Anosov and Circle Diffeomorphisms
Jo˜ao P. Almeida, Albert M. Fisher, Alberto A. Pinto and David A. Rand
Abstract We present an infinite dimensional space of C1+ smooth conjugacy classes of circle diffeomorphisms that areC1+fixed points of renormalization. We
exhibit a one-to-one correspondence between theseC1+fixed points of
renormaliz-ation andC1+conjugacy classes of Anosov diffeomorphisms.
2.1 Introduction
The link between Anosov diffeomorphisms and diffeomorphisms of the circle is due to D. Sullivan and E. Ghys through the observation that the holonomies of Anosov diffeomorphisms give rise toC1+circle diffeomorphisms that areC1+fixed points of renormalization (see also [1]). A. Pinto and D. Rand [21] proved that this observation gives an one-to-one correspondence between the corresponding smooth
Jo˜ao P. Almeida
LIAAD-INESC Porto LA; Departamento de Matem´atica, Escola Suoerior de Tecnologia e de Gest˜ao, Instituto Polit´ecnico de Baganc¸a. Campus de Santa Apol´onia, Ap. 1134, 5301-857 Braganc¸a, Portugal.
e-mail: [email protected]
Albert M. Fisher
Departamento de Matem´atica, IME-USP, Caixa Postal 66281, CEP 05315-970 S˜ao Paulo, Brasil. e-mail: [email protected]
Alberto A. Pinto
LIAAD-INESC Porto LA; Departamento de Matem´atica, Faculdade de Ciˆencias da Universidade do Porto, Rua do Campo Alegre, 687, 4169-007, Portugal; Departamento de Matem´atica e Centro de Matem´atica da Universidade do Minho, Campus de Gualtar, 4710-057 Braga, Portugal. e-mail: [email protected]
D. A. Rand
Warwick Systems Biology & Mathematics Institute, University of Warwick, Coventry CV4 7AL, United Kingdom.
e-mail: [email protected]
conjugacy classes. A key object in this link is the smooth horocycle equipped with a hyperbolic Markov map.
2.2 Circle Difeomorphisms
Fix a natural numbera∈◆and let❙be acounterclockwise oriented circle homeo-morphic to the circle ❙1=❘/(1+γ)❩, where γ = (−a+√a2+4)/2=1/(a+ 1/(a+···)). We note that if a=1 then γ is the inverse of the golden number (1+√5)/2. A key feature ofγis that it satisfies the relationaγ+γ2=1.
Anarc in❙is the image of a non trivial intervalI in❘by a homeomorphism α:I→❙. IfIis closed (resp. open) we say thatα(I)is aclosed(resp.open)arcin ❙. We denote by(a,b)(resp.[a,b]) the positively oriented open (resp. closed) arc in ❙starting at the pointa∈❙and ending at the pointb∈❙. AC1+atlasA of❙is
a set of charts such that (i) every small arc of❙is contained in the domain of some chart inA, and (ii) the overlap maps areC1+α compatible, for someα>0.
AC1+ circle diffeomorphismis a triple (g,❙,A)whereg:❙→❙ is aC1+α
diffeomorphism, with respect to theC1+α atlasA, for someα>0, andgis
quasi-symmetric conjugate to the rigid rotationrγ:❙1→❙1, with rotation number equal
toγ/(1+γ). We denote byF the set of allC1+circle diffeomorphisms(g,❙,A),
with respect to aC1+atlasA in❙.
In order to simplify the notation, we will denote theC1+circle diffeomorphism (g,❙,A)only byg.
2.2.1 The Horocycle and Renormalization
x
0
g2(0) g(0)
S
g3(0)
pg
H
S0
S2
S1
~
= S3
SH
2 SH
1 SH
0USH3
pg(0)
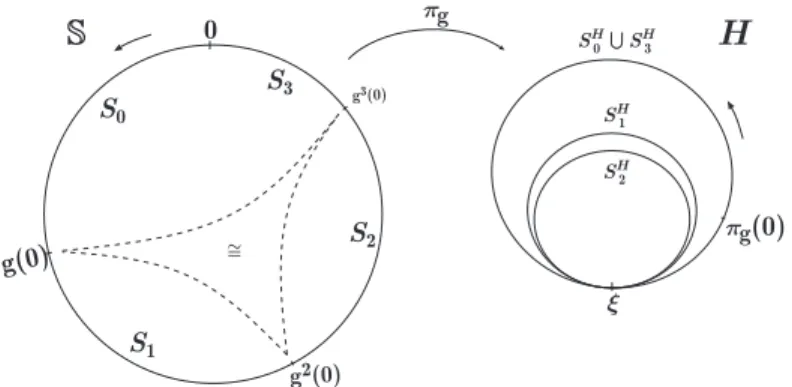
Fig. 2.1 The horocycleH for the casea=2. The junctionξ of the horocycle is equal toξ =
Let us mark a point in ❙ that we will denote by 0∈❙, from now on. Let
S0 = [0,g(0)] be the oriented closed arc in ❙, with endpoints 0 and g(0). For k=0, . . . ,alet Sk=
gk(0),gk+1(0)
be the oriented closed arc in❙, with endpoints gk(0)andgk+1(0)and such that Sk∩Sk−1={gk(0)}. Let Sa+1=ga+1(0),0 be the oriented closed arc in❙, with endpointsga+1(0)and 0. We introduce an equi-valence relation∼in❙by identifying thea+1 pointsg(0), . . . ,ga+1(0)and form the oriented topological spaceH(❙,g) =❙/∼. We call this oriented topological space thehorocycle(see Figure 2.1) and we denote it byH=H(❙,g). We consider the quotient topology inH. Let πg:❙→H be the natural projection. The point
ξ =πg(g(0)) =···=πg(ga+1(0))∈H is called thejunctionof the horocycleH.
Fork=0, . . . ,a+1, letSH
k =SHk(❙,g)⊂Hbe the projection byπgof the closed arc
Sk. AparametrizationinHis the image of a non trivial intervalIin❘by a
homeo-morphismα:I→H. IfIis closed (resp. open) we say thatα(I)is aclosed(resp. open)arcinH. AchartinHis the inverse of a parametrization. Atopological atlas
Bon the horocycleHis a set of charts{(j,J)}, on the horocycle, with the property
that every small arc is contained in the domain of a chart inB, i.e. for any open
arcKinHand anyx∈Kthere exists a chart{(j,J)} ∈Bsuch thatJ∩Kis a non
trivial open arc inHandx∈J∩K. AC1+atlasBin H is a topological atlasB
such that the overlap maps areC1+αand haveC1+α uniformly bounded norms, for someα>0.
x 0
g2(0) g(0)
S
g3(0) pg
H
S0
S2
S1
~
=
S3
SH
2 SH
1
j : J a R i : I a R
0 R
J 1 L
pg(J 1 L )
c
pg(J3R )
pg(d)
J3R
SH
0USH3
d
pg(0) pg(c)
LetA be aC1+atlas in❙for whichgisC1+. We are going to construct aC1+
atlasAH in the horocycle that is theextended pushforwardAH= (π
g)∗A of the
atlasA in❙.
Ifx∈H\{ξ}then there exists a sufficiently small open arcJinH, containingx, such thatπ−1
g (J)is contained in the domain of some chart(I,i)inA. In this case,
we define (J,i◦π−1
g )as a chart in AH. Ifx=ξ andJis a small arc containing
ξ, then either (i) π−1
g (J) is an arc in❙ or (ii) πg−1(J)is a disconnected set that
consists of a union of two connected components. In case (i),π−1
g (J)is connected
and we define J,i◦π−1
g
as a chart inAH. In case (ii),π−1
g (J)is a disconnected
set that is the union of two connected arcsJkLandJlRof the formJlR= [gl(0),d)and
JkL= (c,gk(0)], respectively, for somek,l∈ {0, . . . ,a+1}withk6=l(see Figure 2.2).
Let(I,i)∈A be a chart such thatI⊃(c,d). We define j:J→❘as follows,
j(x) =
i◦π−1
g (x), ifx∈πg([gl(0),d))
i◦gl−k◦π−1
g (x),ifx∈πg((c,gk(0)]) .
We call the atlas determined by these charts, theextended pushforward atlas ofA
and, by abuse of notation, we will denote it byAH= (π g)∗A.
Letg= (g,❙,A)be aC1+circle diffeomorphism with respect to aC1+atlasA
in❙. LetR❙=SH0∪SHa+1be projection byπgof the oriented close arcS0∪Sa+1of❙. LetiR❙:S0∪Sa+1⊂❙→R❙be the natural inclusion and letRA be the restriction,
A|R❙, of theC1+atlasA toR❙. Therenormalization of g= (g,❙,A)is the triple
(Rg,R❙,RA), whereRg:R❙→R❙is the map given by (see Figure 2.3),
iR❙◦ga+1=Rg◦iR❙, f or Rg|iR❙(S0), iR❙◦g=Rg◦iR❙, f or Rg|iR❙(Sa+1)
For simplicity of notation, we will denote the renormalization of aC1+circle diffeomorphismg,(Rg,R❙,RA), only byRg.
We recall thatF denotes the set of allC1+circle diffeomorphisms(g,❙,A)with
respect to aC1+atlasA in❙.
Lemma 2.1.The renormalization Rg of a C1+circle diffeomorphism g∈F is a C1+
circle diffeomorphism, i.e. the map R:F→F given by R(g) =Rg is well defined. In particular, the renormalization Rrγof the rigid rotation is the rigid rotation rγ.
The proof of Lemma 2.1 is in [21].
The marked point 0∈❙determines a marked point 0 in the circleR❙. SinceRg is homeomorphic to a rigid rotation, there existsh:❙→R❙, withh(0) =0, such thathconjugatesgandRg.
Definition 2.1.Ifh:❙→R❙isC1+, we callgaC1+fixed point of renormalization. We will denote byRthe set of allC1+circle diffeomorphismsg∈F that areC1+
fixed points of renormalization.
We note that the rigid rotationrγ, with respect to the atlasAiso, is an affine fixed
0
g2(0) g(0)
S
g3(0)
pg S0
S2
S1
~
= S3
x
SH
2 SH
1
pg(0)
SH
0USH3 RS=
x
SH
2 SH
1
pg(0)
SH
0USH3 RS= pg
g
pg(g4(0)) g4(0)
Rg|iRS(S0)
Rg|iRS(Sa+1)
Fig. 2.3 The renormalizationRg= (Rg,R❙,RA)of aC1+circle diffeomophismg= (g,❙,A).
2.2.2 Markov Maps
Letg= (g,❙,A)be aC1+circle diffeomorphism, with respect to aC1+atlasA,
andRg= (Rg,R❙,RA)its renormalization. LetH=H(❙,g)andRH=H(R❙,Rg)
be the horocycles determined by theC1+circle diffeomorphismsgandRg,
respect-ively. LetAH andARH be the atlas in the horocyclesH andRH, that are the
ex-tended pushforwards of the atlasesA andRA, respectively. LetiH:❙→Hbe the
natural inclusion.
Leth:❙→R❙be the homeomorphism that conjugates g andRgsending the marked point 0 ofgin the marked point 0 ofRg.
Definition 2.2.TheMarkov map Mgassociated to g∈F is the mapMg:H→H
defined by
Mg(x) =
iH◦h−1◦iRS◦iH−1(x),i f x∈iH(S0∪Sa+1)
iH◦h−1◦iRS◦g−k◦iH−1(x),i f x∈iH(Sk),k=1, . . . ,a
.
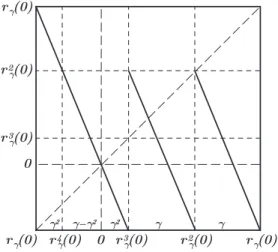
We observe that, in particular, the rigid Markov map Mrγ is an affine map with
respect to the atlasAH
rep-resented in Figure 2.4. We observe that the identification inH ofg(0)withg2(0) makes the Markov mapMga local homeomorphism.
0 0
rg (0) r3
g (0)
g-g2 g2 g g r2
g (0) rg (0)
rg (0)
r2
g (0)
r3
g (0)
r4
g (0)
g2
Fig. 2.4 The Markov mapMrγ with respect to the atlasA
H iso.
Lemma 2.2.Let g∈F. The Markov map Mgassociated to g is a C1+local
diffeo-morphism with respect to the atlasAH= (π
g)∗A if, and only if, the diffeomorphism
g is a fixed point of renormalization.
The proof of Lemma 2.2 is in [21].
2.3 Anosov Diffeomorphisms
Fix a positive integer a∈◆and consider theAnosov automorphism Ga: ❚→❚
given byGa(x,y) = (ax+y,x), where❚is equal to❘2/(v❩×w❩)withv= (γ,1)
andw= (−1,γ). Letπ: ❘2→❚be the natural projection. LetA
0andB0be the rectangles[0,1]×[0,1]and[−γ,0]×[0,γ]respectively. A Markov partitionMG
aof
Gais given byA=π(A0)andB=π(B0)(see Figure 2.5). The unstable manifolds of
Gaare the projection byπof the vertical lines in the plane, and the stable manifolds
ofGaare the projection byπof the horizontal lines in the plane.
AC1+Anosov diffeomorphism G:❚→❚is aC1+αdiffeomorphism, withα>0, such that (i)Gis topologically conjugate toGa; (ii) the tangent bundle has aC1+α
uniformly hyperbolic splitting into a stable direction and an unstable direction (see [39]). We denote by G the set of all suchC1+ Anosov diffeomorphisms with an
p(0,0)
A
g2
G2(A)
g
w
v
B
g B
g2
G2(B)
A
Fig. 2.5 The Anosov automorphismG2:❚→❚.
If h is the topological conjugacy betweenGa andG, then a Markov partition
MG of Gis given byh(A)andh(B). Letd =dρ be the distance on the torus❚,
determined by a Riemannian metric ρ. We define the mapGι =G if ι =u, or
Gι=G−1ifι=s. Forι∈ {s,u}andx∈❚, we denote the localι-manifolds through
xby
Wι(x,ε) =
y∈❚:d(G−ιn(x),Gι−n(y))≤ε,for alln≥0 .
By the Stable Manifold Theorem (see [39]), these sets are respectively contained in the stable and unstable immersed manifolds
Wι(x) = [
n≥0
Gnι Wι G−ιn(x),ε0
which are the image ofC1+α immersionsκι,x:❘→❚, for some 0<α ≤1 and
some smallε0>0. Anopen(resp.closed)ι-leaf segment Iis defined as a subset of Wι(x)of the formκι,x(I1)whereI1is an open (resp. closed) subinterval (non-empty) in❘. Anι-leaf segmentis either an open or closedι-leaf segment. The endpoints of anι-leaf segmentI=κι,x(I1)are the pointsκι,x(u)andκι,x(v)whereuandv
2.3.1 Spanning Leaf Segments
One can find a small enoughε0>0, such that for every 0<ε<ε0there isδ = δ(ε)>0 with the property that, for all pointsw,z∈❚withd(w,z)<δ,Wu(w,ε)
andWs(z,ε)intersect in a unique point that we denote by
[w,z] =Wu(w,ε)∩Ws(z,ε).
Arectangle Ris a subset of❚which is (i) closed under the bracket, i.e.x,y∈R⇒ [x,y]∈R, and (ii) proper, i.e. it is the closure of its interior in❚. Ifℓuandℓs are
respectively unstable and stable closed leaf segments intersecting in a single point then we denote by[ℓu, ℓs]the set consisting of all points of the form[w,z]withw∈ℓu
andz∈ℓs. We note that[ℓu, ℓs]is a rectangle. Conversely, given a rectangleR, for
eachx∈Rthere are closed unstable and stable leaf segments of❚,ℓu(x,R)⊂Wu(x)
andℓs(x,R)⊂Ws(x)such thatR= [ℓu(x,R), ℓs(x,R)]. The leaf segmentsℓu(x,R)
andℓs(x,R)are called, respectively,unstableandstable spanning leaf segments.
R
x z
l
s(z,R)l
s(x,R)q(w)=[w,z] w
l
u(x,R)l
u(w,R)Fig. 2.6 A basic stable holonomyθ:ℓu(x,R)→ℓu(z,R).
2.3.2 Basic Holonomies
Suppose thatxandzare two points inside any rectangleRof ❚. Letℓs(x,R)and
ℓs(z,R)be two stable spanning leaf segments ofRcontaining, respectively,xand
z. We define the mapθ:ℓs(x,R)→ℓs(z,R)byθ(w) = [w,z](see Figure 2.6). Such
2.3.3 Lamination Atlas
Thestable lamination atlasLs=Ls(G,ρ), determined by a Riemannian metric
ρ, is the set of all mapse:I→❘, where eis an isometry between the induced Riemannian metric on the stable leaf segmentI and the Euclidean metric on the reals. We call the mapse∈Lsthestable lamination charts. Similarly, we can define
theunstable lamination atlasLu=Lu(G,ρ). By Theorem 2.1 in [27], the basic
unstable and stable holonomies areC1+with respect to the lamination atlasLs.
2.3.4 Circle Diffeomorphisms
LetG∈G be aC1+Anosov diffeomorphism with an invariant measure absolutely
continuous with respect to the Lebesgue measure and topologically conjugate to the Anosov automorphismGa by the homeomorphismh. For each Markov rectangle
R, lettRs be the set of all unstable spanning leaf segments ofR. Thus, by the local product structure, one can identifyts
Rwith any stable spanning leaf segmentℓs(x,R)
ofR. We form the space❙Gby taking the disjoint unionths(A)Fths(B), whereh(A)
andh(B)are the Markov rectangles of the Markov partitionMG, and identifying
two pointsI∈tRs andJ∈tRs′ if (i)R6=R′, (ii) the unstable leaf segmentsIandJare unstable boundaries of Markov rectangles, and (iii) int(I∩J)6=/0. Topologically, the space❙Gis acounterclockwise oriented circle. Letπ❙G:
F
R∈MGR→❙Gbe the
natural projection sendingx∈Rto the pointℓu(x,R)in❙ G.
LetI❙ be an arc of❙G andI a leaf segment such thatπ❙G(I) =I❙. The chart
i:I→❘inL =Ls(G,ρ)determines acircle chart i
❙:I❙→❘forI❙ given by i❙◦π❙G =i. We denote byAG=A(G,ρ)the set of all circle chartsi❙determined
by chartsiinL =Ls(G,ρ). Given any circle chartsi
❙:I❙→❘and j❙:J❙→❘, the overlap map j❙◦i−❙1:i❙(I❙∩J❙)→ j❙(I❙∩J❙)is equal to j❙◦i❙−1=j◦θ◦i−1, wherei=i❙◦π❙G:I→❘and j= j❙◦π❙G:J→❘are charts inL, and
θ:i−1(i❙(I❙∩J❙))→ j−1(j❙(I❙∩J❙))
is a basic stable holonomy. By Theorem 2.1 in [27], there existsα>0 such that, for all circle chartsi❙ and j❙ inAG, the overlap maps j❙◦i−1
❙ = j◦θ◦i−1areC1+α diffeomorphisms with a uniform bound in theC1+α norm. Hence,AG=A(G,ρ)
is aC1+atlas.
Suppose thatIandJare stable leaf segments andθ:I→Jis a holonomy map such that, for everyx∈I, the unstable leaf segments with endpointsxandθ(x)cross once, and only once, a stable boundary of a Markov rectangle. We define thearc ro-tation mapθ˜G:π❙G(I)→π❙G(J), associated toθ, by ˜θG(π❙G(x)) =π❙G(θ(x))(see
Figure 2.7). By Theorem 2.1 in [27] there exists α >0 such that the holonomy θ :I→J is a C1+α diffeomorphism, with respect to the C1+ lamination atlas
Ls(G,ρ). Hence, the arc rotation maps ˜θ
GareC1+diffeomorphisms, with respect
p(0,0)
A
B B
A
0S
i0
gG
gG(x) j0=q(i0)
i2
j2=q(i2)
x
q(x)
J
I
l0
i1
j1=q(i1)
gG gG
l(i0)=gG(l0)
l(q(x))=gG(l(x))
l(q(i1))=gG(l(i1))
Fig. 2.7 The arc rotation mapgG=θ˜G:π❙G(I)→π❙G(J). We note that❙=π❙G(I) =π❙G(J)and
ℓ(x) =π❙G(x)is the unstable spanning leaf segment containingx.
Lemma 2.3.There is a well-defined C1+circle diffeomorphism gG, with respect to
the C1+atlasAG=A(G,ρ), such that gG|π❙
G(I) =θ˜G, for every arc rotation map
˜
θG. In particular, if Gais the Anosov automorphism, then gGa is the rigid rotation
rγ, with respect to the isometric atlasAiso=A(Ga,E), where E corresponds to the
Euclidean metric in the plane.
The proof of Lemma 2.3 is in [21].
2.3.5 Train-Tracks and Markov Maps
Roughly speaking, train-tracks are the optimal leaf-quotient spaces on which the stable and unstable Markov maps induced by the action ofGon leaf segments are local homeomorphisms.
LetG∈G be aC1+Anosov diffeomorphism. Lethbe the homeomorphism that conjugatesGwithGa. We recall that, for each Markov rectangleR,tRs denotes the
set of all unstable spanning leaf segments ofRand, by the local product structure, one can identifytRs with any stable spanning leaf segmentℓs(x,R)ofR. We form
Markov rectangles of the Markov partitionMGand identifying two pointsI∈ts Rand
J∈tRs′ if (i) the unstable leaf segmentsIandJare unstable boundaries of Markov
rectangles and (ii)int(I∩J) =/0. This space is called thestable train-trackand it is denoted byTG.
LetπTG :
F
R∈MGR→TG be the natural projection sending the pointx∈Rto
the point ℓu(x,R)inT
G. A topologically regular point I inTG is a point with a
unique preimage underπTG(i.e. the preimage ofIis not a union of distinct unstable
boundaries of Markov rectangles). If a point has more than one preimage byπTG,
then we call it ajunction. Hence, there is only one junction.
A charti:I→❘inL =Ls(G,ρ)determines atrain-track chart i
T:IT→❘for
IT given byiT◦πTG=i. We denote byA
TG=ATG(G,ρ)the set of all train-track
chartsiT determined by chartsiinL =Ls(G,ρ). Given any train-track chartsiT:
IT→❘andjT:JT→❘inATG, the overlap map jT◦iT−1:iT(IT∩JT)→jT(IT∩JT)
is equal to jT◦i−T1=j◦θ◦i−1, wherei=iT◦πTG:I→❘andj=jT◦πTG:J→❘
are charts inL, and
θ:i−1(iT(IT∩JT))→ j−1(jT(IT∩JT))
is a basic stable holonomy. By Theorem 2.1 in [27] there existsα>0 such that, for all train-track chartsiT and jT inATG(G,ρ), the overlap maps jT◦i−T1= j◦θ◦
i−1haveC1+α diffeomorphic extensions with a uniform bound in theC1+α norm. Hence,ATG(G,ρ)is aC1+αatlas inT
G.
The(stable) Markov map MG:TG→TGis the mapping induced by the action
of Gon unstable spanning leaf segments, that it is defined as follows: ifI∈TG,
MG(I) =πTG(G(I))is the unstable spanning leaf segment containing G(I). This
map MG is a local homeomorphism because Gsends short stable leaf segments
homeomorphically onto short stable leaf segments.
Astable leaf primary cylinder of a Markov rectangle Ris a stable spanning leaf segment ofR. Forn≥1, astable leaf n-cylinder of Ris a stable leaf segmentIsuch that (i)GnI is a stable leaf primary cylinder of a Markov rectangleR′(I)∈MG;
(ii)Gn(ℓu(x,R))⊂R′(I)for everyx∈I, whereℓu(x,R)is an unstable spanning leaf
segment ofR.
Forn≥1, an n-cylinder is the projection intoTG of a stable leafn-cylinder
segment. Thus, each Markov rectangle in❚projects in a unique primary stable leaf segment inTG.
Given a topological chart(e,U)on the train-trackTGand a train-track segment
C⊂U, we denote by|C|ethe length ofe(C). We say thatMGhasbounded geometry
in aC1+atlasA, if there isκ1>0 such that, for everyn-cylinderC1andn-cylinder
C2with a common endpoint withC1, we haveκ1−1<|C1|e/|C2|e<κ1, where the
lengths are measured in any chart(e,U)of the atlas such thatC1∪C2⊂U. We note thatMGhas bounded geometry, with respect to aC1+atlasA, if, and only if, there
are κ2>0 and 0<ν<1 such that|C|e≤κ2νn, for everyn-cylinder and every
e∈B.
By Section 4.3 in Pinto-Rand [25], we obtain thatMGisC1+and hasbounded
geometryinATG(G,ρ). In [21] it is proved thatM
Definition 2.2. Hence,gGis a fixed point of renormalization. Futhermore, in [21] it
is proved that the mapG→gGinduces an one-to-one correspondence betweenC1+
conjugacy classes of Anosov diffeomorphisms with an invariant measure absolutely continuous with respect to the Lebesgue measure and C1+ conjugacy classes of
circle diffeomorphisms that are fixed points of renormalization.
We recall that G denotes the set of C1+ Anosov diffeomorphisms Gthat are topologically conjugate to the linear Anosov automorphismGaand have an invariant
measure absolutely continuous with respect to the Lebesgue measure.
Theorem 2.1.For every G∈G, the C1+circle diffeomorphism g
Gis a C1+fixed
point of renormalization, with respect to the C1+atlasA
G=A(G,ρ).
The proof of Theorem 2.1 is in [21].
Acknowledgments
Previous versions of this work were presented in the International Congresses of Mathematicians ICM 2006 and 2010, EURO 2010, ICDEA 2009 and in the celebra-tion of David Rand’s 60th birthday, achievements and influence, University of War-wick. We are grateful to Dennis Sullivan and Fl´avio Ferreira for a number of very fruitful and useful discussions on this work and for their friendship and encour-agement. We thank LIAAD-INESC Porto LA, Calouste Gulbenkian Foundation, PRODYN-ESF, POCTI and POSI by FCT and Minist´erio da Ciˆencia e da Tecnolo-gia, and the FCT Pluriannual Funding Program of the LIAAD-INESC Porto LA and of the Research Centre of Mathematics of University of Minho, for their financial support. A. Fisher would like to thank FAPESP, the CNPQ and the CNRS for their financial support.
References
1. Cawley, E.: The Teichm¨uller space of an Anosov diffeomorphism ofT2. Inventiones Math-ematicae,112, 351–376 (1993).
2. Coullet, P. and Tresser, C.: It´eration d’endomorphismes et groupe de renormalisation.J. de Physique, C5 25 (1978).
3. de Faria, E., de Melo, W. and Pinto, A. A.: Global hyperbolicity of renormalization forCr
unimodal mappings.Annals of Mathematics, 164 731-824 (2006).
4. Feigenbaum, M.: Quantitative universality for a class of nonlinear transformations.J. Stat. Phys., 19 25-52 (1978).
5. Feigenbaum, M.: The universal metric properties of nonlinear transformations.J. Stat. Phys., 21 669-706 (1979).
8. Franks, J.: Anosov diffeomorphisms. In: Smale, S. (ed) Global Analysis.14AMS Providence, 61–93 (1970).
9. Ghys, E.: Rigidit´e diff´erentiable des groupes Fuchsiens. Publ. IHES78, 163–185 (1993). 10. Jiang, Y., Metric invariants in dynamical systems.Journal of Dynamics and Differentiable
Equations, 17 1 5171 (2005).
11. Lanford, O., Renormalization group methods for critical circle mappings with general rota-tion number. VIIIth Internarota-tional Congress on Mathematical Physics.World Sci. Publishing, Singapore, 532-536 (1987).
12. de la Llave, R.: Invariants for Smooth conjugacy of hyperbolic dynamical systems II. Com-mun. Math. Phys.,1093, 369–378 (1987).
13. Manning, A.: There are no new Anosov diffeomorphisms on tori. Amer. J. Math.,96, 422 (1974).
14. Marco, J.M., Moriyon, R.: Invariants for Smooth conjugacy of hyperbolic dynamical systems I. Commun. Math. Phys.,109, 681–689 (1987).
15. Marco, J.M., Moriyon, R.: Invariants for Smooth conjugacy of hyperbolic dynamical systems III. Commun. Math. Phys.,112, 317–333 (1987).
16. de Melo, W.: Review of the bookFine structure of hyperbolic diffeomorphisms, by A. A. Pinto, D. Rand, and F. Ferreira, Springer Monographs in Mathematics.Bulletin of the AMS, S 0273-0979 01284-2 (2010).
17. de Melo, W. and Pinto, A.: Rigidity ofC2infinitely renormalization for unimodal maps.
Communications of Mathematical Physics, 208 91-105 (1999).
18. Penner, R. C. and Harer, J. L.:Combinatorics of Train-Tracks. Princeton University Press, Princeton, New Jersey (1992).
19. Pinto, A. A.: Hyperbolic and minimal sets,Proceedings of the 12th International Conference on Difference Equations and Applications, Lisbon, World Scientific, 1-29 (2007).
20. Pinto, A. A., Almeida, J. P. and Portela, A.: Golden tilings, Transactions of the AMS (to appear).
21. Pinto, A. A. and Rand, D. A.: Renormalisation gives all surface Anosov diffeomorphisms with a smooth invariant measure (submitted).
22. Pinto, A. A. and Rand, D. A.: Train tracks withC1+Self-renormalisable structures.Journal
of Difference Equations and Applications(to appear).
23. Pinto, A. A. and Rand, D. A.: Train-tracks withC1+self-renormalisable structures.Journal of Difference Equations and Applications, 1-18 (2009).
24. Pinto, A. A. and Rand, D. A.: Solenoid functions for hyperbolic sets on surfaces. Dynamics, Ergodic Theory and Geometry, Boris Hasselblat (ed.),MSRI Publications, 54 145-178 (2007). 25. Pinto, A. A. and Rand, D. A.: Geometric measures for hyperbolic sets on surfaces.Stony
Brook preprint, 1-59 (2006).
26. Pinto, A. A. and Rand, D. A.: Rigidity of hyperbolic sets on surfaces.J. London Math. Soc., 71 2 481-502 (2004).
27. Pinto, A. A. and Rand, D. A.: Smoothness of holonomies for codimension 1 hyperbolic dy-namics.Bull. London Math. Soc., 34 341-352 (2002).
28. Pinto, A. A. and Rand, D. A.: Teichm¨uller spaces and HR structures for hyperbolic surface dynamics.Ergod. Th. Dynam. Sys, 22 1905-1931 (2002).
29. Pinto, A. A. and Rand, D. A.: Existence, uniqueness and ratio decomposition for Gibbs states via duality. Ergod.Th.&Dynam. Sys.21 533-543 (2001).
30. Pinto, A. A. and Rand, D. A.: ClassifyingC1+structures on dynamical fractals, 1. The moduli
space of solenoid functions for Markov maps on train tracks. Ergod.Th.&Dynam. Sys., 15 697-734 (1995).
31. Pinto, A. A. and Rand, D. A.: ClassifyingC1+structures on dynamical fractals, 2. Embedded
trees. Ergod.Th.&Dynam. Sys.15 969-992 (1995).
32. Pinto, A. A., Rand, D. A. and Ferreira, F.:C1+self-renormalizable structures.
Communic-ations of the Laufen Colloquium on Science 2007. A. Ruffing, A. Suhrer, (eds.):J. Suhrer, 1-17 (2007).
34. Pinto, A. A. Rand, D. A., Ferreira, F.:Fine structures of hyperbolic diffeomorphisms. Springer Monograph in Mathematics, Springer (2009).
35. Pinto, A. A., Rand, D. A. and Ferreira, F.: Hausdorff dimension bounds for smoothness of holonomies for codimension 1 hyperbolic dynamics.J. Differential Equations, 243 168-178 (2007).
36. Pinto, A. A., Rand, D. A. and Ferreira, F., Cantor exchange systems and renormalization.J. Differential Equations, 243 593-616 (2007).
37. Pinto, A. A. and Sullivan, D.: The circle and the solenoid. Dedicated to Anatole Katok On the Occasion of his 60th Birthday.DCDS A, 16 2 463-504 (2006).
38. Rand, D. A.: Global phase space universality, smooth conjugacies and renormalisation, 1. The
C1+αcase. Nonlinearity, 1 181-202 (1988).
39. Schub, M.:Global Stability of Dynamical Systems. Springer-Verlag, (1987).
40. Thurston, W.: On the geometry and dynamics of diffeomorphisms of surfaces.Bull. Amer. Math. Soc., 19 417-431 (1988).
41. Veech, W.: Gauss measures for transformations on the space of interval exchange maps.The Annals of Mathematics, 2nd Ser.115 2 201-242 (1982).