Manuel Henrique Marques Pinheiro
Desenvolvimento de modelos numéricos e
análise experimental de subestruturas
soldadas de transformadores de potência,
sujeitas a forças de curto-circuito em regime
transitório
Manuel Henrique Marques Pinheiro
Desen
vol
vimento de modelos numér
icos e análise e xper iment al de subes tr utur as soldadas de tr ansfor mador es de po tência, sujeit as a for ças de cur to-cir cuito em r egime tr ansitór io
Universidade do Minho
Escola de Engenharia
Dissertação de Mestrado
Ciclo de Estudos Integrados Conducentes ao
Grau de Mestre em Engenharia Mecânica
Trabalho efectuado sob a orientação do
Professor Doutor António Marques de Pinho
e coorientação do
Engenheiro Hélder Mendes
Manuel Henrique Marques Pinheiro
Desenvolvimento de modelos numéricos e
análise experimental de subestruturas
soldadas de transformadores de potência,
sujeitas a forças de curto-circuito em regime
transitório
Universidade do Minho
Dissertação de Mestrado
AGRADECIMENTOS
Inicio, os meus agradecimentos ao meu orientador, Professor Doutor António Marques de Pinho, por todas as oportunidades profissionais que me proporcionou ao longo do meu percurso académico, bem como todo o apoio e conhecimento que me transmitiu ao longo deste projeto. Ao meu coorientador, Engenheiro Hélder Mendes, da empresa Efacec, pela oportunidade deste projeto, pelos conhecimentos adquiridos ao longo do todo o meu estágio e pela disponibilidade constante apresentada ao longo do tempo.
A todos os docentes do Mestrado Integrado em Engenharia Mecânica, pela disponibilidade e conhecimento transmitido,
Aos técnicos de laboratório, pelo apoio e esclarecimentos prestados.
Ao meu avô que recordo com saudade, foi quem sempre me aconselhou e ajudou quando precisei. Faz parte das minhas memórias e sentindo-me grato por ter conhecido uma pessoa magnífica.
Aos meus pais e avó, agradeço todo o apoio e, por vezes, a paciência disponível, especialmente quando as dificuldades apareceram. Um obrigado especial e sentido por todo esforço que fizeram, tornando possível este trabalho.
Aos meus amigos e à minha namorada em particular, um obrigado por todo o apoio ao longo deste percurso.
Dissertação de Mestrado
RESUMO
O trabalho exposto ao longo desta Dissertação descreve um projeto em desenvolvimento pela empresa Efacec, referente à evolução de componentes estruturais da parte ativa de um transformador de potência Core.
O evento do curto-circuito é o acontecimento mais catastrófico na vida útil de um transformador que, quando tal é viável, implica correções dos danos causados, com manutenções bastantes dispendiosas. Assim, é necessário que os projetistas dos componentes estruturais do transformador tenham em conta os esforços provocados pelo curto-circuito de forma a evitar tais danos ou, pelo menos, a atenuá-los.
A estrutura de acoplamento de um transformador Core tem como função proteger os constituintes da parte ativa do equipamento, evitando que os esforços mecânicos sejam aplicados sobre estes.
O principal objetivo deste trabalho consistiu no estudo do comportamento dinâmico da estrutura de acoplamento, quando esta se encontra sujeita aos esforços gerados no evento de curto-circuito.
Assim, com base na nova estrutura em desenvolvimento para o transformador Core, foi realizada uma análise das travessas. Para este componente, foi elaborado um algoritmo de cálculo capaz de apresentar o seu dimensionamento em função dos esforços a que se encontra sujeito. Esta análise permitiu também obter a flecha ao longo da travessa, sendo deduzida equação diferencial da linha elástica para as cargas consideradas. Neste componente, foi também analisado o seu comportamento dinâmico, tendo em conta os esforços resultantes do evento de curto-circuito.
Por último, foi estudada a placa de núcleo, que faz parte da estrutura de acoplamento do transformador, tendo sido proposto um novo design para a ligação soldada existente. Neste estudo, as simulações numéricas foram validadas através de testes experimentais.
Palavra-chave: Transformador tipo Core; curto-circuito; estrutura de acoplamento; tensões e
Dissertação de Mestrado
ABSTRACT
The work exposed along this Dissertation describes a project under development by the company Efacec, concerning to the evolution of structural components of the active part of a power transformer Core.
The ocurrence of short circuit is the most catastrophic event in the life cycle of a transformer. This event implies fixime the damage caused, when that is possible, which involves costly maintenance. Thus, it is necessary that the designers of the structural components of the transformer take into account the loads produced by short circuit in order to avoid such damages or, at least, mitigate them.
The coupling structure of a Core transformer must protect the constituents of the active part of the equipment by preventing that mechanical loads are applied to them.
The main objective of this work consisted in the study of the dynamic behavior of coupling structure, when it is subjected to the efforts generated during the event of short circuit.
Thus, on the basis of the new structure in development for the transformer Core, it was conducted an analysis of the clamping. For this component, it was elaborated a calculation algorithm able to present its sizing according to the efforts to which is subjected. This analysis also enabled the evaluation of the deflection along the clamping, the differential equations of the elastic line were deducted for the applied loads. The dynamic behavior of this component was also analyzed, taking into account the efforts resulting from the event of short circuit. Finally, it was studied the tie bars, which is part of the coupling structure of the transformer, a new design for the existing welded connection was proposed. In this study, the numerical simulations have been validated through experimental tests.
Key-words: Core Transformer; short-circuit; coupling structure; stress and deformation;
Dissertação de Mestrado
Í
NDICEAgradecimentos ... iii
Resumo ... v
Abstract ... vii
Lista de Figuras ... xiii
Lista de Tabelas ... xvii
Glossário de símbolos ... xix
1. Introdução ... 1 1.1 Motivação ... 2 1.2 Objetivos da Dissertação ... 3 1.3 Organização da Tese ... 3 2. Estado da arte ... 5 2.1 Transformador de Potência ... 5
Transformador de Potência do Tipo Core e Shell ... 7
2.2 Transformadores Tipo Core... 7
Enrolamentos ... 8
Circuito Magnético ... 9
2.3 Estrutura de Acoplamento da Parte Ativa ... 10
Placa de Núcleo ... 11
Travessa ... 11
2.4 Função da Estrutura de Acoplamento ... 12
Aperto de Fases ... 12
Movimentação da Parte Ativa ... 13
Esforços de Curto-Circuito ... 14 2.5 Falhas de Curto-Circuito ... 15 3. Fundamentos teóricos ... 17 3.1 Curto-Circuito ... 17 Tipo de Curto-Circuito ... 17 Forças de Curto-Circuito ... 18
3.2 Cálculo das Forças Axiais ... 20
3.3 Análise Elementar das Tensões ... 21
Tensões Normais no Domínio Elástico ... 22
Tensão de Corte numa Secção Retangular ... 23
3.4 Equação Diferencial da Elástica ... 23
Cálculo da Flecha de uma Viga com Esforço Balanço ... 25
Cálculo da Flecha Casos Apresentados em Tabelas Técnicas ... 26
3.5 Teoria da Plasticidade ... 27
Curva Tensão-Extensão no Domínio Elástico Plástico ... 27
3.6 Dinâmica de Estruturas ... 28
Métodos iterativos ... 30
Método de integração ... 31
3.7 Ligações soldadas ... 32
Dimensionamento de cordões de soldadura ... 33
4. Estudo da travessa ... 35
4.1 Modelo Analítico da Travessa ... 35
Cálculo de Esforços na Travessa ... 36
Cálculo das Reações nos Apoios ... 37
Apresentação de Resultados ... 38
Apresentação do Diagrama de Esforços Transversos e Momentos Fletores ... 39
Cálculo de Tensões ao Longo do Comprimento da Travessa ... 39
4.2 Cálculo das Flechas ... 41
Cálculo das Equações das Flechas ... 42
Flechas ao Longo da Travessa ... 44
4.3 Modelo Numérico ... 44
4.4 Análise de Resultados ... 46
Comparação das Tensões ... 46
Comparação da Flecha ... 47
Dissertação de Mestrado
Análise Dinâmica ... 48
Análise de Resultados ... 50
5. Estudo da placa de núcleo ... 53
5.1 Preparação dos Ensaios ... 53
Dimensionamento da Secção Transversal da Placa de Núcleo ... 54
Dimensionamento do Taco da Placa de Núcleo ... 56
Dimensionamento da Ligação Soldada ... 56
Amarra para o apoio dos provetes ... 59
Ligação entre o Provete e a Amarra de Apoio ... 60
Máquina de Ensaios ... 61
Aquisição dos Dados de Ensaio ... 62
Esquema dos Ensaios Experimentais ... 62
5.2 Geometria dos Provetes ... 63
5.3 Resultados dos Ensaios Experimentais... 65
5.4 Modelos Numéricos ... 68
Contactos utilizados nos modelos numéricos ... 69
Rede de Elementos Utilizada nos Modelos Numéricos ... 70
Carga Aplicada no Modelo Numérico ... 71
Propriedades do Material ... 71
5.5 Análise de Resultados ... 72
Série Pa ... 72
Série Pn e Pnr ... 74
6. Conclusões e Sugestões para Trabalhos Futuros ... 77
6.1 Conclusões ... 77
6.2 Sugestões para Trabalhos Futuros ... 78
7. Referências ... 79
8. Anexo II...83
9. Anexo II...87
10. Anexo III...105
Dissertação de Mestrado
LISTA DE FIGURAS
Figura 1.1-Geração, transmissão e distribuição da energia elétrica [1] ... 1
Figura 2.1-Transformador de elevada potência ... 5
Figura 2.2-Fenómeno de indução magnética [11] ... 6
Figura 2.3-Funcionamento de um transformador [13] ... 6
Figura 2.4-Transformador tipo Core (a) e tipo Shell (b) [14] ... 7
Figura 2.5-Parte ativa de um transformador tipo core ... 8
Figura 2.6-Cabo transposto (condutor utilizado na bobinagem de transformadores) [14] ... 8
Figura 2.7-Enrolamento helicoidal com espaçadores radiais de “press board” [14] ... 9
Figura 2.8-Formato de circuito magnético de transformador Core com vista do “entreferros” [12] ... 10
Figura 2.9-Comparação das estruturas de acoplamento ... 10
Figura 2.10-Diferenças entre placas núcleo: a) sistema antigo; b) sistema em desenvolvimento ... 11
Figura 2.11-Comparação de travessas: a) sistema antigo; b) sistema em desenvolvimento ... 12
Figura 2.12- Sistema de aperto (adaptado de [17]) ... 13
Figura 2.13-Evolução do sistema de elevação: a) sistema antigo; b) sistema em desenvolvimento ... 14
Figura 2.14-Curva “banheira”, falhas em transformadores em função do tempo de vida (adaptado de [19]) ... 15
Figura 2.15-Tipo de falha, custo de reparação em função de frequência (adaptado de [20]) . 16 Figura 3.1-Tipos de curto-circuito (adaptado de [21]) ... 18
Figura 3.2-Determinação da orientação da força de curto-circuito (adaptado de [21]) ... 19
Figura 3.3-Campo magnético nos transformadores tipo core [21] ... 19
Figura 3.4-Corrente e força de curto-circuito em função do tempo [21] ... 20
Figura 3.5- Fluxo magnético e força axial ao longo do enrolamento [22] ... 21
Figura 3.6-Diagrama de tensões de corte numa secção retangular (adaptado [25]) ... 23
Figura 3.7-Modo de deformação viga sujeita á flexão [25] ... 24
Figura 3.8-Condições de fronteira de uma viga encastrada e de uma viga simplesmente apoiada (adaptado [27]) ... 24
Figura 3.9-Viga com dois apoios com aplicação da carga de balanço [27] ... 25
Figura 3.11-Método de sobreposição (adaptado [25]) ... 27
Figura 3.12-Comparação entre curva tensão nominal-extensão nominal e a curva tensão verdadeira-extensão verdadeira [25] ... 28
Figura 3.13-Modelo dinâmico e diagrama de corpo livre [31] ... 29
Figura 3.14-Método iterativo no Ansys ... 30
Figura 3.15- Método iterativo Newton-Raphson [33] ... 31
Figura 3.16-Aceleração constante segundo o método Newmark (adaptado [32]) ... 32
Figura 3.17-Esforços nos diferentes cordões [34] ... 34
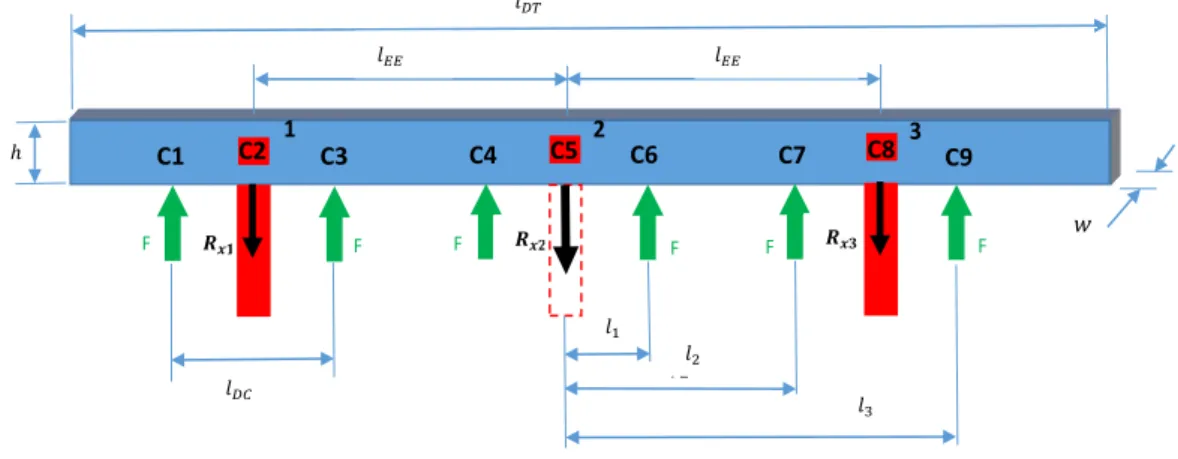
Figura 4.1-Esforços aplicados na travessa da estrutura de acoplamento do transformador .... 36
Figura 4.2- Distribuição das tensões de flexão e de corte no Ponto C2 ... 40
Figura 4.3-Decomposição do sistema em casos mais simplistas ... 41
Figura 4.4-Sistema com as cotas para cálculo das flechas na travessa ... 42
Figura 4.5-Modelo utilizado na simulação numérica ... 45
Figura 4.6- Malha utilizada no modelo numérico ... 45
Figura 4.7-Tensões críticas ao longo da travessa no modelo numérico ... 46
Figura 4.8- Constantes de amortecimento de Rayleigh ... 50
Figura 4.9- Tensões críticas ao longo da travessa no modelo numérico ... 51
Figura 5.1- Provete de ensaio ... 54
Figura 5.2- Trabalho da placa de núcleo ... 54
Figura 5.3- Momento fletor ao longo do ensaio ... 55
Figura 5.4- Série Pa (Pormenor do cordão de soldadura) ... 57
Figura 5.5- Série Pn (Pormenor dos cordões de soldadura) ... 59
Figura 5.6- Componente de apoio para os ensaios ... 60
Figura 5.7- Deslizamento entre o provete e o componente de apoio ... 60
Figura 5.8- Chapa de ligação entre provete e componente de apoio ... 61
Figura 5.9- Equipamento de ensaios DARTEC modelo M1000 L2-1 ... 61
Figura 5.10- Software BridgeLab ... 62
Figura 5.11- Esquema dos ensaios experimentais ... 62
Figura 5.12- Medição dos provetes ... 63
Figura 5.13- Vista superior e inferior dos provetes ... 65
Figura 5.14- Rutura dos provetes ... 65
Figura 5.15- Modelação da série Pa ... 68
Figura 5.16- Modelação da série Pn ... 69
Dissertação de Mestrado
Figura 5.18- Malha utilizada nas simulações da série Pa ... 70 Figura 5.19- Resultados das tensões do modelo numérico Série Pa ... 73 Figura 5.20- Resultados de tensões Série Pn ... 74
Dissertação de Mestrado
LISTA DE TABELAS
Tabela 3.1-Tabelas técnicas de flechas para vigas (adaptado [27] [28]) ... 26
Tabela 3.2-Tipos de juntas soldadas (adaptado [34]) ... 33
Tabela 3.3-Valores de rutura para cordões de soldadura [34] ... 34
Tabela 4.1-Valores das cotas nominais e esforços no protótipo em desenvolvimento ... 38
Tabela 4.2-Equações utilizadas no cálculo da flecha ao longo da travessa no Caso 1 ... 43
Tabela 4.3-Equações utilizadas no cálculo da flecha ao longo da travessa no Caso 2 ... 43
Tabela 4.4-Equações utilizadas no cálculo da flecha ao longo da travessa no Caso 3 ... 43
Tabela 4.5-Equações utilizadas no cálculo da flecha ao longo da travessa no Caso 4 ... 43
Tabela 4.6-Comparação de tensões do cálculo analítico com o modelo numérico ... 47
Tabela 5.1- Cordão de soldadura realizada na Série Pa e resistência ... 57
Tabela 5.2- Cordão de Soldadura realizado ao longo do taco na Série Pn e resistência ... 58
Tabela 5.3- Cordão de Soldadura realizado no rasgo da chapa da Série Pn e resistência ... 58
Dissertação de Mestrado
GLOSSÁRIO DE SÍMBOLOS
Símbolos
Gregos Definição Unidade
α Coeficiente de Rayleigh da matriz massa -
β Coeficiente de Rayleigh da matriz de rigidez -
δ Flecha [mm]
δ1 Flecha provocada pela carga no Ponto C9 [mm]
δ2 Flecha provocada pela carga no Ponto C6 [mm]
δ3 Flecha provocada pela carga no Ponto C7 [mm]
Variação -
φ Ângulo entre o vetor campo magnético e o
vetor corrente elétrica [rad]
Tensão normal [MPa]
τ Rácio da resistência e reactância -
τmax Tensão máxima de corte [MPa]
Ф Fluxo magnético [Wb]
ω Frequência angular [rad.s 1]
γ Parâmetro de integração -
ψ Parâmetro de integração -
Símbolos
Romanos Definição Unidade
a Distância do apoio à força [mm]
at Cordão lateral utilizado na série Pa [mm]
at' Cordão lateral ao longo do taco da série Pn [mm]
at'’ Cordão lateral ao longo do rasgo da série Pn [mm]
b Largura da secção transversal [mm]
bt Cordão frontal utilizado na série Pa [mm]
bt' Cordão frontal ao longo do taco da série Pn [mm]
B Campo magnético [T]
C Matriz de amortecimento [N. s /mm]
C1 Primeira constante de integração -
C2 Segunda constante de integração -
d0 Espaçamento entre enrolamentos [mm]
D Diâmetro do anel [mm]
Dm Diâmetro médio dos enrolamentos [mm]
Dma Metade da diferença dos diâmetros do anel [mm]
e Espessura da garganta [mm]
E Módulo de Elasticidade [GPa]
F Força [N]
Fa Componente axial de curto-circuito [N]
h Altura da travessa [mm]
H Altura dos enrolamentos [mm]
i Corrente elétrica [A]
I Momento de inércia [mm4
]
l Comprimento [mm]
l1 Distância do centro da travessa ao ponto C6 [mm]
l2 Distância do centro da travessa ao ponto C7 [mm]
l3 Distância do centro da travessa ao ponto C9 [mm]
l4 Distância ao ponto C1 [mm]
l5 Distância ao ponto C2 [mm]
l6 Distância ao ponto C3 [mm]
l7 Distância ao ponto C4 [mm]
lDT Comprimento total da travessa [mm]
lEE Distância entre eixos da travessa [mm]
L Comprimento da viga [mm]
K Matriz da rigidez [GPa]
M Matriz da massa [N]
Mf Momento fletor [N.m]
n Número de pratos -
Dissertação de Mestrado
P Força [N]
R Vetor de forças aplicadas [N]
Rx1 Força da reação na placa de núcleo 1 [N]
Rx2 Força da reação na placa de núcleo 2 [N]
Rx3 Força da reação na placa de núcleo 3 [N]
s Espessura do anel [mm] t Tempo [s] Tz Esforço transverso [N] U Vetor de deslocamento [mm] 𝑈̇ Vetor de velocidade [mm.s 1 ] 𝑈̈ Vetor de aceleração [mm.s 2]
v Espessura da chapa mais fina [mm]
y Distância ao eixo neutro [mm]
W Módulo elástico de flexão [mm 4]
w Espessura da travessa [mm]
Capítulo 1 | Introdução
1. INTRODUÇÃO
A energia elétrica é um bem essencial da sociedade atual de tal forma que a sua privação, mesmo que temporária, poderá resultar em enormes perdas económicas.
O percurso de energia elétrica é um processo muito complexo, desde a sua produção até ao consumo final. A produção da energia é, geralmente, realizada em zonas distantes da sua área de consumo, originando a necessidade de utilizar linhas de transmissão a elevada tensão. Sendo a potência dada pela relação entre a tensão e a corrente elétrica, a necessidade de aumentar a quantidade de energia elétrica transportada, potência elétrica, levará a um aumento de corrente e/ou de tensão. No entanto, o aumento de corrente, por sua vez, necessita de um aumento da secção dos condutores para que não exista o sobreaquecimento dos mesmos e perda de eficiência no transporte. Normalmente, faz-se o transporte de energia recorrendo a tensões elétricas muito elevadas.
À medida que a energia se aproxima do cliente final, existe a necessidade de baixar o nível de tensão, sendo esta distribuição feita em média tensão.
Por último, e quando esta se encontra na zona de consumo, existe a descida de nível de tensão, passando para baixa tensão. Este percurso encontra-se sintetizado na Figura 1.1, a ilustração apresenta a geração, transmissão e distribuição da energia como referido anteriormente.
Figura 1.1-Geração, transmissão e distribuição da energia elétrica [1]
O transformador é, neste contexto, um dos principais componentes do sistema de transmissão e distribuição, permitindo assim variar o nível de tensão consoante a necessidade da zona em questão. Deste modo, o transformador torna-se um equipamento essencial deste sistema. O seu princípio de funcionamento segue a Lei de indução deduzida por Faraday em 1831 [2] e posteriormente desenvolvida por Maxwell [3].
Azul : Transmissão
Verde: Distribuição
Preto: Produção
Estação de produção Subida de
tensão
Linhas de transmissão 765, 500, 345, 230 e 138 kV
Diminuição de tensão
O transformador de alta potência envolve um projeto estrutural bastante complexo, nomeadamente, deverá garantir a inibição de fugas de óleo e resistir aos esforços de curto-circuito bem como os solicitados no seu transporte.
Sendo que o principal requisito e mais problemático, para o fabricante, será a capacidade de resistir aos esforços originados no evento curto-circuito.
Apesar da necessidade de melhoria contínua, nomeadamente no fabrico deste equipamento, o recurso a novos métodos de dimensionamento requer testes experimentais para validar a sua viabilidade [4], resultando assim num aumento de custos para o fabricante deste tipo de equipamento.
Sendo o transformador um equipamento de dimensões consideráveis e uma estrutura com um custo elevado, qualquer anomalia que resulte na reparação ou substituição de componentes irá resultar em custos acrescidos, por outro lado, este tipo de trabalho acarreta operações muito morosas, colocando em risco o fornecimento da energia.
Ao longo dos anos, o desenvolvimento deste tipo de equipamento tem sido constante, uma vez que se tem registado um aumento de nível de potência nos transformadores. Este aumento reflete-se também no aumento de esforços mecânicos no evento de curto-circuito, daí existir a necessidade de saber quantificá-los.
Madin, Watts e Minhas, [4], [5], [6] estudaram modelos matemáticos para quantificar as forças de curto-circuito, atuantes nos enrolamentos de um transformador tipo Core ao longo do tempo. Também Patel [7], realizou estudos do comportamento dinâmico dos enrolamentos e da estrutura de aperto individualmente, ainda no mesmo trabalho é apresentado um estudo do mesmo com a combinação dos diferentes componentes.
A empresa Efacec utiliza no transformador de potência tipo Core uma estrutura de acoplamento, sendo nesta estrutura que incide o trabalho desta Dissertação, na qual é feito o projeto de um novo modelo que não comprometa o normal funcionamento do transformador. Esta nova estrutura deverá, assim, ser projetada com o intuito de resistir aos esforços eletromagnéticos gerados durante o evento de curto-circuito, mas também a outras solicitações como no normal funcionamento do transformador, e no seu transporte.
1.1 Motivação
A Efacec é o maior grupo eletromecânico nacional, que concorre com os maiores fabricantes de transformadores mundiais, e apresenta um enorme carácter de desenvolvimento tecnológico
Capítulo 1 | Introdução que, devido ao aumento de concorrência nos últimos anos e as grandes exigências dos clientes, apresenta a necessidade de melhoria contínua.
O projeto estrutural de um transformador é, sem dúvida, um projeto bastante confiável e comercialmente atualizado, no entanto existe a necessidade de entrar em novos mercados. A entrada nestes mercados só é possível com a diminuição do seu custo total. Com este pressuposto existe a necessidade de melhorar/evoluir os métodos de cálculo utilizados nos dias de hoje no dimensionamento estrutural do transformador.
Nesse sentido, esta Dissertação foi desenvolvida tendo como objetivo estudar novas soluções para alguns dos componentes estruturais dos transformadores tipo Core. Para o efeito foram estudados e realizados modelos matemáticos tendo em vista o dimensionamento de tais componentes, alguns validados experimentalmente.
1.2 Objetivos da Dissertação
Este trabalho teve como principal objetivo o estudo de um modelo analítico capaz de realizar o dimensionamento de componentes estruturais da parte ativa de um transformador Core. Um dos componentes da estrutura do transformador estudado foi a placa de núcleo, tendo -se efetuado dimensionamento das ligações à estrutura principal. Neste contexto, realizaram-se dimensionamentos dos cordões de soldadura assim como respetivos ensaios experimentais de validação. Ainda em relação ao processo de soldadura, fez-se a modelação do componente, através de simulações não-lineares, recorrendo ao Método dos elementos finitos, validando os seus resultados experimentalmente.
1.3 Organização da Tese
No primeiro Capítulo, apresentam-se algumas considerações que demonstram a importância do transformador na sociedade. Também é referida a importância do trabalho desenvolvido, bem como a respetiva motivação.
No segundo Capítulo, é apresentado o estado da arte, onde é exposto o tipo de transformadores existentes. De seguida, e porque o trabalho incidiu na parte ativa do transformador, são evidenciados os componentes que compõe o transformador Core, bem como as suas características e funções. Posteriormente, e como o trabalho foi realizado no âmbito do desenvolvimento de um protótipo efetuado pela Efacec, são apresentadas as principais
diferenças entre os componentes anteriores e os projetados no âmbito desta Dissertação. Por fim, é apresentada qual a funcionalidade dos componentes estruturais no transformador. No terceiro Capítulo, faz-se uma breve introdução aos conhecimentos teóricos inerentes ao evento de curto-circuito, bem como os esforços gerados por este e as equações matemáticas utilizadas para os quantificar. Além do referido, são também apresentados alguns conceitos empregues para o dimensionamento estrutural, bem como os métodos iterativos e de integração utilizados no software Ansys para a realização de simulações. Por último, são referidos alguns métodos de dimensionamento relativos às construções soldadas.
No quarto Capítulo, é apresentado o estudo da travessa, um dos componentes estruturais da parte ativa do transformador, onde se apresenta o dimensionamento analítico do mesmo, assim como é feita a comparação com os valores obtidos através de modelos numéricos. Por último, é realizada uma simulação dinâmica do modelo numérico, cujos valores são comparados com os estáticos.
No quinto Capítulo, é apresentada a planificação e os resultados dos ensaios experimentais. Os testes realizados tiveram como principal intuito validar o modelo numérico, recorrendo ao
software Ansys em regime não-linear, que incide sobre a ligação soldada.
No final desta Dissertação são apresentadas as principais conclusões dos trabalhos realizados, bem como sugestões para trabalhos futuros, de forma a dar continuidade ao trabalho já desenvolvido.
Capítulo 2| Estado da Arte
2. ESTADO DA ARTE
A ocorrência de falhas nos transformadores de potência é uma das principais preocupações dos seus fabricantes. Apesar dos transformadores de potência apresentarem uma boa resistência no desempenho da sua função, existe um desgaste associado durante o seu tempo útil de vida, isto resulta na diminuição da sua resistência aos esforços a que este se encontram sujeitos, principalmente na ocorrência do curto-circuito. Neste contexto, é essencial projetar os componentes resistentes às condições extremas, neste caso ao curto-circuito, com o intuito de tentar garantir o normal funcionamento do transformador durante as suas falhas.
Neste capítulo é apresentado o funcionamento de um transformador, fazendo a diferenciação entre os dois principais tipos de transformadores de potência, Core e Shell. Serão referenciados os principais elementos constituintes da parte ativa de um transformador tipo Core. Por último, serão indicadas quais as funções da estrutura de acoplamento.
2.1 Transformador de Potência
Um transformador de potência, representado na Figura 2.1, é um equipamento do circuito de distribuição de energia elétrica. Este pode ser dotado de dois ou mais enrolamentos, trabalhando por indução magnética. Transforma energia alternada, com uma determinada corrente e voltagem, noutro regime com valores distintos [9].
O processo de transformação, referido anteriormente, é possível através do fenómeno de indução eletromagnética [10], este produz uma força eletromotriz num circuito fechado através do fluxo magnético. Na Figura 2.2, é possível visualizar o fenómeno descrito.
Figura 2.2-Fenómeno de indução magnética [11]
Se num corpo condutor existir a variação do campo magnético (∆Φ) num determinado intervalo de tempo (∆t), este irá gerar uma corrente elétrica (I). No caso da existência de vários corpos (N), a corrente produzida será proporcional a essa mesma quantidade. A relação é dada através da Equação (2.1) [12]:
𝐼⃗ = −𝑁𝑑Φ
𝑑𝑡 ( 2.1 )
Em termos mais simplistas, um transformador é composto por dois enrolamentos (o primário e o secundário), estes envolvem o núcleo metálico, cujo esquema é apresentado na Figura 2.3. Quando a corrente é alternada, tendo em conta a Equação (2.1), o campo magnético produzido será proporcional à intensidade da corrente, e ao número de espiras do enrolamento.
Figura 2.3-Funcionamento de um transformador [13]
A variação de espiras nos dois enrolamentos, originará valores de correntes diferentes na entrada e na saída do transformador. Num transformador ideal (sem perdas), esta relação é
Capítulo 2| Estado da Arte 𝐼𝑝𝑟. 𝐼𝑠𝑒𝑐. = 𝑁𝑝𝑟. 𝑁𝑠𝑒𝑐. ( 2.2 )
Transformador de Potência do Tipo Core e Shell
Apesar do funcionamento ser o mesmo nos diversos transformadores existentes, neste trabalho serão estudados apenas, os transformadores de elevada potência. Na referência [15] são apresentados os diferentes tipos de transformadores fabricados.
Em relação, aos transformadores de elevada potência, estes dividem-se em dois grupos, transformadores tipo Core, nestes os enrolamentos encontram-se em torno do núcleo, Figura 2.4 (b), os transformadores tipo Shell, que apresentam uma forma de construção contrária ao anterior, uma vez que, é o núcleo que envolve os enrolamentos, sendo estes apresentados na Figura 2.4 (a).
Este trabalho teve como principal foco o estudo da estrutura metálica de acoplamento, destinada aos transformadores Core. Nesse contexto, são apresentadas algumas vantagens deste tipo de equipamento e as caraterísticas dos seus componentes.
Figura 2.4-Transformador tipo Core (a) e tipo Shell (b) [14]
2.2 Transformadores Tipo Core
Devido à forma cilíndrica dos enrolamentos deste transformador, existe a possibilidade de uma construção mais automatizada, sendo possível obter tempos de construção mais reduzidos. Outra vantagem deste transformador é a sua manutenção, pois na ocorrência de algum problema a sua correção é muito mais económica, quando comparada com o tipo Shell.
Num transformador tipo Core, o eixo dos enrolamentos está orientado na vertical. Na Figura 2.5 é possível visualizar a parte ativa deste equipamento. Este sistema é responsável pelo funcionamento do equipamento, sendo constituída pelo circuito magnético e os enrolamentos. Para o trabalho eficiente do conjunto, existe a necessidade do fabrico de uma estrutura que garanta o acoplamento, e a segurança no seu funcionamento. De seguida, é explicado a funcionalidade de cada constituinte.
Figura 2.5-Parte ativa de um transformador tipo core
Enrolamentos
Os enrolamentos utilizados num transformador Core são do tipo helicoidal, estes podem ser bobinados num cilindro isolante ou ter vários espaçadores entre eles. Nos transformadores de elevada potência, são colocados vários condutores em paralelo, com o intuito de aumentar a sua capacidade. Como é possível verificar na Figura 2.6, estes apresentam uma secção retangular para garantir uma superfície de apoio, sendo assim mais capazes de transferir uniformemente os esforços mecânicos, gerados pelas forças eletromagnéticas.
Capítulo 2| Estado da Arte Para garantir o afastamento, e o isolamento entre as várias camadas de material condutor é colocado “press board”. Este componente contêm uma grande capacidade térmica, principalmente quando se encontra revestido pelo óleo de mineral.
Se no fenómeno de curto-circuito existir o rompimento do “press board”, poderá levar ao contacto de condutores, resultando na avaria ou destruição da máquina. Neste contexto, a vida útil do equipamento, está diretamente relacionada com o tempo de vida dos enrolamentos ou do “press board”.
Figura 2.7-Enrolamento helicoidal com espaçadores radiais de “press board” [14]
Circuito Magnético
Este componente é constituído por chapas de material magnético, compostas por aço com silício, tendo este a função de permitir que a densidade de fluxo magnético alcance valores elevados, reduzindo as perdas do sistema.
As chapas utilizadas são laminadas a frio com espessura de 0,2 a 0,3 mm, sendo estas constituídas por aproximadamente 0,005% de carbono e 3% a 4% de silício. O silício permite diminuir as perdas e manter as suas características ao longo do tempo.
O circuito contém um isolante à base de silicatos. Este material tem a característica de poder realizar um trabalho eficiente quando sujeito a elevadas temperaturas (realizando a conversão sem grandes perdas associadas), essencial para a limitação de correntes de Focault [16]. Estas correntes de Focault são produzidas pela variação do fluxo magnético, originando um aumento de temperatura no equipamento que, por sua vez, resulta num aumento de perdas no sistema.
O empilhamento de chapas deverá formar uma secção circular. Esta geometria é, principalmente, utilizada nos transformadores Core. Devido ao processo de fabrico, a junção das chapas formam um caminho para fluxo magnético. Nesta junção, existem os espaçamentos
entre chapas, denominados por “entreferros”, sendo este um problema para o sistema, uma vez que estes são perpendiculares ao circuito magnético, causando problemas no percurso do fluxo magnético.
Na Figura 2.8 é possível visualizar o circuito magnético utilizado num transformador tipo Core, bem como uma vista de pormenor, relativamente à da junção entre as diversas chapas.
Figura 2.8-Formato de circuito magnético de transformador Core com vista do “entreferros” [12]
2.3 Estrutura de Acoplamento da Parte Ativa
A estrutura de acoplamento da parte ativa de um transformador trifásico é uma estrutura metálica constituída por quatro travessas, duas superiores e duas inferiores e seis placas de núcleo, que têm a função de fazer a ligação entre as travessas superiores e inferiores.
Como referido anteriormente, existe uma nova estrutura em desenvolvimento por parte da Efacec, que foi, inicialmente, calculada através de simulações numéricas e, posteriormente, realizada, validada através de testes realizados num protótipo fabricado à escala 1:1 para o efeito. Na Figura 2.9 é possível visualizar as duas estruturas, apresentando-se à esquerda a estrutura que vem sendo fabricada e à direita a nova estrutura.
Corte A-A
Capítulo 2| Estado da Arte Como é possível verificar, as travessas da nova estrutura são munidas de cintas de aperto, tendo estas a função de estabelecer o aperto das chapas magnéticas entre as travessas. Ao invés a estrutura fabricada atualmente utiliza perfis para desempenhar as funções referenciadas.
Placa de Núcleo
A placa de núcleo é um componente essencial da estrutura de acoplamento, que foi objeto de estudo desta Dissertação de Mestrado e que incidiu sobre o seu dimensionamento. Em parceria com o Laboratório de Ensaio Materiais do Departamento de Engenharia Mecânica, foram realizados ensaios experimentais em dois modelos distintos da placa de núcleo.
Relativamente à nova estrutura, a placa de núcleo apresenta um distinta montagem da anterior. Na Figura 2.10, é possível visualizar as diferenças entre as duas placas, onde na Figura 2.10 a) se apresenta a placa de núcleo dos transformadores ainda em fabrico, e na Figura 2.10 b) a nova solução.
Como é possível constatar, a placa de núcleo representada na Figura 2.10 a) apresenta-se como um componente muito menos elaborado e com simetria, comparativamente como se observa na Figura 2.10 b). Consequentemente trata-se de um componente mais económico.
Figura 2.10-Diferenças entre placas núcleo: a) sistema antigo; b) sistema em desenvolvimento
Travessa
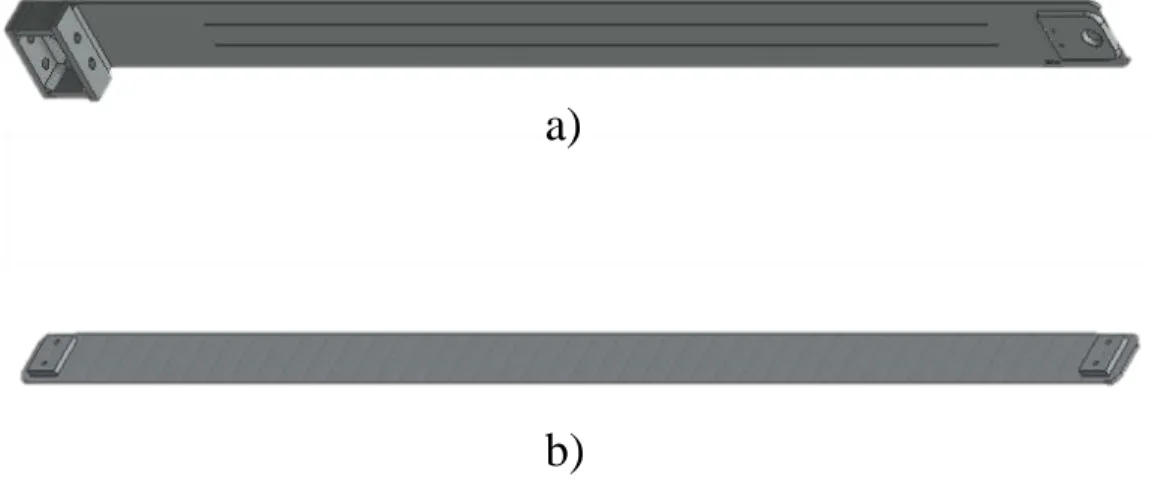
A travessa da estrutura de acoplamento do novo protótipo foi também um componente estudado no âmbito desta Dissertação, sendo o seu dimensionamento apresentado no Capítulo 4. A Figura 2.11 apresenta as duas travessas, sendo representado na Figura 2.11 a) a que tem vindo a ser utilizado, na Figura 2.11 b) a que está em desenvolvimento.
Em relação às diferenças entre as duas travessas, Figura 2.11, é possível visualizar que estas são relativas à geometria utilizada, sendo a atual um perfil em C. Na travessa do protótipo em
a)
desenvolvimento é possível verificar na Figura 2.11 b), que a sua secção é maioritariamente retangular, obtida a partir de chapas cortadas por oxicorte.
Figura 2.11-Comparação de travessas: a) sistema antigo; b) sistema em desenvolvimento
2.4 Função da Estrutura de Acoplamento
Esta estrutura com a função de segurança e resistência do sistema está sujeita a três tipos de solicitações, a saber:
Aperto de fases
Movimentação da parte ativa
Curto-circuito
Estas solicitações poderão ocorrer simultaneamente ou isoladamente.
Aperto de Fases
Numa primeira instância, tem-se o aperto das fases na parte ativa (enrolamentos). Este aperto, ou compressão, tem como objetivo impedir o movimento dos enrolamentos, uma vez que, no evento de curto-circuito serão desenvolvidos esforços muito elevados que poderão originar deslocamentos, podendo colocar em risco o normal funcionamento do equipamento.
A estrutura de acoplamento é constituída por um anel de aperto, sendo a pressão aplicada sobre este componente. Nos transformadores de potência, o aperto é aplicado, inicialmente, com recurso a macacos hidráulicos, sendo de seguida bloqueados os enrolamentos com cunhas de madeira e materiais de fibra de vidro, na Figura 2.12 é possível visualizar o sistema de aperto.
a)
Capítulo 2| Estado da Arte
Figura 2.12- Sistema de aperto (adaptado de [17])
Segundo a referência [17], a tensão máxima sobre o anel aperto pode ser calculada realizando uma aproximação a uma viga simplesmente apoiada, sendo a tensão máxima aplicada no anel apresentada na Equação (2.3).
𝜎𝑚𝑎𝑥 = 3𝜋𝐹𝑎𝐷
4𝐷𝑎𝑠2𝑛2
( 2.3 )
Onde:
Fa− Componente axial dos esforços de curto-circuito [N]
D − Diâmetro do anel [mm]
Da− Metade da diferença do diâmetro exterior e interior do anel [mm]
s − Espessura do anel [mm] n − Número de pratos de aperto
Movimentação da Parte Ativa
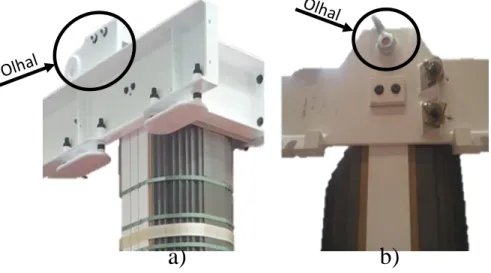
Ainda no fabrico do transformador, existe a necessidade de movimentação (transporte) da parte ativa. Esta dá-se com as fases sob a “pré-tensão” anteriormente referida. Este transporte é realizado com auxílio de olhais acoplados na travessa, Figura 2.13.
E n rola m e n to e x te ri o r E n rola m e n to int e rno E n rola m e n to e x te ri o r E n rola m e n to int e rno
Força de
aperto
Travessa Pratos AnelForça de
aperto
Na Figura 2.13, podem-se visualizar os dois sistemas de levantamento: na Figura 2.13 a), apresenta o sistema em fabrico com o auxílio de um olhal; na Figura 2.13 b) é possível verificar o olhal do sistema em desenvolvimento (donuts).
Também os olhais foram objeto de alterações consideráveis. Na estrutura em fabrico é possível verificar a existência de um olhal, sendo este um componente adaptado à travessa. Em relação à estrutura em desenvolvimento a travessa contém dois “donuts” responsáveis pelo levantamento.
Na movimentação da parte ativa o principal responsável para que estrutura não colapse é a placa de núcleo, uma vez que esta é a responsável pela união entre as duas travessas.
Esforços de Curto-Circuito
No funcionamento do transformador, os esforços gerados pelo curto-circuito podem provocar deformações nos diferentes componentes da parte ativa, levando ao fim de vida do equipamento ou a reparações muito dispendiosas.
Os enrolamentos conjuntamente com a estrutura metálica de acoplamento formam um sistema mecânico, com uma massa e uma elasticidade próprias.
Na direção radial, como o cobre apresenta uma grande elasticidade, sendo a sua massa pequena, resultando numa frequência natural maior do que as do funcionamento do equipamento. Sendo assim, a energia armazenada pelo deslocamento dos enrolamentos quando sujeitos a estas forças, dá-se no domínio elástico. Neste contexto, é possível concluir que os deslocamentos devido aos esforços radiais podem ser desconsiderados [18].
Por outro lado, em relação à componente axial, a quantidade de isolamento é bastante considerável, apresentando frequências naturais que se situam muito próximas das do
a)
b)
Capítulo 2| Estado da Arte funcionamento normal do equipamento, tal condição poderá resultar em elevados deslocamentos, originando danos catastróficos no transformador.
2.5 Falhas de Curto-Circuito
De acordo com Wang [19], as falhas de um transformador podem ser classificadas como de origens elétricas, mecânicas e térmicas.
A Figura 2.14 apresenta um modelo mais conhecido como curva da “banheira”, segundo Wang, este descreve um padrão das falhas de qualquer tipo de máquina em função do seu tempo de vida. Neste padrão poderá ser inserido qualquer tipo de falha anteriormente referido.
Figura 2.14-Curva “banheira”, falhas em transformadores em função do tempo de vida (adaptado de [19])
De acordo com a curva, é possível verificar que as fases críticas no funcionamento de qualquer equipamento são nos períodos de início e final de vida. No período inicial, as falhas verificadas no transformador devem-se essencialmente a defeitos do projeto ou fabrico. Na segunda fase, apresenta um número de falhas praticamente constante ao longo do tempo, sendo que estas apresentam uma quantidade de valores relativamente baixos. A última fase deve-se essencialmente ao envelhecimento do transformador.
De acordo com a Bartley [20] estas falhas são provenientes do isolamento dos enrolamentos. No funcionamento da máquina, a resistência deste componente, para suportar esforços de curto-circuito, vai diminuindo até não o ser mais capaz.
Além de falhas no isolamento, existem ainda outras anomalias a ter em conta, uma vez que, existem outros acontecimentos que apresentam alguma frequência, podendo estes resultar em prejuízos avultados, como se pode visualizar na Figura 2.15.
O envelhecimento do transformador depende fundamentalmente da sua resistência mecânica e integridade elétrica. Os esforços gerados no evento de curto-circuito estão relacionados com a
redução de capacidade de suportá-los, levando a um funcionamento deficiente do mesmo, pois na ocorrência deste evento, a parte ativa do transformador irá perder o alinhamento correto dos seus componentes. Neste contexto, um transformador é dimensionado para resistir a um número pré-definido de curtos-circuitos e quando esse for atingido os enrolamentos terão um deslocamento tal que, resultará na perda de capacidade de suportar os esforços.
Figura 2.15-Tipo de falha, custo de reparação em função de frequência (adaptado de [20])
Cus
to
de
fal
ha
s
Número de falhas e causa
DesconhecidoProjeto/ Material
Falha de isolamento
Capítulo 3| Fundamentos teóricos
3. FUNDAMENTOS TEÓRICOS
3.1 Curto-Circuito
Com a evolução tecnológica ao longo dos anos, existiu um aumento circunstancial no consumo de energia elétrica, refletindo-se num aumento de produção e distribuição da mesma. Como consequência, é provável que os acidentes relacionados com o evento de curto-circuito sejam cada vez mais graves, dado a necessidade do aumento de potência dos equipamentos em questão. Neste contexto, são utilizadas ferramentas de cálculo, disponíveis para simular condições de funcionamento mais severas, realizando o dimensionamento dos vários componentes do transformador.
Atualmente, existe uma maior preocupação em relação às forças eletrodinâmicas, que atuam instantaneamente nos enrolamentos do transformador, sendo proporcionais ao quadrado da corrente. Isto significa que se a amplitude da corrente aumentar de 10 a 20 vezes relativamente ao valor da corrente nominal, as forças de trabalho aumentam de 100 a 400 vezes. Estes esforços são prejudiciais para todos os componentes do transformador, em particular para os da parte ativa.
Apesar da existência de normas, como IEC (Internacional Electrotechnical Commission) 60076-5, que impõe que os transformadores sejam capazes de resistir ao curto-circuito, a verdade é que existem vários fatores que dificultam esta análise. Sendo o fenómeno fácil de entender, o transformador é dotado de vários componentes, com diversos materiais e obtidos com diferentes processos de fabrico, resultando assim num equipamento de enorme complexidade.
Neste contexto a realização de um projeto seguro e confiável, requer a utilização diversas metodologias tendo em vista o dimensionamento mecânico dos diversos componentes do transformador [18].
Tipo de Curto-Circuito
O curto-circuito é um dos principais problemas deste tipo de equipamento, que provoca alterações no sistema elétrico originando correntes transitórias de grande magnitude. Estas por sua vez, provocam forças eletrodinâmicas de grande intensidade que atuam sobre os componentes do transformador. Sendo este evento um dos principais problemas no
transformador poderá, em condições mais extremas, colocar o mesmo fora de serviço. Este tipo de acontecimento pode ter vários tipos, sendo apresentados na Figura 3.1:
Curto-circuito trifásico, Figura 3.1 a);
Curto-circuito bifásico, Figura 3.1 b);
Curto-circuito bifásico com ligação à terra, Figura 3.1 c);
Curto- circuito na ligação linha-terra, Figura 3.1 d);
Curto- circuito duplo à terra, Figura 3.1 e).
Figura 3.1-Tipos de curto-circuito (adaptado de [21])
Dados de investigação apresentam que o curto-circuito à linha-terra acontece com uma maior frequência [22]. Apesar disso, o curto-circuito trifásico apresenta esforços mecânicos mais severos para o sistema, por essa razão os transformadores são dimensionados para este tipo de acontecimento [18].
Forças de Curto-Circuito
Os esforços de curto-circuito resultam da interação do campo magnético com a corrente elétrica, de acordo com a teoria eletrodinâmica, a densidade de força de um enrolamento de um transformador é igual ao produto da densidade do fluxo de campo magnético e da densidade de corrente no enrolamento. Isto traduz-se na equação (3.1) [21], que se sustenta na expressão básica de Lorentz. A força é perpendicular ao plano formado pelos dois vetores, sendo a sua orientação determinada utilizando a regra da mão esquerda, apresentada na Figura 3.2.
a) Curto-circuito trifásico
b) Curto-circuito bifásico
c) Curto-circuito bifásico com ligação à terra
d) Curto-circuito na ligação linha-terra
e) Curto-circuito duplo à terra
Capítulo 3| Fundamentos teóricos
Figura 3.2-Determinação da orientação da força de curto-circuito (adaptado de [21])
Através da Equação 3.1 é possível calcular a magnitude da força eletromagnética num fio condutor:
𝐹 = 𝐵 × 𝐼 × 𝑙 × 𝑠𝑖𝑛 𝜑 ( 3.1 )
Onde:
𝐹 − Força eletromagnética [N] 𝐵 − Campo magnético [T] 𝐼 − Corrente elétrica [A] 𝑙 − Comprimento [m]
sin 𝜑 − Ângulo entre campo magnético e a corrente elétrica
Na Figura 3.3 é apresentado o campo magnético nos transformadores Core. Como é possível verificar, o fluxo magnético ocorre principalmente no eixo axial, ao longo da altura dos enrolamentos. Nos extremos existe uma inclinação resultando numa decomposição do fluxo magnético, originando uma componente axial (Ba) e outra radial (Br).
Figura 3.3-Campo magnético nos transformadores tipo core [21]
Corrente Cam p o m agn ético
A corrente de curto-circuito tem um comportamento harmónico que gera correntes superiores ao funcionamento normal do equipamento. Embora apresente um espetro decrescente, são os valores máximos que se consideram para efeito do dimensionamento da máquina.
Na Figura 3.4 é possível verificar os esforços gerados neste evento. O valor do esforço devido às correntes de curto-circuito é proporcional ao quadrado da mesma, a partir da Equação (3.2) é possível calcular o comportamento da força ao longo do tempo.
Figura 3.4-Corrente e força de curto-circuito em função do tempo [21]
𝐹(𝑡) = 𝐹𝑚𝑎𝑥(1 2+ 𝑒 −2𝑡 𝜏 − 2𝑒 −𝑡 𝜏 × cos(𝜔𝑡) +1 2cos(2 𝜔𝑡)) ( 3.2 ) Onde: 𝐹𝑚𝑎𝑥− Força máxima [N] 𝑡 − Tempo [s]
𝜏 − Rácio entre resistência e reactância 𝜔 − Frequência [rad/s]
O cálculo das forças mecânicas geradas pela corrente de curto-circuito é possível obter depois de se conhecer a densidade do fluxo magnético do equipamento.
Este estudo nos transformadores Core é normalmente estabelecido num formato 2D, uma vez é possível representar os enrolamentos e circuito magnético com o eixo de simetria.
Como referido no Capítulo 2, no dimensionamento de um transformador Core a componente axial é a que tem maior relevância no estudo. Nesse contexto, de seguida, será apresentada a metodologia de cálculo da componente axial.
3.2 Cálculo das Forças Axiais
O cálculo de forças axiais é deduzido a partir das referências [14] [17] [18], a Figura 3.5 apresenta o fluxo magnético e os esforços axiais nos dois enrolamentos do transformador Core.
Capítulo 3| Fundamentos teóricos Observa-se que a força máxima ocorre no centro de ambos os enrolamentos, enquanto nas extremidades será nula.
Figura 3.5- Fluxo magnético e força axial ao longo do enrolamento [22]
Para calcular a força de compressão no centro dos enrolamentos utiliza-se a Equação (3.3), conforme as referências acima referidas.
𝐹𝑎 =2𝜋(𝑁𝐼𝑚𝑎𝑥)𝐷𝑚 107𝐻2 × (𝑑0+ 𝑑1+ 𝑑2 3 ) ( 3.3 ) Onde: 𝑁 − Número de espiras
𝐼𝑚𝑎𝑥 − Pico de corrente elétrica [A]
𝐷𝑚− Diâmetro médio do enrolamento interno e externo [m]
𝐻 − Altura dos enrolamentos [m]
𝑑0− Espaçamento entre os enrolamentos [m]
𝑑1𝑒 𝑑2− Diâmetro dos enrolamentos [m]
De acordo com a referência [18], na ausência de estudo mais aprofundado é aconselhável considerar que 2/3 a 3/4 da força resultante é aplicada pelo enrolamento interno, a restante será realizada no enrolamento externo.
3.3 Análise Elementar das Tensões
Os métodos teóricos apresentados de seguida têm apenas em conta as equações de equilíbrio da Mecânica, sendo o cálculo das tensões, bem como das deformações, apenas aplicáveis em componentes de secção transversal constante.
Sendo o projeto da nova estrutura de acoplamento algo novo para a Efacec, não tendo ainda uma base do conhecimento cimentado sobre a mesma, exige numa primeira etapa, a necessidade de aproximação a modelos mais simplistas.
Tensões Normais no Domínio Elástico
Numa viga sujeita a um momento fletor, casos as tensões instaladas se encontrem abaixo da tensão de cedência do material, o componente trabalha no seu domínio elástico, não ocorrendo deformações permanentes.
Nesse sentido, aplicando a Lei de Hooke para um estado de tensões uniaxial, considerando o material isotrópico tem-se [23]:
𝜎𝑥= 𝐸𝜀𝑥 ( 3.4 )
Como um elemento de viga em questão, apresenta dois eixos de simetria, obtém-se tensões máximas e mínimas simétricas, segundo a referência [24] temos:
𝜎𝑚𝑎𝑥 = 𝑀𝑓𝑦
𝐼 ( 3.5 )
Onde:
𝜎𝑚𝑎𝑥− Tensão Normal Máxima [MPa]
𝑀𝑓− Momento fletor [N.mm]
𝑦 − Distância ao eixo neutro [mm]
𝐼 − Momento de Inércia [mm4]
Na equação (3.5) é possível constatar, I/y depende unicamente da geometria da secção transversal do componente. Este índice denomina-se de módulo elástico de flexão, ou módulo de resistência à flexão, sendo assim, a tensão máxima na viga é inversamente proporcional ao módulo elástico, uma vez que:
𝑀ó𝑑𝑢𝑙𝑜 𝑒𝑙á𝑠𝑡𝑖𝑐𝑜 𝑑𝑒 𝑓𝑙𝑒𝑥ã𝑜 = 𝑊 = 𝐼
𝑦 ( 3.6 )
𝜎𝑚𝑎𝑥 = 𝑀
𝑊
Capítulo 3| Fundamentos teóricos
Tensão de Corte numa Secção Retangular
Numa secção transversal com altura h e largura b, a variação da tensão de corte tem o comportamento de acordo com a Figura 3.6.
Figura 3.6-Diagrama de tensões de corte numa secção retangular (adaptado [25])
O diagrama apresenta uma parábola onde atinge o seu valor máximo em z=0. De acordo com Moura Branco [25] utiliza-se Equação (3.8) para calcular a tensão máxima de corte neste tipo de secção.
𝜏𝑚á𝑥 = 1,5𝑇𝑧
ℎ𝑏 ( 3.8 )
Onde:
𝜏𝑚á𝑥− Tensão máxima de corte [MPa]
𝑇𝑧−Esforço transverso [N]
ℎ − Altura [mm] 𝑏 − Largura [mm]
3.4 Equação Diferencial da Elástica
A Figura 3.7 apresenta uma viga solicitada à flexão. A viga apresenta um plano de simetria vertical, a curva AB representa a fibra neutra deformada. A determinação da equação da curva depende apenas do momento fletor [25]. A curva é denominada de linha elástica, portanto é válida apenas para deformações no domínio elástico, sendo que deformações plásticas não são contempladas por este método.
Figura 3.7-Modo de deformação viga sujeita á flexão [25]
Para calcular a flecha de uma viga num determinado ponto segundo Moura Branco e Timoshenko [25] [26], recorre-se à Equação (3.9). A primeira integração permite calcular o declive em cada ponto da viga.
𝑑2𝛿 𝑑𝑥2 = − 𝑀𝑓 𝐸𝐼 ( 3.9 ) Onde: 𝑀𝑓−Momento fletor [N.mm] 𝐼 − Momento de Inércia [mm4]
𝐸 −Módulo de Young [MPa] 𝛿 – Flecha [mm]
Relativamente, às constantes de integração apresentadas no processo de cálculo estas são determinadas pelas condições de fronteira, Figura 3.8.
Figura 3.8-Condições de fronteira de uma viga encastrada e de uma viga simplesmente apoiada (adaptado [27])
y x A B A B y x 𝛿 A = 0 ƟA = 0 𝛿 A = 0 𝛿 B = 0
Capítulo 3| Fundamentos teóricos
Cálculo da Flecha de uma Viga com Esforço Balanço
No decorrer deste trabalho, existiu a necessidade de cálculo da flecha para um viga com dois apoios tendo uma carga na extremidade da viga, este em balanço.
Beer e Johnston [27] apresentam a resolução d o problema. Apresentado na Figura 3.9, que simula o sistema em estudo, no âmbito deste trabalho.
Figura 3.9-Viga com dois apoios com aplicação da carga de balanço [27]
Como a equação diferencial elástica, Equação 3.9, depende do momento fletor ao longo da viga, é necessário o esboço de diagrama de corpo livre, ao longo da viga, que se pode encontrar na referência [27], e que se apresenta na Figura 3.10.
Figura 3.10-Diagram de corpo livre da viga com esforço em balanço
Depois calculadas as reações nos apoios A e B, é possível determinar o momento fletor ao longo comprimento L, sendo este representado pela Equação (3.10).
𝑀𝑓 = −𝑃𝑎
𝐿𝑥 ( 3.10 )
Utilizando a Equação (3.10) obtém-se a equação diferencial elástica para o comprimento L da viga. 𝑑2𝛿 𝑑𝑥2𝐸𝐼 = −𝑃 𝑎 𝐿𝑥 ( 3.11 ) 𝐸𝐼𝛿 = −1 6𝑃 𝑎 𝐿𝑥 3+ 𝐶 1𝑥 + 𝐶2 ( 3.12 ) A B C P
L
a x T M D 𝑅𝐴 = 𝑃 𝑎 𝐿Utilizando as condições de fronteira apresentadas na Figura 3.8, em que numa viga simplesmente apoiada, no apoio A (x=0) a flecha é nula. Substituindo esta condição na Equação
(3.12) é possível obter C2=0.
Por outro lado, no apoio B (x=L) tem-se também uma flecha nula, substituindo assim essa
condição fronteira na Equação (3.12) determina-se a constante de integração C1, sendo esta
apresentada na Equação (3.13).
𝐶1 = +1
6𝑃𝑎𝐿 ( 3.13 )
Substituindo a constante de integração C1 na Equação (3.12), considerando a segunda constante
de integração nula, obtém-se a Equação (3.14), esta permite calcular a flecha entre o apoio A e B do sistema referido. 𝛿 =𝑃𝑎𝐿 2 6𝐸𝐼 [ 𝑥 𝐿− ( 𝑥 𝐿) 3 ] ( 3.14 )
Cálculo da Flecha Casos Apresentados em Tabelas Técnicas
Este estudo apresenta no Capítulo 4, o cálculo de flechas em sistemas disponibilizados em diversas tabelas nas referências [27] [28].
A Tabela 3.1 são apresentados dois casos utilizados neste trabalho.
Tabela 3.1-Tabelas técnicas de flechas para vigas (adaptado [27] [28]) Viga e carregamento Equação diferencial elástica
Para 𝑥 ≤1 2𝐿: 𝛿 = 𝑃 48𝐸𝐼(4𝑥 3− 3𝐿2𝑥) Para 𝑥 < 𝑎: δ = 𝑃𝑏 6𝐸𝐼𝐿[𝑥 3− (𝐿2− 𝑏2)𝑥] Método da Sobreposição
Um sistema pode estar submetido a vários esforços, podendo ser concentrados ou distribuídos ao longo do elemento em análise, o que torna o cálculo mais complexo.
Capítulo 3| Fundamentos teóricos A deformação causada por um conjunto de cargas pode ser determinada, segundo o método de sobreposição, através da soma das deformações provocadas pelas cargas individualmente. A Figura 3.11 apresenta o princípio deste método, onde o cálculo da flecha total do sistema causado pelas duas cargas é igual à soma individual dos dois sistemas.
Este método torna-se assim bastante útil, uma vez que a maioria dos manuais de engenharia mecânica apresentam expressões para o cálculo das flechas ao longo de uma viga para sistemas mais simples.
Figura 3.11-Método de sobreposição (adaptado [25])
3.5 Teoria da Plasticidade
Os métodos utilizados pelos projetistas de transformadores de potência têm incidido na teoria elementar da resistência de materiais, devido à sua simplicidade de cálculo. Atualmente, tendo em conta a competitividade que existe nestes mercados, há a necessidade de restringir ao máximo os diversos dos componentes estruturais de tal forma que em alguns casos estarão com o comportamento no domínio plástico.
Neste contexto, a Efacec em conjunto com o Departamento de Engenharia Mecânica da Universidade do Minho, desenvolveu trabalhos neste campo obtendo curvas do comportamento elasto-plástico para diferentes ligas, utilizadas até então. Estes resultados estão apresentados na referência [29].
Com avanços dos métodos computacionais, como é o caso dos elementos finitos, e com o comportamento do material no seu domínio plástico, adquire-se os recursos necessários para estudos não lineares dos diversos componentes do transformador.
Curva Tensão-Extensão no Domínio Elástico Plástico
Uma curva de tensão-extensão de um material é obtida através de ensaios de tração, estes ensaios têm como base a norma ISO 6892-1:2009 [30], com o intuito de validar os testes, podendo posteriormente utilizar valores obtidos do material base nos projetos de dimensionamento.
=
+
a1 b 2 b1 l b1 a1 l a2 b2 l P1 P2 P1 P 2Uma vez que, no decorrer dos ensaios de tração, os valores da curva tensão-extensão são relativos às dimensões iniciais do provete, tal quer dizer que as tensões calculadas não correspondem à realidade. Portanto, deve-se utilizar-se a curva tensão-extensão verdadeira, uma vez que, esta tem em conta a variação de área instantânea da secção do provete ao longo do ensaio.
Na Figura 3.12 é possível visualizar as diferenças entre a curva nominal e curva tensão verdadeira.
Neste estudo, foi utilizada a curva tensão verdadeira-extensão verdadeira obtidas na referência [29].
Figura 3.12-Comparação entre curva tensão nominal-extensão nominal e a curva tensão verdadeira-extensão verdadeira [25]
3.6 Dinâmica de Estruturas
O dimensionamento da estrutura de acoplamento relativamente às solicitações dinâmicas resultantes do evento de curto-circuito, tem sido alvo de investigação com bastante importância para o desenvolvimento de transformadores mais competitivos.
Um modelo de análise dinâmica é constituído por três componentes: um componente com capacidade de armazenar energia potencial, sendo este elemento representado por uma mola; um componente responsável por armazenar a energia cinética, o elemento massa; por último, um componente responsável pela dissipação da energia, o elemento amortecedor.
Sendo os componentes do sistema de três tipos, relacionando a força com o deslocamento, velocidade e a aceleração.
O modelo dinâmico básico é constituído pelos componentes acima referidos. Na Figura 3.13 é apresentado o seguinte modelo tendo este apenas um grau de liberdade, uma vez que a posição instantânea é dada por u(t), que representa um deslocamento linear.
Capítulo 3| Fundamentos teóricos
Figura 3.13-Modelo dinâmico e diagrama de corpo livre [31]
Tendo em conta, o diagrama de corpo livre apresentado na Figura 3.13, aplicando a 2º Lei de Newton, é possível obter equação de equilíbrio dinâmico (3.15).
𝑚𝑢̈ + 𝑐𝑢̇ + 𝑘𝑢 = 𝐹(𝑡) ( 3.15 )
Para determinar o movimento do corpo acima referido é necessário resolver a equação (3.15) em que u apresenta o deslocamento ao longo do tempo.
Nesta investigação, a força aplicada na estrutura de acoplamento é relativa aos esforços gerados durante o curto-circuito.
Na referência [6] são apresentados modelos dinâmicos com vários graus de liberdade, em que é estudado o comportamento dos enrolamentos num transformador tipo Core, em relação aos componentes axiais e radiais inerentes nos esforços de curto-circuito.
Os métodos de elementos finitos utilizam a equação (3.16) [32], a diferença entre esta e a (3.15) é em relação ao número de graus de liberdade utilizados, uma vez que nos elementos finitos tem em consideração n graus de liberdade.
[𝑀]𝑡+∆𝑡{𝑈̈} + [𝐶]𝑡+∆𝑡{𝑈}̇ + [𝐾]𝑡+∆𝑡{𝑈} = {𝑅} ( 3.16 ) Onde: [𝑀] − Matriz de massa {𝑈̈} −Vetor de aceleração [𝐶] −Matriz de amortecimento {𝑈}̇ −Vetor de velocidade [𝐾] − Matriz de rigidez {𝑈} −Vetor deslocamento {𝑅} −Vetor de forças aplicadas
Na equação diferencial (3.16), caso o número de liberdade seja muito elevado irá resultar no aumento da ordem das matrizes, que poderá complicar o cálculo das soluções do sistema. Na referência [32] são apresentados alguns métodos utilizados para a resolução deste tipo de problemas.
Nas simulações não-lineares realizadas no Capítulo 5, é utilizado a integração direta. Existem vários métodos de integração direta, neste trabalho apenas será apresentado o método de
Newmark, uma vez que, este é utilizado pelo software Ansys.
Neste contexto, será apresentado o método iterativo e de integração utilizado no Ansys.
Métodos iterativos
Nos modelos numéricos, a solução apresentada é calculada de uma forma aproximada. No
Ansys o método utilizado é o de Newton-Raphson. Na Figura 3.14 é possível visualizar uma
janela do software onde indica o método iterativo utilizado pelo software.
Este método realiza o cálculo do problema ao longo de várias iterações. Em cada 𝑖 + 1, os
valores iniciais utilizados são relativamente à iteração anterior. Numa simulação numérica, o aumento da precisão na convergência levará a um incremento do número de iterações, que por sua vez resultará num aumento de tempo de simulação.
Figura 3.14-Método iterativo no Ansys
Segundo a referência [32] o método anteriormente descrito utiliza a equação (3.17) abaixo apresentada. 𝐾 𝑡+∆𝑡 (𝑖−1)∆𝑈(𝑖) = 𝑡+∆𝑡𝑅 − 𝑡+∆𝑡𝐹(𝑖−1) ( 3.17 ) Onde: 𝐾(i−1) = [𝜕𝐹 𝜕𝑈]𝑡+∆𝑡∆U(i−1) t+∆t ;
![Figura 2.12- Sistema de aperto (adaptado de [17])](https://thumb-eu.123doks.com/thumbv2/123dok_br/17610720.820346/37.892.122.758.112.560/figura-sistema-de-aperto-adaptado-de.webp)
![Figura 2.14-Curva “banheira”, falhas em transformadores em função do tempo de vida (adaptado de [19])](https://thumb-eu.123doks.com/thumbv2/123dok_br/17610720.820346/39.892.239.640.423.666/figura-curva-banheira-falhas-transformadores-função-tempo-adaptado.webp)
![Figura 2.15-Tipo de falha, custo de reparação em função de frequência (adaptado de [20])](https://thumb-eu.123doks.com/thumbv2/123dok_br/17610720.820346/40.892.141.751.260.677/figura-tipo-falha-custo-reparação-função-frequência-adaptado.webp)
![Figura 3.6-Diagrama de tensões de corte numa secção retangular (adaptado [25])](https://thumb-eu.123doks.com/thumbv2/123dok_br/17610720.820346/47.892.193.695.251.481/figura-diagrama-tensões-corte-numa-secção-retangular-adaptado.webp)
![Figura 3.8-Condições de fronteira de uma viga encastrada e de uma viga simplesmente apoiada (adaptado [27])](https://thumb-eu.123doks.com/thumbv2/123dok_br/17610720.820346/48.892.135.749.866.1046/figura-condições-fronteira-viga-encastrada-simplesmente-apoiada-adaptado.webp)
![Figura 3.12-Comparação entre curva tensão nominal-extensão nominal e a curva tensão verdadeira-extensão verdadeira [25]](https://thumb-eu.123doks.com/thumbv2/123dok_br/17610720.820346/52.892.278.619.386.645/figura-comparação-tensão-nominal-extensão-verdadeira-extensão-verdadeira.webp)
![Figura 3.16-Aceleração constante segundo o método Newmark (adaptado [32])](https://thumb-eu.123doks.com/thumbv2/123dok_br/17610720.820346/56.892.277.603.106.384/aceleração-constante-newmark-adaptado-.webp)