PROCESSAMENTO DE SINAIS PARA
INSPEÇO DE CORROSO EM DUTOS
POR PIG ULTRASSÔNICO USANDO
FILTRO CASADO
PROCESSAMENTO DE SINAIS PARA
INSPEÇO DE CORROSO EM DUTOS
POR PIG ULTRASSÔNICO USANDO
FILTRO CASADO
DissertaçãoapresentadaàEsolaPoliténia
daUniversidade de SãoPaulopara obtenção
do Título de Mestre em Engenharia
Meâ-nia.
PROCESSAMENTO DE SINAIS PARA
INSPEÇO DE CORROSO EM DUTOS
POR PIG ULTRASSÔNICO USANDO
FILTRO CASADO
DissertaçãoapresentadaàEsolaPoliténia
daUniversidade de SãoPaulopara obtenção
do Título de Mestre em Engenharia
Meâ-nia.
Áreade onentração:
Engenhariade Controle eAutomação
Meâ-nia
Orientador:
Prof. Dr. Celso Massatoshi Furukawa
Este exemplar foi revisado e alterado em relação à versão original, sob
responsabilidade única do autor e com a anuência de seu orientador.
São Paulo, 24 de maio de 2010.
Assinatura do autor _____________________________________
Assinatura do orientador _________________________________
FICHA CATALOGRÁFICA
Canales, Ramon Vieira
Processamento de sinais para inspeção de corrosão em
dutos por PIG ultrassônico usando filtro casado / R.V. Canales.
-- ed.rev. -- São Paulo, 2010.
144 p.
Dissertação (Mestrado) - Escola Politécnica da Universidade
de São Paulo. Departamento de Engenharia Mecatrônica e de
Sistemas Mecânicos.
Não posso deixar de omeçar estes agradeimentos pela pessoa responsável pela minha
riação,pormedarapossibilidadedetrilharosaminhosqueeuquisesolher,porsempre
termeapoiado,eporter meensinadotudo quefoipreisopara aminharsozinho,minha
mãe. Também agradeço à todos os meus familiares, ao menos os que sabem que z
mestrado.
Agradeçoàminhaompanheira(esperoqueparavidainteira),MarelaFanti,queme
dáforças quando preiso, que meatura e que ompartilha os bons e maus momentosda
vida.
Seguindo, agradeçoaomeuorientador,CelsoFurukawa,quemeguioudesdeoomeço
dafauldade,ompartilhandoseuonheimentoeexperiênia,equepossibilitouquehoje
eu metornasse um mestre emEngenharia.
Agradeço às instituições que possibilitaram este trabalho: ao CNPQ (pela bolsa de
estudo,semaqualeunãoteriasobrevividoestesanos),aoCENPES/Petrobras ePipeway
(peloapoioténio) e à FINEP (peloapoionaneiro, onvênio
n
o
01.05.0823.00).
Agradeçoatodososmeus amigos,quedeuma formaoude outraestiveram presentes
duranteeste trabalho.
E lógio, agradeço à voê, que investiu tempo lendo estas palavras, e que
provavel-mente investirá muito mais lendo orestante deste trabalho!
Por último, muito obrigado a Deus, Poseidon, Thor, Bao, Amon-RÁ, Tupã, O
Este trabalho desreve o desenvolvimento de um algoritmo para a avaliar o grau de
or-rosão em paredes de oleodutos, através de ultrassom. O algoritmo desenvolvido será
implementado em um iruito digital, fazendo parte de um sistema que poderá ser
em-barado em pigs ultrassnios para inspeção de dutos à proura de orrosão. O modelo
matemátio onheido omo ltro asado é usado omo base do algoritmo, além de um
métododedeteção de piosparaloalizaçãodos sinaisdeeo de ultrassom,provenientes
dasreexõesdosinalnasparedesdosdutos. Umdosproblemaséadeniçãodosinal(edo
ltro)que será utilizado,mas por meiode sinais sintetizados (signal design)uma grande
gama de alternativas foi analisada e apenas algumas foram seleionadas para testes em
experimentos. Por último os melhores sinais foram utilizados na inspeção de um orpo
de prova feito à partir de um duto orroido, e os resultados são analisados. A deteção
daprimeira parede do oleoduto apresenta resultados promissores emomparação om a
mediçãotridimensional das mesmas paredes. O sistema foi apaz de reonstruir o perl
daparede interna do duto om elevada verossimilhança, mesmo em regiões severamente
orroídas. A deteção da segunda parede apresenta resultados satisfatórios para baixos
níveis de orrosão, porém alguns problemas foramenontrados para níveismais altos de
orrosão, prejudiando amedição diretada espessura daparedenestas ondições.
Palavras-have: Pig ultrassnio, Inspeção não destrutiva por ultrassom, DSP em
Signal proessingfor orrosion assessment in pipelineswith ultrasound PIG using
mathed lter
Thiswork desribesthe developmentofanalgorithmthatuses ultrasoundtoevaluate
the degree of orrosion in pipeline walls. The developed algorithm was implemented in
adediated digital iruit that an be embedded inultrasoni pigs for pipeline orrosion
inspetion. The algorithm is based on the mathemati model known as mathed lter.
It also inorporates a peak detetion method for the loalization of ultrasound ehoes,
originated from the signal reetions in the pipeline walls. One of the problems is the
determination of the signal (and lter) that should be used, but using a signal design
approah,a large number of possibilitiesould be analyzed sothat onlya few had to be
tested inexperiments. Finally, the best signals were used to inspet a sample made of a
orroded pipeline setion, and the results were analyzed. The detetion of the rst wall
showed promisingresults when ompared tothe results of a tridimensionalinspetion of
the same walls. It was possible to reonstrut the prole of the internal wall with good
likelihood,even inbadly orroded areas. The detetion of the seond wall showed some
satisfatoryresultsonloworrosionlevels, butshowed someproblemswithhighorrosion
levels, ompromising the diret measurementof the pipeline wallthikness.
Keywords: Ultrasoni pig, Ultrasoni non-destrutive testing, Real-time DSP,
Lista de Figuras
Lista de Tabelas
Lista de Abreviaturas
1 Introdução 18
1.1 Contextualização eMotivação . . . 18
1.2 Objetivos . . . 19
1.3 Desrição do Trabalho . . . 20
2 Revisão Bibliográa 22 2.1 Pigs . . . 22
2.2 Tratamento estatístio . . . 23
2.3 Proessamento Digital . . . 24
2.4 Filtro Casadoe Código de Barker . . . 26
3 Aspetos Teórios 29 3.1 Ultrassom . . . 29
3.1.1 Os sinais de Ultrassom . . . 29
3.1.2 A reexão das ondas . . . 30
3.2.1 Sistema Embarado - FPGA . . . 38
3.2.2 Proessamento Digital . . . 39
3.3 Algoritmos matemátios . . . 39
3.3.1 Estimação doTOA . . . 39
3.3.2 Filtro Casado . . . 41
3.3.3 Códigos de Barker . . . 45
3.3.4 Comparação doerro entre duas medidas . . . 49
3.4 Os problemas dainspeção por ultrassom . . . 50
3.4.1 Critério . . . 52
4 Metodologia 53 4.1 Cálulo doTempo de Inspeção . . . 53
4.2 Exitação dos Transdutores . . . 55
4.2.1 Potêniaenviada . . . 58
4.2.2 Códigos de Barker e número de ilos . . . 60
4.2.3 Deteção de Pios . . . 67
4.3 Sistema Proposto . . . 69
4.3.1 Plaa Pulsadora . . . 75
5 Testes reais 77 5.1 Primeira etapa . . . 77
5.1.1 Corpo de Prova 1 . . . 78
5.1.2 Resultados . . . 78
5.2.3 Inspeção ultrassnia . . . 84
6 Resultados 86 6.1 Método de omparação . . . 86
6.2 Medição daPrimeira Parede . . . 87
6.2.1 Prinipais problemas dainspeção . . . 90
6.3 Medição daSegunda parede . . . 94
7 Conlusão 102 7.1 Trabalhos Futuros. . . 105
Referênias 107 Anexo A -- Código MATLAB do Detetor de pios loais 111 Anexo B -- Esquemátios do Sistema Digital 113 B.1 TOP . . . 114
B.2 MEMORIA . . . 115
B.3 MEMORIA PICOS . . . 116
B.4 M8 . . . 117
B.5 IRQBUF . . . 118
B.6 IOBUF8 . . . 119
B.7 FILTRO . . . 120
B.8 DETECTOR QUADRATURA. . . 121
B.9 DETECTA TRIGGER . . . 122
C.2 Contador Sinal . . . 126
C.3 Controle Aq . . . 127
C.4 Controle Dete . . . 128
C.5 Delay Aq . . . 129
C.6 Detetor Pio . . . 131
C.7 Endereçador . . . 132
C.8 Filtro Casado . . . 133
C.9 OBUS MUX . . . 136
C.10Prog Register . . . 137
C.11Salva Sinal. . . 140
2.1 Em (a) imagem de um pig ultrassnio, e em (b) uma gura om seus
prinipaisomponentes . . . 23
3.1 a) Propagaçãoda onda longitudinale b) Propagaçãoda onda transversal . 30
3.2 Reexão e Transmissão de uma ondaaústia . . . 30
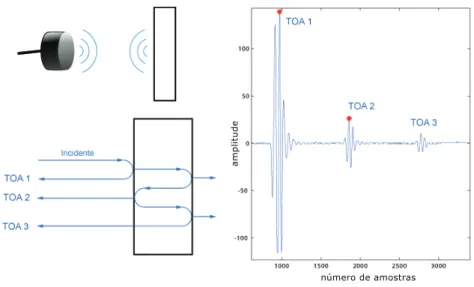
3.3 Envio ereebimentodos eos dosinalde ultrassom,e seus respetivos TOAs 32
3.4 Sinaisde eoobtidosemágua,(a) geradoporumaplaade alumínioplana
e polida; e (b) geradoem regiãoorroída daplaa . . . 32
3.5 Modelo simpliadode um transdutor de ultrassom . . . 34
3.6 Em (a)um transdutor não-foalizado,e em(b) um transdutor foalizado . 36
3.7 Em (a) o transdutor não foal está dentro do ampo de ondas reetidas
por uma superfíie irregular,o que não aontee em(b) om o transdutor
foalizado . . . 37
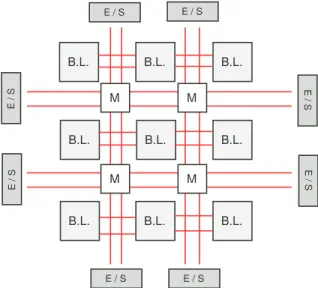
3.8 Estrutura interna simpliada de uma FPGA. E/S - bloos de entrada e
saída, B.L. - bloos lógios eM - matrizesde interonexão . . . 38
3.9 Em(a)osinalonheido,eem(b)omadiçãoderuídobrano,diultando
a determinaçãodoTOA . . . 40
3.10 Exemplo da saídade um sistema linear . . . 43
3.11 Em a)tem-seo sinal original,emb)sua inversão notempoe esaladopor
umfator
k
,eem)apliandoumatrasoA
tem-seafunçãodetransferêniado ltro ausal . . . 44
3.12 Em(a)osinal emmeioaruídoeomum atrasodesonheido (otraejado
mostra o sinal original) e em (b), a saída do ltro asado, om o pio
ódigo binário (
0
o
para ódigo 1 ou
180
o
para ódigo -1) . . . 46
3.14 Uma função de orrelação ideal . . . 47
3.15 Código de Barker om (a)3 bits; e (b) 7 bits . . . 48
3.16 Auto orrelaçãodos ódigos de Barker om (a)3bits; e(b) 7bits . . . 48
3.17 Sinal enviadosofre interferênias domeio ema), edepoisé orrelaionado onsigomesmoemb),resultandoemumpiodistintomostrandoaposição do sinal, om um atraso xo . . . 49
3.18 Exemplo de onda de exitaçãoom 3bits, 2 ilos porbit. . . 49
3.19 Em(a), a dispersãoque pode ser ausada pelaorrosão, e em(b) um aso onde um eo lateralhega no transdutor antes do eo dopontoabaixo do mesmo . . . 51
4.1 Representaçãodopigduranteumainspeçãodentrodooleoduto. Asehas laras indiam osinal sendo enviadoe reebido pelotransdutor. . . 54
4.2 Função deTransferêniadoTransdutor ALPHA: (a)nodomíniodotempo e; (b) densidade espetral de potênia . . . 56
4.3 Comparação entre sinal real e sinal sintetizado por omputador, no aso de 2 bits e 8 ilos por bit. Sinal no tempo: (a) Real e (b) Sintetizado. Densidade Espetral de Potênia: () Real e(d) Sintetizado. . . 57
4.4 Sinal real odiado que exita o transdutor (7 bits, 1 ilo por bit). (a) Sinal real e (b) sinal utilizadonas simulações. . . 57
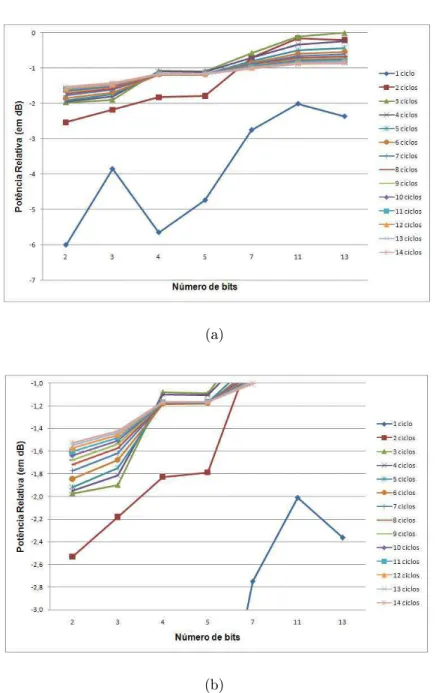
4.5 Transmissão de potênia relativa ao maior valor, em dB, para: (a) todos os sinais e,(b) apenas ossinais dentrodo limiteestabeleido . . . 59
4.6 A onda de exitaçãoé onvoluída om osinal de eo padrão,eo resultado montado emum sinalmaior omdistânia
d
ecos
. Por m adiiona-seruído brano gaussiano. . . 617 ilos. Os erros são expressos em porentagem em relação ao valor de
espessura pré-determinado nasíntese dos sinais . . . 64
4.9 Saídas do ltro asado. 2 bits 4 ilos om (a) F8B e (b) F1B, e 2 bits 7
ilos om () F8B e (d) F1B . . . 64
4.10 Erros emporentagemna simulaçãodos ódigos. Em(a)todos os
resulta-dos eem (b) limitandonos erros menores que 2% . . . 66
4.11 Em (a) a sobreposição do sinal ausou muita ambiguidade na saída do
ltro, e o detetor de pios detetou o pio errado ("
×
"), ao invés doorreto,representadopor"
◦
". Em(b), mesmoom asobreposição,asaídado ltro émuito lara, resultando numa deteção orreta . . . 67
4.12 Parâmetros onguráveis nadeteção de pios . . . 68
4.13 Exemplododetetorde piosloais, resultandonaenvoltóriadosinal. São
detetadas as envoltórias positiva enegativa,poisno aso do segundo eo
proura-se opio negativo . . . 69
4.14 Diagrama de bloos simpliadodo sistemaimplementando naFPGA . . . 70
4.15 Exemplode umaonguraçãode umltroqualquer,om somadoresemsérie 73
4.16 Em a) o ltro de 2 bits, e suas respetivas amostras, e em b) o diagrama
representando a implementaçãodomesmo . . . 74
4.17 Diagrama de bloos daplaa pulsadora/reeptora . . . 76
5.1 Corpo de prova de alumínio, usinado omo uma esada om diversas
es-pessuras de degraus. (a) Imagem real e (b) suas dimensões . . . 78
5.2 (a)Sinal adquiridonainspeção doorpo de prova1,para o asode 7 bits,
2 ilos porbit, nodegrau de 10mm; e (b) Saída doltro, om piosbem
denidos, resultando num bomresultado nainspeção . . . 80
5.3 Saída do ltro asado para o aso de: (a) 7 bits, 1 ilos por bit e (b) 7
bits, 2 ilos por bit, ambosna espessura de 2 mm. . . 80
de testes . . . 82
5.6 Ciruito utilizado para o separador de sinais, om
R
1 = 100
K
Ω
e diodos rápidos 1N4148 . . . 825.7 Imagens daplaa utilizada omoorpo de prova nos experimentos . . . 83
5.8 Foto damáquinaBN710 da Mitutoyo . . . 83
5.9 Linhas esaneadas pela máquina3D, reproduzidasem MATLAB . . . 84
5.10 (a) Foto do sistema meânio; (b) Diagrama mostrando o sistema de ins-peção eo posiionamentodapeça aser esaneada . . . 85
5.11 Diagrama exempliandoo alinhamentovisualque foi feitodurantea ins-peção . . . 85
6.1 (a)Resultadosdasinspeçõessoltosnoespaço,e(b)resultadosomprimeiro ponto igualado . . . 86
6.2 (a) Resultados om diferença angular, e (b) resultados alinhados prontos para inspeção . . . 87
6.3 Comparação entre osresultados da primeiraparedepara a linhaD, om o ódigo 2 Bits, 3ilos . . . 88
6.4 Comparação entre os resultados daprimeiraparede para (a)linha A, om o ódigo 3 Bits,3 ilos, e (b) linha B, 7Bits, 1 ilo . . . 89
6.5 Onda de ultrassom reetindo nas paredes laterais de um pite, antes de hegar no fundo domesmo . . . 90
6.6 Doisexemplosondeopitenãofoiorretamentedetetado,apareendoomo um burao menor queo buraoreal . . . 91
LinhaA,2Bits,3Cilos;(b)LinhaB,3Bits,3Cilos;()LinhaD, 3Bits,
3 Cilos . . . 94
6.10 (a)Resultado dainspeção e (b) sinal para o ponto
23
mm
do omprimento 956.11 Sinal para o ponto
24
mm
do omprimento . . . 966.12 (a)Resultado dainspeção e (b) sinal para o ponto
23
mm
do omprimento 966.13 (a)Resultado dainspeção e (b) sinal para o ponto
51
mm
do omprimento 976.14 (a)Resultado dainspeção e (b) sinal para o ponto
60
mm
do omprimento 976.15 (a)Resultado dainspeção e (b) sinal para o ponto
30
mm
do omprimento 986.16 Sinal para o ponto
45
mm
do omprimento . . . 986.17 (a)Resultado dainspeção e (b) sinal para o ponto
37
mm
do omprimento 996.18 Sinal para o ponto
69
mm
do omprimento . . . 996.19 Simulação de deteção da segunda parede om uma janela variável de
tempo,om duração menor . . . 100
6.20 Inspeção da segunda parede da linha A para 3 ombinações de ódigos e
3.1 Códigos de Barker . . . 47
4.1 Códigos que serão simulados . . . 63
4.2 Códigos para os testes reais . . . 65
ASIC Appliation-SpeiIntegrated Ciruit
BPSK BinaryPhase Shift Keying
DSP Digital signal Proessing
FIR Finite Impulse Response
FPGA Field-Programmable Gate Array
GPS Global Positioning System
LIT Linear e Invariante no Tempo
MFL Magneti Flux Leakage
ML Maximum Likelihood
MPS MinimumPeak Sidelobe
PDF Probability Density Funtion
PSK Phase Shift Keying
Pigs Pipeline Inspetion Gauge
RFEC Remote Field Eddy Current
S/N Sinal/Ruído
TOA Timeof Arrival
1 Introdução
Opetróleoestálongedeser umombustívelobsoleto,jáquemesmoomalgumasreservas
pertode seu m, novassão onstantementeenontradas, eaprevisãopara oesgotamento
doóleo a ada vez mais distante. Com isso, ontinua o resimento desta indústria, e
onsequentementea neessidade de inovaçõestenológias para essa área.
1.1 Contextualização e Motivação
Dutossão o prinipalmeio de transporte utilizado naindústria do petróleo, desde 1859,
om o primeiro poço omerial na Pensilvânia (PIPELINE101, 2008). Com o passar dos
anos,muita oisa mudou,porém osdutos ontinuam sendo o modomais baratoe seguro
de se transportar o óleo, sendo utilizados em larga esala em todo o mundo. Porém,
apesar de ser o mais seguro, os dutos estão sujeitos a sofrer orrosão, e om isso ausar
sériosaidentes.
Asgrandes ausasdestaorrosãosão ofatododutotrabalharemambientealtamente
orrosivo(omonofundodomar,ouatémesmoaoarlivre)etransportaruidosontendo
ontaminantes (omo água salgada e areia), que tendem a se aumular na parte inferior
domesmo,deteriorando essa região.
A orrosão pode levar ao vazamento de uidos tóxios, ontaminando o ambiente e
podendoausarsériosaidentes, envolvendoinlusiveavidade sereshumanos,sejadireta
(porexemploexplosões)ouindiretamente(ontaminandoummananial). Essesaidentes
aarretam o gasto de muito dinheiro, seja no onserto de dutos, ou reparando os danos
ambientais. Entre 1990-99,apenas nos Estados Unidos, foramregistrados era de 3900
vazamentos de óleo e gás, om 201 mortes, e mais de $780 milhões gastos apenas om
(STAROSTINV, 1990). Por isso, é de grande interesse das indústrias do petróleo, e da
soiedade, que estes aidentes possam ser prevenidos através de inspeções dos oleodutos
àproura de regiões daniadas.
Porém, estas inspeções podem ser omplexas e dispendiosas. Os diâmetros estreitos
dastubulaçõestornaminviávelparaumapessoafazeruma inspeçãointernadas mesmas,
ealémdisso,édesejávelqueofunionamentododutosejaminimamenteafetado,evitando
pararo uxo eausar prejuízos na produção. Porestes motivosé neessária a utilização
de equipamentos que possam ser inseridos na tubulação. Equipamentos desse tipo são
onheidosomo Pigs (Pipeline Inspetion Gauge) instrumentados.
Os pigs podem arregar diversos tiposde sensores (omomagnétios, táteis e
ultras-snios),eatravésda análisedos sinaisproduzidoseolhidosporestessensores geram-se
onlusõessobre o estadodos dutos. Este tipode equipamentojá é utilizadonos dias de
hoje,porémoresultado dasinspeçõesaindanão étotalmenteonável, devidoadiversos
problemas que podem apareer durante as mesmas. Falando espeiamente de
inspe-çõesultrassnias, enontram-seproblemas devido a atenuação edispersão dos sinais de
ultrassom, sobreposição de eos e presença de eos laterais. Além disso poderão existir
ruídosnos sinais dainspeção. Estes problemas serão expliadosmais adiante.
Devido a estas diuldades, se torna muito importante o desenvolvimento de novas
tenologias,que diminuam ao máximo o uso de reursos para gerar resultados onáveis
nas inspeções, beneiando não somente à indústria (om a diminuição de gastos, e a
possibilidadede aumentaraquantidadede inspeções), mastambémàsoiedade, quenão
sofrerá om grandes atástrofes.
1.2 Objetivos
Neste trabalho será desenvolvido um algoritmo para deteção dos tempos de hegada
(TOAs - Time of Arrival) dos eos de um sinal de ultrassom em uma inspeção não
destrutiva. O objetivo deste algoritmo é melhorar o resultado de inspeções de dutos,
aumentado a sua onabilidade, e diminuindo os efeitos ausados pelos problemas
ita-dos anteriormente. O algoritmo será implementado em um iruito digital através de
um dispositivo lógio programável (FPGA - Field-Programmable Gate Array), testado
odiados om ódigo de Barker, de modo quea deteção de seus eos emmeio à ruído
seja otimizada, através de um ltro asado implementado omo um ltro FIR - Finite
Impulse Response.
Ao nal do trabalho o algoritmo desenvolvido estará implementado em um iruito
digital,prontopara ser embarado emum pig etestado eminspeçõesreais.
1.3 Desrição do Trabalho
Este trabalhoomeça om uma revisão bibliográa sobre instrumentos utilizados
(apí-tulo 2) na inspeção de oleodutos, assim omo métodos e sensores utilizados nesses
equi-pamentos. Após isso é feita uma revisão sobre proessamento digital de sinais, e omo
isso inuenia este presente trabalho. Por último, a revisão se onentra em algoritmos
matemátiosquepodemserelaionaromoesopogeral,eomoalgunsdestesalgoritmos
já são utilizadospara estes ns.
Apósissoéfeitaumaapresentação dosaspetos teóriosrelaionadosomeste
traba-lho(apítulo 3), e que são de suma importânia para ompreensão do algoritmo que foi
elaborado, assimomo aompreensão de sua implementaçãoefunionamento. São
apre-sentados aspetos teórios sobre ultrassom (inluindo inspeção e transdutores de
ultras-som),proessamentodigital,eimplementaçãode iruitosdigitais,ematemátiarelativa
aoalgoritmo(ltroasadoeódigosdeBarker). Neste momentotambémserãoexpliados
osproblemas enontrados nas inspeções ultrassnias,eomo o algoritmoproposto pode
ontornar alguns deles.
Seguindo, é apresentada a metodologia utilizada para desenvolvimento de todo o
sistema (apítulo 4). Na metodologia estão inlusos todos os álulos e simulações para
determinaçãodos parâmetros que são utilizadosnoalgoritmo.
Adeisãodequesinaldeexitaçãodeveserutilizadofoitomadaemduasfases.
Iniial-menteforamfeitosestudosdesignaldesignparadeidirumonjuntodesinais(odiados
omódigo de Barker) queseriam testados emexperimentosreais. Esta primeirafase foi
exeutada através de simulaçõesnoomputador, om base emsinais reais adquiridos em
inspeções, demodoaonseguirresultadososmaiséispossíveis. Comissofoipossívelter
resultados de quais sinais de Barker seriam mais eazes levando em onta uma relação
ros testes em laboratório, que teriam que ser repetidos inessantemente e tomariam um
tempo indeterminado. Com o signal design, a quantidade de possibilidades testada foi
muito superior e om issoonseguiu-se determinar os melhores andidatos para sinal de
exitaçãodos transdutores, podendo-se testarapenas osmesmos naparte experimental.
Alémdissosão apresentadasaraterístiasdosistema,assim omoalgoritmos
seun-dáriosque foramutilizados.
Apósisso,osmelhoresresultadosforamtestadoseminspeçõesontroladas,parasaber
aeiêniarealdoalgoritmo,alémdevalidaraimplementaçãodoalgoritmodigitalmente.
Comoalgoritmopratiamentedenidosãoapresentadososorposdeprovaqueforam
utilizadospara realizar osprimeirostestes de inspeção reais. Dois orpos de prova foram
utilizados. O primeiro é uma peça de alumínio usinada em degraus. Com este orpo
de prova o algoritmo foi testado já implementado no iruito digital, e os resultados se
mostrarambastantepromissores (apítulo5).
Osegundo orpode provaonsistede umpedaçode oleodutoorroídoaplainado,
for-mandoumaplaa. Asinspeçõesomesseorpomostraramomoosistemaseomportaria
em uma inspeção real. Os resultados para a primeira parede da peça foram exelentes,
mostrando grande robustez no método utilizado. Os resultados para a segunda parede
mostraramqueaindaexistemertosproblemasquepreisamserresolvidosquandose
ins-peiona uma região muito orroída, porém a segunda paredepassa a ser um subproduto
quando lidamos om regiões deterioradas, pois a partir da primeira parede (do duto) já
vemos que a peça está omprometidae neessita de reposição.
Todos estes resultados e problemas são analisados eexpliados (apítulo 6),e assim,
são apresentadas as onlusões de todo o trabalho realizado. Por último são listados os
2 Revisão Bibliográa
2.1 Pigs
Ospigs sãodispositivosqueservemparalevarsensoreseoutrosinstrumentospelointerior
detubulações,esãousadosjáháerade 40anosomoferramentasdedeteçãodefalhas
e perdas de metal em oleodutos (e outras funções, omo limpeza de dutos). De uma
geração tenológia para outra, mais e mais renamentos vão sendo introduzidos, seja
para simplesmentemelhorar o resultado das análises ou para aompanhar novas normas
de inspeção (REBERetal.,2002).
Os pigs semovimentam nas tubulaçõesutilizandooprópriouxo de uído existente,
sendo impulsionadosatravés de disos oloados emseus orpos, e podem levardiversos
tiposdesensores paradetetar aperdade metal,seja porontato(omo nospigs táteis),
ou por meios sem ontato (omo nos magnétios e ultrassnios). Os pigs ultrassnios
vêmsedestaando emomparação aosdemais,devido apossibilidade de semedir
direta-menteaespessuradaparede, oquenãoépossívelomosoutrospigs. Agura2.1mostra
um típio pigultrassnio dentro de uma tubulação, e seus prinipaisomponentes.
O ultrassom oferee melhor preisão do que as medidas por ampo magnétio, nas
quais se detetam perdas de material pela variação da relutânia da parede do duto.
Trabalhosomoode Katragaddaetal.(1996)utilizamoo vazamentodeuxo magnétio
MFL (Magneti Flux Leakage) para reuperar informações sobre as ondições do duto.
Porém, essas informações são mais inompletas que as forneidas por uma inspeção por
ultrassom. Por issoé proposto explorar proessos físiosadiionais que são gerados pelo
veíulo de inspeção, omo o efeito RFEC (Remote Field Eddy Current) induzido por
movimento, o efeito de orrente nas bordas de defeitos induzidas por movimento, e o
(a) (b)
Figura 2.1: Em(a)imagem de um pig ultrassnio,e em(b) uma gura om seus
prinipaisomponentes
desenvolvimentodeum robparainspeçãodedutosbaseado tambémnoMFL, utilizando
sensores magnétios Hall. É mostrado que a presença de defeitos (omo trinas, mossas,
et.),evariaçõesdematerialafetamdiretamenteosresultadosdorob,eomesmopreisa
ser equipado om diversos outros tipo de sensores para orrigir estes problemas.
Já os pigs táteis utilizam espéies de palitos para ir "tateando"a parede interna do
duto. Estes palitossão ligadosa sensores queem geral medemo movimentoangulardos
mesmos para medir o relevo interno da parede (PIPEWAY, 2008). Com essa abordagem
onsegue-seapenas mediro relevo internodo duto, eom uma resolução limitada.
Esses são alguns dos motivosquelevamaouso de pigs ultrassniosnas inspeçõesde
dutos. Trabalhosomo o de Okamotoet al. (1999)mostram resultados om esse tipode
dispositivo, utilizando o envio de sinais aústios, e detetando seus TOAs (a inspeção
ultrassniaserá expliada naseção 3.1.3).
2.2 Tratamento estatístio
Alguns trabalhos utilizam abordagens estatístias para tentativa de melhorar a deteção
telefones elulares. Já Swierz (2006) propõe o uso do ódigo de Barker de 13 bits para
detetar um sinal em meio a ruído om dois estágios: aproximação aótia dinâmia e
tomadade deisão através de redes neurais. Porém, métodos estatístios não podem ser
usados emproessamentos emtempo-real,já queé neessário o aúmulode informações
para o pós-proessamento dos dados, e o tempo e espaço para armazenamento de
infor-mações emapliaçõesdesse tipo são restritos. Logo, métodos omo estes não podem ser
implementadosemuma inspeção automatizadaporpigs.
2.3 Proessamento Digital
O uso do proessamento digital de sinais se tornou indispensável na indústria atual, já
que as possibilidades vão muito além das analógias, tornando pratiamente qualquer
tratamento de sinal possível. Um exemplo disso é a evolução na deteção de TOAs
omparando-sea abordagemutilizadaporFurukawa,Adamowski eCamerini(1998),que
era predominantemente analógianotratamentodosinal: o momentode hegadado eo
eradetetadoporumiruitodedeteçãodelimiar(oTOAeradenidonomomentoqueo
sinalultrapassavaumaertaamplitude),eaabordagemdeCanalesetal.(2007),apresenta
uma algoritmo de deteção de pios dos eos de ultrassom, implementado digitalmente,
resultando em estimações muito mais preisas para os TOAs na inspeção de oleodutos,
emomparaçãoao tratamentoanalógio.
Por outro lado, avanços no sentido de melhorar a deteção do sinal são
apresenta-dos porReber etal. (2002),que apresentauma novageraçãode ferramentas de inspeção
ultrassnia de alta resolução para inspeção de oleodutos. Seu trabalho sugere o uso
de reursos de redução de dados e omenta o uso ferramentas de software usadas para
elaborar o ontrole dosistema. Identia arealização de ferramentasde inspeção por
ul-trassomomo sendo as mais desaadoras emtermos de proessamento de sinal e sugere,
pelamençãoaousodeFPGAsnotratamentodosinalreuperado,umaabordagemdigital
doproblema de determinaçãodomomentode hegadado eo. O uso de sistemas
ultras-snios pode, inlusive, ser feito externamente à tubulação. Park, Jeong e Lim (2002),
porexemplo, apresentam dois tiposde robs autnomospara a inspeçãode espessura de
paredes de tubosde aldeirasetubulaçõesindustriais. Estes robsusam um sistemaque
mede a propagação do som em seções das paredes do tubo realizando uma inspeção
O trabalhode BalzereStripf(2002),por sua vez, apresenta um pigde altaresolução
e grande alane (meniona distânias de até 250 km), apaz de pesquisar defeitos em
todaa irunferênia do tubo om uma resolução longitudinal de 3 mmà veloidade de
1 m/s. Este pig gera uma grande quantidade de dados que é submetida a um sistema
de ompressão on-line om grandes taxas de ompatação, de forma a tornar possível
o armazenamento de grandes volumes de dados em memória de estado sólido (ita-se
que o sistema gerou 700 Tbytes, que foramomprimidos por um fator de 7000 para ser
armazenados). Para tanto, o sistema faz uso de um onjunto DSP-FPGA, para
pré-tratamento e ompataçãodos dados. Osistema utiliza um algoritmopara deteção dos
pios no sinal digitalizado para fazer um passo da ompatação do sinal. Porém, neste
sistema, a lassiação de defeitos é feita totalmente o-line, ou seja, o resultado não é
geradoemtempo real,e nem mesmo pelopróprio pig.
Dai etal. (2007) propõe um sistema om diversos transdutores para inspeções
auto-mátias de dutos, também baseado namedição das suas paredes. Oalgoritmo proposto
utilizaa estimação doespetro de potênia do sinal reebido, eatravés dadeterminação
desuas frequêniasprinipaisépossíveldeterminarosintervalosde repetiçãodoseos
ge-radosnasreexõesinternasdasparedes. Oproblemaéquetalalgoritmo(omoamaioria
dos utilizados para estes ns) é muito susetível a presença de ruído no sinal, que
dis-tore totalmentea frequênia de repetição dos sinais. Um algoritmosemelhante é usado
por Martin et al.(1992), que mostra uma ténia para medir amadas (porexemplo em
artérias humanas) baseada em transformada inversa de Fourier da derivada logarítmia
orrigida do espetro de energia do sinal. Esse algoritmo já se mostra menos susetível
aoruído, porémnão totalmentelivre,ealémdisso éum algoritmoqueneessita de muito
esforço omputaional, não podendo ser implementado para inspeçõeson-line.
TrabalhosomoosdeSuh,KimeChung(1999)tambémsugeremqueumaabordagem
digital para o problema da reepção dos eos pode trazer mais vantagens. Neste aso, é
introduzidauma maneirapara inspeção de parafusos emplantas rítiasde usinas sem a
neessidadederemoção,usandoummétododeDeonvoluçãoPreditivaDinâmia,visando
melhoraradeteçãoderahadurasdostestesonvenionais. Esteproessoéapliadopara
altasfrequênias(10MHz),eésugeridoodesenvolvimentodeumiruitointegradoASIC
(Appliation-SpeiIntegrated Ciruit) paraaumentarsuaveloidadede proessamento.
A inspeção de parafusos por ultrassom, assim omo a inspeção de paredes de oleodutos,
doparafuso. Damesmaforma,haveráreexõeseruídosquepreisarãosereliminadospara
aorretadeteçãodomomentodehegadadopulsodoeoduranteamediçãodeespessura
daparedede umoleoduto. Lin,Lee eSaul(2004)apresentam umaalgoritmosemelhante,
utilizandodeonvolução não-negativaparaestimaradiferençadetempodehegadaentre
sinaisdesomparaloalizaçãodeumafonteemissora. Oalgoritmoéomparadoom
auto-orrelação, alinhamento de fase e deonvolução simples, se mostrando superior aos três
tanto na simulação, quanto em testes em ampo. Estes dois métodos também ajudam a
diminuirainuêniaderuído,porémomootrabalhoitadoanteriormente,sãoaltamente
ustosos omputaionalmente, o que impossibilita suas implementações on-line om a
tenologiadisponível atualmente.
OtrabalhodeHiguti(1994)apresentadiversosmétodosparainspeçãodeorrosãoem
tubulações, foando prinipalmente nos métodos de deteção da espessura das mesmas.
São exibidos métodos simples (omo deteção de limiar e de pios, que não resolvem
os problemas de ruídos em uma inspeção) e métodos mais omplexos (omo orrelação
ruzada, ltro de Wiener, ltro de onformação e múltiplas reexões, que resolvem boa
partedos problemas). Oproblema équeosmétodosmaisomplexosapresentados exigem
altaargaomputaional,enão podemser implementadosemreal-time,queéaproposta
deste trabalho. Além disso, Higuti faz um estudo sobre a inuênia da rugosidade da
superfíie inspeionada noresultado da inspeção.
Simon (1993) também mostra ténias de proessamento digital de sinais para
apli-ação em ensaios não destrutivos de ultrassom, muito semelhantes às apresentadas por
Higuti,queaemnomesmoproblemadenãoserempassíveisdeimplementaçãoemtempo
real. Simontambém não onsiderou os problemas de dispersão e atenuação emseus
mo-delosparasimulações, eseusresultadosexperimentaissãofoadosnainuêniadaadição
de ruído branopara ada um dos métodos.
2.4 Filtro Casado e Código de Barker
Pelos trabalhos itados, perebe-se que a inuênia do ruído no sinal é um ponto muito
importante para a melhoria dos resultados das inspeções. Existem diversos métodos
matemátiospara melhoraressa relaçãoS/R, entre eles oltro-asado.
similhança(o ltro asado) para detetar sinais onheidos om adição de ruído brano
gaussiano, om utilização de pulsos odiados om ódigo Barker (ódigos onheidos
por suas propriedades de autoorrelação, que serão melhor expliados na seção 3.3.3).
A implementação do sistema também é feita digitalmenteem uma FPGA. O sistema é
utilizado para navegação de veíulos submarinos, através de transponders ultrassnios,
emostra resultados promissores para aestimação dos TOAs.
NotrabalhodeAkopianeAgaian(2004)émostradoumalgoritmodeumltroasado
rápidonodomíniodotempo,parausoemGPS(GlobalPositioningSystem). Oalgoritmo
desenvolvidosemostramaisrápidoqueabordagensomFFT.JáJoetal.(1999)apresenta
um ltro asado digital ompato, que onsegue atingir um tempo de proessamento
menor que um ltro onvenional, gerando assim resultados mais rápidos. Esse tipo de
algoritmosemostra muito importantenum aso de inspeçãoem tempo-real.
O trabalho de Yedlin e Majer (1993) mostra as vantagens de uma modulação por
fase (no aso uma PSK (Phase Shift Keying) om ódigo de Barker) em relação a uma
modulaçãode frequênia, reforçando os benefíios de uso destesódigos.
Zhao, Mo eGao (2007)utiliza o ódigo de Barkerpara geração de imagens oloridas
de uxos por ultrassom. Neste trabalho é demonstrado omo a seleção de um ódigo
de Barkerdeve ser feitabaseando-se emdiversos parâmetros dosistema, omo bandado
transdutor, frequênia entral, duração do sinal, entre outras. Em testes, onseguiu-se
umataxade ruídode apenas0.5dBemrelaçãoàpotêniadosinal, utilizandoum ódigo
de Barkerde 5bits e 4 ilos, om uxos rápidos de até 5 m/s.
O uso de ltros asados om ódigos de Barker também foi explorado por Hu et al.
(2006). Emseutrabalhoédemonstradoousodeltrosasadose"des-asados"(mismathed),
om ódigos de Barkere MPS (Minimum Peak sidelobe) (om lóbuloslaterais mínimos).
Ótimos resultados são alançados na relação S/R, e o uso do ódigo de Barker produz
uma performane superior que o uso de ódigos muito longos (omo os MPS). Isso é de
extrema importâniapara apliações nas quais existe um limite para o omprimentodo
sinalqueserá enviado, queéoaso destetrabalhoomoserá vistonaseção4.1. Já
Leva-non (2005) faz a otimização de ltros "des-asados", om 3 vezes o omprimento iniial
do sinal, para minimizar a integral ou o pio dos lóbulos laterais, utilizando sequenias
bináriaslongas.
deproessamentodigitaldesinaisparasoluionarestesasos. Umdosmétodospropostos
(métododaorrelaçãoruzada)seassemelhaaométododoltroasadoqueseráutilizado
nestetrabalho. Porém, Higuti(1994) mantevesua análiseexperimentallimitadaaplaas
omsuperfíiesparalelas,nãoestudandoasos omsuperfíiesinlinadas(que éoasode
loais om altaorrosão).
Simon (1993) mostrou que materias om grãos em sua estrutura também ausam
efeitos de dispersão dos eos. Esse efeito é tão maior quanto maior for a frequênia do
sinal(asosemelhanteaodarugosidadesuperialestudadoporHiguti(1994)). Também
é proposta uma ténia de orrelação ruzada, om geração de pulsos para exitação de
transdutores,quenãofoitestadaporfaltadeequipamento,masquetambémseassemelha
om aténia queserá utilizadaneste trabalho.
Levando em onta a direção destes trabalhos, onluiu-se que apostar em inspeção
não-destrutivaporultrassom, omproessamentodigitalde sinaisutilizandoltroasado
eódigosde Barkeréoaminhomaisinteressanteparatentarsoluionarosproblemasde
3 Aspetos Teórios
Neste apítulo serão abordados todos os aspetos teórios envolvidos neste trabalho, de
modoaexpliar aoleitoralgunsoneitos, alémde demonstraroporquedouso de ertos
algoritmos,atravésde suas formulaçõesmatemátias.
3.1 Ultrassom
Nesta seção será apresentada a teoria envolvendo os sinais de ultrassom, de modo a
introduziraoleitoralgunstermoseoneitosqueserãoutilizadosaolongodestetrabalho,
eexpliar omo oultrassom éutilizadoem uma inspeção não destrutiva.
3.1.1 Os sinais de Ultrassom
Sinais de ultrassom se omportam omo qualquer outro sinal aústio, e por issopodem
ter este omportamento muito bem previsto, já que a teoria de propagação aústia é
bem onsolidada. Em primeiro lugar, as ondas aústias podem ser dividas em
longitu-dinais (onde a movimentação de uma partíula é na direção de propagação da onda) e
transversais (onde amovimentação das partíulas é perpendiular à direção de
propaga-ção da onda) (KINO, 1987). A gura 3.1exemplia estes dois tipos de propagação. No
geral,ondasaústias aabamsendo umaombinaçãotantode ondastransversaisquanto
longitudinais.
Em apliações espeías, taisomo transdutores, a onstrução doemissor de ondas
podeserfeitademaneiraqueesteemitaapenasumdostipos(transversaloulongitudinal).
Transdutores para inspeções não destrutivas são feitos de modo a emitir apenas ondas
l
u
u +
δ
u
y
z
u +
δ
u
l
z
y
u
a)
b)
Figura 3.1: a)Propagação daonda longitudinal e b)Propagação daonda transversal
3.1.2 A reexão das ondas
Asondas aústias se propagam normalmenteem um meio até queenontrem uma
fron-teira, isto é, uma divisão deste meio om outro. A divisão de meios do ponto de vista
dasondasoorrequandoháumamudançanaimpedâniaaústia. Assimomotem-seo
oneitodeimpedâniaelétria-apropriedadedeumomponenteimpedirmaisoumenos
apassagem de uma orrente elétria,emaústia tambémdene-se a impedâniade um
material omo sendo a propriedade que ele possui em transmitir uma vibração aústia
om maior ou menor failidade. A impedâniaaústia de um material é denida omo
oproduto dadensidade do materialpela veloidade das ondas nomesmo,
Z
=
ρ.υ
.A onda, ao enontrar uma diferença de impedânias, será parialmente reetida e
parialmente transmitida ao outro meio. A gura 3.2 exemplia esta situação. As
frações da onda que serão reetida e transmitida dependem das impedânias aústias
dos meios (
Z
1
eZ
2
). O índiede amplitudereetida Re ode amplitude transmitidaTsão expressos por(KINSLER;FREY, 1950):
R
=
Z
2
−
Z
1
Z
2
+
Z
1
e T
=
2
Z
2
Z
2
+
Z
1
(3.1)
meio 1, Z
1
meio 2, Z
2
onda incidente
onda refletida
onda transmitida
1
2
3
Pode-se pereber que se
Z
1
eZ
2
forem muito próximos, pratiamente todaa energiaserá transmitida (omo se não houvesse mudança de meio). Alémdisso, mesmo quenão
haja uma troa de meios, as ondas vão perdendo intensidade durante sua propagação
devidoàexpansão dafrentede onda,quefaz omque aintensidade deaiaom oinverso
dadistânia perorrida, e também devido à visosidadedo material. Essas propriedades
são muito importantes para que se possa entender as diuldades em uma inspeção não
destrutiva por ultrassom.
Dependendodomeioqueotransdutorfortrabalhar,adiferençade impedâniaspode
ser muito grande, e desta maneira poua energia onseguirá ser transmitida, reetida,
e reuperada para análise. Com isso, os eos podem voltar om baixas amplitudes, e
omprometidosporruído. Na seção 3.1.3 issoserá melhor expliado.
Por último, é importante dizer que quando a onda enontra uma divisão de meios,
indo de um meio om impedânia aústia maior para um meio om impedâniamenor,
oorre uma inversão de fase damesma.
3.1.3 O TOA (Time of Arrival) e a inspeção por ultrassom
Umainspeçãonãodestrutivaporultrassomonsistebasiamenteemenviarereebersinais
deultrassomatravésde uma peça,eanalisando-seosinal reebido, tiraronlusõessobre
o estado da mesma. No aso de inspeções de paredes de oleodutos, utilizam-se pulsos
aústios gerados por transdutores de ultrassom, que se reetem nas paredes internas
do duto e são reebidos omo sinais de eo, pelo mesmo ou por outros transdutores.
Conheendo-seaveloidadede propagaçãodaonda nomeio,emedindo-seo tempoentre
oenviodaonda eoreebimento doseu eo (onheido omoTOA)épossíveldeterminar
adistâniaentreotransdutoreaparede. Determinando-seestas distâniasseguidamente
aolongode umorpopode-sereonstruirorelevodomesmo. Alémdisso, épossívelmedir
aespessura daparede, peladiferença de tempo entre o primeiroeo segundo eo.
OTOAéestimadoanalisando-seosinalde eoreebido. Porexemplo,pode-seadotar
oinstantede maioramplitude dosinalomo estimativadoTOA. Agura 3.3mostra um
exemplode envio ereebimentodos eos geradospelas paredes, eseus respetivos TOAs
(adotando-seumritériodemaioramplitudeomosendooTOA).Apropagaçãodeondas
Figura 3.3: Envio ereebimentodos eos dosinal de ultrassom, e seus respetivos
TOAs
é pratiamente espeular, gerando sinais de eo intensos e bem omportados. Porém,
quando tenta-se reebersinais de eo gerados por superfíies orroídas e rugosas,em um
meio om alta atenuação, a relação S/R do eo reebido é fortemente prejudiada. A
gura 3.4 mostra laramente a diferença de eos obtidos em uma superfíie plana em
meio limpo, e os eos misturados a ruído em superfíies orroídas, e meios altamente
atenuantes (omo opetróleo). Estes eos om baixa taxa S/R(gura 3.4.(b)) setornam
difíeisde ser detetadosorretamente.
(a) (b)
Figura 3.4: Sinaisde eo obtidos emágua, (a)geradoporuma plaade alumínioplana
epolida; e(b) gerado emregião orroídada plaa
onda longitudinal se onverte em uma longitudinal, mais uma omponente transversal.
Estasondastransversaisaabamtambémvoltandoaotransdutor,gerandomaisinertezas
nadeteção dos eos. Essas ondas são enaradas omo ruído adiional aos que já foram
itados.
Veria-se portanto a neessidade do desenvolvimento de novas tenologias, que
me-lhoremessa relaçãoS/Rnos eosreebidos, paraqueaestimativadoTOA possa serfeita
om maiorpreisão, edesta maneirao resultado da inspeção tornar-se mais onável.
Para apliações em tubulações, pode-se alular qual será a atenuação esperada do
primeiro e do segundo eo, utilizando os índies de reexão e transmissão denidos na
equação3.1. Para aamplitudedoprimeiroeo,aplia-seapenasaequaçãodereexão. Já
parao segundo eo, aplia-seade transmissão (do meioemque seenontrao transdutor
paraaprimeiraparede), ade reexão(nasegunda parede),enovamenteade transmissão
(da primeiraparedede voltapara o meio).
Para a impedânia aústiado óleo pode-se utilizar uma aproximação om o mesmo
valordaimpedâniaaústiadaágua,queéde
1
.
48
MRayl
,e paraaparededooleodutousa-sea do aço queé de
40
MRayl
(KINSLER;FREY, 1950).Dessa forma,a amplitudedoprimeiroeo será 93%daamplitude iniialemitida,ea
dosegundo eo será 13%.
Porúltimo,éimportanteressaltarquedevidoàinversãodefasequeoorrenosegundo
eo, deve se ter em mente que se proura-se um pio positivo no primeiro eo, deve-se
prourarum pio negativo nosegundo.
3.1.4 Transdutores de Ultrassom
Para melhor entender todo o oneito da inspeção porultrassom, é interessante
ompre-ender omo funiona o transdutor ultrassnio, que é a peça responsável pelo envio e
reebimento dos sinais de ultrassom.
Os transdutores são feitos de material piezoelétrio (material que onverte tensão
meâniaempotenialelétrio,ouvie-versa) epodem terdiferentes formatos,tamanhos
e frequênias. A gura 3.5 mostra omo seria a onguração mais simples possível para
d
V
T
T
+
-Figura 3.5: Modelo simpliadode um transdutor de ultrassom
Utilizando asequaçõesonstitutivas piezoelétrias (SZABO,2004), hega-se a
onlu-sãode quequando umatensãoelétriaéapliadanos terminaisdotransdutor, umaforça
aparee noorpo, eseu valoré,
F
(
t
) = (
hC
0
V /
2)[
−
δ
(
t
) +
δ
(
t
−
d/c
)]
,
(3.2)onde
h
é a onstante piezoelétria,C
0
é a apaitânia,V
é a tensão apliada,d
é adistânia entre os terminais, e
c
a veloidade do som entre os eletrodos (dada porc
=
p
C
D
/ρ
, onde
C
D
é onstante de rigidez e
ρ
é a densidade do material. Tomando atransformadade Fourier daequação 3.2temos,
F
(
f
) =
−
i
(
hC
0
V
)
e
−
iπf d/c
sin
[
π
(2
n
+ 1)
f /
2
f
0
]
.
(3.3)A equação 3.3mostra que a força é máxima nas harmnias ímpares(
n
= 1
,
2
,
3
, ...
)dafrequêniafundamental(ou de ressonânia)
f
0
=
c/
2
d
. Daí vema grandeimportâniadeexitarostransdutoresemsua frequêniaderessonânia(esuasharmnias),demodo
a transmitira maior energia possível. Fora destas frequênias, pouquíssima energia será
transmitida,impossibilitando ageração eenvio de sinais de ultrassom.
No entanto, sinais om banda base de baixa frequênia também podem ser usados
omo exitação utilizando-se uma onda portadora na frequênia de ressonânia. Esta
3.1.4.1 Frequênia do transdutor
Para esolher a frequêniabase dotransdutor, deve-se levaremonsideração dois fatores
prinipais:
•
Espessuraasermedida-Quantomenoraespessuraqueseesperamedir,menordeveser o omprimento de onda do sinal ultrassnio (e onsequentemente, maior sua
frequênia),demodoqueoseosprovenientesdainspeçãonãosesobreponham. Isto
é onheido omo a resolução axial do transdutor, ou seja, qual a medida mínima
de espessura quepode-se distinguirutilizandoo mesmo.
•
Atenuação do sinal - A diferença de impedânias aústias dos meios, somada aatenuaçõespor ruído,dispersão, rugosidade eorrosão tornam a deteção dos eos
diultosas poramuar os eos muito atenuados. De modogeral, quanto maior a
frequênia,maior a atenuação.
Nas apliações de inspeções de dutos, espera-se medir espessuras de até
5
mm
. Anorma SAE AMS 2632 reomenda que para espessuras menores de
13
mm
utilize-sefrequêniasentre
2
e
10
MHz
(SAE AMS2632, 1974).Emrelaçãoaoitematenuação,sabe-se queparamaiores frequênias,asondas
ultras-snias sofrem maior atenuação quanto maior o espaço perorrido. Além disso, o estudo
da rugosidade superial feito por Higuti (1994) onluiu que a rugosidade da peça que
estásendo inspeionada tambémage de formadiferentepara diferentes omprimentosde
onda(ou seja, para diferentes frequênias). A rugosidade age prinipalmente diminuindo
a amplitude do sinal reebido (espalhando a energia), e essa atenuação é maior quanto
maior for a frequênia do sinal. Como também já foi itado (SIMON, 1993), o mesmo
aontee para materiaisom granulação emsua estrutura.
Destamaneiratem-seumarelaçãode ompromissoparaesolher umafrequênia alta
(om um omprimento de onda baixo), que resulta em uma resolução axial maior (para
deteção de paredes menos espessas), porém que tem uma atenuação maior devido à
rugosidade,orrosão eperursoda onda.
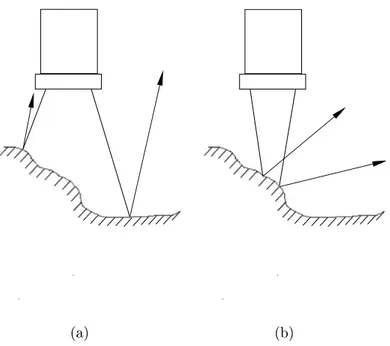
3.1.4.2 Transdutores foais
Também existe a possibilidade de utilizar transdutores foalizados. A gura 3.6 mostra
exemplosde um transdutor normale um foalizado.
(a)
Foco
(b)
Figura 3.6: Em(a) um transdutor não-foalizado,eem (b) um transdutor foalizado
Otransdutorfoalizadoonentraofeixeaústioemitido,o quepoderiabeneiar a
loalizaçãoexata de pontos orroídos. Porém, omo as superfíies orroídas apresentam
pers irregulares e ligeiramente inlinados, pode oorrer o espalhamento na reexão do
sinal. Desta maneiranão é indiadoo uso de transdutores foalizados, poisesse
espalha-mentopode reetiroeo parauma regiãonão oberta pelotransdutor. Mesmoperdendo
um pouo de resolução lateral om o feixe não diretivo, a hane de reeber energia
re-etida se torna maior om um transdutor não foalizado. A gura 3.7 demonstra omo
o espalhamento do sinal é prejudiial no aso do transdutor foal. Por este motivo foi
(a) (b)
Figura 3.7: Em (a) o transdutornão foal está dentro doampode ondasreetidas
poruma superfíieirregular,o que não aontee em(b) om o transdutor foalizado
3.2 Proessamento digital de sinais
Nesta seção serão desritas as razões do uso do proessamento digital de sinais. O
pro-essamento de sinais onsiste na análise e/ou modiação de sinais de forma a extrair
informações dos mesmos e/ou torná-los mais apropriados para alguma apliação
espe-ía. Este proessamento pode ser feito tanto analogiamente omo digitalmente. A
grande vantagem de um proessamento digital de sinais (DSP - Digital Signal
Proes-sing) é que se pode empregar algoritmos muito mais omplexos e eientes que em um
proessamento analógio. O DSP omeçou em meados dos anos 70, quando os
ompu-tadoresomeçaram aar disponíveis, porém eram extremamentelimitados aapliações
espeías devido aos altos ustos envolvidos. A partir destes primórdios, avanços
enor-mesforamonseguidos,tornandoo DSPumaferramentaindispensávelemtodas asáreas
queenvolvem qualquer tipo de aquisição de sinais (SMITH, 1997).
Basiamentequalqueralgoritmopode ser implementadodigitalmente, jáquesão
inú-merasaspossibilidadesdedesenvolvimentodeumiruitodigital. Elepodeser
implemen-tadode diversas maneiras: viasoftware om proessadores dediados, om proessadores
normais,ou até om iruitos digitais eletrnios totalmente dediados. Isso explia sua
sis-3.2.1 Sistema Embarado - FPGA
Noaso das inspeções om pigs, deseja-se quetodo osistema desenvolvidoesteja
embar-adonomesmo(paraqueelepossa orrerosdutossem neessidadede estarligadoauma
base xa). Por isso é neessário reduzir o onsumo de energia e a quantidade de dados
a ser armazenada. Assim o desenvolvimento de um sistema totalmente dediado e que
realizeo proessamento emtemporeal éneessário.
Nesta fase de estudo e pesquisa, desenvolver diversos iruitos dediados onsumiria
muitos reursos naneiros, além de muito tempo. Uma maneira de de resolver estes
problemas, eatender as exigêniasdo sistema éa riação de um iruito digitalem uma
FPGA.AprimeiraFPGAfoidesenvolvidaem1985pelaXilinx. Estassãodispositivosem
silíioformados por bloos lógios(que implementam qualquer função digital,atravésde
memórias), matrizes de interonexão (que roteiam as ligações entre os bloos lógios), e
bloos de entrada esaída para onexãoom oambienteexterno (XILINX, 2008). A gura
3.8 mostraum exemplosimpliado desta estrutura.
E / S
E / S
E / S
E / S
E
/
S
E
/
S
E
/
S
E
/
S
B.L.
B.L.
B.L.
B.L.
B.L.
B.L.
B.L.
B.L.
B.L.
M
M
M
M
Figura 3.8: Estrutura interna simpliada de uma FPGA. E/S - bloos de entrada e
saída, B.L.- bloos lógios e M -matrizes de interonexão
Emuma FPGA pode ser implementadoqualquer iruitológio, pormeioda
progra-maçãoere-programaçãodas memórias,dos blooslógiosedasmatrizesde interonexão,
oquetrazgrandesbenefíiosnodesenvolvimentodeumprojetoomoesse,ondeos
3.2.2 Proessamento Digital
Para se realizar um DSP, primeiramente deve-se onverter o sinal adquirido para uma
versão digital (já que qualquer sinal na natureza é analógio, existindo em tempo
on-tínuo). No aso de inspeção por ultrassom, omo a frequênia do sinal é relativamente
alta (era de 5 MHz) é neessário uma onversão analógia/digital muito rápida. Por
exemplo, neste trabalhoserá utilizadauma taxa de aquisição de era de 50 MS/s, para
proporionaruma resolução adequada.
Além disso, omo os perursos de inspeção são longos, a quantidade de dados que
deveriamserarmazenadosémuitogrande,tornandoinviávelsalvartodos osdados
adqui-ridos. Para resolveresteproblema épropostorealizaroDSPomum hardware dediado,
isto é, um iruito que trabalheapenas fazendo o proessamento, e em tempo real,
tor-nandoneessário salvar não os sinais ompletos, mas somente ainformação desejada(no
aso oTOA doprimeiro eo e aespessura daparede emada ponto).
3.3 Algoritmos matemátios
Nestaseçãoseráapresentadatodaateoriaenvolvidaparaodesenvolvimentodoalgoritmo
queseráimplementado, desdeosoneitos básiosde representação matemátiadosinal,
até adesrição doalgoritmoemsi.
3.3.1 Estimação do TOA
Como foi visto naseção 3.1.3, o problema básio nainspeção ultrassnia é a estimação
dotempode hegada dos eos dopulso ultrassnio. Omodelo matemátio simpliado
dosinal reebido pode ser desritoomo:
r
(
t
) =
s
(
t
−
A
) +
w
(
t
)
, com
0
<
=
t <
=
T
(3.4)onde,
•
r
(
t
)
-sinal observado•
A
- instantede hegada(TOA)•
w
(
t
)
- ruído branogaussiano•
T
- tempo de observação dosinalPela equação 3.4 pode-se pereber que o sinal reebido é basiamente omposto de
um sinal onheido (que é osinal de interesse para álulodo TOA) presente a partirde
um erto instante (no aso, o TOA que prouramos), somado de um ruído branoWGN
(White Gaussian Noise). O WGN é uma boa aproximação de situações do mundo real,
poisé um sinal aleatório,ujoespetro de potênia éplano, istoé, tem igualintensidade
paraqualquerfrequênia,esuasamostrasemqualquerinstantedotempotemdistribuição
gaussiana om média nula.
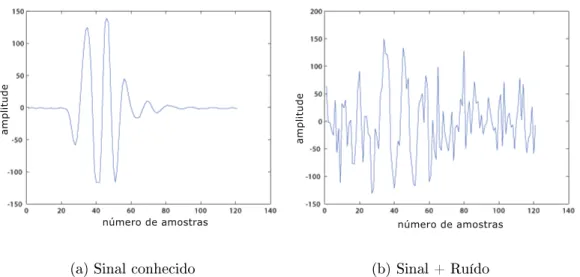
A gura 3.9demonstra omo a adição de ruído onsegue prejudiar a estimativa do
TOA, ou seja,a deteção do eo dentro dosinal reebido.
(a)Sinalonheido (b)Sinal+Ruído
Figura 3.9: Em(a)o sinal onheido, eem (b) om adição de ruído brano,
diultando adeterminação doTOA
O problema se torna estimar o valor do instante de hegada
A
em meio ao sinalobservado
r
(
t
)
a partir de um modelos
(
t
)
do sinal onheidoom omenor erro possível.No aso deste trabalhotemos limitaçãode tempo de proessamento para o algoritmo,já
queomofoiexpliadonaseção3.2.1,oproessamentodeveráserfeitoemtemporealom
aodesenvolvidoporLimaeFurukawa(2002),poisesteltropodeserimplementadoomo
um ltro FIR,gerando respostas om um atraso xo.
3.3.2 Filtro Casado
A abordagem geralmente utilizada para se estimar uma parâmetro determinístio (no
aso o TOA) através de observações aleatórias é onheido omo estimação de máxima
verossimilhança(ML-MaximumLikelihood). Supõe-sequesequeiraestimarumavariável
X
,a partir de uma grandezau
que foi observada. Matematiamente issoorresponderiaa enontrar um valor de
X
, para umu
dado, que maximizasse a função densidade deprobabilidade(PDF - ProbabilityDensity Funtion)ondiional
p
u
|
X
(
u
|
X
)
(LIMA, 2002).Osinal
r
(
t
)
pode serdesritoomoumaaproximaçãodeK
oeientesutilizandoumonjunto de funções arbitrárias ortonormais
φ
i
(
t
)
,tal que,r
(
t
) =
K
X
i
=1
r
i
φ
i
(
t
)
,
0
≤
t
≤
T,
(3.5)r
i
=
Z
T
0
r
(
t
)
φ
i
(
t
)
dt, i
= 1
,
2
, ..., K,
(3.6)Apliando adeomposição daequação 3.5na formulaçãogeral dosinal, mostrada na
equação3.4, hega-seque suas omponentes serão
r
i
=
Z
T
0
s
(
t
−
A
)
φ
i
(
t
)
dt
+
Z
T
0
w
(
t
)
φ
i
(
t
)
dt
=
s
i
+
w
i
,
(3.7)Pode-sedemonstrarqueasomponentes
w
i
doruídosãovariáveisaleatóriasgaussianasom média nula e variâniaigual ao valorquadrátio médio do ruído. Além disso, essas
omponentes são variáveis aleatórias estatistiamente independentes entre si (devido ao
fato do ruído ser brano) (TREES, 1968). Assim, para um dado valor de A, a PDF de
adaomponente
r
i
seráp
r
i
|
A
(
R
i
|
A
) =
1
p
2
πσ
2
n
exp
−
1
2
[
R
i
−
s
i
(
A
)]
2
σ
2
n
,
(3.8) ondeσ
2
n
é a variâniado ruído es
i
(
A
)
é a omponente de s(t-A) para um dado valordeComoasomponentes
r
i
são estatistiamenteindependentes,aPDFdosinalpodeseresritaomo a produtóriadas PDFsdas omponentes
p
r
|
A
(
R
|
A
) =
A
Y
i
=1
1
p
2
πσ
2
n
exp
−
1
2
[
R
i
−
s
i
(
A
)]
2
σ
2
n
,
(3.9)AestimaçãoMLéobtidaalulando-seaequação3.9paraumdadosinal
r
(
t
)
reebido,enontrando-se o valorde
A
que maximiza amesma.Porse tratar de um problema de maximização, a equação pode ser simpliada om
osseguintes passos:
1. Enontrar
A
quemaximiza a expressão3.9é o mesmo queenontrarA
quemaxi-miza ologaritmodaexpressão. Apliandoo logaritmoe exeutando aprodutória tem-se
K.log
p
1
2
πσ
2
n
!
−
1
2
σ
2
n
K
X
i
=1
(
R
2
i
−
2
R
i
s
i
(
A
) +
s
2
i
(
A
))
(3.10)2. Como
σ
2
n
não depende de A, pode-se simplesmenteprourar um A que minimizeaexpressão
K
X
i
=1
R
2
i
−
K
X
i
=1
2
R
i
s
i
(
A
) +
K
X
i
=1
s
2
i
(
A
)
(3.11)3. Mas
K
X
i
=1
R
i
s
i
(
A
) =
K
X
i
=1
R
i
Z
T
0
s
(
t
−
A
)
φ
i
(
t
)
dt
=
Z
T
0
(
s
(
t
−
A
)
K
X
i
=1
R
i
φ
i
(
t
))
dt
=
Z
T
0
r
(
t
)
s
(
t
−
A
)
dt
(3.12)
e de maneira semelhante,
K
X
i
=1
R
2
i
=
Z
T
0
r
2
(
t
)
dt,
(3.13)K
X
i
=1
s
2
i
=
Z
T
0
s
2
4. Assim, a expressãodo item 2é equivalentea
Z
T
0
r
2
(
t
)
dt
−
2
Z
T
0
r
(
t
)
s
(
t
−
A
)
dt
+
Z
T
0
s
2
(
t
−
A
)
dt.
(3.15)5. Porém, para um dado
r
(
t
)
, temos que a primeira e a última integral da equação3.15 orrespondemrespetivamente àsenergiasdos sinais
r
(
t
)
es
(
t
)
,e não dependemdovalorde
A
no modelo adotado. Logo, a estimativade ML é ovalor deA
que maximizaaexpressão
Λ(
r
(
t
)
, A
) =
Z
T
0
r
(
u
)
s
(
u
−
A
)
du
(3.16)Assim, o problema de maximização de
p
r
|
A
(
r
|
A
)
foi reduzido a maximizar a funçãoΛ(
r
(
t
)
, A
)
. Esta equação éonheida omo função de verossimilhança.A equação 3.16 poder ser vista omo uma integralde onvolução. Para queisso seja
possível, basta enxergá-la omo sendo a saída de um sistema linear om entrada
r
(
t
)
eresposta impulsiva
s
(
−
t
)
(que nada mais é que o sinal de interesse revertido no tempo).A gura3.10 exemplia asaída de um sistemalinear.
x(t)
y(t)
h(t)
Sistema Linear
y
(
t
) =
Z
∞
−∞
x
(
u
)
h
(
t
−
u
)
du
Figura 3.10: Exemplo da saída de um sistema linear
Em suma, um reeptor apaz de forneer estimativas do TOA de um sinal pode ser
um sistema linear, uja resposta impulsiva é o sinal desejado revertido no tempo. Um
reeptordeste tipoéonheidoomo ltroasado. Aestimativaéobtidadetetando-se
opio de saída do ltro,o que é equivalentea alulara função de verossimilhança para
vários valores de
A
e tomar o máximo. Uma observação pertinente no momento é quenuma apliaçãoreal não é possível implementar um ltro om resposta
s
(
−
t
)
(pois seriaum ltro não-ausal). Portanto, o que se faz é utilizar uma resposta do tipo
s
(
−
t
+
t
f
)
,om um atraso xoe onheido.
Por denição, um ltro asado a um sinal
s
(
t
)
qualquer é aquele uja função detransferênia(ou resposta impulsiva)é
h
(
t
) =
ks
(
t
f
−
t
)
,
(3.17)onde
k
é uma onstante arbitrária, et
f
omo dito é a duração (o omprimento, no asode tempo disreto) do sinal. Ou seja, o ltro é basiamente o sinal iniial invertido no
tempo,atrasado, eesalado. Agura3.11 mostraumexemplode umsinal,eum possível
ltroasado ao mesmo.
-1
0
1
2
3
4
5
6
7
8
9
10
-5
0
5
10
-8
-7
-6
-5
-4
-3
-2
-1
0
1
2
-5
0
5
10
0
1
2
3
4
5
6
7
8
9
10
-5
0
5
10
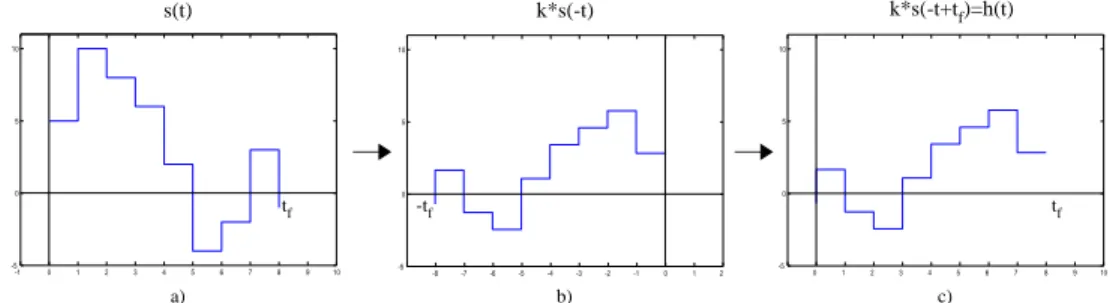
s(t)
k*s(-t)
k*s(-t+t
f
)=h(t)
a)
b)
c)
t
f
-t
f
t
f
Figura 3.11: Ema)tem-se o sinal original,emb) sua inversão notempoe esalado
porum fator
k
, eem ) apliandoum atrasoA
tem-sea função de transferênia doltroausal
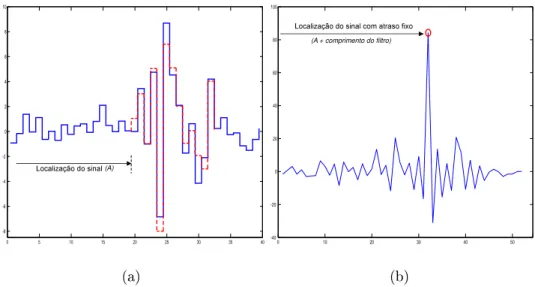
Utilizandoomesmosinaldagura3.11eseuorrespondenteltroasado,émostrado
nagura3.12 estesinalatrasadoeenvolvidoemruído,easaídadepoisdeuma ltragem.
Pode-se perebero piodasaída, queéamelhorestimativapara oatraso
A
mostradonagura3.12.
Nagura3.12pode-sepereberqueopiooorreomumatrasoigualaoomprimento
do sinal utilizado para gerar o ltro (
t
f
). Como expliado anteriormente, isso aonteepelofatodoltroterqueserausal(paraquepossaserimplementadosiamente). Porém
este atrasosempre será xo e onheido.
Paradeterminar-seorretamenteeste atrasoentão,espera-sequeasaída doltroseja
umpulsoomaisestreitopossívelentradonoatraso
A
(TURIN,1960). Porém,dependendodos sinais utilizados, muitas ambiguidades podem apareer, por exemplo devido a onda
portadora (que é neessária na exitação de transdutores, omo foi desrito na seção
3.1.4). Umagrandezautilizadapara medirqualitativamenteessa ambiguidadeé afunção