UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA CAMPUS DO PICI
ADISMAEL DE SOUZA PINHEIRO
CONTROLE ROBUSTO LMI/ APLICADO A UM GERADOR EÓLICO DFIG
ADISMAEL DE SOUZA PINHEIRO
CONTROLE ROBUSTO LMI/ APLICADO A UM GERADOR EÓLICO DFIG
Trabalho de Conclusão de Curso apresentado ao Departamento de Engenharia Elétrica da Universidade Federal do Ceará, como requisito parcial para obtenção do Título de Graduado em Engenharia Elétrica. Área de concentração: Controle Multivariável.
Orientadores:
Prof. Dr. Fabrício G. Nogueira Prof. Dr. José Carlos Teles
P718c Pinheiro, Adismael de Souza.
Controle robusto LMI/H aplicado a um gerador eólico dfig / Adismael de Souza Pinheiro. – 2016. 102 f. : il. color.
Trabalho de Conclusão de Curso (graduação) – Universidade Federal do Ceará, Centro de Tecnologia, Curso de Engenharia Elétrica, Fortaleza, 2016.
Orientação: Prof. Dr. Fabrício Gonzalez Nogueira. Coorientação: Prof. Dr. José Carlos Teles.
1. Energia eólica. 2. Controle robusto. 3. Gerador de indução duplamente alimentado. 4. Desigualdades matriciais lineares. I. Título.
AUTOR: ADISMAEL DE SOUZA PINHEIRO
CONTROLE ROBUSTO LMI/ APLICADO A UM GERADOR EÓLICO DFIG
Trabalho de Conclusão de Curso apresentado ao Departamento de Engenharia Elétrica da Universidade Federal do Ceará, como requisito parcial para obtenção do Título de Graduado em Engenharia Elétrica. Área de concentração: Controle Multivariável.
Aprovado em: 28 / 11 / 2016.
BANCA EXAMINADORA
________________________________________
Prof. Dr. Fabrício G. Nogueira
Universidade Federal do Ceará (UFC)
________________________________________ Prof. Msc. Marcus Vinícius Silvério Costa Universidade Federal Rural do Semi-Árido (UFERSA)
________________________________________ Prof. Msc. Samuel Vieira Dias
AGRADECIMENTOS
Aos Profs. Dr. Fabrício G. Nogueira e Dr. José Carlos Teles, pela excelente orientação.
Aos professores participantes da Banca examinadora pelo tempo pelas valiosas colaborações e sugestões.
“No matter how tall the mountain, it cannot
RESUMO
Este trabalho apresenta a investigação de uma estratégia de controle robusto baseada em desigualdades matriciais lineares (LMI) aplicada no controle de um gerador eólico DFIG (Douby Fed Induction Generator) e no controle de um conversor de potência usado na alimentação do rotor do DFIG. Na região Nordeste e particularmente no Ceará, estão sendo instalados parques com turbinas eólicas modernas que utilizam o DFIG para geração de energia elétrica, sendo esta uma das motivações para realização deste estudo. Este trabalho apresenta também os conceitos de otimização via norma , e faz uma comparação com resultados obtidos através do controle com controladores industriais do tipo PI. Primeiramente, modelou–se o sistema turbina eólica – gerador para obtenção de um modelo linearizado do sistema, a partir do modelo base, estudou–se a estratégia de controle clássica, controle PI, e os controladores multivariáveis e LMI, por fim, aplicou–se o controle robusto objetivando um melhor desempenho em termos de regime permanente e robustez do sistema. As estratégias de controle usadas asseguraram a robustez em relação às variações paramétricas no modelo e garantiram um erro estático aproximadamente nulo. O modelo e as teorias apresentados neste trabalho foram validados através de simulações usando o software MATLAB/Simulink, demonstrando o bom desempenho e robustez dos controladores propostos.
ABSTRACT
This work presents the design of a robust control strategy based on linear matrix inequalities (LMI) applied to the control of a wind generator DFIG (Douby Fed Induction Generator) and the control of a power converter used in DFIG rotor power supply. In northeast of Brazil and especially in Ceará region, they are being installed parks with modern wind turbines using the DFIG to generate electricity, which is one of the motivations for this study. This work also presents the optimization concepts via norm, and makes a comparison with results obtained from the control with industrial controllers PIs. Firstly, the wind turbine/generator system is modelled for obtaining a linear system model, from the basic model, we studied the classical strategy of control, PI control, and the multivariable controller LMI and norm, finally, it was applied the robust control aiming a better performance in terms of steady state and system robustness. The control strategies used ensured robustness in relation to parametric variations in the model and secured approximately a zero static error. The model and theories presented in this paper have been validated through simulations using MATLAB/Simulink software, demonstrating good performance and robustness of the proposed controllers.
SUMÁRIO
1 Introdução ... 16
1.1 Objetivo do trabalho ... 16
1.2 Organização do trabalho ... 17
2 Sistemas de geração eólica ... 18
2.1 Energia eólica ... 18
2.2 Tecnologias para turbinas eólicas ... 19
2.3 Modelo da turbina eólica ... 21
2.4 Tecnologias para turbinas eólicas ... 24
3 Modelo da máquina de indução ... 28
3.1 Modelo no sistema de referência com velocidade arbitrária ... 29
3.2 O modelo no sistema de referência síncrono ... 31
3.3 Princípio do controle vetorial ... 36
3.4 Máquinas de Indução Duplamente Alimentada ... 37
3.4.1 Fluxo de potência em regime permanente ... 38
3.4.2 Orientação do fluxo ... 38
3.4.2.1 Orientação do fluxo do rotor ... 39
3.4.2.2 Orientação do fluxo do estator ... 40
3.4.3 Topologia do sistema de geração ... 41
3.5 Controle do conversor do lado da máquina ... 44
3.6 Modelagem do conversor CA/CC conectado à rede ... 45
3.7 Linearização do modelo ... 47
4 Estratégia clássica de controle ... 51
5 Tópicos sobre LMIs aplicadas à teoria de controle ... 55
5.1 Introdução às LMIs ... 55
5.2 Conjuntos convexos ... 55
5.3 Resolução de LMI ... 57
5.3.1 Complemento de Schur ... 57
5.4 Norma de Sistemas ... 58
5.4.1 Determinação da Norma subótima ... 60
5.4.2 Caráter LMI da norma ... 60
6 Estudo do controle ... 62
6.1 Esquema de controle em malha fechada ... 62
6.2.1 Margem de módulo ... 62
6.2.2 Banda Passante ... 63
6.2.3 Precisão ... 64
6.2.4 Rejeição à perturbações ... 64
6.2.5 Efeito do ruído ... 64
6.2.6 Robustez ... 65
6.3 Esquema de análise e síntese de ... 65
6.3.1 Apresentação do problema ... 65
6.3.2 Estudo assintótico ... 66
6.4 Esquema geral de síntese do controlador ... 67
6.4.1 Esquema de um bloco (um critério de desempenho) ... 68
6.4.2 Esquema com dois blocos ... 69
6.5 Lugar dos polos ... 70
6.5.1 Região LMI ... 70
6.5.2 Condições LMI ... 70
6.6 Síntese para sistemas LTI ... 71
6.6.1 Realimentação de estado via LMI ... 71
6.6.2 Controle ... 71
6.6.2.1 Definição do problema ... 71
6.6.2.2 Resolução por LMI ... 72
7. Resultados das Simulações ... 74
7.1 Resolução LMI ... 74
7.2 Resolução a partir do método apresentado em 6.4 ... 81
7.3 Controle clássico PI ... 85
7.4 Resultados das simulações com o sistema não linearizado ... 88
8. Conclusões ... 96
REFERÊNCIAS BIBLIOGRÁFICAS ... 98
ANEXO 1 – CONCEITOS DE ESTABILIDADE PARA LYAPUNOV ... 100
ANEXO 2 – LINEARIZAÇÃO DE SISTEMAS DINÂMICOS ... 101
1
Introdução
Fontes de energia renováveis têm o maior potencial energético dentre todas as fontes de geração elétricas conhecidas, com um baixo impacto ambiental, disponíveis globalmente e juntamente com os subsídios governamentais apresentam atualmente um preço competitivo. Dentre as fontes de energias renováveis, destaca–se o progresso das pesquisas e o desenvolvimento das tecnologias da geração de eletricidade a partir do vento, o que possibilitou a geração de forma eficiente resultando em um alto grau de segurança no retorno do investimento. A geração eólica poderá reduzir progressivamente a utilização de carvão mineral, petróleo, gás natural e energia nuclear.
Dentre as máquinas utilizadas destaca–se o Gerador de Indição Duplamente Alimentado DFIG (Doubly Fed Induction Generator), esta máquina pode ser usada como motor ou gerador elétrico, seu diferencial é poder ser alimentada pelo estator e pelo rotor, facilitando o ajuste da frequência do rotor e o controle da velocidade [17].
Dentre as estratégias de controle utilizadas destaca–se o estudo das Desigualdades Matriciais Lineares LMIs (Linear Matrix Inequalities) apresentados por Boyd et al.(1994), Gahinet et al(1995). Eles abordam os conceitos fundamentais das LMIs e seu uso em situações que mostram a necessidade de restrições matemáticas. Já o trabalho de Gahinet mostra os conceitos de LMIs aplicados à programação semi-definida, além disso, abordam os teoremas de estabilidade de Lyapunov, complemento de Schur e a teoria de D – estabilidade através do LMI Control Toobox, que é uma ferramenta computacional do MATLAB capaz de resolver problemas via LMIs. Este trabalho apresenta as topologias mais comumente aplicadas em geração eólica, realiza a modelagem completa de uma planta que usa o gerador de indução duplamente alimentado, faz um estudo dos controladores clássicos usados no controle de plantas eólicas e aplica os controladores robustos LMI e no controle do DFIG e do conversor de potência.
1.1
Objetivo do trabalho
análise dessas estratégias foram considerados: sensibilidade às perturbações na medição, sensibilidade às variações nos parâmetros, tempo de resposta, erro estático, oscilações e sobressalto nos transitórios. Como objetivos complementares e necessários para conclusão deste trabalho destacam–se:
Elaborar um modelo matemático confiável para estudo do sistema de geração eólica; Avaliar a resposta dos controladores clássicos usualmente empregados no controle do
DFIG e compará-la às respostas dos controladores LMI e ;
Avaliar as limitações dos controladores frente às variações paramêtricas do modelo; Verificar, através de simulações, a coerência do modelo e avaliar os resultados.
1.2
Organização do trabalho
2
Sistemas de geração eólica
2.1 Energia eólica
Nas ultimas décadas a utilização de energia eólica cresceu substancialmente como consequência do crescimento da demanda por energia elétrica. O uso contínuo de combustíveis fósseis na matriz energética em países que não possuem outras fontes primárias para geração de energia elétrica contribui significativamente para emissão de gases causadores do efeito estufa.
Diversos acordos ambientais internacionais visando à sustentabilidade do planeta criaram uma tendência mundial de desenvolver e aperfeiçoar fontes complementares e renováveis de energia, com isso, constata–se um constante aumento no uso de energias renováveis como eólica, solar, hídrica, maré-motriz, biomassa, etc. As fontes complementares de energia possibilitam uma menor dependência dos combustíveis fósseis diminuindo os riscos financeiros com as constantes oscilações do preço do petróleo e as tensões entre os países compradores e os países produtores de petróleo.
Dentre as fontes complementares, acentua–se como foco deste trabalho, a geração eólica que desponta no cenário mundial como uma das mais promissoras e atrativas. Uma prova dessa atratividade é o crescimento expressivo da indústria eólica nos últimos anos como está representado na Figura 2.1 extraída do relatório do ano de 2014 da WWEA (World Wind Energy Association).
Figura 2.1: Capacidade instalada total em megawatts.
Segundo o relatório da WWEA, em 2014 o Brasil tinha o terceiro maior crescimento do mercado de geração eólica com uma capacidade de geração estimada de 1,3GW e representando 7% do crescimento mundial como mostrado na Figura 2.2, no ranking geral de 2014 de capacidade de geração eólica, no ano de 2016 o Brasil ocupa o décimo lugar com uma capacidade total de geração de aproximadamente 10GW e em primeiro lugar está a China com uma capacidade de 145GW.
Figura 2.2: Percentuais da capacidade de energia eólica instalada em 2014.
Fonte: World Wind Energy Association (2014).
2.2 Tecnologias para turbinas eólicas
de tensão e frequência, foram desenvolvidos vários tipo de turbinas eólicas e neste tópico serão apresentados os três modelos de turbinas mais usados na atualidade.
A Figura 2.3 mostra o design e descreve as partes de uma turbina HAWT (Horizontal Axis Wind Turbine). Nas turbinas HAWT o eixo de rotação é paralelo ao solo e o rotor é classificado de acordo com: a orientação com relação à direção do vente (Upwind ou Downwind), o design da ponta de eixo central (rigid ou teetering), o controle do rotor (pitch ou stall), o número de pás (two ou three blades) e o alinhamento das pás de com o vento. Os principais componentes de um aerogerador são mostrados na Figura 2.3 e são descritos a seguir:
• Torre – provê a sustentação da nacele e do rotor na altura adequada para o funcionamento da turbina;
• Nacele – protege os componentes internos das intempéries;
• Pás – responsáveis por transformar a energia cinética do vento em energia rotacional no eixo do aerogerador;
• Rotor – conduz a energia rotacional até o multiplicador de velocidade;
• Caixa de engrenagem – aumenta a velocidade para o gerador elétrico. Também conhecido
como caixa de transmissão ou “gearbox”;
• Gerador elétrico – transforma energia mecânica rotacional em energia elétrica;
• Sensores de vento – indicam a velocidade e direção do vento;
• Controle de giro – posiciona o aerogerador de acordo com a direção do vento;
• Controle de ângulo das pás (ângulo de passo) – muda a inclinação das pás conforme a velocidade do vento;
• Sistema de controle – responsável pela supervisão e controle do gerador elétrico. Figura 2.3: Design HAWT.
No tópico 2.3 será apresentado um modelo matemático da conversão de energia cinética do vento em energia mecânica rotacional no sistema rotor-pás/eixo de transmissão. O modelo do gerador elétrico é apresentado no capítulo 3 junto aos conceitos de controle de campo e de potência elétrica.
2.3 Modelo da turbina eólica
O princípio de funcionamento de uma turbina eólica baseia–se na conversão da energia cinética, que é resultante do movimento de rotação causado pela incidência do vento nas pás. O perfil aerodinâmico das pás deve garantir que a força de sustentação gire o rotor e consequentemente o gerador elétrico.
Cálculo da potência disponível no vento.
Energia cinética de uma massa de ar que se move com velocidade :
, (1)
sendo a massa do ar em kg e a velocidade em m/s. Quando a massa de ar passa através de uma área S em um intervalo de tempo t, a taxa de variação da massa é dada por:
(2)
sendo a densidade do ar em kg/m3 e S a área de varredura em m2.
A potência máxima que a massa de ar pode transferir é dada por:
, (3)
. (4)
Entretanto só parte da potencia do vento é transferida para a turbina e convertida em potência mecânica no rotor da turbina. A equação que define a máxima potência que pode ser extraída por uma turbina eólica é:
sendo o coeficiente de potência (eficiência aerodinâmica).
A eficiência aerodinâmica máxima é 0.593, o que significa que idealmente apenas 59,3% da energia do vento é transferida para a turbina eólica. O coeficiente de potência é uma função de , razão entre velocidade da ponta de pá e velocidade do vento, e de , o ângulo de passo. O controle do ângulo de passo é um sistema ativo que altera o ângulo de ataque das pás girando-as em torno de seu próprio eixo longitudinal, com o propósito de melhor aproveitar a velocidade do vento ou atuar na proteção do aerogerador. A redução do ângulo de ataque diminui as forças aerodinâmicas atuantes e, consequentemente, a extração de potência. Para todas as velocidades do vento superiores à nominal, o ângulo é escolhido de forma que a turbina produza apenas a potência nominal.
A relação entre e as variáveis λ e β é dada pela equação:
(6)
Sendo β o ângulo de passo em graus e a razão entre a velocidade da ponta de pá e a velocidade do vento,
, (7)
sendo a velocidade angular da turbina, R o raio da circunferência descrita pelas pás da turbina e a velocidade do vento. Os parâmetros , , , , e são parâmetros que dependem das caracteristicas da turbina, para efeito de calculo foram adotados valores de uma turbina específica como a que foi apresentada por (SLOOTWEG, 2003); 0,5176, , , , e . A equação (8) apresenta a relação entre λ e β:
(8)
A Figura 2.4 mostra o comportamento de Cp para diversos valores do ângulo de passo em função da razão de velocidade (λ) utilizando o modelo matemático dado pelas equações (6) e (8). Observa–se que à medida que o ângulo aumenta, o coeficiente de potência diminui e consequentemente a potência elétrica gerada pela turbina diminui, observa–se também que para cada β existe um valor de λ para o qual é máximo.
Fonte: Autor.
O conjugado mecânico da turbina eólica é a razão da potência mecânica em relação à velocidade do eixo.
, (9)
sendo o raio da turbina (o tamanho da pá da turbina).
Adotando–se o modelo de massa única “lumped mass”, o acoplamento mecânico entre
a turbina eólica e o gerador pode ser representado pela seguinte equação:
, (10)
, (11)
sendo o conjugado eletromagnético desenvolvido pela máquina em (N.m), o conjugado mecânico aplicado no eixo do rotor em (N.m), a velocidade mecânica da máquina em (rad/s), a constante de amortecimento do sistema concentrado no eixo do gerador, a constante de inércia do rotor do gerador, a constante de inércia da turbina, a constantes de inércia total concentrada do gerador e da turbina.
2.4 Tecnologias para turbinas eólicas
As turbinas eólicas podem ser classificadas quanto à velocidade como: velocidade constante ou velocidade variável.
1. Operação em velocidade constante
A maioria das turbinas eólicas que operam em velocidade constante utiliza o chamado conceito dinamarquês. Neste conceito, o gerador de indução em gaiola de esquilo é conectado diretamente com a rede elétrica. Consequentemente a velocidade do rotor será quase constante, pois os geradores de indução em gaiola de esquilo possuem um escorregamento entre 1-2%. A Figura 2.5 mostra uma turbina que utiliza o gerador de indução com rotor em gaiola de esquilo com uma turbina que opera em velocidade constante. As vantagens de usar esse tipo de turbina é um custo relativamente baixo e uma boa robustez, as desvantagens são: a limitada da eficiência aerodinâmica (existência de um único ponto de onde a potência de saída é máxima), constante necessidade de manutenção de sua caixa de transmissão e a instalação de banco de capacitores para compensação de reativos indutivos.
Figura 2.5: Turbina de velocidade fixa com gerador de indução de rotor em gaiola de esquilo.
Fonte: [7]-adaptada.
2. Operação em velocidade variável
se trabalha com este tipo de turbina é adaptar continuamente a velocidade de rotação da turbina com a velocidade do vento de modo a extrair a máxima potência possível.
As turbinas eólicas que trabalham com velocidade variável podem ser utilizadas em conjunto com diferentes tipos de geradores elétricos, os geradores elétricos mais utilizados são os geradores síncronos (de rotor bobinado ou de imãs permanentes) e assíncronos ou de indução.
Sistema com geradores síncronos de rotor bobinado ou de imã permanente
Os geradores síncronos de rotor bobinado para aplicações em sistemas eólicos normalmente possuem uma grande quantidade de polos eliminando a necessidade da caixa de multiplicadora de velocidade e proporcionando o acoplamento direto do gerador à turbina eólica; outra vantagem na utilização de geradores síncronos é a possibilidade de usar retificadores não controlados. Uma desvantagem, que eleva os custos deste sistema, é a necessidade de um conversor estático, de potência idêntica à potência do gerador elétrico, para o processamento da energia proveniente do estator.
Figura 2.6: Gerador síncrono de rotor bobinado.
Fonte: [7] – adaptada.
Outra desvantagem de usar geradores síncronos de imã permanente é o custo dos ímãs permanentes que aumenta o preço final do sistema e quando ocorre à desmagnetização do material do ímã permanente não é possível controlar o fator da potência da máquina.
Sistema usando gerador de indução tipo gaiola de esquilo
A configuração usando gerador de indução tipo gaiola de esquilo é mostrada na Figura 2.7, nesta configuração o enrolamento do estator é conectado à rede através de um conversor
Figura 2.7: Gerador de indução tipo gaiola de esquilo.
Fonte: [7] – adaptada.
A montagem da apresentada na Figura 2.7 é uma boa opção para ser utilizada como gerador eólico, pois é robusta, segura, econômica e universalmente popular, no entanto, a principal desvantagem deste sistema é que os conversores de potência são caros e representam perdas elétricas adicionais no sistema, outra desvantagem é o uso da caixa de engrenagem, o que resulta também em maiores perdas mecânicas.
Sistema usando gerador de indução duplamente alimentado (DFIG)
O DFIG (Doubly Fed Induction Generator) é uma máquina de indução com rotor
bobinado onde um conversor é conectado à rede e o outro é conectado aos enrolamentos do rotor, sendo que os dois conversores são interligados através de um barramento CC.
Figura 2.8: Gerador de indução duplamente alimentado
Fonte: [7] – adaptada.
estator à rede elétrica e da versatilidade de controle independente de potência ativa e reativa. O conversor usado para alimentar o rotor do DFIG tem o fluxo de potência na faixa de 20% a 30% da potência entregue à rede pelo estator, isso reduz os custos do projeto com conversores de potência. Com desvantagem, além da caixa de engrenagens, a conexão do estator diretamente à rede elétrica que faz com que a máquina seja bastante suscetível a distúrbios provenientes do sistema elétrico.
3
Modelo da máquina de indução
Visando obter um modelo matemático da máquina de indução usando a transformação abc dq0 que descreve o comportamento das máquinas de indução, tanto no caso de funcionarem como motores quanto como de geradores, serão feitas algumas considerações[16]:
(i) Os enrolamentos do estator e do rotor são idênticos e distribuídos e estão defasados de 120º;
(ii) O entreferro é considerado constante
(iii) O circuito magnético é considerado ideal, não existe saturação;
(iv) A distribuição da densidade de fluxo magnético no entreferro é radial e senoidal; (v) Não serão consideradas as perdas magnéticas e mecânicas.
As equações que descrevem as tensões do estator e rotor para a máquina de indução
duplamente alimentada nas variáveis abc podem ser representadas nas equações[16]:
Estator
, (12)
, (13)
, (14)
Rotor
, (15)
, (16)
, (17)
Para melhor identificar os sistemas de referência nos quais os vetores são descritos, coordenadas diferentes são adotadas para cada um deles. A velocidade de cada um desses sistemas e as correspondentes coordenadas são:
1. Coordenadas : sistema de referência estacionário fixado no estator, cuja velocidade é zero;
2. Coordenadas : sistema de referência que gira com a velocidade arbitrária ;
3. Coordenadas : sistema de referência síncrono, cuja velocidade é a síncrona, dada por .
3.1 Modelo no sistema de referência com velocidade arbitrária
Conhecidos os vetores representativos das grandezas do estator e do rotor, expressos nas coordenadas do sistema estacionário, pode–se definir o novo sistema de referência de coordenadas e , girando no sentido anti-horário e na velocidade arbitrária dada por
A posição espacial do vetor do estator nesse novo sistema é descrita pelo ângulo
espacial elétrico , sendo o ângulo relativo entre os eixos e , como ilustrado na Figura 3.1.
Figura 3.1: Transformação - .
Fonte: [2] - adaptada
1. Sistema estacionário: ; 2. Sistema girante síncrono: ;
3. Sistema girante rotórico: ;
4. Sistema girante estatórico: .
Sendo a velocidade mecânica do rotor e p o número de polos.
Na transformação dos vetores de coordenadas para o sistema genérico de
coordenadas , que gira com uma velocidade
, emprega–se o operador espacial [2].
O vetor corrente de estator definido no sistema de referência genérico é mostrado na equação (18):
, (18)
sendo o vetor corrente no estator no referencial , a barra sobre o i indica que o mesmo é um vetor.
, (19)
. (20)
Na forma matricial, a equação (20) torna–se:
. (21)
A transformação das variáveis trifásicas do estator no referencial para o sistema de coordenadas , é:
–
–
. (22)
Incluindo–se a componente de sequencia zero da corrente e escrevendo a equação na forma matricial, tem–se:
sendo a componente de sequencia zero definida por .
O vetor corrente do rotor definido no sistema de referência genérico é:
, (24)
sendo o vetor corrente no rotor referido ao estator quando este estava no referencial , por isso, o aparecimento do termo ( é número de espiras efetivas em série de cada fase, no rotor ou no estator), é interessante adotar o termo multiplicativo para representar a influência da velocidade de giro do rotor sobre os parâmetros elétricos referenciados no sistema [2]:
. (25)
A transformação das variáveis trifásicas do rotor no referencial para o sistema de coordenadas , é:
–
–
. (26)
Incluindo–se a componente de sequencia zero da corrente e escrevendo a equação na forma matricial, tem–se a transformação direta [2]:
, (27)
sendo a componente de sequencia zero definida por .
3.2 O modelo no sistema de referência síncrono
Representando os circuitos do estator e do rotor no referencial [2].
Estator
, (28)
, (29)
Rotor
, (30)
, (31)
sendo , , e , respectivamente, os fluxos concatenados resultantes das componentes dos fluxos nos eixos de quadratura e direto do estator e do rotor. As
equações podem ser reescritas considerando que todas as variáveis estão girando (à ) no referencial síncrono de um plano (no caso em que o sistema retonaria à forma estacionária)[2]:
Estator
, (32)
, (33)
Rotor ( )
, (34)
. (35)
Considerando o movimento rotórico ( ), a velocidade do rotor relativa ao plano síncrono rotativo é , então, no plano , as equações do rotor são escritas na forma:
, (36)
sendo o escorregamento,
As Figuras 3.2 e 3.3 mostra o circuito equivalente do modelo dinâmico de no referencial síncrono que satisfaz as equações (32), (33), (36) e (37). Uma vantagem do modelo dinâmico de da máquina é que todas as variáveis senoidais no plano estacionário aparecem no plano síncrono como quantidades constantes.
Figura 3.2: Circuito equivalente da máquina de indução baseado nos parâmetros no eixo .
Fonte: [2] - adaptada.
Figura 3.3: Circuito equivalente da máquina de indução baseado nos parâmetros no eixo .
Fonte: [2] - adaptada.
Eixo de quadratura
, (38)
, (39)
, (40)
Eixo direto
, (41)
, (42)
, (43)
sendo e . Sendo a indutância de magnetização, a
indutância própria do estator e a indutância própria do rotor.
Substituindo as equações dos enlaces de fluxo nas equações de circuito do estator e do rotor (32, 33, 36 e 36) e aplicando a transformada de Laplace, encontraremos o modelo transiente da máquina de indução em termos das tensões e correntes[2]:
, (44)
sendo p o operador de Laplace.
Para uma máquina de indução simples (que não é duplamente alimentada),
e conhecendo , e é possível resolver a equação (44) e encontrar as
correntes , , e . A velocidade ( ) normalmente não pode ser
tratada como uma constante, pois deve ser incluída na expressão do torque mecânico da máquina:
, (45)
. (46)
Ou:
, (47)
sendo , , . Usando o mesmo
procedimento para o rotor é obtida a equação (48):
. (48)
Figura 3.4: Circuito equivalente no plano complexo síncrono .
Fonte: [2] - adaptada.
A Figura 3.4 mostra o circuito equivalente com equações no plano síncrono e
. No estado estacionário os termos derivados no tempo são zero e as equações ficam:
, (49)
. (50)
Os vetores complexos foram substituídos pelos valores RMS dos fasores. A equação do torque pode ser escrita na forma[2]:
. (51)
Resolvendo o produto vetorial em termos das componentes no plano , representado na Figura 3.5, obtém–se:
, (53)
ou:
. (54)
Figura 3.5: Vetores de fluxo e corrente no plano .
Fonte:[2] - adaptada.
3.3 Princípio do controle vetorial
A estratégia de Controle Vetorial é a forma utilizada para conseguir que o controle da máquina de indução se comporte como se fosse uma máquina de corrente contínua. O conceito de orientação de fluxo consiste em fixar no eixo direto, em um sistema de coordenadas síncronas, um dos três fluxos magnéticos da máquina: o do estator, o do rotor ou do entreferro. De forma prática, o que se busca com Controle Vetorial é desacoplar os eixos direto e de quadratura.Como exemplo, pode ser utilizado à orientação do fluxo do rotor em um referencial de coordenadas dq, o eixo direto d é alinhado com o vetor fluxo do rotor, conforme Figura 3.6. A componente do vetor fluxo do rotor no eixo em quadratura q é nula,
, e o fluxo do eixo direto é próprio fluxo do rotor.
Fonte: [16].
3.4 Máquinas de Indução Duplamente Alimentada
A máquina de indução com rotor do tipo anel pode ser analisada através de três terminais: estator, rotor e eixo mecânico; como mostrado na Figura 3.7. Ao terminal do estator são associadas as potências e , ao terminal do rotor, as potência e , e ao eixo a potência mecânica [2].
A convenção adotada é a de que potências fornecidas à máquina de indução, através desses terminais, são positivas. Quando o rotor da máquina de indução é do tipo bobinado, as variáveis tensão e corrente do rotor constituem variáveis de controle, que permitem o controle do fluxo de potência e do torque desenvolvido pela máquina de indução. Quando funciona como gerador, seu uso pode ser conveniente nas aplicações em que a velocidade da turbina de acionamento é variável; essa característica pode ser aproveitada na geração de energia eólica, visto que a velocidade do vento é variável e que a implementação de um sistema de controle de velocidade para turbina eólica torna o projeto do aerogerador mais caro.
Figura 3.7: Máquina de indução duplamente alimentada
Em qualquer das aplicações, o gerador de indução isolado ou ligado ao barramento infinito (rede elétrica de transmissão/distribuição) e independente do tipo de rotor, necessita de fontes externas de potência reativa para a sua magnetização.
O gerador de indução duplamente alimentado (DFIG), funcionando isolado da rede, pode exigir o controle da magnitude e da frequência da tensão gerada, bem como o controle das potências ativa e reativa. Quando conectado ao barramento, a magnitude e a frequência da tensão do estator são definidas pela rede e o controle do DFIG se reduz ao controle das potências ativa e reativa [2].
O fato de a máquina de rotor bobinado permitir o acesso via terminais de rotor torna possível fazê-la funcionar nas velocidades síncronas, subsíncrona e supersíncrona, tanto no modo motor quanto no modo gerador. Na velocidade síncrona, a excitação deve ser em corrente contínua, nas demais velocidades a excitação se dá em corrente alternada.
3.4.1
Fluxo de potência em regime permanente
As potências terminais do estator e do rotor, descritas em função das correntes, são dadas pelas seguintes expressões:
, (55)
, (56)
, (57)
. (58)
A potência eletromecânica é dada por [2]:
. (59)
3.4.2
Orientação do fluxo
fazer o controle independente do torque e do fluxo. Porém no caso específico da máquina de indução duplamente alimentada, conectada ao barramento infinito e funcionando no modo gerador, deseja–se que o controle das potências ativa e reativa de estator seja realizado de forma independente, ou seja, alterações em não levam a modificações em e vice-versa.
3.4.2.1
Orientação do fluxo do rotor
Esta seção ilutra porquê a orientação de fluxo do rotor não deve ser utilizada no controle do gerador DFIG. O equacionamento a seguir é apresentado em [2].
Uma vez que , o fluxo do estator escrito em função da corrente de rotor é
dado por
. (60)
Substituindo convenientemente a equação (60) na equação (47), se estabelece os componentes de eixo direto e em quadratura do vetor de tensão de estator de regime permanente:
, (61)
. (62)
O cálculo da potência de terminal do estator deve ser feito em função do fluxo e das variáveis de controle e e, sendo assim, as correntes de estator devem ser escritas em
função dessas variáveis. Então, a partir do emprego das equações dos fluxos concatenados no estator, obtém–se:
, (63)
. (64)
, (65)
. (66)
Nas quais o fluxo do rotor é obtido a partir da equação (60) e é dado por [16]-[2]:
, (67)
sendo o fator de dispersão da máquina.
Pelo fato de a potência ativa e reativa do estator serem função do fluxo do rotor, que depende de , e da componente , o desejado controle independente das potências e
não ocorre quando se adota a orientação do fluxo do rotor na máquina duplamente alimentada. Considerando o equacionamento apresentado nesta seção, preferiu-se utilizar a orientação de fluxo a partir do fluxo do estator para a modelagem da máquina de indução.
3.4.2.2
Orientação do fluxo do estator
A orientação segundo o fluxo de estator considera que: , . Quando aplicados nas equações dos fluxos concatenados no estator, dá origem as equações (68) e (69) [2]:
, (68)
. (69)
Aplicando as equações (68) e (69) na equação (47), obtém–se:
, (70)
. (71)
, (72)
. (73)
Se os terminais do estator são conectados ao barramento infinito e assume–se (hipótese geralmente válida para máquinas de centenas de kW) , o fluxo do estator é constante; assim sendo, a partir das equações (70) e (71) têm–se:
, (74)
, (75)
que, combinadas às equações (72) e (73), estabelecem as expressões finais de potências:
, (76)
. (77)
Uma vez que é constante, a potência ativa é função apenas de , enquanto a
potência reativa depende apenas de ; assim sendo, na orientação segundo o fluxo do estator tem–se o controle independente das potências e da máquina duplamente alimentada.
As expressões das potências ativa e reativa do rotor são dadas por[2]:
, (78)
. (79)
3.4.3 Topologia do sistema de geração
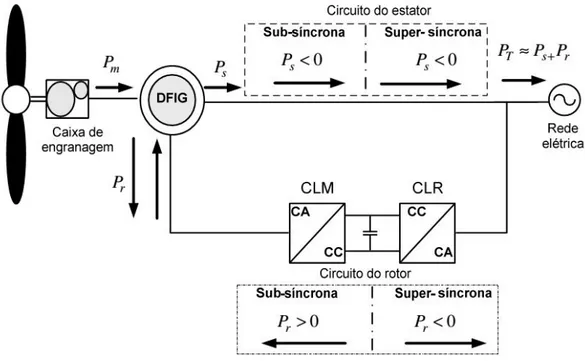
Esta configuração permite à máquina trabalhar nas velocidades subsíncrona, síncrona e supersíncrona. O princípio de funcionamento do DFIG pode ser visualizado através da Figura 3.8. Admitindo–se o sentido positivo para o consumo de energia e negativo para o fornecimento, observa–se que a potência elétrica fornecida pelo gerador à rede pode ser transferida através do estator e simultaneamente fornecida ou consumida pelo rotor através de um conversor de potência bidirecional.
A razão para se introduzir um conversor no circuito rotórico é a reduzida potência deste conversor, tipicamente da potência nominal do gerador. Isso se deve ao fato do conversor controlar apenas a potência de escorregamento de rotor, ou seja, a potência do conversor depende diretamente da faixa de variação da velocidade do rotor com relação a velocidade síncrona do gerador e da potência reativa necessária para magnetizar o gerador.
Figura 3.8: Princípio de funcionamento do DFIG.
Fonte: [16].
O escorregamento é dado por , sendo é velocidade síncrona e a
O conversor do lado da máquina (CLM) geralmente é usado para controlar a potência ativa e reativa do circuito estatórico, enquanto o conversor do lado da rede (CLR) regula o barramento CC (para equilibrar o fluxo de potência entre os conversores) e controla o fator de potência entre o circuito rotórico e a rede elétrica. O CLR é conectado a rede através de um filtro L ou LCL e o CLR conversor é ligado diretamente ao rotor do DFIG.
Desprezando–se as perdas e considerando a máquina em regime permanente, a potência total gerada e entregue para a rede é dada por :
. (80)
A relação entre a potência mecânica do rotor e do estator é descrita pela equação:
. (81)
Então a potência mecânica total, desprezando as perdas é:
. (82)
Com ajuda das equações (81) e (82) é possível resumir o princípio de funcionamento do DFIG ligado à rede elétrica na tabela 3.1:
Tabela 3.1: Resumo das convenções de transferência de potência adotadas para o DFIG.
Escorregamento ‘ ’ Modo de Operação Fluxo de Potência
Gerador Rotor Rede
Estator Rede
Motor Rede Rotor
Estator Rede
Fonte: Autor.
3.5 Controle do conversor do lado da máquina
Para o controle do conversor do lado da máquina, utilizou–se o controle vetorial orientado pelo campo a partir do fluxo do estator, cujo diagrama vetorial das variáveis da máquina de indução e os ângulos utilizados no controle estão mostrados conforme a Figura 3.9.
Figura 3.9: Orientação do fluxo no estator.
Fonte: [16] – adaptada.
O sistema de eixo ortogonal gira na velocidade síncrona . O eixo diretor do estator é alinhado com o fluxo do estator, , de modo que na direção do eixo o fluxo seja constante e na direção do eixo seja sempre zero:
, (83)
isolando–se o na equação (83) :
. (84)
O fluxo no eixo de quadratura é zero:
, (85)
isolando–se o na equação (85):
, (86)
, (87)
. (88)
Substituindo a equação (86) na equação (37) e a equação (84) na equação (36) obtêm–
se as equações que representam as tensões nos eixos direto e de quadratura do rotor no referencial do fluxo do estator, ou seja[16]:
, (89)
, (90)
sendo o fator de dispersão da máquina.
Aplicando a transformada de Laplace em 89 e 90 obtêm–se as funções de transferência das malhas de correntes do rotor representadas por:
, (91)
. (92)
Observa–se que existe um acoplamento entre as malhas de correntes. A corrente interfere na referência de tensão do rotor do eixo q e a corrente interfere na referência de
tensão do eixo d. Como o acoplamento entre as malhas das correntes do rotor é proporcional ao escorregamento, que pode chegar a 30% para o DFIG então é comum compensá-las por sinais ( e ) nas saídas dos controladores PIs das correntes para garantir um
melhor desacoplamento dos controles das correntes e [16]:
, (93)
. (94)
3.6 Modelagem do conversor CA/CC conectado à rede
indutores de filtro trifásicos e dos indutores que representam de forma simplificada as
características da rede e do transformador no ponto de conexão comum da rede elétrica com o gerador eólico. A rede é assumida ser equilibrada e sem distorções.
Figura 3.12: Conversor CA-CC trifásico bidirecional.
Fonte:[16]-[7].
De acordo com o circuito da Figura 3.12, encontra–se o sistema mostrado na equação (95):
. (95)
Para o controle do conversor será o controle vetorial orientado segundo o vetor de tensão da rede elétrica. No referencial síncrono , o eixo é alinhado com o vetor de tensão
, então:
, (96)
aplicando uma transformação no sistema da equação (95), obtém–se[16]:
, (97)
sendo a pulsação elétrica da rede.
As equações (97) e (98) serão usadas no projeto das malhas de corrente do controlador do conversor do lado da rede.
A corrente e a tensão no barramento CC podem ser calculadas pelas seguintes equações[16]-[7]:
, (99)
, (100)
sendo a tensão contínua no barramento CC.
Negligenciando os harmônicos gerados pela comutação dos transistores e as perdas da máquina e do conversor, a equação do fluxo de potência ativa no conversor pode ser escrita:
. (101)
A equação que descreve o comportamento da tensão no barramento CC é encontrada a partir da combinação das equações (100) e (101):
. (102)
O controlador deve garantir que a tensão no barramento CC se mantenha constante, isso significa que ele deve assegurar que o fluxo de potência entre a rede e o rotor seja constate.
3.7 Linearização do modelo
Linearização das equações de controle do rotor
, (103)
linearizando o sistema, obtém–se:
. (104)
Modelo do acoplamento mecânico entre a turbina e o gerador
, (105)
Tomando , tem–se:
. (106)
Linearização do modelo do conversor do lado da rede
Reescrevendo as equações 97 e 98:
, (107)
. (108)
O modelo linearizado para o projeto dos controladores do conversor do lado da rede elétrica pode ser escrito na forma de equação de estados a seguir[16]:
. (109)
Linearização do modelo do barramento CC
. (110)
de ordem superior, desta forma, podem–se considerar apenas os termos lineares. Estes termos devem ser suficientemente pequenos, isto é, os valores das variáveis se desviam apenas ligeiramente da condição de operação. Usando os parâmetros do DFIG mostrados na tabela 3.2, é possível obter um modelo numérico para o sistema.
Tabela 3.2: Parâmetros do DFIG para modelo numérico.
Parâmetro Valor Unidade
Resistência no Estator ( ) 0,5968 Ohm
Resistência no Rotor ( ) 0,6258 Ohm
Indutância no Estator ( ) 0,0357 Henry
Indutância no Rotor ( ) 0,0409 Henry
Indutância Mútua ( ) 0,0354 Henry
Constante de Inércia ( ) 0,0500
Coeficiente de Inércia no
Eixo ( ) 0,0059
Tensão Nominal ( ) 400 V
Potência Nominal( ) 18450 VA
Conjugado ( ) 97,87 Nm
Velocidade nominal ( ) 188,5
Frequência ( ) 60 Hz
Número de pares de polos 2 -
Fonte: Autor.
Considerando as representações no espaço de estado das equações 104 e 106, tem–se:
, (111)
. (112)
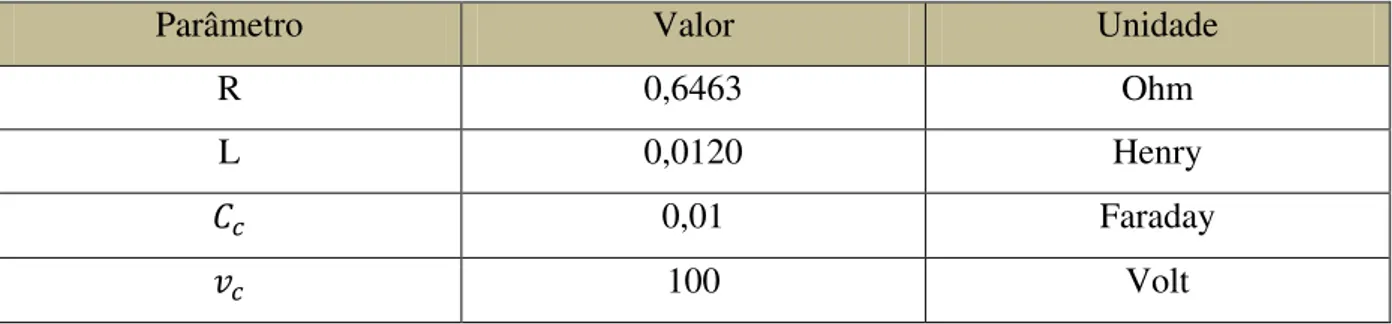
Tabela 3.3: Parâmetros da rede elétrica e do barramento CC para modelo numérico.
Parâmetro Valor Unidade
R 0,6463 Ohm
L 0,0120 Henry
0,01 Faraday
100 Volt
Fonte: Autor.
Considerando os valores da tabela 3.3 e as representações no espaço de estado das equações 109 e 110, tem–se:
(113)
4
Estratégia clássica de controle
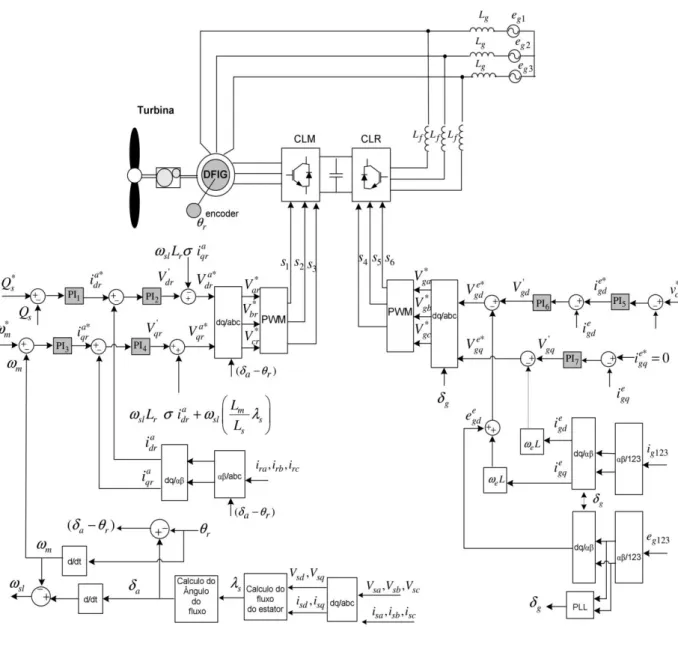
Nesta seção será apresentada a topologia de controle clássica para o DFIG usando controladores PI. A Figura 4.1, retirada da referência [16], mostra a configuração dos controladores dos conversores do lado da máquina e do lado da rede elétrica.
Figura 4.1: Estratégia de controle clássica com PI para o DFIG.
Fonte: [16].
como função o controle da velocidade da máquina, ou potência ativa do estator, que tem por sinal de referência a velocidade, que possibilita a operação da turbina eólica em máximo rendimento, sendo definida a partir de medições da velocidade do vento.
O sinal de erro da potência reativa do estator entra no controlador PI1 e esse
controlador fornece o valor de referência da corrente do rotor do eixo .
Figura 4.2: Controlador recebe um sinal de erro ( ) e gera o valor de corrente de referência .
Fonte: [16] – adaptada.
De maneira análoga, o erro da corrente do eixo direto é processado pelo controlador que gera em sua saída o sinal que será somado ao termo fornecendo a referência da tensão do eixo direto .
Figura 4.3: Controlador recebendo um sinal de erro ( ) e gerando um valor de tensão de referência do eixo direto.
Fonte:[16] – adaptada.
O sinal de erro da malha externa de velocidade é a entrada do controlador que gera em sua saída a referência da malha interna da corrente do rotor do eixo em quadratura .
Figura 4.4: Controlador recebendo um sinal de erro ( ) e gerando um valor de corrente de referência do eixo em quadratura.
O sinal de erro da corrente em quadratura é processado pelo controlador que gera
em sua saída o sinal que será somado ao termo gerando a
referência da tensão do eixo em quadratura .
Figura 4.5: Controlador recebendo um sinal de erro ( ) e gerando um valor de tensão de referência do eixo em quadratura.
Fonte:[16] – adaptada.
As tensões de referência e são aplicadas ao bloco transformador de
coordenadas que geram as tensões de referência , , que serão moduladas por largura de pulso para gerar os pulsos e acionar as chaves do conversor.
Figura 4.6: Transformação de coordenadas modulação por largura de pulso das tensões.
Fonte: [16] – adaptada.
O conversor do lado da rede tem como objetivo regular a tensão do barramento CC independente do sentido do fluxo de potência ativa e reativa que flui entre o rotor e a rede. Uma segunda função é manter o fator de potência unitário no ponto de conexão comum com a rede e, consequentemente, o controle de potência reativa.
As tensões da rede elétrica ( , , ) são aplicadas ao bloco transformador de coordenadas que, através de um algoritmo PLL, calcula o ângulo da tensão .No
diagrama de controle, a tensão no barramento CC é controlada usando o controlador , que gera em sua saída a referência da malha interna da corrente .
Figura 4.7: Controlador gerando a partir do erro ( ).
Fonte:[16] – adaptada.
A corrente de referência do eixo de quadratura é considerada igual a zero, tendo
em vista que o conversor opera com fator de potência unitário. Entretanto, dependendo da necessidade do sistema, se tiver trabalhando com carga isolada ou até mesmo na ligação à
rede elétrica, o valor de pode ser diferente de zero, podendo assumir valores positivos ou
negativos de tal forma que gerem reativos capacitivos ou indutivos.
O erro entre as correntes de referência e medida ( ) é aplicado em para gerar como mostrado na Figura 4.8.
Figura 4.8: Controlador gerando a partir do erro ( ).
Fonte:[16] – adaptada.
De forma semelhante, o controlador gera quando recebe o sinal ( ).
Figura 4.9: Controlador PI7 gerando a partir do erro ( ).
A topologia clássica com PI tem como vantagem a simplicidade de implementação do controlador. Porém, essa estrutura não garante a robustez com relação a variações paramétricas. Para evitar trabalhar com controladores não lineares utilizam–se os controladores proporcionais integrais.
5
Tópicos sobre LMIs aplicadas à teoria de controle
5.1 Introdução às LMIs
Uma LMI tem, por definição, a forma [3]:
. (115)
sendo a variável e as matrizes | são conhecidas. O símbolo de
desigualdade na equação (115) significa que é definida positiva, e diferente do vetor nulo. Nesse caso a LMI é estrita, pois a função é estritamente positiva; entretanto, há casos em que é possível encontrar solução para , nesses casos é positiva semi-definida e a LMI é não estrita.
Se a LMI estrita é factível, ou seja, tem um conjunto solução, então a equação (116) é verdadeira [3]:
, (116)
onde a notação representa o conjunto complementar.
O conjunto solução da LMI não estrita é muito próximo do conjunto solução da LMI estrita de maneira que na maioria dos casos é possível considerar apenas a solução de e a LMI é estritamente factível.
Uma LMI não necessariamente tem que ser definida positiva, a desigualdade pode ter a forma ( ) definida negativa, ( ) semi-definida negativa, ( ) semi-definida positiva.
5.2 Conjuntos convexos
Seja um espaço vetorial real ou complexo e . Um vetor da forma com todos os coeficientes não negativos e é uma combinação convexa de . Um conjunto é convexo se qualquer combinação convexa de vetores de S pertence à S [9].
A casca convexa de S é o conjunto de todas as combinações convexas de S. O politopo convexo é a casca convexa do um conjunto finito de vetores em . Seja um conjunto convexo, uma função é convexa se para todo
, , { , , [9].
† A LMI é equivalente a um conjunto de desigualdades polinomiais em , obtidas impondo–se que os princípias líderes (cada linha da desigualdade) de devem ser todos positivos; é uma restrição convexa, ou seja, o conjunto é um conjunto convexo[18].
Prova: Seja o conjunto de todas as soluções possíveis da LMI , Se e são duas soluções quaisquer da LMI então e e qualquer combinação convexa de e , representada por sendo o coeficiente de combinação convexa, tem–se [18]:
, (117)
e portanto também é solução da LMI. Logo é convexo.
A Figura 5.1 ilustra a combinação convexa dos pontos pertencentes ao conjunto convexo.
Figura 5.1: Combinação convexa dos pontos , com 0 ≤ ≤ 1.
5.3 Resolução de LMI
Afim de resolver LMI úteis nos problemas de controle, interfaces foram desenvolvidas permitido escrever os problemas em formas matriciais simples. Algumas dessas ferramentas são LMI-Tools de El Ghaoui, LMI Control Toolbox da MathWorks e a interface SeDuMi desenvolvido por LAAS.
Os três problemas clássicos que essas ferramentas resolvem são[3]:
- a factibilidade (ou existência): encontrar resolvendo ;
- minimização de uma função linear: encontrar minimizando , restrição ;
- o problema dos autovalores: minimizar , restrições , e .
5.3.1 Complemento de Schur
Tipicamente, o problema de controle a ser resolvido não aparece naturalmente na forma de uma LMI. Algumas ferramentas matemáticas são bastante úteis na tarefa de tentar reescrever o problema em questão através de LMIs. Se a natureza do problema original for convexa, muito provavelmente haverá uma forma de reescrevê-lo através de LMIs. O complemento de Schur é uma ferramenta importante na manipulação de desigualdades matriciais [3].
A LMI :
, (118) sendo e , é equivalente à:
. (119)
Constatação[5]:
, (120)
a partir da multiplicação obtém–se:
5.4 Norma
de Sistemas
Considerando o sistema linear, invariante no tempo e estável:
, (122)
,
,
sendo o vetor de estados, o vetor entrada, o vetor de saída, são matrizes constantes com dimensões apropriadas. Este sistema pode ser representado no domínio da frequência pela seguinte matriz de transferência [6]:
. (123)
Para sistemas SISO a norma do sistema (122) é definida como o maior ganho da sua resposta em frequência (respostas em regime permanente para excitações senoidais de diversas frequências).
Considere o conjunto de todos os valores da função complexa no intervalo , , que o crescimento do valor absoluto de ordem tem uma integral de Lebesgue finita [6]:
. (124)
No caso em que a ordem, p, tende ao infinito, tem–se um conjunto de funções limitado superiormente em todo o intervalo , cuja norma é dada por:
. (125)
A notação é usada para denotar o espaço de todos as funções complexas que são limitadas no eixo imaginário com norma dada pela equação (126)
. (126)
. (127)
No sistema MIMO (Multiple Input Multiple Output) a ideia de módulo não se aplica e
deve ser substituída pela norma espectral da matriz de transferência. A norma espectral é a norma de matrizes induzida pela norma Euclidiana de vetores; para os vetores e uma matriz satisfazendo . Ela é definida como sendo onde denota o valor singular máximo de M. Os valores singulares de uma matriz M são definidos como sendo [6]:
, (128)
sendo a matriz complexa conjugada transposta de . A norma do sistema corresponde ao pico de ressonância dessa função dando origem à definição:
. (129)
A norma de um sistema representa o maior ganho da sua resposta em frequência e pode também ser vista como o maior ganho em termos de energia que o sistema pode oferecer a um sinal de entrada. Esta interpretação fornece uma definição alternativa da a norma , segundo o teorema de Parseval tem–se [6]:
, (130)
, (131)
sendo , são as transformadas de Fourier dos sinais w(t), z(t). Com , tem–se:
. (132)
A equação (132) pode ser reescrita na forma:
A igualdade ocorre para sendo o autovetor de correspondendo ao seu maior autovalor, é a frequência na qual ocorre o e é a função porta que define o truncamento do sinal para T suficientemente grande; para e zero caso contrario. A versão no domínio do tempo da norma é dada na equação (134).
. (134)
5.4.1 Determinação da Norma
subótima
Uma das maneiras de determinar a norma de um sistema linear é através da sua resposta em frequência. Para sistemas SISO (Single Input Single Output) pode–se utilizar o diagrama de Bode para obter o ganho máximo do sistema com relação à todas as frequências. Entretanto, o conceito de resposta em frequência para sistemas MIMO é mais complexo e pode ser obtido através da noção da decomposição pelo valor singular. Ao invés de determinar o valor exato da norma , uma ideia é determinar numericamente um limitante superior utilizando a equação (134), busca–se um escalar positivo tal que[6]:
, (135)
Para encontrar o valor exato da norma é preciso minimizar de forma iterativa. Este problema pode ser resolvido de diversas maneiras, como por exemplo, pela equação de Riccati, pela matriz Hamiltoniana ou por LMI.
5.4.2 Caráter LMI da norma
Os lemas a seguir mostram o caráter LMI da norma , observa–se que a LMI a ser resolvida depende diretamente do gama optimo da norma .
Lema 1 ( bounded real 1)
Um sistema dinâmico contínuo linear de matrizes de estado A, B, C, D tem uma norma inferior a se e somente se existe uma matriz verificando [5]-[3]:
. (137)
O lema Borné réel pode ser aplicado para calcular a norma de um sistema linear resolvendo um problema de autovalores:
Encontrar as matrizes e que minimizam e verificam [5]-[3]:
, (138)
, (139)
. (140)
Graças ao complemento de Schur, é possível reescrever o lema Borné réel em uma forma na qual cada termo é escrito de maneira afim em função das matrizes do sistema, de forma a obter um conjunto de inequações e permitindo trabalhar separadamente cada inequação.
Lema 2 ( bounded real 2)
Um sistema dinâmico contínuo linear de matrizes de estado A, B, C, D tem uma norma inferior a se e somente se existe uma matriz verificando [5]-[14]:
, (141)
6
Estudo do controle
6.1 Esquema de controle em malha fechada
Considerando o esquema da Figura 6.1. O sistema é controlado por um controlador . Os sinais são:
: a referência; : o erro de regulação;
: sinal de comando;
: perturbação na entrada do sistema;
: sinal a controlar; : ruído;
: sinal de saída medido.
Figura 6.1: Sistema controle com referência, perturbação de entrada e ruído.
Fonte: [5].
O objetivo geral do controle é obter mesmo havendo perturbação e ruído no sistema. Denotando (s) a função de transferência em malha fechada com entrada e saída . A sensibilidade na saída é definida por . A sensibilidade na entrada é definida por , essas sensibilidades serão usadas, mais adiante, na análise em frequência do sistema.
6.2 Critérios a satisfazer
6.2.1 Margem de módulo
para sistemas MIMO. Todavia, a estabilidade não é suficiente e é preciso analisar também as margens de estabilidade. A margem do módulo é definida para o sistema SISO como a distância mínima ao ponto -1 da função de transferência do malha aberto:
. (143)
Em sistemas MIMO a margem do módulo de saída é definida como:
. (144)
E a margem de módulo de entrada é:
. (145)
Figura 6.2: Margem do módulo de um sistema SISO sobre o lugar de Nyquist.
Fonte: [5]
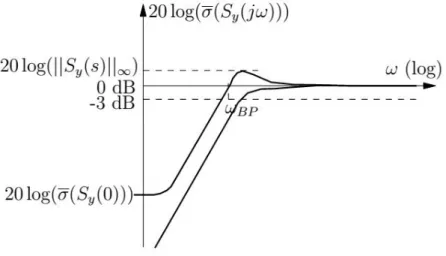
6.2.2 Banda Passante
A fim de se obter um bom comportamento seguindo a entrada, é necessário que a transferência entre a referência e a medida tenha um comportamento do tipo passa baixa com uma frequência de corte, em -3 , suficientemente elevada. De maneira equivalente, é necessário considerar que a transferência entre a referência e o erro seja do tipo passa alta com a mesma frequência de corte. É possível então traçar a representação de