UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E DECOMPUTAÇÃO
Desacoplamento de um Gerador Síncrono
Através de um Controle Adaptativo por Modelo
de Referência Baseado em Funções de Base
Radial
Odailson Cavalcante de Oliveira
Orientador: Prof. Dr. Aldayr Dantas de Araújo
Co-orientador: Prof. Dr. Allan de Medeiros Martins
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia Elétrica e de Computação da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Mestre em Ciências.
Seleção de Informação e Referência
Catalogação da Publicação na Fonte. UFRN / Biblioteca Central Zila Mamede
Oliveira, Odailson Cavalcante.
Desacoplamento de um Gerador Síncrono Através de um Controle Adapta-tivo por Modelo de Referência Baseado em Funções de Base Radial/ Odailson Cavalcante de Oliveira - Natal, RN, 2011
93 f.:il
Orientador: Aldayr Dantas de Araújo Co-orientador: Allan de Medeiros Martins
Dissertação (Mestrado) - Universidade Federal do Rio Grande do Norte. Cen-tro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica e de Computação.
1. Desacoplamento - Dissertação. 2. Controle Neural - Dissertação. 3. Funções de Base Radial - Dissertação. 4. Controle Não Linear - Dissertação. 5. Gerador - Dissertação. I. Araújo, Aldayr Dantas de. II. Martins, Allan de Medeiros. III. Universidade Federal do Rio Grande do Norte IV. Título.
Desacoplamento de um Gerador Síncrono
Através de um Controle Adaptativo por Modelo
de Referência Baseado em Funções de Base
Radial
Odailson Cavalcante de Oliveira
Dissertação de Mestrado aprovada em 28 de julho de 2011, pela banca examinadora com-posta pelos seguintes membros:
Prof. Dr. Aldayr Dantas de Araújo (orientador) . . . DEE/UFRN
Prof. Dr. Allan de Medeiros Martins (co-orientador) . . . DEE/UFRN
Prof. Dr. Jorge Dantas de Melo . . . DCA/UFRN
Agradecimentos
Ao meu orientador e ao meu co-orientador, professores Aldayr e Allan, sou grato pela ori-entação e grandes contribuições que tornaram possível que esse trabalho fosse realizado.
À minha família que depositou muita fé nos meus esforços, apoiando nos mais importan-tes momentos de minha vida e carreira.
Aos demais colegas de pós-graduação, pela amizade, críticas e sugestões.
Resumo
Neste trabalho, será apresentada uma técnica alternativa para o desacoplamento e con-trole de sistemas não lineares. A estratégia de desacoplamento proposta está baseada numa rede neural RBF (Radial Basis Functions) combinada com o controle adaptativo por modelo de referência. A técnica é aplicada no controle do modelo de um gerador síncrono, cujas variáveis de saída são o ângulo de carga e o fluxo concatenado no en-rolamento de campo. O sistema do gerador síncrono é acoplado, ou seja, a mudança numa das variáveis de entrada do sistema altera mais de uma variável de saída. A rede RBF realizará o desacoplamento do sistema, fazendo o controle de forma independente de cada uma das saídas. Tal estratégia não exige conhecimento dos parâmetros do sistema e observa-se um comportamento estável da rede RBF, tanto na presença de incertezas na modelagem, como de perturbações no sistema. Será mostrada a simplicidade da apli-cação da técnica e do projeto da rede RBF. Os pesos, que interligam as camadas oculta e de saída da rede, são ajustados utilizando uma lei adaptativa em tempo real. Essa lei adaptativa foi desenvolvida pelo método de funções de energia de Lyapunov. O sistema de controle e desacoplamento faz uso dos sinais filtrados da saída do gerador e dos sinais dos erros entre as saídas do gerador e as saídas do modelo referência. Assim, através dos sinais de controle aplicados pela rede RBF, cada saída do sistema do gerador é forçada a se comportar conforme uma dinâmica desejada, dada pelo modelo de referência. Quando a rede RBF aproxima adequadamente os sinais de controle, o desacoplamento do sistema é alcançado. Os resultados do desempenho da estratégia serão apresentados através de simulações. Também será mostrada a prova matemática de estabilidade do sistema em malha fechada para o caso escalar.
Palavras-chave: Desacoplamento, Controle Neural, Funções de Base Radial,
Abstract
An alternative nonlinear technique for decoupling and control is presented. This tech-nique is based on a RBF (Radial Basis Functions) neural network and it is applied to the synchronous generator model. The synchronous generator is a coupled system, in other words, a change at one input variable of the system, changes more than one output. The RBF network will perform the decoupling, separating the control of the following outputs variables: the load angle and flux linkage in the field winding. This technique does not require knowledge of the system parameters and, due the nature of radial basis functions, it shows itself stable to parametric uncertainties, disturbances and simpler when it is ap-plied in control. The RBF decoupler is designed in this work for decouple a nonlinear MIMO system with two inputs and two outputs. The weights between hidden and output layer are modified online, using an adaptive law in real time. The adaptive law is deve-loped by Lyapunov’s Method. A decoupling adaptive controller uses the errors between system outputs and model outputs, and filtered outputs of the system to produce con-trol signals. The RBF network forces each outputs of generator to behave like reference model. When the RBF approaches adequately control signals, the system decoupling is achieved. A mathematical proof and analysis are showed. Simulations are presented to show the performance and robustness of the RBF network.
Keywords: Decoupling, Neural Control, Radial Basis Functions, Adaptive Nonlinear
Sumário
Sumário i
Lista de Figuras iii
Lista de Tabelas v
Lista de Símbolos e Abreviaturas vii
1 Introdução 1
1.1 Motivação . . . 1
1.2 Controle e Desacoplamento do Gerador Síncrono . . . 3
1.3 Redes Neurais . . . 4
1.4 Estrutura da Dissertação . . . 5
2 Máquina Síncrona 7 2.1 Máquina Síncrona . . . 7
2.2 Modelo da Máquina Síncrona . . . 9
3 Redes RBF e a Estratégia de Desacoplamento 13 3.1 Redes de Funções de Base Radial . . . 13
3.2 Rede RBF e o MRAC . . . 17
3.3 Desacoplamento de Sistemas . . . 18
3.4 Estrutura de Controle e Desacoplamento . . . 20
3.5 Filtros de Entrada . . . 22
3.6 Centros e Espalhamentoσ . . . 25
3.7 Lei de Adaptação dos Pesos da Rede RBF . . . 25
3.8 Modelos de Referência . . . 27
4 Análise de Estabilidade 29 4.1 Caso Escalar . . . 29
4.2 Persistência de Excitação . . . 33
5 Simulações 35 5.1 Características do Projeto . . . 35
5.2 Simulações . . . 38
5.3 Robustez a Perturbações nas Medições de Saída . . . 46
5.3.1 Perturbação na Saída do Fluxoψf . . . 46
5.4 Perturbação na Solicitação de Demanda de Carga . . . 54
6 Conclusões e Perspectivas 63 Referências Bibliográficas 65 A Informações Matemáticas Auxiliares 69 A.1 Normas e Espaço Lp . . . 69
A.2 Lema de Barb˘alat . . . 70
A.3 Positividade de Matrizes e Funções . . . 70
A.3.1 Matrizes . . . 70
A.3.2 Funções . . . 70
A.4 Considerações sobre Estabilidade . . . 70
Lista de Figuras
2.1 Esquema da Máquina Síncrona [Anderson e Fouad, 1994] . . . 8
2.2 Configuração do Sistema de Geração Ligado a um Barramento Infinito . . 9
3.1 Estrutura Básica de uma Rede RBF . . . 14
3.2 Estrutura Básica do Controle MRAC . . . 17
3.3 Diagrama de Acoplamento/Desacoplamento . . . 19
3.4 Estrutura de Controle e Desacoplamento . . . 21
3.5 Esquema dos Filtros dos Sinais de Saída . . . 24
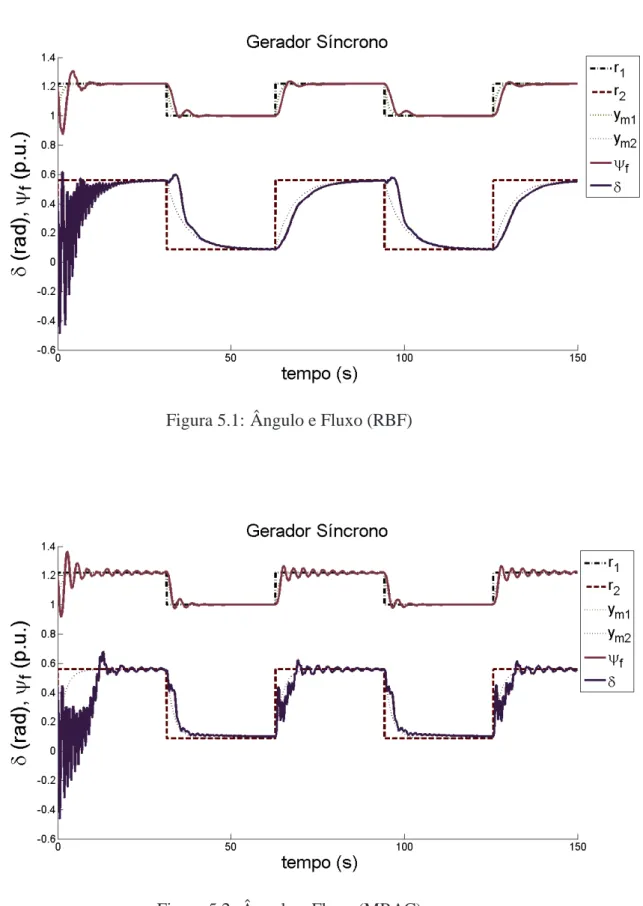
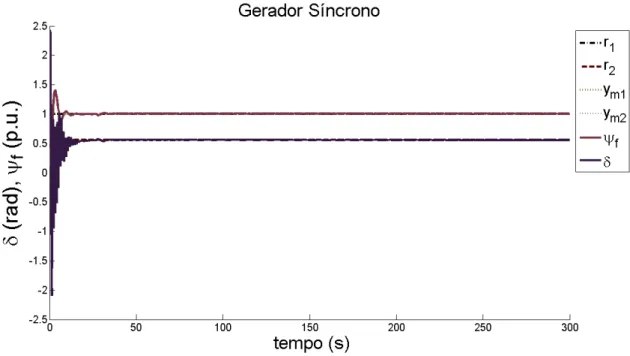
5.1 Ângulo e Fluxo (RBF) . . . 39
5.2 Ângulo e Fluxo (MRAC) . . . 39
5.3 Variação do Ângulo de Carga e Tensão no Enrolamento de Campo (RBF) 41 5.4 Variação do Ângulo de Carga e Tensão no Enrolamento de Campo (MRAC) 41 5.5 Tensão no Terminal do Gerador, Potências Mecânica e Elétrica e De-manda de Carga (RBF) . . . 42
5.6 Tensão no Terminal do Gerador, Potências Mecânica e Elétrica e De-manda de Carga (MRAC) . . . 42
5.7 Sinais de Controle/Saídas da RBF . . . 44
5.8 Sinais de Controle (MRAC) . . . 44
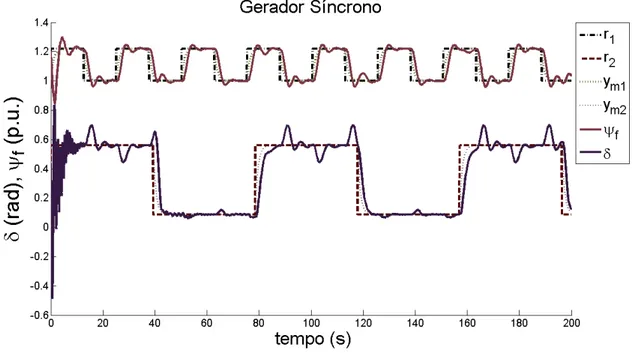
5.9 Ângulo e Fluxo- Sinais de Referência de Frequências Distintas (RBF) . . 45
5.10 Ângulo e Fluxo- Sinais de Referência de Frequências Distintas (MRAC) . 45 5.11 Ângulo e Fluxo- Ruído de Medição no Fluxo (RBF) . . . 48
5.12 Ângulo e Fluxo- Ruído de Medição no Fluxo (MRAC) . . . 48
5.13 Variação do Ângulo de Carga e Tensão no Enrolamento de Campo- Ruído de Medição no Fluxo (RBF) . . . 49
5.14 Variação do Ângulo de Carga e Tensão no Enrolamento de Campo- Ruído de Medição no Fluxo (MRAC) . . . 49
5.15 Tensão no Terminal do Gerador e Potências Mecânica e Elétrica- Ruído de Medição no Fluxo (RBF) . . . 50
5.16 Tensão no Terminal do Gerador e Potências Mecânica e Elétrica- Ruído de Medição no Fluxo (MRAC) . . . 50
5.17 Sinais de Controle- Ruído de Medição no Fluxo (RBF) . . . 51
5.18 Sinais de Controle- Ruído de Medição no Fluxo (MRAC) . . . 51
5.19 Pesos (Ângulo)- Ruído de Medição no Fluxo (RBF) . . . 52
5.20 Pesos (Fluxo)- Ruído de Medição no Fluxo (RBF) . . . 52
5.21 Parâmetros (Ângulo)- Ruído de Medição no Fluxo (MRAC) . . . 53
5.22 Parâmetros (Fluxo)- Ruído de Medição no Fluxo (MRAC) . . . 53
5.23 Esquema do Filtro para Produção da Variável Pv . . . 54
5.24 Ângulo e Fluxo- Perturbação de Carga (RBF) . . . 55
5.25 Ângulo e Fluxo- Perturbação de Carga (MRAC) . . . 55
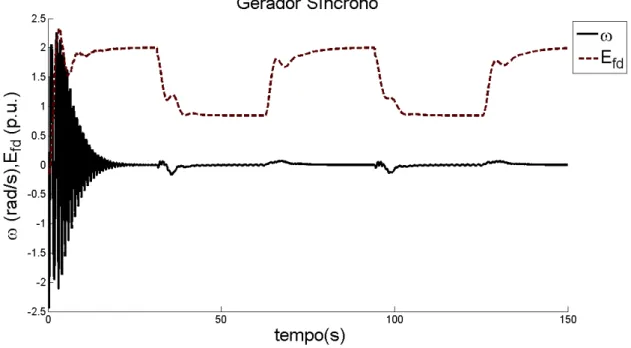
5.26 Velocidade Angular e Tensão no Enrolamento de Campo- Perturbação de Carga (RBF) . . . 56
5.27 Velocidade Angular e Tensão no Enrolamento de Campo- Perturbação de Carga (MRAC) . . . 56
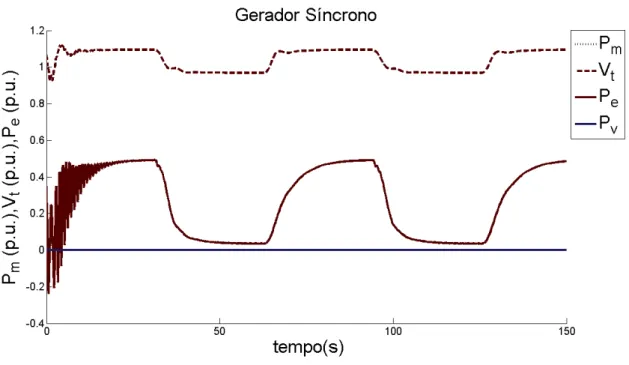
5.28 Tensão no Terminal do Gerador e Potências Mecânica e Elétrica- Pertur-bação de Carga (RBF) . . . 57
5.29 Tensão no Terminal do Gerador e Potências Mecânica e Elétrica- Pertur-bação de Carga (MRAC) . . . 57
5.30 Sinais de Controle- Perturbação de Carga (RBF) . . . 58
5.31 Sinais de Controle- Perturbação de Carga (MRAC) . . . 58
5.32 Pesos (Ângulo)- Perturbação de Carga (RBF) . . . 59
5.33 Pesos (Fluxo)- Perturbação de Carga (RBF) . . . 59
5.34 Parâmetros (Fluxo)- Perturbação de Carga (MRAC) . . . 60
5.35 Parâmetros (Ângulo)- Perturbação de Carga (MRAC) . . . 60
5.36 Ângulo e Fluxo- Perturbação de Carga (RBF) . . . 61
Lista de Tabelas
3.1 Tipos Comuns de Funções de Base Radial . . . 15
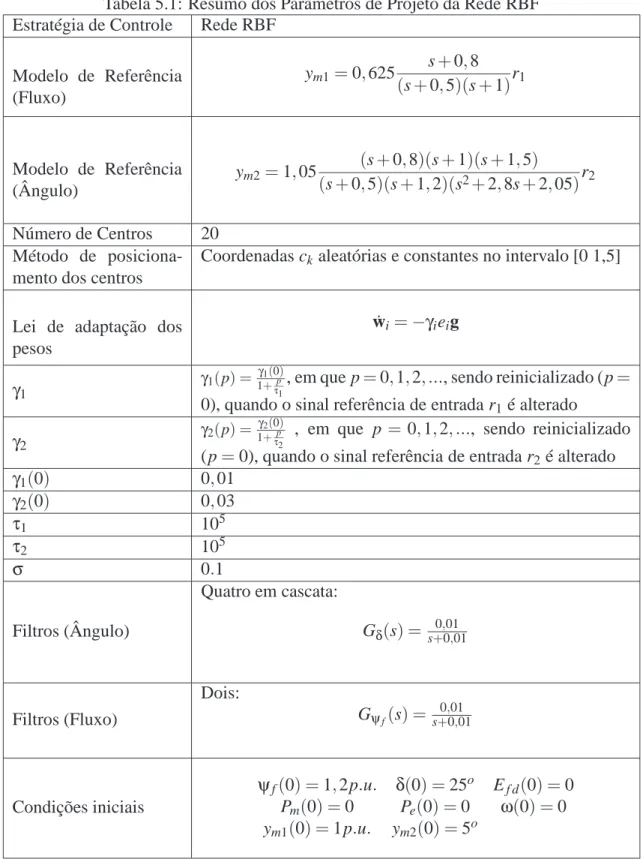
5.1 Resumo dos Parâmetros de Projeto da Rede RBF . . . 36
5.2 Resumo dos Parâmetros de Projeto MRAC . . . 37
A.1 Principais Normas Usadas . . . 69
Lista de Símbolos e Abreviaturas
(.)T Operador transposto
Ef d Tensão no enrolamento de campo
GMRAC Função de transferência dos filtros do MRAC
GPv(s) Filtro de sinais aleatórios
Gδ(s) Função de transferência do filtro para sinalδ
Gψf(s) Função de transferência do filtro para sinalψf
H Constante de inércia
N Número de centros da camada oculta
Pe Potência elétrica
Pm Potência mecânica
Pv Potência de demanda de carga
Te Constante de tempo de excitação de campo
Tg Constante de tempo da governadora
Tt Constante de tempo da turbina
ΣN
k=1 Operador somatório de k=1, ...,N αi Índice de inversão i
δ Ângulo de carga ˙
( ) Operador derivada
ηψf Ruído de Medição Aplicado ao Fluxoψf
Z
P Função de transferência escolhida para o modelo de referência
γi Ganho adaptativo para o vetor de pesos wi
ωMRAC Vetor regressor do MRAC
ck Vetor de coordenadas do k-ésimo centro da camada oculta
e Vetor de erro entre as saídas do sistema e as saídas do modelo
ere f Vetor de erro entre as saídas do sistema e os sinais referência de entrada
g Vetor composto pelas respostas das funções de base da camada oculta da RBF
r Vetor dos sinais de referência de entrada
u Vetor do sinal de controle
v Vetor dos sinais filtrados do sistema
wi Vetor de pesos que conectam a camada oculta à saída i
xRBF Vetor de entrada da rede RBF
y Vetor dos sinais de saída do sistema
ym Vetor do sinal de saída dos modelos de referência
ω Variação do ângulo de cargaδ
ω0 Velocidade angular do campo girante
ψf Fluxo concatenado no enrolamento de campo
σk Espalhamento da função de base radial do centro k
θ1...4 Ganhos adaptativos do MRAC
d Constante de amortecimento
dmax Distância máxima entre os centros da camada oculta
ek Erro entre a saída k do sistema e a saída k do modelo
ere f i Erro entre a saída i do sistema e o sinal referência de entrada i
fi i-ésima saída da rede RBF
i Constante inteira relacionada às saídas e às entradas do sistema MIMO
k Constante inteira relacionada aos centros da RBF
ke Ganho de excitação de campo
p1,···,7 Constantes paramétricas da máquina síncrona
rf Resistência do enrolamento de campo
s Variável complexa
uf iltrado Sinal filtrado da entrada do sistema do MRAC
ui Sinal de controle i aplicada à entrada i do sistema
umrac Sinal de controle do MRAC
vi Sinal filtrado da saída i
wik Peso entre o k-ésimo centro da camada oculta e a i-ésima saída
x′d Reatância transitória de eixo direto
xd Reatância da armadura do eixo direto
xf Reatância do enrolamento de campo
xq Reatância da armadura do eixo em quadratura
xa f Reatância mútua de eixo direto
yf iltrado Sinal filtrado da saída do sistema do MRAC
yi Sinal de saída i do sistema
ymi Sinal de saída i do modelo de referência i
ERP Estritamente Real Positivo
MIMO Multiple Input and Multiple Output (Mútiplas Entradas e Múltiplas Saídas)
MLP Multilayer Perceptrons (Perceptrons de Múltiplas Camadas)
MRAC Model Reference Adaptive Control (Controle Adaptativo por Modelo de
Refe-rência)
PE Persistentemente Excitante
PI Proporcional Integral
PID Proporcional Integral Derivativo
RBF Radial Basis Functions (Funções de Base Radial)
RNA Rede Neural Artificial
SISO Single Input and Single Output
Capítulo 1
Introdução
1.1
Motivação
Nos sistemas de geração, em termos gerais, existem diversas variáveis que influenciam direta ou indiretamente na energia produzida. Exige-se um padrão de qualidade elevado na geração da energia consumida nas indústrias e por consumidores comuns. As tensões geradas e a frequência elétrica devem ter seus valores estáveis, mesmo diante de faltas no sistema. De fato, existem grandes consumidores que têm seus capitais dependentes da qualidade da energia fornecida por esses sistemas. Há grandes somas em dinheiro em jogo, que poderiam ser perdidos na ocorrência de um mau funcionamento na geração.
Atualmente, nos sistemas de geração, os geradores operam com elevadas margens de segurança, com o objetivo de garantir estabilidade. No entanto, essas margens elevadas acabam por reduzir o rendimento do sistema. Cada gerador trabalha suprindo potência inferior à sua potência nominal. Algumas estratégias de controle e desacoplamento podem reduzir tais margens e garantir o funcionamento estável dos geradores.
Há também uma dificuldade no controle dos geradores, por tratar-se de um sistema em que a mudança de uma variável de entrada altera mais de uma variável de saída. Esse fenômeno é conhecido como acoplamento. Numa hidrelétrica, a tensão e a frequência geradas, que são variáveis de saída, dependem de variáveis de entrada como a posição angular das pás da turbina, que captam energia da queda d’água, e do fluxo magnético nos enrolamentos de campo do gerador. A mudança, mesmo que em apenas uma dessas variáveis de entrada, afetará as duas variáveis de saída. O acoplamento deixa o sistema mais difícil de ser controlado. Em casos como esse, uma técnica de desacoplamento pode facilitar o controle.
2 CAPÍTULO 1. INTRODUÇÃO
a tensão, produzirá uma combinação de dois sinais de controle que serão aplicados às entradas do gerador. Tal combinação modificará a frequência e a tensão para os valores desejados. Dessa maneira, o dispositivo e o sistema do gerador, juntos, podem ser tratados como dois sistemas independentes, cada um com uma entrada e uma saída.
Outra dificuldade no projeto dos controladores está em conhecer os parâmetros do sistema que queremos controlar. No caso de um gerador síncrono, certos parâmetros são difíceis de estimar e, se forem mal calculados, o modelo matemático resultante do gera-dor pode ser distante do real. Neste caso, pode-se utilizar o controle adaptativo, que é aplicado no controle de sistemas cujos parâmetros são incertos, ou em sistemas comple-tamente desconhecidos. O controle adaptativo ajusta-se em função das leituras dos sinais provenientes do sistema controlado. Conforme a adaptação avança, o controlador passa a produzir sinais de controle capazes de fazer a saída do sistema se comportar conforme ou-tra planta proposta, chamada de modelo de referência. Esse modelo de referência possui uma dinâmica e parâmetros conhecidos e escolhidos pelo projetista do controlador. Os modelos de referência apresentam as características desejadas para o comportamento do sistema controlado. Num sistema MIMO acoplado, o efeito do controlador adaptativo é fazer cada uma das saídas seguir uma das saídas do modelo de referência escolhido. Se o controle adaptativo for capaz de convergir cada saída para uma saída do modelo e se esse modelo não for acoplado, o sistema com acoplamento pode ser tratado como um sistema desacoplado ou, pelo menos, o efeito do acoplamento será reduzido.
Os controladores adaptativos têm sido combinados com diversas outras técnicas, me-lhorando o desempenho e robustez do sistema. Uma dessas combinações é o controle adaptativo com redes neurais de funções de base radial ou simplesmente redes RBF [Li-ang, 2008]. Essa combinação é proposta nesta dissertação como alternativa ao desaco-plamento e controle do gerador. As redes RBF, de forma resumida, são constituídas de parâmetros que são ajustados para realizar determinada aproximação funcional. Assim como os controladores adaptativos convencionais, a rede RBF também possui parâmetros que se adaptam livremente. Quando tais parâmetros convergem para certos valores que permitam que a rede RBF exerça um comportamento desejado, a aproximação foi alcan-çada corretamente. O que, basicamente, uma rede RBF executará é transformar o espaço dos estímulos de entrada da rede para outro espaço de dimensão oculta, geralmente de di-mensão maior. Nesse espaço oculto, podemos ter maior poder adaptativo dos parâmetros da rede RBF [Park e Sandberg, 1991]. No sistema do gerador síncrono, esses estímulos de entrada são sinais provenientes das medições das saídas do gerador e das entradas de re-ferência. Os estímulos de entrada são processados pela rede RBF, que produzirá os sinais de controle aplicados às entradas do gerador. Os sinais de controle serão capazes de fazer com que cada saída do gerador se comporte como uma saída do modelo de referência.
1.2. CONTROLE E DESACOPLAMENTO DO GERADOR SÍNCRONO 3
ponto de operação são vistas como perturbações de carga de natureza aleatória. Adicio-nalmente, o modelo matemático representativo do sistema real do gerador é algumas vezes mal aproximado, gerando incertezas no comportamento. Somente o controle adaptativo convencional não é capaz de vencer esses distúrbios e incertezas, perdendo a estabilidade facilmente nessas situações [Rohrs et al., 1985]. Geralmente, são realizadas modificações no algoritmo de adaptação que dão robustez ao sistema de controle. No caso da rede RBF, as funções base radial limitam suas respostas caso o sistema tenda a perder a estabilidade. Essa característica agrega robustez ao sistema de controle diante dessas condições.
1.2
Controle e Desacoplamento do Gerador Síncrono
Existem dificuldades quando se pretende controlar o ângulo de carga e o fluxo conca-tenado no enrolamento de campo porque há um forte acoplamento no sistema do gerador síncrono. Muitas estratégias têm sido aplicadas para resolver esse problema, e ainda mantendo a estabilidade do gerador. Algumas dessas estratégias envolvem o tratamento analítico do complexo modelo do gerador [Okou et al., 2003].
Atualmente, a grande maioria dos controladores empregados é de característica li-near, como os controladores proporcional-integral (PI) e proporcional-integral-derivativo (PID). O uso desses tipos de controladores impõe restrições no controle de sistemas não lineares, porque são projetados para funcionar em um ponto fixo de operação e para um modelo linearizado do sistema. Essas estratégias ignoram as variações paramétri-cas da planta, incertezas na modelagem do sistema e o acoplamento (no paramétri-caso de sistemas MIMO). Dessa forma, como já comentado anteriormente, o gerador deve ser controlado respeitando uma larga margem de segurança, garantindo que o gerador fique em torno do ponto de operação desejado, e para isso, a potência gerada que ele pode fornecer é limitada a um valor muito inferior à potência nominal.
Assim, técnicas de desacoplamento e de controle avançado costumam ser aplicadas para caso em que se precisa de mais eficiência. Pode-se citar o algoritmo de Hirschorn [1979], que utiliza o conhecimento do modelo do sistema para desacoplá-lo. No entanto, nem sempre temos disponível um modelo matemático da planta, ou, se temos, pode ser uma aproximação distante da real. Além do mais, o trabalho matemático envolvido no desacoplamento, através de algoritmos como o de Hirschorn, pode ser muito complexo [Araújo e Singh, 1983].
O padrão na energia fornecida pelos geradores deve ser elevado, a tensão e frequên-cia geradas devem ser mantidas dentro de faixas apropriadas de valores, mesmo sob as faltas que podem ocorrer no sistema. O gerador não pode perder o sincronismo indepen-dentemente das circunstâncias operacionais. Durante a operação, os impactos de potência aleatórios, quando cargas são introduzidas e removidas no barramento do gerador, causam mudanças no ponto de operação, e o gerador deve continuar funcionando normalmente [Anderson e Fouad, 1994]. Assim, o controle também atua no gerador para manter tal padrão operacional. Portanto, novas estratégias de controle são desenvolvidas e aplicadas para esse fim.
4 CAPÍTULO 1. INTRODUÇÃO
parâmetros são desconhecidos e é simples de ser desenvolvida em comparação com téc-nicas analíticas, que necessitam do modelo do sistema. Em mais detalhes, a rede RBF, combinada ao controle adaptativo, será a estratégia utilizada para fazer as saídas do ângulo de carga e do fluxo concatenado no enrolamento de campo da máquina serem controladas de modo independente. As entradas do sistema são a tensão de excitação do enrolamento de campo e a potência mecânica de rotação da turbina, configurando um sistema MIMO acoplado.
O ângulo de carga e o fluxo foram escolhidos como saídas devido à importância des-sas variáveis na análise de estabilidade. Uma aproximação matemática do comportamento do ângulo de carga do gerador nos permite dizer que, para uma operação estável, ele se mantém menor que noventa graus1. Acima disso, ele está numa região de instabilidade e perderá o sincronismo se não for trazido à região de estabilidade pelo controlador. No entanto, outras variáveis de saída podem ser escolhidas para controle. Pode-se usar a vari-ação do ângulo de carga, a tensão de saída e as potências, ativa e reativa. Mas, costuma-se utilizar o ângulo de carga e o fluxo para controle de outras variáveis importantes. Por exemplo, pode-se determinar para quais valores o ângulo de carga e o fluxo devem ser conduzidos, de maneira que a tensão de saída e a potência elétrica gerada convirjam para os valores desejados.
A rede RBF é uma solução de controle e desacoplamento quando o sistema é muito complexo e de parâmetros desconhecidos. Para um sistema não linear, como o do gerador descrito anteriormente, um controle não linear apresenta maior robustez e flexibilidade a mudanças no ponto de operação, quando comparado aos controladores tradicionais e lineares.
1.3
Redes Neurais
Uma rede neural utilizada como controlador é uma classe de controle não linear apli-cado com sucesso em problemas mais difíceis para as técnicas tradicionais. A combinação de redes neurais com outras estratégias de controle é bastante comum e segue o ritmo de evolução das tecnologias de controle que, atualmente, são combinações de técnicas para melhorar o desempenho do sistema em malha fechada. Alguns estudos realizaram essas combinações com resultados interessantes. Vejamos alguns desses.
Um controle adaptativo por modelo de referência (MRAC) aliado com as redes de funções de base radial, ou redes RBF, foi empregado para desacoplar o sistema não linear de um deaerator, que é um dispositivo amplamente utilizado para a remoção de ar e outros gases dissolvidos na fonte de água, que abastece caldeiras geradoras de vapor [Liang, 2008]. Neste trabalho são combinadas duas redes RBF, uma para identificar o sistema e outra para controlá-lo. Cada saída é forçada a se comportar como um modelo de referência e os pesos são ajustados em tempo real através do Método do Gradiente, minimizando uma função de custo. O fato de se usar uma rede RBF para identificação proporciona
1Se o gerador operasse com ângulo de carga igual a noventa graus, ele estaria fornecendo potência
1.4. ESTRUTURA DA DISSERTAÇÃO 5
equações que são expressas em função dos pesos da rede e não mais dos parâmetros do sistema. Assim, a computação do gradiente da função de custo é facilitada. Uma vez que a rede RBF responsável pela identificação tenha aprendido como o sistema se comporta, os seus pesos são parâmetros adequados para o cálculo do gradiente utilizado pela rede RBF responsável pelo controle.
Em outro trabalho proposto na literatura [Dai et al., 2001], uma rede neural percep-trons de múltiplas camadas (MLP) é treinada offline e depois é empregada para desaco-plar um exemplo matemático de um sistema não linear. Neste artigo, também é feita uma comparação da rede MLP com o algoritmo de desacoplamento proposto por Singh [1982], usado para encontrar o sistema inverso de um sistema não linear. Este trabalho mostra a simplicidade do uso de uma rede neural como técnica de desacoplamento, comparada à estratégia do algoritmo proposto por Singh.
Em outro trabalho proposto [Quan e Yang, 2002], métodos de regressão do kernel também foram utilizados para desacoplamento de sistemas. O autor utiliza um sistema não linear teórico como exemplo, e uma máquina de vetor de suporte (SVM) é projetada e seus pesos ajustados, de modo a fazer os controles das saídas de modo independente.
No trabalho de Huang e Chiou [2006], foi aplicada uma rede neural baseada também numa RBF cujos pesos são adaptados através de modos deslizantes. Neste mesmo traba-lho, é apresentada uma prova de estabilidade desenvolvida pelo método das funções de energia associada ao sistema, através de funções de Lyapunov. São apresentadas simu-lações para o caso de um pêndulo bi-articulado. Os pesos são ajustados através de uma função sinal que depende do erro entre os modelos de referência e as saídas do sistema, melhorando bastante, assim, o transitório. O autor propõe um fator nos ajustes dos pesos para diminuir o efeito de “chattering”, que é muito comum nos controladores à relé. Em outro trabalho [Rashid, 2005], também são utilizados modos deslizantes numa rede neural RBF para controle de um motor síncrono de ímã permanente.
1.4
Estrutura da Dissertação
No capítulo 2, são apresentados os conceitos gerais do funcionamento das máquinas síncronas. São explicados o que é sincronismo e a ação da máquina funcionando como gerador e como motor. Depois, é apresentado o modelo matemático usado nas simulações. O capítulo 3 introduz o leitor ao ambiente das redes neurais, explicando de modo breve os seus conceitos básicos e os princípios de funcionamento. Nesse capítulo, são abordadas as redes neurais baseadas em funções de base radial, cuja aplicação, como estratégia de controle e desacoplamento, é o foco de estudo desta dissertação. Ainda nesse capítulo, em breves tópicos, aborda-se a aplicação da rede neural junto com o MRAC e a estratégia de desacoplamento.
No capítulo 4, é apresentada a prova matemática de estabilidade do sistema de controle baseado na rede RBF proposto neste trabalho. A prova é desenvolvida pelo método de Lyapunov, sendo elaborada para o caso SISO de um sistema não linear.
6 CAPÍTULO 1. INTRODUÇÃO
pela rede RBF no controle adaptativo.
Capítulo 2
Máquina Síncrona
Neste capítulo, será apresentada uma visão geral da máquina síncrona e seu funcio-namento. Inicialmente, será discutida a constituição da máquina e sua importância nos sistemas de geração. Na seção 2.1, serão dados os conceitos básicos e tipos de operação da máquina síncrona, funcionando como motor ou gerador. Ainda na mesma seção, en-traremos no assunto do sincronismo e porque é necessário nos sistemas de potência. Na seção 2.2, será mostrado o modelo matemático utilizado nas simulações.
2.1
Máquina Síncrona
Os geradores síncronos formam a principal fonte de energia elétrica dos sistemas de potência. Nas indústrias, muitas cargas são movimentadas através de motores síncronos. Os bancos de energia reativa também requisitam, muitas vezes, o emprego de máquinas síncronas. Todos esses dispositivos elétricos giram em torno do personagem principal: a máquina síncrona [Anderson e Fouad, 1994].
Uma máquina síncrona tem dois elementos essenciais: o campo e a armadura (Figura 2.1). Normalmente, o campo está localizado no rotor da máquina e a armadura no estator. O enrolamento de campo é excitado através de corrente contínua produzida por uma fonte de corrente contínua externa, conhecida como excitatriz. Quando o rotor gira devido à ação de um torque, por exemplo, o torque produzido por uma turbina eólica, tem-se que o campo magnético presente no campo do rotor, naturalmente, passa a entrar em movimento. A rotação desse campo induz nas bobinas do estator tensões alternadas. A frequência e a intensidade da corrente, quando uma carga é conectada ao terminal do enrolamento do estator, dependem da velocidade de rotação do rotor. A frequência elétrica do estator está sincronizada com a velocidade de rotação mecânica do rotor, daí deriva-se a designação "máquina síncrona".
Quando duas ou mais máquinas são interconectadas, as tensões e correntes de cada uma devem estar na mesma frequência e velocidade do rotor de cada máquina. Isso é conseguido quando os rotores das máquinas interconectadas estão em sincronismo.
8 CAPÍTULO 2. MÁQUINA SÍNCRONA
Figura 2.1: Esquema da Máquina Síncrona [Anderson e Fouad, 1994]
torque eletromagnético que tende a alinhar os dois campos. Quando a máquina funciona como gerador, o torque eletromagnético se opõe à rotação do rotor e, assim, um torque mecânico deve ser aplicado ao rotor para sustentar essa rotação. O torque eletromagnético (potência) de saída é alterado apenas quando alteramos o torque mecânico no rotor. O efeito de se aumentar o torque mecânico é adiantar o rotor para uma nova posição em relação ao campo girante do estator. Reduzindo este torque mecânico, retardamos essa posição. Em condições normais de operação e em regime permanente, o campo do rotor e o campo girante do estator têm a mesma velocidade, de modo que existe uma separação angular entre eles, que depende da potência elétrica de saída da máquina. Essa posição angular no modelo que será apresentado a seguir é o ângulo de cargaδ.
No caso da máquina funcionar como motor, as regras do torque elétrico e mecânico são invertidas. O torque eletromagnético sustenta a rotação, enquanto as cargas mecânicas atreladas ao rotor se opõem a ela. O efeito de se aumentar a carga mecânica é de retardar a posição do rotor com relação ao campo girante do estator.
O modelo da máquina síncrona é notoriamente não linear e o desenvolvimento pode ser consultado em Kundur [1994] ou em [IEEE Guide for Synchronous Generator
Mo-deling Practices and Applications in Power System Stability Analyses, 2003]. Embora
2.2. MODELO DA MÁQUINA SÍNCRONA 9
2.2
Modelo da Máquina Síncrona
A estrutura do sistema de geração é mostrada na Figura 2.2, onde uge ueatuam sobre a
potência mecânica e sobre a tensão no enrolamento de campo, respectivamente. O sistema de controle manipula essas duas variáveis com o objetivo de manter a máquina no ponto de operação desejado.
Figura 2.2: Configuração do Sistema de Geração Ligado a um Barramento Infinito
As equações de estado foram modeladas e divididas em equação da máquina síncrona, equação do sistema de excitação, equação da turbina e governadora e equações das po-tências mecânica e elétrica.
Máquina síncrona:
¨
δ=p1sen(2δ)−p2δ˙−p3ψfsen(δ) +p4Pm−p4Pv
˙
ψf =p5cosδ−p6ψf +p7Efd
em queδ é o ângulo de carga da máquina, que é a diferença angular entre o eixo-d do rotor e o campo girante do estator (Observe a Fig. 2.1). O sincronismo da máquina é atingido quandoδé constante, ou seja, quando a máquina entra em regime permanente. O fluxo concatenado no enrolamento de campo é a variávelψf. A variável Pmé a potência
mecânica aplicada ao rotor da máquina, e Pvé a demanda de potência de carga do gerador,
representa as cargas elétricas introduzidas no barramento do gerador. A variável Ef d é a
tensão no enrolamento de campo aplicada pela excitatriz.
Os parâmetros da máquina podem ser calculados pelas expressões:
p1=
ω0V2(xq−x′d)
4H(xt+x′d)(xt+xq)
p2= ω0d
2H
p3= ω0V xa f
2Hxf(xt+x′d)
p4= ω0
10 CAPÍTULO 2. MÁQUINA SÍNCRONA
p5=
ω0rfV xa f
xf(xt+x′d)
p6=
ω0rf(xt+x′d)
xf(xt+x′d)
p7= ω0rf
xf
x′d=xd−
x2a f xf
Sistema de excitação:
TeE˙fd=−Efd+keue
em que Teé conhecido como constante de tempo de excitação, e keé o ganho de excitação
de campo. A variável ueé a entrada que controla a tensão Ef d.
Turbina e governadora:
TtP˙m=−Pm+Pg
TgP˙g=−Pg+ug
em que Tte Tg são as constantes de tempo da turbina e da governadora. A variável ugé o
sinal que controla a potência mecânica Pm.
Potência elétrica gerada:
Pe=
p3ψfsinδ−p1sin(2δ) p4
O ângulo de carga δ aumenta conforme mais cargas elétricas são alimentadas pelo gerador, e o valor máximo de potência elétrica gerada ocorre para ângulo de carga igual a noventa graus. Acima disso, o gerador perde o sincronismo e a estabilidade. Para evitar que o ângulo δ exceda noventa graus, os sistemas de controle dos geradores mantêm margens de segurança estreitas para o ângulo, limitando a quantidade de cargas elétricas que podem ser ligadas ao gerador.
Tensão no terminal da máquina:
Vt= s
V xqsinδ
xt+xq 2
+
V x′dcosδ
xt+x′d
+ xa fxtψf (xt+x′d)xf
2
Os parâmetros da máquina síncrona são:
• ω0- Velocidade angular do campo girante
• H - Constante de inércia
• xf - Reatância do enrolamento de campo • xd - Reatância da armadura do eixo direto
2.2. MODELO DA MÁQUINA SÍNCRONA 11
• xa f - Reatância mútua de eixo direto
• xq- Reatância da armadura do eixo em quadratura
• d - Constante de amortecimento
• rf - Resistência do enrolamento de campo
• xt - Reatância da armadura do eixo em quadratura
Dados numéricos:
H=3,82s xd=1,75p.u. xq=1,68p.u. xa f =1,56p.u.
xf =1,665p.u. xt=0,3p.u. rf =0,0012p.u d=0,006s
V =1p.u. x′d =0,285p.u. f =60Hz ke=25
Te=0,04s Tt =0,3s Tg=0,08s ω0=2πf
Uma máquina síncrona pode ser modelada adequadamente através de suas equações de estado. Essas equações descrevem como as variáveis de estado da máquina síncrona evoluem com o passar do tempo, dada uma condição inicial x(0)e um sinal de referên-cia de entrada. Podemos conduzir a máquina síncrona para o ponto de operação desejado através do controle das variáveis uee ug. O controle nos sistemas de geração busca manter
o gerador síncrono operando com segurança, dando certas margens ao ângulo de carga, para impedir que ele ultrapasse determinada magnitude. O surgimento de algum impacto de potência pode fazer o ângulo de carga aumentar, fazendo a máquina perder o sincro-nismo e causar a instabilidade do sistema de potência.
A forma vetorial da equação da máquina síncrona é dada pela expressão 2.1.
˙x=A(x) +Bu, x∈M=R6 (2.1) em que
x= [δ ω ψf Ef d Pm Pg]T
A(x) =
ω
p1sen(2δ)−p2ω−p3ψfsen(δ) +p4Pm−p4Pv
p5cos(δ)−p6ψf+p7Ef d −Ef d
Te Pg−Pm
Tt −PgTg
(2.2) u= ue ug
,u∈R2
B= 0 0 0 0 0 0 ke Te 0 0 0 0 Tg1
12 CAPÍTULO 2. MÁQUINA SÍNCRONA
As saídas do sistema são:
y=
ψ f
δ
,y∈R2 (2.3)
As variáveisψf eδsão o fluxo concatenado no enrolamento de campo e o ângulo de
carga, respectivamente. As demais variáveis que compõem o vetor de estado x são: ω (variação do ânguloδ), Ef d (tensão no enrolamento de campo), Pm(potência mecânica) e
Capítulo 3
Redes RBF e a Estratégia de
Desacoplamento
Será introduzido brevemente neste capítulo o que são as redes neurais e suas aplica-ções. Será explicado como uma rede neural artificial é estruturada e para que objetivos ela será aplicada neste trabalho. O conteúdo da seção 3.1 será desenvolvido com foco princi-pal nas redes neurais baseadas em funções de base radial. Serão comentados os métodos de treinamento de uma rede neural e a eficiência deles na computação e ajustes em tempo real dos pesos sinápticos. Na seção 3.2, depois de conceituado o que vem a ser o controle adaptativo por modelo de referência, discutiremos a aplicação da rede RBF como estraté-gia de controle e desacoplamento. Dentro da seção 3.3, serão dadas as motivações para as técnicas de desacoplamento existentes. Na seção 3.4 e nas demais seções restantes deste capítulo, a alternativa ao desacoplamento será tratada, onde serão apresentadas a estrutura do desacoplamento, o projeto da rede RBF e o controle do sistema não linear.
3.1
Redes de Funções de Base Radial
O final da década de 80 marcou um período de crescente interesse na área de Re-des Neurais Artificiais (RNAs), também conhecidas como conexionismo ou sistemas de processamento paralelo e distribuído. Essa forma de computação não-algorítmica é ca-racterizada por sistemas que, em algum nível, lembram a estrutura do cérebro humano.
As RNAs são sistemas paralelos distribuídos compostos por unidades de processa-mento simples (nodo), que calculam determinadas funções matemáticas e estas são geral-mente não lineares. Tais unidades são dispostas em uma ou mais camadas e interligadas por um grande número de conexões, geralmente unidirecionais. Na maioria dos modelos, estas conexões estão associadas a pesos, os quais armazenam o conhecimento represen-tado no modelo e servem para ponderar a entrada recebida por cada neurônio da rede [Braga et al., 2000].
14 CAPÍTULO 3. REDES RBF E A ESTRATÉGIA DE DESACOPLAMENTO
Functions). Esse nome se deve à utilização pelos nodos ou centros da camada
interme-diária, de funções de base radial. Os nodos das camadas intermediárias das redes do tipo percéptron de múltiplas camadas- MLP (Multi Layer Perceptron) utilizam, geralmente, funções sigmoidais.
As funções de base radial são usadas para realizar uma transformação de um espaço de menor dimensão para um de maior dimensão, e isso torna possível alcançar uma aproxi-mação da função desejada, escolhendo adequadamente todos os parâmetros da rede RBF. Essa característica aproximativa já foi bastante apresentada na literatura [Chen e Khalil, 1991, 1990]. Muitos trabalhos exploram tal capacidade das redes RBF obtendo excelentes resultados. Um trabalho de identificação de sistemas apresentou o método de decompo-sição ortogonal própria, ou análises de componentes principais, combinada a uma rede RBF aplicada à identificação de sistemas caóticos [Mokhasi e Rempfer, 2010].
A construção de uma rede RBF, em sua forma mais básica, envolve três camadas (Figura 3.1) com papéis distintos. A camada de entrada é constituída por nodos de fonte (unidades sensoriais) que conectam a rede ao seu ambiente. A segunda camada, a única camada oculta da rede, aplica uma transformação não linear do espaço de entrada para o espaço oculto. A camada de saída é linear, fornecendo a resposta da rede ao padrão (sinal) de ativação à camada de entrada .
Figura 3.1: Estrutura Básica de uma Rede RBF
3.1. REDES DE FUNÇÕES DE BASE RADIAL 15
Tabela 3.1: Tipos Comuns de Funções de Base Radial Função Guassiana: f =exp
−kxRBF−ckk2
2σ2k
Função Multiquadrática: f =qkxRBF−ckk2+σ2k
Função Thin-Plate-Spline: f =kxRBF−ckk2logkxRBF−ckk
Os parâmetros de uma função de base são:
• xRBF- sinal de entrada da rede RBF. • ck- coordenada do centro ou nodo k. • σk- espalhamento da função de base radial.
• k - índice do centro ou nodo da camada oculta.
Dependendo do caso, convém utilizar uma ou outra função de base. Comumente, as funções do tipo Gaussianas são mais utilizadas, embora existam casos em que a utilização de outro tipo rendeu melhores resultados. No trabalho de Lian e Zak [2009], foi usada uma função de base denominada raised-cosine, pela vantagem de proporcionar menor tempo computacional, em uma estratégia de controle, baseada na mudança da estrutura de uma RBF.
O aprendizado de uma rede RBF é equivalente a ajustar uma superfície não linear ao conjunto de dados, em um espaço multidimensional, usando algum critério de otimiza-ção. O processo de generalização equivale a usar esta superfície multidimensional para interpolar outros pontos que não pertençam ao conjunto de treinamento, mas estejam em sua vizinhança. Através dos neurônios da camada escondida de uma rede neural RBF forma-se uma base arbitrária no espaço de alta dimensão, cujo conjunto de entrada pode ser expandido. Cada uma destas funções é centrada em uma coordenada ck particular do
espaço multidimensional dos pontos que compõem o espaço de dados de entrada. Cada uma destas coordenadas particulares caracteriza-se por definir o centro de uma região de maior aglomeração de pontos, ou cluster, do espaço de dados de entrada.
O parâmetroσcontrola o raio de influência de cada função de base. Este fator é par-ticularmente evidente no caso da função Multiquadrática inversa e da função Gaussiana, em que ambas as funções são, além de localizadas, monotonicamente decrescentes. O parâmetroσdetermina o quão rapidamente o valor da função de base radial cai a zero, à medida que o dado de entrada se afasta do centro da função de base.
O procedimento para a implementação de uma rede neural RBF compreende a de-terminação, através de um processo de aprendizagem, dos valores adequados para os parâmetros livres da RBF, que são a quantidade de centros na camada oculta, os espalha-mentosσ’s, os centros ou nodos ck e os pesos sinápticos. O aprendizado ou treinamento
consiste em determinar esses parâmetros de tal forma que, dado um conjunto de estímulos
xRBF na entrada, as saídas f se aproximem ao máximo do conjunto de valores desejados.
sináp-16 CAPÍTULO 3. REDES RBF E A ESTRATÉGIA DE DESACOPLAMENTO
ticos, enquanto que o método do Gradiente Estocástico pode ser aplicado na atualização dos pesos da rede RBF, dos espalhamentos e dos centros das funções de base radial.
Na ótica dos sistemas de controle, o modo de treinamento em tempo real deve possi-bilitar a implementação de uma rede para aplicação prática. Uma rede para este fim, que se ajusta conforme o sistema se desenvolve no tempo, além de aproximar a função desco-nhecida adequadamente, deve também fazer isso de maneira tão rápida quanto necessária. Não é principalmente importante o quão bem uma rede neural aproxima funções, pois se o ajuste for em tempo real a rede pode não render os resultados esperados, por exigir muito tempo para tal tarefa. Se pudermos diminuir ao máximo o custo computacional, torna-remos ainda mais viável sua utilização como uma técnica de controle robusto na prática. De fato, ainda exige-se alto custo em processamento para treinar certos tipos de redes neurais, como, por exemplo, as redes MLPs com muitas camadas e neurônios ocultos. A rede RBF pode ser mais rápida em convergência quando comparada a MLP com muitas camadas e, dessa forma, pode ser uma melhor escolha na área de controle. A literatura mostra alguns algoritmos de treinamento online para redes RBF que aceleram muito a convergência, como baseados em lógica fuzzy [Sarimveis et al., 2002], ou
backpropaga-tion [Ni e Song, 2007]. Além do custo computacional reduzido, a rede RBF favorece nas
provas de estabilidade do sistema. Como a camada de saída da rede é combinação linear dos sinais da camada oculta, a prova de estabilidade é bastante simplificada. A mesma ca-racterística pode ser conseguida com a rede MLP com saída linear. No entanto, a prova de estabilidade pode ser mais complicada conforme o número de camadas ocultas aumenta e o tipo de função de ativação utilizada pelos nodos dessas camadas.
Geralmente, o treinamento de uma rede neural é offline e ocorre através de métodos de otimização como gradiente e mínimos quadrados. O treinamento ocorre com base numa função de custo do tipo quadrática, que se deseja minimizar através do ajuste dos parâmetros da rede. Essa função de custo depende do erro entre a saída real e a desejada. Depois de aplicar os exemplos de treinamento na rede e os pesos serem ajustados, começa-se a etapa de validação, que começa-serve para verificar começa-se a rede neural teve um bom aprendizado. Ela é validada injetando na camada de entrada, valores diferentes dos aplicados durante o treinamento. A rede mostra o quão bem ela foi treinada, através do seu desempenho e capacidade aproximativa. Existe a possibilidade de executar esse processo em tempo real. Mas, em ambos os casos, deve-se ter o cuidado para evitar mínimos locais na superfície de aprendizagem.
O processo de treinamento que se pretende utilizar neste trabalho utiliza uma lei de adaptação derivada do método de Lyapunov, que utiliza funções de energia associada ao sistema. A grande simplicidade nesse processo é vista na implementação da rede RBF. O uso em tempo real das leis de adaptação desenvolvidas pelo método de Lyapunov é muito favorável, devido ao fácil processamento computacional. A análise por Lyapunov permite verificarmos se a convergência é garantida, em que circunstâncias ela ocorre e se é estável diante de situações arbitrárias.
3.2. REDE RBF E O MRAC 17
desenvolvimento das leis de adaptação, mas a convergência pode não acontecer adequa-damente, inclusive gerando dificuldades maiores na etapa de treinamento.
As funções de base do tipo gaussiana são utilizadas na estratégia de desacoplamento do gerador neste trabalho. Elas favorecem na robustez do sistema devido sua caracterís-tica decrescente. Isso pode ser aproveitado na técnica de controle e desacoplamento, pois nos sistemas de controle adaptativo típico, a presença de perturbações ou ruídos de me-dições causam aumento descontrolado dos sinais de saída do sistema. A realimentação desses sinais faz com que os parâmetros do controlador intensifiquem ainda mais esse aumento, provocando a instabilidade. No caso das funções gaussianas ou outras funções similares, a camada oculta tem uma ação vantajosa. Se os sinais de saídas são realimenta-dos como entradas da camada da rede RBF, a resposta da camada oculta limita o aumento dos sinais de saída. Conforme será visto em mais detalhes mais adiante, quando os sinais de saída crescem, temos que os argumentos das funções gaussianas também crescem e, consequentemente, a função exponencial decresce. Quanto mais os sinais de saída ten-dem a crescer, afastando-se do centro da função de base, menor será a resposta da camada oculta da rede (Observe a equação 3.2), e assim, a saída da rede é uniformemente limitada. Como a saída da rede RBF fornece os sinais de controle para o sistema, as saídas tendem a permanecer uniformemente limitadas, evitando a perda de estabilidade. Será mostrada na prova de estabilidade uma análise mais detalhada dessa característica (Capítulo 4).
3.2
Rede RBF e o MRAC
18 CAPÍTULO 3. REDES RBF E A ESTRATÉGIA DE DESACOPLAMENTO
O controle adaptativo por modelo de referência (MRAC) é um padrão nas estratégias de controle adaptativo. Ao longo dos últimos anos, muitos pesquisadores têm procurado desenvolver algoritmos que possam contribuir mais para a melhoria do desempenho desse tipo de controle. Certas contribuições deram ao controle maior robustez. Algumas contri-buições conhecidas foram modificações nas leis de adaptação, como normalização, fator de esquecimento e projeção. Outras modificações incluem estrutura variável no controle, baseada nos controladores à relé. Tal estratégia melhora o transitório característico lento do MRAC e garante robustez e estabilidade assintótica. Tem-se inclusive a aplicação de estrutura variável no controle de um gerador síncrono [Fernandes, 2008].
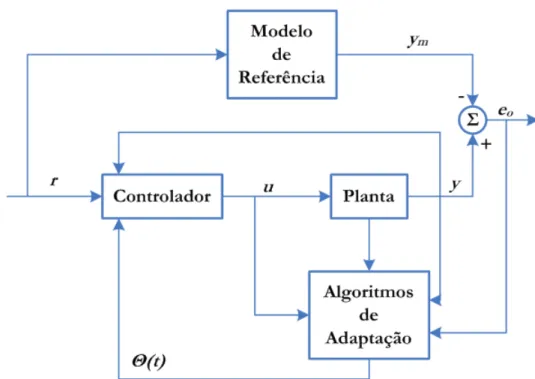
O controle adaptativo por modelo de referência constitui-se basicamente de um con-trole com parâmetros adaptáveis, leis de ajustes para esses parâmetros (algoritmos de adaptação) e realimentação de sinais provenientes do sistema controlado (Figura 3.2). Com o uso desses sinais, é possível ajustar esses parâmetros tornando o conjunto como um todo, o controlador mais a planta do sistema, semelhante a um modelo de referência proposto, ou seja, a dinâmica e desempenho do sistema será igual à dinâmica e desempe-nho do modelo de referência escolhido.
Uma grande vantagem do controle adaptativo é o fato de não precisarmos conhecer a fundo todos os parâmetros envolvidos em um modelo matemático do processo. O contro-lador com o passar do tempo ajustará seus próprios parâmetros até se estabelecerem em valores adequados. Assim, o controle produzirá um sinal capaz de fazer o erro e0 entre
a saída do modelo de referência e a saída da planta convergir para zero. Embora isso seja matematicamente provado, não garantimos que o sistema permanecerá sempre nesse estado. A presença de dinâmicas não-modeladas, devido às linearizações no modelo e presença de perturbações nos sinais de medição, causam instabilidade no controle [Rohrs et al., 1985]. Esse problema é resolvido se além de garantirmos que o erro e0convirja para
zero, também garantirmos que os parâmetros caminhem para os seus valores corretos. Uma alternativa também é a introdução de uma rede neural. Assim, teremos a natureza estável e robusta da rede agregadas ao controle adaptativo. Usando uma rede neural, a prova de estabilidade tornar-se-á mais complexa, mas utilizando, como já comentado, uma rede RBF, pode-se simplificar bastante o processo matemático. Uma maneira de implementar o controle pode ser vista nos diagramas de controle em que a rede RBF substituirá o controlador na Figura 3.2, ficando como no diagrama da Figura 3.4.
3.3
Desacoplamento de Sistemas
pro-3.3. DESACOPLAMENTO DE SISTEMAS 19
cesso é muito mais fácil de manipular matematicamente, mas com muitas restrições no controle. A aplicação de uma técnica mais apurada pode permitir maior liberdade no pro-jeto dos sistemas de controle. Outros problemas que uma técnica moderna pode enfrentar com maior sucesso são: as mudanças do ponto de operação; o baixo rendimento no caso dos geradores, por causa das altas margens de segurança; e robustez às incertezas e às perturbações.
Existem diferentes modos de tratar os sistemas MIMO acoplados. Por exemplo, atra-vés dos algoritmos de inversão de sistemas. Dentre tantos existentes, podemos citar o método de inversão de Hirschorn [Hirschorn, 1979]. Com este método, encontra-se uma condição suficiente para a existência de um sistema inverso à direita1, para uma classe de sistemas não lineares, investiga-se a reprodutibilidade funcional e aplicando o algoritmo de inversão. Em outro artigo [Rebhuhn, 1980], temos o desenvolvimento de um método de inversão, para um caso em que o método de Hirschorn não é aplicável. Singh tam-bém aperfeiçoou o método de Hirschorn para a inversão de uma classe de sistemas não lineares, que não são do tipo de Hirschorn [Singh, 1981].
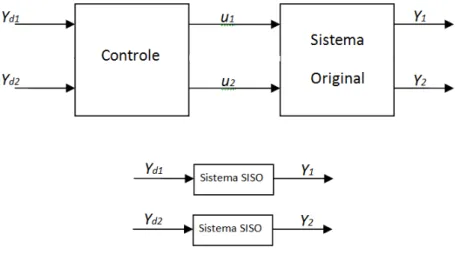
A proposta de desacoplamento, em termos comuns, é de fragmentar o sistema MIMO em vários sistemas SISO (Single Input and Single Output). Pode-se ver na Figura 3.3 o esquema de desacoplamento. Explicando o esquema, temos que o controle recebe o sinal de referência, yd1 ou yd2 e atua sobre as entradas do sistema MIMO original. O controle
aplica uma combinação de sinais de controle, que são u1 e u2, de maneira que apenas
a saída desejada, uma das variáveis y1 ou y2, seja alterada. Assim, o conjunto como um
todo se transforma em unidades de sistemas SISO, cada um com controles independentes.
Figura 3.3: Diagrama de Acoplamento/Desacoplamento
O trabalho de desacoplamento usando a rede RBF consiste em aplicá-la como o con-trole mostrado na Figura 3.3. A rede RBF se ajustará de modo que os sinais de concon-trole, aplicados no sistema MIMO, forcem cada uma das saídas a se comportar como um mo-delo de referência proposto.
1Um sistema inverso à direita, para um sistema S, é um sistema SD, o qual calcula a entrada requerida
20 CAPÍTULO 3. REDES RBF E A ESTRATÉGIA DE DESACOPLAMENTO
3.4
Estrutura de Controle e Desacoplamento
As funções de base radial são capazes de aproximar qualquer função não linear f :
Rn →Rd, dada certa precisão desejada [Park e Sandberg, 1991]. Seja n o número de entradas e d o número de saídas. No caso do modelo do gerador utilizado, temos que o número de saídas é igual ao número de entradas, ou seja, n=d.
A saída de uma rede RBF é dada por:
fi(wi) =ΣNk=1wikgk (3.1)
em que,
• N - é a quantidade de nodos ou centros da camada oculta da rede RBF.
• i= [1,···,n]- refere-se às saídas da rede RBF.
• k= [1,···,N]- refere-se aos centros da camada oculta da rede RBF.
• wi- vetor de pesos que liga a camada oculta à saída i.
Observamos em 3.1 que a saída da rede RBF é uma combinação linear das respostas
gkde cada centro k. Os pesos da rede wikponderam, enfatizando ou atenuando, cada uma
das respostas dos centros da camada oculta.
A função de base radial escolhida para a camada oculta da rede é a gaussiana (eq. 3.2). Essa função tem a vantagem de manter os sinais da camada oculta uniformemente limitados, independentemente dos valores de entrada xRBF.
gk=exp
−kxRBF−ckk2
2σ2k
(3.2)
em que,
• kk- norma euclidiana.
• xRBF - vetor de entrada da rede RBF.
• ck - vetor coordenada de um centro k da rede RBF. • σk- espalhamento de um centro k da rede RBF.
Cada centro da camada oculta possui dois parâmetros, que influenciam diretamente na capacidade aproximativa da RBF: a posição dos centros no espaço ck e o espalhamento
das gaussianas σk. Os ajustes desses parâmetros estão alheios a regras específicas, fi-cando inteiramente ao critério do caso em estudo. Assim, determiná-los pode ser difícil a princípio, exigindo certa experiência nos ajustes.
A forma vetorial da saída da RBF pode ser escrita como:
fi=wTig (3.3)
A Figura 3.4 mostra a estrutura geral de controle e desacoplamento utilizada. O con-trole é feito através da rede RBF, que aplica o sinal de concon-trole u no sistema MIMO. O vetor de entrada da RBF, xRBF, é composto pelos vetores ere f e as respostas dos filtros v.
3.4. ESTRUTURA DE CONTROLE E DESACOPLAMENTO 21
Figura 3.4: Estrutura de Controle e Desacoplamento
Seja o vetor de erro entre as saídas do sistema e as saídas do modelo:
e= [e1e2e3 ···en]T
em que ei=yi−ymi, a diferença entre a saída i do modelo e a saída i do sistema.
O sinal de referência e o erro:
r= [r1r2r3 ··· rn]T
ere f = [ere f 1ere f 2ere f 3 ··· ere f n]T
em que ere f i =ri−yi, é o erro entre cada sinal entrada de referência i e cada saída i do
sistema.
As saídas da rede RBF são definidas como:
u= [u1u2u3 ··· un]T
Usando a equação 3.3, o sinal de controle é computado como:
ui= fi ⇒ ui=wTi g
Portanto, cada saída da rede RBF fi será aplicada a uma entrada do sistema ui,
con-forme a equação 3.4
ui=wTi g (3.4)
Sejam as saídas do sistema MIMO:
22 CAPÍTULO 3. REDES RBF E A ESTRATÉGIA DE DESACOPLAMENTO
As saídas dos modelos de referência:
ym= [ym1ym2ym3 ··· ymn]T
Sendo,
ymi=
Z Pri
em que ZP é uma função de transferência estável com grau relativo n∗=1. Isso tem por objetivo satisfazer a condição de uma função estritamente real positiva (ERP2) para a convergência do erro entre o modelo de referência e a saída da planta [Goodwin e Mayne, 1987].
3.5
Filtros de Entrada
No controle adaptativo, para realizar a convergência de certa quantidade de parâmetros adaptativos, devemos estimular o sistema também com certa quantidade de sinais. Se pensarmos nos parâmetros como incógnitas de um sistema de equações, quanto mais equações, mais informações teremos para encontrar os valores dessas incógnitas. As informações, no controle adaptativo, são fornecidas pelos sinais de saída do sistema. Mas, caso o número de variáveis de saídas medidas seja pequeno, empregam-se filtros que produzam esses sinais adicionais.
De modo similar nas redes neurais RBF, também é necessária uma quantidade sufici-ente de sinais para estimular os pesos da rede RBF a uma convergência adequada. Assim, a camada oculta da rede RBF responde através do vetor g, e esse deve ser estimulado por uma quantidade apropriada de sinais de entrada. Os sinais adicionados são os sinais filtrados das medições das saídas do sistema MIMO.
O número de sinais no controle convencional depende da ordem do modelo lineari-zado do sistema. Isto é, se a planta tiver ordem p, o sinal de controle aplicado deve ter 2p sinais distintos [Ioannou e Sun, 1996], e, dessa forma, agrega-se mais informações para fazer os parâmetros do controle adaptativo convergirem adequadamente. Por exemplo, para uma planta de ordem 2, o vetor de sinais no controle adaptativo será composto de re-ferência de entrada, sinal de saída, sinal filtrado de entrada e sinal filtrado da saída. Esses sinais formam o vetor regressor (ωMRAC). Cada um desses sinais é ponderado por
parâ-metros adaptativos, quatro parâparâ-metros no total, formando o vetor θ. O sinal de controle tem o formato conforme 3.5.
umrac=θTωMRAC= [θ1 θ2 θ3 θ4]
uf iltrado
ysaida
yf iltrado
rre f erencia
(3.5)
2Uma função de transferência é ERP quando esta é estritamente estável, ou seja, todos os pólos tem
3.5. FILTROS DE ENTRADA 23
Para que θ convirja para os valores corretos, ωMRAC precisa ser rico em frequência.
Um sinal rico em frequência possui energia distribuída em diferentes direções para esti-mular os parâmetros, levando-os a convergir para os valores corretosθ∗. Para queωMRAC
tenha tal característica são adicionados componentes de frequências distintas no sinal de referência de entrada rre f erencia. Mas este tipo solução é impraticável em certos casos,
visto que essas componentes causam oscilações na planta. Se os parâmetros não con-vergirem para os corretos, o sistema pode se instabilizar na presença de dinâmicas não modeladas e perturbações. Para casos em que rre f erencia não possa receber componentes
de diferentes frequências, pode-se aplicar algoritmos robustos de adaptação.
Comparando o formato da equação do sinal de controle do MRAC com o da rede RBF, pode-se perceber que a equação 3.5 é similar a 3.4, exceto pelo vetor regressor ωMRAC,
que na rede RBF é g, que é um vetor composto pelas respostas da camada oculta da rede. Seguindo o mesmo raciocínio, g precisa conter energia em muitas direções para estimular o sistema. Um sinal suficientemente rico em frequências apresenta tal característica e é conhecido como um sinal persistentemente excitante, ou sinal PE3. Assim, o vetor g deve ter sinais suficientes para estimular o sistema de modo adequado, fazendo os pesos da rede RBF convergirem adequadamente. Assim, precisa-se determinar quantos filtros usar na rede RBF e como tornar g o mais persistentemente excitante possível, para estimular o sistema a diversos estados diferentes.
Seguindo como referência o que foi proposto por Dai et al. [2001], podemos deter-minar a quantidade de filtros para a rede RBF. No artigo, o autor faz o desacoplamento através de uma rede MLP, sendo utilizadas as saídas do sistema e sinais provenientes de integradores em cascata, como entradas da rede MLP. A quantidade de integradores depende da ordem de inversão da saída do sistema. Se a saída é de ordem de inversão 2, então são utilizados dois integradores. Cada um desses integradores fornece um sinal adicional à rede MLP.
Obviamente, num sistema real não temos as equações para sabermos a ordem de inver-são de cada saída do sistema. Logo, projetar a quantidade de filtros pode ser uma questão de experiência, juntamente com um pouco de conhecimento do sistema estudado. Como o sistema do gerador usado neste trabalho é baseado num modelo matemático, pode-se ter idéia da ordem de inversão de cada saída. Na equação 2.2, mostrada no capítulo 2, temos as variáveis de estado da máquina síncrona. As saídas do sistema são o ângulo de carga (δ) e o fluxo concatenado (ψf), estas saídas são comandadas pelas entradas,
uge ue, respectivamente. Escrevendo a equação do ângulo e do fluxo na forma de
equa-ções diferenciais, deixando cada uma das saídas explicitamente em função de sua entrada, pode-se encontrar a ordem de inversão de cada uma das saídas, verificando a ordem da derivada de cada uma das expressões. Assim, temos que o ângulo é uma equação não linear diferencial de quarta ordem; e o fluxo de segunda ordem. Para os casos em que não tenhamos conhecimento do sistema para determinar-se a quantidade de filtros, pode-se experimentalmente adicionar filtros até atingirmos a quantidade necessária para um bom desempenho da rede RBF.
Os filtros são organizados em cascata, de modo que, a saída de cada filtro tanto vai para
3Outros trabalhos também explicam o conceito de sinal persistentemente excitante e sua influência na
24 CAPÍTULO 3. REDES RBF E A ESTRATÉGIA DE DESACOPLAMENTO
o próximo filtro como para a entrada da rede RBF, conforme a Figura 3.5. Se chamarmos deαi, a ordem da derivada da saída i, temos que, cada saída é filtrada pelo menosαivezes
[Dai et al., 2001].
Figura 3.5: Esquema dos Filtros dos Sinais de Saída
Sejam os filtros dados por:
v= [v1···α1 v((α1+1)···α2) v((α2+1)···α3) ··· v(α(n−1)+1)···αn] T
A notação v1···α1 refere-se a v1 v2 v3 ··· vα1.
O número total de sinais filtrados, ou a dimensão do vetor v, é dado por dim(v) =
α1+α2+···+αn, em queαi é o grau da derivada da saída i. Para o caso em estudo, o
gerador síncrono, os filtros projetados são de primeira ordem, conforme 3.6:
Gf iltro=
0,01
s+0,01 (3.6)
Dessa forma, podemos determinar a dimensão dos vetores de entrada dim(xRBF)e a
dimensão do vetor de coordenadas de cada centro da camada oculta dim(ck), usando 3.7.
3.6. CENTROS E ESPALHAMENTOσ 25
Como comentado, exigem-se duas vezes a ordem do sistema para a quantidade de sinais de entrada. Temos que número de sinais do vetor xRBF deve ser pelo menos oito, o
que é duas vezes a ordem da equação diferencial do ângulo, e é mais do que duas vezes a ordem da equação diferencial do fluxo. Sendo assim, projetaram-se quatro filtros para a saída do ângulo, e para o caso da saída do fluxo foram projetados dois filtros. Portanto, pelos critérios propostos, o número de sinais é adequado. Assim, a entrada da rede xRBF
é dada por:
xRBF= [ere f 1ere f 2v1v2v3v4v5v6]T
3.6
Centros e Espalhamento
σ
Ainda sobre o projeto da rede RBF, precisa-se definir a quantidade de centros da ca-mada oculta, e para isso, avaliou-se o desempenho da rede RBF através das simulações. O procedimento foi o seguinte: começando com uma quantidade de centros e observando os resultados, verificou-se a necessidade de aumentar, ou não, o número de centros usados, dependendo do comportamento do sistema e do quão bem ele acompanha o modelo de referência, assim, selecionou-se o melhor número de centros. Depois de algumas simu-lações, vinte centros ofereceram bons resultados. Essa quantidade não indica que valores maiores não produziriam resultados melhores, mas a quantidade escolhida foi adequada e não exige muito tempo de processamento nas simulações.
Cada centro é posicionado no espaço de entrada através do vetor de coordenada ck.
No início da simulação, são atribuídas posições aleatórias a cada um dos centros. Cada coordenada do vetor ckrecebeu um valor dentro de uma faixa, que abrange as amplitudes
dos sinais de entrada da rede RBF, no intervalo[0 1.5]. Depois de fixadas, as coordenadas permanecem constantes durante toda a simulação.
No caso do espalhamento das funções gaussianas, podem-se comentar os critérios usados. O valor do espalhamentoσpode ser escolhido através da fórmula 3.8. A variável
dmax é a distância máxima entre dois centros escolhidos e N é a quantidade de centros.
Essa fórmula faz com que as funções de base radial não sejam pontiagudas demais e nem planas demais. No entanto, nas simulações a adaptação dos pesos foi comprometida usando essa técnica, prejudicando a aproximação realizada pela rede RBF. Assim, optou-se por sintonizarσ=0.1, permanecendo este valor constante.
σ= √dmax
2N (3.8)
![Figura 2.1: Esquema da Máquina Síncrona [Anderson e Fouad, 1994]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15556048.98126/23.892.154.700.175.549/figura-esquema-da-máquina-síncrona-anderson-fouad.webp)