Técnica de Controle Adaptativo Robusto
Aplicada a Filtros Ativos de Potência em
Paralelo
Érico Cadineli Braz
Orientador: Prof. Dr. Ricardo Lúcio de Araújo Ribeiro
Dissertação de Mestrado apresentada ao Programa de Pós-Graduação em Engenharia Elétrica e de Computação da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Mestre em Ciências.
Aplicada a Filtros Ativos de Potência em
Paralelo
Érico Cadineli Braz
Dissertação de Mestrado aprovada em 26 de março de 2010 pela banca examinadora composta pelos seguintes membros:
Prof. Dr. Ricardo Lúcio de Araújo Ribeiro (orientador) . . . DEE/UFRN
Prof. Dr. Isaac Soares de Freitas . . . DEE/UFCG
Prof. Dr. Allan de Medeiros Martins . . . DEE/UFRN
A Deus pelo dom da vida e por mais esta conquista.
Ao Professor Ricardo Lúcio de Araújo Ribeiro, pelos ensinamentos e orientações acadêmica. Aos professores do DEE, em especial, Aldayr Dantas de Araújo, Allan de Medeiros Mar-tins e José Alberto Nicolau, pelos conhecimentos transmitidos e colaboração durante todo trabalho de pesquisa.
A todos os meus familiares e amigos, que me incentivaram e me apoiaram nessa etapa de minha vida. Aos meus amigos Kurios, Marcus e Tulio que acompanharam e me apoiaram. A meu grande amigo Samaherni, que sempre me incentivou e me ajudou sempre que precisei.
Aos amigos do LACI que me ajudaram sempre que precisei. A todos os professores do PPGEEC que me transmitiram seus conhecimentos e experiências profissionais durante este período.
Os métodos para compensação de correntes e tensões harmônicas vêm sendo bastante utilizados, visto que esses métodos permitem reduzir a níveis aceitáveis as distorções har-mônicas nas tensões ou correntes em um sistema elétrico de potência, e ainda, compensar reativos. A redução de harmônicas e reativos contribuem para: a diminuição das perdas nas linhas de transmissão e nas máquinas elétricas, o aumento do fator de potência e a redução de ocorrências de sobretensões e sobrecorrentes. O filtro ativo de potência é o método mais eficiente para compensação de correntes e tensões harmônicas. No filtro ativo de potência é necessária a utilização de controladores para as malhas de corrente e tensão. Convencionalmente, o controle dessas malhas tem sido feito por controladores proporcionais integrativos.
Neste trabalho, é investigado o uso de uma técnica de controle adaptativo robusto nas malha de corrente e tensão, do filtro ativo de potência em paralelo trifásico, para aumentar a robustez e melhorar o desempenho desse filtro ativo na compensação de harmônicos. A técnica de controle proposta é baseada na combinação das técnicas de controle adaptativo por posicionamento de pólos e de estrutura variável. As vantagens do método proposto so-bre os convencionais são: menor taxa de distorção harmônica, maior flexibilidade, capaci-dade de adaptação e robustez para o sistema. Além disso, a técnica de controle proposta aumenta o desempenho e melhora o transitório do filtro ativo. A validação da técnica proposta foi verificada inicialmente através de um programa de simulação implementado em linguagemC+ + e em seguida foram obtidos resultados experimentais usando um protótipo de um filtro ativo trifásico de 1 kVA.
The Methods for compensation of harmonic currents and voltages have been widely used since these methods allow to reduce to acceptable levels the harmonic distortion in the voltages or currents in a power system, and also compensate reactive. The reduction of harmonics and reactive contributes to the reduction of losses in transmission lines and electrical machinery, increasing the power factor, reduce the occurrence of overvoltage and overcurrent. The active power filter is the most efficient method for compensation of harmonic currents and voltages. The active power filter is necessary to use current and voltage controllers loop. Conventionally, the current and voltage control loop of active filter has been done by proportional controllers integrative.
This work, investigated the use of a robust adaptive control technique on the shunt active power filter current and voltage control loop to increase robustness and improve the performance of active filter to compensate for harmonics. The proposed control scheme is based on a combination of techniques for adaptive control pole placement and variable structure. The advantages of the proposed method over conventional ones are: lower total harmonic distortion, more flexibility, adaptability and robustness to the system. Moreover, the proposed control scheme improves the performance and improves the transient of active filter.
The validation of the proposed technique was verified initially by a simulation pro-gram implemented inC+ + language and then experimental results were obtained using a prototype three-phase active filter of 1 kVA.
Sumário i
Lista de Figuras iii
Lista de Tabelas vi
Lista de Símbolos e Abreviaturas vii
1 Introdução 1
1.1 Revisão Bibliográfica . . . 2
1.2 Contribuições do Trabalho . . . 7
1.3 Estrutura do Trabalho . . . 7
2 Modelagem do FAPPT 8 2.1 Modelagem da Malha de Corrente do Filtro Ativo Paralelo . . . 10
2.2 Modelagem da Malha de Tensão do FAPPT . . . 15
2.3 Conclusões . . . 19
3 Sistema de Controle 20 3.1 Controle Adaptativo . . . 23
3.1.1 Controle Adaptativo por Posicionamento de Pólos . . . 25
3.2 Sistemas com Estrutura Variável . . . 26
3.3 VS-APPC Aplicado ao FAPPT . . . 28
3.3.1 Controlador de Corrente VS-APPC . . . 29
3.3.2 Projeto do Controlador de Corrente . . . 31
3.3.3 Controlador de Tensão do Barramento CC com VS-APPC . . . . 33
3.3.4 Projeto do Controlador de Tensão . . . 35
3.4 Controlador Proporcional-Integrativo . . . 36
3.4.1 Projeto do Controlador PI da Malha de Corrente . . . 36
3.4.2 Projeto do Controlador PI da Malha de Tensão . . . 37
3.5 Conclusões . . . 38
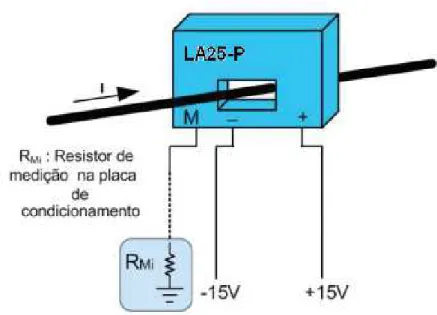
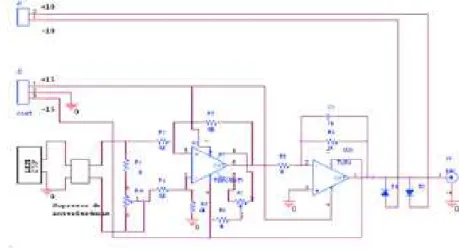
4.1.1 Sistema de Medição das Tensões e Correntes . . . 41
4.1.2 Sistema de Aquisição dos Dados . . . 43
4.2 Conclusões . . . 45
5 Análise e Projeto dos Componentes do FAPPT 46 5.1 Análise da Carga não-Linear . . . 46
5.2 Projeto dos Componentes do FAPPT . . . 47
5.2.1 Determinação dos Indutores de Acoplamento . . . 47
5.2.2 Conversor de Potência . . . 49
5.2.3 Determinação do Capacitor do Barramento CC . . . 50
5.3 Conclusões . . . 52
6 Resultados de Simulações e Experimentais 53 6.1 Simulações Iniciais . . . 53
6.2 Resultados Experimentais . . . 61
6.3 Conclusões . . . 65
7 Conclusões 70 Referências bibliográficas 72 A Desenvolvimento Matemático 76 A.1 Cálculo das tensões de eixo direto e em quadratura . . . 79
B Sistema de Condicionamento de Sinais 81 B.1 Placa Multifuncional . . . 81
B.2 Sistema de Condicionamento dos Sinais Digitais . . . 82
B.3 Sistema de Condicionamento dos Sinais para Acionamento dos Interrup-tores do Conversor . . . 83
C Fotos do Protótipo 84 D Estabilidade 87 D.1 Prova de Estabilidade . . . 87
1.1 Diagrama de blocos do filtro ativo paralelo . . . 2
1.2 Diagrama de blocos do filtro ativo série . . . 3
1.3 Diagrama de blocos do filtro ativo híbrido . . . 3
1.4 Diagrama de blocos do filtro ativo universal . . . 4
2.1 Diagrama de um sistema trifásico com uma carga não-linear e filtro ativo de potência paralelo. . . 9
2.2 Circuito equivalente do sistema trifásico com uma carga não-linear e filtro ativo de potência Paralelo. . . 9
2.3 Malha de Corrente. . . 15
2.4 Modelo do Capacitor. . . 16
2.5 Diagrama do balanço de potência no conversor. . . 17
3.1 Diagrama de blocos dosistema de controle. . . 20
3.2 Transformaçãoαβpara dq. . . 21
3.3 MSRF em diagrama de blocos. . . 22
3.4 Diagrama de blocos do detector das correntes harmônicas . . . 22
3.5 Esquema de um controlador adaptativo. . . 23
3.6 Diagrama de blocos para controle adaptativo direto. . . 24
3.7 Diagrama de blocos para controle adaptativo indireto. . . 25
3.8 Superfície de deslizamento em um sistema com estrutura variável. . . 27
3.9 Diagrama de blocos doControladorVS-APPC na malha de corrente. . . . 32
3.10 Diagrama de blocos doControladorVS-APPC na malha de Tensão. . . . 33
4.1 Diagrama de blocos doProtótipo. . . 40
4.2 Diagrama de blocos do Sistema de Aquisição de Dados . . . 42
4.3 Diagrama de blocos do Sistema de Aquisição de Dados . . . 43
4.4 Diagrama de blocos do Sistema de Aquisição de Dados . . . 44
5.1 Retificador Trifásico com filtro Indutivo. . . 46
5.2 Capacitores do barramento CC. . . 51
6.2 Resultados de simulação das (a) Correntes de linhail1, il2e il3 da carga
não-linear e (b) Espectro de amplitude da corrente de linha (il1) da carga
não-linear . . . 56 6.3 Resultados de simulação das (a) Correntes de fase is1, is2 e is3 da fonte
primária com o controlador PI e (b) Espectro de amplitude da corrente de faseis1da fonte primária . . . 57
6.4 Resultados de simulação das (a) Corrente de fase is1, is1, is1 da fonte
primária com o controlador VS-APPC e (b) Espectro de amplitude da corrente de linha da fonte primária . . . 58 6.5 Resultados de simulação do Controle de tensão do barramento CC com o
(a) PI e (b)VS-APPC . . . 59 6.6 Variação da tensão do barramento CC utilizando o controlador (a) PI e (b)
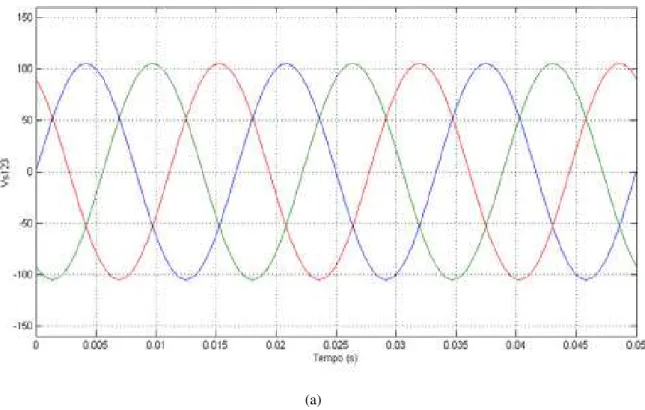
VS-APPC . . . 60 6.7 Resultados Experimentais das (a) tensões vs12, vs23, vs31 da fonte de
ali-mentação do sistema e (b)Espectro de amplitude da tensão de linhavs12
da fonte de alimentação do sistema. . . 62 6.8 Resultados Experimentais das (a) correntes de linha da carga não-linear e
(b)Espectro de amplitude da corrente de linhail1da carga não-linear . . . 63
6.9 Resultados Experimentais das (a) Corrente de fase is1, is1, is1 da fonte
primária com o controlador PI e (b) Espectro de amplitude da corrente de linhais1da fonte primária . . . 66
6.10 Resultados Experimentais das (a) Corrente de fase is1, is1, is1 da fonte
primária com o controlador VS-APPC e (b) Espectro de amplitude da corrente de linhais1da fonte primária . . . 67
6.11 Controle de tensão do barramento CC com o (a) PI e (b) VS-APPC . . . 68 6.12 Variação da tensão do barramento CC utilizando o controlador (a) PI e (b)
C.4 Retificador Trifásico. . . 86
E.1 Controle por Modelo de Referência. . . 90
E.2 MRAC Indireto. . . 90
5.1 Condições de operação . . . 48
6.1 Parâmetros do Sistema . . . 54
ω freqüência da componente fundamental do sistema elétrico
τv período do filtro passa-baixa do barramento CC
vn0 tensão entre o ponto 0 de referência e o neutro da fonte primária
0 ponto intermediário de referência
123 sistema de referência das componentes de fase
A Matriz de transformação do referencial 0dqpara o referencial 123
A−1 Matriz de transformação do referencial 123 para o referencial 0dq C Capacitor
C(θ∗) Controlador
Gid Controlador de corrente no eixo direto
Giq Controlador de corrente em quadratura
Gv Controlador de tensão para o barramento CC
L indutância da carga
P(θ∗) Modelo da planta
R resistência da carga
Rcp resistência em paralelo ao capacitor do barramento CC
Vc∗ tensão de referência do barramento CC
Vc tensão do barramento CC
θ∗c Vetor de parâmetros desconhecido do controlador
ilq Componente harmônica ( parte oscilante ) do eixo em quadratura
d-q eixo direto e em quadratura no sistema de referencial síncrono
esk tensão de fase no ponto de acoplamento comumk=1, 2, 3
ic corrente do barramento CC
ic sinal de saída do controlador de tensão
if d corrente do inversor de tensão de eixo direto
if k corrente de fase do inversor de tensãok=1, 2, 3
if q corrente de fase do inversor de tensão de eixo em quadratura
isk corrente de fase da fonte primáriak=1, 2, 3
lf k indutância de interconexãok=1, 2, 3
llk indutância entre o PAC e a cargak=1, 2, 3
lsk indutância de entradak=1, 2, 3
p-q potência ativa e reativa instantâneas
qk chaves(IGBTs) do conversor de potênciak=1, 2, 3, 4, 5, 6
rf k resistência associada a indutância de interconexãok=1, 2, 3
rlk resistência associada a indutância entre o PAC e a cargak=1, 2, 3
rsk resistência associada a indutância de entradak=1, 2, 3
vf d tensão de pólo do conversor de eixo direto
vf k tensão de pólo do conversork=1, 2, 3
vf q tensão de pólo do conversor de eixo em quadratura
vsk tensão de fase da fonte primáriak=1, 2, 3
CC: Corrente Contínua
FAPPT: Filtro Ativo de Potência Paralelo Trifásico
IEC: International Electrotechnical Comission
IEEE: Institute of Electrical and Electronic Engineers
MRAC: Model Reference Adaptive Control (Controle Adaptativo por Modelo de Refer-ência)
MRC: Model Reference Control (Controle por Modelo de Referência)
MS: Método de Sincronismo
PAC: Ponto de Acoplamento Comum
PI: Proporcional Integrativo
PLL: Phase Locked Loop (Laço de Sincronização de Fase)
PPC: Pole Placement Control (Controle por Posicionamento de Pólos)
PWM: Pulse Width Modulation (Modulação por Largura de Pulso)
THD: Total Harmonic Distortion (Distorção Harmônica Total)
VS-APPC: Variable Structure Adaptive Pole Placement Control (Controle Adaptativo por Posicionamento de Pólos e Estrutura Variável)
Introdução
O uso cada vez mais acentuado de cargas não lineares nas indústrias e nas residên-cias, como por exemplo, os retificadores controlados a tiristores, os fornos de arco, até um conjunto muito variado de aparelhos eletrônicos como as máquinas de soldar ou as lâmpadas fluorescentes contribuem para a deterioração da qualidade de energia do sis-tema elétrico. O uso desses tipos de cargas contribui para o aparecimento de correntes harmônicas, o desequilíbrio no sistema elétrico, o afundamento de tensão e oscilações. O aparecimento de correntes harmônicas na rede de energia elétrica origina quedas de tensão nas impedâncias das linhas de transmissão, que podem originar tensões assimétri-cas e distorcidas no sistema elétrico. Esses distúrbios provocam efeitos prejudiciais nos equipamentos conectados à rede. Dentre os quais, salientam-se: o aumento das perdas nas linhas de transmissão e nas máquinas rotativas e estáticas, a diminuição do fator de potência, a ocorrência de sobretensões e sobrecorrentes [Akagi 1994].
No intuito de reduzir esses efeitos, normas restritivas têm sido propostas por institu-ições americanas (IEEE - Institute of Electrical and Electronic Engineers) e européia (IEC - International Electrotechnical Comission). As principais são: IEEE-519, IEC 61000-3-2 e IEC 61000-3-4. A norma IEEE-519 [IEEE-519 1993] estabelece limites de distorção harmônica no ponto de acoplamento comum (PAC), descreve os principais fenômenos causadores de distorção harmônica e indica métodos de medição. Já a IEC 61000-3-2 [CEI/IEC 1998a] limita a emissão de correntes harmônicas, na rede pública de alimen-tação, por equipamentos de baixa tensão com correntes inferiores a 16 A. Enquanto, a norma IEC 61000-3-4 [CEI/IEC 1998b] limita a emissão de correntes harmônicas por equipamentos de baixa tensão com correntes superiores a 16 A. No Brasil, a resolução 456 da ANEEL limita o fator de potência mínimo como sendo 0,92. Já a resolução 505 define os limites máximos aceitáveis para a distorção harmônica total e o desequilíbrio das tensões como sendo 6% e 2%, respectivamente.
utilizada para limitar a propagação de harmônicas e reativos no sistema elétrico. Essa fil-tragem pode ser feita mediante utilização de filtros passivos ou ativos. Os filtros passivos são circuitos normalmente formados por indutores e capacitores, em que os valores dos componentes do circuito são determinados de acordo com a freqüência de cada harmônica a ser filtrada. Já os filtros ativos são sistemas eletrônicos de potência instalados em série ou em paralelo com a carga não-linear, no intuito de reduzir a índices aceitáveis as tensões ou as correntes harmônicas da fonte primária, ou ainda, de corrigir o fator de potência.
1.1 Revisão Bibliográfica
Durante muito tempo, os filtros L-C foram utilizados para reduzir harmônicas e os banco de capacitores para correção de fator de potência [Akagi 1992]. Porém, os filtros passivos são ineficientes na redução de harmônicas, consomem muita energia elétrica, ocupam bastante espaço físico, a compensação é fixa e possibilita a ocorrência do fenô-meno da ressonância, podendo causar sobretensões ou sobrecorrentes na rede elétrica. Portanto, a solução mais eficiente à poluição harmônica é a utilização de filtro ativo de potência [Akagi 1994, Singh et al. 1999], por ser uma solução compacta, ajustável e de alto rendimento. Os principais componentes do filtro ativo são: conversor de potência, sistema de controle, sistema de medição e indutores ou transformadores de interconexão. O filtro ativo de potência pode ser classificado tanto pela topologia como pelo método de extração das correntes ou das tensões harmônicas.
Em relação à topologia há basicamente quatro tipos de filtro ativo: Paralelo, Série, Híbrido e Universal [Skvarenina 2002].
Figura 1.1: Diagrama de blocos do filtro ativo paralelo
minimizar as correntes harmônicas, desequilíbrios de correntes ou reativos. As correntes harmônicas são compensadas mediante a injeção de correntes de compensação defasadas de 180◦ e de mesma amplitude das correntes harmônicas extraidas no ponto de acopla-mento comum [Akagi et al. 1984, Jacobina et al. 1999]. No filtro ativo série segundo é apresentado na figura 1.2, as principais funções são minimizar tensões harmônicas, bal-ancear e regular tensões terminais da carga ou da linha. O filtro ativo série é conectado antes da carga e em série com a fonte de alimentação através de um transformador de acoplamento [Akagi et al. 1990]. Os filtros ativos série são menos usados que os do tipo paralelo, visto que, por estarem em série, devem suportar a corrente da carga, o que encarece o dispositivo [Akagi 1998].
Figura 1.2: Diagrama de blocos do filtro ativo série
Já o filtro ativo Híbrido originou-se da junção do filtro ativo série com o filtro passivo paralelo consoante apresentado-se na figura 1.3, com o objetivo de conseguir uma melhor eficiência e custo que mediante uso das duas estruturas isoladamente. Há basicamente três tipos de filtro ativo híbrido: filtro ativo paralelo com um passivo paralelo, filtro ativo série conectado em série com um passivo paralelo e filtro ativo série com um passivo paralelo [Skvarenina 2002]. A última topologia é a mais utilizada, pois pode compensar tanto correntes como tensões harmônicas e, também, potência reativa.
Figura 1.3: Diagrama de blocos do filtro ativo híbrido
sultando numa estrutura de correção dos distúrbios do sistema elétrico, pois acumula as vantagens dos dois filtros [Kamran & Habetler 1995, Fujita et al. 1984]. O filtro universal é composto por um conversor para compensação de tensão, um conversor para compen-sação de corrente e o barramento CC pode ser comum aos dois conversores. As principais desvantagens são: maior número de chaves, sistema de controle mais complexo e maior número de sensores, o que resulta numa estrutura de compensação com maior custo para implementação.
Figura 1.4: Diagrama de blocos do filtro ativo universal
O método utilizado para extração das correntes harmônicas é um fator determinante no funcionamento do filtro ativo. Os métodos de extração das correntes harmônicas estão divididos em dois grupos: métodos no domínio do tempo e no domínio da freqüência. Há um grande número de métodos no domínio do tempo, os mais utilizados são o método da potência ativa e reativa instantâneas (p-q) [Akagi et al. 1984, Soares et al. 2000] e o método do referencial síncrono (d-q) [Bhattacharya & Divan 1995]. Já no domínio da freqüência o método mais utilizado é o da transformada de Fourier [Choe & Park 1996].
No método da potência ativa e reativa instantâneas, as tensões de fase e as correntes de carga são medidas e transformadas para o sistema de referência estacionárioα-β. Em seguida, calcula-se as potências instantâneas ativa (p) e reativa (q). Assim, se as cor-rentes de carga não possuírem componentes inter-harmônicas, obtêm-se potências ativa e reativa instantâneas com termos médios e oscilantes. A parte oscilante corresponde às harmônicas em quanto o valor médio corresponde a parte fundamental. As potências ativa e reativa instantâneas são filtradas, com um filtro passa alta, para separar as partes oscilantes. Essas serão utilizadas para calcular as correntes de referência no sistema de coordenadasα-β. A principal desvantagem do método (p-q) é que as correntes da fonte primária só serão senoidais se as tensões da fonte primária forem senoidais e equilibradas [Aredes & Watanabe 1995].
tensão necessário para realizar a transformação de coordenadas123/dq. Já as correntes de carga são transformadas para o sistema de coordenadas d-q, no referencial do vetor tensão. Se nas correntes de carga não houver componentes inter-harmônicas, as correntes
d e qterão componentes médias e oscilantes, em que a parte oscilante corresponde aos harmônicos. As correntesdeqsão filtradas, utilizando um filtro passa alta, para separar as partes oscilantes, pois, serão utilizadas no cálculo das correntes de referência no sistema de coordenadas d-q. A principal vantagem do método d-q em relação ao p-q é que as correntes da fonte primária poderão ser senoidais mesmo que as tensões da fonte primária sejam desequilibradas.
Já no domínio da freqüência são feitas as medições das tensões de fase da fonte primária e das correntes de carga. As tensões medidas são utilizadas para calcular o ângulo do vetor tensão. A transformada de Fourier é aplicada às correntes de carga medi-das para que sejam extraímedi-das as correntes harmônicas que serão as correntes de referência. Esse método apresenta muitas desvantagens em relação aos métodos no domínio do tempo que são: maior esforço computacional, dificuldade para implementação e resposta lenta.
Após a extração das correntes harmônicas da carga, calculam-se as correntes de refer-ência, de eixo direto e de quadratura, a serem utilizadas pelo sistema de controle do filtro ativo. A corrente de referência do eixo direto é calculada pelo somatório da corrente harmônica do eixo direto com a corrente necessária para regular o barramento CC. Já a corrente de referência do eixo em quadratura é calculada pelo somatório da corrente har-mônica do eixo quadratura com a corrente necessária para compensar o fluxo de reativos. Uma vez calculada as correntes de referência, um outro ponto crucial em um filtro ativo de potência é a definição da técnica de controle a ser utilizada que garanta estabil-idade, robustez, uma resposta dinâmica rápida e erro nulo em regime permanente. De uma maneira geral, o sistema de controle de um filtro ativo consiste basicamente: de uma malha de controle interna, responsável pela regulação da corrente e pela compen-sação de harmônicas ou reativos e malha de controle externa, responsável pela regulação da tensão do barramento CC. Na malha interna (malha de corrente) são necessários dois controladores, sendo um para controlar a corrente do eixo direto e outro para controlar a corrente do eixo em quadratura. Já a malha externa (malha de tensão) necessita de um controlador para regular a tensão do barramento CC.
foram utilizados nas malhas de controle de um filtro ativo em paralelo trifásico, no intuito, de proporcionar maior flexibilidade e robutez. Já um controlador por modos deslizantes ("Sliding-Mode Controller") foi utilizado no controle do filtro ativo, em [Furuhashi et al. 1990]. Nesse, as funções de chaveamento das variáveis de controle foram projetadas de modo a restringir a dinâmica do sistema a uma superfície, dando ao sistema rapidez no transitório, robustez a variações paramétricas e perturbações.
O método de sincronismo utilizado em um sistema de compensação é fundamental para conseguir o desempenho desejado. Logo, é necessário desenvolver métodos de sin-cronismo que operem com rapidez, com baixo erro e baixa sensibilidade a distúrbios. No intuito de reduzir o impacto desses distúrbios sobre os sinais de sincronismo gerados têm sido desenvolvidos vários métodos de sincronismo [Duarte et al. 1999, Sasso et al. 2002]. Estes métodos estão basicamente divididos em dois grupos: método de sincronismo em malha aberta e método de sincronismo em malha fechada. Nos métodos em malha aberta, pode-se obter o vetor tensão a partir da medição das tensões da fonte primária [Svensson 2001, Costa et al. 2003, Deckmann et al. 2003]. Já nos métodos de sincroniza-ção em malha fechada, destacam-se os que utilizam o PLL [Sasso et al. 2002, Hsieh & Hung 1996].
As principais vantagens dos métodos em malha aberta quando comparados aos méto-dos em malha fechada são a simplicidade estrutural e facilidade na implementação. Porém, os vários métodos em malha aberta apresentam um desempenho pior que o método em malha fechada, com relação aos sinais de sincronização gerados, na presença de distúrbios ou variações de freqüência nas tensões da fonte primária [Sasso et al. 2002].
De um modo geral, a maior parte das técnicas de controle utilizadas em filtros ativos usa uma compensação fixa das harmônicas [Akagi 1994]. Mas, em um sistema real, tanto o comportamento aleatório da carga não-linear como a própria linha de transmissão introduz variações paramétricas no modelo dinâmico do FAPPT, dinâmicas não modelada e perturbações. Logo, torna-se necessário utilizar uma técnica de controle adaptativa, visto que essa poderá dar a robustez necessária ao sistema.
implementação.
1.2 Contribuições do Trabalho
Os objetivos deste trabalho são implementar e comparar o uso de uma técnica de con-trole adaptativo robusto de fácil implementação no FAPPT, de modo a reduzir, a índices aceitáveis, as correntes harmônicas, e também avançar nos estudos de filtro ativo de potên-cia paralelo, em espepotên-cial, em sua técnica de controle e modelagem. A nova técnica de controle utilizada resulta da combinação das técnicas de controle adaptativo por posi-cionamento de pólos e estrutura variável (VS - APPC). Além disso, é apresentada a mod-elagem do filtro ativo paralelo para as malhas de corrente e tensão. O método utilizado para extração das correntes harmônicas é od-q.
1.3 Estrutura do Trabalho
Este trabalho está organizado da seguinte forma:
O capítulo 2 aborda, de maneira detalhada, todo procedimento utilizado para se obter os modelos das malhas de corrente e tensão do filtro ativo de potência paralelo trifasico e equilibrado.
No capítulo 3 é inicialmente apresentado um resumo sobre a teoria básica de controle adaptativo, bem como a justificativa para aplicar o controlador VS-APPC nas malhas de controle de corrente e tensão do FAPPT. Alem disso, é apresentado a base teórica e o método utilizado para projetar os parâmetros do controlador VS-APPC.
Os capítulos 4 e 5, por sua vez, retratam, respectivamente, a descrição do protótipo e a técnica de projeto para dimensionamento dos principais componentes do protótipo do Filtro Ativo de Potência trifásico Paralelo, tais como: indutores, capacitores e conversor.
Já no capítulo 6 apresenta-se os resultados de simulação digital e experimentais para validação das técnicas de controle aplicadas a filtros ativos de potência.
Modelagem do FAPPT
Neste capítulo será apresentada a modelagem das malhas de corrente e tensão do FAPPT. No desenvolvimento da modelagem a carga não-linear é substituída por fontes de correntes. Os modelos são obtidos no referencial das componentes de fase(123), porém, a esses modelos aplicam-se uma transformação de variáveis como forma de simplificar os modelos. Na figura 2.1 apresenta-se o diagrama elétrico do sistema trifásico composto por uma fonte de tensão trifásica, uma carga não-linear e um inversor de tensão trifásico. Os termosvs1,vs2evs3representam as tensões nas fases 1, 2 e 3 da fonte primária;ls1,ls2
els3representam as indutâncias de entrada nas fases 1, 2 e 3;rs1,rs2ers3representam as
resistências associadas as indutâncias de entrada nas fases 1, 2 e 3. As correntes de fase da fonte primária são representadas poris1,is2eis3. O inversor de tensão é constituído por
seis chaves de potência (IGBTs)q1,q2,q3,q4,q5,q6e os respectivos diodos de roda livre.
As chavesq1, q2eq3funcionam de forma complementar aq4,q5 eq6, respectivamente.
As correntes de fase do inversor de tensão são representadas porif1,if2eif3; a corrente
do barramento CC é representada por ic; C representa a capacitância e vdc a tensão no
barramento CC. Observa-se que as indutâncias de interconexão são representadas porlf1,
lf2elf3em querf1, rf2erf3 são as resistências associadas as indutânciaslf1, lf2 elf3,
respectivamente. O ponto intermediário "0"será utilizado como um dos referenciais de tensão. As tensões de fase no ponto de acoplamento comum são representadas pores1,
es2ees3. A resistência e indutância da carga são representadas porReL. As indutâncias
ll1,ll2ell3foram utilizadas para reduzir a derivada de corrente da carga, em querl1,rl2e
rl3são as resistências asssociadas as indutânciasll1,ll2ell3, respectivamente. As tensões
de pólo do conversor são representadas porvf1,vf2evf3.
Figura 2.1: Diagrama de um sistema trifásico com uma carga não-linear e filtro ativo de potência paralelo.
2.1 Modelagem da Malha de Corrente do Filtro Ativo
Paralelo
O modelo da malha de corrente do FAPPT será obtido com base no circuito equiva-lente apresentado na figura 2.2. Aplicando-se a lei de Kirchhoff das tensões às malhas do circuito equivalente da figura 2.2 obtem-se as seguintes expressões:
vs1−rs1is1−ls1didts1+rf1if1+lf1
dif1
dt −vf1+vn0=0 (2.1)
vs2−rs2is2−ls2didts2+rf2if2+lf2
dif2
dt −vf2+vn0=0 (2.2)
vs3−rs3is3−ls3didts3+rf3if3+lf3
dif3
dt −vf3+vn0=0 (2.3)
onde, vn0 é a diferença de potencial entre o ponto "0"de referência e o neutro da fonte
primária (neutro virtual).
Também, aplicando-se a lei de Kirchhoff aos nós 1−3 do circuito da figura 2.2, rela-tivo a interconexão do filtro a rede de energia elétrica, obtem-se que:
is1=il1−if1 (2.4)
is2=il2−if2 (2.5)
is3=il3−if3 (2.6)
Considerando-se que o circuito da figura 2.2 é equilibrado, então,rs1=rs2=rs3=rs,
ls1=ls2=ls3=ls, rf1=rf2=rf3=rf elf1=lf2=lf3=lf. Assim, substituindo as
expressões 2.4, 2.5 e 2.6 em 2.1, 2.2 e 2.3, respectivamente. Obtem-se:
vs1−(rsil1+ls
dil1
dt ) + (rf+rs)if1+ (lf+ls) dif1
dt −vf1+vn0=0 (2.7) vs2−(rsil2+ls
dil2
dt ) + (rf+rs)if2+ (lf+ls) dif2
dt −vf2+vn0=0 (2.8) vs3−(rsil3+ls
dil3
dt ) + (rf+rs)if3+ (lf+ls) dif3
Definindo-se a resistênciart e a indutâncialt como sendort=rs+rf elt =ls+lf, e
reescrevendo as expressões 2.7, 2.8 e 2.9, em termos dert elt tem-se:
vf1−vn0−vs1+ (rsil1+ls
dil1
dt ) =rtif1+lt dif1
dt (2.10) vf2−vn0−vs2+ (rsil2+ls
dil2
dt ) =rtif2+lt dif2
dt (2.11) vf3−vn0−vs3+ (rsil3+ls
dil3
dt ) =rtif3+lt dif3
dt (2.12)
O efeito da carga não-linear pode ser introduzido ao modelo do sistema através dos termos(rsil1+lsdidtl1), (rsil2+lsdidtl2) e(rsil3+lsdidtl3)que representam fontes de tensões,
ou seja,f.e.m. Logo, define-seul1=rsil1+lsdidtl1,ul2=rsil2+lsdidtl2,ul3=rsil3+lsdidtl3 e
substituindo-se nas expressões 2.10, 2.11 e 2.12, respectivamente, o que resulta em:
vf1−vn0−vs1+ul1=rtif1+lt
dif1
dt (2.13)
vf2−vn0−vs2+ul2=rtif2+lt
dif2
dt (2.14)
vf3−vn0−vs3+ul3=rtif3+lt
dif3
dt (2.15)
O modelo de primeira ordem para o sistema pode ser obtido se as tensõesulk, vn0 e
vsk,k=1,2,3 forem tratadas como sendo pertubações a serem compensadas pelo sistema
de controle. Portanto, fazendo-se:
v′f1=vf1−vs1−vn0+ul1
v′f2=vf2−vs2−vn0+ul2
v′f3=vf3−vs3−vn0+ul3
e substituindo as definições anteriores nas expressões 2.13, 2.14 e 2.15 tem-se que:
v′f1=rtif1+lt
dif1
dt (2.16)
v′f2=rtif2+lt
dif2
v′f3=rtif3+lt
dif3
dt (2.18)
Utilizando-se a representação matricial em componentes de fase, obtem-se que:
v′f1 v′f2 v′f3
=
rt 0 0
0 rt 0
0 0 rt
if1
if2
if3 +
lt 0 0
0 lt 0
0 0 lt
dtd
if1
if2
if3
(2.19)
Para simplificar o modelo da malha de corrente do FAPPT será realizada um mudança de base para o referencial do vetor tensão, coordenadas0dq. A matriz de transformação que permite essa representação é dada por:
x123=Ax0dq (2.20)
x0dq=A−1x123 (2.21)
A−1=AT (2.22)
Em que x123 representa as variáveis em componentes trifásicas ex0dq representa as
variáveis equivalentes na nova base bifásica 0dq. A matriz "A−1"transforma o sistema de coordenadas 123 para 0dq, no referencial do vetor tensão. Cuja matrizAé dada por:
A= r 2 3 1 √
2 cos(ωt) −sen(ωt) 1
√
2 cos(ωt−2π/3) −sen(ωt−2π/3) 1
√
2 cos(ωt+2π/3) −sen(ωt+2π/3)
Aplicando a definição apresentada na expressão 2.20 às componentes de fase da expressão 2.19, chega-se:
A
v′f0 v′f d v′f q
=
rt 0 0
0 rt 0
0 0 rt
A
if0
if d
if q
+
lt 0 0
0 lt 0
0 0 lt
dtd
A
if0
if d
if q
(2.23)
v′f0 v′f d v′f q
=A−1
rt 0 0
0 rt 0
0 0 rt
A
if0
if d
if q
+A−1
lt 0 0
0 lt 0
0 0 lt
dtd
A
if0
if d
if q
Na expressão anterior é necessário calcular a derivada de um produto de funções, logo, será utilizado a regra da cadeia para cálculo da derivada. Assim, tem-se:
v′f0 v′f d v′f q
=A−1
rt 0 0
0 rt 0
0 0 rt
A
if0
if d
if q
+A−1
lt 0 0
0 lt 0
0 0 lt
dAdt
if0
if d
if q
+
A−1
lt 0 0
0 lt 0
0 0 lt
Adtd
if0
if d if q
(2.24)
A derivada da matriz de transformação em relação ao tempo é dada por:
dA dt = q 2 3
0 −ωsen(ωt) −ωcos(ωt)
0 −ωsen(ωt−2π/3) −ωcos(ωt−2π/3)
0 −ωsen(ωt+2π/3) −ωcos(ωt+2π/3)
(2.25)
Substituindo o termo calculado em 2.25 na expressão 2.24 e realizando as devidas multiplicações (Ver Apêndice A), chega-se:
v′f0 v′f d v′f q
=
rt 0 0
0 rt 0
0 0 rt
if0
if d
if q
+
0 0 0 0 0 −ωlt
0 ωlt 0
if0
if d
if q
+
lt 0 0
0 lt 0
0 0 lt
dtd
if0
if d
if q
(2.26)
Como o sistema é trifásico com neutro isolado a componente homopolar da corrente é nula, pois if0=if1+if2+if3=0. A componente homopolar da tensão também será
"
v′f d v′f q
#
=
"
rt 0
0 rt
# "
if d
if q
#
+
"
0 −ωlt ωlt 0
# "
if d
if q
#
+
"
lt 0
0 lt
#
d dt
"
if d
if q
#
(2.27)
Aplicando a transformada de Laplace a equação 2.27 obtém-se a seguinte equação no domínio da freqüência:
"
Vf d′ (s)
Vf q′ (s)
#
=
"
rt 0
0 rt
# "
If d(s)
If q(s)
#
+
"
0 −ωlt ωlt 0
# "
If d(s)
If q(s)
#
+s
"
lt 0
0 lt
# "
If d(s)
If q(s)
#
(2.28) Resolvendo o sistema da equação 2.28. Assim:
If d(s) =
1/lt (s+rt
lt)
Vf d′′ (s) (2.29)
If q(s) = 1/lt (s+rt
lt)
Vf q′′ (s) (2.30) onde,
Vf d′′ =Vf d′ +ωltIf q (2.31)
Vf d′ =Vf d−Vsd+Uld (2.32)
Vf q′′ =Vf q′ −ωltIf d (2.33)
Vf q′ =Vf q−Vsq+Ulq (2.34)
Observa-se nas expressões 2.29 e 2.30 um acoplamento entre os eixos direto e de quadratura. Para eliminar o acoplamento observado, pode-se fazer com queVf d =V
′′
f d+
Vsd−Uld−ωltIf q eVf q=V
′′
f q+Vsq−Ulq+ωltIf d assumam valores tais que compensem
de forma inversa o intercruzamento entre as variáveis de eixo direto e em quadratura, cujo diagrama de blocos é apresentado na figura 2.3.
Verifica-se nas expressões 2.32 e 2.34 que as tensões de eixo diretoVf d′ e em quadratura
Vf q′ não dependem da tensãoVn0(ver Apêndice A).
Figura 2.3: Malha de Corrente.
real sabe-se que, para não haver uma interrupção prolongada no fornecimento de ener-gia, há mais de um alimentador apto a fornecer energia elétrica a uma carga. Então, em um sistema elétrico de potência a carga está sujeita a mudanças de alimentador e conse-quentemente a variação de resistência e indutância de entrada, da fonte primária, portanto, é fundamental que o sistema de controle seja robusto a essas variações paramétricas.
2.2 Modelagem da Malha de Tensão do FAPPT
A malha de tensão do FAPPT é responsável pela regulação da tensão do barramento CC. O controlador de corrente está em cascata com o de tensão, portanto, se ocorrer uma variação na tensão do barramento CC, deve ocorrer uma variação na corrente de eixo direto id e vice-versa. Então, como o capacitor não é uma fonte de tensão constante é
necessário utilizar um controlador para regulação da tensão no barramento CC. Portanto, a obtenção de um modelo realista da planta do barramento CC facilita o projeto de seu controlador. Na figura 2.4 apresenta-se o circuito equivalente do barramento CC, em que
Crepresenta a capacitância eRcpa resistência em paralelo ao capacitor, quando
considera-se uma modelagem realista do capacitor.
Figura 2.4: Modelo do Capacitor.
expressão:
cdvc dt +
vc
Rcp
=ic (2.35)
onde,ic é uma função chaveada dada poric= f1if1+f2if2+f3if3 em que f1,f2e f3
são funções chaveadas que definem os ciclos de trabalho das chaves do conversor. Escrevendo a expressão para calcularicna forma matricial tem-se:
ic=
h
f1 f2 f3 i
if1
if2
if3
(2.36)
Sabendo queA−1A=I. Então, tem-se:
ic=
h
f1 f2 f3 i
AA−1
if1
if2
if3
Utilizando as propriedades(AB)T =BTAT eA−1=AT, obtem-se:
ic= (A−1
h
f1 f2 f3 iT
)TA−1
if1
if2
if3
Então, a corrente do barramento CC no referêncial do vetor tensão é:
ic=
h
f0 fd fq
i
if0
if d
if q
onde, f0,fd e fqsão funções chaveadas que definem os ciclos de trabalho das chaves
com-ponente de sequência zero é nula, logo, tem-se:
ic= fdif d+fqif q= f1if1+f2if2+f3if3 (2.37)
Se forem desprezadas as perdas do sistemas tem-se que a potência elétrica CC na entrada do conversor é igual a potência elétrica CA na saída do conversor conforme é apresentado na figura 2.5. Então tem-se:
Figura 2.5: Diagrama do balanço de potência no conversor.
PCA =PCC (2.38)
Substituindo as potências elétricas CA e CC, em valores médios, na equação 2.38, obtem-se:
vf1if1+vf2if2+vf3if3=vdif d+vqif q (2.39)
onde, vf1, vf2 evf3são tensões de pólo do conversor, já vd evq são tensões de eixo
direto e de quadratura da fonte primária, no referencial dodq.
Considerando as tensões da fonte primária equilibradas tem-se que as tensões de eixo diretovd e quadraturavqsão dadas por:
vd=
r
3 2Vp
vq=0
(2.40)
onde,Vpé o valor de pico da tensão de fase da fonte primária.
As tensões de pólo do conversor, em valores médios, pode ser calculadas por:
vf1= (2f1−1)
Vc∗
2
vf2= (2f2−1)
Vc∗
2
vf3= (2f3−1)
Vc∗
2
c
Substituindo a expressão 2.40 e 2.41 na expressão 2.39, obtem-se:
Vc∗
2 [(2f1−1)if1+ (2f2−1)if2+ (2f3−1)if3] =
r
3
2Vpif d (2.42) Agrupando os termos semalhantes na equação 2.42 e sabendo queif1+if2+if3=0,
pois o sistema é trifásico com neutro isolado, tem-se:
Vc∗
2 (2f1if1+2f2if2+2f3if3) =
r
3 2Vpif d
Então, fazendo as simplificações devidas e passando o termoVc∗para o segundo mem-bro, tem-se:
f1if1+f2if2+f3if3= r
3 2
Vp
Vc∗if d (2.43)
Portanto, comparando a equação 2.43 com a equação 2.37, verifica-se que:
fd=
r
3 2
Vp
Vc∗ if q=0
Logo, a corrente do barramento CCicé reduzida à seguinte expressão:
ic= fdif d (2.44)
Substituindo a expressão 2.44 na expressão 2.35, tem-se:
cdvc dt +
vc
rcp
= fdif d (2.45)
Reescrevendo-se a equação 2.45 no domínio da freqüência, e rearranjando-se na forma de função de transferência chega-se a seguinte expressão:
Vc
FdIf d
= 1/c
s+ 1
rcpc
(2.46)
G= 1
sτv+1
(2.47) Então, o modelo mais aproximado do barramento CC é obtido levando-se em consid-eração o efeito do filtro passa-baixa, portanto, a função de transferência do barramento CC é dada por:
Vc
If d =Fd
1
τvc s2+s(τv+rcpc
τvrcpc
) + 1 τvrcpc
(2.48)
2.3 Conclusões
Neste capítulo foram desenvolvidos, de maneira detalhada, os modelos para as malhas de corrente e tensão de um filtro ativo de potência paralelo trifásico. Os modelos obtidos são para um sistema trifásico equilibrado e com neutro isolado. Portanto, devido a essas restrições os modelos obtidos, neste capítulo, não se aplicam a sistemas trifásicos dese-quilibrados e com neutro aterrado. Porém, a metodologia utilizada na modelagem pode ser aplicada na modelagem de filtros ativos paralelos.
Sistema de Controle
Neste capítulo serão apresentados o sistema de controle utilizado no FAPPT, os con-troladores convencionais e a descrição do controlador VS-APPC. No sistema de controle do FAPPT existe básicamente a necessidade de três controladores sendo dois para o con-trole das correntes de compensação dos eixos diretoif d e em quadraturaif q e outro para
controlar a tensão do barramento CC.
Figura 3.1: Diagrama de blocos dosistema de controle.
Na figura 3.1 apresenta-se o diagrama de blocos do sistema de controle normalmente utilizado no FAPPT [Verdelho & Marques 1997]. Neste diagrama, os blocos FPA são filtros passa-alta que tem por função extrair as harmônicas da corrente de carga; o bloco 123/dqtransforma as variáveis do sistema de referência das componentes de fase ( 123 ) para o sistema de referência do vetor tensão (dq); o blocodq/αβrealiza a transformação do referencial dq, do vetor tensão, para o referencial αβ ( referencial estacionário); o bloco αβ/123 realiza a transformação do referencial estacionário para o referencial das componentes de fase. No diagrama existe um controlador de corrente no eixo diretoGid
Gv. Os controladores foram representados de forma genérica para permitir a utilização
da mesma estrutura tanto para os controladores convencionais como para o controlador proposto. O bloco "MS "refere-se ao método de sincronização utilizado para calcular o ângulo do vetor tensão que é necessário para realizar a transformação do referencial estacionário (αβ) para o síncrono (dq). Nesse trabalho utiliza-se o método, em malha aberta, da estrutura de referência síncrona modificada (MSRF - Modified Synchronous Reference Frames) em que as tensões de faseV123, no sistema referência trifásico, são
transformadas para o sistema de referência síncrona.
O primeiro passo é achar a representação do vetorV123no sistema de coordenadasαβ,
ou seja, aplicar a matriz de transformação A fazendoωt=0.
Vαβ=AV123
onde:
A=
r
2 3
"
1 0
−12 − 1 2
√
3
2 −
√
3 2
#
Em seguida, o vetorVαβ é transformado para coordenadas síncrona dq, obtida pela rotação de eixosαeβde um ânguloθ=ωt.
Figura 3.2: Transformaçãoαβpara dq.
As componentes do vetor tensão em coordenadasαβconforme é apresentado na figura 3.2 são utilizadas no cálculo das funçõessen(θ)ecos(θ), ou seja,
sen(θ) = Vβ
Vαβ
; cos(θ) = Vα
Vαβ
Vαβ= q
V2 α +Vβ2
Na figura 3.3 apresenta-se o diagrama de blocos do método de sincronização MSRF. No diagrama são realizadas as medições das tensões da fonte primária, em seguida, estas medições são transformadas para o referencial estacionário através do bloco 123/αβ. No novo sistema de referência são calculados o seno e o cosseno do ângulo do vetor tensão. A principal vantagem deste método é a simplicidade estrutural e a facilidade na implementação. Porém, os métodos em malha aberta não são robustos na presença de distúrbios ou variações de freqüência nas tensões da fonte primária.
Figura 3.3: MSRF em diagrama de blocos.
O controlador de tensãoGv é responsável por regular a tensão do barramento CC na
tensão de referênciav∗c e o sinal de controle de saída servirá como uma das referências
da malha de corrente do eixo direto. Já as correntes de linha medidas na carga são trans-formadas para o referencial do vetor tensão (dq). Neste sistema de referência as correntes terão uma componente constante e outra oscilante, em que a componente constante cor-responde a parcela da componente fundamental das correntes de carga e a componente oscilante as harmônicas.
Logo, as correntes de carga, no referencial do vetor tensão, passam por filtros passa-alta para extrair as componentes harmônicas ( parte oscilante ) dos eixos diretod e em quadratura q conforme é apresentado na figura 3.4. A componente harmônica ( parte oscilante ) do eixo direto ˜ild juntamente com o sinal de saída do controlador de tensãoic
formam a corrente de referência do eixo direto i∗f d. Já a corrente de referência do eixo em quadratura i∗f q é formada pela componente harmônica (parte oscilante) do eixo em quadratura ˜ilq e a componente irf q que pode ser ajustada como nula caso não se deseje
compensar reativos. Além disso, as correntes de referência calculadas são subtraidas das correntes do filtro, no referencial do vetor tensão, medidas if d e if q, e os sinais de erro
gerados deverão ser zerados pelos controladores de correnteGid eGiq, respectivamente.
Os sinais de controle gerados irão comandar o conversorVSIde tensão utilizando a técnica de PWM escalar [Holtz 1994].
3.1 Controle Adaptativo
Diferentemente dos controladores convencionais, no controlador adaptativo realiza-se a estimação dos parâmetros da planta, que são conhecidos com incertezas, (ou do controlador) em tempo real baseado nos sinais medidos do sistema. Os parâmetros esti-mados são usados no cálculo da lei de controle, tendo como objetivo alterar o comporta-mento do sistema de modo a ajustá-lo as circunstâncias novas ou modificadas [Ioannou & Sun 1996]. Portanto, um sistema de controle adaptativo consiste em aplicar alguma técnica de estimação para obter os parâmetros do modelo do sistema a partir de medições das entradas e saídas, e usar este modelo para projetar um controlador.
✲
✲ ✲
✲ ✲
✛
❄
✛
controlador referência
processo saída ajuste de
parâmetros
parâmetros do controlador
sinal de controle
Figura 3.5: Esquema de um controlador adaptativo.
apresen-✲ ✁✁
✁✁✕
Estimação em tempo real
deθ∗c
✲ ✲ Controlador
✛ ✛
C(θc)
u Planta
P(θ∗)→Pc(θ∗
c)
✲
y r
θc r
Figura 3.6: Diagrama de blocos para controle adaptativo direto.
tado na Figura 3.5. A forma como o estimador de parâmetros é combinado com a lei de controle resulta em dois diferentes métodos. No primeiro método, conhecido como
controle adaptativo direto, o modelo da planta é parametrizado em função dos parâmet-ros do controlador, os quais são estimados diretamente, sem cálculos intermediários en-volvendo estimativas de parâmetros da planta. No segundo método, conhecido como
controle adaptativo indireto, os parâmetros da planta são estimados a cada instante e utilizados para o cálculo dos parâmetros do controlador.
Na Figura 3.6 apresenta-se em diagrama de blocos a estrutura básica do controlador adaptativo direto. Nesta estrutura de controle adaptativo direto, o modelo da plantaP(θ∗)
é parametrizado em função de um vetor de parâmetros desconhecido θ∗c do controlador, o qualC(θ∗c)atende os requisitos de desempenho, para obter o modelo Pc(θ∗c)com ex-atamente as mesmas características entrada/saída deP(θ∗). O estimador de parâmetros, em tempo real, é projetado baseado em Pc(θ∗c), ao invés de P(θ∗), para prover estima-tivas diretasθc(t) deθ∗c em cada instante t através do processamento da entradau e da saídayda planta. A estimativa θc(t)é então usada para atualizar o vetor de parâmetros do controladorθc sem cálculos intermediários. A escolha da classe de leis de controle
C(θc)e os estimadores de parâmetros que geramθc(t), de forma queC(θc(t))atenda os requisitos de desempenho para o modeloP(θ∗)são os principais problemas no controle
adaptativo direto. As propriedades do modelo P(θ∗) são fundamentais na obtenção do modelo parametrizadoPc(θ∗c)que é conveniente para a estimação em tempo real. Como conseqüência, o controle adaptativo direto é restrito a certas classes de modelos de planta. Uma classe de modelos possível consiste em todas as plantas monovariáveis, lineares e invariantes no tempo (LTI) que são de fase mínima, isto é, seus zeros estão localizados no semi-plano esquerdo.
✁✁ ✁✁✕
❄ ❄
✲ ✲ ✲
✲
✲
✛ ✛
θc
u
θ(t)
Controlador Planta
C(θc)
Estimação deθ∗
r r
Cálculo
θc(t) =F(θ(t))
y P(θ∗)
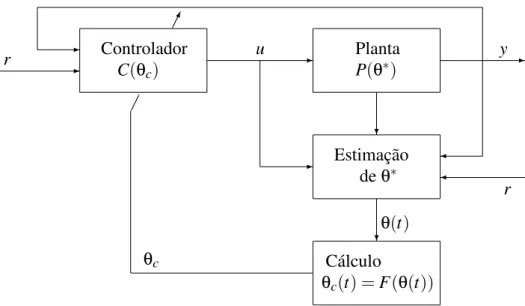
Figura 3.7: Diagrama de blocos para controle adaptativo indireto.
adaptativo indireto. Nesta estrutura de controle, o modelo da plantaP(θ∗)é parametrizado em relação a um vetor de parâmetros desconhecidos θ∗. Um estimador em tempo real gera uma estimativaθ(t) deθ∗ a cada instantet, processando a entradau e a saíday. A estimativa dos parâmetrosθ(t)especifica um modelo estimado caracterizado por ˆP(θ(t)), que é usado para calcular os parâmetros do controlador ou vetor de ganhosθc(t)a cada instante t. Este modelo estimado, para o projeto do controlador, é tratado como sendo o verdadeiro modelo da planta no instantet. Se as estimativas dos parâmetros da planta convergir para os valores corretos, então o controlador pode estabilizar o sistema. Esse princípio é conhecido comoprincípio de equivalência à certeza. As formas da lei de controleC(θc) e da equação algébrica θc =F(θ) são escolhidas como as mesmas que
seriam usadas para atender os requisitos de desempenho para o modeloP(θ∗)seθ∗fosse conhecido. Neste método,C(θc(t))é ajustado a cada instante t, de modo a satisfazer os requisitos de desempenho do modelo estimado ˆP(θ(t)). Assim, o principal problema no controle adaptativo indireto é escolher a classe de leis de controleC(θc) e a classe de estimadores de parâmetros que geramθ(t), bem como a equação algébricaθc=F(θ(t)), de forma queC(θc(t))atenda os requisitos de desempenho para o modeloP(θ∗)comθ∗
desconhecido.
3.1.1 Controle Adaptativo por Posicionamento de Pólos
tação é então desenvolvida alocando os pólos de malha fechada nas posições desejadas. A estrutura do controladorC(θ∗c)e o vetor de parâmetrosθ∗c são escolhidos de forma que os pólos da função de transferência da planta em malha fechada sejam iguais aos desejados. O vetorθ∗c é geralmente calculado em função deθ∗, onde θ∗é um vetor com os coeficientes da função de transferência da planta.
Se θ∗ é conhecido, então θ∗c é calculado e usado na lei de controle. Quando θ∗ é desconhecido, θ∗c é também desconhecido e o PPC não pode ser implementado. Nesse
caso, pode-se usar o princípio de equivalência à certeza para substituir o vetor descon-hecidoθ∗c por sua estimativaθc(t). são calculados baseados nas estimativas dos parâmet-ros da planta, como se esses fossem os verdadeiparâmet-ros parâmetparâmet-ros. Essa estrutura resultante é referida como APPC indireto. Se os parâmetros do controlador θc(t) são atualizado diretamente usando um estimador de parâmetros em tempo real, essa estrutura é referida como um APPC direto. Casoθc(t)seja calculado em função de θ(t), que é uma estima-tiva paraθ∗gerada por um estimador em tempo real, essa estrutura é referido como APPC indireto. As estruturas do APPC direto e indireto são as mesmas que as apresentada nas Figuras 3.6 e 3.7, respectivamente, para o caso geral.
3.2 Sistemas com Estrutura Variável
A teoria de sistemas com estrutura variável tem sido utilizada no tratamento de prob-lemas de sistemas de controle, principalmente, na forma conhecida como controle por modos deslizantes. Neste método, as funções de chaveamento das variáveis de cont-role devem ser projetadas de modo a restringir a dinâmica do sistema a uma superfície chamadasuperfície deslizante.
Os sistemas com estrutura variável têm como principais características a rapidez do transitório e robustez a variações paramétricas e perturbações, dentro de uma faixa de tolerância estipulada no projeto.
Esta teoria teve origem no estudo dos controladores à relé e baseia-se no chaveamento das variáveis de controle dentro de um conjunto de funções das variáveis de estado da planta de acordo com uma dada regra, o que impõe para este método o conhecimento de todas as variáveis de estado do sistema [Silva & Araújo 2007].
Considerado o seguinte sistema de segunda ordem:
˙
x1=x2
˙
x2=a1x1+a2x2+u
coma1ea2conhecidos com incertezas.
Define-se uma superfície de chaveamentoscomo
s=x∈R2|s(x) =cx1+x2=0,c>0 (3.2)
na qual deseja-se que permaneçam as variáveis de estadox1 ex2(dinâmica do sistema).
Deve ser satisfeita a condiçãoss˙<0 para se ter o comportamento ilustrado na Figura 3.8.
Figura 3.8: Superfície de deslizamento em um sistema com estrutura variável.
Em um problema de estabilização deve-se ter: lim
t→∞x1(t) =0 e limt→∞x2(t) =0.
Definindou(x)da forma:
u(x) =
(
u+(x), se s(x)>0
u−(x), se s(x)<0 (3.3) tem-se queu=g(θ1,θ2,x1,x2), onde:
θ1=−θ¯1sgn(sx1), θ¯1>|a1|
θ2=−θ¯2sgn(sx2), θ¯2>|c+a2|
(3.4)
Os valores dos parâmetros ¯θ determinam a rapidez com que a trajetória atinge a su-perfície de deslizamento.
Desta forma, o sistema torna-se:
˙
x=
(
f+(x), se s(x)>0
s(x)·s˙(x)<0 (3.6) Pode-se interpretar a condição de deslizamento como a derivada (negativa) da função de 12s(x)2, que é uma medida da distância à superfície de deslizamentos(x) =0.
Se a condição de deslizamentos(x)·s˙(x)<0 é satisfeita em uma vizinhança des(x)<
0, os campos vetoriais representados por f+(x) e f−(x) apontam para esta superfície e, portanto, se uma trajetória alcança s(x), é forçada a permanecer (deslizar) sobre esta superfície.
3.3 VS-APPC Aplicado ao FAPPT
As duas principais abordagens do controle adaptativo (direto e indireto) utilizam al-goritmos de adaptação que, em geral, baseiam-se em uma lei do tipo integral [Narenda et al. 1980].
Com o objetivo de agregar as características do APPC e do VSC, ou seja, aplicabili-dade a plantas de fase não mínima, transitório rápido e robustez. Este trabalho propõe a utlização do controlador VS-APPC (Controle Adaptativo por Posicionamento de Pólos e Estrutura Variável) na malha de controle do FAPPT, pois, substitui as leis integrais dos controladores convencionais por leis chaveadas.
3.3.1 Controlador de Corrente VS-APPC
A função de transferência da malha de corrente é dada por:
If dq(s)
Vf dq′′ (s) =
1/lt (s+rt
lt)
= bdq
(s+adq) (3.7)
Onde os parâmetrosadqebdq correspondem aos pólos e ganhos dos modelos
simpli-ficado do eixo direto e de quadratura da malha de corrente do FAPPT, respectivamente, a ser controlada. Aplicando a transforma inversa de Laplace a equação 3.7 obtém-se a equação dinâmica da malha de corrente do FAPPT no domínio do tempo é dada por:
˙
if dq=−adqif dq+bdqv′′f dq (3.8)
Devido a complexidade do sistema real algumas características como incertezas paramétri-cas, dinâmicas não modeladas pertubações. Logo, a utilização do controlador VS-APPC neste tipo de planta é fundamental, pois, o VS-APPC irá estimar os parâmetros do FAPPT, em tempo real, baseado nos sinais de entrada e saída medidos do sistema. Os parâmetros estimados são usados no cálculo da lei de controle, para que a corrente de faseif dq do
FAPPT tenda a corrente de referênciai∗f dq e os pólos de malha fechada da planta sejam alocados nas raízes do polinômioA∗(s).
A∗(s) =s2+α1∗dqs+α∗0dq=0
Onde os coeficientesα∗1dq eα∗0dqdeterminam o desempenho desejado do sistema em malha fechada. Caso seja adicionado uma constante arbitrária de projeto am>0 ( Ver
Apêndice D ) à equação 3.8, tem-se:
˙
if dq=−amif dq+ (am−adq)if dq+bbqv′′f dq (3.9)
O modelo estimado para o FAPPT, que é usado para calcular os parâmetros do con-trolador a cada período de amostragem. Este modelo, para o projeto do concon-trolador, é tratado como o verdadeiro modelo do FAPPT no intervalo de chavemento. Sendo dado por:
˙ˆ
if dq=−amiˆf dq+ (am−aˆdq)if dq+bˆdqv
′′
f dq (3.10)
Onde ˆadqe ˆbdqsão estimativas paraadqebdq, respectivamente [Silva & Araújo 2007].
e0f dq=if dq−iˆf dq (3.11)
Os parâmetros ˆadq e ˆbdq são obtidos através das leis chaveadas: ˆ
adq=−a¯dqsgn(e0f dqif dq) +adq(nom)
ˆ
bdq=b¯dqsgn(e0f dqvf dq) +bdq(nom)
(3.12)
Desde que as seguintes restrições sejam satisfeitas ¯adq >|adq−adq(nom)| e ¯bdq >
|bdq−bdq(nom)|; bdq(nom) eadq(nom) são valores nominais de bdq eadq, respectivamente,
utilizados para reduzir a amplitude do chaveamento dos parâmetros, e consequentemente a amplitude do sinal de controle. As restrições garantem erro de estimação nulo e0f d =
e0f q=0 ( ver Apêndice D ).
A lei de controle do VS-APPC é dada por:
Qm(s)L(s)V′′f dq(s) =−P(s)(If dq−I∗f dq) (3.13) Então reescrevendo a expressão 3.13 em forma de função de transferência, tem-se :
Cf dq(s) = V
′′f dq(s)
I∗f dq−If dq
= Pdq(s)
Qm(s)L(s) (3.14)
Onde Qm(s) é um polinômio de grau q e representa o modelo interno da corrente de referência i∗f dq; Pdq(s) e L(s)(mônico) são polinômios com grau q+n−1 e n−1, respectivamente, em que n é o número de pólos da planta a ser controlada. Qm(s) é escolhido para satisfazer Qm(s)i∗f dq=0. Como a função de transferência do FAPPT é de primeira ordem os polinômios do controlador são L(s) = 1, Qm(s) = s e Pdq(s) =
ˆ
p1dqs+pˆ0dq, os coeficientes ˆp1dqe ˆp0dqsão as estimativas dos parâmetros do controlador
e satisfazem a equação Diofantina dada por:
s(s+aˆdq) + (pˆ1dqs+pˆ0dq)bˆdq=s2+α∗1dqs+α∗0dq (3.15)
Fazendo as devidas multiplicações e agrupando os termos semelhantes na equação 3.15 tem-se:
s2+ (aˆdq+pˆ1dqbˆdq)s+pˆ0dqbˆdq=s2+α∗1dqs+α∗0dq
ˆ
p1dq=
α∗1dq−aˆdq
ˆ
bdq
e pˆ0dq= α∗0dq
ˆ
bdq
(3.16)
Fazendo uma analogia com o controlador PI o valor médio de ˆp1dq corresponde a
parte proporcional e o valor médio de ˆp0dq corresponde a parte integrativa do controlador
PI conforme apresentado em [Santos 2007].
O sinal de controlev′′f dqé gerado a partir da equação (3.14) , portanto, é dado por:
˙
v′′f dq=pˆ0dqi∗f dq−pˆ1dqi˙f dq−pˆ0dqif dq (3.17)
A implementação da equação 3.17 pode ser feita do mesmo modo que é implementado um controlador PI:
P= pˆ1dq(i∗f dq−if dq) (3.18)
I=Iant+pˆ0dq(i∗f dq−if dq)h (3.19)
v′′f dq=P+I; (3.20)
Onde,Ianté o valor calculado paraIna iteração anterior ehé o período de amostragem. Comparando as equações 3.18, 3.19 e 3.20 com as do controlador PI, a parcelaPé a parte proporcional eI a integrativa. A principal diferença entre as equações 3.18, 3.19, 3.20 e as do controlador PI é que os parâmetros ˆp1dqe ˆp0dqsão adaptativos.
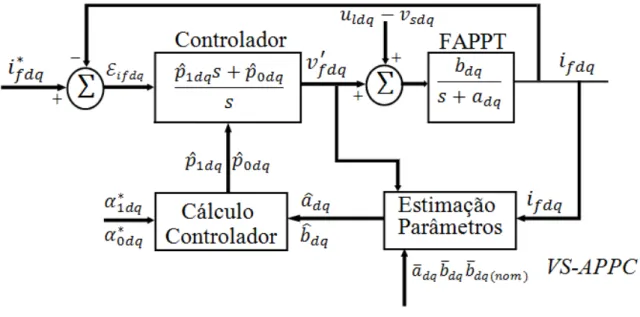
Na Figura 3.2 apresenta-se o diagrama de blocos do VS-APPC aplicado a malha de corrente que é constituido pelos seguintes blocos: controlador, planta, estimador dos parâmetros da planta e cálculo dos parâmetros do controlador. Neste diagrama o erro entre a corrente de referência e a corrente medida na saída da planta é utilizado pelo controlador de corrente; e o sinal de controle é enviado à planta. O erro de estimação e as estimativas dos parâmetros da planta ˆadq e ˆbdq são calculados pelo estimador de
parâmetros. Estes parâmetros por sua vez são utilizados para calcular os parâmetros do controlador ˆp1dqe ˆp0dq.
3.3.2 Projeto do Controlador de Corrente
O projeto do controlador VS-APPC na malha corrente, consiste na determinação dos coeficientes ˆp1dqe ˆp0dq, e teve como base a equação 3.16, ou seja, depende dos valores do
Figura 3.9: Diagrama de blocos doControladorVS-APPC na malha de corrente.
utilizados para as indutâncias da fonte (ls =0,0900mH) e do filtro (lf =0,91mH),
re-sistências da fonte (rs =0,1) e do filtro(rf =0,6) na equação 3.7 é obtido a seguinte
função de transferência da malha de corrente:
If dq(s)
V′′f dq(s)=
1000
s+700 (3.21)
Os critérios de desempenho desejado para o controlador são: percentual de sobre sinal 5% para isso o coeficiente de amortecimento éξ=0.7 e frequência de corte de 1080Hz que corresponde a décima oitava harmônica de um sinal de 60Hz, ou seja, quase cinco vezes menor que a freqüência de chaveamento que é de 5kHz. Portanto, obedece o critério de Nyquist. Para atender esses critérios de desempenho o polinômio escolhido é:
A∗(s) =s2+1527s+1166400
De acordo com a equação 3.16 as estimativas para os parâmetros do controlador VS-APPC são:
ˆ
p1dq=
1527−aˆdq
ˆ
bdq
e pˆ0dq=
1166400 ˆ
bdq
(3.22)
A amplitude dos parâmetros das leis chaveadas ( ¯adq ) e ( ¯bdq) determinam a rapidez
da convergência no processo de adaptação. Contudo, quanto maior for os parâmetros ¯
sistema de controle do FAPPT. O critério de projeto do controlador VS-APPC baseia-se nas seguintes restrições ¯adq>|adq−adq(nom)| e ¯bdq>|bdq−bdq(nom)|. O procedimento
mais utilizado, devido a simplicidade, é escolher os parâmetros nominais próximos aos valores da planta, logo, baseado nessas restrições as amplitudes de ¯adq e ¯bdq deverão ser
maior que a diferença entre os parâmetros do modelo do FAPPT e os nominais. Portanto, os valores escolhidos foramadq(nom)=650, ¯adq=75,bdq(nom)=950 e ¯bdq=120.
3.3.3 Controlador de Tensão do Barramento CC com VS-APPC
O procedimento aqui desenvolvido segue a mesma teoria apresentada na seção an-terior, por isso, alguns passos não seram detalhados. As malhas de corrente possuem dinâmicas muito mais rápidas do que a dinâmica da malha de tensão, para uma avaliação aproximada, estas podem ser desconsideradas. Na figura 3.3 é apresentado o diagrama de controle da malha de tensão.
Observam-se os principais elementos da malha de tensão CC.
Figura 3.10: Diagrama de blocos doControladorVS-APPC na malha de Tensão.
A função de transferência da malha de tensão é dada por:
v′c FdIf d
=
1 τvc
s2+s(τv+rcpc
τvrcpc ) + 1 τvrcpc
= b
s2+sa 1+a0
(3.23)
O pólo introduzido pelo filtro passa-baixa ao modelo do barramento CC é muito maior que o pólo devido o modelo do capacitor, portanto, por ser um pólo dominado o efeito desse pode ser desprezado. Então, pode-se aproximar a função de transferência da malha de tensão dada pela equação 3.23 para uma função de primeira ordem dada por:
v′c ic
=
1
c
s+rcp1c =
b
s+a (3.24)
A(s)desejado
A∗(s) =s2+α∗1s+α∗0=0
Os coeficientes α∗1 e α∗0 determinam o desempenho desejado do sistema em malha fechada. Considerando uma constante arbitrária de projetoam>0, a estimativa da tensão
do barramento CCv′cdo FAPPT pode ser obtida por: ˙ˆ
v′c=−amvˆ
′
c+ (am−aˆ)v′c+biˆ c (3.25)
onde ˆae ˆbsão estimativas paraaeb, respectivamente [Ioannou & Sun 1996]. Então, o erro de estimaçãoe0 é a diferença entre a tensão medida e a tensão estimada conforme
a equação 3.26.
e0f =v
′
c−vˆc (3.26)
Os parâmetros ˆae ˆbsão estimados pelas seguintes leis chaveadas: ˆ
a=−asgn¯ (e0v′c) +a(nom)
ˆ
b=bsgn¯ (e0ic) +b(nom)
(3.27)
Desde que as seguintes restrições sejam satisfeitas ¯a>|a−anom|, e ¯b>|b−bnom|;
bnomo valor nominal debeanomo valor nominal de ¯a[Silva & Araújo 2007].
A lei de controle do VS-APPC é dada por:
Qm(s)L(s)ic=−P(s)(v
′
c−v∗c) (3.28)
Então, determina-se a função de transferência do controlador de tensão como sendo:
Gv=
P(s)
Qm(s)L(s) (3.29)
Onde Qm(s) é um polinômio de grau q e representa o modelo interno da tensão de referênciav∗c, P(s) eL(s)(mônico) são polinômios com grauq+n−1 en−1, respecti-vamente, em quen é o número de pólos da planta a ser controlada. Qm(s) é escolhido para satisfazerQm(s)v∗c =0. Como a função de transferência da malha de tensão é de primeira ordem os polinômios do controlador sãoL(s) =1,Qm(s) =seP(s) =pˆ1s+pˆ0,
os coeficientes ˆp1 e ˆp0 são as estimativas dos parâmetros do controlador e satisfazem a