Universidade Federal da Bahia
Instituto de Matem´aticaCurso de P´os-graduac¸˜ao em Matem´atica Dissertac¸˜ao de Mestrado
M´
etodo de Pontos Interiores Aplicado a um
Problema de Seq¨
uenciamento Job-Shop
Alexander dos Santos Dutra
Salvador-Bahia
M´
etodo de Pontos Interiores Aplicado a um
Problema de Seq¨
uenciamento Job-Shop
Disserta¸c˜ao apresentada ao colegiado do curso de P´os-Gradua¸c˜ao em Matem´atica da
Universidade Federal da Bahia, como requisito parcial para obten¸c˜ao do T´ıtulo de
Mestre em Matem´atica Pura.
Banca examinadora
Prof. Dr. Isamara Carvalho Alves (Orientador).
Prof. Dr. Akebo Yamakami
Dutra, A.
“M´etodo de Pontos Interiores Aplicado a um Problema de Seq¨uˆenciamento Job-Shop. ” / Alexander dos Santos Dutra. Salvador-Ba, 2004.
Orientador: Isamara de Carvalho Alves (Universidade Federal da Bahia).
Disserta¸c˜ao de Mestrado apresentada ao curso de P´os-graduac˜ao em
Matem´atica da UFBA, 99 p´aginas.
“N˜ao h´a nada a temer a menos que me esque¸ca de como Deus me condu-ziu at´e aqui. ”
Agradecimentos
A Deus, pelos sinais e maravilhas operadas na vida de minha fam´ılia durante
este per´ıodo de estudos. O Senhor tornou realidade aquilo que todos julg´avamos
im-poss´ıvel. A Deus todo louvor por mais esta vit´oria.
A Suzy, Alexander Junio e Adrielle. Suzy, minha esposa amada, sou grato por
acreditar em mim mesmo nos momentos que nem eu pude acreditar, seu amor faz de
mim o que sou. Meus filhos, Alexander Junio e Adrielle, n˜ao foi f´acil ter papai tanto
tempo perto dos olhos e com a mente t˜ao distante, obrigado por me fazerem sorrir.
A todos os colegas de mestrado agrade¸co pelo companheirismo e amizade.
Aos grandes matem´aticos e amigos Andrade, Augusto, F´abio e Gustavo obrigado pela
contribui¸c˜ao sempre iluminada nos estudos. Jos´e Lu´ıs, obrigado pelo incentivo e
apre-senta¸c˜ao a esta linha de pesquisa que tanto me fascina. Ernesto, meu companheiro de
pesquisa saiba que tem sido ”massa”trabalhar contigo.
Aos professores que contribu´ıram para que este momento fosse poss´ıvel. Em
particular sou grato aos professores Jos´e Fernandes, Elinalva Vergasta e Marco Antˆonio
pelo incentivo e apoio para que pudesse enfrentar esta etapa de estudos.
Um agradecimento especial a professora Isamara Alves pela orienta¸c˜ao e
Resumo
O problema de seq¨uenciamento do tipo job-shop ´e um problema que desperta
o interesse de pesquisadores por sua caracter´ıstica computacional na categoria de um
problema NP - dif´ıcil . Al´em disto, como um problema de programa¸c˜ao matem´atica, o
job-shop constitui um particular desafio por possuir um espa¸co de busca n˜ao convexo.
Tratamos neste trabalho de um problema de job-shop est´atico, determin´ıstico
e com m´aquinas especializadas, para o qual adotamos uma modelagem matem´atica
cont´ınua e n˜ao linear. ´E verdade que modelos de programa¸c˜ao n˜ao linear s˜ao muitas
vezes evitados em fun¸c˜ao da dificuldade encontrada em garantir a convergˆencia para
um m´ınimo global. Contudo, essa dificuldade pode ser superada com o uso do M´etodo
de Pontos Interiores (MPI) o qual tem sido aplicado com sucesso na resolu¸c˜ao de
problemas dessa natureza. Este trabalho realiza, portanto, uma an´alise matem´atica a
fim de viabilizar o uso de MPI na resolu¸c˜ao de um problema de job-shop espec´ıfico.
Propomos o uso de MPI associado com o Lagrangeano Aumentado que foi
usado para guiar o algoritmo por um caminho decrescente para a fun¸c˜ao objetivo.
Para tal, foi preciso alterar algumas das informa¸c˜oes de segunda ordem a fim de
encon-trar dire¸c˜oes primais que garantam esse decrescimento. Mostramos que as mudan¸cas
efetuadas n˜ao alteram a convergˆencia do problema primal, por´em a convergˆencia do
problema dual ´e influenciada. Em fun¸c˜ao disso, adotamos uma varia¸c˜ao na dire¸c˜ao
dual ajustando-a `a fun¸c˜ao de penalidade usada e determinamos as condi¸c˜oes favor´aveis
`a convergˆencia para um ponto que minimize a fun¸c˜ao objetivo do problema tratado.
Abstract
The job-shop-type scheduling problem is an issue that has called the attention
of researchers because of its computational characteristic in the category of an
NP-hard problem. Besides, as a mathematical programming problem, job-shop poses a particular challenge because it comprises a non-convex search environment.
We deal, here, with a specific job-shop problem for which we adopt a
con-tinuous, non-linear mathematical model. Non-linear programming models are often
avoided viz-`a-viz the difficulty we meet when we try to ensure the convergence to a
global minimum. However, this difficulty can be overcome with the use of the Interior
Point Method (IPM), which has been successfully applied when we try to solve
pro-blems of this kind . This thesis proposes, therefore, a mathematical analysis in order to
make possible the use of IPM in the resolution of a specific type of job-shop problem.
We propose the use of IPM together with a Augmented Lagrangean so as
to lead the algorithm in a decreasing way towards the objective function. For that
reason, we needed to alter a few items of second-order information so that we could find
primal directions to ensure that reduction. We shall demonstrate that the accomplished
changes did not significantly alter the convergence of the primal problem. Nevertheless,
the convergence of the dual problem is affected. On account of that, we have resorted
to a variation in the dual direction, fine-tuning it to the penalty utilized. By that
means we are able to determine the conditions that are favorable to a convergence to
a point which minimizes the objective function of the problem we are dealing with.
Sum´
ario
Lista de Figuras xii
Lista de Tabelas xiii
Introdu¸cao Geral 1
1 O Problema de Seq¨uenciamento Job-Shop 3
1.1 Problemas de F´abrica . . . 4
1.2 O Problema de Seq¨uenciamento Job-Shop . . . 5
1.2.1 Modelagem por grafos disjuntivos . . . 7
1.2.2 Representa¸c˜ao de solu¸c˜oes pelo diagrama de Gantt . . . 8
1.3 Formula¸c˜ao Matem´atica para o Job-Shop . . . 10
1.3.1 Crit´erios de otimiza¸c˜ao . . . 10
1.3.2 Modelo de programa¸c˜ao linear com vari´aveis bin´arias . . . 11
1.3.3 Modelo de programa¸c˜ao n˜ao-linear . . . 12
1.4 M´etodos de Resolu¸c˜ao para o Job-Shop . . . 13
1.4.1 M´etodos exatos . . . 13
1.4.2 M´etodos heur´ısticos . . . 14
1.4.3 M´etodos de decomposi¸c˜ao . . . 15
Conclus˜ao . . . 16
2 M´etodo de Pontos Interiores 18 2.1 O M´etodo de Pontos Interiores: Ontem e Hoje . . . 19
2.1.1 Breve hist´orico . . . 19
2.1.2 Aplica¸c˜oes do m´etodo de pontos interiores . . . 20
2.1.3 O m´etodo de pontos interiores versus m´etodo simplex . . . 21
x
2.2 O M´etodo de Pontos Interiores para Programa¸c˜ao Linear . . . 23
2.2.1 M´etodo primal-dual . . . 25
2.2.2 O passo central . . . 26
2.2.3 M´etodos primais . . . 29
2.3 M´etodo de Pontos Interiores Aplicado a Programa¸c˜ao N˜ao Linear . . . 30
2.3.1 Um m´etodo primal-dual barreira-logar´ıtmica (PDBL) . . . 31
2.3.1.1 Fun¸c˜ao de m´erito . . . 33
2.3.1.2 Aplicando o M´etodo de Newton . . . 34
2.3.1.3 Sele¸c˜ao do parˆametros β e µ . . . 36
2.3.2 Um m´etodo primal-dual (PD) . . . 39
Conclus˜ao . . . 42
3 M´etodo de Pontos Interiores Aplicado ao Problema Job-Shop 44 3.1 An´alise do Modelo de Seq¨uenciamento Job-Shop Adotado . . . 45
3.1.1 An´alise do Espa¸co de Busca . . . 46
3.1.2 An´alise da Hessiana do Lagrangeano . . . 49
3.2 M´etodo de Pontos Interiores e o Seq¨uenciamento Job-Shop . . . 53
3.2.1 Defini¸c˜oes iniciais e fun¸c˜oes de m´erito . . . 54
3.2.2 Mudan¸ca da matriz normal N(t, s, y) . . . 56
3.2.3 Um algoritmo de pontos interiores aplicado ao seq¨uenciamento job-shop . . . 62
3.2.3.1 Ponto de partida e parˆametros iniciais . . . 63
3.2.3.2 Encontrando as dire¸c˜oes de busca . . . 66
3.2.3.3 Definindo o tamanho de passo . . . 66
3.3 An´alise de Convergˆencia . . . 69
3.3.1 Condi¸c˜oes para a convergˆencia global do problema de job-shop . 69 3.3.2 Prova de Convergˆencia . . . 70
Conclus˜ao . . . 81
Conclus˜ao Geral 82
Referˆencias Bibliogr´aficas 85
xi
A.1 Tipos de Fun¸c˜oes . . . 91
A.2 Condi¸c˜oes de Otimalidade para Problemas com Restri¸c˜oes . . . 92
A.3 Regra de Armijo . . . 95
A.4 Fun¸c˜ao de m´erito . . . 95
B Algoritmos Sugestivos 97 B.1 Algoritmo para ajuste da matriz Normal Nβ . . . 97
Lista de Figuras
1.1 Grafo potencial-tarefa representando problema-exemplo 1 de job-shop. . 8 1.2 A representa¸c˜ao de uma sele¸c˜ao completa ac´ıclica para o problema-exemplo
de job-shop. . . 9 1.3 A representa¸c˜ao de duas solu¸c˜oes para o problema exemplo 1 no
dia-grama de Gantt . . . 9
Lista de Tabelas
1.1 Dados do problema-exemplo 1 de job-shop. . . 7
3.1 Dados do problema-exemplo 2 de job-shop. . . 48
3.2 Dados do problema-exemplo 3 de job-shop. . . 50
3.3 Dados do problema-exemplo 2 de job-shop. . . 63
3.4 An´alise ponto inicial . . . 64
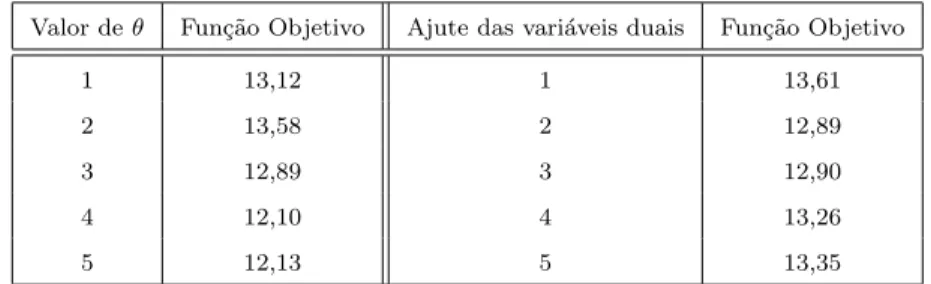
3.5 An´alise dos parˆametros para defini¸c˜ao das vari´aveis de excesso e vari´aveis duais . . . 65
Introdu¸c˜
ao Geral
O mercado atual possui uma tendˆencia a consumir uma variedade grande de
produtos, com uma vida ´util reduzida e com custo o mais baixo poss´ıvel Jain e Meeran
[29]. Atender a estas necessidades requer processos mais complexos. ´E preciso buscar
maneiras de economizar em cada detalhe com a finalidade de obter custos competitivos.
Neste contexto, o problema do seq¨uenciamento de tarefas ´e freq¨uente em ind´ustrias e
empresas de um modo geral, que buscam reduzir seu custo operacional e alcan¸cando
uma maior produtividade.
Os problemas de seq¨uenciamento s˜ao essencialmente de otimiza¸c˜ao restritos
que, num contexto de produ¸c˜ao, envolvem descobrir uma seq¨uˆencia para aloca¸c˜ao de
recursos limitados com a finalidade de atender determinado objetivo. Trataremos neste
trabalho de um tipo particular de seq¨uenciamento em f´abrica conhecido por problema
dejob-shop.
Apesar da grande relevˆancia pr´atica de problemas de job-shop, h´a carac-ter´ısticas te´oricas particularmente importantes a serem consideradas. A primeira, diz
respeito a sua complexidade computacional, sendo classificado como um problema
NP-dif´ıcil (Lenstra e Rinnoy Kan [35], Johnson [30]). A segunda, refere-se a seu espa¸co
de busca de solu¸c˜oes n˜ao conexo, despertando assim, o interesse como problema de
programa¸c˜ao matem´atica dada a maior dificuldade na busca de solu¸c˜ao por um
cami-nho cont´ınuo para este tipo de problema. Estas duas caracter´ısticas agregadas fazem
do problema de job-shopum particular desafio tanto do ponto de vista computacional como do ponto de vista de an´alise matem´atica.
Introdu¸c˜ao Geral 2
direta a n˜ao convexidade do problema em quest˜ao. Para tanto, tomamos um problema
de job-shop com caracter´ısticas espec´ıficas e adotaremos uma modelagem matem´atica cont´ınua de programa¸c˜ao n˜ao linear conforme proposta de E. Pinson [42]. Com esta
modelagem estamos diante de um modelo matem´atico de programa¸c˜ao n˜ao linear e n˜ao
convexo. Este modelo possui ainda caracter´ısticas particulares que o tornar˜ao ainda
mais desafiador. Diante desses desafios, encontramos no M´etodo de Pontos Interiores
(MPI) um aliado poderoso na busca de solu¸c˜ao para o problema dejob-shopem quest˜ao.
O MPI tem sido utilizado com sucesso na resolu¸c˜ao de problemas de
pro-grama¸c˜ao n˜ao linear e n˜ao convexos, conforme in´umeras pesquisas encontradas dentre
os quais citamos os trabalhos de El Bakry et al [17], Granville [27] e Vanderbei e
Shanno [56]. Isto nos levou a buscar uma an´alise mais acurada das caracter´ısticas
ma-tem´aticas do problema de job-shop buscando garantias de convergˆencia para solu¸c˜oes que minimizem o tempo de seq¨uenciamento desejado.
Nosso trabalho est´a organizado da seguinte forma:
No primeiro cap´ıtulo apresentamos uma vis˜ao geral do problema de job-shop
descrevendo suas principais caracter´ısticas e ressaltando aquelas adotadas em nossa
an´alise. Tamb´em, descrevemos duas formas particulares de modelagem matem´atica,
al´em de discutir m´etodos usados na resolu¸c˜ao desse problema.
O MPI ´e o objeto de nossa aten¸c˜ao no segundo cap´ıtulo. Partimos de uma
breve vis˜ao hist´orica e seguimos apresentando algumas dentre as in´umeras
possibilida-des de aplica¸c˜ao possibilida-deste m´etodo que tanto tem possibilida-despertado o interesse de pesquisadores.
Conclu´ımos esta exposi¸c˜ao apresentando o m´etodo de pontos interiores aplic´avel a
modelos de programa¸c˜ao linear e n˜ao-linear.
Os cap´ıtulos anteriores fornecem subs´ıdios para as an´alises realizadas no
ter-ceiro cap´ıtulo onde verificamos com detalhes o modelo matem´atico adotado para o
Cap´ıtulo 1
O Problema de Seq¨
uenciamento
Job-Shop
O problema de seq¨uenciamento do tipo job-shop ´e o mais geral dos
proble-mas de seq¨uenciamento cl´assico conforme Jain e Meeran [29]. Este possui um espa¸co
de busca irregular e caracter´ısticas computacionais capazes de fornecer id´eias e
in-forma¸c˜oes na busca de algoritmos referentes a outras aplica¸c˜oes pr´aticas. Al´em disto,
o job-shop ´e um problema combinat´orio de complexidade computacional classificado como NP-dif´ıcil (Johnson [30], Zwaneveld et al. [59], Strusevich [52]) e sendo
conside-rado um dos mais complexos membros desta classe (Yamada e Nakano [58]).
Uma indica¸c˜ao da complexidade envolvida na busca de solu¸c˜ao de um problema
de job-shop pode dado por um problema proposto em 1963 por Muth e Thompson [40] que consiste no planejamento de 10 tarefas em 10 m´aquinas, cuja solu¸c˜ao ´otima
foi provada somente em 1987, por Carlier e Pinson [12].
O objetivo num problema de seq¨uenciamento job-shop ´e a realiza¸c˜ao de de-terminadas tarefas que podem ser interligadas por restri¸c˜oes de sucess˜ao ou restri¸c˜oes
de localiza¸c˜ao no tempo. Para execu¸c˜ao destas tarefas s˜ao necess´arios certos recursos
(m´aquinas, m˜ao de obra), os quais introduzem restri¸c˜oes disjuntivas no problema. Os recursos disjuntivos acrescentam restri¸c˜oes n˜ao lineares, formando um espa¸co de busca
Problemas de F´abrica 4
Apresentamos, neste cap´ıtulo, as caracter´ısticas b´asicas referente ao seq¨
uenci-amentojob-shopj´a restrito `as caracter´ısticas a que nos propomos estudar. Analisamos, em seguida, alguns modelos matem´aticos e m´etodos de resolu¸c˜ao comumente usados.
1.1
Problemas de F´
abrica
Problemas de f´abrica s˜ao problemas onde se pretende seq¨uenciar a execu¸c˜ao
das opera¸c˜oes necess´arias `a confec¸c˜ao de determinados produtos que passam por
m´aqui-nas distintas ou n˜ao (Alves [3]) com o objetivo de minimizar o tempo de produ¸c˜ao.
Neste caso, as m´aquinas constituem os recursos a serem compartilhados e os servi¸cos
(jobs) s˜ao as opera¸c˜oes realizadas na produ¸c˜ao de cada item.
Uma m´aquina pode realizar apenas uma opera¸c˜ao de cada vez. Desta forma,
a execu¸c˜ao de opera¸c˜oes nas m´aquinas devem ser planejadas a fim de evitar a
sobre-posi¸c˜ao numa mesma m´aquina num dado instante. O seq¨uenciamento dos problemas
de f´abrica resulta geralmente na procura de seq¨uˆencias de opera¸c˜oes sobre as m´aquinas.
Podemos considerar problemas de f´abrica em que as opera¸c˜oes podem ser
realizadas em qualquer m´aquina (f´abrica com m´aquinas paralelas), casos onde todas as opera¸c˜oes s˜ao realizadas numa ´unica m´aquina, ou ainda, os casos em que uma
opera¸c˜ao s´o pode ser realizada numa determinada m´aquina (f´abrica com m´aquinas especializadas). Dentre os problemas de f´abrica com m´aquinas especializadas podemos distinguir os seguintes casos principais:
• problema de open-shop- quando as opera¸c˜oes elementares s˜ao independentes, ou seja, a ordem de execu¸c˜ao das opera¸c˜oes de um mesmo trabalho ´e indiferente.
• problema de flow-shop- quando as opera¸c˜oes elementares dos trabalhos s˜ao liga-das por uma mesma ordem total, ou seja, todos os produtos seguem um percurso
unidirecional.
O Problema de Seq¨uenciamento Job-Shop 5
Na pr´atica pode ser que nem todos os produtos estejam dispon´ıveis para serem
processados no instante inicial. Neste caso, os produtos possuem tempos de partida que
definem a sua data de chegada ao ch˜ao da f´abrica. Os tempos de partida dos produtos
s˜ao eventos que n˜ao podem ser previstos, portanto seus requisitos de processamento
tamb´em n˜ao podem ser conhecidos com antecedˆencia. Neste caso o seq¨uenciamento de
tarefas torna-se um problema n˜ao determin´ıstico que deve ser realizado em um per´ıodo
de tempo totalmente aberto, sendo definido como um problema dinˆamico.
Podemos considerar tamb´em o caso em que, uma vez iniciado o processo de
produ¸c˜ao, os recursos utilizados por cada atividade n˜ao podem mais ser alterados at´e
que todos os produtos estejam conclu´ıdos. Nesse sistema ideal, todos os recursos est˜ao
sempre dispon´ıveis no in´ıcio do per´ıodo de seq¨uenciamento, e n˜ao existe a
possibili-dade de interrup¸c˜ao do processo ora iniciado. Problemas com estas caracter´ısticas s˜ao
conhecidos como problemas est´aticos, e, apesar de serem pouco prov´aveis em situa¸c˜oes
reais, o seu estudo ´e de fundamental importˆancia para o desenvolvimento de t´ecnicas
eficazes para a solu¸c˜ao de problemas dinˆamicos.
1.2
O Problema de Seq¨
uenciamento Job-Shop
Neste trabalho trataremos o problema de job-shop de um ponto de vista industrial. Teremos como recurso b´asico a utiliza¸c˜ao de m´aquinas capazes de executar
apenas uma tarefa de cada vez, sendo por este motivo, consideradas como recursos
disjuntivos. Geralmente, chama-se a confec¸c˜ao de certo produto, de trabalho (job). As opera¸c˜oes de um mesmo trabalho s˜ao organizadas em seq¨uˆencias conhecidas por gama operat´oria.
Podemos classificar o problema a que nos propomos lidar como um problema
de job-shopest´atico e determin´ıstico com m´aquinas especializadas, pois estaremos su-pondo que todos as informa¸c˜oes sejam conhecidas antecipadamente (est´atico) e os dados perfeitamente determinados (determin´ıstico). As m´aquinas s˜ao consideradas especiali-zadas pois cada produto possui uma lista de opera¸c˜oes com uma seq¨uˆencia pr´e-definida.
O Problema de Seq¨uenciamento Job-Shop 6
estando dispon´ıveis todo o per´ıodo de atividade, mas n˜ao podendo executar mais de
uma tarefa ao mesmo tempo. Consideraremos tamb´em que n˜ao existe prioridade na
execu¸c˜ao de determinada tarefa; assim n˜ao ser´a poss´ıvel interromper a execu¸c˜ao de
uma opera¸c˜ao para realiza¸c˜ao de outra.
Quanto aos produtos, consideraremos produtos independentes sem prioridades
na execu¸c˜ao de suas opera¸c˜oes. Cada produto dever´a ser processado em dada m´aquina
uma ´unica vez e eles dever˜ao respeitar uma ordem de execu¸c˜ao dentro da gama
ope-rat´oria. Al´em disto, consideraremos que os produtos chegam na unidade produtiva
num mesmo instante.
Estudaremos casos de unidades fabris contendome m´aquinas distintas e p pro-dutos. Cada produtoPi ´e constitu´ıdo depi opera¸c˜oes elementares. Desta forma, numa f´abrica ser˜ao executadas p0 =
p
X
i=1
pi opera¸c˜oes, cada uma delas sendo realizada em uma m´aquina diferente Mk.
O n´umero total de opera¸c˜oes que ´e executada em uma m´aquina Mk ser´a de-notado por mek. A dura¸c˜ao de execu¸c˜ao de uma opera¸c˜aoOj em Mk ser´a chamada de
tempo operat´orio e denotada por dj. Durante este tempo, a m´aquina estar´a ocupada e todas as outras opera¸c˜oes nesta m´aquina ter˜ao que aguardar para serem processadas.
Assim, toda opera¸c˜ao em uma m´aquina ter´a seu tempo de in´ıcio de processamento
denotado por tj que depende do instante de finaliza¸c˜ao da opera¸c˜ao precedente nesta m´aquina. O instante de t´ermino de execu¸c˜ao de uma opera¸c˜ao Oj ser´a denotado por
Cj, sendo Cj =tj+dj.
Os problemas de seq¨uenciamento job-shop, que denotaremos por Πj s˜ao cons-titu´ıdos por:
• P ={Pi|i= 1, ..., p} - o conjunto de p produtos (ou trabalhos) Pi.
• M={Mk|k= 1, ...,me}- o conjunto de me m´aquinasMk.
• O ={Oj|j = 1, ..., p0} - o conjunto de todas as opera¸c˜oes Oj.
Para tornar mais claras as defini¸c˜oes aqui vistas, apresentaremos um exemplo
O Problema de Seq¨uenciamento Job-Shop 7
p= 4 e p0= 11 me = 3
p1=p2=p3= 3, p4= 2 me1=me2= 3, me3= 2
produto opera¸c˜ao dura¸c˜ao m´aquina
1 1 3 2
1 2 3 3
1 3 1 1
2 4 3 3
2 5 2 2
2 6 3 1
3 7 1 2
3 8 4 1
3 9 4 3
4 10 4 1
4 11 3 2
Tabela 1.1:Dados do problema-exemplo 1 de job-shop.
1.2.1
Modelagem por grafos disjuntivos
Os problemas de job-shoptamb´em podem ser descritos atrav´es de uma mode-lagem por grafos conforme proposto por Balas et al. [1]. Consideremos ent˜ao o grafo
disjuntivo G = (V,C ∪ D), onde:
• V ´e um conjunto de n´os que representam as opera¸c˜oes Oj de cada produto unido a duas opera¸c˜oes fict´ıcias , fonte (O0) e sorvedouro (Of im).
• C ´e o conjunto de arcos conjuntivos que representa a seq¨uˆencia tecnol´ogica das opera¸c˜oes dentro de um mesmo produto, ou seja, a ordem em que as opera¸c˜oes
Oj de um mesmo produto pi devem ser processadas. Cada arco ´e ponderado de acordo com o tempo de execu¸c˜ao da opera¸c˜ao que o origina (Oj).
• D´e o conjunto dos arcos disjuntivos que representam as restri¸c˜oes de capacidade das m´aquinas, cada arco ´e ponderado com o tempo de execu¸c˜ao de sua oper¸c˜ao
respectiva, existem portanto pares de arcos ((Ou →Ov),(Ov →Ou)) que devem ser realizadas na mesma m´aquina Mk.
O Problema de Seq¨uenciamento Job-Shop 8
m´aquina, isto ´e, determinar a precedˆencia entre estas opera¸c˜oes. No modelo de grafo
disjuntivo isto ´e realizado definindo dire¸c˜oes para todos os arcos disjuntivos. Assim,
temos que uma sele¸c˜ao ´e um conjunto de arcos direcionados selecionados de arcos disjuntivos. Por defini¸c˜ao, uma sele¸c˜ao ´e completase todas as disjun¸c˜oes forem seleci-onadas e esta sele¸c˜ao ser´a consistente se o grafo direcionado resultante for ac´ıclico.
MAQUINA 1
1
3
4
2
O
12O
9O
6O
30 0
3
3
1
4
O
4O
7O
103
2
4
3
O
25
O
8O
11O
0O
1O
finO
MAQUINA 2 MAQUINA 3
´ ´ ´
Figura 1.1:Grafo potencial-tarefa representando problema-exemplo 1 de job-shop.
Na figura 1.1 apresentamos o grafo para o problema-exemplo 1. Nele ´e poss´ıvel
ver o conjunto de arcos conjuntivosC representados pelas flechas cont´ınuas e o conjunto de arcos disjuntivosD representados pelas flechas pontilhadas. Cada opera¸c˜ao ´e
repre-sentada por um n´o e os arcos que partem de cada n´o s˜ao ponderados pelo dura¸c˜ao da
opera¸c˜ao correspondente. Neste exemplo todos os produtos s˜ao lan¸cados no instante
0. Uma sele¸c˜ao completa com a defini¸c˜ao de todas as dire¸c˜oes no arcos disjuntivos ´e
representada pela figura 1.2
1.2.2
Representa¸c˜
ao de solu¸c˜
oes pelo diagrama de Gantt
Uma forma ´util para visualizar uma solu¸c˜ao encontrada para um problema de
seq¨uenciamentojob-shop´e o diagrama de Gantt. Este diagrama representa a ocupa¸c˜ao das m´aquinas em fun¸c˜ao do tempo. A constru¸c˜ao deste diagrama ´e feita associando
O Problema de Seq¨uenciamento Job-Shop 9 MAQUINA 1 1 3 4 2
O
12O
9O
6O
30 0 3 3 1 4
O
4O
7O
103
2
4
3
O
2O
5O
8O
11O
0O
1O
finMAQUINA 2 MAQUINA 3
´ ´ ´
Figura 1.2:A representa¸c˜ao de uma sele¸c˜ao completa ac´ıclica para o problema-exemplo de job-shop.
retˆangulos localizados nesta barra. Os retˆangulos possuem o comprimento proporcional
`a dura¸c˜ao da opera¸c˜ao que representa e a posi¸c˜ao que ocupa na barra ´e definida pelo
instante de in´ıcio da respectiva opera¸c˜ao. A figura 1.3 apresenta o diagrama de Gantt
para o problema-exemplo 1 de job-shop onde ´e poss´ıvel constatar a superioridade da segunda solu¸c˜ao (S2) com tempo total de produ¸c˜ao igual a 13 unidades de tempo em rela¸c˜ao `a primeira (S1) com tempo total de produ¸c˜ao igual a 33 unidades de tempo.
tempo tempo M1 M2 M3 C max C max
Solucao S1 0 0 33 13 M3 M2 M1 P2 P3 P4 P1 P2 P3 P4 P1 : = 33
1
: = 13 2 Solucao S2
´ ´
~ ~
Formula¸c˜ao Matem´atica para o Job-Shop 10
1.3
Formula¸c˜
ao Matem´
atica para o Job-Shop
As restri¸c˜oes disjuntivas introduzem um espa¸co de busca n˜ao convexo para
seq¨uenciamentojob-shop. A lineariza¸c˜ao destas restri¸c˜oes pode ser feita acrescentando-se vari´aveis bin´arias na formula¸c˜ao do problema, obtendo-acrescentando-se um modelo inteiro-misto.
O mesmo problema tamb´em pode ser modelado de forma cont´ınua como um problema
de programa¸c˜ao n˜ao linear. Apresentaremos a descri¸c˜ao de uma proposta de formula¸c˜ao
matem´atica de cada tipo al´em de crit´erios de otimiza¸c˜ao que podem ser considerados.
1.3.1
Crit´
erios de otimiza¸c˜
ao
O objetivo a ser alcan¸cado num problema de seq¨uenciamentojob-shopaplicado ao ch˜ao de f´abrica ´e otimizar o tempo total de produ¸c˜ao. H´a v´arios crit´erios que podem
ser utilizados na otimiza¸c˜ao de tais problemas (Ramos [44]). Um crit´erio de otimiza¸c˜ao
comumente usado ´e a minimiza¸c˜ao da dura¸c˜ao total do seq¨uenciamento denominado
makespane denotado por Cmax, sendo:
Cmax = max 1≤j≤p{Ci}
ondeCi´e o momento de t´ermino de execu¸c˜ao de um produtoPi, ou seja,Ci´e momento do t´ermino de execu¸c˜ao da ´ultima opera¸c˜ao referente a esse produto.
Uma outra forma igualmente ´util de avaliar o tempo de produ¸c˜ao total ´e pela
soma de todos os tempos de in´ıcio de todas as n0 opera¸c˜oes tj. Esta forma apresenta como crit´erio de otimiza¸c˜ao uma fun¸c˜ao linear definida por:
f(t) = p0
X
j=1
tj (1.1)
Existe ainda uma diversidade grande de crit´erios empregados na otimiza¸c˜ao
de um problema de job-shop. Uma descri¸c˜ao destes crit´erios pode ser encontrada no trabalho de Ramos [44]. Neste trabalho estaremos utilizando como crit´erio de
otimiza¸c˜ao a soma dos tempos de in´ıcio das opera¸c˜oes conforme fun¸c˜ao (1.1) pela
Formula¸c˜ao Matem´atica para o Job-Shop 11
1.3.2
Modelo de programa¸c˜
ao linear com vari´
aveis bin´
arias
Uma forma comumente encontrada para tratar as restri¸c˜oes disjuntivas ´e o uso
de vari´aveis bin´arias. Uma das propostas de modelagem desta natureza ´e a feita por
Manne e citado por Thompson, et al [55] que define uma nova vari´avel bin´aria para
cada par ordenado de opera¸c˜oes utilizando a mesma m´aquina. Esta vari´avel em 0-1 ´e
denotada por yuv, tal que:
yuv=
1, seOv precedeOu sobre Mk 0, se Ou precede Ov sobre Mk.
Este modelo tamb´em utiliza um limite superior B para dura¸c˜ao total do seq¨uenciamento. Este limite pode ser, por exemplo, a soma de todos os tempos
ope-rat´orios das opera¸c˜oes do problema:
B = p0
X
j=1;
dj. (1.2)
As restri¸c˜oes do problema podem ser expressas pelas equa¸c˜oes:
h
tj+1 ≥ tj +dj, ∀j ∈ C (1.3)
h
tv ≥ tu+du−B(yuv), ∀(u, v)∈ D (1.4)
h
tu ≥ tv+dv −B(1−yuv), ∀(v, u)∈ D (1.5)
As restri¸c˜oes (1.3) representam as restri¸c˜oes da gama operat´oria. As restri¸c˜oes
(1.4) e (1.5) representam as restri¸c˜oes disjuntivas. Neste modelo, para cada escolha de
um par de arcos disjuntivos, somente uma das restri¸c˜oes (1.4) e (1.5) ´e ativada. Assim,
quando se escolher fazer Ou antes de Ov (yuv vale 0) a restri¸c˜ao (1.5) ´e ent˜ao inativa j´a que tu ≥ tv +dv −B, e da forma em que B foi definida (como
p0
X
j=1
dj) o segundo termo desta inequa¸c˜ao ser´a sempre negativo e, como consideramos todos os tempos de
in´ıcio sendo positivos, esta restri¸c˜ao fica inutilizada. Por outro lado, a restri¸c˜ao (1.4) ´e
ativada j´a que torna-se
Formula¸c˜ao Matem´atica para o Job-Shop 12
Neste caso o makespan pode facilmente ser obtido acrescentando-se uma nova
vari´avel (tf im) para representar o momento de t´ermino de toda a produ¸c˜ao e o seguinte conjunto de restri¸c˜oes:
h
tf im ≥ tj+dj, ∀j ∈ O
Dessa forma um problema de seq¨uenciamento job-shopΠj pode ser escrito como:
M in. f(t) = tf im
S.a. tj +dj −tj+1 ≤0 ∀(j, j + 1)∈ C
tu+du−B(yuv)≤tv ∀(u, v)∈ D
tv+dv −B(1−yuv)≤tu ∀(v, u)∈ D
tj+dj ≤tf im ∀j ∈ O
tj ≥0 ∀j ∈ O
Obtemos assim um problema de programa¸c˜ao inteira-mista. A principal
difi-culdade na resolu¸c˜ao desse modelo refere-se `as vari´aveis inteiras (bin´arias). Uma forma
comum na resolu¸c˜ao desse modelo consiste na jun¸c˜ao de um m´etodo de
Branch-and-Bound com o m´etodo simplex.
1.3.3
Modelo de programa¸c˜
ao n˜
ao-linear
O modelo proposto por Pinson [42] agrupa em uma ´unica equa¸c˜ao quadr´atica
as duas equa¸c˜oes disjuntivas para cada par de opera¸c˜ao numa mesma m´aquinaMk. As restri¸c˜oes deste modelo s˜ao representadas pelas equa¸c˜oes:
tj+dj ≤ tj+1 , ∀j∈ C (1.7)
(tv−tu+dv)(tu−tv +du)≤0, ∀(u, v)∈ D (1.8) As restri¸c˜oes (1.7) representam as restri¸c˜oes da gama operat´oria. As restri¸c˜oes
(1.8) representam as restri¸c˜oes disjuntivas das m´aquinas. Essas restri¸c˜oes disjuntivas
introduzem um espa¸co de busca cont´ınuo mas n˜ao conexo.
Acrescentando a este conjunto de restri¸c˜oes o crit´erio de otimalidade expresso
pela fun¸c˜ao (1.1) obtemos o seguinte problema de programa¸c˜ao n˜ao-linear para um
M´etodos de Resolu¸c˜ao para o Job-Shop 13
M in. f(t) = n0
X
j=1
tj
S.a. tj +dj −tj+1 ≤0 ∀j ∈ C (tv−tu+dv)(tu−tv+du)≤0 ∀(u, v)∈ D
tj ≥0 ∀j ∈ O
(1.9)
Modelos de programa¸c˜ao n˜ao linear e n˜ao convexo tˆem sido evitados em fun¸c˜ao
das dificuldades encontradas na busca de solu¸c˜ao por m´etodos tradicionais [57]. O
m´etodo de pontos interiores ´e uma ferramenta capaz de superar este problema conforme
apresentado na se¸c˜ao 2.3.
1.4
M´
etodos de Resolu¸c˜
ao para o Job-Shop
A solu¸c˜ao de um problema de seq¨uenciamento job-shop pode ser obtida por m´etodos exatos, mas devido a sua complexidade (NP-dif´ıcil) em muitos casos s´o ´e
vi´avel o uso de m´etodos que buscam solu¸c˜oes aproximadas para a obten¸c˜ao de boas
solu¸c˜oes em tempo ´util para fundamentar as decis˜oes a tomar no dia-a-dia na ind´ustria.
M´etodos de decomposi¸c˜ao s˜ao tamb´em aplic´aveis a problemas de job-shop na medida em que reduzem a dimens˜ao do problema a ser resolvido.
1.4.1
M´
etodos exatos
M´etodos de solu¸c˜ao exatos s˜ao aqueles que pretendem obter a solu¸c˜ao ´otima
para um problema no menor tempo poss´ıvel.
Entre os m´etodos de solu¸c˜ao exata aplic´aveis a problemas de otimiza¸c˜ao
com-binat´oria o mais usado ´e o m´etodo de parti¸c˜ao e avalia¸c˜ao sucessivas (Branch and
Bound). Encontramos diversos trabalhos nesta dire¸c˜ao dentre os quais podemos
des-tacar os trabalhos de Carlier e Pinson ([12], [13]).
As t´ecnicas de programa¸c˜ao matem´aticas tamb´em s˜ao m´etodos exatos, mas
M´etodos de Resolu¸c˜ao para o Job-Shop 14
seu uso sistem´atico em casos como o do seq¨uenciamentojob-shopdevido a sua comple-xidade (Np-Dif´ıcil). Nesta dire¸c˜ao, temos os trabalhos de Schall et al ([51], [48], [49],
[50]) que utilizam t´ecnicas de programa¸c˜ao matem´atica de forma h´ıbrida com m´etodos
heur´ısticos aplic´aveis ao seq¨uenciamento job-shop modelado de forma linear com o uso de vari´aveis bin´arias. Particularmente, usa t´ecnicas de programa¸c˜ao matem´atica
tendo o m´etodo de pontos interiores (MPI) como principal ferramenta de resolu¸c˜ao.
As heur´ısticas utilizadas de forma h´ıbrida com o (MPI) nestes trabalhos s˜ao: simulated annealing e algoritmos gen´eticos. Tais algoritmos s˜ao descritos brevemente na se¸c˜ao seguinte.
1.4.2
M´
etodos heur´ısticos
Os m´etodos de solu¸c˜ao aproximada (heur´ısticas) permitem obter planos opera-cionais aceit´aveis em tempo ´util, mas n˜ao garantem a obten¸c˜ao de uma solu¸c˜ao ´otima.
Dentre os diversos m´etodos aplic´aveis ao job-shop, os mais utilizados s˜ao os m´etodos de lista devido a sua simplicidade. Estes m´etodos s˜ao baseados em regras de
despacho priorit´ario ou algoritmos de lista (Blazewicz et al.[10], Blazewicz [11]) onde o
plano operacional ´e constru´ıdo atrav´es de uma seq¨uˆencia de decis˜oes baseadas no que
localmente parece ser ´otimo. Alguns algoritmos conhecidos s˜ao:
• SPT(Shortest Processing Time) - Seleciona a opera¸c˜ao com menor tempo de processamento.
• EDD (Earliest Due-Date) - Seleciona a opera¸c˜ao que pertence `a tarefa cuja data de entrega ´e a mais pr´oxima.
• FIFO (First In First Out) - Seleciona a opera¸c˜ao na ordem crescente de chegada nas m´aquinas.
• MWKR (Most WorK Remaining) - Seleciona a opera¸c˜ao que pertence ao produto que tem o tempo de processamento restante maior.
M´etodos de Resolu¸c˜ao para o Job-Shop 15
O m´etodo heur´ıstico conhecido por Simulated Annealing faz uma analogia entre a otimiza¸c˜ao combinat´oria e a evolu¸c˜ao do equil´ıbrio t´ermico dos s´olidos. No
caso particular do job-shop, busca-se um procedimento iterativo, onde a solu¸c˜ao do problema desempenha o papel do estado energ´etico do s´olido. Como mencionado na
se¸c˜ao anterior Schall et al ([50], [51]) prop˜oem uma hibrida¸c˜ao do simulated annealing
juntamente com m´etodo de pontos interiores para a resolu¸c˜ao de problemas de job-shop.
Um outro m´etodo heur´ıstico utilizado ´e denominado como Shifting Bottleneck
e foi desenvolvido por Adams et al [1] e consiste em um m´etodo iterativo baseado no
grafo disjuntivo. Em cada itera¸c˜ao ´e resolvido um problema relaxado de planejamento
em uma ´unica m´aquina com datas de disponibilidade e de entrega, de modo a seq¨uenciar
as m´aquinas que formam o problema dejob-shop. Assim as m´aquinas s˜ao seq¨uenciadas uma de cada vez, seq¨uencialmente.
Al´em destes m´etodos aqui mencionados, vale ressaltar trabalhos realizados com
m´etodos de busca adaptativos como os algoritmos gen´eticos (AG) . Estes algoritmos
tˆem sido aplicados com sucesso a problemas combinat´orios. Seu modelo ´e constitu´ıdo
por uma popula¸c˜ao de indiv´ıduos que s˜ao solu¸c˜oes potenciais. Os AG combinam o
intercˆambio de informa¸c˜oes e a sobrevivˆencia dos melhores indiv´ıduos, representados
por cadeias estruturadas. Dentre os diversos trabalhos nesta ´area podemos citar os
trabalhos de Goldberg [25], Yamada e Nakano [58] que s˜ao aplicados a problemas de
seq¨uenciamento job-shop.
1.4.3
M´
etodos de decomposi¸c˜
ao
O princ´ıpio geral destes m´etodos ´e o de substituir a resolu¸c˜ao de um problema
inicial complexo pela resolu¸c˜ao de v´arios subproblemas cuja resolu¸c˜ao seja mais f´acil.
A conseq¨uente redu¸c˜ao da dimens˜ao ´e particularmente importante quando o problema
tem uma complexidade elevada como o caso do job-shop.
Dentre os m´etodos de decomposi¸c˜ao aplicados aojob-shop temos os trabalhos de Fischer ([19], [20]) que utiliza os multiplicadores de Lagrange para formar o dual
res-Conclus˜ao 16
tri¸c˜oes de produto (precedˆencia), e o problema mestre fica encarregado das restri¸c˜oes
de m´aquina obtendo os multiplicadores de Lagrange de modo a manter a factibilidade.
Num outro trabalho, Fischer [21] prop˜oe uma metodologia que realiza um procedimento
pr´oximo da Relaxa¸c˜ao Lagrangeana cl´assica.
M´etodos de decomposi¸c˜ao espacial s˜ao aplicados a problemas de job-shop de grande dimens˜ao reagrupando m´aquinas em c´elulas de produ¸c˜ao e os produtos em
fam´ıliasde forma que produtos de uma mesma fam´ılia sejam executados por m´aquinas de uma c´elula principal e, excepcionalmente, sejam executados em m´aquinas de outras
c´elulas. Estas opera¸c˜oes que s˜ao executadas em outras c´elulas s˜ao conhecidas como
elementos residuais. Esta filosofia ´e conhecida como tecnologia de grupos (Kusiak [33]).
Recentemente temos a proposta de Alves [3] que utiliza a tecnologia de grupos
para particionar o problema dejob-shope, em seguida, utiliza a t´ecnica da relaxa¸c˜ao la-grangeana para resolver os subproblemas coordenados por um problema mestre. Neste
caso os subproblemas se aproximam do problema original j´a que as restri¸c˜oes a
se-rem relaxadas s˜ao apenas as referentes ao elementos residuais. Assim, a factibilidade
das solu¸c˜oes locais ´e garantida de forma mais eficiente. Com o objetivo de tornar
a convergˆencia nesta metodologia mais r´apida, Ramos [44] prop˜oe ajustes de alguns
parˆametros no m´etodo do subgradiente quando utilizado para resolver o problema
mes-tre.
Ainda h´a que ressaltar o trabalho de Santana [46] que prop˜oe a decomposi¸c˜ao
de um problema de job-shop usando o m´etodo de Dantzig-Wolfe.
Conclus˜
ao
Neste cap´ıtulo apresentamos um importante problema de f´abrica conhecido
Conclus˜ao 17
Neste trabalho estaremos adotando um modelo cont´ınuo (§1.3.3) devido `a boa
performance apresentada pelo m´etodo de pontos interiores na resolu¸c˜ao de problemas de programa¸c˜ao n˜ao linear, como ´e o caso. Vamos nos deter agora a uma an´alise deste
m´etodo e suas principais aplica¸c˜oes. A seguir, no cap´ıtulo 3, veremos que o problema
Cap´ıtulo 2
M´
etodo de Pontos Interiores
O m´etodo de pontos interiores (MPI) tem sido em programa¸c˜ao matem´atica
uma das mais interessantes ´areas de pesquisa em otimiza¸c˜ao desde o desenvolvimento
do m´etodo simplex conforme Freund e Mizuno[22]. Diversas formula¸c˜oes de MPI foram
propostas inicialmente tendo em mente problemas de programa¸c˜ao linear (Karmarkar
[31], Mehrotra [38], Renegar [45], Wright [57]). Motivados pelo sucesso do MPI para
programa¸c˜ao linear tiveram in´ıcio as investiga¸c˜oes de poss´ıveis extens˜oes para
proble-mas de programa¸c˜ao n˜ao linear (Akrotirianakis e Rustem [4],El Bakry, et al. [17],
Granville [27], Vanderbei e Shanno [56]).
Neste cap´ıtulo fazemos uma breve descri¸c˜ao da relevˆancia do m´etodo de pontos
interiores no ˆambito da busca de solu¸c˜ao de problemas de otimiza¸c˜ao. Apresentamos
inicialmente uma breve vis˜ao hist´orica do MPI acompanhado de diversas possibilidades
de aplica¸c˜ao `as mais variadas ´areas. Seguimos apresentando uma descri¸c˜ao sucinta do
MPI aplicado a problemas de programa¸c˜ao linear. Finalmente, conclu´ımos com a
apresenta¸c˜ao de duas vers˜oes do MPI aplicado a problemas gerais de programa¸c˜ao n˜ao
M´etodo de Pontos Interiores 19
2.1
O M´
etodo de Pontos Interiores: Ontem e Hoje
2.1.1
Breve hist´
orico
No ano de 1984 N. Karmarkar [31] apresentou `a comunidade cient´ıfica um novo
algoritmo para resolver problemas de programa¸c˜ao linear em tempo polinomial. Uma
caracter´ıstica de tal algoritmo ´e o fato de chegar a uma solu¸c˜ao ´otima para o problema
caminhando atrav´es de pontos interiores da regi˜ao vi´avel ao contr´ario do algoritmo
simplex, que a atinge gerando uma seq¨uˆencia de pontos extremos adjacentes. O artigo
de Karmarkar [31], e trabalhos anteriores reconhecidos posteriormente, deram in´ıcio a
um novo campo chamado de m´etodo de pontos interiores.
Nos primeiros anos ap´os o artigo inicial de Karmarkar, os trabalhos em
pro-grama¸c˜ao linear usando pontos interiores centravam suas aten¸c˜oes em algoritmos que
lidavam com o problema primal, possuindo uma implementa¸c˜ao mais amena que o
m´etodo original e tendo melhores limites de complexidade. Neste per´ıodo ´e not´avel a
contribui¸c˜ao do algoritmo de Renegar [45], que usou um limite superior para a fun¸c˜ao
objetivo obtendo sucessivamente subconjuntos do conjunto fact´ıvel, cada um contendo
uma solu¸c˜ao, e usando o m´etodo de Newton para analisar o centro deste subconjunto
primal ´otimo. Uma nova era foi inaugurada com o artigo de Megiddo [37], que descreve
uma estrutura para um algoritmo primal-dual. O ponto de vista primal-dual mostrou
ser extremamente produtivo. Isto levou a novos algoritmos com interessantes propostas
te´oricas, formando uma base para algoritmos melhores, e extens˜oes para programa¸c˜ao
convexa e complementariedade linear. Em 1989, Mehrotra [38] descreve um algoritmo
pr´atico para programa¸c˜ao linear que se tornou a base para a maioria dos softwares
existentes; seu trabalho ´e publicado em 1992.
Os trabalhos em torno do m´etodo de pontos interiores tiveram um maior
´ımpeto ap´os o reconhecimento de solu¸c˜oes de problemas NP-dif´ıcil obtidas em tempo
polinomial. Os m´etodos que tˆem sido propostos possuem v´arios ingredientes, incluindo
M´etodo de Pontos Interiores 20
2.1.2
Aplica¸c˜
oes do m´
etodo de pontos interiores
Do ponto de vista te´orico v´arias pesquisas tˆem sido conduzidas quanto a
melho-ria da eficiˆencia computacional para programa¸c˜ao linear (LP), programa¸c˜oes quadr´atica
(QP), problemas de complementaridade lineares (LCP) e algumas classes de problemas
de programa¸c˜oes convexos. Outros trabalhos envolvendo m´etodo de pontos interiores
(MPI) est˜ao sendo desenvolvidos para programa¸c˜oes semi-definidas, os quais possuem
uma grande variedade de aplica¸c˜oes em ´areas de controle e otimiza¸c˜ao estrutural.
Pro-grama¸c˜ao semi-definida, tamb´em tem se mostrado ser uma ´area de grande impacto
(Potra e Wright [43]).
´
E poss´ıvel provar a convergˆencia super-linear de algoritmos primal-dual
assu-mindo a independˆencia linear das restri¸c˜oes ativas nas solu¸c˜oes (Potra e Wright [43]).
Esta observa¸c˜ao incitou pesquisas na melhoria das propriedades de convergˆencia de
outros algoritmos, notavelmente programa¸c˜ao quadr´atica. Aplica¸c˜oes `a programa¸c˜ao
quadr´atica apresentam-se como uma ´area promissora devido a habilidade superior que
a aproxima¸c˜ao por pontos interiores possui ao explorar a estrutura deste problema.
Como exemplo tem-se, dentre outros, o trabalho de Castro [15] que prop˜oe o MPI
para resolu¸c˜ao de problemas de multifluxo de produtos (MFP) com uma formula¸c˜ao
quadr´atica e verifica um melhor desempenho que o mesmo m´etodo aplicado `a
modela-gem linear do mesmo problema.
O MPI tem permitido obter resultados eficientes para problemas de
pro-grama¸c˜ao n˜ao linear, o que tem levado muitos pesquisadores a se dedicarem a esta ´area
(Akrotirianakis e Rustem [4], El Bakry et al. [17], Granville [27], Vanderbei e Shanno
[56]). Em particular, existe um grande n´umero de trabalhos que aplicam o MPI na
resolu¸c˜ao de problemas de fluxo de potˆencia que ´e um problema de programa¸c˜ao n˜ao
linear, n˜ao convexo e de grande porte. Dentre estes, temos os de Sousa e Costa que,
num primeiro trabalho, apresentam um problema de fluxo de potˆencia ´otima resolvido
via MPI primal-dual com barreira logar´ıtmica (Sousa e Costa [53]) e, em outro trabalho
(Sousa e Costa [54]), ´e proposta a determina¸c˜ao das barras para aloca¸c˜oes de reativos
a partir de uma an´alise dos multiplicadores de Lagrange associados `as restri¸c˜oes de
M´etodo de Pontos Interiores 21
resolvido pelo m´etodo apresentado no artigo anterior. Castronuovo et al [16] apresenta
um m´etodo baseado na centraliza¸c˜ao da trajet´oria da solu¸c˜ao ´otima onde a distˆancia
entre a solu¸c˜ao corrente e o passo central ´e monitorada.
Problemas de programa¸c˜ao inteira tamb´em podem ser resolvidos com o aux´ılio
de MPI. Nesta linha temos uma s´erie de trabalhos de Schall et al ([51], [47], [48], [49],
[50]) que estuda a resolu¸c˜ao de problemas lineares inteiros fazendo uma hibridiza¸c˜ao de
m´etodos exatos (MPI) com outras heur´ısticas tais como: algoritmo gen´etico ,simulated annealing e scatter search. Em particular, em trabalho publicado em 1999 (Schall et al [51]) ´e apresentada uma compara¸c˜ao dos m´etodos discutidos nos artigos anteriores
bem como uma proposta de aplica¸c˜ao a problemas de seq¨uenciamento job-shop.
Outra aplica¸c˜ao freq¨uente ´e o uso de MPI na resolu¸c˜ao de problemas de fluxos
em redes de multi-produtos (MFP). Os fluxos em redes de multi-produtos podem ser
usados em diversos campos, como telecomunica¸c˜oes, transportes e log´ıstica. Neste
tipo de problema diversos produtos devem ser transportados de um conjunto de n´os
de produ¸c˜ao para um conjunto de n´os de consumo compartilhando a mesma rede de
transporte. Este tipo de problema normalmente tem um grande n´umero de vari´aveis.
Um trabalho interessante de Azevedo et al [5] prop˜oe a resolu¸c˜ao de uma modelagem
por grafos explorando os diferentes graus de esparsidade do problema com o uso de
MPI . Nesta mesma linha h´a outros trabalhos como o de Castro [14].
O MPI permanece uma ´area ativa e frut´ıfera de pesquisa. Sobretudo, ´e poss´ıvel
notar a grande diversidade das aplica¸c˜oes deste m´etodo de resolu¸c˜ao.
2.1.3
O m´
etodo de pontos interiores versus m´
etodo simplex
Diversos autores tentaram comparar implementa¸c˜oes de algoritmos de pontos
interiores com o m´etodo simplex, mas n˜ao obtiveram tempo de solu¸c˜ao competitivo.
Com a implementa¸c˜ao do m´etodo primal apresentado por Karmarkar apresenta-se a
primeira evidˆencia computacional de que MPI pode ser comparado em velocidade com
o m´etodo simplex.
M´etodo de Pontos Interiores 22
realizadas com resultado superior ao do m´etodo simplex, n˜ao necessariamente para
cada problema individual, mas para um conjunto de problemas. De forma pr´atica, para
problemas pequenos o m´etodo simplex tem rendimento satisfat´orio. O MPI justifica-se
particularmente em problemas com grande n´umero de vari´aveis e maior complexidade
computacional (Wright [57]).
Um exemplo pr´atico onde o MPI possui consider´avel superioridade sobre o
m´etodo simplex ´e no planejamento do tratamento de cˆancer por radioterapia onde s˜ao
usados modelos de programa¸c˜ao linear. Conforme Barbosa [7] neste caso o desafio
matem´atico consiste em programar a emiss˜ao de uma alta dosagem de radia¸c˜ao no
tumor, e simultaneamente, minimizar a radia¸c˜ao nas regi˜oes vizinhas compostas por
tecido saud´avel. Na presen¸ca de m´ultiplas solu¸c˜oes o MPI convergir´a para aquelas
solu¸c˜oes distanciadas dos v´ertices o que n˜ao ocorre com o m´etodo simplex. Para este
modelo uma solu¸c˜ao pr´oxima do v´ertice pode n˜ao ser a mais adequada do ponto de
vista m´edico pelo fato das vari´aveis de folga estarem no seu limite, significando que em
determinadas partes tecido saud´avel receber´a uma dosagem grande de radia¸c˜ao.
Uma vantagem adicional do MPI ´e a possibilidade de trabalhar com pontos
infact´ıveis durante o processo de otimiza¸c˜ao, facilitando a identifica¸c˜ao de modelos mal
formulados (Wright [57]).
2.1.4
M´
etodos de decomposi¸c˜
ao e m´
etodo de pontos interiores
Usar a aproxima¸c˜ao por ponto interior nos m´etodos de decomposi¸c˜ao parece
ser promissor, ainda que n˜ao estejam sendo feitos estudos comparativos rigorosos nesta
´area (Potra e Wright [43]).
Nos m´etodos de decomposi¸c˜ao para problemas lineares e convexos de grande
porte, como a decomposi¸c˜ao de Dantzig-Wolfe, m´etodo de pontos interiores tem sido
usado para descobrir uma solu¸c˜ao para o problema master, ou para obter uma solu¸c˜ao aproximada para os subproblemas gerando pontos de teste. Zhao [60] mostra que
o algoritmo de pontos interiores com a decomposi¸c˜ao Dantzing-Wolfe ´e globalmente
M´etodo de Pontos Interiores 23
resultados quando o m´etodo de pontos interiores ´e usado como meio de resolu¸c˜ao de
um problema master na aproxima¸c˜ao por decomposi¸c˜ao e aplica sua metodologia a um
problema de multifluxo de produtos de grande porte (5.000 arcos e 10.000 produtos).
2.2
O M´
etodo de Pontos Interiores para Programa¸c˜
ao
Linear
Apesar de boa parte dos modelos matem´aticos atuais serem n˜ao lineares,
for-mula¸c˜oes de modelos lineares s˜ao vantajosas tendo em vista a qualidade dos softwares
`a disposi¸c˜ao e a garantia da convergˆencia para um m´ınimo global. Portanto, entender o
m´etodo de pontos interiores aplicado a problemas de programa¸c˜ao linear permite uma
boa vis˜ao geral deste m´etodo.
Consideremos um problema de programa¸c˜ao linear formulado na forma padr˜ao:
Minimizar cTx
Sujeito a A·x = b x ≥ 0
(2.1)
ondecexs˜ao vetores doRn,b´e um vetor doRmeA´e uma matrizm×n. Aqui vale ressaltar que estamos considerando pontos interiores aqueles pontos que atendam
estritamente as restri¸c˜oes do problema (2.1), ou seja, pontos em que x >0.
Associado com cada problema de programa¸c˜ao linear primalexiste uma outra programa¸c˜ao linear chamada de dual. O dual para (2.1):
Maximizar bTλ
Sujeito a At·λ+s = c
s ≥ 0
(2.2)
onde λ ´e um vetor deRm e s´e um vetor Rn. N´os chamamos as componentes deλ de vari´aveis do dual enquantos ´e o vetor das vari´aveis de folga.
M´etodo de Pontos Interiores 24
Teorema 2.1. Considere o vetor x de (2.1) e (λ, s) de (2.2) , ent˜ao temos que:
bTλ ≤cTx
Em outras palavras, o valor da fun¸c˜ao objetivo do dual ´e limitado inferiormente
pelo valor da fun¸c˜ao objetivo do primal e o valor da fun¸c˜ao objetivo do primal ´e limitado
superiormente pelo valor da fun¸c˜ao objetivo dual. As duas fun¸c˜oes objetivo podem ter
o mesmo valor, de forma que
bλ∗ =cx∗
quando x∗ ´e solu¸c˜ao de (2.1) e (λ∗, s∗) ´e solu¸c˜ao de (2.2).
Teorema 2.2. Pelas condi¸c˜oes de otimalidade (kkt) sabe-se que o vetor x∗ ∈ Rn ´e
solu¸c˜ao de (2.1) se e somente se existem vetores s∗ ∈ Rn e λ∗ ∈ Rm que atendem as
seguintes condi¸c˜oes
(i) Atλ+s = c
(ii) Ax = b
(iii) xisi = 0 i= 1,2, ..., n, (iv) (x, s) ≥ 0
(2.3)
considerando (x, λ, s) = (x∗, λ∗, s∗).
Os vetoresλess˜ao geralmente chamados de multiplicadores de Lagrange para as restri¸c˜oes Ax =b e x≥0, respectivamente. A condi¸c˜ao (iii) implica que para cada ´ındice i = 1,2...n uma das componentes xi ou si ´e nula. Esta condi¸c˜ao ´e conhecida
como condi¸c˜ao de complementaridade.
Examinando as condi¸c˜oes (2.3) do ponto de vista do primal e do dual,
con-clu´ımos que:
M´etodo de Pontos Interiores 25
2.2.1
M´
etodo primal-dual
Este m´etodo encontra a solu¸c˜ao primal-dual (x∗, λ∗, s∗) aplicando uma varia¸c˜ao
do m´etodo de Newton nas trˆes equa¸c˜oes das condi¸c˜oes de (2.3) e modificando a busca de
dire¸c˜oes e comprimentos tais que as inequa¸c˜oes (x, s)≥0 sejam estritamente satisfeitas em cada itera¸c˜ao.
Vamos reapresentar as condi¸c˜oes de otimalidade (2.3) de uma forma diferente,
considere a fun¸c˜ao F :R2n+m →R2n+m definida por:
F(x, λ, s) =
Atλ+s−c
Ax−b XSe
= 0
(x, s)≥0
(2.4)
onde:
X =diag(x1, x2, ..., xn)
S =diag(s1, s2, ..., sn)
e= (1,1, ...,1)t
Note que F ´e linear nos dois primeiros termos (Atλ+s−c, Ax−b) e o ´unico termo n˜ao linear desta fun¸c˜ao ´e o termo XSe.
Todos os m´etodos primal-dual geram em cada itera¸c˜ao pontos (xk, λk, sk) que satisfazem estritamente os limites de (2.4), ou seja, xk>0 e sk >0. Esta propriedade ´e a origem do termoponto-interior. Respeitando estes limites o m´etodo evita solu¸c˜oes falsas dadas por pontos que satisfazem F(x, λ, s) = 0 mas n˜ao (x, s) ≥ 0. Solu¸c˜oes falsas n˜ao fornecem nenhuma informa¸c˜ao quanto `a solu¸c˜ao do primal (2.1) ou do dual
(2.2), por isto ´e prefer´ıvel exclu´ı-las completamente da regi˜ao de busca. A maior
parte dos m´etodos de ponto interior requerem que em cada itera¸c˜ao (xk, λk, sk) seja estritamente fact´ıvel, ou seja,(xk, λk, sk)∈ F0, onde:
F0 ={(x, λ, s)|Ax=b, At
λ+s=c,(x, s)>0}
M´etodo de Pontos Interiores 26
origem no m´etodo de Newton que forma um modelo linear para F em torno do ponto corrente e obt´em a dire¸c˜ao de busca (∆x,∆λ,∆s) para a solu¸c˜ao do seguinte sistema de equa¸c˜oes lineares:
J(x0, λ0, s0)
∆x ∆λ ∆s
=−F(x0, λ0, s0)
sendo J o Jacobiano de F. Se o ponto corrente ´e estritamente fact´ıvel, o passo de
Newton torna-se:
O At I
A 0 0
S 0 X
∆x ∆λ ∆s = 0 0 −XSe (2.5)
Um passo completo nesta dire¸c˜ao ´e usualmente n˜ao permitido, j´a que poderia
violar o limite de n˜ao negatividade (x, s)≥0. Para evitar esta dificuldade, caminha-se ao longo da dire¸c˜ao de Newton (2.5), s´o que a nova itera¸c˜ao ´e dada por:
(x, λ, s) +α(∆x,∆λ,∆s) onde α∈(0,1]
Infelizmente quando o ponto corrente est´a pr´oximo ao limites do espa¸co de
busca s´o podemos tomar pequenos passos (α <<1) sem violar a condi¸c˜ao de (x, s)>0, por este motivo o m´etodo de Newton oferece pouco progresso na busca da solu¸c˜ao. ´E
necess´ario, portanto, fazer algumas mudan¸cas no m´etodo de Newton original.
2.2.2
O passo central
O passo centralC pode ser definido como sendo o arco de pontos (xτ, λτ, sτ)∈
F0 parametrizado por um escalar positivo τ. Cada ponto de C satisfaz as condi¸c˜oes abaixo:
(i) Atλ+s = c
(ii) Ax = b
(iii) xisi = τ i= 1,2, ..., n, (iv) (x, s) > 0
M´etodo de Pontos Interiores 27
Essas condi¸c˜oes diferem das condi¸c˜oes KKT (2.3) unicamente pelo termoτ na terceira condi¸c˜ao . Esta ´e a chave para os pontos do arco C, pois cada produto xisi tem o mesmo valor. O passo central, portanto, equilibra o algoritmo primal-dual por
prover uma rota que pode ser seguida dentro do conjunto solu¸c˜ao.
Uma outra forma de definirC ´e usando a nota¸c˜ao de (2.4) e escrever
F(xτ, λτ, sτ) =
0 0 τ e
, (xτ, sτ)>0 (2.7)
A equa¸c˜ao (2.7) se aproxima de (2.4) quando τ tende a zero. Se C converge sempre que τ → 0, esta converge para a solu¸c˜ao primal-dual da programa¸c˜ao linear. O passo central deste modo guia a solu¸c˜ao ao longo de uma rota que evita solu¸c˜oes
indesejadas fixando todo produtoxisi estritamente positivo e decrescendo at´e zero com alguma taxa.
Boa parte dos algoritmos primal-dual fazem passos de Newton em torno de
pontos deC paraτ >0 ao inv´es de um passo de Newton puro paraF. Para descrever a inclina¸c˜ao da dire¸c˜ao de procura, usa-se umparˆametro central σ ∈[0,1] e umamedida de dualidade µ definidos por:
µ= 1
n
n
X
i=1
xisi =
xTs
n
que mensuram um valor m´edio para o produtoxisi. A equa¸c˜ao gen´erica para distˆancia torna-se:
O At I
A 0 0
S 0 X
∆x ∆λ ∆s = 0 0
−XSe+σµe
(2.8)
A distˆancia (∆x,∆λ,∆s) ´e um passo de Newton para o ponto (xσµ, λσµ, sσµ)∈
C, onde todo os produtos (xisi) s˜ao iguais a σµ.
M´etodo de Pontos Interiores 28
s˜ao iguais a µ. No outro extremo, o valor de σ = 0 refere-se ao passo de Newton original (2.5). Muitos algoritmos usam valores intermedi´arios de σ no intervalo (0,1) com a dupla finalidade de reduzirµ e melhorar a centralidade.
´
E poss´ıvel provar que se F0 6= ∅ ent˜ao (2.6) tem solu¸c˜ao (x
τ, λτ, sτ) para cada τ > 0. Mais ainda, as componentes x e s desta solu¸c˜ao s˜ao ´unicas. Para tanto, considere H0 como a proje¸c˜ao deF0 no espa¸co reduzido de vetores (x, s), definido por:
H0 ={(x, s)|(x, λ, s)∈ F0 para algumλ ∈ ℜm
}
e ent˜ao identifique (xτ, sτ) como o menor valor de H0 da fun¸c˜ao barreira definida por
fτ(x, s) = 1
τx
Ts
−
j=1
X
n
log(xjsj)
as componentes x e s s˜ao definidas unicamente se a matriz A tem posto completo. A fun¸c˜ao fτ(x, s) aproxima-se do infinito sempre que (x, s) se aproxima da fronteira de
H0, ou seja, sempre que algum par primal-dual x
jsj se aproxima de zero. Acerca de
fτ tamb´em pode se afirmar (Wright [57]) que:
• fτ ´e estritamente convexa em H0
• fτ ´e limitada por H0
• Dado τ > 0, e algum n´umero K, todos os pontos (x, s) no plano do conjunto
{(x, s)∈ H0|fτ(x, s)≤K} satisfazem
xi ∈[Ml, Mu], si ∈[Ml, Mu], i= 1,2, ..., n sendo Ml, Mu n´umeros positivos.
temos os seguinte teorema apresentado por (Wright [57]):
Teorema 2.3. Suponha queF0 6=∅, e tome um n´umero positivo τ. Ent˜ao f
τ tem um
´
unico m´ınimo local em H0 e as condi¸c˜oes para o passo central (2.6) tˆem solu¸c˜ao.
O passo central tamb´em pode ser definido como uma seq¨uˆencia de valores
m´ınimos de uma fun¸c˜ao de barreira logar´ıtmica para o dual ou para o primal. Na
M´etodo de Pontos Interiores 29
2.2.3
M´
etodos primais
Algoritmos primais tamb´em tˆem sido incorporados a algoritmos para
pro-grama¸c˜ao n˜ao linear da mesma forma que algoritmos primal-dual.
Um elemento importante na maioria dos algoritmos primais ´e a aproxima¸c˜ao
com o uso da fun¸c˜ao barreira logar´ıtmica para (2.1), que ´e definida como:
min x c
Tx
−τ
i=1
X
n
logxi sujeito a Ax=b, x >0 (2.9)
onde τ > 0 ´e um parˆametro positivo. Note que o dom´ınio desta fun¸c˜ao ´e o conjunto de pontos estritamente fact´ıveis para o problema 2.1. Para atender as
condi¸c˜oes de otimalidade a solu¸c˜ao xτ de (2.9) satisfaz as seguintes condi¸c˜oes: (i) τ X−1e+Atλ = c
(ii) Ax = b
(iv) (x, s) > 0
(2.10)
para λ∈Rm. Podemos definir o vetor s por
si =
τ xi
, i= 1,2, ..., n
estas condi¸c˜oes s˜ao transformadas nas condi¸c˜oes do passo central (2.3).
Por-tanto, o valor m´ınimo xτ do subproblema com barreira logar´ıtmica (2.10) ´e simples-mente a componentex do vetor de passo central (xτ, λτ, sτ)∈ C.
Quando τ decresce at´e zero, xτ aproxima-se da solu¸c˜ao x∗ do problema de programa¸c˜ao linear (2.1). Solu¸c˜oes do problema (2.9) para cada valor de τ pode ser formada, por exemplo, pelo uso do m´etodo de Newton.
Algoritmos baseados em fun¸c˜oes de barreira logar´ıtmica n˜ao se tornaram
po-pulares tanto em programa¸c˜ao linear quanto em programa¸c˜ao n˜ao linear, devido a
dificuldade crescente de tornar o parˆametro de barreira τ tender a zero. O interesse neste algoritmo foi reavivado em 1985 quando se notou a rela¸c˜ao entre o algoritmo de
M´etodo de Pontos Interiores Aplicado a Programa¸c˜ao N˜ao Linear 30
Algoritmos de Karmarkar avaliam o progresso na dire¸c˜ao ´otima atrav´es da
m´edia de uma fun¸c˜ao potencial logar´ıtmica. Uma variante da fun¸c˜ao deste algoritmo ´e
(n+ 1)log(cTx−Z)−
n
X
i=1
logxi
ondeZ ´e um limite inferior para o valor objetivo de (2.1), que pode ser obtido durante as itera¸c˜oes pelo uso de informa¸c˜oes do problema dual. Logo ap´os Karmarkar,
Renegar [45] desenvolveu um algoritmo que usa o m´etodo de Newton em conjunto com
uma fun¸c˜ao logar´ıtmica, definida por:
minx−nlog(Z−cTx)− n
X
i=1
xi sujeito a Ax=b, x >0, cTx < Z
(2.11)
ondeZ ´e um limite superior para o valor ´otimoZ∗ do objetivocTxpara (2.1). De fato cada solu¸c˜ao de (2.11) ´e um passo primal central. O algoritmo de Renegar
seguiu este passo usando o m´etodo de Newton para obter solu¸c˜oes aproximadas de
(2.11) numa seq¨uˆencia de valores decrescentes de Z. Ele alcan¸cou um melhor limite de complexidade do que o m´etodo de Karmarkar [31], requerendo O(√nlog1/ǫ) itera¸c˜oes para identificar o ponto primal fact´ıvel xtal que cTx esteja a uma distˆanciaǫdo valor objetivo ´otimo Z∗, para dado ǫ > 0. N˜ao se tem identificado outro m´etodo de pontos
interiores com complexidade melhor do que o apresentado por Renegar.
Apesar do algoritmo de Karmarkar ter se tornado sinˆonimo de m´etodo de
pontos interiores a maior parte dos algoritmos pr´aticos levam em conta a estrutura
primal-dual (Wright [57]).
2.3
M´
etodo de Pontos Interiores Aplicado a
Pro-grama¸c˜
ao N˜
ao Linear
O m´etodo de pontos interiores tem sido muito utilizado tanto em programa¸c˜ao
Um m´etodo primal-dual barreira-logar´ıtmica (PDBL) 31
Granville [27], Sousa e Costa [53][54]). Nesta se¸c˜ao apresentamos uma breve descri¸c˜ao
de uma vers˜ao do m´etodo primal-dual barreira-logar´ıtmica proposto por Vanderbei
e Shanno [56] que ´e uma vers˜ao do m´etodo de pontos interiores bastante utilizada
em programa¸c˜ao n˜ao linear. Em seguida veremos uma vers˜ao de m´etodo de pontos
interiores primal-dual apresentada por Akrotirianakis e Rustem [4] tamb´em ´util.
2.3.1
Um m´
etodo primal-dual barreira-logar´ıtmica (PDBL)
O m´etodo primal-dual barreira-logar´ıtmica (PDBL) aqui apresentado tem como
base o trabalho de Vanderbei e Shanno [56], que permite uma boa vis˜ao do m´etodo
tanto em casos convexos como em casos n˜ao convexos.
Suponha o problema geral de programa¸c˜ao n˜ao linear representado por:
M in. f(t)
S.a. g(t)≥0 (2.12)
Consideremost∈Rn e as fun¸c˜oesf(t) eg(t) sendo duplamente diferenci´aveis. A resolu¸c˜ao do problema (2.12) pelo m´etodo PDBL requer que as restri¸c˜oes de
desi-gualdade se transformem em restri¸c˜oes de idesi-gualdade, o que pode ser feito pela adi¸c˜ao
de vari´aveis de excesso estritamente positivas (s >0). ´E incorporada `a fun¸c˜ao objetivo uma fun¸c˜ao barreira-logar´ıtmica que garante a n˜ao negatividade das vari´aveis de folga.
Assim o problema (2.12) pode ser reescrito assim:
M in. f(t)−µlns
S.a. g(t)−s= 0 (2.13)
Agora temos para µ >0, a seguinte fun¸c˜ao objetivo:
fµ(t, s, µ) =f(t)−µlns (2.14)
A fun¸c˜ao lagrangeana correspondente ao problema (2.13) ´e:
L(t, s, y;µ) =f(t)−µlns−yT(g(t)
Um m´etodo primal-dual barreira-logar´ıtmica (PDBL) 32
As condi¸c˜oes de otimalidade de primeira ordem (KKT) para a equa¸c˜ao (2.15) s˜ao:
∇tL(t, s, y) =∇f(t)−(A(t))Ty= 0
∇sL(t, s, y) = −µe+SY e= 0
∇yL(x, s, y) = (g(t)−s) = 0
(2.16)
onde
A(t) = ∂g(t)∂t que ´e a matriz Jacobiana de g(t)
S ´e uma matriz diagonal contendo as vari´aveis de folga sr;
Y ´e uma matriz contendo na diagonal os elementos yr;
e= (1, ...,1);
∇tf(t) = (1, ...,1).
Observa¸c˜ao 2.1. Note que da segunda equa¸c˜ao de 2.16 decorre que y ≥ 0, sendo consistente com fato de y ser o vetor dos multiplicadores de Lagrange associado com as inequa¸c˜oes relativas ao problema original (2.12).
De forma semelhante ao que foi feito para programa¸c˜ao linear podemos
rees-crever as condi¸c˜oes de KKT para equa¸c˜ao (2.16) como:
F :R2m+n →R2m+n definida por:
F(t, y, s) =
∇f(t)−(A(t))Ty
−µe+SY e
(g(t)−s)
= 0
(t, s)≥0
(2.17)
O m´etodo de Newton (MN) ser´a usado para encontrar as ra´ızes para a fun¸c˜ao
F(t, y, s). Antes de verificar isto, buscaremos encontrar uma fun¸c˜ao de m´erito que seja compat´ıvel com dire¸c˜ao de busca encontrada. A fun¸c˜ao de m´erito ser´a definida com a
´
unica finalidade de guiar e medir o progresso do algoritmo. O objetivo ´e que ela seja
minimizada com a solu¸c˜ao do problema original e, dentro de circunstˆancias adequadas
ela servir´a como uma fun¸c˜ao de descida para o algoritmo, decrescendo o seu valor a