1 INTRODUÇÃO
Quando se pensa em alguém aprendendo uma habilidade motora vem à mente, num primeiro momento, insucessos ou desempenhos apenas razoáveis até que o aprendiz comece a apresentar bons resultados. A expressão “está aprendendo” também permite deduzir que o aprendiz está melhorando, mas que o desempenho ainda é muito instável, apresentando muitas inconsistências. Professores e treinadores, pautados em sua experiência profissional, afirmam que uma habilidade motora está realmente aprendida no momento em que o desempenho de seu aluno/atleta torna-se consistente, o que acontece quando o resultado é alcançado com sucesso repetidas vezes. De acordo com teorias tradicionais de aprendizagem motora, que estão baseadas em modelo de redução do erro ou neutralização do desvio – chamado modelo de equilíbrio –, quando se alcança esse estado de proficiência pode-se afirmar que o aprendiz automatizou seu movimento e, portanto, atingiu a última fase da aprendizagem.
Ao definir aprendizagem motora nessa perspectiva tradicional, SCHMIDT e LEE (1999) afirmam que ela é um conjunto de processos associados à prática ou experiência, levando a mudanças relativamente permanentes na capacidade para o movimento. Essa característica de ser relativamente permanente permite inferir que uma vez que o aprendiz praticou e aprendeu uma habilidade, ele passou por mudanças irreversíveis e nunca mais será o mesmo: é agora capaz de realizar algo que não fazia antes, com consistência e precisão.
Mas o que acontece com essa capacidade para o movimento que foi adquirida? Ela se torna imutável? Ou sua estrutura original ainda pode mudar com o tempo e/ou prática? Uma boa pista na busca de respostas para essas perguntas é a observação de atletas reconhecidamente habilidosos: a excelência de seu desempenho não é fruto de mera repetição de movimentos estereotipados mas, muito mais que isso, eles parecem sempre ter uma surpresa reservada para os momentos mais difíceis, muitas vezes realizando movimentos inesperados que os levam ao objetivo desejado.
entanto, é importante ressaltar que, com a continuidade da prática, essa estabilidade de desempenho poderá apresentar flutuações que são diferentes das inconsistências do início do processo. Tais flutuações podem estar relacionadas à variabilidade inerente ao próprio sistema biológico humano, mas também podem ser características do sistema associadas à capacidade do indivíduo de alterar seu comportamento para manter o desempenho diante de diferentes e inesperadas perturbações. Em outras palavras, o habilidoso pode ser entendido como aquele que aproveita a capacidade de movimento que foi adquirida e estabilizada, adaptando-a para outras situações e outros contextos sempre com vistas a alcançar o objetivo da tarefa, o que envolve o uso construtivo da variabilidade. Essa visão de aprendizagem motora vai além daquelas propostas pelas teorias tradicionais, que consideram a estabilização do desempenho como o final do processo de aprendizagem.
A presente pesquisa fundamenta-se numa visão de aprendizagem motora que a considera um processo contínuo de mudança de comportamento. Em outras palavras, num modelo teórico que se propõe a explicar o processo de aquisição de habilidades motoras para além da estabilização do desempenho, caracterizando um sistema afastado do equilíbrio: o modelo do Processo Adaptativo.
Metateorias da ciência como a Teoria Geral dos Sistemas (BERTALANFFY, 1975), Teoria dos Sistemas Complexos (GELL-MANN, 1996), Teoria Hierárquica (PATTEE, 1973) ressaltam o ser humano como um sistema aberto e complexo. Essas características capacitam-no para ser um sistema adaptativo, ou seja, sua resposta à perturbação leva o sistema de um estado de estabilidade para outro, num nível superior de complexidade. Este, basicamente, é o pressuposto básico do qual surge a proposta teórica do Processo Adaptativo em aprendizagem motora.
(BENDA, CORRÊA, LUSTOSA DE OLIVEIRA & TANI, 2000), dardo de salão (CORRÊA, BENDA & TANI, 2001), tarefas complexas de timing coincidente (por exemplo, BENDA, 2001; CORRÊA, 2001; UGRINOWITSCH, 2003); a ordem hierárquica entre respostas (TANI, 1995) e a interação entre estados de estabilização e tipo de perturbação (UGRINOWITSCH, 2003). Outros estudos sob essa mesma abordagem testaram o efeito de fatores da aprendizagem, como o fator estrutura de prática em tarefas complexas de timing coincidente (por exemplo, CORREA, 2001; PAROLI, 2004; CORRÊA, GONÇALVES, BARROS, MASSIGLI, 2006), e o fator conhecimento de resultados em tarefa conjugada de preensão manual e posicionamento linear (MEIRA JÚNIOR, 2005) e tarefa de força de preensão manual (TANI, MEIRA JÚNIOR & GOMES, 2005).
O estudo de TANI em 1995 foi um dos pioneiros realizados sob o escopo teórico do Processo Adaptativo; utilizando uma tarefa seriada de rastreamento de um padrão luminoso ele mostrou a importância da relação estado do sistema-perturbação, em outras palavras, mostrou que se a perturbação é introduzida quando o sistema guarda em si certa redundância, ele é capaz de responder à ela e adaptar-se; também mostrou evidências empíricas da organização hierárquica no processo de aquisição de habilidades motoras, pois, ao sofrer a perturbação, o sistema se adaptou num nível hierárquico imediatamente inferior de resposta.
UGRINOWITSCH (2003) testou distintos níveis de estabilização em uma tarefa complexa de timing coincidente e confirmou que o nível de estabilização do sistema é condição para que ele se adapte à perturbação, corroborando os achados de TANI (1995). Seu estudo acrescentou que diferentes exigências perceptivas, motoras e perceptivo-motoras, constituem distintos graus de perturbação no sistema em uma tarefa complexa de timing coincidente, sendo a perceptiva aquela que impõe menor demanda ao sistema e a perceptivo-motora a que impõe a maior demanda. Em outras palavras, encontrou evidências de hierarquia também nas perturbações impostas ao sistema.
tais evidências ainda não foram estatisticamente significativas.
Em suma, os estudos têm alcançado resultados que vão ao encontro de proposições básicas do modelo do Processo Adaptativo, a saber, a evidência da existência de momentos de instabilidade e estabilidade que caracterizam as fases de Estabilização e Adaptação e da ordem hierárquica entre elas.
Outra das proposições fundamentais do modelo do Processo Adaptativo é que esses momentos de instabilidade e estabilidade se alternam indefinidamente, uma vez que a aprendizagem nunca termina, o que caracteriza o contínuo ciclo Instabilidade-Estabilidade-Instabilidade (I-E-I) no processo de aprendizagem motora.
No entanto, os estudos têm testado apenas um ciclo I-E-I, que está representado na FIGURA 1 pela elipse de linha contínua.
FIGURA 1 – Representação esquemática dos ciclos sucessivos de
Instabilidade-Estabilidade-Instabilidade no Processo
Adaptativo
Nesse sentido, algumas dúvidas permanecem: o que aconteceria com o sistema se ele fosse levado a completar mais um ciclo de I-E-I? Essa pergunta se desdobra em outras como: os sujeitos se adaptarão nesse segundo ciclo? Alguns sujeitos serão mais rápidos em se adaptarem comparativamente ao primeiro ciclo? Que tipo de competência o sujeito transporta de um ciclo para outro?
Assim, o presente trabalho pretende dar continuidade ao estudo da aprendizagem motora na perspectiva do modelo teórico denominado de Processo Adaptativo, analisando o comportamento do sistema em dois ciclos consecutivos de I-E-I, conforme mostra esquematicamente a elipse tracejada na FIGURA 1.
prática
...
As principais perguntas são as seguintes:
1) Haverá alteração no desempenho ao passar por dois ciclos sucessivos de I-E-I?
2) Existe efeito do nível de estabilização alcançado no primeiro ciclo para o segundo ciclo de I-E-I?
3) Os sujeitos irão se diferenciar, em termos de desempenho no segundo ciclo, por terem atingido precocemente ou tardiamente o nível de estabilização no primeiro ciclo?
E as hipóteses de pesquisa referentes a tais questões são:
A. Os sujeitos passarão por fases sucessivas de estabilização e adaptação, com alterações no desempenho, o que indica aumento na complexidade do sistema ao longo do processo;
B. Haverá efeito do nível de estabilização alcançado no ciclo anterior de I-E-I no ciclo posterior;
C. Sujeitos que alcançaram a estabilização no primeiro ciclo mais
precocemente, responderão com desempenhos em níveis hierarquicamente superiores quando comparados com sujeitos que alcançaram a estabilização tardiamente.
A primeira seção da Revisão de Literatura teve por objetivo identificar mudanças na visão de mundo que levaram à abordagem sistêmica e descrever as principais características dos sistemas complexos e como elas podem ser identificadas no processo de aprendizagem motora.
A terceira seção da Revisão da Literatura se dispôs a evidenciar a mudança no comportamento - aprendizagem motora - como sendo fruto de um processo infinito e alternado de estabilidade e instabilidade, em resposta às perturbações impostas de forma deliberada ou espontânea à estrutura do sistema; a noção de adaptação é então apresentada.
Na quarta seção, modelos sistêmicos de equilíbrio e não-equilíbrio em aprendizagem motora são apresentados de modo a evidenciar as limitações de modelos de equilíbrio, que podem ser considerados finitos e estáticos, para tratar o fenômeno da aprendizagem; o modelo de não-equilíbrio denominado Processo Adaptativo para aprendizagem motora é apresentado e evidências experimentais desse modelo são descritas. Finalmente, nessa mesma seção, a tarefa de rastreamento de um padrão seriado luminoso é apresentada como sendo uma que tem características próprias para o estudo da formação e a reorganização da estrutura em habilidades motoras.
A seção “Materiais e Método” explicita as características dos sujeitos, da tarefa e os desenhos experimentais utilizados para os dois experimentos. O Experimento 1 dá suporte para definição do Intervalo Inter-estímulo da fase inicial do Experimento 2, e este, por sua vez, é considerado o experimento principal com o qual se pretendeu responder às questões de pesquisa.
A seção de “Resultados” se inicia pela descrição e análise do Experimento 1; a seguir, os resultados do Experimento 2 são descritos e analisados e, posteriormente, é feito um reagrupamento dos sujeitos desse experimento de forma a buscar responder a terceira questão proposta no presente estudo.
A seção “Discussão” se propôs a interpretar os resultados à luz dos conceitos desenvolvidos na Revisão da Literatura, assim como fazer considerações sobre o desenvolvimento do próprio trabalho. A seção “Conclusões” resume os principais achados desse trabalho.
2 OBJETIVOS e DELIMITAÇÃO
2.1 Objetivo geral
Investigar o processo de aquisição de habilidades motoras, conforme proposto pela abordagem teórica do Processo Adaptativo, testando dois ciclos de I-E-I sob o efeito de modificações temporais em uma tarefa seriada de rastreamento de padrão luminoso.
2.2 Objetivos específicos
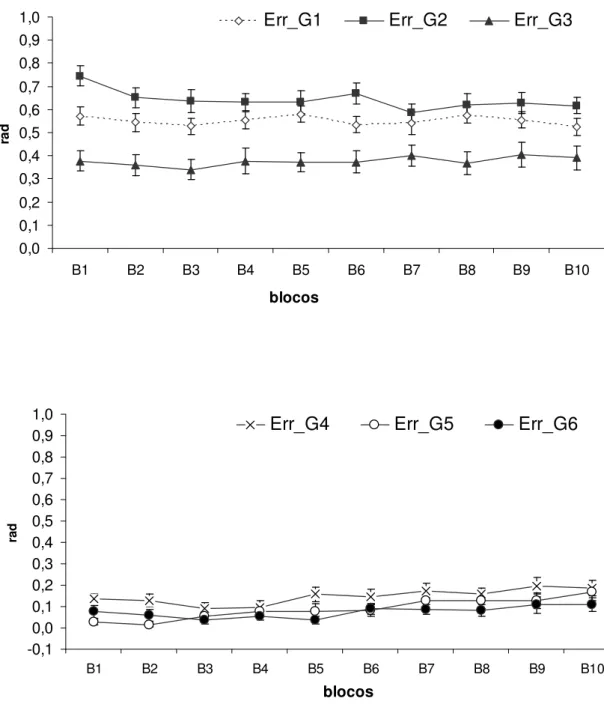
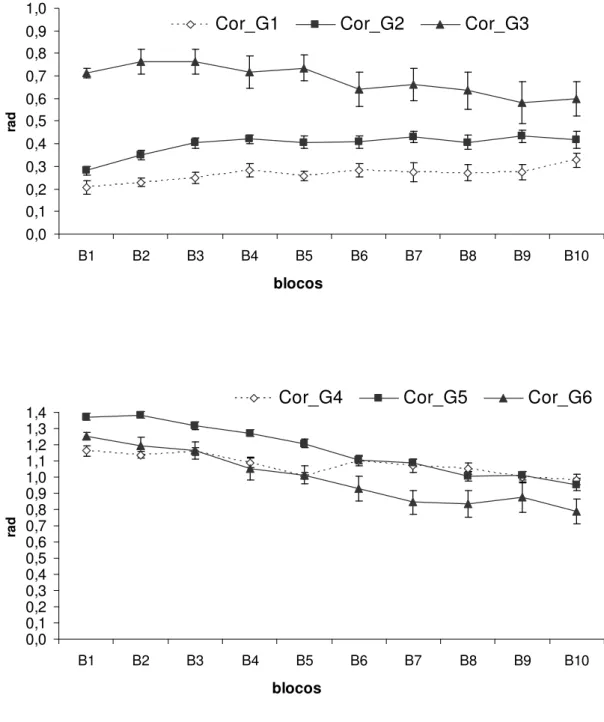
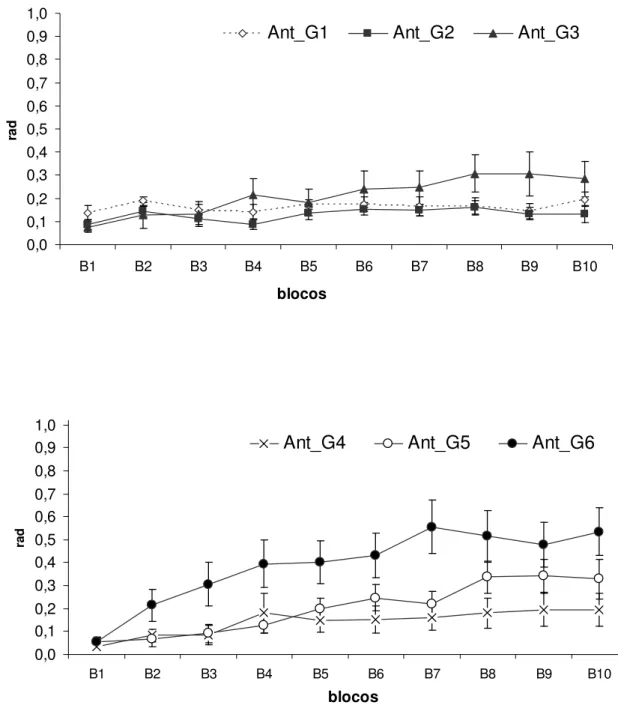
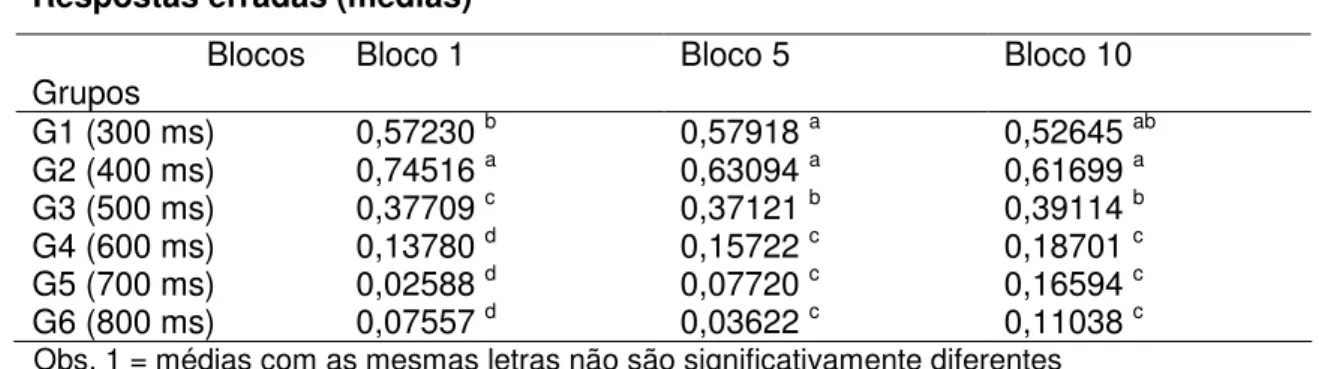
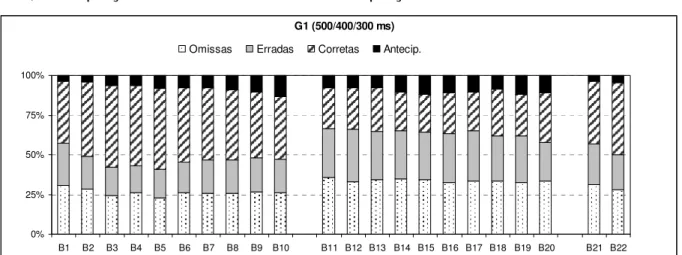
• Analisar dois ciclos de I-E-I mediante medidas qualitativas de
desempenho, a saber: respostas omissas, erradas, corretas e antecipatórias;
• Testar se na continuidade dos ciclos de I-E-I, o sistema se torna capaz de responder às perturbações de maior magnitude;
• Testar o efeito do nível de estabilização em dois ciclos consecutivos mediante a perturbação imposta ao sistema ao longo desses ciclos;
• Analisar o desempenho dos sujeitos que alcançaram a estabilização no primeiro ciclo precocemente ou tardiamente para verificar se isso configura uma vantagem para o sistema.
2.3 Delimitação
Este estudo, incorporando a noção de que um sistema complexo pode ser identificado, descrito e estudado a partir de vários níveis de análise, se propôs especificamente a utilizar medidas funcionais de desempenho categorizadas em respostas omissas, erradas, corretas e antecipatórias, no nível comportamental de análise, na tarefa de rastreamento de um padrão seriado luminoso.
3 REVISÃO DA LITERATURA
3.1 A abordagem sistêmica
Investigar o comportamento do homem quando ele está envolvido com o processo de aquisição de uma habilidade motora é tarefa das mais intrincadas, pois se trata de um fenômeno complexo do qual depende quase toda a nossa atividade de vida diária, e por isso mesmo tão importante. Além disso, tal como acontece com outros fenômenos em outras áreas de investigação, o paradigma científico que uma comunidade partilha é um fator interveniente que estabelece os contornos teóricos na abordagem do fenômeno.
O paradigma mecanicista, baseado na Física, formou os fundamentos da ciência clássica, cartesiana, e a metáfora da máquina tem raízes profundas no pensamento científico em todas as áreas. De acordo com MILLER (1968), na história do pensamento científico, quando a mecânica de Newton estava florescendo, afirmava-se que os animais (inclui-se aqui o homem) não eram “nada mais” do que máquinas, similares e um pouco mais complicadas do que um relógio. Posteriormente, durante o desenvolvimento da termodinâmica, afirmava-se que os animais eram “nada mais” do que máquinas termodinâmicas (ou sistemas que trocam energia e produzem calor); com o desenvolvimento da Teoria da Informação os animais foram caracterizados como “nada mais” do que sistemas de comunicação.
realidade, de onde decorrem os esforços para colocar entre parênteses a subjetividade do cientista.
Fica evidente que as descobertas científicas, em especial na Física, foram, paulatinamente, moldando a visão de mundo das novas gerações. Mas o processo científico é eminentemente dinâmico levando ao inevitável questionamento desses pressupostos. Tais questionamentos redundaram no que hoje se pode denominar de paradigma sistêmico, conforme afirma ESTEVES DE VASCONCELOS (2003). Essa autora distingue os seguintes avanços em direção a um paradigma sistêmico: a) mudança do pressuposto de simplicidade para o de complexidade, no qual há o reconhecimento de que a simplificação obscurece as inter-relações entre os fenômenos, assim como o reconhecimento da causalidade recursiva; b) mudança do pressuposto da estabilidade para a instabilidade, da qual decorre a consideração da indeterminação com a conseqüente imprevisibilidade dos fenômenos, assim como sua irreversibilidade e a conseqüente incontrolabilidade; e c) mudança do pressuposto da objetividade para o reconhecimento de que não existe uma realidade independente de um observador.
De acordo com RASCH e WOLFE (2000), nas últimas décadas, as ciências naturais têm experimentado – usando uma bem conhecida frase de KUHN (1991) – uma mudança de paradigma fundamental, marcada pelo aumento no interesse em trabalhos que abordam a complexidade dos sistemas físico-biológicos.
Ainda de acordo com RASCH e WOLFE (2000) modelos conceituais e abordagens de um número de campos (por exemplo, Biologia, Comunicação, Física, Matemática) se juntaram sob a denominação de teoria de sistemas com os conceitos científicos tradicionais de causalidade linear, determinismo e reducionismo sendo substituídos ou suplementados por noções de causalidade circular, auto-organização, indeterminância e emergência de ordem a partir da desordem; a teoria dos sistemas propôs uma abordagem teórica e metodológica unificadas não só para investigar as simplicidades mecânicas clássicas, mas também as complexidades dos sistemas biológicos, cognitivos e sociais.
Von Bertalanffy, que teve início na primeira metade da década de 1950. Ao propor a Teoria Geral dos Sistemas (TGS), um modo de pensar que ultrapassa a análise das partes componentes e caminha em direção à compreensão da totalidade do organismo, BERTALANFFY (1975) definiu sistema como um complexo de elementos em interação ou um conjunto de componentes em estado de interação, usando-o como sinônimo de totalidade e organização. A interação entre os elementos é, portanto, a principal característica de um sistema (ESTEVES DE VASCONCELOS, 2003), e na definição de BUNGE (1980) o sistema é um “... objeto complexo cujas partes ou componentes se relacionam de tal modo que ele se comporta como uma unidade e não como um mero conjunto de elementos” (p. 89).
Desde a década de 1920, Bertalanffy era intrigado com as evidentes lacunas existentes na pesquisa e na teoria da Biologia, em que o enfoque mecanicista desprezava aquilo que é essencial ao fenômeno da vida – a totalidade ou sistema. Passou então a advogar uma concepção “organísmica” na Biologia, na qual o principal objetivo era a descoberta de organização em seus vários níveis. Assim, por um lado, o seu trabalho experimental sobre metabolismo e crescimento e, de outro, o esforço sobre o programa “organísmico” levaram Bertalanffy à TGS, baseado no fato de que o organismo é um sistema aberto (BERTALANFFY, 1975).
Existe uma série de modelos de sistemas mais ou menos avançados e complexos, porém, certos conceitos, modelos e princípios da TGS são largamente aplicáveis aos sistemas materiais, psicológicos e socioculturais, sistemas estes que têm as características de sistemas abertos. Importantes conceitos propostos por BERTALANFFY (1975) são os princípios da ordem hierárquica, eqüifinalidade, retroação (homeostase) e regulações primárias e secundárias.
No que diz respeito ao conceito de ordem hierárquica na construção mecanicista, mesmo o autômato de Turing no qual, em princípio, qualquer processo de qualquer complexidade pode ser algoritmizado, fracassa quando se trata de regulações subseqüentes a perturbações arbitrárias. Para fazer frente a tais perturbações um conceito é fundamental na TGS: a ordem hierárquica, que está intimamente relacionada com as questões de segregação progressiva e diferenciação, da evolução e da medida de organização.
Na segregação progressiva (BERTALLANFFY, 1975) o sistema passa de um estado de totalidade indiferenciada para um estado de partes distintas entre si; por exemplo, ao longo do processo de desenvolvimento embrionário, o indivíduo passa do estado de eqüipotencialidade para um estado no qual os órgãos se diferenciam e se desenvolvem em taxas distintas. Para ele há uma predominância da segregação na natureza viva, e isto parece estar no fato de a segregação implicar aumento de complexidade no sistema. Por exemplo, durante o processo de aprendizagem de um conjunto de estímulos (visuais, sonoros), que no início parecia um todo indiferenciado, o sistema aos poucos – mediante a prática deliberada – vai conseguindo distinguir os elementos e apreender regularidades do relacionamento entre eles, que formam o padrão de estímulos.
mas é uma conseqüência necessária do estado constante nos sistemas abertos. De acordo com o conceito de retroação, a direção da ação garante a estabilidade do sistema através da auto-regulação. É um mecanismo de correção do desvio utilizando o feedback negativo. Em termos biológicos corresponde à homeostase que é ligada aos ajustes metabólicos. A cibernética (WIENER, 1973), trata exclusivamente do fenômeno da retroação, a qual foi denominada posteriormente de cibernética de primeira ordem para diferenciá-la da cibernética de segunda ordem que trata de mecanismos de amplificação do desvio (MARUYAMA, 1968).
No entanto, para BERTALANFFY (1975), há outra regulação nos organismos vivos que é de natureza essencialmente diferente, a saber, aquela onde a ordem é efetuada por uma inter-relação dinâmica de processos, as chamadas regulações primárias – por exemplo, evolução, desenvolvimento embrionário –, que, pela sua natureza de interações dinâmicas, baseiam-se no fato de que o organismo é um sistema aberto que se mantém no estado estacionário ou se aproxima deste. As regulações secundárias (homeostase) – aquelas controladas por retroação – se sobrepõem às primárias, as quais são conseqüência de um princípio geral de organização que pode ser chamado mecanização progressiva. Assim, de início, os sistemas – biológicos, neurológicos, sociais etc. – são governados pela interação dinâmica de seus componentes (regulações primárias) e, mais tarde, se estabelecem disposições fixas e condições de coerção, que tornam o sistema e suas partes mais eficientes, mas diminuem sua eqüipotencialidade, até aboli-la. Pode-se partir da dinâmica (regulações primárias) para a retroação (regulações secudárias), mas não se pode partir da retroação para a dinâmica (BERTALANFFY, 1975).
família de equações diferenciais. Isto significa que, tendo passado por um estado crítico, o sistema inicia um novo modo de comportamento. Assim, por meio de funções gradativas, o sistema demonstra um comportamento adaptativo. O sistema “ensaia” diferentes modos e meios e estaciona temporariamente em um campo onde não entra mais em conflito com valores críticos do ambiente.
No que se refere à compreensão do contínuo processo de aquisição de habilidades motoras a partir de uma abordagem sistêmica, é preciso compreender que o comportamento humano é uma organização complexa e aberta, travando uma dura e contínua batalha contra a entropia, para alcançar estados/comportamentos cada vez mais complexos (ordenados, pouco previsíveis, sujeito a mudanças, cuja definição necessita de mais parâmetros do que aqueles que já existiam antes da perturbação).
No presente trabalho entende-se que estudar o fenômeno da aprendizagem motora é uma tarefa contingente, no sentido de que ela implica considerar propriedades biológicas, físicas e informacionais que se inter-relacionam dinamicamente necessitando, portanto, de uma abordagem denominada sistêmica.
As próximas seções e subseções se propõem a discutir os conceitos de sistemas complexos e abertos, complexidade, informação, perturbação, estabilidade e instabilidade, que são necessários para descrever e compreender adequadamente o processo contínuo de aquisição de habilidades motoras.
3.1.2 Sistemas complexos e a noção de complexidade no processo de
aprendizagem motora
De acordo com MENDES (2006), Ciências da Complexidade é o nome dado ao conjunto de técnicas e métodos que estudam: a) o comportamento complexo dos sistemas simples (chamados simples por terem poucos graus de liberdade); e b) o comportamento coletivo e estruturado dos sistemas chamados complexos por terem muitos graus de liberdade. No primeiro caso, a noção de complexidade está associada à dificuldade de prever o comportamento do sistema e no segundo caso, à criação de estruturas.
para distingui-lo do campo de estudos com o qual está intimamente relacionado: caos. Caos refere-se ao conjunto de fenômenos que evolui “previsivelmente de maneira imprevisível”, e é extremamente sensível às condições iniciais (GELL MANN, 1996; HORGAN, 1995). De acordo com KAUFFMAN (2001) e CILLIERS (2000) a teoria do caos é um subconjunto da teoria da complexidade e tipicamente trata com sistemas tendo variáveis contínuas, mas relativamente poucas e demonstra o famoso “efeito borboleta” ou sensibilidade às condições iniciais. Por outro lado, a teoria da complexidade tipicamente trata com sistemas de centenas ou milhares de partes interagindo (sistemas complexos) e tenta entender as propriedades coletivas emergentes do comportamento dinâmico de tais sistemas (GELL MANN, 1996; HORGAN, 1995).
Para CILLIERS (2000) e ROSEN (1985) uma definição de complexidade mesmo operacional ainda é muito elusiva, mas uma descrição útil estabelece que a complexidade em um sistema requer a existência de mais possibilidades de ação do que pode ser percebido realmente. Mas isso não é uma definição, uma vez que complexidade foge ao esquema de definições simplificadoras. Ao invés disso, a análise das características de sistemas complexos pode auxiliar a descrever o sistema complexo sem estar preso em uma definição a priori.
complexidade quando examinados mais proximamente; outros parecem complexos, mas podem ser descritos simplesmente, dividindo o sistema em partes. A idéia de complexidade representa a superação da visão que pretendeu descobrir princípios simplificadores nos fenômenos e sistemas irredutíveis, passando a se referir, portanto, a uma realidade muito mais ambígua e ambivalente (ATLAN, 1992; TESCAROLO, 2003).
CILLIERS (2000) desenvolveu uma descrição detalhada das características de um sistema complexo e de seu comportamento, fundamentada nas descrições de NICOLIS e PRIGOGINE (1989). Apesar de ser extenso, mas por tratar-se de uma síntese muito esclarecedora, será mantida a citação de CILLIERS (2000) na sua totalidade (p.3, 4 e 5):
i. "Complex systems consist of a large number of elements. When the number is relatively small, the behavior of the elements can often be given a formal description in conventional terms. However, when the number becomes sufficiently large, conventional means (e.g. a system of differential equations) not only become impractical, they also cease to assist in any understanding of the system
ii. A large number of elements are necessary, but not sufficient. The grains of sand on a beach do not interest us as a complex system. In order to constitute a complex system, the elements have to interact, and this interaction must be dynamic. A complex system changes with time. The interactions do not have to be physical; they can also be thought of as the transference of information.
iii. The interaction is fairly rich, i.e. any element in the system influences, and is influenced by, quite a few other ones. The behaviour of the system, however, is not determined by the exact amount of interaction associated with specific elements. If there are enough elements in the system (of which some are redundant), a number of sparsely connected elements can perform the same function as that of one richly connected element. iv. The interactions themselves have a number of important characteristics.
can usually be collapsed into an equivalent system that is very much smaller. Non linearity also guarantees that small causes can have large results, and vice-versa. It is precondition for complexity.
v. The interactions usually have a fairly short range, i.e. information is received primarily from immediate neighbours. Long range interaction is not impossible, but practical constraints usually force this consideration. This does not preclude wide-ranging influence – since the interaction is rich, the route from an element to any can usually be covered in few steps. As a result, the influence gets modulated along the way. It can be enhanced, suppressed or altered in a number of ways.
vi. There are loops in the interactions. The effect of any activity can feed back onto itself, sometimes directly, sometimes after a number of intervening stages. This feedback can be positive (enhancing, stimulating) or negative (detracting, inhibiting). Both kinds are necessary. The technical term for this aspect of a complex system is recurrency.
vii. Complex systems are usually open systems, i.e. they interact with their environment. As a matter of fact, it is often difficult to define the border of a complex system. Instead of a being a characteristic of the system itself, the scope of the system is usually determined by the purpose of the description of the system, and is thus influenced by the position of the observer. This process is called framing. Closed systems are usually merely complicated.
viii. Complex systems operate under conditions far from equilibrium. There has to be a constant flow of energy to maintain the organization of the system and to ensure its survival. Equilibrium is another word to the death.
ix. Complex systems have a history. Not only do they evolve through time, but their past is co-responsible for their present behaviour. Any analysis of a complex system that ignores the dimension of time is incomplete, or at most a synchronic snapshot of a diachronic process.
point is vitally important. If each element “knew” what was happening to the system as a whole, all of the complexity would have to be present in that element. This would either entails a physical impossibility in the sense that the single element does not have a necessary capacity, or constitute a metaphysical move in the sense that ‘consciousness’ of the whole is contained in one particular unit. Complexity is the result of a rich interaction of simple elements that only respond to the limited information each of them are presented with. When we look at the behaviour of a complex system as a whole, our focus shifts from the individual element in the system to the complex structure of the system. The complexity emerges as a result of the patterns of interaction between the elements.1
i. 1 Sistemas complexos consistem de um grande número de elementos. Quando o
número é relativamente pequeno, o comportamento dos elementos freqüentemente pode ser descrito em termos convencionais. Contudo, quando o número torna-se suficientemente grande, meios convencionais (por exemplo, sistema de equações diferenciais) não somente são impraticáveis, eles também não permitem a compreensão do sistema.
ii. Um grande número de elementos é necessário, mas não suficiente. Os grãos de areia de uma praia não nos interessam como sistema complexo. De modo a constituir um sistema complexo, os elementos têm que interagir e essa interação tem que ser dinâmica. Um sistema complexo muda com o tempo. As interações não têm de ser físicas; elas também podem ser pensadas como transferência de informação.
iii. A interação é moderadamente rica, isto é, qualquer elemento do sistema influencia e é influenciado por uns poucos outros. O comportamento do sistema, contudo, não é determinado pela exata quantidade de interações associadas com elementos específicos. Se existem elementos suficientes no sistema (dos quais alguns são redundantes), um número de elementos esparsamente conectados pode desempenhar a mesma função daqueles elementos ricamente conectados.
v. As interações usualmente têm uma amplitude moderadamente curta, isto é, informação é recebida primariamente dos vizinhos próximos. Interações de longo alcance não são impossíveis, mas restrições práticas usualmente forçam essa consideração. Isto não impede a influência à longa distância – uma vez que a interação é rica, a rota de um elemento para qualquer outro pode usualmente ser coberto em uns poucos passos. Como resultado, a influência é modulada ao longo do caminho. Ela pode ser aumentada, suprimida ou alterada de várias maneiras.
vi. Existem loops nas interações. O efeito de qualquer atividade pode retroalimentar-se,
algumas vezes diretamente, algumas vezes após um número de estágios intervenientes. Esse feedback pode ser positivo (aumentando, estimulando) ou negativo
(detratando, diminuindo). Ambos são necessários. O termo técnico para esse aspecto dos sistemas complexos é recorrência.
vii. Sistemas complexos são usualmente sistemas abertos, isto é, interagem com seu ambiente. O que importa é que é freqüentemente difícil definir os limites de um sistema complexo. Ao invés de ser uma característica do próprio sistema, o limite do sistema é usualmente determinado pela descrição do sistema e é, assim, freqüentemente influenciado pela posição do observador. Esse processo é chamado enquadramento. Sistemas fechados geralmente são simplesmente complicados.
viii. Sistemas complexos operam sob condições afastadas do equilíbrio. Deve existir um fluxo constante de energia para manter a organização do sistema e assegurar sua sobrevivência. Equilíbrio é outra palavra para a morte.
ix. Sistemas complexos têm uma história. Não somente evoluem através do tempo, mas seu passado é co-responsável pelo seu comportamento presente. Qualquer análise de um sistema complexo que ignore a dimensão do tempo é incompleta, ou é uma fotografia instantânea sincrônica de um processo diacrônico.
Num exercício para evidenciar como essas características podem ser descritas num nível comportamental de análise, o comportamento desempenhado pelo sujeito perante o processo de aprendizagem motora humana pode ser entendido como um sistema complexo, de acordo com as seguintes características:
1. Muitos elementos compõem o comportamento humano no processo de aquisição de uma habilidade motora, quais sejam: elementos individuais (percepção, experiência anterior, nível de desenvolvimento, fase de aprendizagem, motivação etc.), elementos ambientais (estrutura física do ambiente, temperatura, interação com outros indivíduos ou não, delimitação do espaço etc.) e elementos inerentes à tarefa (meta, instrução, feedback, estrutura de prática etc.);
2. Os vários elementos interagem e mudam continuamente à medida que a prática avança e, mesmo após ter aprendido uma dada habilidade, o indivíduo estabelece novas metas e o processo se desdobra contínua e dinamicamente;
3. Para a aprendizagem de uma habilidade, certas capacidades são requeridas mais do que outras, mas elas não determinam o sucesso final; 4. A interação entre os elementos é não-linear: por exemplo, uma dica –
informação reduzida – pode causar uma grande mudança no comportamento;
5. Os comportamentos são específicos às restrições impostas pelas condições locais;
6. O mecanismo de feedback negativo atua no comportamento ao utilizar o erro de desempenho como informação que retroalimenta o sistema com o propósito de diminuir o desvio, corrigir o movimento; já o mecanismo de feedback positivo tende a ampliar ou acentuar o desvio, intensificando cada vez mais os efeitos do erro e tal mecanismo pode conduzir a mudanças drásticas no comportamento. Ambos os mecanismos são necessários no comportamento durante o contínuo processo de aprendizagem motora;
7. As propriedades do homem, do ambiente e da tarefa durante o processo de aquisição de uma habilidade motora interagem de forma que se possa apreciar seu comportamento como um todo, como um sistema. A manutenção e a evolução desse comportamento dependem da troca de energia e informação com o ambiente. É o que o caracteriza como um sistema aberto: ele permanece constante em sua totalidade, enquanto houver fluxo contínuo de seus componentes (BERTALANFFY, 1975); 8. Uma vez que, durante o processo de aprendizagem, o sistema é
constantemente perturbado pelas demandas variáveis da tarefa, do ambiente e do próprio organismo, existe um fluxo irregular de energia e informação que mantém o sistema afastado do equilíbrio;
9. As experiências anteriores armazenadas na memória, o nível de desenvolvimento e a fase de aprendizagem formam estruturas a partir das quais se constrói novas habilidades motoras;
Muito recentemente, MAYER-KRESS, LIU e NEWELL (2006), teóricos da área do comportamento motor dentro da perspectiva dinâmica, afirmaram que o movimento humano revela marcantes características de sistemas complexos, quais sejam, múltiplas interações entre subsistemas, entre níveis de análise, emergência de modos de coordenação, entre outras, mas reconhecem que o construto da complexidade não tem sido apropriadamente tratado. Nas suas palavras:
“The construct of complexity is usually not invoked in this theoretical framework but this contemporary research on human movement is largely consistent with the theoretical and experimental foci of a complex systems perspective.”2(p. 41).
A próxima seção trata do aumento de complexidade nos sistemas abertos e complexos.
3.2 O aumento de complexidade e a redundância do sistema
Um aspecto fundamental da teoria de sistemas assenta-se nas noções de termodinâmica que permeiam as explicações do comportamento dos sistemas biológicos. A termodinâmica está baseada em duas grandes leis, sendo que a primeira delas diz que o conjunto de matéria e energia permanece constante no universo; já a segunda lei aponta que nos sistemas isolados e fechados, a desordem aumenta em função do tempo (BRUSCHI, 2003; SCHNEIDER & KAY, 1997). Se na mecânica clássica se admitia a reversibilidade do tempo, a termodinâmica mostrou que, irreversivelmente, “...o tempo implica degradação e morte” (PRIGOGINE & STENGERS, 1984, p. 129). Assim, em sistemas fechados, à medida que o sistema transforma energia, cada vez menos dela permanece em uma forma utilizável e a desordem do sistema aumenta (CILLIERS, 2000).
não está isolado: ele é um sistema aberto e, portanto, está em constante troca de energia e informação com seu ambiente, o que o leva para estados cada vez mais complexos e organizados. Portanto, esses estados mais organizados são alcançados contrariando a Segunda Lei da Termodinâmica, pela qual, com a passagem do tempo, os sistemas tendem à desordem. De acordo com SCHNEIDER e KAY (1997), SCHRÖDINGER (1944, 1989) aproximou os processos fundamentais da Biologia aos das Ciências Físicas e resolveu esse dilema: a aparente contradição do aumento de ordem em sistemas vivos desaparece na generalização da termodinâmica clássica para incluir sistemas abertos, a chamada termodinâmica irreversível de não-equilíbrio. Nos sistemas abertos existe tanto produção de entropia, que é a medida de desordem do sistema que acontece mediante processos irreversíveis, quanto transporte de entropia negativa, ou seja, sistemas abertos podem exibir processos antientrópicos e desenvolver-se no sentido de estados de ordem, diferenciação e organização mais elevados. A característica dos sistemas vivos que os distinguem claramente dos sistemas não vivos é sua propriedade de progredir de estados menos complexos para estados mais complexos. O ser vivo é um sistema longe do equilíbrio, que mantém seu nível local de organização à custa de um maior orçamento global de entropia (idem).
De acordo com PRINGLE (1968), a chave para o significado do que é complexidade – e como ela aumenta – vem de estudos da natureza da informação, ou seja, complexidade pode ser definida como o número de parâmetros necessários para definir um sistema no espaço e tempo.
Ainda que informação possa ser considerada um conceito em vias de construção (MACHADO & CUNHA, 2003) no presente trabalho ela é entendida nos moldes da teoria da informação como a quantidade de incerteza presente em uma mensagem. De acordo com a teoria da informação, a incerteza é tanto maior quanto maior a quantidade de bits de informação necessária para diminuí-la. De acordo com ATLAN (1992) “... a quantidade de informação de um sistema (a função H) é a
2 O construto da complexidade não é normalmente invocado nesta estrutura teórica [sistemas
medida de informação que nos falta, a incerteza sobre esse sistema. E é por isso que ela mede a complexidade” (p. 64).
No que CILLIERS (2000) considerou um “toque de gênio”, Claude Shannon usou a entropia como uma medida do conteúdo da informação de uma mensagem. Ele desenvolveu a teoria matemática da comunicação3 que formou a base da moderna teoria da informação. Substituindo “energia” por “informação” nas equações da termodinâmica ele pôde mostrar que a quantidade de informação em uma mensagem é igual à sua entropia. De acordo com MACHADO e CUNHA (2003)
“... de um modo geral, na teoria matemática da informação, quanto maior a variedade, maior a entropia” (p. 165).
SCHRÖDINGER (1989) afirma que um organismo se mantém vivo no seu estado organizado retirando energia de alta qualidade do meio externo e processando-a para produzir, dentro de si, um estado mais organizado. Mas, a diminuição de entropia mediante a organização do sistema não é exclusiva de organismos vivos, pois isto também acontece com cristais em crescimento. Mas, como distinguir complexidade dentro das organizações? Como evidenciar, por exemplo, que um ser vivo é mais complexo que a estrutura tridimensionalmente arranjada do cristal? Segundo KAUFFMAN (1987) os átomos de cristal estão posicionados em um arranjo regular, que não se modifica com o seu crescimento. Ao se conhecer as posições dos átomos em uma unidade de cristal “mínima”, sabem-se onde os átomos estão no cristal inteiro. Cristais têm estruturas tão regulares que diferentes partes do cristal “dizem“ a mesma coisa, ou seja, um cristal não pode codificar muita informação.
Se a informação fornece um padrão para a medida da organização (CILLIERS, 2000; STONIER, 1996; MILLER, 1968; PRINGLE, 1968) um sistema bem organizado é previsível, de modo que quando ele faz alguma coisa você já sabe o que vai acontecer, por isso se aprende muito pouco com ele, pouca informação é
3 Shannon publicou um artigo chamado “A Mathematical Theory of Communication” em 1948 que foi
adquirida; por outro lado, quanto mais desorganizado e imprevisível é um sistema, mais informação se pode obter ali.
Mas, se a informação é igual à entropia então a mensagem com mais alto conteúdo de informação é completamente aleatória. Obviamente existe alguma tensão entre os conceitos de informação e aleatoriedade. Como CILLIERS (2000) aponta, CHAITIN (1975, 2006) reinterpretou a teoria da informação e a chamou de teoria da informação algorítmica; nela, a aleatoriedade passou a ser definida não mais em termos da imprevisibilidade, mas sim em termos da incompressibilidade. Aleatoriedade tornou-se uma medida para quantidade de informação na seqüência em termos de densidade com a qual a informação está empacotada. Aleatório é o programa mais curto para desempenhar uma tarefa, uma vez que ele não pode ser mais comprimido. Esses programas são aleatórios por definição, independentemente se a seqüência que eles geram é aleatória ou não.
Assim, a complexidade de uma série é igual ao tamanho do programa mínimo necessário para produzir aquela série (CHAITIN, 1975), ou seja, conforme argumenta CILLIERS (2000), complexidade é complexa! Um sistema complexo não pode ser reduzido a um sistema simples, se ele não é simples por definição.
De acordo com CILLIERS (2000), ainda que a noção de complexidade proposta por Chaitin tenha origem nos seus estudos sobre sistemas numéricos formais, ela tem um apelo intuitivo muito frutífero, pois relembra que em se tratando de complexidade não há atalhos sem riscos. CILLIERS (2000) concluiu que uma medida estrita de complexidade não é plausível, factível para descrever um sistema complexo, pois, num certo sentido, se teria que repetir o sistema. A noção nunca deveria ser usada absolutamente. Os sistemas complexos não estão interessados em um “mínimo”. Eles contêm um espaço disponível ou redundância.
a falhar. O resultado é uma estrutura onde uma parte controla a outra. O segundo método incorpora uma redundância de funções. Em lugar de partes isoladas que estão sendo adicionadas ao sistema, funções extras são adicionadas a cada uma das partes, de tal forma que cada parte seja capaz de se engajar em um conjunto de funções, em lugar de somente desempenhar uma atividade especializada. Em qualquer momento as partes possuem capacidades que são redundantes no sentido que não estão sendo usadas imediatamente. De acordo com MORGAN (1996), esse tipo de organização possui flexibilidade e capacidade de reorganização.
Entender a relação entre o conceito de complexidade e a noção de informação como medida de organização exige que não se esqueça a noção de sistemas abertos de não-equilíbrio conforme proposto por BERTALANFFY (1975): estados estacionários permitem a manutenção do sistema, mas, uma vez que eles estão afastados do equilíbrio, perturbações podem levá-los a outros estados (mais ou menos estáveis). O sistema guarda em si certa incerteza e redundância que lhe dá possibilidade para mudança. Na aprendizagem motora, as instruções, a estrutura de
prática, o feedback ou as mudanças nas demandas motora ou cognitiva das tarefas,
entre outros, podem levar o sistema para um novo estado, um que não estava definido a priori em sua estrutura, mas que o sistema utiliza para atingir estados mais complexos, onde novos parâmetros agora fazem parte da definição do sistema. Dessa forma, ao se considerar o processo de aprendizagem como uma organização para atingir uma meta no ambiente, a incerteza é vista como um desafio para o indivíduo: quando ela existe, há potencial para aprendizagem.
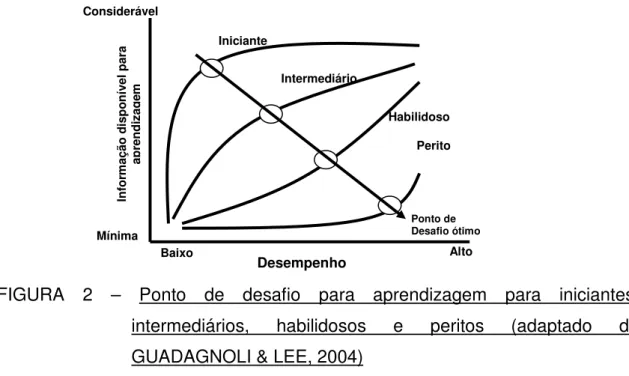
Corroborando essa perspectiva, na área de investigação do comportamento motor, GUADAGNOLI e LEE (2004) afirmam que existem três princípios sobre a informação e a incerteza que devem ser levados em consideração quando se quer estudar o processo de aprendizagem motora: (1) a aprendizagem não pode ocorrer na ausência de informação; (2) a aprendizagem será retardada na presença de muita ou muito pouca informação; (3) para a aprendizagem ocorrer existe uma quantidade ótima de informação que difere em função do nível de habilidade individual e da dificuldade da tarefa a ser aprendida.
nominal da tarefa – quantidade constante de dificuldade independente de quem está desempenhando e sob quais condições a tarefa está sendo desempenhada e ela inclui fatores perceptuais e motores; com o aumento da dificuldade nominal da tarefa a expectativa é que a performance irá diminuir, e a taxa de declínio no desempenho será mais rápida para sujeitos com menor nível de habilidade; essa dificuldade afeta a expectativa de sucesso e, portanto, também a informação potencial proveniente do desempenho: se a expectativa de sucesso é alta, há pouca incerteza e, portanto, pouca informação; se a expectativa de sucesso é moderada, há mais incerteza e mais informação, de forma que tanto para o iniciante como para o perito, tarefas de dificuldade nominal baixa resultam em pouca informação potencial disponível; b) dificuldade funcional da tarefa – refere-se ao quão desafiante a tarefa é com relação ao nível de habilidade do indivíduo e às alterações nas condições da tarefa.
GUADAGNOLI e LEE (2004) propõem um quadro conceitual, denominado Ponto de Desafio (FIGURA 2), cuja finalidade é sugerir como as interações entre certos fatores – demandas ambientais, conhecimento de resultados, nível de habilidade e dificuldade da tarefa – dentro de um único protocolo experimental poderiam ser preditas. Esse quadro mostra a relação entre dificuldade da tarefa e quantidade de informação potencial durante a aprendizagem.
FIGURA 2 – Ponto de desafio para aprendizagem para iniciantes,
intermediários, habilidosos e peritos (adaptado de
GUADAGNOLI & LEE, 2004)
MARTENIUK (1976) parte dos resultados de KAY (1970) de que a velocidade do movimento em um dado nível de dificuldade aumenta com a prática, usando o argumento de que para movimentos bem praticados o monitoramento por feedback ou não é necessário ou é pouco usado, o que diminui o tempo de processamento e consequentemente aumenta a velocidade do movimento. Assim, se o movimento é executado conforme o pretendido, o feedback não carrega mais qualquer informação de valor, no que ela é redundante e isso diminui a carga atencional do limitado sistema de processamento de informação.
De acordo com KAY (1970), em todos os estágios de habilidades motoras nós estamos tentando reduzir o fluxo de informação e isto pode ser visto de duas maneiras: primeiro manipulando a situação de forma que o número de escolhas seja reduzido ou tornar a operação mais lenta de modo que o número de eventos por unidade de tempo é reduzido; esses, de acordo com KAY (1970), são exemplos de redução de informação por mudança nos eventos externos. Mas, por outro lado, um sistema biológico pode seguir um procedimento alternativo de aprendizagem de probabilidades de eventos, avaliando as taxas de ocorrência desses eventos no passado. Assim, KAY (1970) argumenta que existe muita redundância na maioria dos
Baixo Alto
comportamentos habilidosos e que tal redundância relaciona-se estreitamente com a antecipação dos eventos. De acordo com o autor, se o operador humano pode somente responder com atraso ao estímulo, então um modo ótimo de superar essa dificuldade é iniciar a resposta antes do sinal. Isso só é possível quando alguma coisa já é conhecida sobre a situação e ocorrência dos sinais. Tal antecipação pode tomar muitas formas; uma pessoa pode antecipar o próximo estímulo numa seqüência tão bem como se pode antecipar a próxima palavra numa fala. Compreender a linguagem falada somente é possível porque somos conscientes da dependência seqüencial na estrutura da linguagem e o mesmo ocorre na maioria das habilidades humanas.
Redundância, então, pode ser entendida nos termos de medida da informação, conforme proposto por MILLER (1968): quando o número de resultados possíveis de uma escolha é reduzido – pelas restrições contextuais à tarefa – alguma informação está sendo comunicada. Isto quer dizer que, ao reduzir o número de escolhas, o contexto nos dá informação acerca do próximo item. Assim, quando o próximo evento ocorre, algo de informação que ele carrega é idêntico à informação que já foi recebida do contexto. Essa informação repetida é chamada de redundância.
Crianças criam redundância pela repetição (KAY, 1970). Uma vez que só é possível sobreviver conhecendo as contingências dos eventos, a criança inicia controlar o mundo em torno de si pela repetição. De acordo com CONNOLY (1970), à medida que as crianças ficam mais velhas, o desempenho em tarefas de laboratório mostra que uma das principais mudanças no desenvolvimento de habilidade é no sequenciamento temporal das subunidades. A transição entre os componentes se torna mais suave e mais rápida e, em termos da teoria da informação, existe mais redundância.
3.2.1 A informação e a estrutura hierárquica das organizações
De acordo com STONIER (1996), a informação pode ser vista como energia, ou seja, como uma propriedade básica de nosso universo. Operacionalmente, energia é concebida como a capacidade de realizar trabalho e a informação poderia ser definida operacionalmente como a capacidade de gerar organização. Assim, uma vez que toda organização só se torna possível mediante troca de informação, ela precisa ser produzida, transmitida, recebida, processada e transformada em novas formas de informação e comunicada entre diferentes níveis hierárquicos. E é justamente a noção de hierarquia nas organizações que permite entender como se dá o fluxo energético e informacional no sistema.
Quando se fala em hierarquia, talvez a primeira idéia que vem à mente seja a de uma estrutura arranjada em níveis, onde os elementos pertencentes a eles têm papéis bem determinados. Pode-se ainda acrescentar que a noção de hierarquia pressupõe elementos inferiores que são subordinados e obedientes a outros, os quais ocupam níveis superiores. Essa descrição representa a noção de uma organização rígida, onde existe uma ordem predefinida das partes que a compõem. E é essa ordem que permite o controle do sistema de uma parte sobre as outras.
Para SIMON (1973), em sistemas complexos, o termo hierarquia está divorciado de sua denotação original como uma estrutura vertical. Mais do que isso, hierarquia significa um conjunto de Caixas Chinesas, que consiste de uma caixa encapsulando outra que, por sua vez, é encapsulada por outra e assim recursivamente. A recursão é tão longa quanto a paciência do artesão que fez as caixas. Ao abrir uma dada caixa em uma hierarquia, se vê não apenas uma nova caixa dentro, mas um conjunto total de caixas e, abrindo qualquer nova caixa, se vê mais uma vez um novo conjunto delas. Em seu sentido mais simples, ordem hierárquica refere-se a conjuntos que são sucessivamente incorporados, de modo que em uma hierarquia um dado conjunto não deve ser descrito só por si mesmo, mas em termos do que está dentro dele e de onde ele está no conjunto (GROBSTEIN, 1973).
“parte” e “todo”. De acordo com ele, toda forma de organização tem certo grau de coerência e estabilidade, desde a vida associativa dos insetos até a vida militar, as quais são hierarquicamente organizadas por meio de princípios ou leis que se aplicam a todos os níveis e elementos de uma dada hierarquia.
Parte é entendida como uma porção de um conjunto, um segmento incompleto que não existiria sozinho. O todo é algo completo em si mesmo que dispensa qualquer explicação adicional. Mas todos e partes num sentido absoluto não existem em lugar nenhum, seja no domínio dos organismos vivos ou das organizações sociais. Koestler volta-se para a metáfora do deus romano Jano para argumentar que os membros da hierarquia têm características de todos e partes. Jano tem duas faces que olham em direções opostas: uma olha para os níveis subordinados, e é um todo completo em si mesmo; a outra face olha para cima, o que a caracteriza como uma parte de um todo superior. Em suma, o efeito Jano é uma característica fundamental dos subtodos em qualquer tipo de hierarquia.
Koestler preferiu denominar esses subtodos hierarquicamente organizados como hólons. O hólon vem do grego holos (todo), com o sufixo on que, como em próton e nêutron, sugere uma partícula ou parte. As atividades do hólon dependem das interações entre as partes e de sua interação como um todo ao se relacionar com outros hólons. Essas interações não podem ser previstas do nível inferior, assim como as funções do SNC não podem ser previstas das células nervosas individuais. Não se pode reduzir o hólon a uma soma de suas partes, nem prever suas propriedades por conhecermos as propriedades das partes.
O conceito de níveis de organização hierárquicos rejeita o ponto de vista reducionista, segundo o qual fenômenos da vida (inclusive a consciência) podem ser reduzidos a leis físico-químicas e encontram nelas a sua explicação. Um hólon estável tem sua individualidade (perfil) que tende a conservar e afirmar sua estrutura, atuando como uma unidade autônoma, completa em si mesma.
concentrar em decisões mais importantes. De acordo com PATTEE (1973) o sistema de controle é um conjunto de restrições que mantém certos graus de liberdade, e não é completamente rígido. O controle hierárquico tanto limita quanto dá liberdade simultaneamente. Por exemplo, no nível comportamental de análise, as regras sintáticas limitam uma linguagem, mas são pré-requisitos para a livre expressão do pensamento. Num nível sociológico de análise, as restrições legais são necessárias para estabelecer uma sociedade livre. Também, as restrições hierárquicas podem parecer arbitrárias, pois elas são regras que estão incorporadas em uma estrutura, que lhes dá um contexto próprio para acontecer. Mesmo na arte onde não existem restrições químicas ou culturais, o artista deve inventar a sua própria. Qualquer teoria de origem hierárquica deve explicar a origem das restrições que tanto são arbitrárias e efetivas no sentido de dar liberdade ao sistema. Em outras palavras, um resultado importante da organização hierárquica é a maior simplicidade, mas uma simplicidade funcional, como afirma PATTEE (1973) “... a simplificação que resulta das restrições hierárquicas de uma organização deve ser equilibrada pelo quão bem ela funciona” (p. 73).
A polaridade fundamental do hólon é sua tendência auto-afirmativa e sua tendência integrativa. A tendência auto-afirmativa assegura sua condição de todo único, de autonomia e independência do hólon; a tendência integrativa expressa a dependência do todo maior: sua condição de parte. É essa polaridade que capacita o funcionamento normal e ordenado da organização hierárquica, uma vez que cada hólon age de acordo com seu código de regras, sem procurar impô-lo aos outros, nem perder sua individualidade por subordinação excessiva.
interrupções e retrocessos. Em suma, os sistemas só funcionam como tais porque são hierarquicamente organizados, de partes menos complexas para mais complexas e, formas intermediárias instáveis garantirão a passagem de um estado simples para outro, mais complexo; a existência de subconjuntos estáveis, com características auto-afirmativas e integrativas, organizados hierarquicamente capacita a manutenção do sistema (KOESTLER, 1969; MORGAN, 1996; SIMON, 1973). E, mais, pode-se compreender que nesse modo de organização, as linhas de controle se estendem para cima e para baixo não havendo cortes horizontais em uma hierarquia de controle ideal, o que permite a disponibilidade do fluxo informacional e energético ao longo da organização (KOESTLER, 1969).
BERTALANFFY (1975), afirma que é evidente o fato de que a ordem hierárquica se encontra tanto nas estruturas quanto nas funções. PATTEE (1973) afirma que o problema de entender a dualidade estrutura-função está justamente na interface entre estrutura e função e diferencia controle hierárquico de função hierárquica uma vez que “... control implies the constraint or regulation of a total system, whereas function often applies to a specific process that is only a small part of the whole organism” (p. 81).
Voltando-se para estudos e idéias que compõem as teorias clássicas de aprendizagem motora pode-se entender melhor essa noção de ordem hierárquica em estruturas e funções. De acordo com SCHMIDT e LEE (1999), à medida que as pessoas aprendem, ocorrem mudanças de controle motor para níveis progressivamente mais inferiores do Sistema Nervoso Central (SNC). Essa idéia de que o comportamento motor é hierárquico explicita a noção de que um nível superior do sistema é responsável pela tomada de decisão e algum nível inferior é responsável por fazer acontecer essa tomada de decisão. Uma mudança hierárquica no controle do movimento com a prática envolve a maneira como os movimentos são
seqüenciados. KEELE (19764 citado em SCHMIDT & LEE, 1999) sugeriu que vários
elementos são aprendidos de uma maneira progressiva para formar a ação completa. Com a prática, os elementos de uma tarefa que à primeira vista pareciam unidades
isoladas, começam a compor um elemento maior, que pode ser controlado como uma única unidade. Essa visão de controle hierárquico especifica como a estrutura, cresce progressivamente pela adição das partes.
No entanto, a esse respeito, GLENCROSS (1980) afirma que na transferência de controle entre níveis de uma hierarquia, mais do que pensar que níveis superiores precisam e devem controlar os inferiores, deve-se entender a influência de um nível sobre outro e as conseqüentes mudanças no estado e no tempo das operações do sistema, sendo que essas mudanças podem ocorrer independentemente ou em paralelo. GLENCROSS (1980) destaca, por exemplo, que o comportamento antecipatório pode ser visto como um meio de facilitar a organização de um número de níveis, simultaneamente.
No nível de análise comportamental, um exemplo da natureza hierárquica do controle na aprendizagem motora pode ser vista na hipótese da progressão-regressão apresentada por FITTS, BARICK, NOBLE e BRIGGS (1959)5, citada em
SCHMIDT & LEE (1999). De acordo com ela, à medida que se pratica uma tarefa de rastreamento visual, uma progressão desenvolve-se no comportamento do aprendiz em direção a um rastreamento cada vez mais complexo. No início da prática o aprendiz responde à tarefa de rastreamento de um ponto mostrado em uma tela, simplesmente usando a informação de posição do ponto. Com mais prática o aprendiz é capaz de usar a informação de velocidade e mais tarde pode usar a informação de aceleração do ponto sobre a tela. A regressão acontece quando o aprendiz é submetido a estresse ou esquecimento e regride ao nível de controle imediatamente inferior (da aceleração para velocidade, e da velocidade para posição) acompanhado de redução da precisão. Para SCHMIDT e LEE (1999), a hipótese da progressão-regressão permite entender a natureza hierárquica das mudanças no controle do comportamento motor quando os níveis superiores da habilidade são alcançados com prática, e como volta a níveis inferiores quando sofre estresse ou esquecimento.
5 FITTS, P.M.; BARICK, H.P.; NOBLE, M.E. & BRIGGS, G.E. Skilled performance (Contract no. AF41
Ainda no nível comportamental de análise, TANI (1995) mostrou evidências empíricas da organização hierárquica durante a aquisição de habilidades motoras, utilizando uma tarefa de rastreamento de um padrão seriado luminoso. Quando uma perturbação é introduzida num sistema que já formou uma estrutura (estabilização) ele é capaz de se adaptar ao responder a uma perturbação. E se esse sistema guarda em si certa redundância (estado de respostas antecipatórias), ele é capaz de responder à perturbação e adaptar-se ao manter um desempenho adequado, em um nível hierarquicamente inferior (respostas corretas). Assim, ao se pensar em uma organização hierárquica, um determinado evento precisa acontecer para que outros possam sucedê-lo e, em situações exigentes – alta dificuldade funcional –, o sistema é capaz de sacrificar um estado hierárquico, para se manter íntegro.
Até o presente momento neste trabalho, atenção foi dada sobre as características da estrutura complexa e hierárquica de um sistema que se encontra em constante troca de informação e energia com seu meio, como é o caso do comportamento humano envolvido no processo de aprendizagem motora. O foco nas próximas seções e subseções é buscar entender como tal estrutura se modifica.
3.3 Estabilidade, perturbação e instabilidade
De acordo com GRIMM e WISSEL (1997), o termo estabilidade é abrangente e tal abrangência pode causar confusão. Primeiramente dever-se-ia ter em mente qual propriedade de estabilidade se está querendo analisar. Estabilidade pode significar: a) ficar essencialmente imutável, o que corresponde à constância; b) retornar a um estado de referência depois de uma perturbação temporária, o que corresponde à resiliência; e c) manter-se ao longo do tempo em um sistema ecológico, o que corresponde à persistência. De qualquer modo, estabilidade só
pode ser entendida ou definida mediante a perturbação, que de acordo com NICOLIS
e PRIGOGINE (1989) ocorre quando um incidente modifica alguma das propriedades do sistema.
(2003) nenhuma perturbação se encerra em si mesma. Todos os fenômenos naturais contaminam outros elementos e geram outros fenômenos. Mudanças bruscas de clima, de temperatura e da composição da atmosfera foram alguns dos elementos que se colocaram no caminho da vida. Para FORD e LERNER (1992), seres humanos devem ser coerentemente organizados de modo que eles possam funcionar como uma unidade. Perturbações no nível intrapessoal ou interpessoal introduz desorganização porque, como um sistema aberto, a pessoa e seu contexto deve compor uma unidade estrutural-funcional.
Em situações de instabilidade, a vida responde de uma destas duas maneiras: ou desaparece – como efetivamente a maior parte de suas formas desapareceu – ou usa sua estrutura para se adaptar às novas situações que lhe são colocadas. Assim, a efetividade do comportamento humano é o resultado da variabilidade ambiental e o requerimento contínuo de usar e substituir recursos energéticos e informacionais, reconciliar as exigências da ação com velhos hábitos, tão bem como com seus relacionamentos com o ambiente, à medida que são continuamente perturbados (FORD & LERNER, 1992).
Durante muito tempo na história da compreensão de sistemas físicos e biológicos entendia-se que uma propriedade de tais sistemas era se livrar da perturbação e manter a estabilidade, de modo que qualquer nível de variabilidade deveria ser eliminado, o que corresponde à noção de constância como definido por GRIMM e WISSEL (1997). Criado por CANNON (1968) o termo homeostase tentou explicitar a capacidade do ser vivo de manter-se estável perante as perturbações. Vindos da cibernética de primeira ordem (WIENER, 1973), os conceitos de feedback negativo, servomecanismos e eliminação de ruídos, auxiliaram a cristalizar a noção de que os sistemas estão envolvidos na busca de um equilíbrio que tenta manter a estabilidade pela correção do desvio.
KELSO e HAKEN (1997) afirmam que teoria e experimentação convergem na noção de que os sistemas biológicos, incluindo o cérebro, vivem próximos a limites que separam o comportamento regular do irregular, sobrevivendo melhor às margens da instabilidade. Esse seria o motivo para pensar que modelos que incorporam essa propriedade de estar afastado do equilíbrio servem mais adequadamente ao propósito de explicar como o processo de aprendizagem leva o sujeito para um novo estado de comportamento. Mais enfaticamente, PRIGOGINE (1996) afirma que a vida só é possível num universo longe do equilíbrio.
HORGAN (1995) afirma que a noção de complexidade mais amplamente envolve a expressão “a vida no limite do caos”. A idéia básica é que nada novo pode emergir num sistema com alto grau de ordem e estabilidade. De acordo com MENDES (2006) “... as estruturas criadas são tanto mais ricas e diversas quanto mais próximo um sistema estiver de uma transição para um estado de imprevisibilidade” (p. 5).
A origem da noção de um estado de transição entre a ordem e o caos se deve a estudos sobre os autômatos celulares e sobre o regime de comportamento dos sistemas dinâmicos, desenvolvidos separadamente por C. Langton e N. Packard (LEWIN, 1994) em épocas semelhantes. S. Kauffman também teve importante participação na definição dessa noção (LEWIN, 1994).
O estudo de autômatos celulares surgiu na década de 1950 com John von Neuman, matemático húngaro, ao propor que regras simples governam o estado de cada célula (BERTALANFFY, 1975; LEWIN, 1994). Os autômatos progridem através de estados nos quais cada célula examina a atividade de suas vizinhas e reage de acordo com suas regras. Modelos dinâmicos e complexos se desenvolvem segundo as regras sem, no entanto, ser minuciosamente determinados por elas; a estrutura global de um sistema complexo surge a partir de regras locais. Já os estudos sobre os comportamentos de um sistema dinâmico, mostraram que existem três classes desses comportamentos: ponto fixo, periódico e caótico.