Sumário
4. TRANSFORMADA DE LAPLACE ... 1
Propriedades da Transformada de Laplace ... 6
Transformada de uma função contínua definida por partes ... 7
Transformada inversa de Laplace. ... 8
A transformada de uma derivada ... 9
Resolvendo EDOs Lineares ... 11
Translação sobre o eixo s ... 17
Teorema: Teorema de translação sobre o eixo s ... 17
A forma inversa do teorema da translação em s... 18
Translação sobre o eixo t ... 25
Função degrau ou função de Heaviside... 25
A derivada de uma transformada ... 38
Transformada de Laplace e função gama ... 39
Lista de Figuras Figura 1 - Representação esquemática da transformada de Laplace _____________________________ 2 Figura 2 - Função contínua por partes (Fonte Dennis Zill) ______________________________________ 8 Figura 3 - Solução de equações diferenciais usando Transformada de Laplace ____________________ 12 Figura 4 - Gráfico do deslocamento no eixo s _______________________________________________ 18 Figura 5 - Gráfico da função degrau unitário _______________________________________________ 26 Figura 6 - Gráfico da função 𝒇𝒕 = 𝟐𝒕 − 𝟑𝒖(𝒕 − 𝟏) __________________________________________ 26 Figura 7 - Deslocamento em t ___________________________________________________________ 27 Figura 8 - a) gráfico da função f t
sen t
, b) gráfico da função f t
sen t u t
2
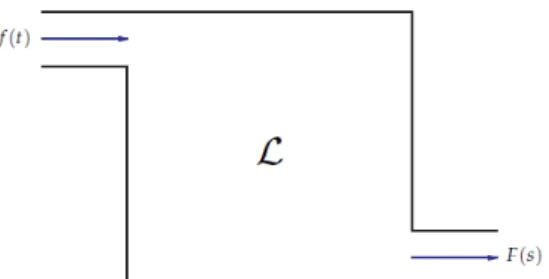
__ 27 Figura 9 - Gráfico da função 𝒇𝒕 = 𝟐 − 𝟑𝒖𝒕 − 𝟐 + 𝒖(𝒕 − 𝟑). __________________________________ 28 Figura 7 - Força eletromotriz ____________________________________________________________ 38 4. TRANSFORMADA DE LAPLACE Introdução E você pode está se perguntando, e o que isto tem haver com equações diferenciais? Nós podemos dizer que tudo, a transformada de Laplace torna mais fácil a resolução de equações diferenciais lineares com coeficientes constantes:
0 ... n n a y a yg x (1) Em que, por exemplo, a função independente g x
não é contínua. Nesta aula estudaremos todo o fundamento teórico necessário de como aplicar a transformada de Laplace na resolução de equações diferenciais ordinárias.4.1. Definição e exemplos
A transformada de Laplace foi encontrada muito antes de Laplace nos trabalhos de Euler. Nesta seção, vamos examinar um tipo especial de transformação integral chamada transformada de Laplace, a qual tem várias propriedades utilizadas na resolução de problemas lineares e valor inicial.
Antes de darmos a definição de transformada de Laplace, relembraremos o conceito de funções contínuas por partes, uma vez que esse conceito será necessário para descrevermos o conjunto em que a transformada de Laplace existe.
A transformada de Laplace transforma uma ED em uma equação algébrica. Será primeira feita uma analogia com as derivadas, podemos dizer que a transformada de Laplace é um operador, neste caso temos a derivada com operador:
3 ' 3 2
dy dx
f x x f x x (2)
A entrada neste caso da Eq. (2) temos uma função de x e trabalhamos com o operador dy
dx e com saída teremos uma derivada. Porém, no caso da transformada de Laplace teremos uma função de entrada, ao trabalhar com o operador de transformada de Laplace o resultado será outra função:
0 TLaplace st
f t F s e f t dt
(3)onde st
e é denominado núcleo. É importante notar que o “s” é tratado como constante
na integração dt. Portanto, quando integra-se resulta em uma função de s. Logo notamos que a transformada é uma integral é linear, teremos a propriedade de linearidade. Todas essas transformações envolvem integrais, muitas vezes são denominadas transformadas integrais de Laplace. Será usado a transformada de Laplace para resolver ED com coeficientes constantes e sistemas dessas equações. O intervalo de interação é [0, ) . Se
f t for definida para t0: Ela resulta em uma simplificação dessas soluções de ED’s,
ou seja:
Figura 1 - Representação esquemática da transformada de Laplace
0
st L f t F s
L f t f t e dt F s
O expoente
st
deve ser adimensional. Será para todo sonde a integral converge. Assim, quando a variável independentet
for tempo, a dimensão de s deve ser oinverso do tempo, isto é, frequência. Neste caso, por ser uma variável complexa, s é
frequentemente denominada “frequência complexa”.
Porque introduzir mais um método? Porém esse método trata muito bem ED’s de
coeficientes constantes e o lado direito não precisa ser contínuo, modela muito bem modelos físicos cuja força externa tem alto impacto instantânea, e também não precisa ser contínua.
Antes de qualquer cálculo precisamos recordar o que é uma integral imprópria, o que é a convergência de uma integral imprópria, ou seja:
0 0 lim b Definição bg t dt g t dt
(5)A integral definida é preciso fazer o limite, a integral converge se existe o limite, caso contrário ela diverge.
01 1 1
1 1 lim lim 0
0 st sb st b b b e e
L e dt
s s s s s
(6)Neste caso precisamos testar o limite para ver se ele existe. Para s0 o limite não existe (é ilimitada). Então, precisa ser maior que zeros0, pois o expoente sbé negativo e sb 0
e quando b. Dessa forma:
1 1 , 0L s
s
(7)
Podemos da mesma maneira verificar o valor da transformada de Laplace de t
t f( ) :
0 0 0 0
st
L t e tdt udv uv vdu
(8)' 0 0 , lim 0 , 0 st st st st b L Hopital s s
u t dv e dt
b
e e
t dt
e
s s
du dt v s e e s s
' 2 2 0 01 1 1
lim 0
0 L Hopital
st st
sb sb bt b
s
e b e
dt
s se e s e s s s
(9)
21
, 0
L t s
s
(10)
0 0 0 0
n st n
L t e t dt udv uv vdu
(11)1 1 1
0 0
, ,
0
n st
st st st
n n n st n
u t dv e dt
e e e n
du nt v t nt dt e t dt
s s s s
(12) 1n n n
L t L t
s
(13)
Dando alguns valores para n:
22 3
2 2 1 2
2, L
n t L t
s s s S
(14)
3 2
3 4
3 3 2 3!
3, L
n t L t
s s s S
(15)
1 ! L n n n t s
(16)
Vamos agora calcular a transformada de uma função exponencial:
3 1 3 0 ) 3 ( 0 ) 3 ( 0 3 3
e e dt e dt es se L t s t s t st
t , 30
s ou s3
E na forma geral essa transformada pode ser obtida como segue:
0 01 1 1
lim lim 0
0
0 , st s a
at st at
t s a b s a
b b
L e e e dt e dt
b
e e
s a s a s a s a s a
s a s a
(17)Neste caso se s a 0, ou seja, negativo não irá existir o limite. No entanto, a expressão é valida para s a 0.
Obs: neste caso se a i também é válido, ocorre à mesma coisa, ou seja:
L af t bg t aL f t bL g t , será usada para calcular o próximo exemplo:
0 0 ) 3 (0 cos2
2 2 .
2
2 e tdt
s s t sen e dt e dt t sen e t sen L st st t s st
0 cos2
2
tdt e
s
st , 0 s 0 , 0 2 cos
lim
e t s
st t
0 0 2 2 2 cos 2 tdt sen e s s t e s st st
sen t
L s s 2 4 2 2 2
Nesse ponto, temos uma equação em L
sen2t
que aparece nos dois lados da igualdade. Resolvendo essa equação obtemos:
4 2 2 2 s t senL , s0
Podemos também resolver as transformadas de funções trigonométricas por soluções da fórmula de Euler:
0
2 2 2 2
cosh cosh
1 1
cosh ,
2
1 1 1 1
cosh
2 2
1 2
st
kt kt kt
kt kt
s k
s k
L kt e ktdt
kt e e L e
s k
L kt L e L e s k
s k s k
s k s k s
s k s k
(18)Obs: Cosh nunca se anula é a soma de duas exponenciais. Notamos que:
2 2 2 2
1 1 1 1
sinh
2 2
1 2
2
kt kt
L kt L e L e
s k s k
k k
s k s k
(19)
Veremos a transformada de seno pela fórmula de Euler:
coskt sinkt
ikt
im
cos sin
cos sin
ikt
função par função par ikt
e kt i kt
kt i kt
(21)
Somadas as duas expressões resultam em:
1 cos
2
ikt ikt
e e
(22)
Se subtraídas tem-se:
1 sin
2
ikt ikt
e e
i
(23)
Essas relações serão utilizadas para calcular as transformadas de seno e cosseno.
2 2 2 2 2 2
1 1 1 1
sin
2 2 2
1 1 2
2 2
ikt ikt ikt ikt i
L kt L e e L e L e
i i i s ik s ik
s ik s ik ik k
i s k i s k s k
(24)
Esse resultado também pode ser obtido usando a definição da transformada de Laplace, assim teremos que usar a integração por partes.
cos
1
12 2
1 1 1 1
2 2
ikt ikt ikt ikt
L kt L e e L e L e
s i k
s ik s ik
s i k
2 2 2 2
s
s k s k
(25)
Propriedades da Transformada de Laplace
A transformada de Laplace é uma transformação linear. Ou seja, dadas as funções f t
e g t
contínuas por partes para t0 e de ordem exponencial e a uma constante, segue que:
L f t g t L f t L g t L af t aL f t
0
0 0
, st
st st
L f t g t e f t g t dt
e f t dt e g t dt L f t L g t
e
0
0
. st
st
L af t e af t dt
a e af t dt aL f t
Essa propriedade é muito útil, pois usando a linearidade da transformada, não precisamos calcular a transformada de toda função:
Exemplo: Calcule a transformada de Laplace da função ( ) 4 3 5 7 2t f t t cos te . Se calcularmos pela definição, temos que resolver a integral:
3 2
0
4 5
( ) st 7 t
L f t e t cos t e dt
Contudo, usando a propriedade de linearidade da transformada esse cálculo é significativamente reduzido quando se conhece a transformada das funções que aparecem na expressão de f . Dessa maneira, temos:
3
24 2
4 +5L 1 +L cos 7 +L
3! 1 1
4 5 , 2
4 (
9 )
2
t
L f t L t t e
s
s
s s s s
Transformada de uma função contínua definida por partes
f(t)L , para
3 ,
2
3 0 , 0 ) (
t t t
f
Figura 2 - Função contínua por partes (Fonte Dennis Zill)
3 3
0
0 ( ) 0 2
)
(t e f t dt e dt e dt
f
L st st st
s e s
e st 3s
3
2 2
0
, s0.
Transformada inversa de Laplace.
Se F s
for a transformada de Laplace da função f t
, então definimos f t
como a transformada inversa de Laplace de F s
e denotamos por L1
F s
. Assim, enunciamos o seguinte:Seja kum número real. Então,
A transformada inversa de Laplace também possui as mesmas propriedades da transformada de Laplace.
Teorema: Sejam F s
e G s
as transformadas das funções f t
e g t
,respectivamente, e a; b constantes, então:
1
1 1 1
1) L é uma transformação linear ;
L aF s bG s aL F s bL G s
1
2) at .
L F s a e f t
1
3) tF s , 0.
Teorema. Seja L f t
F s
, então:
1 n 1 n n 1
n d
L F s t L F s
ds
Exemplo: Calcule 1 2
3 5 L
s
. Observe que 2 2
3 3 5
5 5 5
s s . Assim,
1 1
2 2
3 3 5 3
5
5 5 5 5
L L senh t
s s
Exemplo: Usando frações parcias
Calcule
1 1
3 1
L
s s
. Podemos calcular essa transformada começando por decompor a expressão racional
s3
1s1
como soma de duas funções racionais, cujaa transformada é conhecida. Para isso, a técnica de frações parciais, será muito útil. Vamos recordá-la um pouco. A idéia é achar constantes A e B tais que:
3
1 1
3
1
A B
s s s s
Multiplicando ambos os lados da igualdade acima por
s3
s1
e igualando os coeficientes de mesma potência em s, obtemos 1; 14 4
A B .Assim,
3
1 1 1 1 1 1 1 1 1 1 1
3 1 4 3 4 1 4 3 4 1 4 4
t t
e e
L L L L
s s s s s s
A transformada de uma derivada
Antes de resolvermos equações diferenciais precisaremos obter expressões para, por exemplo, a transformada das derivadas. Assim, nesta seção, estudaremos a transformada de derivadas. Observe que se '
' ' ' 0 0 0 0 0 0lim lim 0
0
sb cb sb
b s c sb
dv st st
st u b
st st bt st
b b
e f b Me e
L f t e f b Me
b se s c é igual a
u e du se dt
L f t e f t dt uv vdu
dv f t dt v f t
e f t s e f t dt e f b e f s e f t dt
f sL
f t
sF s
F
0(26)
f(t) F(s)L
'( ) ( ) (0) F s sF t fL
Onde F s
L f t
(no cálculo acima assumimos que estf t
0 quando t). Usamos da Eq. (26) e procedendo de maneira análoga, obtemos:
'' 2 '
''' 3 2 '
0 0
0 0
L f t s F s sf f
L f t s F s s f s sf f
(27)
Teorema: Se , ,...,' n 1
f f f forem contínuas em [0, ) e de ordem exponencial, e se n
f t for contínua por partes em [0, ) , então:
n
n
n 1
n 2 '
0 ... n 1
0L f t s F s s f s s f f (28) Onde F s
L f t
.O exemplo a seguir representa a transformada caso a '
f é contínua por partes, ou seja:
1 1
' ' 0 0 lim lim i i t b n st st b b i t
e f t dt e f t dt
(29)Novamente preciso fazer a integral por partes, onde a ideia é particionar a integral
1 1 1 i i st t st t e f te f t
0 2 0 2 st st
e f t e f t
est1f t 1 est2f t 2
3 3 1 1 ... st
stn stn
n n
e f t e f t e f t
1 1 0 i i i t n st i i tse f t dt
(30)Os limites pela esquerda e pela direita f t 1 e f t 1 são iguais por isso podem ser
1 1 00 0 0
0 0 1 0 0 i i i i i st tnb
st stn sb
n t t n t st st i t i t
s e f t dt e f t e f t f e f b
e f t se f t dt
(31)Teremos a mesma reposta, porém, é preciso dividir o intervalo. Assim, temos o seguinte teorema para f t
contínua por partes
1
1 1
0 st
f e f t f t esta medindo a descontinuidade no t1 é o salto que a função dá e assim posso escrever todas as somas, considerando que t0 ou posso ter finitos pontos:
1 21 1 2 2
' 1 0 ... L 0 i i st st j t st i i
f e f t f t e f t f t
f t sL f t f e j t
(32)Resolvendo EDOs Lineares
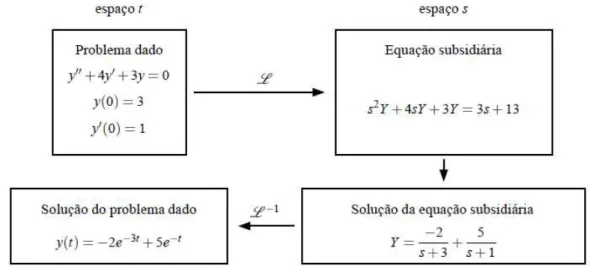
Fica evidente com base no resultado geral dado no teorema anterior que
n n dt y d
L depende de Y(S)L
y(t) e das 𝑛 − 1 derivadas de y(t) calculadas em 𝑡 =0. Essa propriedade torna a transformada de Laplace idealmente adequada para a resolução de problemas lineares de valor inicial nos quais a equação tem coeficientes constantes.
1
1 1 0
1 '
0 1 1
...
0 , 0 ,..., 0 ,
n n
n n n n
n
n
d y d y
a a a y g t
dt dt
y y y y y y
(33)
onde ,ai i0,1,...,ney0,y1,...,yn1 são constantes. Pela linearidade, a transformada de Laplace dessa combinação linear é uma combinação linear de transformadas de Laplace:
1
1 1 ... 0
n n
n n n n
d y d y
a L a L a L y L g t
dt dt
(34)
1 1
2
1 2
1
0
0 ... 0
0 ... 0
...
n
n n
n
n
n n
n
a s Y s s y y
a s Y s s y y
a Y s G s
(35)
Onde L
y(t) Y(S) e L
g(t) G(S). Em outras palavras, a transformada de Laplace de uma equação diferencial linear com coeficientes constantes torna-se uma equação algébrica Y(S). Se resolvermos a equação geral transformada para determinar o símbolo Y(S), obtemos primeiramente P(S)Y(S)Q(S)G(S)e então escrevemos:) (
) ( ) (
) ( ) (
S P
S G S P
S Q S
Y
Onde 1 0
1
)
(S a S a S a
P n n
n
n
é um polinômio em sde grau menor ou igual a 1
n , que consiste nos vários produtos dos coeficientes ai, i0,1,...,n e das condições iniciais prescritas y0,y1,...,yn1, e G(S)é a transformada de Laplace de g(t).
Figura 3 - Solução de equações diferenciais usando Transformada de Laplace
Exemplo 1: Dada uma ED usar a transformada de Laplace, em uma equação simples, neste caso temos um método fácil de resolver pela equação característica:
'' '
'
6 0
0 2
0 1
x t x t x t x
x
'' ' '' ' 2 ' 2 2 2 6 0 6 00 0 0 6 0
6 2 1 2 0
6 2 3
2 3
6 x t x t x t
L x t L x t L x t
s X s sx x sX s x X s
s X s sX s X s s
X s s s s
s X s s s
Preciso saber quem é o x t
, devido a unicidade teremos a inversa, ela esta bem definida, ou seja, será feiro a inversa. Primeiramente precisamos tentar decompor o denominador para encontrar formas que já existam de forma direta as transformadas.
2
2 3 2 3
2 3 3 2
6
2 3 2 3
2 7 3
5 7 ;A
2 3 3 5 5
s s A B
X s
s s s s
s s
A s B s s
A B B B A B
O que resulta em:
22 3
2
3
3
1
7
1
2 3 5 3 5 2
6
s s
X s
s s s s
s s Ou seja,
1 1 3 23 1 7 1
5 3 5 2
3 7
5 5
t t
x t L L
s s
x t e e
Neste caso não faz sentido resolver o PVI com transformada de Laplace, com poucas linhas seria resolvido pelo método de coeficientes constantes, porém foi utilizado por fins didáticos.
Exemplo 2: Dada uma ED usar a transformada de Laplace para resolver:
''' 6 '' 11 ' 6 1
'' 0 0 ' 0 0
0 0
y t y t y t y t
Essa resolução por fins didáticos será realizada por etapas: Etapa 1: Aplicação da transformada de Laplace
''' 6 '' 11 ' 6 1
L y t L y t L y t L y t L
3 2 0 ' 0 '' 0 6 2 0 ' 0
1
11 0 6
s Y s s y sy y s Y s sy y
sY s y Y s
s
3 21
1
1 2 3
6 11 6
Y s
s s s s
s s s s
Etapa 2: Expansão por frações parciais
1 2 3
A B C D
Y s
s s s s
1 1 1 1
; ; ;
6 2 2 6
A B C D
1
1
1
1
6 2 1 2 2 6 3
Y s
s s s s
Etapa 3: Aplicar a transformada inversa de Laplace
1 1 1 1 1
1
1 1
1
1 1
1
6 2 1 2 2 6 3
y t L L L L
s s s s
1 1 1 2 1 36 2 2 6
t t t
y t e e e
Exemplo 3: Dada uma Edo resolva usando a TL, este caso para a transformada inversa teremos que usar a translação em s.
'' ' 2
'
3 2 4
0 3
0 5
t
y t y t y t e
y y
Neste caso teremos que usar o teorema da inversa da translação em s, dado pela Eq.(36), ou seja:
1 1
1 1 2
2 2
1 1
2
at s s a
t s s a
L F s a L F s e f t
L L e t
s s
Exercícios
1 - Resolva a Ed com condições iniciais:
'' sin 2 t
) ' 0 1
0 2
y t y t a y
y
0 ''' 0 0 b) '' 0 0
' 0 1
0 0
IV
y t y t y
y y y
'' 4 sin 3
) ' 0 0
0 0
x t x t t
c x x
d) Ache a solução do P.V.I.
'' 4 3, 0 0, ' 0 0
y y y y
Solução:
3 3cos 2 4 4y t t
Translação sobre o eixo s
O cálculo de transformadas tais como
5 3t e
L t e L
e2tcos4t
é direto desde que conheçamos
3L t e L
cos4t
. Em geral quando conhecemos a transformada de Laplace de uma função 𝑓, L
f(t) F(s), é possível computar a transformada de Laplace de um múltiplo exponencial de 𝑓, isto é, L
eatf(t)
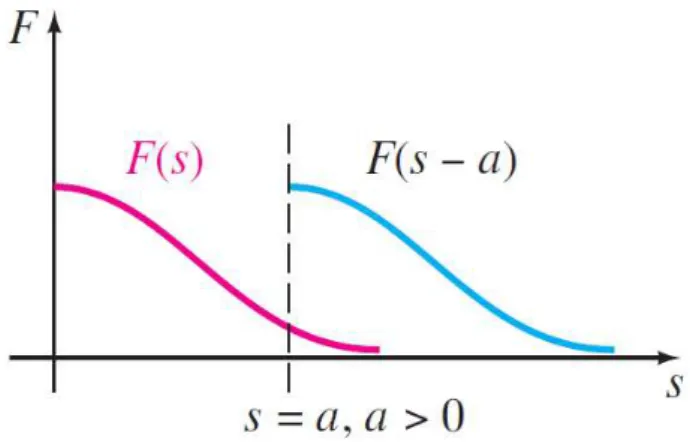
, sem nenhum esforço.Teorema: Teorema de translação sobre o eixo s
Se L f t
F s
e a for um número real qualquer, então:
at
L e f t F sa
Demonstração:
Pela definição de transformada, temos que:
0 0
s a t at st at
L e f t e e f t dt e f t dt F s a
Se considerarmos 𝑠 uma variável real, o gráfico de 𝐹(𝑠 − 𝑎) será o gráfico de
Figura 4 - Gráfico do deslocamento no eixo s
Para enfatizar, é às vezes proveitoso usar o simbolismo:
at
s s a L e f t L f t
Exemplo 1: Calcule a transformada
5 3t L e t .
5 3 3
4 56 5 t
s s L e t L t
s
Exemplo 2: Calcule a transformada
2tcos 4
L e t .
2
2 2
2
cos 4 cos 4
2 16
t
s s
s
L e t L t
s
A forma inversa do teorema da translação em s
As transformações geralmente precisam ser ajustadas pelas frações parcias e a transformada inversa resulta em:
1 1 at
s s a
L F s a L F s e f t (36)
Exemplo 3: Calcule a transformada inversa 1 2
2 3
4 20 s L
s s
. Aqui tentaremos usar a
2 2 2 2 22 2 7
2 3 2 3
4 20 4 16 4 16
2 2
2 7 4
1 4 16 4 4 16
s
s s
s s s s
s s s
Como, pela propriedade de translação, temos que:
1 2 2 2 cos 4 2 16 t sL e t
s e
1 2 2 4 4 2 16 tL e sen t
s
Fica fácil ver que:
1 2 4
2
2 3 7
2 4 4
4 20 4
t t
s
L e sen t e sen t
s s
Exercícios
a) Calcule a transformada inversa de
1 2 2 5 3 s L s : usando frações parciais teremos:
1 3 3
2 2 5 2 11 3 t t s
L e e t
s
b) Calcule a transformada inversa de 1 2 5 2 3 4 6 s L s s
3tcos 2 3t 2 e t e sen t
2 2 1 1 2 22 10 2 10
)
2 5 1 1 4 1
s s s s
c L L
s s s s s
Solução:
'' 2 ' 5 8 )
0 2; ' 0 12
t
y y y e
d
y y
Aplicando a transformada de Laplace tem-se:
Chegamos ao mesmo resultado do exemplo c.
Exemplo 5: Usar a transformada de Laplace para resolver o PVI
' 2 3
'
'' 6 9
0 2, 0 17
t
y t y y t t e
y y
Decompondo em frações parciais,
Exemplo 6:
'
'
'' 6 34 0
0 3, 0 1
x t x x t
x x
Exemplo 7:
'
'
'' 6 34 30sin 2
0 0, 0 0
x t x x t t
x x
Exemplo 8: Ache a solução do PVI usando as transformadas de Laplace:
'' ' 2
'
4 13 2 3 cos
0 0
0 1
t
y y y t e t
y y
Tomando a transformada de Laplace de ambos os lados desta equação e aplicando as condições iniciais dadas, obtemos:
2
2 2
3 2
2
1 4 13
2 9
s
s F s sF s F s
s s
,
onde F s
L y t
. Assim,
22 2 2 2
3 2
1 2
4 13 4 13 4 13
s F s
s s s s s s s
Agora, devemos achar a transformada inversa de cada termo da soma acima, comecemos pelo primeiro termo.
22
1 1 1 3
4 13 2 9 3 2 9
s s s s Logo,
1 2
2
1 1
3
4 13 3
t
L e sen t
s s
Para o segundo membro da soma, usamos frações parciais:
2 22 2
2
4 13 4 13
A B Cs D
s s s s
s s s
Resolvendo a igualdade acima, obtemos 8 ; 2 , 8 , 6
169 13 169 169
A B C D .
Portanto,
2 2
2 2
2 2
2
2 8 1 2 1 1 8 6
169 13 169 4 13
4 13
8 1 2 1 1 2 10 3
169 13 169 2 9 3 169 2 9
s
s s s s
s s s
s
s s s s
,
1 2 2
2 2
2 8 2 8 10
cos3 3
169 13 169 507
4 13
t t
L t e t e sen t
s s s
E, finalmente a terceira soma pode ser vista como:
2
2 2
23 2 3 1 1 3
2 4 13 2
4 13 2 9
s d d
ds s s ds
s s s
Portanto, pelo Teorema 11.6 e pelo item 2 do Teorema 11.5, segue que :
1 2
2 2
3 2 1
3 2
4 13
t s
L te sen t
s s Portanto,
2 2 2 2
2 2 2
1 8 2 8 10 1
3 cos3 3 3
3 169 13 169 507 2
179 8 1 2 8
3 cos3 3
507 169 2 13 169
t t t t
t t t
y t e sen t t e t e sen t te sen t
y t e sen t e t te sen t t
Exercícios
1 - Resolva as Edo’s com condições iniciais:
'' 4 ' 6 1
) ' 0 0
0 0
t
y t y t y t e
a y y 2 2
1 1 1 2
( ) cos 2 2
6 3 2 3 2
t t t
y t e e t e sen t
2
'' 4 ' 4
b) ' 0 0
0 0
y t y t y t t
y y
0 ' '' sin )0 0, 0 0
x t x t F t
4
3
2 '' 4
)
0 '' 0 ' 0 0 0
t
y t y t y t te
d
y y y y
'
'
'' 6 34 0
)
0 3, 0 1
x t x x t
e
x x
'
'
'' 6 34 30sin 2
)
0 0, 0 0
x t x x t t
f
x x
Resposta:
5
2cos 2 5 2
2 3
5cos5 2 5
29 29
t
x t t sen t e t sen t
g) Ache a solução do PVI usando as transformadas de Laplace:
'' ' 2
'
4 13 2 3 cos
0 0
0 1
t
y y y t e t
y y
Solução:
179 2 3 8 2 cos3 1 2 3 2 8507 169 2 13 169
t t t
y t e sen t e t te sen t t
Translação sobre o eixo t
Nas engenharias são frequentemente encontradas funções que pode ser “ligadas” e “desligadas”. Por exemplo, uma força externa agindo sobre um sistema mecânico ou
uma voltagem sendo aplicada a um circuito elétrico que pode ser desligada a certo período. Essa função é muito importante porque ela descreve funções descontínuas, ou contínuas por partes mais simples. Para trabalhar com esse tipo de processos vamos introduzir a função de Heaviside.
Função degrau ou função de Heaviside
Definição: uma função é contínua por partes em I se existe uma partição de I
0; i
limites laterais lim
i
tp f t e tlimpi f t
são finitos.É conveniente então definir uma função especial que seja número 0 (desligada) até um determinado tempo 𝑡 = 𝑎 e número 1 (ligada) após esse tempo.
0 01 a
se t a
u t a u t
se t a
(37)
Como Laplace trabalha com t>0 o gráfico da função de Heaviside é:
Figura 5 - Gráfico da função degrau unitário
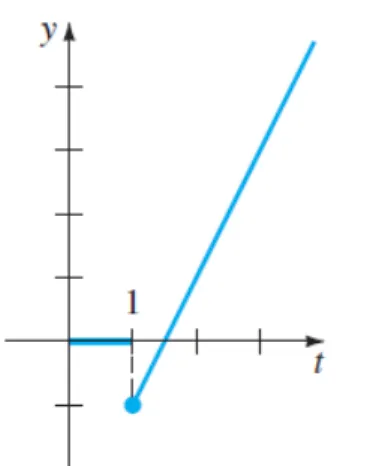
Quando uma função 𝑓 for multiplicada por 𝑢(𝑡 − 𝑎), a função degrau unitário
“desliga” uma parte do gráfico dessa função. Por exemplo, considere a função
𝑓(𝑡) = 2𝑡 − 3. Para desligar a parte do gráfico de 𝑓 sobre o intervalo 0 ≤ 𝑡 < 1, simplesmente tomamos o produto (2𝑡 − 3)𝑢(𝑡 − 1). Em geral, o gráfico de
𝑓(𝑡)𝑢(𝑡 − 1)é “desligado” para 0 ≤ 𝑡 < 𝑎 e “ligado” para 𝑡 ≥ 𝑎.
Figura 6 - Gráfico da função 𝒇(𝒕) = (𝟐𝒕 − 𝟑)𝒖(𝒕 − 𝟏)
Em um outro ponto de vista podemos afirmar que quando multiplicamos uma
Figura 7 - Deslocamento em t
Exemplo 1:
2
0 0
2 ,
2
0 0
2sen 2 sen 2
se t se t
f t sen t u t uma vez que u t
t se t t se t
Representação gráfica:
Figura 8 - a) gráfico da função f t
sen t
, b) gráfico da função
2
f t sen t u t
A função degrau unitário Eq. (37) também pode ser usada para descrever funções definidas por partes em uma forma compacta. Por exemplo, se considerarmos os intervalos 0 ≤ 𝑡 < 2, 2 ≤ 𝑡 < 3 e 𝑡 ≥ 3 e os valores correspondentes de 𝑢(𝑡 − 2) e
Figura 9 - Gráfico da função 𝒇(𝒕) = 𝟐 − 𝟑𝒖(𝒕 − 𝟐) + 𝒖(𝒕 − 𝟑).
Da mesma forma, uma função definida por partes do tipo:
a t t h
a t t
g t f
), (
0 ), ( ) (
É idêntica a 𝑓(𝑡) = 𝑔(𝑡) − 𝑔(𝑡)𝑢(𝑡 − 𝑎) + ℎ(𝑡)𝑢(𝑡 − 𝑎) Analogamente, uma função do tipo:
b t
b t a
a t t
g t f
0
, 0
), (
, 0 ) (
Pode ser escrita como: 𝑓(𝑡) = 𝑔(𝑡)[𝑢(𝑡 − 𝑎) − 𝑢(𝑡 − 𝑏)]
Uma forma alternativa e descomplicada de escrever a função de Heaviside é multiplicar a parte da 𝑓(𝑡) pelas funções de Heavise que representam a região onde está é ligada ou desligada. Por exemplo a figura 9 representa um gráfico de uma função com três partes.
3 3 2
2 0
, 0
, 1
, 2 ) (
t t t t
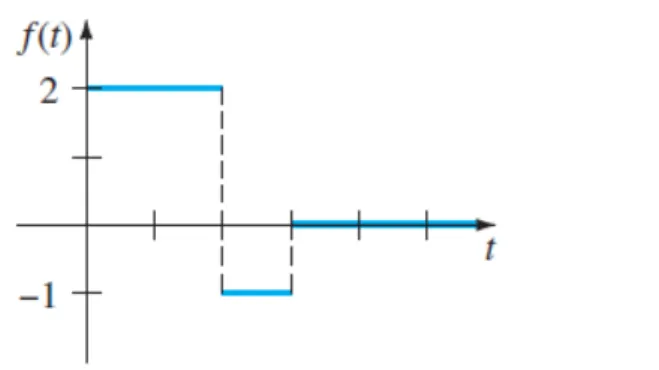
f .
A 𝑓(𝑡) é composta pela seguinte soma:
𝑓(𝑡) = 2[𝑢(𝑡 − 0) − 𝑢(𝑡 − 2)] − 1[𝑢(𝑡 − 2) − 𝑢(𝑡 − 3)] + 0[𝑢(𝑡 − 3)]
Desta forma 𝑓(𝑡) = 2 − 3𝑢(𝑡 − 2) + 𝑢(𝑡 − 3)
Com base nesse conceito, podemos ter outras aplicações práticas; observe abaixo:
Imagine que você tenha que restringir o intervalo da sua função; podemos usar a função pulso; basta multiplicar a função pela função pulso.
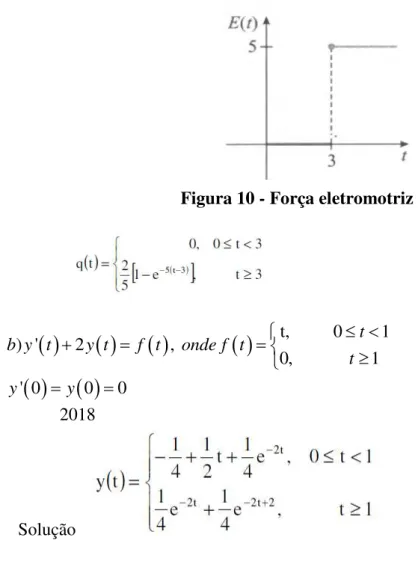
Exemplo 2: A voltagem em um circuito é dada por uma função definida por partes:
20 , 0 5 0, 5t se t E t
se t
(38)
Lembrando que é essa função que precisamos definir, então teremos que a função degrau é
5
0, 0 51, 5
se t
u t
se t
podemos expressar a Eq. (38) como:
Resp: E t
20t20t u t
5
Considere uma função genérica 𝑦 = 𝑓(𝑡) definida para 𝑡 ≥ 0. A função definida por partes
a t a t f
a t a
t u a t f
), (
0 , 0 )
( ) (
desempenha um papel significativo
Veremos agora como calcular a transformada de Laplace desse tipo de função: Segundo teorema da Translação
Se 𝐹(𝑠) = 𝐿{𝑓(𝑡)} 𝑒 𝑎 > 0, então
f t a u(t a)
e F(s)Observe abaixo a demonstração do teorema em que colocamos a função f (t) = f (t - a) u (t - a) e achamos a transformada de Laplace (lembrando que u (t - a) é igual a 1
para t ≥ a, e criamos uma variável x = t - a para isolar "t" e integramos em função de x):
Prova:
Pela propriedade aditiva das integrais,
f t a u t a
e f t a u t a dtL ( ) ( ) st ( ) ( )
0
Pode ser escrita como soma de duas integrais:
f t a u t a
e f t a u t a dt e f t a u t a dt e f t a dtL st
a t para um a
st a
t para zero a st
) ( )
( ) ( )
( ) ( )
( ) (
0 _
_ 0
_ _
0
4 4 3 4 4 4 2 1 4
4 3 4 4 4 2 1
Agora se fizermos na última integral 𝑣 = 𝑡 − 𝑎, 𝑑𝑣 = 𝑑𝑡, então:
( ) ( )
( ) ( )
( )0 0
) (
t f L e dv v f e e dv v f e a
t u a t f
L
sva as
sv svExemplo 4: Calcule as transformadas de Laplace: a) 𝑓(𝑡) = (𝑡 − 2)3𝑢(𝑡 − 2)
b) 𝑓(𝑡) = 𝑠𝑒𝑛ℎ(2𝑡 − 4)𝑢(𝑡 − 2)
c) 𝑓(𝑡 − 𝑎) = 1 d)
RESOLUÇÃO:
a) Observe que a forma de deslocamento da função e do degrau unitário são iguais, (t - 2). Basta aplicar diretamente a fórmula (usamos a tabela de transformada de Laplace, item 19).
b) Temos que manipular matematicamente a função para colocar a função senh (2t - 4) na mesma forma de deslocamento u (t - 2). Usamos o item 6 da tabela de transformada de Laplace.
c) Basta substituir na fórmula f(t - a) = 1. Usamos a tabela de transformada de Laplace item 1.
d) Observe que o gráfico é uma função por partes para explicar como definimos a função por partes de forma compacta dividirei o gráfico em 3 funções (f1(t) = 2, f2(t) =
Para montar o intervalo com funções definidas por partes, basta somar as funções usando afunção pulso nos respectivos intervalos. Obtemos a função:
f(t) = f1(t) [u (t - a) - u (t - b)] + f2(t) [u (t - a) - u (t - b)]
Substituindo os valores das funções, obtemos (u(t), para t ≥ 0, é igual a 1): f(t) = 2 [u (t - 0) - u (t - 2) + -1 [u (t - 2) - u (t - 3)] ---> f(t) = 2 u(t) - 2 u (t - 2) + (-1) u (t - 2) - (-1) u (t - 3) --->
f(t) = 2 - 2 u (t - 2) - 1 u (t - 2) + 1 u (t - 3) ---> f(t) = 2 - 3 u (t - 2) + u (t - 3)
Calculando a transformada de Laplace (Obtive a transformada inversa consultando a tabela de transformada de Laplace):
Achamos a função; Temos que colocar a função (2t - 3) na mesma forma de deslocamento u(t - 1). Observe que podemos escrever -3 como - 3 = -2 - 1. Observe abaixo a resolução; usamos atabela de transformada de Laplace itens 1 e 2.
Exemplo 5: A figura é representada pela seguinte equação
2 3
2
3
f t u t u t , ou seja:
0, 0
- - - ,
0, t a f t g t g t u t a h t u t a g t a t b
t b
Obs: precisa ser cuidado quem é o a da função degrau com o da função a ser transformada.
Ela é muito importante porque outras funções descontínuas ou contínuas por partes podem ser descritas pela função degrau. De maneira geral podemos fazer a transformada dessas funções de forma alternativa, ou seja:
( )
0 0
st s u a
L g t u t a e g t dt e g u a du
(40)Isto é,