CONTROLE DA PRESSÃO SELETIVA EM ALGORITMO
GENÉTICO APLICADO A OTIMIZAÇÃO DE DEMANDA EM
INFRA-ESTRUTURA AERONÁUTICA.
Dissertação apresentada à Escola Politécnica da Universidade de São Paulo para obtenção do título de Mestre em Engenharia.
Área de Concentração: Sistemas Digitais
Orientador:
Prof. Dr. João Batista Camargo Jr.
São Paulo
ou indireta de várias pessoas. Sou especialmente grato a todas elas.
− Meu orientador Professor Dr. João Batista Camargo Júnior, pela dedicação, incentivo e por ter acreditado em meu potencial.
− A Gilberto e Alice, meus pais, que muito me apoiaram com amor, carinho e paciência desde o início.
− Aos meus irmãos Adriana e Alexandre pelo apoio.
− A minha tia Deise, que com muito, contribuiu nesta jornada.
− Ao amigo Professor Dr. Dib Karam Junior, pelo apoio e incentivo para a realização deste trabalho e pelas inúmeras discussões no decorrer da pesquisa.
− Aos Professores Dr. Paulo Sérgio Cugnasca e Dr. Jorge Rady de Almeida, que contribuíram nas decisões quanto aos rumos tomados nesta pesquisa.
− Ao amigo Jamil Kalil Naufal Júnior por abrir as portas de sua pesquisa, discussões e ajuda neste trabalho.
− Aos meus amigos de laboratório, Ítalo Oliveira, Ricardo Gimenes, Lúcio Vismari, Alan Borim, Sérgio Miranda e Danilo Shibata.
− As amigas Regina Cantele e Andréa Sipoli.
− Aos estagiários Daniel Scalli e Guilherme Matiussi pela dedicação e empenho.
− Ao Allan e Francisco do LCCA da USP, que ajudaram quanto ao ambiente de simulação Alcatéia.
− A Escola Politécnica da USP pela oportunidade dada para a realização desta pesquisa.
− Agradeço a Deus que tornou tudo possível.
A busca por entender e copiar o majestoso mundo que nos cerca fez do homem um curioso
por natureza. Santos Dumont realizou a proeza de alcançar um dos sonhos mais antigos do
homem, voar. Charles Darwin escreveu a Teoria da Evolução como um paradigma para a
nossa existência, inspirando John Holland a desenvolver os Algoritmos Genéticos.
Atualmente, com o grande crescimento da demanda no transporte aéreo, o homem volta seus
esforços na busca por soluções que garantam a segurança da sociedade. Recentemente o
pesquisador Naufal reuniu todos esses conceitos e desenvolveu um Modelo de Otimização de
Demanda para o setor aeronáutico. Tal modelo visa amenizar a carga de trabalho dos
controladores de tráfego aéreo na busca por aumentar a qualidade do serviço prestado por esse
profissional, garantindo dessa forma níveis aceitáveis de segurança. Embora o modelo tenha
se mostrado eficiente, ele apresentou uma deficiência quanto aos tempos despendidos para
alcançar bons resultados. Na tentativa de otimizar os tempos do modelo atual, este trabalho de
pesquisa adicionou o conceito de pressão seletiva, que representa a influência do meio
ambiente. A representação da influência que o meio ambiente tem dentro da teoria da
evolução de Darwin pode gerar uma implementação mais realista dos algoritmos genéticos.
Este trabalho propõe a aplicação dos métodos de controle da pressão seletiva como alternativa
de diminuir os tempos despendidos pelo modelo de otimização de demanda na busca por
The search for understanding and copying the magnificent world that surrounds us has made
man curious by nature. Santos Dumont achieved one of man’s most ancient dreams, to fly.
Charles Darwin wrote the Theory of Evolution as a paradigm of our existence, inspiring John
Holland to develop genetic algorithms. Presently, because of the growth of demand in air
transportation, men concentrate their efforts in the search for solutions that can guarantee the
safety of our society. Recently, researcher Naufal has gathered all these concepts and
developed a Demand Optimization Model for the aeronautical sector. This model aims to
ease the workload of air traffic controllers, in a search for increasing the quality of this service
and guaranteeing acceptable levels of safety. Although his model has proved to be efficient, it
has presented a weak point when it comes to time spent to reach good results. In an attempt
to optimize time in the existing model, this research added the concept of selective pressure,
which represents the influence of the environment. The representation of the influence that
the environment has inside Darwin’s Theory of Evolution can generate a more realistic
implementation of genetic algorithms. This work proposes an application of selective
pressure control methods as an alternative to diminish time spent by the Demand
LISTA DE TABELAS... 9
LISTA DE ABREVIATURAS E SIGLAS... 10
LISTA DE SÍMBOLOS... 12
1 INTRODUÇÃO... 14
1.1 OBJETIVOS... 15
1.2 MOTIVAÇÃO... 16
1.3 ESTRUTURA DA DISSERTAÇÃO... 17
2 CONTROLE DE TRÁFEGO AÉREO... 19
2.1 OESPAÇO AÉREO... 19
2.2 FASES DE OPERAÇÃO DE VÔO IFR... 20
2.3 ADIVISÃO DO ESPAÇO AÉREO... 22
2.4 CONTROLE DE TRÁFEGO AÉREO... 24
2.5 CAPACIDADE DE TRÁFEGO NOS SETORES AÉREOS... 26
2.5.1 Controle APP e ACC... 27
2.5.2 Cálculo para o Número de Aeronaves Simultâneas em um Setor ... 28
2.6 CRESCIMENTO DA DEMANDA NO TRÁFEGO AÉREO... 30
2.7 CONTROLADOR DE TRÁFEGO AÉREO... 31
2.7.1 Carga de Trabalho do Controlador de Tráfego Aéreo ... 32
2.7.2 Segurança e o Controlador de Tráfego Aéreo... 33
2.8 CONSIDERAÇÕES FINAIS DO CAPÍTULO... 34
3 PRESSÃO SELETIVA... 35
3.1 INTRODUÇÃO... 35
3.2 RELAÇÃO DA PRESSÃO SELETIVA COM OUTROS CONCEITOS DOS ALGORITMOS GENÉTICOS... 37
3.2.1 Velocidade de Convergência ... 37
3.2.2 Direção da Evolução... 38
3.2.3 Diversidade populacional ... 39
3.3 CONTROLE DA PRESSÃO SELETIVA... 40
3.3.1 A Pressão Seletiva no Método de Seleção por Roleta ... 41
3.3.2 A Pressão Seletiva no Método de Seleção pelo Torneio ... 41
3.3.3 A Pressão Seletiva no Método de Seleção pelo Ranking... 42
3.4 MÉTODOS DE CONTROLE DA PRESSÃO SELETIVA... 43
3.4.1 Ranking Linear ... 43
3.4.2 Ranking Geométrico... 44
3.4.3 Corte ... 45
3.4.4 Nicho e Compartilhamento... 46
3.4.5 Escalamento Linear ... 47
3.4.6 Normalização... 51
4.1.3 Exponencial ... 64
4.2 PARÂMETROS DO CONTROLE DA PRESSÃO SELETIVA... 67
4.3 IMPLEMENTAÇÃO DOS MÉTODOS DE CONTROLE DA PRESSÃO SELETIVA NO MOD... 69
4.4 CONSIDERAÇÕES FINAIS DO CAPÍTULO... 72
5 APLICAÇÃO DOS MÉTODOS DE CONTROLE DA PRESSÃO SELETIVA NA OTIMIZAÇÃO DO MOD... 73
5.1 AINFRA-ESTRUTURA E OS PARÂMETROS DO MOD ... 74
5.1.1 Dados do Cenário Utilizado... 74
5.1.2 Janelas de Ocupação... 77
5.1.3 Parâmetros dos Algoritmos Genéticos... 78
5.2 OAMBIENTE COMPUTACIONAL... 81
5.3 SIMULAÇÕES DO CONTROLE DA PRESSÃO SELETIVA... 82
5.3.1 Etapa 1 – Método do Escalamento Linear ... 84
5.3.2 Etapa 2 – Calibração dos Tipos de Pressão Seletiva... 88
5.3.3 Etapa 3 – Pressão Seletiva Constante ... 101
5.3.4 Etapa 4 – Calibração para Pressão Seletiva Variável ... 105
5.3.5 Etapa 5 – Pressão Seletiva Variável ... 112
5.3.6 Etapa 6 – Simulações Complementares... 115
5.4 CONSIDERAÇÕES FINAIS DO CAPÍTULO... 119
6 CONCLUSÃO... 121
6.1 CONTRIBUIÇÕES... 124
6.2 TRABALHOS FUTUROS... 125
BIBLIOGRAFIA... 127
APÊNDICE A–ALGORITMOS GENÉTICOS... 133
APÊNDICE B–MODELO DE OTIMIZAÇÃO DE DEMANDA (MOD)... 152
APÊNDICE C–TESTES DE HIPÓTESES... 168
APÊNDICE D–GRÁFICOS DE CALIBRAÇÃO DO PONTO DE MUDANÇA DA PRESSÃO SELETIVA... 174
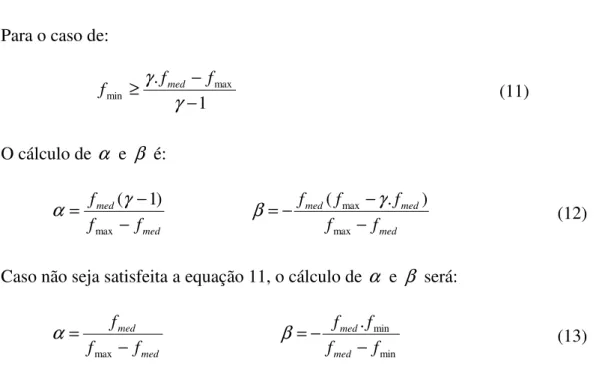
Figura 1. Exemplo de aumento da pressão seletiva pelo Escalamento Linear. ...48
Figura 2. Exemplo de diminuição da pressão seletiva pelo Escalamento Linear...48
Figura 3. Exemplo da aplicação do Escalamento quando surge um super-indivíduo. ...49
Figura 4. Exemplo em que o uso do mapeamento linear gera algum resultado negativo. ...50
Figura 5. Exemplo de aplicação do mapeamento linear corrigido. ...51
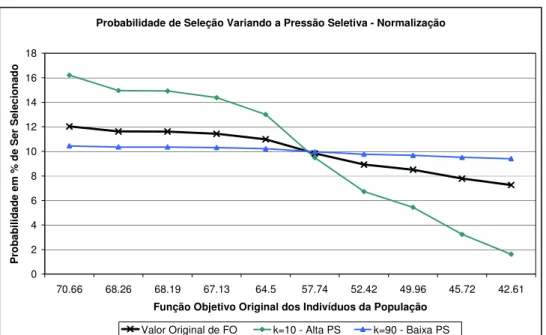
Figura 6. Probabilidade de seleção variando a pressão seletiva pelo método Adaptado de Normalização em uma população com alta distinção. ...59
Figura 7. Probabilidade de seleção variando a pressão seletiva pelo método Adaptado de Normalização em uma população com baixa distinção. ...60
Figura 8. Exemplo de uma população com variação no valor da escala de ordenação...62
Figura 9. Gráfico de comparação entre os métodos Adaptado de Normalização e Exponencial. ...67
Figura 10. Implementação do Controle da Pressão Seletiva em Algoritmo Genético Básico. 70 Figura 11. Exemplo do funcionamento de um software (algoritmo genético) com o código fechado. ...70
Figura 12. MOD em blocos para a implementação de um novo bloco: controle da pressão seletiva...71
Figura 13. Infra-estrutura aeronáutica utilizada. ...75
Figura 14. Variação da pressão seletiva dentro do intervalo...89
Figura 15. Exemplo do número de vezes de seleção dos indivíduos conforme Tabela 12. ...94
Figura 16. Gráficos dos valores de calibração de alta pressão seletiva no método Adaptado de Normalização...95
Figura 17. Gráficos de calibração dos valores de baixa pressão seletiva no método Adaptado de Normalização...96
Figura 18. Gráficos de calibração dos valores de alta pressão seletiva no método do Ranking Normalizado. ...97
Figura 19. Gráficos de calibração dos valores de baixa pressão seletiva no método do Ranking Normalizado. ...97
Figura 20. Gráficos de calibração dos valores de baixa pressão seletiva no método Exponencial. ...99
Figura 21. Gráficos de calibração dos valores de alta pressão seletiva no método Exponencial. ...99
Figura 22. Gráfico para seleção do ponto de mudança da Pressão Seletiva...109
Tabela 1 – Fases de Operação do Trafego Aéreo com procedimento IFR...21 Tabela 2 – Movimento de Passageiros no Aeroporto de Congonhas (IAC, 2003). ...31 Tabela 3 – Exemplo da aplicação do método de Normalização em uma população de 8
indivíduos. ...51 Tabela 4 – Variação da pressão seletiva em população com alta distinção entre os indivíduos
pelo método Adaptado de Normalização (equação 16)...57 Tabela 5 – Variação da pressão seletiva em população com baixa distinção entre os indivíduos pelo método Adaptado de Normalização (equação 16)...59 Tabela 6 – Exemplo do uso do Ranking com variação das probabilidades entre os indivíduos
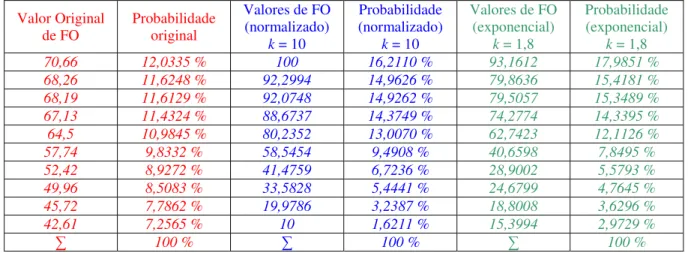
utilizando o conceito de normalização. ...63 Tabela 7 – Exemplo comparativo entre os métodos Adaptado de Normalização e Exponencial.
...66 Tabela 8 – Dados sobre o cenário escolhido – capacidade, vôos, demanda – (NAUFAL,
2005)...76 Tabela 9 – Definição dos tempos nos aeroportos, setores internos e externos...78 Tabela 10 – comparativo: MOD sem controle da pressão seletiva e o método do Escalamento
Linear;...87 Tabela 11 – Definição dos valores para média pressão seletiva...90 Tabela 12 – Exemplo dos dados da saída auxiliar para ajuste da pressão seletiva...92 Tabela 13 – Valores adotados para a etapa de pressão seletiva constante de acordo com o
processo de calibração...100 Tabela 14 – Comparativo: MOD sem controle da pressão seletiva e métodos com pressão
seletiva constante...103 Tabela 15 – Pontos escolhidos para mudança do tipo de pressão seletiva ...112 Tabela 16 – Comparativo: MOD sem controle da pressão seletiva e métodos com pressão
seletiva variável. ...114 Tabela 17 – Comparativo: MOD sem controle da pressão seletiva e simulações
ACC – Area Control Center (Centro de Controle de Aérea). APP – Approach Control (Controle de Aproximação). AS – Alert Service (Serviço de Alerta).
ATC – Air Traffic Control (Controle de Tráfego Aéreo). ATS – Air Traffic Service (Serviço de Tráfego Aéreo).
CGNA – Centro de Gerenciamento de Navegação Aérea.
CINDACTA – Centro Integrado de Defesa Aérea e Controle de Tráfego Aéreo.
CPS – Controle de Pressão Seletiva.
CTR – Control Terminal Region (Zona de Controle.)
DEPV – Diretoria de Eletrônica e Proteção ao Vôo.
DECEA – Diretoria de Controle do Espaço Aéreo.
DPMC – Desvio Padrão da Função Objetivo dos Melhores Cromossomos.
DPP – Desvio Padrão da Função Objetivo Populacional.
EL – Método do Escalamento Linear.
Exp – Método Exponencial
FAA – Federal Aviation Administration (Administração Federal de Aviação).
FIS – Flight Information Service (Serviço de Informação ao Vôo).
GAS – Grupo de Análise de Segurança.
IA – Inteligência Artificial.
IDE – Integrated Drive Electronics
IFR – Instrument Flight Rules (Regras de Vôo por Instrumento).
LCCA – Laboratório de Computação Cientifica Avançada.
MFOMC – Média dos Valores de Função Objetivo do Melhores
Cromossomos.
MFOP – Média do Valor da Função Objetivo Populacional.
MOD – Modelo de Otimização de Demanda.
NA – Método Adaptado de Normalização.
NMGC – Número Médio de Gerações Criadas.
PO – Pesquisa Operacional.
RN – Método do Ranking Normalizado.
RPL – Repetitive Flight Plans (Planos de Vôos Repetitivos). SAS_NuATFM_FMP – Air Traffic Flow Management - Flow Management Point.
SCSI – Small Computer System Interface.
SRPV – Serviço Regional de Proteção ao Vôo.
TMA – Terminal Movement Areas (Aérea Terminal).
TMP – Tempo Médio de Processamento de Cada Simulação.
TTP – Tempo Total de Processamento.
TWR – Tower Control (Torre de Controle).
USP – Universidade de São Paulo.
Ns – Número de Aeronaves simultâneas.
f – Fator de disponibilidade.
d – Distância média percorrida por uma aeronave em um Setor. n – Número médio de comunicações de cada aeronave.
tm – Tempo média de duração de cada mensagem.
Vm – Velocidade média das aeronaves.
T – Tempo médio de permanência.
km – Quilometro.
Sel
P – Probabilidade de Seleção no método da Roleta.
) (i
FO – Função Objetivo do Indivíduo i.
N – Total de indivíduos em uma população.
– Somatória de um conjunto de elementos.
q – Número de cromossomos da população do torneio.
Ei – Número de vezes que se deseja selecionar o indivíduo i no Ranking Linear.
Qb – Valor do melhor indivíduo no Ranking Linear.
Qw – Valor do pior indivíduo no Ranking Linear.
Ri – Ranking do indivíduo i no Ranking Linear.
Pi – Probabilidade de seleção do indivíduo i no Ranking Linear.
PGi – Probabilidade de seleção do indivíduo i no Ranking Geométrico.
w – Probabilidade de seleção do melhor indivíduo no Ranking Geométrico.
w’ – Variável auxiliar no cálculo do Ranking Geométrico.
– Desvio padrão.
Ai – Valor de Adequação do indivíduo i no Nicho e Compartilhamento.
Fi – Valor da Função Objetivo do indivíduo i no Nicho e Compartilhamento.
λ – Função de compartilhamento no Nicho e Compartilhamento.
j
i X
X − – Distância Euclidiana entre os indivíduos i e j no Nicho e
Compartilhamento. )
(⋅
a – Valor de Adequação no Escalamento Linear.
) (⋅
amin – Valor adequado do menor indivíduo da população.
amed – Valor adequado do maior indivíduo da população.
min
f – Valor original do menor indivíduo da população.
med
f – Valor original da média dos indivíduos da população.
max
f – Valor original do maior indivíduo da população.
γ – Máximo de vezes que o melhor indivíduo tem sobre a média da população.
FNi – Valor de Adequação do indivíduo i na Normalização
Cn – Capacidade do Setor ou Aeroporto n
Rxy – Rota que integra os aeroportos x e y.
OCsn – Ocupação do Setor n
An – Aeroporto n.
t – Tempo
AEn – Aeronave n.
Ia – Intervalo de Amostragem
tpmax – Tempo de permanência máximo.
tpmin – Tempo de permanência
Real – Tempo Real de permanência da aeronave.
ts – Tempo de saída.
te – Tempo de entrada
tp – Tempo de permanência.
Bn – Base estimada para ESn e TDEn
ESn – Estouro de capacidade do setor n
TDEn – Tempo de duração do estouro do setor Sn.
k – Variável de controle da pressão seletiva.
– Distância entre os valores de função objetivo.
) (i
AR – Valor de Adequação do indivíduo i no Ranking Normalizado.
) (i
Ae – Valor de Adequação do indivíduo i no Exponencial.
FO – Função Objetivo.
1 INTRODUÇÃO
O transporte aéreo vem se tornando cada vez mais acessível a um grande número de pessoas
em todo o mundo. Para atender ao aumento da demanda, as operadoras tendem a ampliar o
número de seus vôos. Consequentemente, esse crescimento do tráfego aéreo gera
congestionamentos nos principais aeroportos do mundo, bem como nos setores aéreos
próximos a estes. Esse fator pode ser compreendido devido ao fato de que a atual capacidade
do sistema de transporte aéreo não acompanha o ritmo de crescimento da demanda, o que
tende a se agravar num futuro muito próximo.
Entre todos os subsistemas que compõem o sistema de navegação aérea, um dos mais afetados
com as grandes taxas de crescimento atual da demanda é o controle de tráfego aéreo.
Responsável direto pela segurança das aeronaves, passageiros, tripulantes e população em
geral, principalmente nos grandes centros urbanos, o controlador de trafego aéreo sofre
impacto direto do aumento de atividade no espaço aéreo, o que pode afetar o seu desempenho
e, conseqüentemente, pode comprometer o nível de segurança do sistema aeronáutico.
Para compensar a falta de recursos disponíveis gerada pela diferença da expansão da
infra-estrutura em comparação ao crescimento da demanda do tráfego aéreo, é necessário buscar
alternativas que possibilitem otimizar os recursos já existentes, com a finalidade de se obter
um aumento da capacidade do sistema de tráfego aéreo sem comprometer o nível de
segurança. O desenvolvimento de sistemas computacionais para o suporte à navegação e
gerenciamento do tráfego aéreo pode trazer um novo fôlego ao crescimento da demanda no
Este trabalho de pesquisa apresenta uma proposta de otimização de uma ferramenta
computacional, baseada em algoritmos genéticos, desenvolvida com o propósito de balancear
o fluxo da demanda em relação à capacidade dos setores aéreos, por meio do controle da
pressão seletiva nos algoritmos genéticos.
Os algoritmos genéticos são técnicas de busca por soluções em problemas complexos.
Desenvolvida na década de 1960, a técnica denominada de Algoritmo Genético (HOLLAND,
1992) é baseada na teoria da evolução das espécies, descrita por Charles Darwin (DARWIN,
2004). A teoria diz respeito a um processo originado pela criação de uma população, seguido
dos operadores de seleção, cruzamento e, em alguns casos, mutação dos indivíduos que
evoluem através das gerações.
Dentro desse processo evolutivo existe a influência que o contexto em que está inserida a
situação (problema) exerce sobre os indivíduos da população. Essa influência é denominada
pressão seletiva. A pressão seletiva imposta a uma população pode ser controlada por meio de
métodos de controle. O controle desta influência sobre a população, se realizado de maneira
coesa, pode proporcionar melhores resultados no decorrer do processo evolutivo (CARDOSO,
1998).
1.1 OBJETIVOS
O estudo de métodos para controle de pressão seletiva em algoritmos genéticos apresenta,
neste trabalho, dois objetivos principais. Ambos estão correlacionados e ligados a uma
aplicação complexa de caráter crítico quanto à segurança de vidas humanas.
O primeiro objetivo está relacionado à influência que o controle da pressão seletiva tem sobre
dos métodos de controle da pressão seletiva na aplicação de uma ferramenta baseada em
algoritmos genéticos, através da comparação dos resultados gerados por esta aplicação com e
sem o controle da pressão seletiva.
O segundo objetivo está relacionado diretamente com a aplicação da ferramenta escolhida
com os métodos de controle da pressão seletiva. Neste caso, a meta é otimizar a aplicação da
ferramenta, complementando-a e/ou aperfeiçoando-a com a inclusão dos métodos de controle
da pressão seletiva. A ferramenta utilizada para a aplicação do controle da pressão seletiva foi
o Modelo de Otimização de Demanda (MOD), proposto por Naufal (2005), que realiza um
balanceamento na demanda perante a capacidade em uma infra-estrutura aeronáutica.
Tal otimização mostra-se necessária, pois apesar de já ter sido verificado a sua viabilidade
técnica quanto à qualidade da solução do problema, há ainda uma incompatibilidade da
ferramenta quanto ao tempo que esta requer para gerar resultados satisfatórios.
1.2 MOTIVAÇÃO
O constante aumento do tráfego aéreo é um dos principais responsáveis por
congestionamentos, atrasos e, principalmente, pelo aumento nos riscos de colisão entre
aviões, tanto na superfície quanto no espaço aéreo próximo aos aeroportos de todo o mundo.
Estatísticas indicam que, somente na Europa, o número de vôos cresce cerca de 5% a 7% ao
ano. Dados da Administração Federal de Aviação norte-americana (Federal Aviation
Administration – FAA) demonstram que o fluxo de viagens aéreas nos Estados Unidos tende
a dobrar nos próximos 15 anos e que a maior parte dos aeroportos não está preparada para
A criação de novas técnicas e otimizações para soluções de problemas complexos, como esse,
vem se tornando um grande desafio no meio científico. O pesquisado John Holland
desenvolveu uma técnica para solução de problemas complexos, baseado na teoria da
evolução de Darwin. Essa técnica vem sendo empregada em diversas áreas, inclusive na
aeronáutica.
Dentro desse escopo enquadra-se uma pesquisa, desenvolvida dentro do Grupo de Análise de
Segurança (GAS), que utiliza a técnica de John Holland para amenizar o problema referente
ao desbalanceamento da demanda dentro dos setores aeronáuticos. O Estado da Arte mostra
que a aplicação do MOD pode ser inviabilizada em função do tempo de apresentação dos
resultados. A aplicação de técnicas de otimização de desempenho dos algoritmos genéticos
pode vir a melhorar o tempo de resposta desse tipo de ferramenta.
1.3 ESTRUTURA DA DISSERTAÇÃO
Capítulo 2 – Controle de Tráfego Aéreo.
Este capítulo traz as principais características do contexto aeronáutico relevantes ao controle
de tráfego aéreo. Nele é abordado o problema do balanceamento entre a capacidade e a
demanda dentro da infra-estrutura aeronáutica e o quanto isso pode afetar os controladores de
tráfego aéreo e a segurança de todo o sistema aeronáutico.
Capítulo 3 – Pressão Seletiva.
Este capítulo apresenta os conceitos de pressão seletiva e um estudo da relação desta com
controle da pressão seletiva, bem como suas relações e influências dentro dos algoritmos
genéticos.
Capítulo 4 – Estudo Complementar da Pressão Seletiva na Otimização do MOD.
No capitulo 4 são descritos o Modelo de Otimização de Demanda (MOD), desenvolvido por
Naufal (2005), seu contexto dentro do setor aeronáutico, características e função objetivo,
incluindo o cálculo de estresse (workload) do controlador de tráfego aéreo. Neste capítulo é
apresentada, também, a proposta para o controle de pressão seletiva no MOD, mostrando os
diversos métodos de controle selecionados, bem como suas características e adaptações para
implementação ao modelo.
Capítulo 5 – Aplicação dos Métodos de Controle da Pressão Seletiva na Otimização do
MOD.
Esse capítulo é constituído pelo estudo de caso da implementação dos métodos de controle da
pressão seletiva sobre o MOD e pelas análises dos resultados obtidos. O estudo é
compreendido por uma análise comparativa entre os métodos de controle da pressão seletiva
utilizados e uma outra análise comparativa com os resultados obtidos originalmente no MOD,
baseado na qualidade dos resultados e no tempo de simulação.
Capítulo 6 – Conclusão.
Neste capítulo são apresentadas as principais conclusões deste trabalho, assim como as
contribuições para a comunidade científica e as possíveis linhas de pesquisas para trabalhos
2 CONTROLE DE TRÁFEGO AÉREO
Neste capítulo é apresentada uma visão geral dos fundamentos básicos do tráfego aéreo, tendo
como intuito prover um conhecimento básico do problema abordado nesta pesquisa. Ainda
neste capítulo, é apresentado o reflexo do problema de demanda sobre os controladores de
tráfego aéreo.
2.1 OESPAÇO AÉREO
O uso do espaço aéreo há poucas décadas podia ser considerado ínfimo se comparado aos dias
atuais. No início do século XX, as aeronaves eram relativamente lentas e se limitavam a vôos
diurnos com boas condições de visibilidade, dado ao fato de a instrumentação aeronáutica ser
bastante primitiva. Os pilotos eram os únicos responsáveis pela separação entre as aeronaves,
contando apenas com a visão para navegarem e evitarem acidentes. Naquela época, a
imensidão aérea não era preocupante devido aos poucos vôos existentes.
Atualmente, a grande maioria dos vôos comerciais conta com um conjunto mais desenvolvido
de instrumentos e seguem os procedimentos das Regras de Vôo por Instrumentos (IFR).
Nestas condições, a responsabilidade de manter a separação das aeronaves é dos controladores
de tráfego aéreo (DEPV, 1999; OGATA, 2003). A realidade atual do espaço aéreo é
completamente diferente da realidade da primeira metade do século passado, principalmente
nas aéreas próximas aos aeroportos (aéreas terminais), onde existem altas densidades entre
vôos que desejam pousar e/ou decolar.
Apesar de todos os avanços tecnológicos das últimas décadas no setor aéreo, o espaço aéreo
que se denomina congestionamento do espaço aéreo, definido por Weigang et al. (2005) da
seguinte maneira
Um congestionamento será identificado quando vários vôos, aterrissando ou decolando, estiverem agendados para o mesmo tempo. Na realidade isso não ocorre, pois, em nenhuma hipótese mais de uma aeronave pode ocupar a mesma pista simultaneamente. Em função disso, alguns vôos devem ser atrasados ou retidos no ar. Quanto maior a possibilidade de congestionamento, maior o atraso.
Weigang et al. (2005) ainda destaca que desde a década de 1970, áreas de pesquisa, tais como
a de inteligência artificial (IA), pesquisa operacional (PO) e transportes aéreos, trabalham
juntas para desenvolver soluções para o controle de tráfego aéreo e para o gerenciamento do
tráfego aéreo. Porém, devido à complexidade do gerenciamento do fluxo de tráfego aéreo e à
necessidade de soluções em tempo real, a eficiência dos sistemas inteligentes depende da
computação, esbarrando nas necessidades críticas de escalabilidade, sincronização e
principalmente segurança (safety). O pesquisador observa que existe a necessidade de
aprimoramento dos sistemas computacionais atuais, a fim de torná-los mais eficientes na
redução dos atrasos nos vôos.
2.2 FASES DE OPERAÇÃO DE VÔO IFR
As regras de operação de vôo em procedimento IFR adotado pela grande maioria dos vôos
comerciais no mundo, seguem padrões internacionais adaptados para atender às necessidades
locais do tráfego aéreo. O procedimento IFR pode ser dividido em fases. Em cada fase, o
órgão de controle está sempre presente, autorizando, monitorando ou instruindo, para
assegurar um vôo eficiente e seguro (safety). A Tabela 1 apresenta e descreve cada uma das 8
Pré-Vôo
Para todo vôo IFR deve haver um plano de vôo, normalmente apresentado a um órgão ATC (Controle de Tráfego Aéreo) com certa antecedência ao vôo. O plano de vôo contém informações específicas sobre o vôo, tais como, identificação da aeronave, aeródromo de origem e de destino, horário de partida e previsão do tempo de vôo, equipamentos de segurança e sobrevivência, etc.
Táxi
Após receber permissão para acionar os motores, a aeronave recebe autorização do controle de solo para taxiar. O controle de solo é responsável pelo controle desta aeronave até a sua chegada à cabeceira da pista, onde se finda a fase de táxi.
Decolagem
Ao chegar à cabeceira da pista, a aeronave aguarda da torre de controle (TWR) autorização para decolar. Assim que recebe a ordem, dá-se início a fase de decolagem. Essa fase dura até o vôo cruzar uma dada altitude. Nesse instante, a aeronave deixa o controle TWR e estabelece contato com o controle de aproximação (APP).
Saída do APP
No instante em que a aeronave finaliza a subida inicial, ainda sobre responsabilidade do APP, a aeronave continua em ascendência, rumo à aerovia definida no plano de vôo. A fase de saída do APP liga a aérea terminal (TMA) à aerovia.
Em Rota
Ao sair do APP origem, a aeronave inicia o vôo em cruzeiro pela aerovia escolhida, passando a estar sob vigilância do centro de controle de aérea (ACC). Quando na aerovia, a aeronave ajusta sua altitude e velocidade. Esta fase pode durar desde alguns minutos até muitas horas, terminando quando é atingido o APP destino.
Aproximação Inicial
A aproximação é a fase que interliga o vôo em rota à área terminal de destino. Dessa forma, a aeronave deixa o controle do ACC e passa ao controle do APP destino. Caso o terminal esteja congestionado é realizado um processo de fila para pouso, garantindo o espaçamento mínimo entre as aeronaves.
Aproximação Final
Esta fase se dá quando o vôo cruza uma dada distância e altitude em relação ao aeroporto de destino. Nesta fase, o controle é passado do APP destino para a TWR, que irá autorizar a aeronave a aterrissar. A fase dura até o momento que a aeronave toca a pista de pouso.
Pouso e Táxi
2.3 ADIVISÃO DO ESPAÇO AÉREO
Com o avanço tecnológico das aeronaves, os destinos dos vôos passaram a ser cada vez mais
distantes de suas origens, ultrapassando fronteiras entres os países e até os oceanos, gerando
grande comodidade e ganhos, principalmente de tempo. O transporte aéreo se tornou uma
opção certa no transporte de passageiros e de carga, crescendo consideravelmente, ao longo
dos anos.
A divisão do espaço aéreo se tornou fundamental, principalmente para o âmbito do controle e
vigilância, para organizar e tornar o sistema aeroviário mais rápido e especialmente seguro
(safety). Dessa forma, em 1944, na convenção de Chicago, foi idealizada a criação de uma
organização internacional, a OACI (Organização de Aviação Civil Internacional) instituída
em 1947, com sede em Montreal, no Canadá. A OACI é responsável pelo incentivo e
estabelecimento de padrões, práticas e procedimentos. Os Estados pertencentes à organização
apresentam todas as alterações e suas razões para as adequações sobre as recomendações da
OACI (ARAÚJO, 2000; OGATA, 2003).
No Brasil, os serviços relacionados ao vôo estão dispostos na Lei nº. 7.565 de 19 de dezembro
de 1986, do Código Brasileiro de Aeronáutica, substituindo o Código Brasileiro do Ar. As
normas recomendadas pela OACI são adotadas, com as devidas restrições, pelo Governo
Brasileiro. O Comando da Aeronáutica é responsável pela navegação aérea no Brasil, o qual é
representado pela antiga Diretoria de Eletrônica e Proteção ao Vôo (DEPV) e atual Diretoria
de Controle do Espaço Aéreo (DECEA), que por sua vez é representado por meio dos centros
denominados de Serviços Regionais de Proteção ao Vôo (SRPV). Os SRPV, em conjunto
com o Centro Integrado de Defesa Aérea e Controle de Tráfego Aéreo (CINDACTA), são
relacionadas com os produtos de interesse na proteção ao vôo (ARAÚJO, 2000; OGATA,
2003; SIEWERDT, 2000).
A divisão do espaço aéreo é realizada de duas formas: divisão horizontal e divisão vertical do
espaço aéreo. A divisão vertical do espaço aéreo compreende o espaço aéreo inferior (abaixo
de 24.500 pés) e o espaço aéreo superior (acima de 24.500 pés). No espaço aéreo inferior
encontram-se os aeroportos e as aéreas terminais. No espaço aéreo superior encontram-se as
aerovias, onde as aeronaves realizam a fase de vôo denominada de cruzeiro, o qual foi
descrita com maior detalhe no item 2.2 “Fases de Operação de Vôo em IFR” (OLIVEIRA,
2003; NAUFAL, 2005).
A divisão horizontal do espaço aéreo é realizada em grandes aéreas, podendo estar ou não
coberta por radares e um sistema de processamento de dados. De acordo com DEPV (1999) e
Ogata (2003), no Brasil o espaço aéreo é dividido em:
− Espaço Aéreo Não Controlado – trata-se de um espaço aéreo não controlado por um
órgão de controle ATC. Nesse espaço aéreo a responsabilidade em manter a separação
entre as aeronaves é exclusiva dos pilotos, ou seja, a segurança dos vôos não é de
responsabilidade do ATC;
− Espaço Aéreo Controlado – Administrado pelo DECEA, corresponde ao espaço aéreo
onde existe um ATC e, portanto, a responsabilidade pela organização do trafego aéreo,
bem como a separação entre as aeronaves, deixa de ser função exclusiva do piloto e
passa a ser do controlador de tráfego aéreo. No Brasil, segundo o DEPV (1999), o
− Espaço Aéreo Condicionado – são espaços aéreos definidos, indicados nos manuais do
DEPV. Essas áreas têm circulação controlada e são classificadas de acordo com
características e configurações variáveis indicadas nas cartas e manuais publicados
pela DEPV. Estas aéreas de espaço aéreo podem ser classificadas como: aéreas
proibidas, aéreas perigosas ou áreas restritas.
2.4 CONTROLE DE TRÁFEGO AÉREO
O Serviço de Tráfego Aéreo (ATS), serviço prestado em todo o território nacional, é dividido
em 3 áreas: o Serviço de Alerta (AS), o Serviço de Informação ao Vôo (FIS) e o Controle de
Tráfego Aéreo (ATC).
O AS é um serviço prestado por um órgão ATS que tem jurisdição sobre o espaço aéreo em
questão. Esse serviço é proporcionado tanto para vôos com procedimento VFR (Regras de
Vôo Visual) quanto IFR, desde que sejam de conhecimento do ATS, em toda a jurisdição
brasileira. O serviço FIS é bastante complexo e abrangente, presta todo o tipo de informação,
como as condições meteorológicas, auxílios à navegação, serviços de informação de tráfego
aéreo, entre outros, visando a execução segura dos vôos de todas as aeronaves. O FIS é
prestado por todos os setores de ATS, desde que este tenha ciência do vôo (DEPV, 1999;
OGATA, 2003).
O serviço mais importante para o fluxo contínuo, ordenado e seguro dentro do espaço aéreo
para os vôos é o ATC (DEPV, 1999). O controle de tráfego aéreo gerencia o vôo no solo do
aeroporto de origem, na decolagem, no vôo em cruzeiro, na aterrissagem e na movimentação
em solo do aeroporto de destino. Segundo Almeida Junior et al. (2005), DEPV (1999) e
− Serviço de controle de área (ACC) – tem por finalidade a prestação de serviço de
monitoramento e gerência de aeronaves sobre regra IFR durante a fase de cruzeiro,
com a finalidade de prevenir colisão entre aeronaves, ordenando o fluxo de tráfego
aéreo. Esse serviço pode ser eventualmente prestado por um órgão APP, ao qual tenha
sido delegada a atribuição, que em conjunto com o TWR, está subordinado ao ACC
responsável pela região em que estão localizados. Normalmente esse centro de
controle ACC recebe os vôos de um setor APP origem e entrega a um setor APP
destino;
− Serviço de Controle de Aproximação (APP) – tem as mesmas finalidades do ACC,
mas com algumas atribuições. Entre as atribuições estão as autorizações aos vôos com
regra IFR e VFR a trafegarem dentro da TMA ou de uma Zona de Controle (CTR),
objetivando manter a separação mínima entre aeronaves, orientar e instruir em
procedimento de espera, chegada e saída. Esse serviço pode estar ou não disponível
dentro de um ATC, dependendo da demanda. Em caso de não haver esta facilidade, o
serviço é promovido pela TWR. Em casos nos quais a demanda exija o serviço, ele
monitora alguns quilômetros nas proximidades dos aeroportos, podendo atender
diversos aeroportos ao mesmo tempo; e
− Serviço de Controle de Aeródromo (TWR) – com o objetivo de evitar abalroamento
entre as aeronaves que estão manobrando, pousando, decolando ou mesmo voando nas
vizinhanças do aeroporto, a TWR transmite informações e autorizações às aeronaves e
veículos sob seu controle. Dessa forma, a TWR comanda qualquer movimento em
solo e em vôo com aproximadamente 9 km ao redor do aeroporto. A TWR ainda é
responsável, entre outras coisas, por notificar o APP e o ACC sobre alertas de
com aeronaves, entre outros. Possui ainda a função de autorizar pessoas ou veículos
nas áreas de manobras.
Devido ao tamanho e à complexidade das aéreas de controle, elas são fragmentadas em áreas
menores, denominadas setores. Cada setor do espaço aéreo está sob controle de um único
serviço do ATC, e cada setor de cada ATC está sob responsabilidade de um controlador de
tráfego aéreo, que pode contar ou não com um assistente. Um assistente pode assumir o
controle do tráfego aéreo a qualquer instante. Os setores pertencentes às aéreas de APP são
denominados de aérea de controle terminal ou setores APP. Os setores que pertencem às áreas
de controle ACC são denominados setores ACC, podendo fazer parte do espaço aéreo
superior e/ou inferior (DEPV, 1999; NAUFAL, 2005; OLIVEIRA, 2003).
2.5 CAPACIDADE DE TRÁFEGO NOS SETORES AÉREOS
A capacidade dos setores aéreos é definida por meio do cálculo do número máximo de
aeronaves que podem ser controladas, simultaneamente, por um único controlador de tráfego
aéreo. Esse cálculo e suas premissas estão estabelecidos no Manual do Ministério da
Aeronáutica (MMA 100-30 - Planejamento de Pessoal ATC e Horário de Trabalho) (DEPV,
1990).
Para subdividir o espaço aéreo, é necessário realizar um estudo minucioso sobre os dados
estatísticos de movimento e suas projeções para um determinado período de tempo. Esta
análise deve levar em conta as características da rede ATS, tais como o número de rotas e
suas intersecções, a proporção de vôos nivelados e o desempenho das aeronaves.
O volume de tráfego atribuído às posições TWR, APP e ACC são avaliados com base no
nos setores APP e ACC, e a carga máxima de movimentos simultâneos atribuídos a cada
controlador de tráfego aéreo. Nos horários de pico, todas as posições operacionais do ATC
deverão estar ativas, bem como, quando as condições do tráfego permitirem deverá ser
realizado o agrupamento de setores e rodízio dos controladores.
Para a criação de novos setores, com o objetivo de dividir a carga de trabalho dos
controladores de tráfego aéreo, deve-se observar se a coordenação entre os controladores não
irá produzir uma sobrecarga de trabalho de tal modo que o objetivo proposto para a divisão
não seja atingido. Outros importantes fatores que devem ser levados em consideração na
análise dos resultados são: a distribuição geográfica do tráfego aéreo e a capacidade dos
controladores de tráfego.
2.5.1 Controle APP e ACC
A quantidade de aeronaves controladas, simultaneamente, em um setor depende da estrutura
das rotas ATS contidas no setor e, principalmente, do tipo, se é um setor APP ou um setor
ACC.
No caso do setor pertencente ao ACC, para definir o número máximo de aeronaves, deve-se
observar o nivelamento dos vôos, o sentido da aeronave (único ou duplo) e o número de
cruzamentos. Por exemplo, em um setor ACC onde existam muitos pontos de intersecção e
necessidade de se estabelecer separação de tráfego em ambos os sentidos, a capacidade do
controlador é inferior, se comparada a um setor onde os vôos são nivelados e em sentido
único.
Em um setor APP, as aeronaves encontram-se na etapa mais crítica do vôo. Nesse setor o
características impõem que o número de aeronaves simultâneas em um setor APP seja
consideravelmente menor que em um setor ACC. Dessa forma, é de suma importância a
integração dos serviços do ACC com o respectivo APP para que se permita a utilização mais
próxima da capacidade do setor APP.
2.5.2 Cálculo para o Número de Aeronaves Simultâneas em um Setor
A definição do número máximo de aeronaves que podem ser controladas simultaneamente por
um único controlador de tráfego aéreo está diretamente ligada aos fatores de disponibilidade
do controlador e à distância média percorrida pelas aeronaves dentro de um dado setor Sn.
Esse número de aeronaves está inversamente ligado ao número de comunicações para cada
aeronave, ao tempo médio de permanência de cada aeronave dentro do setor Sn e à velocidade
média das aeronaves no setor Sn.
Baseada nesses dados, a equação 1 define o modelo matemático para o cálculo do número
máximo de aeronaves controladas simultaneamente (Ns) por um único controlador de tráfego
aéreo (DEPV, 1990).
Vm tm n
d f Ns
⋅ ⋅
⋅
= (1)
Considera-se neste modelo, por simplicidade, que os valores referentes à duração das
comunicações e das velocidades são valores médios.
Onde:
− f = fator de disponibilidade. Percentual do tempo dedicado exclusivamente às
comunicações com aeronaves;
− d = distância média, em milhas náuticas, percorrida pelas aeronaves no Setor Sn;
− tm = tempo médio de duração de cada mensagem, dado em segundos; e
− Vm = velocidade média das aeronaves, em nós.
O modelo matemático pode ser simplificado, considerando a equação 2.
T Vm
d
= (2)
Onde T é o tempo médio, em segundos, de permanência das aeronaves no setor Sn. Dessa
forma, o cálculo de N simplificado é dado pela equação 3.
tm n
T f Ns
⋅ ⋅
= (3)
Para melhor entendimento do modelo, foi apresentado um exemplo da aplicação, utilizando
valores médios sugeridos no MMA 100-30 (DEPV, 1990) em um setor Sn do APP sem
assistente:
f = 60%
n = 6 6 15"
" 720 6 , 0
⋅ ⋅ = Ns
tm = 15 segundos
T = 12 minutos (720 segundos)
8 , 4
= Ns
No exemplo, o número máximo de aeronaves controladas simultaneamente por um único
controlador em um setor Sn pertencente ao APP considerado é de 5 aeronaves1.
1 Critério de arredondamento adotado pelo MMA 100-30 (DEPV, 1990):
− Para valores decimais de Ns<5 - arredondar para inteiro inferior.
5
2.6 CRESCIMENTO DA DEMANDA NO TRÁFEGO AÉREO
O constante aumento do tráfego aéreo é um dos principais responsáveis pelos
congestionamentos, atrasos e principalmente pelo aumento nos riscos de colisão entre aviões,
tanto na superfície, quanto no espaço aéreo próximo aos aeroportos de todo o mundo. Dados
da Administração Federal de Aviação (FAA) norte-americana demonstram que o fluxo de
viagens aéreas nos Estados Unidos tende a dobrar nos próximos 15 anos, e que a maior parte
dos aeroportos não está preparada para enfrentar tal situação (FAA, 2004).
No espaço aéreo brasileiro a situação não é diferente. Cerca de 50 milhões de passageiros por
ano transitam atualmente no Brasil. Somente o tráfego nacional é responsável por mais de
quatro bilhões de toneladas de mercadorias /km /ano e mais de 26 milhões de passageiros
embarcados anualmente. A Tabela 2 apresenta o movimento de passageiros no aeroporto
Internacional de Congonhas, no período de 1990 até 2002. Nesses 12 anos, nota-se que seu
movimento de passageiros aumentou de cerca de 2,5 milhões de passageiros em 1990 para
mais de 12 milhões em 2002. Isso significa um crescimento de aproximadamente 5 vezes, ou
seja, um acréscimo de 491,70% no total geral de transporte de passageiros em vôos regulares
AEROPORTO: Internacional de Congonhas / São Paulo ICAO: SBSP
MUNICÍPIO: São Paulo UF: SP
Movimento de Passageiros (Embarcado + Desembarcados) – Histórico
Regular Não Regular Total Geral
Ano
Doméstico Internacional Doméstico Internacional Av. Geral
1990 2.456.949 - 75.623 - - 2.532.572
1991 2.666.002 - 60.342 - 4.563 2.730.907
1992 2.369.179 - 66.528 - 1.316 2.437.023
1993 2.628.250 - 197.112 - 2.506 2.827.868
1994 2.951.418 - 522.425 - 27.236 3.501.079
1995 3.941.414 - 789.584 - 39.331 4.770.329
1996 4.885.670 - 558.124 - 34.737 5.478.531
1997 5.579.600 - 525.213 - 33.332 6.138.145
1998 7.281.940 - 475.574 - 38.190 7.795.704
1999 9.687.450 - 441.032 - 27.767 10.156.249
2000 10.012.692 - 622.341 - 24.175 10.659.208
2001 10.797.420 - 1.148.120 - 14.479 11.960.019
2002 10.567.477 - 1.870.794 - 14.389 12.452.660
Fonte: Boletim de Informações Gerenciais da INFRAERO – BIG -: Não operou no aeroporto
Tabela 2 – Movimento de Passageiros no Aeroporto de Congonhas (IAC, 2003).
2.7 CONTROLADOR DE TRÁFEGO AÉREO
O controlador de tráfego aéreo é o profissional responsável pelo gerenciamento do tráfego
aéreo nos aeroportos, áreas de aproximação e espaço aéreo superior, realizado de forma que
haja uma separação mínima e segura entre as aeronaves e uma ordenação do tráfego aéreo em
todo o espaço controlado. Ontiveros (2003) considera que, na realidade, o controlador de
tráfego aéreo tem o papel de um “guardia de tráfico”, ou seja, um guarda do tráfego ou do
trânsito aéreo. O autor ainda se refere ao trabalho desempenhado pelos controladores de
tráfego aéreo como único, e em nenhuma outra profissão há concentração e responsabilidade
Para exercer todas as suas atribuições, é necessário que esses profissionais possuam grandes
habilidades cognitivas, tais como percepção espacial, grande processamento de informações
em pouco espaço de tempo e tomada de decisões em tempo hábil. Todas essas atividades
tornam a profissão extremamente desgastante, impondo altos níveis de estresse (ARAÚJO,
2000; NAUFAL, 2005).
Outros fatores que afetam os profissionais do controle de tráfego aéreo e contribuem para o
aumento do estresse estão relacionados aos novos processos de trabalho. Esses processos são
conseqüências do aumento do número de vôos e do número de passageiros, do aumento da
velocidade das aeronaves e da necessidade de constantes adaptações aos novos sistemas
automatizados (ARAÚJO, 2000).
2.7.1 Carga de Trabalho do Controlador de Tráfego Aéreo
Estudos apontam que a carga de trabalho do controlador de tráfego aéreo vem gerando um
alto nível de estresse. Em um desses estudos, elaborado pelo Laboratório de Psicologia do
Núcleo do Instituto de Ciências da Atividade Física (NuICAF), desenvolveu-se um
instrumento intitulado "Questionário Diagnóstico de Necessidades Organizacionais Relativas
à Atividade de Controlador de Tráfego Aéreo" (1999), que foi utilizado no trabalho:
“Sintomas de estresse e estratégias de defesa: Uma proposta de intervenção em controladores
de tráfego aéreo” (RIBEIRO; ASSIS; LOTERIO, 2000). Nesse trabalho, os pesquisadores
afirmam que
2.7.2 Segurança e o Controlador de Tráfego Aéreo.
O controle de tráfego aéreo, assim como as usinas nucleares e os complexos petroquímicos,
são processos tecnológicos de alto risco, nos quais a ocorrência de falhas pode culminar em
um evento de caráter catastrófico. Um acidente em um desses ambientes tem como
conseqüência um impacto considerável, pondo em risco muitas vidas humanas. (ARAÚJO,
2000).
Holnagel (1993) destaca em seu trabalho que, com os avanços tecnológicos da informação, a
confiabilidade dos componentes tem aumentado, tornando o homem o elo mais fraco na
cadeia da confiabilidade. Porém, na visão de Araújo (2000) e Leplat e De Terssac (1991) não
há dúvidas quanto à importância dos controladores para a confiabilidade e segurança de um
sistema no qual as tomadas de decisões finais e em tempo real devem conduzir a uma situação
segura pois estão relacionadas a vidas humanas
Entre os fatores de maior relevância na segurança do controle de tráfego aéreo está a carga de
trabalho do controlador. Meshkati et al. (1995) define que a carga de trabalho representa o
custo para o operador humano atingir um determinado desempenho na função que está
executando. Porém, se este nível de desempenho desejado for elevado ou se na sua função for
necessário, para o desempenho das suas atividades, um nível ótimo de estado de alerta, isso
pode gerar altos níveis de estresse. De certa forma, esse estresse pode ser positivo ou negativo
para o profissional. Pelo lado positivo, o estresse pode gerar um aumento no desempenho da
qualidade do serviço prestado, mas, em contrapartida, o estresse acarreta um quadro de fadiga,
o que irá degradar a sua atuação, diminuindo a segurança do serviço de controle de tráfego
2.8 CONSIDERAÇÕES FINAIS DO CAPÍTULO
Os fundamentos sobre o tráfego aéreo, apresentados neste capítulo, forneceram os conceitos
fundamentais para o entendimento do problema de demanda utilizado dentro do estudo de
casos deste trabalho de pesquisa. Neste contexto, deu-se ênfase ao controle de tráfego aéreo,
principalmente do ponto do vista do controlador de tráfego aéreo. Ainda neste capítulo, foi
abordado o problema gerado pelo crescimento da demanda aeroviária e as suas conseqüências
na carga de trabalho do controlador de tráfego aéreo. No próximo capítulo, serão apresentados
os conceitos e os métodos de controle da pressão seletiva, que serão utilizados na otimização
3 PRESSÃO SELETIVA
Este capítulo apresenta os principais conceitos de pressão seletiva, bem como sua estreita
relação com os conceitos dos algoritmos genéticos, apresentados no Apêndice2 A. São
também apresentados os métodos de controle da pressão seletiva e sua influencia dentro do
processo evolutivo.
A pressão seletiva é um fator de alta relevância dentro da teoria da evolução, no qual os
indivíduos selecionados para passarem o seu material genético sofrem diretamente a sua
interferência.
3.1 INTRODUÇÃO
A pressão seletiva é o termo designado para a influência que o meio ambiente tem na seleção
dos genes. A variação das condições impostas pelo meio ambiente onde vivem esses
organismos fará com que alguns genes tenham maior ou menor probabilidade de passarem
para as próximas gerações. A pressão seletiva representa um conjunto de características do
meio ambiente imposta à população e que irá direcionar a evolução de determinadas
características para se adaptarem a esse meio ambiente.
A pressão seletiva constitui-se num fator externo impondo suas restrições à população. Por
exemplo, o desenvolvimento de uma membrana entre os dedos dos animais que vivem em
meio aquático. Uma pressão seletiva favorece as mutações, provocando o aparecimento
dessas membranas, permitindo a esses animais que se desloquem mais rapidamente. Por outro
lado, se uma população perde a influência de uma dada pressão seletiva, os indivíduos perdem
as características que os fizeram evoluir. Dessa forma, as funções desenvolvidas pela
influência da pressão seletiva deixarão de atuar, degenerando-se até deixarem de existir. Por
exemplo, uma população de peixes que vive no fundo de cavernas fica cega devido à
inexistência de luz, desenvolvendo outro método sensitivo que irá substituir a função da visão
(BARCELLOS, 2000).
Baseado nos conceitos naturais sobre pressão seletiva, pode-se, nos algoritmos genéticos,
determinar a influência que o meio ambiente exerce sobre uma dada população, bem como
controlar essa influência. Por meio dos valores de adequação (fenótipo) dos indivíduos, que é
a única informação em que o algoritmo genético se baseia para o processo evolutivo, pode-se
classificar a pressão seletiva imposta à população.
Quando os valores de aptidão dos indivíduos são próximos significa que a probabilidade de
sobrevivência entre os indivíduos é similar, ou seja, todos têm chances parecidas de passarem
suas características genéticas para as futuras gerações, caracterizando uma pressão seletiva
baixa. Por outro lado, quando os valores de adequação são muito distintos, a probabilidade
dos melhores indivíduos serem selecionados (com os maiores valores de adequação, quando
se está maximizando a função), é muito superior à dos piores indivíduos (os com baixas
probabilidades de sobrevivência). Portanto, os melhores terão mais chance de sobreviver e de
passar suas características aos seus descendentes, caracterizando uma alta pressão seletiva.
Dentro dos algoritmos genéticos existem conceitos que estão fortemente ligados. Assim,
qualquer alteração, aleatória ou intencional, em algum deles, irá gerar conseqüências aos
demais. A seguir, foi realizado um estudo dos conceitos relacionados com a pressão seletiva,
3.2 RELAÇÃO DA PRESSÃO SELETIVA COM OUTROS CONCEITOS DOS ALGORITMOS GENÉTICOS
Para melhor entender a relação dos conceitos dos algoritmos genéticos com a pressão seletiva,
procurou-se distinguir ao máximo as características pertinentes a cada um dos conceitos,
apesar da forte ligação entre eles. Entre os conceitos estudados, destacam-se a velocidade de
convergência, a direção da evolução e a diversidade populacional.
3.2.1 Velocidade de Convergência
A velocidade de convergência é o termo designado ao tempo que o algoritmo genético utiliza
para tender a um máximo da função que está sendo otimizada. A velocidade e o máximo
alcançado são fatores fortemente ligados. No caso onde o algoritmo genético realiza uma
convergência muito rápida para um ponto de máximo, ou seja, em poucas dezenas de
gerações, ele estabiliza em uma determinada aérea do espaço de busca. Essa região pode não
corresponder a um máximo global dentro da função, mas sim apenas a um ponto de máximo
local (TANOMARU, 1995).
A pressão seletiva e a diversidade populacional são fatores de influência direta na velocidade
de convergência. As conseqüências variam de acordo com o tipo da pressão seletiva impostas
pelo meio ambiente sobre a população. Quando o meio impõe uma pressão seletiva baixa,
devido à proximidade dos valores de adequação, o algoritmo genético leva muito tempo para
convergir para a região do máximo global. O motivo, para o elevado tempo de convergência,
é não haver indivíduos que se destaquem e que sejam capazes de guiar a evolução no sentido
do máximo global.
Quando o meio impõe uma pressão seletiva alta, os indivíduos mais aptos dominam as
adiante, se espalhando rapidamente e contaminando toda a população. A conseqüência é uma
queda na diversidade populacional e um aumento da velocidade de convergência para um
máximo, local ou global (BARCELLOS, 2000).
Estabelecer o controle da pressão seletiva, agindo como se fosse o meio ambiente, pode
contribuir para diminuir ou aumentar a velocidade de convergência, conforme se deseja
vasculhar melhor o espaço de soluções para encontrar os melhores genes ou ressaltar as
características dos melhores indivíduos. Com a correta utilização das influências da pressão
seletiva na velocidade de convergência, pode-se otimizar o tempo de simulação, evitando que
o algoritmo genético convirja para os máximos locais, mas sim encontrando o máximo global
no menor tempo.
3.2.2 Direção da Evolução
A direção da evolução é o caminho que o algoritmo genético irá tomar dentro do espaço de
soluções em busca do máximo global. O ideal é que o algoritmo genético inicie o processo de
busca através de diversos pontos dentro do universo de soluções e siga através do processo
evolutivo, de geração a geração, em direção à região do máximo global. No caso da direção
adotada pelo algoritmo genético ser a do máximo global, os resultados finais, se não forem a
solução do problema, estarão muito próximos dela. Por outro lado, caso a direção adotada
pelo algoritmo genético, no decorrer da busca, não seja no sentido da região do máximo
global, os resultados finais não irão solucionar da melhor forma o problema em questão.
A pressão seletiva exerce também nesse conceito do algoritmo genético a sua influência.
Desse modo, se a pressão seletiva imposta pelo meio ambiente sobre a população for nula,
tornará o processo evolutivo totalmente aleatório, ou seja, se todos os indivíduos da população
da população para que possa guiar o processo evolutivo. Por outro lado, se a pressão seletiva
for muito alta, uma pequena parcela da população terá o domínio sobre praticamente toda a
probabilidade de sobrevivência, acabando por restringir demais a direção da evolução,
podendo levar o algoritmo a um máximo que não seja o global (BARCELLOS, 2000).
3.2.3 Diversidade populacional
A diversidade populacional, também denominada de diversidade genética, é o quão distintas
são as características dos indivíduos dentro da população. Dentro do universo de soluções é
importante que se tenha o maior número de informações sobre o espaço. Quanto maiores
forem as diferenças entre os indivíduos, ou seja, maior diversidade populacional, maior será a
área explorada. A concentração de indivíduos em uma determinada região do espaço
caracteriza uma população com baixa diversidade populacional.
De acordo com Fregni (1997), pode-se definir uma métrica referente à diversidade
populacional calculada a partir do número de alelos existentes na população dividida pelo
número de alelos possíveis no espaço de soluções. Portanto, a diversidade genética pode ser
definida como a variação desses alelos dentro da população.
A influência da pressão seletiva dentro da diversidade populacional, bem como nos outros
conceitos, gera conseqüências distintas conforme o tipo de pressão aplicada à população. No
caso de uma baixa pressão seletiva, o meio ambiente permite que toda a população tenha uma
boa probabilidade de sobreviver. Isso facilita, com ajuda do operador de mutação, o aumento
da diversidade populacional gerada devido à troca de genes entre toda a população. Com o
aumento da diversidade e baixa da pressão seletiva, a velocidade de convergência irá se
Quando a pressão exercida pelo meio ambiente for alta, beneficiando os mais aptos e
aumentando a velocidade de convergência, haverá uma queda na diversidade populacional.
Nesse caso, somente os mais aptos farão proliferar seu material genético. Dessa forma,
quando a população se encontrar na região de um máximo local, a queda da diversidade
populacional irá dificultar muito o algoritmo genético a sair desse ponto em busca do máximo
global da função (FÁVARO, 1999; TANOMARU, 1995).
Observando a ligação entre a pressão seletiva e a diversidade populacional, pode-se dizer que
se tratam de duas forças opostas dentro do algoritmo genético. Portanto, o balanceamento
adequado entre elas é benéfico para a obtenção de resultados satisfatórios na busca de
soluções em problemas complexos (BARCELLOS, 2000; FÁVARO, 1999).
Após investigar a ligação da pressão seletiva e suas influências com alguns dos principais
conceitos dentro do processo evolutivo, entende-se como relevante o controle adequado da
pressão seletiva na geração de benefícios, aumentando, por exemplo, o desempenho do
algoritmo genético na busca por soluções de problemas complexos.
3.3 CONTROLE DA PRESSÃO SELETIVA
Conforme visto anteriormente, a pressão seletiva é dada pela distribuição das probabilidades
dos indivíduos de sobreviverem no meio ambiente. Quando as probabilidades dos indivíduos
estão com uma distribuição uniforme, a pressão seletiva é baixa, ou seja, todos os indivíduos
da população têm chances similares de sobreviverem. Por outro lado, quando a distribuição
das probabilidades é distinta, indivíduos com alta aptidão têm probabilidades bem mais
acentuadas que indivíduos com baixa aptidão, caracterizando uma pressão seletiva alta. Neste
trabalho de pesquisa, o controle da pressão seletiva foi realizado observando-se a variação das
Essa abordagem, entretanto, limita sua aplicação aos métodos de seleção probabilísticos –
Roleta (HOLLAND, 1992) e Ranking (BAKER, 1985) – excluindo, dessa forma, os métodos
não probabilísticos, como o método do Torneio (GOLDBERG, 1989).
3.3.1 A Pressão Seletiva no Método de Seleção por Roleta
É um método baseado na probabilidade de adaptação de cada indivíduo. Quanto maior a
adequação do indivíduo ao meio ambiente, maior será a sua fatia (área dentro da roleta), ou
seja, maior será sua probabilidade de ser escolhido. Com o controle da pressão seletiva sendo
feito por meio de alterações de probabilidades dos indivíduos, o efeito sobre esse método de
seleção será grande. Em outras palavras, em uma população na qual, originalmente, existe
uma diferença ínfima entre as probabilidades dos indivíduos, o que caracteriza uma pressão
seletiva baixa, ao alterarem-se essas probabilidades, gerando uma distinção na distribuição e
deixando indivíduos mais aptos com probabilidades bem superiores às dos menos aptos, a
pressão seletiva passa a ser alta.
Uma característica comum nesse método de seleção, segundo Joines (1999), é o surgimento,
no início do processo evolutivo, de um indivíduo com aptidão muito elevada, denominado
super-indivíduo. A conseqüência disso é o aumento indesejado da pressão seletiva, que baixa
a diversidade populacional e aumenta a velocidade de convergência para um máximo local,
dificultando o algoritmo a encontrar o máximo global para a solução do problema.
3.3.2 A Pressão Seletiva no Método de Seleção pelo Torneio
O método de seleção por torneio não é classificado como probabilístico porque, no momento
da seleção dos indivíduos, utiliza-se uma roleta equiprovável, ou seja, todos os indivíduos da
probabilidades dos indivíduos, como método para controlar a pressão seletiva não se faz
possível neste caso. Dessa forma, pode-se implementar algum método de controle da pressão
seletiva desde que não seja baseado nas probabilidades dos indivíduos.
Como o método do torneio é baseado na comparação direta entre q indivíduos escolhidos de
maneira equiprovável, existem autores como Pappa (2002) que defendem que quanto maior o
valor de q, maior será a pressão seletiva imposta à população, pois mais rapidamente as
características genéticas dos melhores indivíduos dominarão a população.
3.3.3 A Pressão Seletiva no Método de Seleção pelo Ranking
O método baseado na substituição dos valores originais de aptidão pelos valores de
ordenação, conforme a aptidão, também é um método probabilístico porque utiliza o método
da roleta para escolher os indivíduos após a ordenação. Nesse caso, com a ordenação dos
indivíduos baseada nos valores de suas respectivas posições, as distribuições de
probabilidades, entre os indivíduos, será sempre a mesma, impondo sempre a mesma pressão
seletiva. A alteração na escala de ordenação dos indivíduos fará com que a distribuição das
probabilidades se altere, ocorrendo o controle da pressão seletiva.
Uma desvantagem que o método do ranking apresenta é a necessidade de executar a cada
geração uma ordenação de toda a população. Isso pode ser oneroso quanto ao esforço
computacional, aumentando o tempo que o processo evolutivo leva para convergir a um







![Referências técnicas para atuação de psicólogas(os) em Programas de Atenção à Mulher em situação de Violência [2013] - CREPOP CREPOP](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)