´adio. Destaca-se que o termo ionosfera foi proposto por R. A. Watson-Watt, em 1926, e n˜ao foi muito utilizado nos anos seguintes (McNAMARA, 1991).
A defini¸c˜ao da regi˜ao de abrangˆencia da ionosfera pode divergir um pouco de autor para autor, mas, de uma forma geral, define-se que a ionosfera se estende em uma regi˜ao de aproximadamente 50 a 1000 km acima da superf´ıcie terrestre, sendo dividida em algumas subcamadas que ser˜ao descritas adiante na Subse¸c˜ao 3.1.1. Sendo a ionosfera um meio de propaga¸c˜ao de sinais, torna-se poss´ıvel a abrangˆencia global de servi¸cos que utilizam esta camada como meio de comunica¸c˜ao. Neste contexto, tem-se como exemplo o GNSS.
A ionosfera ´e caracterizada pela presen¸ca de ´ıons e el´etrons livres; ambos s˜ao formados principalmente pela fotoioniza¸c˜ao (DAL POZ, 2010). Este processo ´e caracterizado pela absor¸c˜ao de radia¸c˜ao solar na faixa do extremo ultra-violeta (Extreme Ultraviolet – EUV) e raios X por ´atomos neutros da atmosfera.
um el´etron livre na atmosfera. O ´atomo neutro torna-se ent˜ao um ´ıon positivo, pois per-deu um el´etron de carga negativa. Destaca-se que s˜ao os el´etrons livres que refletem as ondas de r´adio, tornando poss´ıvel a comunica¸c˜ao por ondas de r´adio na ionosfera (Mc-NAMARA, 1991; DAL POZ, 2010). O esquema da fotoioniza¸c˜ao ´e apresentado na Figura 3.
Figura 3: Fotoioniza¸c˜ao. Fonte: Dal Poz (2010).
Outro processo que ocorre na ionosfera ´e a recombina¸c˜ao. Este processo ´e o inverso da fotoioniza¸c˜ao, ou seja, os el´etrons livres, com carga negativa, se recombinam com os ´ıons, de carga positiva, produzindo ´atomos neutros. Nas regi˜oes mais altas da ionosfera, muitos el´etrons se perdem devido `a recombina¸c˜ao. J´a nas regi˜oes mais baixas, os el´etrons se perdem devido a um processo de liga¸c˜ao ou captura (attachment), onde se juntam com os ´atomos neutros, formando ´ıons com carga negativa. Ressalta-se que tanto os ´ıons com carga positiva, tanto os ´ıons de carga negativa s˜ao mais densos que os el´etrons e n˜ao interagem com as ondas de r´adio (MCNAMARA, 1991).
Os processos de recombina¸c˜ao e liga¸c˜ao ocorrem durante todo o tempo. J´a a fotoioni-za¸c˜ao ocorre apenas durante o dia quando o sol est´a acima do horizonte. Estes processos determinam a densidade de el´etrons na ionosfera. A densidade de el´etrons ´e maior durante o dia, quando o processo de fotoioniza¸c˜ao ´e superior. Ao entardecer, este processo cessa, e a recombina¸c˜ao faz com que a densidade diminua constantemente ao longo da noite. Ao amanhecer, a quantidade de el´etrons livres ´e incrementada novamente pela fotoioniza¸c˜ao (McNAMARA, 1991). Observa-se o comportamento c´ıclico destes fenˆomenos.
3.1.1
Divis˜
ao em Camadas
densidade volum´etrica de el´etrons livres nas regi˜oes da ionosfera ´e expressa em n´umero de el´etrons por cent´ımetro c´ubico.
Figura 4: Divis˜ao da Ionosfera em Camadas. Fonte: Dal Poz (2010).
A Camada D abrange aproximadamente 50 a 90 km de altitude, e figura como uma fonte refletora de sinais de baixas freq¨uˆencias. Esta camada n˜ao acarreta em efeitos mensur´aveis nas observ´aveis GNSS (DAVIES, 1990; DAL POZ, 2010).
A Camada E abrange aproximadamente 100 km de altitude; McNamara (1991) destaca que esta camada foi a primeira a ser descoberta (a letra “E” denota “campo el´etrico”).
J´a a camada F abrange aproximadamente 150 a 1000 km. Esta camada se subdivide em F1 e F2. Observa-se que, durante a noite, a densidade de el´etrons nas camadas D, E, e F1 diminui (devido `a superioridade dos processos de recombina¸c˜ao e liga¸c˜ao em rela¸c˜ao ao processo de fotoioniza¸c˜ao). No entanto, na camada F2, observa-se uma maior variabilidade da ionosfera, o que consequentemente causa efeitos mais severos nos sinais GNSS, como as cintila¸c˜oes (DAL POZ, 2010).
3.1.2
Influˆ
encia da Atividade Solar na Ionosfera
do tempo, o sol permanece calmo, n˜ao causando efeitos significativos nas comunica¸c˜oes de r´adio de alta frequˆencia. No entanto, o sol perturbado, ainda que levemente, pode at´e interromper tal tipo de servi¸co (McNAMARA, 1991).
Ao observar-se o sol, pode-se notar a presen¸ca de pequenas manchas. Esta observa¸c˜ao pode ser feita, por exemplo, atrav´es da proje¸c˜ao de sua imagem em uma folha de pa-pel, utilizando-se um telesc´opio. Este tipo de observa¸c˜ao ´e denominadowhite light image
(imagem branca e clara). Neste tipo de observa¸c˜ao, algumas manchas escuras podem ser notadas eventualmente. Estas manchas vˆem sendo observadas h´a muito tempo. H´a regis-tros de observa¸c˜oes destas manchas por chineses no primeiro s´eculo a.C. Com a inven¸c˜ao do telesc´opio, Galileo mostrou, em 1610, que tais manchas – que s˜ao denominadas na literatura como sunspots – eram de fato da superf´ıcie do sol. Galileo tamb´em observou o comportamento c´ıclico das manchas solares, e concluiu que o sol rotacionava com um per´ıodo de aproximadamente 27 dias, em um eixo aproximadamente paralelo ao eixo de rota¸c˜ao da Terra (McNAMARA, 1991).
As manchas solares s˜ao utilizadas hoje em dia para a an´alise dos efeitos do sol na ionosfera. H´a centros de observa¸c˜ao que catalogam diariamente o n´umero de manchas solares, como o National Oceanic and Atmospheric Administration (NOAA). O n´umero de manchas solares (Sunspot Number – SSN) ´e obtido atrav´es da contagem do n´umero de grupos de manchas solares e do n´umero de manchas individuais, respeitando-se a seguinte propor¸c˜ao (McNAMARA, 1991):
SSN = 10NG+NI (3.1)
onde N G e N I referem-se respectivamente ao n´umero de grupos de manchas e ao n´umero de manchas individuais.
As manchas solares aparecem com maior frequˆencia em grupos, em regi˜oes compre-endidas a aproximadamente 30o
do equador solar. As mesmas n˜ao aparecem nos p´olos solares. Elas parecem escuras pois est˜ao compreendidas em regi˜oes mais frias – aproxi-madamente 4000o
C – enquanto as regi˜oes do entorno est˜ao a temperaturas de 6000o C (McNAMARA, 1991).
o sol. Al´em das observa¸c˜oes em comprimentos de onda muito curtos, a coroa tamb´em ´e vis´ıvel em certas circunstˆancias, como em eclipses solares (McNAMARA, 1991).
A corona contribui para o escoamento de substˆancias do sol pelo espa¸co interplane-t´ario, o que ´e conhecido como vento solar. Este fluxo ´e cont´ınuo e cont´em part´ıculas eletricamente carregadas. Logo, conclui-se que os ventos solares tamb´em s˜ao respons´aveis pela forma¸c˜ao da ionosfera (KIRCHHOFF, 1991; DAL POZ, 2010). Estes ventos carre-gam milh˜oes de toneladas de materiais solares, e sopra a uma velocidade aproximada de 400 km/s. O percurso destas part´ıculas do sol at´e a Terra ´e de aproximadamente 5 dias. N˜ao sentimos os ventos solares na superf´ıcie da Terra devido `a baixa densidade das par-t´ıculas que chegam. No entanto, modifica¸c˜oes el´etricas nestas parpar-t´ıculas afetam o campo magn´etico da Terra e a ionosfera (McNAMARA, 1991).
As explos˜oes solares (solar flares) s˜ao provocadas por um r´apido aumento de energia na superf´ıcie do sol, que, ao ser liberada, causa uma varia¸c˜ao na radia¸c˜ao solar na forma de emiss˜ao de raios ultravioleta e raios X (McNAMARA, 1991).
3.1.2.1 Ciclo Solar
Atrav´es da observa¸c˜ao das manchas solares, al´em da conclus˜ao de que o sol rota-ciona, ´e poss´ıvel observar tamb´em um comportamento c´ıclico em per´ıodos mais longos. Pode-se observar que o n´umero de manchas solares varia de 0 a 100 a cada 11 anos (apro-ximadamente). Registros destas observa¸c˜oes foram feitos desde a descoberta de Galileo (McNAMARA, 1991).
Figura 5: Manchas solares nos ´ultimos 400 anos. Adaptado de Rohde (2012).
Figura 6: Sunspot Number e Fluxo Solar. Fonte: National Oceanic and Atmospheric Administration (NOAA) - Space Weather Prediction Center (2014).
solares ´eNational Aeronautics and Space Administration (NASA). A Figura 7 apresenta um exemplo disponibilizado pela referida agˆencia, onde pode-se observar a parte observada da atividade solar juntamente com a parte predita.
Figura 7: Sunspot Number observado e predito. Fonte: National Aeronautics and Space Administration (NASA) (2014).
Estudos relacionados aos ciclos solares tˆem despertado interesse em diversas ´areas devido aos diversos efeitos que estes acarretam em tecnologias como o GNSS (DAL POZ, 2010).
3.1.2.2 Intera¸c˜ao Solar-Terrestre
No que concerne ao campo magn´etico da Terra, alguns ´ındices visam descrever a atividade geomagn´etica terrestre e suas componentes. Os ´ındices mais utilizados s˜ao o
Disturbance Storm-Time (DST), Planetarische Kennziffer ou ´ındice planet´ario (Kp) e o
do campo geomagn´etico. Estas medidas s˜ao coletadas por observat´orios distribu´ıdos na regi˜ao auroral no hemisf´erio norte (DAL POZ, 2010).
3.2
Latitude Geomagn´
etica
Enquanto a latitude geogr´afica de um ponto ´e definida com rela¸c˜ao aos p´olos geogr´a-ficos, a latitude geomagn´etica ´e definida em rela¸c˜ao aos p´olos geomagn´eticos. Os p´olos geomagn´eticos (ou dipolares) s˜ao a intersec¸c˜ao da superf´ıcie da Terra com o eixo de uma barra magn´etica hipoteticamente localizada no centro da Terra, pela qual se obt´em uma aproxima¸c˜ao do campo geomagn´etico. Desta forma, tem-se os p´olos geomagn´eticos Norte e Sul. Por sua vez, os p´olos magn´eticos s˜ao os pontos em que o campo magn´etico da Terra se torna uma linha vertical para baixo, ou seja, a inclina¸c˜ao do campo magn´etico da Terra nos p´olos magn´eticos ´e de 90o
. A Figura 8 apresenta a varia¸c˜ao dos p´olos mag-n´etico e geomagmag-n´etico ao longo do tempo, considerando-se o hemisf´erio Norte. Observa-se um suave deslocamento ao longo do tempo, o qual ´e denominado varia¸c˜ao geomagn´etica secular (WORLD DATA CENTER FOR GEOMAGNETISM, KYOTO, 2014; TAUXE et al., 2014).
As coordenadas geomagn´eticas de um ponto na superf´ıcie terrestre (ou pr´oximo a esta) podem ser definidas atrav´es de um sistema de coordenadas geomagn´eticas. Um sistema difundido e usualmente empregado na avalia¸c˜ao de fenˆomenos geof´ısicos – tais como as cintila¸c˜oes ionosf´ericas – ´e o Corrected GeoMagnetic (CGM). Tal sistema recorre a um modelo do campo magn´etico da Terra para determinar as coordenadas geomagn´eticas de um ponto de interesse (GUSTAFSSON; PAPITASHVILI; PAPITASHVILI, 1992).
Figura 8: Varia¸c˜ao dos p´olos magn´etico e geomagn´etico no hemisf´erio Norte. Adaptada de World Data Center for Geomagnetism, Kyoto (2014).
3.3
Atraso ionosf´
erico e Conte´
udo Total de El´
etrons
O erro devido `a ionosfera nas observ´aveis GNSS ´e diretamente proporcional `a quan-tidade de el´etrons presente na mesma e inversamente proporcional `a frequˆencia do sinal (DAL POZ, 2010). Para a caso do GPS na frequˆencia L1 (1575,42 MHz), a ionosfera pode retardar as ondas de r´adio em at´e 300 ns nos piores casos, causando um erro de 100 m nas distˆancias sat´elite-receptor que s˜ao medidas (KLOBUCHAR, 1987).
Destaca-se que para o c´odigo, ocorre um retardo aparente do sinal, o que faz com que aumente o comprimento aparente do caminho percorrido pelo mesmo; j´a para a fase, ocorre uma diminui¸c˜ao do comprimento aparente (LEICK, 2004; DAL POZ, 2010).
Um parˆametro importante para a determina¸c˜ao do atraso ionosf´erico ´e o conte´udo total de el´etrons (Total Electron Content – TEC). O TEC ´e uma quantidade do tipo densidade colunar e consiste no n´umero de el´etrons presente em uma coluna de 1 m2
de se¸c˜ao reta estendendo-se pela trajet´oria sat´elite-receptor. Tal parˆametro ´e relacionado a diversas vari´aveis, dentre as quais se pode destacar os parˆametros de atividade solar, ´ındices geomagn´eticos, esta¸c˜ao do ano, localiza¸c˜ao e hora do dia. O TEC ´e comumente ex-presso em unidades de TEC (TEC-Unit – TECU). Um TECU equivale a1016
el´etrons/m2 (KLOBUCHAR, 1987; MARQUES, 2012).
Os valores m´edios de atraso ionosf´erico em todo o globo terrestre s˜ao mais significativos em uma regi˜ao em torno de 15o
ao Norte e ao Sul do equador geomagn´etico. Para sat´elites com m´ınimo ˆangulo de eleva¸c˜ao projetado para o GPS (5o
), o atraso ´e aproximadamente trˆes vezes superior em rela¸c˜ao aos sat´elites no zˆenite (KLOBUCHAR, 1987).
Para usu´arios que n˜ao disponham de receptores de dupla ou de multi-frequˆencia – n˜ao podendo assim realizar diferencia¸c˜oes para diminui¸c˜ao dos efeitos da ionosfera –, uma alternativa ´e a utiliza¸c˜ao do modelo de Klobuchar (tamb´em conhecido como modelo transmitido) para atenua¸c˜ao do efeito do atraso ionosf´erico no sinal GPS. Tal modelo utiliza oito coeficientes que s˜ao transmitidos como parte das mensagens de navega¸c˜ao GPS, e proporciona uma corre¸c˜ao de aproximadamente 50% em rela¸c˜ao ao erro m´edio quadr´atico devido `a ionosfera nas distˆancias sat´elite-receptor que s˜ao medidas. O algoritmo cont´em algumas aproxima¸c˜oes que reduzem sua complexidade computacional, e ´e detalhado para a frequˆencia L1. Para o caso da frequˆencia L2, basta-se escalar o valor obtido em L1 atrav´es de uma constante (KLOBUCHAR, 1987).
uma frequˆencia, os usu´arios podem minimizar os efeitos desta camada atrav´es da realiza-¸c˜ao de combina¸c˜oes lineares entre as observ´aveis de diferentes frequˆencias. Atualmente, com a moderniza¸c˜ao do GPS, tem-se dispon´ıvel tamb´em o sinal transmitido na porta-dora denominada L5, permitindo, portanto, a realiza¸c˜ao de combina¸c˜oes lineares com trˆes frequˆencias (POLEZEL, 2010). Para a avia¸c˜ao, por´em, trata-se da segunda frequˆen-cia, uma vez que a frequˆencia L2 n˜ao vinha sendo utilizada por n˜ao estar numa banda protegida.
3.4
Cintila¸c˜
ao Ionosf´
erica
A cintila¸c˜ao ionosf´erica ´e uma r´apida mudan¸ca na fase e/ou amplitude de um sinal de r´adio `a medida em que se propaga por irregularidades (rarefa¸c˜oes do plasma) na densidade do plasma ionosf´erico (CONKER et al., 2003): tal fenˆomeno causa atenua¸c˜ao na amplitude e deslocamentos na fase dos sinais GNSS ao passarem pela ionosfera (SKONE et al., 2005), efeitos que podem degradar o posicionamento GNSS, j´a que afetam diretamente os sinais.
As irregularidades da ionosfera que causam cintila¸c˜oes (tamb´em denominadas de bo-lhas ionosf´ericas) podem variar significativamente em extens˜ao e velocidade de desloca-mento. Rezende et al. (2007) apresenta estimativas da dimens˜ao das irregularidades na regi˜ao equatorial brasileira, as quais podem chegar a cerca de 480 km na dire¸c˜ao Leste-Oeste, podendo alcan¸car uma altura plena de cerca de 1400 km. Outra caracter´ıstica destacada s˜ao as velocidades zonais (leste-oeste) com que estas se deslocam, as quais po-dem alcan¸car 50 a 150 m/s, formando “manchas” de irregularidades. As irregularidades de grande escala contˆem irregularidades de pequena escala (aproximadamente 400 m), as quais causam cintila¸c˜oes; em alguns casos, estas pequenas irregularidades apresentam um aspecto intermitente conforme o sinal de um sat´elite se propaga pelas mesmas (REZENDE et al., 2007; WALTER et al., 2010). Uma esquematiza¸c˜ao ´e apresentada na Figura 10.
Figura 10: Esquematiza¸c˜ao da cintila¸c˜ao nos sinais GNSS. Adaptado de Walter et al. (2010).
em receptores de simples, quanto em receptores de dupla frequˆencia (DATTA-BARUA et al., 2003). Para o caso do GPS e sua nova frequˆencia de transmiss˜ao (L5), tamb´em foram observadas perdas de sintonia nas esta¸c˜oes de monitoramento da Rede CIGALA/CALI-BRA.
As cintila¸c˜oes de amplitude e de fase tˆem comportamento espec´ıfico e podem ser relacionadas de regi˜ao para regi˜ao. Assim como o TEC, os efeitos variam de acordo com a frequˆencia do sinal, localiza¸c˜ao geogr´afica, hor´ario local, esta¸c˜ao do ano, atividade magn´etica e ciclos solares. Observa-se que as cintila¸c˜oes ionosf´ericas mais significativas ocorrem nas regi˜oes de proximidades de at´e 10o
a 20o
do equador geomagn´etico. Tamb´em s˜ao freq¨uentes nas regi˜oes de aurora (latitudes geomagn´eticas entre 65 e 75o
) e polares (latitudes geomagn´eticas maiores que 75o
) (WALTER et al., 2010). Destaca-se que em todas as regi˜oes os efeitos s˜ao mais significativos na ocorrˆencia de atividades solares mais intensas, e que a maioria das cintila¸c˜oes ocorre durante algumas horas ap´os o pˆor-do-sol durante os picos dos ciclos solares. Em per´ıodos de atividades solares mais baixas, o mesmo comportamento ´e esperado, mas com menor intensidade.
A Figura 11 apresenta a frequˆencia de ocorrˆencia da cintila¸c˜ao de acordo com a loca-liza¸c˜ao geogr´afica a n´ıvel global.
Observa-se duas regi˜oes mais afetadas (em vermelho) – localizadas aproximadamente entre 10o
a 20o
Figura 11: Frequˆencia de ocorrˆencia de cintila¸c˜ao de acordo com a localiza¸c˜ao geogr´afica. Adaptada de Kintner Jr., Humphreys e Hinks (2009).
anomalia equatorial. Observa-se que entre estas regi˜oes h´a uma faixa estreita com menor frequˆencia de ocorrˆencia; nesta regi˜ao encontra-se o equador geomagn´etico. Os efeitos s˜ao mais significativos na regi˜ao da anomalia equatorial em rela¸c˜ao `a regi˜ao do equador geomagn´etico devido `a ionosfera equatorial. Na ionosfera equatorial, a combina¸c˜ao dos campos el´etrico e magn´etico sobre a Terra causa o transporte de el´etrons verticalmente, os quais s˜ao difundidos para o Norte e para o Sul. Isso faz com que a ioniza¸c˜ao seja reduzida no equador geomagn´etico e incrementada na anomalia equatorial (WALTER et al., 2010).
Conforme j´a mencionado, a regi˜ao de maior preocupa¸c˜ao est´a localizada na regi˜ao da anomalia equatorial. Nesta regi˜ao, a cintila¸c˜ao ocorre com mais frequˆencia ap´os o pˆor-do-sol, podendo persistir por v´arias horas. Ao longo da noite, a cintila¸c˜ao diminui lentamente, mas picos espor´adicos ainda podem ocorrer. Nestas regi˜oes, ´e poss´ıvel obser-var que as flutua¸c˜oes de fase mais r´apidas s˜ao geralmente associadas com as degrada¸c˜oes mais significativas do sinal (WALTER et al., 2010). Logo, pode-se observar que h´a certa correla¸c˜ao entre as cintila¸c˜oes de amplitude e de fase.
Em regi˜oes de altas latitudes, a ionosfera ´e caracterizada por intera¸c˜oes entre o campo magn´etico da Terra com ventos solares e com o campo magn´etico interplanet´ario. No pe-r´ıodo noturno, nas regi˜oes polares (mais de 75o
Am´erica do Norte. Em regi˜oes de altas latitudes, como o Canad´a, estes efeitos persistem mesmo em per´ıodos de baixa atividade solar, j´a que a cintila¸c˜ao est´a associada `a forte aurora (SKONE et al., 2005; WALTER et al., 2010). Nestas regi˜oes, a fotoioniza¸c˜ao ´e menor se comparada `as regi˜oes equatoriais, fazendo com que as cintila¸c˜oes sejam tamb´em menos significativas se comparadas com a regi˜ao equatorial. No entanto, as irregularida-des se movem at´e dez vezes mais rapidamente. Estas irregularidairregularida-des s˜ao maiores e podem causar significativas cintila¸c˜oes de fase (WALTER et al., 2010).
Figura 12: Oval auroral sobre a Am´erica do Norte. Fonte: Skone e Hoyle (2005).
Em regi˜oes de m´edias latitudes, como os Estados Unidos, os efeitos n˜ao s˜ao t˜ao sig-nificativos. No entanto, na ocorrˆencia de tempestades geomagn´eticas, a ionosfera destas regi˜oes pode sofrer dist´urbios causando cintila¸c˜oes nos sinais GNSS. Com as tempestades, o oval auroral se estende na dire¸c˜ao do equador, levando os efeitos de cintila¸c˜ao desta regi˜ao at´e as regi˜oes de m´edias latitudes (CONKER et al., 2003; WALTER et al., 2010).
3.5
Estimativas de cintila¸c˜
ao
Estimativas de cintila¸c˜ao ionosf´erica podem ser definidas em termos da densidade espectral da potˆencia do sinal (power spectral density – PSD) (CONKER et al., 2003). ´Indices espec´ıficos tamb´em podem ser produzidos, os quais denotam fatores de intensidade de cintila¸c˜ao ionosf´erica. Dois ´ındices s˜ao mais destacados na literatura: o ´ındice S4, para cintila¸c˜oes de amplitude, e o ´ındice Sigma-fi, para cintila¸c˜oes de fase.
acarre-tando em r´apidas flutua¸c˜oes na intensidade do mesmo, denominadas cintila¸c˜oes de ampli-tude (CONKER et al., 2003). Em alguns casos, as cintila¸c˜oes podem ser fortes a ponto de acarretar que a intensidade do sinal recebido seja inferior a um limiar de rastreio do receptor, fazendo com que o receptor tenha que readquirir o sinal para tal sat´elite (DATTA-BARUA et al., 2003; WALTER et al., 2010), aspecto que prejudica o processo de solu¸c˜ao das ambiguidades da fase da onda portadora.
3.5.1
Cintila¸c˜
oes de Amplitude e ´Indice S4
Durante as cintila¸c˜oes de amplitude, o ´ındice de refra¸c˜ao da ionosfera varia constan-temente, fazendo com que o sinal seja disperso em diversas dire¸c˜oes al´em da principal dire¸c˜ao de propaga¸c˜ao. Conforme o sinal continua a sua propaga¸c˜ao at´e o solo, peque-nas mudan¸cas na distˆancia de propaga¸c˜ao ao longo destes multicaminhos dispersos do mesmo podem fazer com que haja uma interferˆencia do sinal com ele pr´oprio. Esta auto-interferˆencia pode atenuar ou amplificar o sinal medido pelo receptor (WALTER et al., 2010).
As cintila¸c˜oes de amplitude podem ser medidas pelo ´ındice S4, que consiste no desvio-padr˜ao normalizado (ou coeficiente de varia¸c˜ao) de observa¸c˜oes livres de tendˆencia da intensidade do sinal, as quais s˜ao amostradas a altas taxas (50 Hz por exemplo) num intervalo de 60 segundos. Para a obten¸c˜ao deste ´ındice, a potˆencia do sinal ´e normalizada em rela¸c˜ao `a potˆencia m´edia recebida (DATTA-BARUA et al., 2003; CONKER et al., 2003).
O ´ındice S4 ´e adimensional e alguns limiares para seu valor podem ser encontrados na literatura. Datta-Barua et al. (2003) e Conker et al. (2003) definem que um valor 0 indica ausˆencia de cintila¸c˜ao, enquanto um valor 1 indica severa cintila¸c˜ao. Hegarty et al. (2001) define que o limite superior para o ´ındice S4 ´e de 1,414 (√2). Tiwari et al. (2011) apresenta trˆes n´ıveis de classifica¸c˜ao para o referido ´ındice:
• Cintila¸c˜ao forte: S4≥1;
• Cintila¸c˜ao moderada: 0,5≤S4≤1;
• Cintila¸c˜ao fraca: S4≤0,5.
Hegarty et al. (2001) apresenta quatro n´ıveis de classifica¸c˜ao:
• Cintila¸c˜ao moderada: 0,6≤S4<0,9;
• Cintila¸c˜ao fraca: 0,4≤S4<0,6;
• Cintila¸c˜ao muito fraca: 0,1≤S4<0,4.
Em International Telecommunication Union (2012), trˆes n´ıveis s˜ao definidos, os quais foram adotados em experimentos ao longo deste trabalho:
• Cintila¸c˜ao forte: S4>0,6;
• Cintila¸c˜ao moderada: 0,3≤S4≤0,6;
• Cintila¸c˜ao fraca: S4<0,3.
De uma forma geral, os receptores podem prover valores superiores aos limites te´oricos. Por exemplo, o efeito do multicaminho pode aumentar o ´ındice S4, indicando falsamente a incidˆencia de cintila¸c˜ao ionosf´erica (DATTA-BARUA et al., 2003). Este aspecto ocorre principalmente no in´ıcio ou no final do rastreio de um sat´elite, caracterizados por baixos ˆangulos de eleva¸c˜ao e, consequentemente, maior susceptibilidade ao efeito de multicami-nho (WALTER et al., 2010). Logo, em esta¸c˜oes monitoras de cintila¸c˜ao, ´e essencial que se tenha um n´ıvel de multicaminho bem controlado; t´ecnicas de remo¸c˜ao ou redu¸c˜ao dos efeitos do multicaminho tamb´em podem ser adotadas, como a utiliza¸c˜ao do desvio-padr˜ao da divergˆencia c´odigo/fase (code-carrier divergence –σccd) (VAN DIERENDONCK;
KLO-BUCHAR; HUA, 1993).
A Figura 13 apresenta uma representa¸c˜ao global do ´ındice S4 para o dia 15 de setembro de 2002 `as 21h local em qualquer lugar do planeta, obtida `a partir do modelo WBMOD (definido na Subse¸c˜ao 3.7.1). Nesta data, que estava no pico da atividade solar, n˜ao houve registros de explos˜oes solares. Esta representa¸c˜ao foi utilizada devido `as cintila¸c˜oes mais significativas ocorrerem ap´os o pˆor-do-sol. ´E poss´ıvel observar as regi˜oes mais afetadas: no entorno do equador magn´etico, nas altas latitudes e nas regi˜oes aurorais (CONKER et al., 2003).
Figura 13: Distribui¸c˜ao global do ´ındice S4 em 15 de Setembro de 2000 `as 21h local. Fonte: Conker et al. (2003).
Os passos para a determina¸c˜ao do ´ındice S4 em um receptor monitor de cintila¸c˜ao denominado “GPS Silicon Valley Ionospheric Scintillation Monitor (ISM)” s˜ao apresenta-dos por Datta-Barua et al. (2003). Primeiramente, a variˆancia da intensidade do sinal ´e normalizada pelo quadrado da m´edia da intensidade do sinal em um minuto, obtendo-se o ´ındice S4T:
S4T =
SI2
− SI2
SI2 (3.2)
Onde:
• SI ´e a intensidade do sinal amostrada a uma taxa de 50 Hz;
• S4T ´e o ´ındice “S4 total”, o qual inclui as flutua¸c˜oes de amplitude de qualquer causa
(ou seja, abrange os ru´ıdos);
• o operador X indica o valor esperado (ou a m´edia) para X no intervalo de um minuto.
S4 =
(S4T)
2
−(S4N)
2
(3.3)
Onde:
• S4N ´e o ´ındice referente `as flutua¸c˜oes de amplitude devido a ru´ıdos do ambiente, o
qual ´e obtido por meio da estimativa da densidade m´edia sinal-ru´ıdo ao longo do intervalo de 1 minuto;
• S4´e o ´ındice de cintila¸c˜ao de amplitude adimensionado.
O intervalo de integra¸c˜ao para o c´alculo do ´ındice S4 (1 minuto), apesar de difundido na literatura, parece carecer de justificativa te´orica/f´ısica rigorosa. Em contrate, o ´ındice Sigma-fi, o qual ser´a visto na pr´oxima Subse¸c˜ao, pode ser obtido em diferentes intervalos.
Uma vez definido o ´ındice S4 na frequˆencia L1, o respectivo ´ındice pode ser mapeado nas frequˆencia L2 e L5 atrav´es das seguintes rela¸c˜oes (HEGARTY et al., 2001; PENG et al., 2011):
S4 (L2) =S4 (L1)
f1
f2 1,5
= 1,454·S4 (L1) (3.4)
S4 (L5) =S4 (L1)
f1
f5 1,5
= 1,550·S4 (L1) (3.5)
3.5.2
Cintila¸c˜
oes de Fase e ´ındice Sigma-fi
As cintila¸c˜oes de fase ocorrem a partir de r´apidas varia¸c˜oes na fase do sinal ao percorrer as irregularidades na densidade de plasma na ionosfera. As cintila¸c˜oes de fase podem acarretar em perda de ciclos e perda de sintonia conforme o receptor recebe o sinal do sat´elite (DATTA-BARUA et al., 2003; WALTER et al., 2010).
As cintila¸c˜oes de fase s˜ao mais significativas em regi˜oes de altas latitudes, onde ir-regularidades na densidade de el´etrons s˜ao produzidas por sub-tempestades aurorais, estendendo-se numa regi˜ao de aproximadamente 100 a 300 km de altitude (TIWARI et al., 2011).