Álgebra Linear II
Licio H. Bezerra
Fermín S. V. Bazán
Universidade Federal de Santa Catarina
Consórcio ReDiSul
Campus Universitário – Trindade Caixa Postal 476
CEP 88040-900 – Florianópolis – SC Reitor: Alvaro Toubes Prata
Vice-Reitor: Carlos Alberto Justo da Silva
Secretário de Educação a Distância: Cícero Barbosa
Pró-Reitora de Ensino de Graduação: Yara Maria Rauh Muller Departamento de Educação à Distância: Araci Hack Catapan Pró-Reitora de Pesquisa e Extensão: Débora Peres Menezes Pró-Reitor de Pós-Graduação: José Roberto O’Shea
Pró-Reitor de Desenvolvimento Humano e Social: Luiz Henrique Vieira Silva Pró-Reitor de Infra-Estrutura: João Batista Furtuoso
Pró-Reitor de Assuntos Estudantis: Cláudio José Amante Centro de Ciências da Educação: Carlos Alberto Marques
Centro de Ciências Físicas e Matemáticas: Méricles Thadeu Moretti Centro de Filosofia e Ciências Humanas: Maria Juracy Filgueiras Toneli
Cursos de Licenciaturas na Modalidade à Distância
Coordenação Acadêmica Matemática: Neri Terezinha Both Carvalho Coordenação de Ambientes Virtuais: Nereu Estanislau BurinCoordenação de Infra-Estrutura e Pólos: Vladimir Arthur Fey
Comissão Editorial
Antônio Carlos Gardel Leitão Albertina Zatelli
Coordenação Pedagógica das Licenciaturas à Distância UFSC/CED/CFM Coordenação: Roseli Zen Cerny
Núcleo de Formação
Responsável: Nilza Godoy Gomes
Núcleo de Criação e Desenvolvimento de Material Responsável: Isabella Benfica Barbosa
Design Gráfico e Editorial: Carlos A. Ramirez Righi, Diogo Henrique Ropelato, Mariana da Silva.
Adaptação Design Gráfico: Diogo Henrique Ropelato, Marta Cristina Goulart Braga, Natal Anacleto Chicca Junior. Produção Gráfica e Hipermídia: Thiago Rocha Oliveira Design Instrucional: Hellen da Silva Zago
Revisão Ortográfica: Tony Roberson de Mello Rodrigues Preparação de Gráficos: Laura Martins Rodrigues Editoração Eletrônica: Laura Martins Rodrigues Núcleo de Pesquisa e Avaliação
Responsável: Claudia Regina Flores
Copyright © 2008, Universidade Federal de Santa Catarina / Consórcio RediSul
Nenhuma parte deste material poderá ser reproduzida, transmitida e gravada, por qualquer meio eletrônico, por fotocópia e outros, sem a prévia autorização, por escrito, da Coordenação Acadêmica do Curso de Licenciatura em Matemática na Modalidade à Distância.
Ficha Catalográfica
B574a
Bezerra, Licio Hernanes
Álgebra Linear II / Licio Hernanes Bezerra, Fermín S. Viloche Bazán . - Florianópolis : UFSC/EAD/CED/CFM, 2005.
91p.
ISBN 978-85-99379-54-7
1.Álgebra linear I. Bazán, Fermín S. Viloche. II. Título. CDU 681.31:51
Sumário
1 Produto Interno ... 9
1.1 Definição e exemplos ... 11
1.2 Norma definida a partir de um produto interno ...14
1.3 Ângulo entre vetores ... 15
1.4 Ortogonalidade ... 16
1.4.1 Método de Gram-Schmidt ... 17
1.5 Projeção ortogonal de um vetor sobre um subespaço vetorial ... 20
1.6 Matrizes ortogonais ... 22
1.7 Reflexões de Householder ... 24
1.8 Matriz de um produto interno em relação a uma base... 28
2 Autovalores e Autovetores de um Operador Linear ... 33
2.1 Autovalores e autovetores ... 35
2.2 Polinômio característico e Polinômio minimal ... 45
2.3 Operadores diagonalizáveis ... 53
2.4 Matrizes hermitianas ... 58
2.5 Transformações unitárias e forma canônica de Schur ...61
3 Formas Multilineares ... 71
3.1 Formas bilineares ... 73
3.1.1 Forma bilinear simétrica: forma quadrática associada ... 76
3.2 Diagonalização de formas quadráticas ... 77
Apresentação
Caro aluno,
A Álgebra Linear desenvolve-se dentro de espaços vetoriais, os quais são estruturas muito simples, que contêm apenas soma e produto por escalar, e é impressionante como a teoria desenvolve-se com tão pou-co. É instigante descobrir como problemas associados ao cotidiano das pessoas são descritos elegantemente pela Álgebra Linear. Problemas como distribuição de energia elétrica, ou de logística para instalação de telefones em grandes cidades, envolvem resolução de sistemas line-ares cujas matrizes são enormes; problemas de compressão de dados, derivados tanto de áudio como de imagem, têm o cálculo de autova-lores como ferramenta básica para sua resolução. A substituição do analógico pelo digital embute a real substituição da realidade físico-química pela simulação matemática.
Pode-se perguntar por que um licenciado aprende Álgebra Linear se ele pretende principalmente atuar em escolas de ensino fundamental e médio. Respondemos a essa questão assim: com a Álgebra Linear, você, licenciando, deixa as portas abertas para o futuro do mento tecnológico, ao mesmo tempo em que solidifica seu conheci-mento do presente para atender às demandas dos vários alunos que lhe encontram, que estão a cada dia mais imersos nesse mundo veloz. Cremos ser possível viver em um mundo natural, com florestas, ani-mais e pessoas tentando viver em harmonia, lendo livros (estes nun-ca serão substituídos por imagens digitais, assim como cinema não é incompatível com teatro), com tempo para o ócio e o prazer, com a Álgebra Linear resolvendo problemas de poluição ambiental, logística de policulturas agrícolas etc.
Finalmente, definimos a noção de formas multilineares para formali-zar rigorosamente o estudo de determinantes.
Dividimos, assim, este livro em três Capítulos: produto interno, auto-valores e formas multilineares. Esperamos que você utilize este livro como um mapa para descobrir um pouco da Álgebra Linear.
Licio H. Bezerra
1
Produto Interno
Neste capítulo, iremos munir um espaço vetorial, que é uma estrutura puramente algébrica, de uma geometria, que nos permite falar de ângulo entre vetores, projetar um vetor ortogonalmente sobre outro, comparar vetores por tamanho etc.
1.1 Definição e exemplos
Quando estudamos vetores no espaço, em Geometria Analítica, somos apresentados ao produto interno de dois vetores u e v, denotado por u v, , o qual é definido por u v, =|| || || || cosu v , em que é o menor ângulo entre os vetores, 0≤ ≤ . A partir dessa definição, demonstram-se algumas propriedades do pro-duto interno: simetria ( u v, = v u, ), positividade ( u u, ≥0 e
, 0 0
u u = ⇔ =u ) e bilinearidade ( ku u v+ ', =k u v, + u v', e
, ' , , '
u kv v+ =k u v + u v ). Uma conseqüência dessas proprieda-des é que, dada
{
i j k , ,}
uma base ortonormal do espaço, se osvetores u e v escrevem-se, nessa base, como u x i1 y j z k1 1
→ → →
= + + e
2 2 2
v x i y j z k
→ → →
= + + , temos que
1 2 1 2 1 2 ,
u v =x x +y y +z z .
Por conseguinte, se w x i y j z k
→ → →
= + + , 2 2 2
||w||= x +y +z .
O conceito de produto interno é generalizado para um espaço ve-torial qualquer de um modo usual em Matemática: a partir da abstração de algumas propriedades de um modelo (no caso, o produto interno de vetores do espaço euclidiano).
Definição: Seja V um espaço vetorial real. Se , :V V× → ℜé uma função tal que
(∀ ∈v V) v v, ≥0
1) e v v, = ⇔ =0 v 0;
(∀v w V, ∈ ) v w, = w v,
(∀v w w, , '∈V)(∀ ∈ℜk ) v kw w, + ' =k v w, + v w, '
3)
então , é dito um produto interno em V .
Observe que uma conseqüência direta do item 3 dessa definição é que o produto interno de um vetor v qualquer com o vetor nulo resulta em zero, pois v, 0 = v, 0.v =0. ,v v =0.
Exemplo 1: Seja n1
V = ℜ× . Sejam u v, ∈ℜn×1,
1 n u u u = , 1 n v v v =
. Va-mos definir u v, =u v1 1+ + u vn n.
É fácil ver que essa função é um produto interno em V, chamado de produto interno usual. Note que u v1 1+ + u vn v é a única
entra-da entra-da matriz T
v u, que é uma matriz 1 1× . Usando o fato de que os espaços vetoriais ℜ1 1× e ℜ são isomorfos, assim como ℜn×1 e ℜn,
podemos escrever que T
v u é o produto interno usual dos vetores u e v, em ℜn.
Exemplo 2: Sejam u=( ,u u1 2) e v=( ,v v1 2) dois vetores do 2 ℜ . Seja
1 1 2 1 1 2 2 2
, 4
u v =u v +u v +u v + u v . Afirmamos que essa função é um produto interno em ℜ2. Para provar isso, temos que verificar se essa função satisfaz os três itens da definição:
2 2 2
1 1 2 1 1 2 2 2 1 1 2 2 1 1 2
, 4 2 4 2
u u =u u +u u +u u + u u =u + u u + u =u + u u +u + = i)
2 2
2 2 3 2
u u u
= + + + = + + = + + + = 2 2
1 2 2
(u u ) 3u 0
= + + ≥ . Além disso, temos que
2 2
1 2 2 1 2 2
, 0 ( ) 3 0 0, 0
u u = ⇔ u +u + u = ⇔ +u u = u = ⇔u = = ⇔ =
1 2
0 u 0,u 0 u 0
= ⇔ + + = ⇔ + = = ⇔ = = ⇔ =
1 1 2 1 1 2 2 2 1 1 2 1 1 2 2 2
, 4 4 ,
u v =u v +u v +u v + u v =v u +v u +v u + v u = v u ii)
1 1 1 2 1 1 1 2 2 2 2 2
, ' ( ' ) ( ' ) ( ' ) 4 ( ' )
u kv v+ =u kv +v +u kv +v +u kv +v + u kv +v = iii)
1 1 1 '1 2 1 2 '1 1 2 1 '2 4 2 2 4 2 '2 ku v u v ku v u v ku v u v k u v u v
= + + + + + + + =
1 1 2 1 1 2 2 2 1 1 2 1 1 2 2 2
( 4 ) ' ' ' 4 '
k u v u v u v u v u v u v u v u v
= + + + + + + + =
, , ' k u v u v
= +
Logo, a função definida anteriormente é um produto interno em 2
Exemplo 3: Sejam u=( ,u u1 2) e v=( ,v v1 2) dois vetores do 2 ℜ . Seja
1 2 2 1 ,
u v =u v +u v . Afirmamos que essa função não é um produto interno em ℜ2, pois, apesar de satisfazer os itens ii e iii da defi-nição, a função não é positiva. Como contra-exemplo, tomemos o vetor u=(1, 1)− : u u, =1.( 1) ( 1).1− + − = − <2 0.
Exemplo 4: Seja V =C a b[ , ] o espaço vetorial das funções reais contínuas em [ , ]a b , a<b. Sejam f e g duas funções de V . Va-mos definir a seguinte função de V V× em ℜ:
, b ( ) ( ) a
f g =
∫
f x g x dx.Note que, como f e g são funções contínuas em [ , ]a b , o seu produto também é contínuo em [ , ]a b e, logo, integrável nesse in-tervalo. Verificamos, facilmente, que as propriedades (ii) e (iii) são satisfeitas por essa função. Para mostrar que (i) é verdadeira, pre-cisamos de um pouco de Análise. A primeira parte de (i) é
satis-feita porque, para toda função contínuaf , b( ( ))2 ( ) a f x dx≥m b a−
∫
,em que m é o valor mínimo de f2 no intervalo [ , ]a b . Para mos-trar que f f, = ⇒ =0 f 0 (a recíproca é óbvia), vamos supor que f ≠0. Assim, como f é contínua, existe um intervalo [ , ]c d , c<d, contido em [ , ]a b , tal que f x( )≠0 para todo x∈[ , ]c d . Logo, 2
( ) 0
f x > para todo x∈[ , ]c d e, como f2 também é contí-nua, pelo Teorema do Valor Intermediário, existem m M, >0 tais
que 2
( )
m≤ f x ≤M para todo x∈[ , ]c d . Assim,
2 2 2
( ( )) ( ( )) ( ( ))
b c d
a f x dx= a f x dx+ c f x dx+ ≥ ≥ − >
∫
∫
∫
∫
∫
2 2
) b( ( )) d( ( )) ( ) 0
d c
dx f x dx f x dx m d c
= + + ≥ ≥ − >
∫
∫
∫
∫
∫
.Ou seja, f f, ≠0. Esse produto interno é chamado de produto interno usual em C a b[ , ].
Exercício 1: Verifique se as seguintes funções definidas em ℜ2 são produto interno ou não.
1 1 2 1 1 2 2 2 ,
u v =u v +u v +u v +u v
a) ;
1 1 2 1 1 2 2 2
, 4
u v =u v −u v −u v + u v
b) ;
1 1 2 1 2 2
, 4
u v =u v +u v + u v
1 2 2 1 ,
u v =u v −u v
d) ;
1 1 2 1 1 2 2 2 1
, m
u v u v u v u v u v m
+
= + + +
e) , em que m é um inteiro positivo;
1 1 2 1 1 2 2 2 1
, m
u v u v u v u v u v m
+
= − − +
f) , em que m é um inteiro positivo;
1 1 2 2
, 2 4
u v = u v + u v
g) ;
1 1 , 2 u v = u v
h) .
1.2 Norma definida a partir de um
produto interno
No produto interno definido no espaço euclidiano, vimos que a norma de um vetor u satisfaz à equação u = u u, . Na genera-lização do conceito de produto interno, definiremos norma, dado um produto interno, utilizando essa equação.
Definição: Seja V um espaço vetorial real. Seja , :V V× → ℜ um produto interno. A norma induzida por esse produto interno é definida pela equação seguinte:
, u = u u
Exemplo 5: Seja 2
V = ℜ . Considere o produto inter-no entre dois vetores u=( ,u u1 2) e v=( ,v v1 2) definido por
1 1 2 1 1 2 2 2
, 4
u v =u v +u v +u v + u v . A norma induzida por esse
produ-to interno é 2 2
1 2 1 2 4 2 u = u + u u + u .
Exemplo 6: Seja V =C a b[ , ] o espaço das funções reais contínu-as em [ , ]a b , a<b. Considere o produto interno usual de duas funções de V , f e g (que é dado por , b ( ) ( )
a
f g =
∫
f x g x dx). A norma induzida por esse produto interno é2 ( ( )) b
a
1.3 Ângulo entre vetores
Para definir ângulo entre vetores de um espaço vetorial real V , va-mos demonstrar primeiro a Desigualdade de Cauchy-Schwarz.
Proposição (Desigualdade de Cauchy-Schwarz): Seja V um es-paço vetorial real munido de um produto interno , :V V× → ℜ. Assim, para todos os vetores u e v de V , temos
,
u v ≤ u v
Prova: A desigualdade é verdadeira se um dos vetores é o vetor
nulo. Vamos supor, então, que u≠0 e v≠0. Seja w v u v,2 u u
= − ,
logo:
2 2
, ,
, , , u v , u v ,
w w w v w u v v u v
u u
= − = − − + =
2 2 2
, , ,
, v, u v u u v u, u v u
u u u
= − = − − + =
2 2 2
2 2
2 2 2
, , ,
2 u v u v u v
v v
u u u
= − + = − . Como 2
, 0
w w = w ≥ ,
temos que:
2 2
2 ,
0 u v v
u
− ≥
Ou seja, u v, ≤ u v .
Vamos definir, agora, ângulo entre dois vetores.
Definição: Seja V um espaço vetorial real munido de um pro-duto interno , :V V× → ℜ. Assim, dados vetores u e v de V , ambos não-nulos, o ângulo entre esses vetores é o que satisfaz as seguintes condições:
, cos u v
u v
= , 0≤ ≤ .
Note que, por Cauchy-Schwarz, essa definição faz sentido, uma vez que
, 1 u v 1
u v
− ≤ ≤ .
1.4 Ortogonalidade
A definição de ângulo entre vetores permite-nos falar em con-juntos de vetores ortogonais, em que o ângulo entre cada dois vetores é igual a 2.
Definição: Seja V um espaço vetorial real munido de um produ-to interno , :V V× → ℜ. Sejam v1,...,vn vetores de V . Dizemos que v1,...,vn são ortogonais se, para todos i e j tais que i≠ j,
, 0
i j
v v = .
É importante notar que a ortogonalidade depende do produto in-terno: dois vetores não-nulos podem ser ortogonais em relação a um produto interno, mas o ângulo entre eles pode ser diferente de 2 em relação a outro produto interno. Uma observação in-teressante é que o vetor nulo é o único vetor ortogonal a todos os vetores de um espaço vetorial com produto interno. Um resultado interessante é o seguinte:
Proposição: Sejamv1,...,vn vetores não-nulos de V , um espaço
vetorial real munido de um produto interno , :V V× → ℜ. Se
1,..., n
v v são ortogonais (em relação a esse produto interno) então são linearmente independentes.
Prova: Suponha que existam a1,...,an∈ℜ tais
que a v1 1+ + a vn n =0. Logo, para todo índice i,
1 1 n n, i 0, i 0
a v + + a v v = v = . No entanto,
2 1 1 n n, i 1 1, i ... n n, i i i, i i i
a v + + a v v =a v v + +a v v =a v v =a v
pois os vetores são ortogonais dois a dois. Assim, como os veto-res são não-nulos, para todo índice i, ai =0, isto é, escreve-se o vetor zero de uma única maneira como combinação linear dos ve-tores v1,...,vn, que é a combinação trivial. Dessa maneira, v1,...,vn
são linearmente independentes.
Corolário (Teorema de Pitágoras Generalizado): Sejam u e v dois vetores ortogonais em um espaço vetorial real V munido de um produto interno. Assim: 2 2 2
u+v = u + v .
Prova: É deixada para você, leitor, como exercício.
Em geral, falamos em conjunto ortogonal de vetores para dizer que os vetores do conjunto são ortogonais. Por exemplo: dizemos que uma base de um espaço vetorial é ortogonal, significando que os vetores da base são ortogonais. Uma pergunta que emerge na-turalmente é se sempre existem bases ortogonais para qualquer espaço vetorial real. Vamos responder a essa pergunta feita no caso do espaço ser finitamente gerado de uma forma concreta: vamos construir uma base ortogonal a partir de uma base qual-quer. Um método prático para isso é o método de Gram-Schmidt, descrito a seguir.
1.4.1 Método de Gram-Schmidt
Sejam v1,...,vn de V , um espaço vetorial real munido de um
produto interno , :V V× → ℜ. Vamos definir, a partir des-ses vetores, um conjunto ortogonal de vetores w1,...,wn tais que
1 1
[ ,...,v vn] [= w,...,wn].
1 1 w =v i)
2 1
2 2 2 1
1 , v w
w v w
w = − ii)
3 1 3 2
3 3 2 1 2 2
1 2
, ,
v w v w
w v w w
w w
= − −
iii)
...
n) 1 2 1
1 2 1
2 2 2
1 2 1
, , ,
n n n n
n n n
n
v w v w v w
w v w w w
w w w
− − −
= − − − −
I) 2 1 2 1
2 1 2 2 1 1 2 1 2 1 1
1 1
, ,
, v w , , v w , 0
w w v w w v w w w
w w
= − = − =
II) Seja k>2. Suponha que para todos os índices i e j, i≠ j, tais que 1≤i j, <k, temos w wi, j =0. Assim, para todo i, percebe-se que:
1 2 1
1 2 1
2 2 2
1 2 1
, , ,
, k k k k ,
k i k k i
k
v w v w v w
w w v w w w w
w w w
− − −
= − − − − =
1 2 1
1 2 1
2 2 2
1 2 1
, , ,
, k , k , k k ,
k i i i k i
k
v w v w v w
v w w w w w w w
w w w
− − − = − − − − = 2 ,
, k i , 0
k i i i
i
v w
v w w w
w
= − =
Observe que, por construção, [ ,..., ] [v1 vi = w1,...,wi] para todo i
(mostre isso, por indução). Assim, no enésimo passo, chegamos a uma base ortogonal.
Corolário: Todo espaço vetorial de dimensão finita com produto interno admite uma base ortogonal.
Exemplo 7: Considere 3
V = ℜ , munido do produto interno usual,
1 (1,1, 0)
v = , v2 =(1, 0,1),v3=(0,1,1). Aplicando o método de Gram-Schmidt a esses vetores, temos:
1 (1,1, 0); w =
1 1 2 2
2 2 2 2
1.1 0.1 1.0
(1, 0,1) (1,1, 0) ( , ,1) 1 1 0
w = − + + = −
+ + ;
3 2 2 2
0.1 1.1 1.0 0. (0,1,1) (1,1, 0)
1 1 0 (
w = − + + − + − + − = −
+ + + − +
1 1
2 2 1 1 2 2 2
2 2 3 3 3
2 2 2
1 1
2 2
0. 1.( ) 1.1
,1, 0) ( , ,1) ( , , )
( ) ( ) 1
+ + + − +
= − − − = −
+ + + − + .
Você pode verificar, calculando os produtos internos , que o con-junto { ,w w w1 2, 3} é ortogonal.
2 V = ℜ
a) , munido do produto interno usual, v1=(1,1), 2 (1, 2)
v = ;
3 V = ℜ
b) , munido do produto interno usual, v1=(1,1,1), 2 (1, 2,1)
v = ,v3=(1, 2, 2);
4 V = ℜ
c) , munido do produto interno usual, v1=(1,1,1,1), 2 (1, 0, 0,1)
v = , v3 =(1, 2, 0, 2), v4 =(3, 2, 0, 2);
[ 1,1] V =C −
d) , munido do produto interno usual, f x1( ) 1= ,
2( )
f x =x, f x3( )=x2.
A seguir, apresentamos algumas definições.
Definição: Seja V um espaço vetorial real munido de um pro-duto interno , :V V× → ℜ. Seja Wum subespaço vetorial de V . Seja v um vetor de V tal que v W∉ . Dizemos que v é ortogonal a Wse v é ortogonal a todo vetor de W.
Exercício 3: Sejam v1,...,vn vetores de V , um espaço vetorial real
munido de um produto interno , :V V× → ℜ. Seja W =[ ,...,v1 vn]. Seja v um vetor de V tal que v W∉ . Mostre que v é ortogonal a Wse, e somente se, para todo i, v é ortogonal a vi.
Definição: Seja V um espaço vetorial real munido de um produ-to interno , :V V× → ℜ. Sejam W1 e W2 subespaços vetoriais de V . Dizemos que W1 é ortogonal a W2 se, para todo vetor w1 de
1
W e todo vetor w2 de W2, w w1, 2 =0. Se, além disso, W1+W2 =V, então dizemos que W2 é o complemento ortogonal de W1 e denotamo-lo por W1
⊥. Observe que, como
1
W é ortogonal a W2,
1 2 {0}
W ∩W = e, logo, W1⊕W2 =V .
Definição: Dizemos que um conjunto de vetores é ortonormal
se os vetores do conjunto são ortogonais (dois a dois) e unitários (isto é, de norma igual a 1).
1.5 Projeção ortogonal de um vetor
sobre um subespaço vetorial
Definição: Seja V um espaço vetorial real não-nulo munido de um produto interno. Seja W um subespaço vetorial de V, W ≠V. Seja v V∈ . Um vetorw W∈ é dito uma projeção ortogonal de v sobre Wse (v−w) for ortogonal a todo vetor de W.
Proposição: Se existe uma projeção ortogonal de v sobre W, então ela é única.
Prova: Sejam w e w dois vetores de W tais que (v−w) e (v−w) são ortogonais a todo vetor de W. Em particular, como (w w− )∈W , 0= −v w w w, − = −v w w w, − . Desenvolven-do os cálculos, concluímos que w w w, − = w w w, − e, logo,
, 0
w w w w− − = . Ou seja, w=w.
Vamos mostrar que, se W é um subespaço de dimensão finita de um espaço vetorial real V com produto interno, então a projeção ortogonal de qualquer vetor de V sobre W existe e, logo, é única.
Seja { ,..., }v1 vn uma base de um subespaço W de um espaço
veto-rial real V , com produto interno , . Seja v V∈ . A projeção orto-gonal de v sobre [ ,...,v1 vn] é um vetor v∈[ ,...,v1 vn] tal que v v− é ortogonal a [ ,...,v1 vn]. Vamos mostrar que esse vetor v existe.
Para isso, seja { ,...,w1 wn} uma base ortonormal de [ ,...,v1 vn],
ob-tida a partir do método de Gram-Schmidt. Procuramos por um vetor v =a w1 1+ + a wn n tal que v v− seja ortogonal a [w1,...,wn],
que é igual a [ ,...,v1 vn], isto é, tal que v v− seja ortogonal a todo
vetor da base { ,...,w1 wn}. Assim, para todo i, temos:
1 1
0= −v v w, i = −v a w +a w wn n, i = v w, i −a w wi i, i = v w, i −ai
ou seja, ai = v w, i . Assim, a projeção ortogonal de v sobre
1
[ ,...,v vn] existe e é o vetor
1 1
, , n n
v = v w w + + v w w .
,
o
v
v
Operar com uma base ortonormal é muito conveniente. Para justificar esse adjetivo, vamos ver como ficaria o cálculo com a base { ,..., }v1 vn , que é qualquer. Uma vez que sabemos que o
ve-tor v existe e é único, como v∈[ ,...,v1 vn], existe um único vetor
1
( ,b ,bn)∈ℜn tal que v =b v1 1+b vn n. Como v v− é ortogonal a
1
[ ,...,v vn], v v v− , i =0, i=1:n. Assim, obtemos:
1 1 1 1 1
1 1
, , , 0
, , , 0
n n
n n n n n
v v b v v b v v
v v b v v b v v
− + + =
− + + =
, ou seja, na forma matricial,
1 1 1 1 1
1
, , ,
, , ,
n
n n n n n
v v v v b v v
v v v v b v v
=
.
Como esse sistema tem única solução (pois a projeção ortogo-nal existe e é única), essa matriz é inversível para qualquer base
1 { ,..., }v vn
= (lembre-se que um sistema de n equações lineares a n variáveis é possível e determinado se, e somente se, a matriz de coeficientes é inversível). Essa matriz é dita matriz de Gram
(note que a matriz de Gram definida em espaços vetoriais reais é uma matriz real e simétrica). Para achar v utilizando-se de uma base não-ortonormal, temos que resolver o sistema apresentado, o que é muito trabalhoso se a matriz não for diagonal (note que a matriz do sistema em questão é diagonal se a base é ortogonal). En passant, demonstramos a seguinte proposição:
Proposição: Uma matriz de Gram é uma matriz inversível.
Outro modo de se provar essa proposição é verificar que o siste-ma homogêneo associado à siste-matriz G apresentada anteriormente só admite a solução zero. Realmente, 0 T 0
Gx= ⇒x Gx= . Note que 2
T
x Gx= w , em que w=b v1 1+ + b vn n e x=( )w . Logo, w=0, ou seja, b v1 1+ + b vn n =0. No entanto, { ,..., }v1 vn é uma base. Assim,
a única solução possível é b1==bn =0, isto é, a única solução
possível da equação matricial Gx=0 é a solução trivial x=0. Por conseguinte, G é inversível.
Observe que, se estamos trabalhando em ℜm com o produto
in-terno usual, o referido sistema não-homogêneo pode ser reescri-to como T T
A Ax= A v, em que A é a matriz cujas colunas são as coordenadas canônicas dos vetores da base { ,..., }v1 vn e x é a
co-luna formada por b1,,bn. A solução desse sistema é dada por
1 ( T ) T
x= A A − A v. Logo, a projeção ortogonal de um vetor v sobre um subespaço [ ,...,v1 vn] é dada por:
1 ( T ) T v = A A A − A v. Observe que, se v∈[ ,v1 ,vn], v =v.
Exercício 5: Em cada item a seguir são dados v1,...,vn e v, vetores
de V , um espaço vetorial real munido de um produto interno , :V V× → ℜ. Seja W =[ ,...,v1 vn]. Ache a projeção ortogonal de v sobre W.
i) 2
V = ℜ , munido do produto interno usual, v1 =(1,1); v=(1, 2);
ii) 3
V = ℜ , munido do produto interno usual, v1=(1,1,1); (1, 2, 2)
v= ;
iii) 3
V = ℜ , munido do produto interno usual, v1=(1,1,1),
2 (1, 2,1)
v = ; v=(1, 2, 2);
iv) 4
V = ℜ , munido do produto interno usual; v1=(1,1,1,1),
2 (1, 0, 0,1)
v = ; v=(3, 2, 0, 2);
v) 4
V = ℜ , munido do produto interno usual; v1=(1,1,1,1),
2 (1, 0, 0,1)
v = , v3 =(1, 2, 0, 2); v=(3, 2, 0, 2);
vi) V =C[ 1,1]− , munido do produto interno usual, v x1( ) 1= ,
2( )
v x =x; v x( )=x2;
vii) V =C[ 1,1]− , munido do produto interno usual, v x1( ) 1= , 2( )
v x =x, 2 3( )
v x =x ; 3 ( ) v x =x .
1.6 Matrizes ortogonais
Seja mV = ℜ . Vimos que a projeção ortogonal de um vetor v sobre o subespaço gerado por uma base { ,..., }v1 vn é dada pela fórmula
1 ( T ) T
v =A A A − A v. Se os vetores da base forem ortonormais, essa fórmula se reduz a T
v =A A v, pois T
(verifique). Matrizes, cujas colunas são vetores ortonormais, par-tilham dessa propriedade. Note que, se A for uma matriz qua-drada, T
A é a inversa de A. Essas matrizes são ditas ortogonais (cuidado para não fazer confusão: matrizes ortogonais têm colu-nas ortonormais).
Definição: Uma matriz n n
A∈ℜ× é ortogonal se A AT. =I .
Proposição: As seguintes sentenças são equivalentes:
n n
A∈ℜ ×
a) é ortogonal;
As colunas de
b) n n
A∈ℜ× são ortonormais; As linhas de
c) n n
A∈ℜ × são ortonormais;
n n
A∈ℜ ×
d) e (∀ ∈ℜx n) Ax = x ;
n n
A∈ℜ ×
e) e (∀x y, ∈ℜn)y A AxT T = y xT .
A prova dessa proposição pode ser vista, por exemplo, em Hoffman e Kunze (1970). Note que a sentença (d) caracteriza uma matriz ortogonal como sendo uma matriz que preserva a norma de um vetor quando multiplicada por ele; a sentença (e) descreve uma matriz ortogonal como uma matriz que preserva o produ-to interno de dois veprodu-tores (e, de quebra, preserva o ângulo entre cada dois vetores).
Exercício 6:Mostre que o produto de matrizes ortogonais é uma matriz ortogonal.
Exercício 7: Mostre que a inversa de uma matriz ortogonal é, tam-bém, ortogonal.
Exercício 8: Mostre que, se n n
Q∈ℜ × é uma matriz ortogonal, a
matriz 11 1
1
1 0 0
0
0
n
n nn
q q
q q
, pertencente a ℜ(n+ × +1) (n 1), é uma matriz
1.7 Reflexões de Householder
As matrizes de reflexão em relação a um subespaço de ℜn são
exemplos de matrizes ortogonais. As reflexões de Householder são as reflexões em relação a um subespaço de co-dimensão 1 (ou seja, de dimensão n−1). Elas surgiram na construção de um novo processo de ortonormalização de vetores, diferente do método de Gram-Schmidt: o método de Householder. Nesse processo, bus-ca-se uma reflexão H que leva um vetor v dado a um vetor na direção do vetor canônico e1=(1, 0,, 0). É claro que, como uma reflexão preserva a norma dos vetores (ver o item d da proposi-ção anterior), há duas possibilidades para Hv: ou Hv= v e1 ou
1
Hv= − v e . H é dito uma reflexão de Householder se o subes-paço em relação ao qual a reflexão age é o hiperplano bissetor de um dos dois ângulos que v faz com a reta gerada por e1, isto é: ou é o hiperplano 1 cuja normal é o vetor n1= −v v e1, ou é o hiperplano 2 cuja normal é n2 = +v v e1.
o
v
π1 n1
n2
||v||2 .e1 −||v||2 .e1
π2
v1 v2
Figura 1.2 - Reflexões de Householder
Vamos achar uma fórmula para essas reflexões. Seja n uma das normais descritas anteriormente, associada ao hiperplano . Note que ⊥ =[ ]n . Logo, n [ ]
n
ℜ = ⊕ . Assim, dado um vetor u qualquer, u pode ser escrito de uma única forma como soma de um vetor de com um vetor de [ ]n : u=u+u[ ]n . Dessa maneira,
[ ]n 2 [ ]n
Hu=u−u = −u u , entretanto u[ ]n é a projeção ortogonal de u sobre [ ]n . Ou seja,
1
[ ] .( . ) 2
T
T T
n
nn
u n n n n u u
n
−
Logo, 2 . 2 ( 2 . 2 )
T T
n n n n
Hu u u I u
n n
= − = − , e assim concluímos que:
2 . 2 T n n H I n = − .
Note que, por essa fórmula, obtemos as duas reflexões de Householder que transformam o vetor dado em um vetor na direção do vetor canônico e1. Por exemplo: suponha que
3
V = ℜ , com o produto interno usual. Seja v=(1, 2, 2), então
1 1 (1.2.2) 3(1, 0, 0) ( 2, 2, 2)
n = −v v e = − = − corresponde à reflexão:
1 2 2
3 3 3
1 1 1 1 1 1 2 1 2
3 3 3
1 2
1 2 2 1
3 3 3
. . .
2 2
12 6
T T T
n n n n n n
H I I I
n = − = − = − = − − ;
enquanto n2 = +v v e1 =(1, 2, 2) 3 (1, 0, 0)+ =(4, 2, 2) está associado à reflexão:
1 2 2
3 3 3
2 2 2 2 2 2 2 2 1
3 3 3
2 2
2 2 1 2
3 3 3
. . .
2 2
24 12
T T T
n n n n n n
H I I I
n − − − = − = − = − = − − − − .
Note que essas matrizes são ortogonais (verifique) e simétricas, características das reflexões de Householder. Assim, se H é uma reflexão de Householder,
1
T
H =H =H− .
Como já dissemos antes, uma aplicação das reflexões de Hou-seholder é ortonormalizar bases. Por exemplo, vamos achar uma base ortonormal para o subespaço [ (1,1,1,1) , (0, 0,1,1) , (0, 0, 0,1) ] do ℜ4. Para isso, primeiro construímos a matriz
A, cujas
co-lunas são os vetores da base dada:
1 0 0 1 0 0 1 1 0 1 1 1 A =
. Agora,
va-mos achar uma reflexão de Householder que reflita o primeiro vetor da base dada na direção do primeiro vetor canônico do
4
ℜ . Vamos escolher, entre as duas normais possíveis, a normal (1,1,1,1) (1,1,1,1) (1, 0, 0, 0) (3,1,1,1)
n= + = . A reflexão de
1 1 1 1
2 2 2 2
5
1 1 1
2 6 6 6
2 1 1 5 1
2 6 6 6
5
1 1 1
2 6 6 6
2 2
12 6
T T T
n n n n n n
H I I I
n − − − − − − − = − = − = − = − − − − − − . Logo, 1 2 1 1 3 6 2 1 3 6 5 2 3 6 2 1 0 0 0 HA − − − − − = −
. Agora, vamos achar uma
re-flexão de Householder que reflita o vetor 1 2 2 3 3 3
(− , , ) na di-reção do primeiro vetor canônico do ℜ3. Vamos escolher
1 2 2 1 2 2 2 2 2
3 3 3 3 3 3 3 3 3
1 ( , , ) ( , , ) (1, 0, 0) ( , , )
n = − + − = . A reflexão de
Householder correspondente a essa normal é dada por:
1 2 2
3 3 3
1 1 1 1 1 1 2 1 2
3 3 3
1 2 4
3
1 2 2 1
3 3 3
2 2 3
2
T T T
n n n n n n
H I I I
n − − = − = − = − = − − − − .
Considere a matriz 13 23 23
1 2 1 2
3 3 3
2 2 1
3 3 3
1 0 0 0
0 0 0 H − − = − − − − , então 1 2
1 2 2 1 1
3 3 3 3 6
1 2 1 2 2 1
3 3 3 3 6
5
2 2 1 2
3 3 3 3 6
1 0 0 0 2 1
0 0 0 0 0 0 H HA − − − − − − − = − − − − −
, ou seja,
1 2 1 2 1 1 2 1 2 2 1 0 1 0 0 0 0 H HA − − − − − = −
. Finalmente, vamos achar uma
re-flexão de Householder que reflita o vetor 1 1 2 2
(− , ) na di-reção do primeiro vetor canônico do ℜ2. Vamos tomar
2
1 1 1 1 1 1
2 2 2 2 2 2 2
2 ( , ) ( , ) (1, 0) ( , )
n = − + − = − . A reflexão de
Hou-seholder correspondente a essa normal é dada por:
2 2
2 2
2 2 2 2
2 2 2 2
2 2
2
2 4
2 2
T T
n n n n
H I I
Considere a matriz 2
2 2
2 2
2 2
2 2
1 0 0 0
0 1 0 0
0 0 0 0 H = − − − . Assim, 1 1 2 2 1 1 2 2
2 1 2 2 1
2 2 2
2 2 1
2 2 2
2 1
1 0 0 0 2 1
0 1
0 1 0 0 0 1
0 0 0 0 0 0 2
0 0 0 0 0 0 0
H H HA
− − − − − − − − − − = = − − − − − Logo,
12 1 1 2 12
2 2 2
12 1 1 2 12
2 2 2
1 2 2
1 1
2 2 2
2
1 1
2 2 2
2 1 0 2 1
0 1 0 0 1
0
0 0 2 0 0 2
0
0 0 0 0 0 0
A HH H
− − − − − − − − − − − − − = = = − − − − − − − 1 1 2 2 1 2 1 1 2 2 1 2 2 1 1
2 2 2
2
1 1
2 2 2
0
2 1 0
0 1
0 0 2
QR − − − − − = − − = − − − − − − ,
e, assim, as colunas de Q, que são ortonormais e geram o mesmo espaço que as colunas de A, formam uma base ortonormal para [ (1,1,1,1), (0, 0,1,1), (0, 0, 0,1) ].
Exercício 9: Ache as duas reflexões de Householder que satisfa-zem o que é pedido em cada item a seguir:
Que transformem o vetor
i) (2,1, 2) em um vetor na direção do vetor (1, 0, 0);
Que transformem o vetor
ii) (2,1, 2) em um vetor na direção do vetor (1,1,1);
iii) Que transformem o vetor (2,1, 2) em um vetor na direção do vetor (1, 2, 2);
iv) Que transformem o vetor (2,1, 2) em um vetor na direção do vetor (0, 0,1).
1.8 Matriz de um produto interno
em relação a uma base
Seja V um espaço vetorial real de dimensão finita n, munido de um produto interno , :V V× → ℜ. Seja ={ ,..., }v1 vn uma base de V . Considere v e w, dois vetores de V : v=a v1 1+ + a vn n,
1 1 n n
w=b v + + b v . Assim,
, 1
, ,
n
T i j i j i j
v w a b v v b G a
=
=
∑
= , emque G é a matriz de Gram, definida por Gij = v vi, j = v vj, i ,
1
( ) ( ) T
n
b = bb = w e aT =(a1an)=( )v .
Definição: A matriz G é a matriz do produto interno em relação à base .
Exercício 10: Achar a matriz de cada produto interno listado a seguir, em relação à base dada:
2 V = ℜ
i) , munido do produto interno usual, ={ , }v v1 2 , em que v1 =(1,1), v2 =(1, 2);
2 V = ℜ
ii) , munido do produto interno
1 1 2 1 1 2 2 2
, 4
u v =x y +x y +x y + x y , em que u=( ,x x1 2),
1 2 ( , )
v= y y ,={ , }v v1 2 , onde v1=(1,1), v2 =(1, 2);
iii) 3
V = ℜ , munido do produto interno usual, ={ ,v v v1 2, }3 , em que v1 =(1,1,1), v2 =(1, 2,1), v3 =(1, 2, 2);
iv) 4
v) V é o espaço das funções polinomiais de grau menor ou igual a três, munido do produto interno usual, ={ ,v v v v1 2, , }3 4 , em que v x1( ) 1= , v x2( )=x,
2 3( )
v x =x , v x4( )=x3.
Fechamos este capítulo fazendo-nos a seguinte pergunta: se, dada uma base, um produto interno fica determinado a partir de uma matriz, que propriedades essa matriz deve satisfazer? Uma resposta parcial é: a matriz deve ser simétrica e inversível. No
en-tanto só isso não basta, porque a matriz 12 1
2 1 1 A=
é simétrica, é inversível e não é matriz de nenhum produto interno, não importa que base nós tomamos. Por exemplo: digamos que 2
V = ℜ e que
tomamos uma base ={ , }v v1 2 . Seja v= −v1 v2. Assim,
1 ( )
1 v =
−
e, logo, 12
1 2
1 1
, (1 1) 1
1 1
v v = − = − −
. Pela definição de
pro-duto interno, porém, v v, ≥0. Dessa maneira, a resposta com-pleta é: uma matrizA é matriz de um produto interno em relação a uma base se, e somente se, a matriz A é simétrica e satisfaz a desigualdade T 0
x Ax> para todo vetor coluna x, x≠0.
SeA é uma matriz simétrica tal que, para todo vetor coluna x, x≠0,
0 T
x Ax> , entãoA é dita uma matriz simétrica definida positiva.
Note que, pela definição, uma matriz A simétrica definida positi-va tem as seguintes propriedades:
As entradas diagonais de
• A são estritamente positivas pois,
se o vetor coluna ek =(0 0 1 0 0)Té tal que a k-ésima entrada é 1, akk =e AekT k >0;
As submatrizes principais
• A(1: ,1: )k k , formadas pelas en-tradas pertencentes simultaneamente às k primeiras linhas e colunas de A, são também matrizes simétricas definidas positivas (demonstre);
A
• é inversível (demonstre).
Exercício 11: Verifique se as matrizes abaixo são simétricas defi-nidas positivas.
a) 1 1 1 1 A=
; b)
5 1 1 1 A= −
− −
; c)
2 1 1 1 A=
d) 2 1
1 1 A= −
−
; e)
2 2 2 1 A=
; f)
4 2 2 1 A=
;
g) 4 1
1 0 A=
; h)
1 0 0 1 A=
.
Resumo
Neste capítulo vimos a definição de produto interno em um espaço vetorial real V. Concluímos que, dados um produto interno , em V e uma base, existe uma única matriz simétrica real A tal que, quaisquer que sejam os vetores v e w de V, , ( ) T ( )
v w = w A v . Essa matriz é inversível e é dita uma matriz de Gram. Definimos, ainda, o ângulo entre dois vetores e vimos que dois vetores são ortogonais em relação a um produto interno se o produto interno entre eles é zero.
Em seguida, apresentamos um procedimento que ortogonaliza uma base de um espaço vetorial real de dimensão finita, ou seja, que resulta em um conjunto l. i. de geradores do espaço que se-jam ortogonais dois a dois. Definimos, depois, um conjunto de matrizes ditas ortogonais, que são matrizes associadas a opera-dores lineares, definidos em espaços vetoriais reais com produto interno, que preservam ângulos entre vetores (ex.: as reflexões de Householder).
Bibliografia Comentada
HOFFMAN, Kenneth; KUNZE, Ray. Álgebra Linear. São Paulo: Polígono, 1970.
Lício H. Bezerra: esse livro é um dos meus livros prediletos de Álgebra Linear. Infelizmente, ele está esgotado. Foi lançada uma segunda edição desse livro no Brasil, com muitas alterações, mas prefiro a primeira edição. Procure-no em sebos e compre-o. O tratamento é rigoroso e as provas são elaboradas. Contém muitos exercícios, alguns não muito fáceis de resolver.
LIMA, Elon L. Álgebra Linear. 3ª ed. Rio de Janeiro: SBM, 1998.
Há edições mais recentes desse livro, que apresenta a Álgebra Linear de forma clássica, como o livro de Hoffman e Kunze (1970). Recomendo esse livro para uma biblioteca de Matemática. Tem muitos exercícios.
ANTON, Howard; RORRES, Chris. Álgebra Linear com Aplicações. 8ª ed. Porto Alegre: Bookman, 2001.
2
Autovalores e Autovetores
2
Autovalores e Autovetores de
um Operador Linear
Lembramos que um operador linear é uma transformação linear T V: →V , em que V é um espaço vetorial sobre um corpo K. Se V é de dimensão n e é uma base de V , então existe uma matriz [ ]T associada a T com a propriedade de que todas as informações sobre T podem ser obtidas a partir de cálculos sobre [ ]T . Neste capítulo introduziremos o conceito de autovalores e autovetores de operadores lineares, mostrando que a extração de infor-mações de T pode ser simplificada significativamente des-de que T admita uma base de autovetores, em cujo caso a matriz associada [ ]T é diagonal. No decorrer do capítulo assumiremos que V é um espaço vetorial real, a menos quando explicitamente dito em contrário.
2.1 Autovalores e autovetores
Em muitas situações práticas de ciências puras e aplicadas, dado um operador linear T V: →V, deparamo-nos com o problema de encontrar vetores não-nulos v tais que o vetor transformado T v( ) seja múltiplo de v. Esse é o problema de autovalores, um tópico
mui-to importante da Álgebra Linear. O termo aumui-tovalor provém do adjetivo germânico eigen, que significa “próprio” ou “característico de”. Do ponto de vista teórico, autovalores e autovetores
concen-tram informações sobre a natureza do operador e tornam-se im-portantes porque nos mostram como o operador funciona.
Definição: Um número real é um autovalor ou valor próprio do
operador linear T V: →V se existe um vetor não-nulo v V∈ tal que T v( )=v. O vetor v é chamado de autovetor ou vetor próprio
de T associado a . O conjunto V formado por todos os autove-tores de T associados a um autovalor e pelo vetor nulo é um subespaço vetorial de V chamado subespaço próprio ou autoespaço
A partir daí, algumas perguntas que surgem de maneira natu-ral são: quantos autovetores podemos associar a um autovalor? Quantos autovalores podemos encontrar? O que podemos fazer para encontrar autovalores e autovetores? Com o intuito de res-ponder a essas e outras perguntas que aparecerão no decorrer do capítulo, começamos com a observação de que se v é um auto-vetor de T associado a , então o mesmo acontece com v para qualquer escalar arbitrário não-nulo , já que
( ) ( ) ( ).
T v =v⇔T v = v
Ou seja, qualquer múltiplo escalar de v também V é um autove-tor de T associado a .
Para ilustrarmos como achar autovalores e autovetores correspon-dentes apresentamos alguns exemplos a seguir.
Exemplo 1: Seja 2 2 :
T ℜ → ℜ , T x y( , )=(2 ,x x+3 )y . Para pro-curar autovalores e autovetores de T resolvemos a equação
( , ) ( , )
T x y = x y ou (pela definição de T) (2 ,x x+3 )y = ( , )x y . Igualando componentes obtemos o sistema de equações:
2 3 x x
x y y
=
+ =
Note que y não podeser zero, caso contrário obteríamos x=0 e daí (x,y) = (0,0) (ou seja, o vetor nulo v=(0, 0)), o que não pode acontecer pela definição de autovetor. Agora podemos considerar dois casos: x≠0 e x=0. Se x≠0, da primeira equação obtemos
2
= , e, com esse valor na segunda equação, x= −y. Assim, =2 é um autovalor de T e v=( ,x − =x) x(1, 1)− , x≠0, é um autove-tor correspondente. Nesse caso, o subespaço próprio associado a
2
= é V=2={ (1, 1) /x − x∈ℜ =} [(1, 1)]− ou, em palavras, V=2 é o subespaço de ℜ2 gerado pelo autovetor
(1, 1)
v= − que é a reta no plano que contém v.
Se x=0, da segunda equação segue que =3 e y pode ser arbitrário (não-nulo). Portanto, =3 é outro autovalor de T,
(0, ) (0,1)
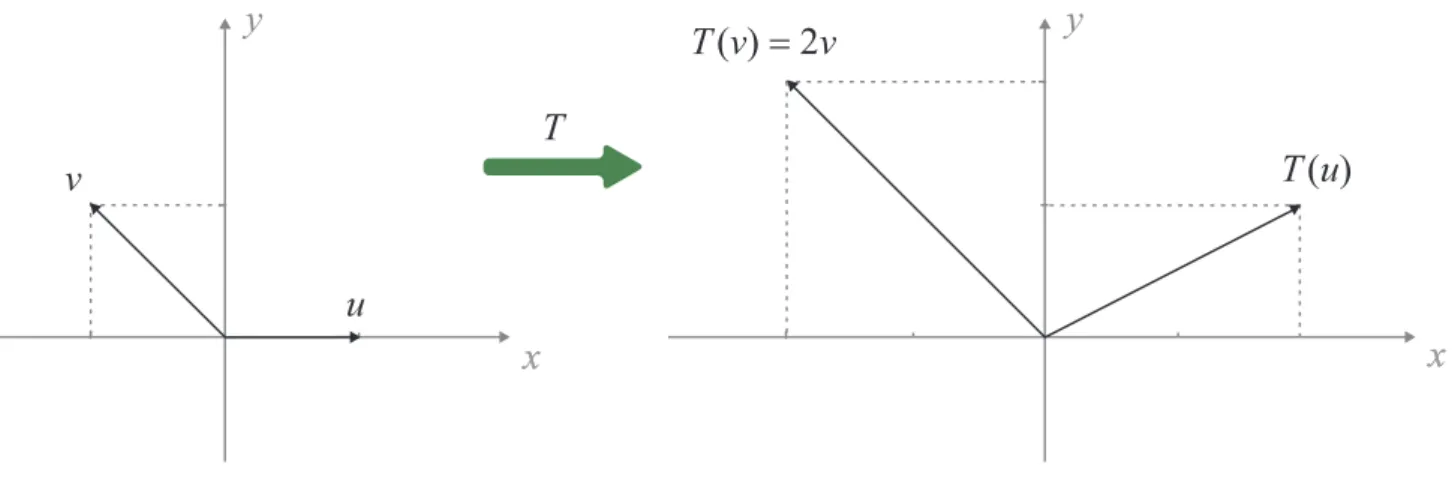
O efeito de um operador linear é determinado facilmente e sim-ples de se interpretar geometricamente em ℜ2. Como ilustração, considere o operador T do exemplo 1 e os vetores v= −( 1,1), e
(1, 0)
u= . Dessa forma, T v( )= −( 2, 2)= −2 ( 1,1), isto é, v é trans-formado em um múltiplo de si mesmo, pois v é um autovetor de T associado ao autovalor =2 (ver figura 3 a seguir). O efeito do operador sobre u é T u( )=(2,1). Obviamente, u não é autovetor do operador, pois T u( ) não é múltiplo de u.
y
x
x v
u
x
x
y
T (v)=2v
T (u)
T
Figura 2.1 - Efeito de um operador linear
Observação: Embora o efeito de um operador em ℜ2 seja simples de se calcular, a situação pode ser bem diferente quando a di-mensão do espaço é elevada. No entanto, se v é uma combinação de autovetores v1,,vp de T, por exemplo, v=1 1v + + pvp, e
se ambos j e vj são disponíveis, o efeito de T sobre v pode
ser calculado facilmente. De fato, como T é linear, segue que
1 1
( ) ( ) p ( p)
T v =T v + + T v e, assim, o efeito do operador pode ser calculado como T v( )= 1 1v1+ + p pvp, um fato muito
explorado em aplicações da álgebra linear na resolução de proble-mas práticos.
Exemplo 2: Seja 2 2 :
T ℜ → ℜ , T x y( , )= −( y x, ). Se é um au-tovalor de T e v=( , )a b é um autovetor correspondente, então
( )
T v =v ⇔ −( b a, )= ( , )a b . Daí segue que 2+ =1 0, o que é im-possível em ℜ. Ou seja, como não existe real tal que T v( )=v, concluímos que o operador T não tem nem autovalores nem auto-vetores. Outro operador 2 2
:
T ℜ → ℜ que não possui autovalores é aquele que produz rotações no plano, veja a lista de exercícios ao final deste capítulo.
A existência de autovalores de um operador linear não depende da dimensão do espaço. Veja o exemplo a seguir.
Exemplo 3: Seja V =C( )ℜ o espaço das funções contínuas em ℜ. Sabemos que V é um espaço vetorial real de dimensão infinita.
Seja T V: →V o operador linear definido por | 0 ( )t t ( ) T f =
∫
f x dx.Afirmamos que o operador T não possui nenhum autovalor. De fato, vamos supor que ∈ℜ é um autovalor de T. Então
exis-te f ≠0 tal que Tf =f . Isto é,
0 ( ) t ( ) f t f x dx
=
∫
. Agora, já quepelo primeiro teorema fundamental do cálculo temos f '= f , segue que ≠0, pois f ≠0. Por outro lado, note que a equação diferencial f ' 1 f
= tem solução ( ) ct
f t =e com c=1 /. Substi-tuindo essa solução na equação autovalor-autovetor segue que
0
t
ct cx ct
e e dx e
=
∫
= −, e assim =0, o que contradiz o fato deser ≠0. Logo, fica demonstrado que o operador T não tem au-tovalores.
Sabemos que toda matriz real A n n× define um operador linear
1 1
: nx nx A
T ℜ → ℜ dado por T vA( )=Av. Note que aqui v denota um vetor coluna em ℜnx1 e que a imagem do operador é calculada via produto matriz vetor. Assim, os autovalores e autovetores de A são, por definição, os autovalores e autovetores do operador TA.
Logo, é um autovalor de A se existe um vetor não-nulo v em 1
nx
ℜ tal que Av=v. Portanto, podemos concluir que:
Observe que, nessa equação, I denota a matriz identidade n n× .
No entanto, já que o sistema homogêneo (A−I x) =0 tem solu-ção não-trivial se e somente se A−I é uma matriz singular, ou equivalentemente, se e somente se det (A−I)=0, temos que:
Os autovalores da matriz são as raízes da equação
a)
det (A−I)=0
chamada equação característica, e p( ) =det (A−I) é um po-linômio em de grau n chamado polinômio característico de
A. Para ver que p( ) é um polinômio de grau n, basta ob-servar que avaliando o determinante
11 1
1 ( ) det ( ) det
n
n nn
a a
p A I
a a
−
= − =
−
obtemos p( ) =(a11−)(ann − +) termos de grau menor
que n. Isso mostra que o polinômio característico de A é de grau n.
É importante observar que, se A é uma matriz real n n× , então p( ) tem coeficientes reais e, portanto, todas as suas raízes complexas vêm em pares conjugados. Assim, se
a ib
= + é raiz de p( ) , seu complexo conjugado = −a ib (i= −1) também é raiz de p( ) . Formalmente, as raízes complexas de p( ) são autovalores complexos da matriz
A interpretada como operador 1 1 : n n , A
T × →× dado por ( )
A
T x =Ax, x∈n×1. Dessa forma, se 1, 2,,n são os au-tovalores de A (reais ou complexos), então o polinômio ca-racterístico p( ) pode ser escrito como
1 2
( ) ( ) ( ) ( n ) p = − − − .
Considerando agora que p( ) =det (A−I)e tomando =0 nessa equação, segue que
1 2 n p(0) det ( )A
= = .
Outra conclusão imediata, que provém de comparar o coefi-ciente de ( n 1
−
− ) da expressão, que resulta de avaliar o deter-minante det (A−I), com o coeficiente de ( n 1
−
1 1
n n
j jj
j j
a
= =
=
∑
∑
.A soma dos elementos da diagonal principal de uma ma-triz quadrada A é chamada de traço deA e é denotada por
( ) tr A .
Para cada autovalor
b) , os autovetores associados são solu-ções não-triviais do sistema homogêneo
(A−I x) =0.
Observação: Uma dificuldade de ordem prática no cálculo de au-tovalores para matrizes n n× , n>4, é que equações polinomiais de grau maior que 4 não são solúveis por radicais, ou seja, essas equações não podem ser solucionadas usando fórmulas análogas àquelas usadas para equações de segundo ou terceiro graus. Por isso, na prática, o cálculo de autovalores é feito computacional-mente através de métodos iterativos. Métodos iterativos que usam transformações ortogonais são implementados em muitos siste-mas interativos como MATLAB, SCILAB, OCTAVE, MAPLE etc.
Os exemplos a seguir ilustram o procedimento para encontrar au-tovalores e autovetores associados.
Exemplo 4: Considerando a matriz 3 2 1 0 A= −
, a equação carac-terística é:
3 2
det ( ) 0 (3 ) (0 ) 1( 2) 0.
1 0
A I
− −
− = = ⇔ − − − − =
−
Daí vemos que os autovalores da matriz A são raízes da equa-ção 2
3 2 0
− + = : 1 =2, e 2 =1. Para encontrar os autovetores associados a 1=2, devemos encontrar soluções não-triviais do sistema homogêneo (A−1I x) =0:
1 1
1 2
3 2 0
1 0 0
x
x
− −
=
−
.
Esse sistema reduz-se à expressão x1−2x2 =0, da qual vemos que todas as soluções não-triviais desse sistema, ou seus autovetores
associados a 1=2, são da forma
2 1 x=
escalar não-nulo. Procedendo analogamente, podemos verificar
que os autovetores associados com 2 =1 são da forma
1 0 x=
, sendo qualquer escalar não-nulo.
Exemplo5:Neste exemplo consideramos a matriz 3 1 0
1 2 1 0 1 3 A − = − − − .
Para esta matriz, a equação característica é:
3 2
3 1 0
det ( ) 1 2 1 0 8 19 12 0
0 1 3
A I − − − = − − − = ⇔ − + − + = − − .
As raízes da equação característica fornecem os autovalores 1 =1,
2 3
= , 3 =4. Para encontrar o autovetor associado a 1 =1, re-solvemos o sistema homogêneo (A−1I x) =0, que nesse caso tem a forma
1 1 2
1 1 2 3
2 1 3
(3 ) 0
(2 ) 0
(3 ) 0 x x
x x x
x x − − = − + − − = − + − =
Escalonando, obtemos o sistema equivalente
1 2 3
2 3
0
2 0
x x x
x x
− + =
− =
que possui grau de liberdade 1 (ou seja, há uma variável livre). Tomando x3 como variável livre, o autovetor associado a 1 =1
tem a forma
3 3 3 3 1 2 2 3 x
x x x
x = =
, para x3 não-nulo e arbitrário.
Pro-cedendo analogamente, para 2 =3 temos que o autovetor
asso-ciado é 1 0 1 x = −
, sendo não-nulo, enquanto que para 3 =4
o autovetor é
1 1 1 x = −