EM LEVANTAMENTOS ALTI MÉTRI COS, PARA FI M
DE SI STEMATI ZAÇÃO DE TERRAS.
ANTONI O CARLOS SI LVEI RA COELHO
Disser t ação apr esent ada à Escola
Super ior de Agr icult ur a “Luiz de Queir oz”,
Univer sidade de São Paulo, par a obt enção do
t ít ulo de Mest r e em Agr onomia, Ár ea de
concent r ação: I r r igação e Dr enagem.
AVALI AÇÃO DO DESEMPENHO DE RECEPTORES GPS
EM LEVANTAMENTOS ALTI MÉTRI COS, PARA FI M
DE SI STEMATI ZAÇÃO DE TERRAS.
ANTONI O CARLOS SI LVEI RA COELHO
Engenheir o Civil
Or ient ador : Pr of . Dr . RUBENS ANGULO FI LHO
Disser t ação apr esent ada à Escola
Super ior de Agr icult ur a “Luiz de Queir oz”,
Univer sidade de São Paulo, par a obt enção do
t ít ulo de Mest re em Agronomia, Ár ea de
concent r ação: I r r igação e Dr enagem.
DadosInternacionais de Catalogação na Publicação (CIP) DIVISÃO DE BIBLIOTECA E DOCUMENTAÇÃO - ESALQ/ USP
C o e lho , Antô nio C a rlo s Silve ira
Ava lia ç ã o d o d e se mp e nho d e re c e p to re s G PS e m le va nta me nto s a ltimé tric o s, p a ra fim d e siste ma tiza ç ã o d e te rra s / Antô nio C a rlo s Silve ira C o e lho . - - Pira c ic a b a , 2003.
128 p . : il.
Disse rta ç ã o (me stra d o ) - - Esc o la Sup e rio r d e Ag ric ultura Luiz d e Q ue iro z, 2003.
Bib lio g ra fia .
1. Altime tria 2. Pro je to s a g ro p e c uá rio s 3. Siste ma d e p o sic io na me nto g lo b a l I. Título
C DD 526.0285
A
Deborah, minha esposa· .
Rodrigo, meu f ilho e razão de minha
vida,
Pelo amor, incentivo e compreensão.
A
Nelson Moraes Coelho e
Maria José Silveira Coelho,
Meus amados pais,
Nelson Jr. e Célia,
Meus irmãos,
Nelson Net o, Arnaldo, Vivian, João
Vit or e Luis Guilherme.
Meus sobrinhos
AGRADECI MENTOS
À Comissão de Pós-graduação do curso de I rrigação e Drenagem da ESALQ/ USP, a opor t unidade concedida.
Ao Depar t ament o de Engenhar ia Rur al da Escola Super ior de Agr icult ur a “Luiz de Queir os”, USP, por int er médio de seu Chef e, Pr of . Dr . J osé Ant onio Fr izzone por possibilit ar a r ealização dest e t r abalho.
Ao meu Or ient ador Pr of . Dr . Rubens Angulo Filho, a compr eensão, a amizade, paciência, dedicação e conf iança em mim deposit ada;
Ao prof essor, Prof . Dr. Valdemar A. Demet rio, do Depart ament o de Engenhar ia Rur al da Escola Super ior de Agr icult ur a “Luiz de Queir oz” pela amizade, incent ivo e colabor ação.
Aos pr of essor es, Dr . Car los Alber t o Vet or azzi do Depar t ament o de Engenhar ia Rur al e ao Pr of . Dr . Ger d Spar ovek do Depar t ament o de Solos da Escola Super ior de Agr icult ur a “Luiz de Queiroz” pelas sugest ões apresent adas na elaboração do present e t rabalho.
A pr of essor a, Dr a. Clar ice G. B. Demet r io, do Depar t ament o de Mat emát ica da Escola Super ior de Agr icult ur a “Luiz de Queir oz” pela amizade, e valor osa colabor ação na avaliação dos dados est at íst icos.
Aos que par t icipar am e colabor ar am no desenvolviment o da
dissert ação, nas pessoas de: Nelson Moraes Coelho Net o, Elif as Valin Net o,
SUMÁRI O
Página
LI STA DE FI GURAS ... viii
LI STA DE TABELAS... ix
RESUMO...x
SUMMARY... xi
1 I NTRODUÇÃO. . . 1
2 REVI SÃO DE LI TERATURA . . . 2
2.1 O Sist ema de Posicionament o Global (GPS) ...2
2.2 Os r ecept or es GPS...5
2.3 Mét odos de posicionament o com GPS ...10
2.4 Fat ores que inf luenciam o desempenho do sist ema GPS ...17
2.5 Levant ament os Alt imét ricos ou nivelament o...19
2.5.1 Mét odos de levant ament o alt imét r ico...21
2.5.1.1 Nivelament o t r igonomét r ico...21
2.5.1.2 Nivelament o geomét r ico (dif er encial)...24
2.5.1.3 Nivelament o dif er encial com o GPS...26
2.5.2 Pr ecisão dos levant ament os alt imét r icos...28
2.5.3 Alt it ude or t omét r ica x alt it ude elipsoidal ...30
2.5.4 Alt imet r ia x GPS...32
3 MATERI AL E MÉTODOS . . . 35
3.1.1 Localização da Ár ea de Est udo...35
3.1.2 Equipament os ut ilizados...36
3.1.2.1 Est ação Tot al mar ca SOKKI A, modelo SET 3 E ...36
3.1.2.2 Base modelo GTRA, mar ca Tech Geo...37
3.1.2.3 Recept or GPS modelo GTR1...38
3.1.2.4 Recept or GPS Gar min modelo Et r ex, de navegação...40
3.1.2.5 Micr ocomput ador ...40
3.1.3. Pr ogr amas comput acionais - Sof t war es...41
3.1.3.1 Sist ema TOPOEVN ...41
3.1.3.2 Aut oCAD LT 2000 - da Aut odesk ...41
3.1.3.3 EZSur v da Tech Geo...42
3.2 Mét odos...42
3.2.1 Seleção das áreas de est udo...42
3.2.2 Planej ament o de Campo...44
3.2.3 Levant ament o t opográf ico dos pont os...46
3.3 Análise Est at íst ica...50
3.3.1 Var iáveis est at íst ica...51
3.3.2 Test e de Wilcoxon...51
3.3.3 Test e de Kr uskal-W allis...53
3.3.4 Análise Explor at ór ia...54
4 RESULTADOS E DI SCUSSÃO . . . 56
4.1 Result ados...56
5 CONCLUSÕES . . . 71
ANEXOS . . . 72
LI STA DE FI GURAS
Paginas
1 - Est r ut ur a das ór bit as dos sat élit es NAVSTAR/ GPS ...3
2 - Dif er ença ent r e cot a e alt it ude - f ont e Gar cia 1984...20
3 - Nível ópt ico e régua graduada, ambos da marca BERGER ...25
4 – alt it ude geomét rica x alt it ude ort omét rica...32
5 – Pivô Cent ral – Fazenda Ar eão – USP –Pir acicaba - S.P...36
6 - Est ação t ot al mar ca SOKKI A modelo SET 3E...37
7 – GPS geodésico - Base GTRA – Tech Geo ...38
8 – GPS geodésico - Recept or GTR1 TechGeo...39
9 - GPS de navegação marca Garmin – modelo Et rex ...40
10 - Localização das ár eas com as r espect ivas declividades;...44
11 - Bast ão com ant ena do GTR1 e prisma para leit ura da est ação t ot al ..47
12 - Os valor es par a Tα e T1-α são dados at r avés de uma t abela apr opr iada, encont rada no livro Est at íst ica experiment al não-par amét r ica, j á ref erenciado ...53
LI STA DE TABELAS
Paginas
1...Classif icação dos recepores GPS de acordo com sua exatidão...9
2 Técnicas de posicionament o por meio da por t ador a e AS (disponibilidade selet iva) em f uncionament o...12
3 Técnicas de posicionament o por meio do código C/ A (códigos) e AS (disponibilidade selet iva) em f uncionament o...13
4 Exat idões do mét odo cinemát ico...15
5 Exat idões do mét odo est át ico...16
6 Classes de acor do com a acur ácia alt imét r ica “A” ...29
7 Coef icient es t écnicos do levant ament o planialt imét rico dos pont os ...47
8 Dados de coordenadas comparat ivas ent re est ação t ot al X GPS geodésico ...48
9 Dados de coordenadas comparat ivas ent re est ação t ot al X GPS de navegação...48
10 Dados dos volumes calculados no Sof t war e TOPOEVN 5.0 ent r e as superf ícies geradas pelos dados obt idos em cada equipament o e a o plano de cot a 519,000...57
11 Dados Est at íst icos do levant ament o planialt imét rico das áreas A, B e C com declividade média de 0 a 1%...58
AVALI AÇÃO DO DESEMPENHO DE RECEPTORES GPS
EM LEVANTAMENTOS ALTI MÉTRI COS, PARA FI M
DE SI STEMATI ZAÇÃO DE TERRAS.
Aut or : ANTONI O CARLOS SI LVEI RA COELHO
Or ient ador : Pr of . Dr . RUBENS ANGULO FI LHO
RESUMO
A const ant e evolução dos equipament os e sof t war es na área de
t opogr af ia pr opiciou um ganho consider ável em pr odut ividade e qualidade na
conf ecção dos mapas que servem de base aos proj et os de Engenharia. O
pr opósit o dest e t r abalho é a analise compar at iva dos dados de alt imet r ia
obt idos por t rês dif erent es equipament os de grande uso no mercado
nacional, ou sej a, a Est ação t ot al, GPS geodésico e GPS navegação, a f im de
poder mos avaliar a possibilidade do uso dos equipament os r ast r eador es GPS
par a elabor ação da hipsomet r ia t er r est r e.
Á área em est udo encont ra-se no Campus “Luiz de Queir oz” da
Univer sidade de são Paulo, no município de Pir acicaba, Est ado de São Paulo,
cuj as coordenadas aproximadas são: lat it ude de 22o42´ 40 “S e longit ude de
47o37´ 30” W, sendo os dados colet ados no mês de j ulho de 2002.
Para avaliar o desempenho dos recept ores GPS de Navegação e
t erras, f oram levant adas áreas com declividades dif erent es (0 a 1%; 2 a 4%
e 5 a 8%), simult aneament e pelo mét odo t opogr áf ico convencional, ut ilizado
uma Est ação Tot al, de acordo com a NBR 13.133 – Execução de
Levant ament o Topogr áf ico, e com os recept ores GPS, sendo post eriorment e
calculados os volumes de t erras para a comp ar ação dos r esult ados.
De acordo com a met odologia empregada e os result ados obt idos, as
pr incipais conclusões f or am: a) f oi possível avaliar o er r o comet ido pelos
equipament os descrit os, conf irmando assim a possibilidade de uso do GPS
Geodésico e descart ando o uso do GPS de navegação para f ins de
sist emat ização de t erras; b) com o uso do GPS dif erencial os volumes ent re
os MDTs (Est ação Tot al x GPS Geodésico) analisados em nove áreas com
declividades dif erent es est a em média 0,67% quando comparada as
super f ícies geradas, o que pode ser considerado como aceit ável, e não
signif icat ivo quando da execução dos serviços de sist emat ização t erras o
que vem r at if icar o uso do equipament o GPS geodésico, se ut ilizados
PERFORMANCE ASSESSMENT OF GPS
RECEI VERS I N LAND LEVELI NG.
Aut hor : Ant onio Car los Silveir a Coelho
Adviser : Pr of essor DR. Rubens Ângulo Filho.
Summary
The const ant evolut ion of t he equipment s and sof t wares in t he
sur veing f ield has br ought a lot of gain in pr oduct ivit y and qualit y t o make
maps t hat are t he f oundat ion f or t he engineering proj ect s.
The purpose of t his work is t he comparat ive analyses of t he dat a
obt ained by 3 dif f erent equipment s t hat are very used in t he nat ional
market - t he Tot al St at ion, t he Geodet ic GPS and t he Navigat ion GPS- in
order t o be able t o evaluat e t he possibilit y of t he use of t he t racking GPS
equipment s f or t he elabor at ion of t he t er r est r ial hypsomet r y.
The st udied area is in t he “Luiz de Queiroz” Campus, in t he Universit y
of São Paulo, in t he cit y of Pir acicaba, São Paulo st at e, whose appr oximat e
coor dinat es ar e: 22 42’40”S of lat it ude, and 47 37’30” W of longit ude,
According t o t he applied met hodology and t he obt ained result , t he
main conclusions are: a) it was possible t o evaluat e t he mist ake by t he
described equipment s, conf irming t he possibilit y of t he use of Geodesic
GPS and discar ding t he use of t he Navigat ion GPS f or land syst emat izat ion;
b) wit h t he use of t he dif f erent ial GPS, t he volume bet ween the MDTs
(Tot al St at ion x Geodesic GPS) analyzed in t hr ee dif f er ent ar eas, t he
average is 067%, which can be considered accept able, and not meaningf ul
when f rom t he execut ion of t he land syst emat izat ion services, what
rat if ies t he use of t he Geodesic GPS equipment , if used according t o t he
O Sist ema de Posicionament o Global - GPS, f oi desenvolvido
pelo Depar t ament o de Def esa dos EUA, or iginalment e com f ins milit ar es
est rat égicos. A part ir de meados da década de set ent a o seu uso f oi
est endido par a aplicações civis, t endo passado por uma cont ínua evolução
desde ent ão. Represent a at ualment e uma nova alt ernat iva de posicionament o
par a a Geodésia, Car t ogr af ia e Topogr af ia, t endo o seu uso cr escido
signif icat ivament e em aplicações na Engenharia e os seus diversos ramos, e
t ambém Geograf ia, Geologia e Navegação (t errest re, marít ima, aérea e
or bit al). Os EUA t êm se dest acado pelo pioneir ismo e pelos múlt iplos t ipos
de emprego do sist ema nessas áreas, sendo que no Brasil, f ace à ext ensão
t er r it or ial e à escassez de inf or mações geor r ef er enciadas, o GPS most r a-se
um recurso part icularment e promissor.
A sua aplicação nas dif er ent es at ividades acima cit adas
necessit a ainda t er respondido uma série de indagações ant es do seu uso
gener alizado, com o que se pr et ende cont r ibuir por meio dest e t r abalho,
cuj a pr opost a pr incipal f oi a obt enção de inf or mações oper acionais sobr e o
uso de dois recept ores GPS, um da cat egoria geodésico e out ro navegação
em levant ament os t opográf icos alt imét ricos, visando a sua aplicação no
2. 1 O Sist ema de Posicionament o Global (GPS)
Segundo Leick (1990), Vet t or azzi et al. (1994), Blit zkow (1995), van
Sickle (1996), Segant ine (1998) e Sá (2000), o sist ema GPS (Global
Posit ioning Syst em) f oi desenvolvido pelo U.S. Depart ment of Def ense
(DoD) como um sist ema de rast reio dos sat élit es NAVSTAR (Navigat ion
Syst em wit h Time and Ranging), que f ormam uma const elação, colocada em
ór bit a da Terra para medição de dist âncias ent re esses sat élit es e est ações
localizadas na super f ície t er r est r e e no espaço. O pr incípio básico de
f uncionament o usado no sist ema GPS consist e na t ransmissão de sinais
elet r ônicos pelos sat élit es, por meio de ondas elet romagnét icas, e na
capt ação desses sinais por recept ores, de t al f orma que o int ervalo de
t empo decorrido no percurso possa ser det erminado. Como a velocidade de
propagação das ondas elet romagnét icas é conhecida (velocidade da luz), as
dist âncias ent r e os sat élit es e o recept or que os rast reia podem ser
calculadas, o que permit e det erminar as coordenadas da posição onde f oi
est acionado o recept or. Assim, o GPS é um sist ema espacial, desenvolvido
or iginalment e par a f ins milit ar es, que f or nece ao usuár io a posição espacial,
a velocidade e o t empo decorrido num sist ema de ref erência comum, a
qualquer inst ant e, em qualquer pont o da superf ície t errest re, e
Apesar do sist ema GPS t er sido desenvolvido e ser mant ido pelo DoD
com obj et ivos milit ar es, o seu gr ande pot encial par a aplicações civis f ez com
que o Congresso Americano ordenasse ao DoD que promovesse o seu uso
civil, que se iniciou em 1982 e desenvolveu-se rapidament e com aplicações do
sist ema em levant ament os geodésicos e sist emas de navegação.
O sist ema GPS é descr it o por Leick (1990), Vet t or azzi et al. (1994),
Blit zkow (1995), van Sickle (1996), Segant ine (1998) e Sá (2000), como
sendo f ormado por uma const elação de 24 sat élit es dist ribuídos em 6 planos
or bit ais dist int os, com inclinação de 55o em relação ao equador e um período
de 12 horas. Com est a conf iguração, em qualquer pont o da superf ície
t errest re ou próximo a ela haverá um mínimo de 4 sat élit es acima do
hor izont e 24 hor as por dia Figur a 1.
Os sinais emit idos pelos sat élit es são caract erizados por um cert o
número de component es, t odos baseados numa f reqüência f undament al (f0)
de 10,23 MHz, cont r olada por oscilador es at ômicos de Césio. Assim, as
ondas por t ador as L1 e L2 são expr essas a par t ir da f r eqüência f undament al
pelas r elações:
L1 = 154 x f0 = 1575,42 MHz (λ = 19,05 cm)
L2 = 120 x f0 = 1227,60 MHz (λ = 24,45 cm)
Essas duas port adoras são moduladas em f ase, por uma f unção degrau, com
dist inção ent r e as f ases cossenoidal e senoidal.
A f ase cossenoidal de ambas as por t ador as (L1 e L2) é modulada por
uma seqüência de pulsos conhecida como código P (preciso ou prot egido). O
código P é ger ado por um algor it mo que se r epet e a cada 267 dias. Esses
267 dias são divididos em 38 segment os de 7 dias. Cada sat élit e t ransmit e
um segment o específ ico de 7 dias do código P, ist o caract eriza cada sat élit e
permit indo que se selecione um em part icular para ser rast reado ent re os
que est ão acima do horizont e.
Out ro código semelhant e ao P, conhecido como código Y poderia ser
ut ilizado, mas como sua equação é secret a e a do código P é de acesso
público, os usuár ios não aut or izados pelo DoD f icam r est r it os à ut ilização do
código P.
A f ase senoidal da por t ador a L1 é modulada por uma seqüência de
pulsos chamada código C/ A (clear / access ou coar se / acquisit ion). O código
C/ A é ger ado pelo algor it mo de Gold em cada sat élit e, se r epet e a cada
As duas port adoras (L1 e L2) cont êm t ambém, a mensagem
t ransmit ida pelo sat élit e, que consist e num f luxo de dados t ransmit idos em
baixa f r equência (50 Hz), inf or mando o usuár io sobr e as condições
operacionais e a posição de t odos os sat élit es que compõem a const elação.
Com r elação à disponibilidade selet iva (S/ A), Bueno (2000) explica que
se t rat a de uma t écnica usada para degradar a exat idão de posicionament o
geodésico, sendo o mét odo de posicionament o absolut o, aquele em que se
emprega soment e um equipament o par a a obser vação do código C/ A, o mais
af et ado. Nesses casos essa degradação f az com que a lat it ude e a longit ude
sej am det erminadas com erro de 100m ou mais.
Ainda segundo Bueno (2000), no dia 1o de maio de 2000, por
det er minação do pr esident e Bill Clint on, a S/ A f oi desat ivada, cont r ibuír am
para essa decisão o programa de modernização do sist ema GPS e o desej o de
incent ivar o uso do GPS par a aplicações civis pacíf icas.
Finalment e, pode-se concluir baseado nas observações de Kovach e
van Dyke (1998) que a decisão pr esidencial de desat ivar a disponibilidade
selet iva e a modernização e aperf eiçoament o no sist ema GPS, bem como as
melhorias esperadas nos recept ores, permit irão uma signif icat iva melhoria
na exat idão de posicionament o e um f ut ur o pr omissor par a a ut ilização civil
do sist ema.
2. 2 Os recept ores GPS
Segundo Segant ine (1998), os recept ores GPS evoluíram muit o desde
mét odos de posicionament o e a elet rônica dos component es evoluíram
bast ant e, result ando em equipament os de dif erent es exat idões para
dif er ent es t ipos de aplicações pr át icas.
Os recept ores at uais podem operar t ant o com o código como e/ ou
f ase da port adora a um cust o reduzido. Est es inst rument os podem ser
ut ilizados em DGPS (cor r eção dif er encial) par a navegação e t ambém em
alguns t ipos de t rabalhos t opográf icos.
Segant ine (1998) t ambém apr esent a a seguint e classif icação dos
recept ores GPS:
a) quant o ao número de f reqüências:
• simples f requência: equipament os que recebem soment e a
f r equência L1;
• dupla f reqüência: são aqueles que recebem as f reqüências L1 e
L2, e que, port ant o permit em acesso aos códigos C/ A e ou P.
b) quant o ao número de canais:
• monocanais: recept ores que possuem apenas uma canal que se
move rapidament e de um sat élit e par a out r o. Apesar de bar at os
t êm a desvant agem de serem imprecisos e lent os no
processament o das coordenadas;
• mult icanais: est es equipament os possuem vários canais
independent es para rast rear, simult aneament e, cada sat élit e
visível no hor izont e. I st o proporciona um processament o mais
rápido e preciso das coordenadas.
• seqüenciais: nest es r ecept or es cada canal r ast r eia um único
sat élit e de cada vez, passando a capt ar dados de out ro sat élit e
t ão logo t enha ar mazenado dados suf icient es par a o cálculo das
coordenadas dos pont os;
• mult iplexados: são inst rument os que t êm o f uncionament o
semelhant e aos ant eriores, com a vant agem de serem mais
rápidos na mudança para a capt ação de out ros sat élit es.
d) quant o ao t ipo de sinal obser vado:
§ r ecept or es que ut ilizam as pseudodist âncias por meio do código C/ A:
são os equipament os normalment e ut ilizados na navegação marít ima,
aérea ou t errest re;
§ r ecept or es das por t ador as L1 e L2 e do código C/ A: são aqueles
normalment e ut ilizados nos t rabalhos geodésicos de precisão;
§ r ecept or es que ut ilizam as pseudodist âncias por meio do código P: são
os r ecept or es const r uídos par a f ins milit ar es e, por t ant o, sob o
cont r ole do DoD;
§ r ecept or es que ut ilizam as pseudodist âncias por meio dos códigos C/ A
e P e ut ilizam as por t ador as L1 e L2: a aplicação dest e t ipo de
equipament o é j ust if icada nos t rabalhos geodésicos de alt a precisão.
Sá (2000) t ambém classif ica os r ecept or es GPS em 4 gr upos em f unção
do t ipo de medida e da disponibilidade dos códigos:
a) r eceptores do código C/ A de pseudodist âncias: são equipament os usados
soment e para medição de dist âncias pelo código C/ A. Geralment e são
comuns, que possuem at é 6 canais independent es e f ornecem a posição
em t ermos de coordenadas geodésicas e, event ualment e, em t ermos de
coor denadas planas da pr oj eção UTM;
b) r ecept or es do código C/ A de f ase da por t ador a: com est e t ipo de
recept or, soment e pseudodist âncias e f ase da port adora L1 podem ser
obt idas porque o código não é modulado na L2. Port ant o não f ornece
dados em duas f reqüências. A maioria dos equipament os possui no mínimo
4 e no máximo 12 canais independent es. Esses inst rument os
desempenham t odas as f unções dos modelos previament e descrit os, além
de armazenar o t empo decorrido e a f ase da port adora em algum t ipo de
memória;
c) recept ores do código P: esse t ipo de equipament o proporciona o rast reio
das por t ador as L1 e L2. Os códigos P dessas por t ador as são obt idos pela
cor r elação dos sinais t r ansmit idos pelos sat élit es, com as r éplicas dos
códigos P gerados no recept or. Para isso, a est rut ura do sinal deve ser
conhecida. Os recept ores do código P t êm a vant agem de medir
dist âncias com a exat idão de alguns cent ímet ros, com apenas 10 minut os
de r ast r eio;
d) recept ores do código Y: recept ores desse t ipo permit iam acesso ao
código P com a SA at ivada. Logo, os códigos de dist ância e f ases podem
ser det er minados a par t ir das por t ador as L1 e L2 pela t écnica de
de um Auxiliar y Out put Chip (AOC) em cada canal do r ecept or . Esse
"chip" pr opor ciona a decodif icação do código Y em P e a degr adação
decorrent e da SA. Ent ret ant o, soment e usuário aut orizado pelo DoD t em
acesso ao AOC.
Ainda com r elação à classif icação de r ecept or es GPS, Vet t or azzi et
al. (1994) mencionam o alt o pot encial de uso do GPS nas at ividades agr ár ias,
em especial no Br asil. Descr evem uma classif icação da exat idão obt ida com a
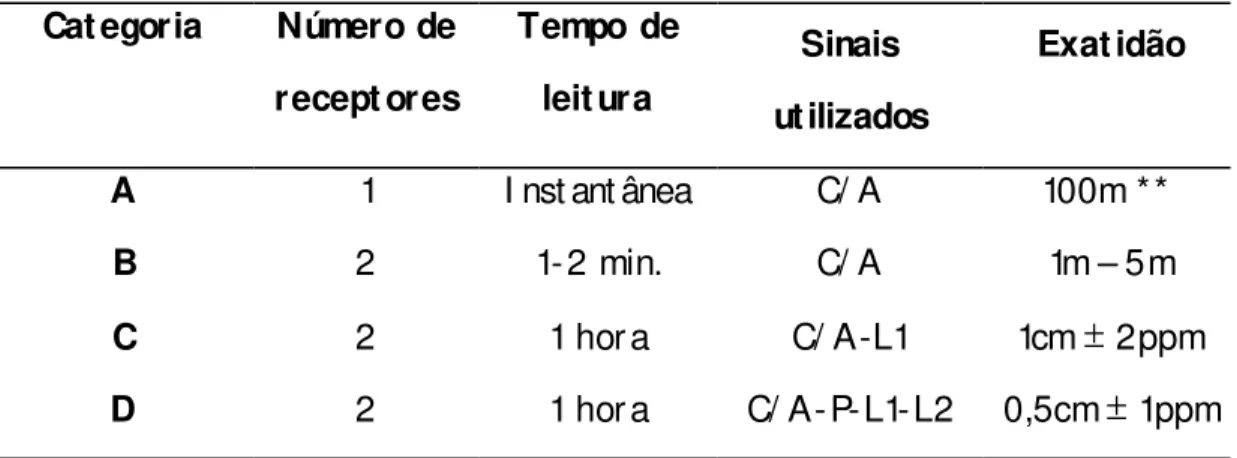
t ecnologia GPS, conf orme expost o na Tabela 1, cit ando que par a gr ande
part e das at ividades com pot encialidade de emprego do GPS nas áreas
agrícola e f lorest al, equipament os pert encent es à cat egoria B poderão ser
empregados sat isf at oriament e.
Tabela 1. Classif icação dos r ecept or es GPS de acordo com sua exat idão.
Cat egoria Número de
recept ores
Tempo de
leit ura
Sinais
utilizados
Exat idão
A 1 I nst ant ânea C/ A 100m **
B 2 1-2 min. C/ A 1m – 5m
C 2 1 hor a C/ A-L1 1cm ± 2ppm
D 2 1 hor a C/ A-P-L1-L2 0,5cm ± 1ppm
** Nest a época a SA ainda est ava oper acional. Font e: Vet t or azzi et al.
(1994).
Conf ir mando a impor t ância do t ipo de r ecept or ut ilizado em
levant ament os GPS, Segant ine (1998) explica que o t ipo de dado colet ado
pelo recept or t em um impact o diret o na exat idão alcançada, e, geralment e,
disponíveis no mercado são aqueles que f ornecem o posicionament o em
t empo real, baseado soment e no código C/ A com exat idão da ordem de 100m
na hor izont al e 150m na ver t ical quando a SA est ava em f uncionament o.
Recept ores com código P são similares em operação, mas of ereciam uma
exat idão de 25m na horizont al e 30m na vert ical (S/ A em f uncionament o),
mas est á rest rit o ao uso milit ar. Por out ro lado equipament os que operam
com a observação da f ase da port adora, em vez da pseudodist ância, são mais
exat os.
Hoj e, com a S/ A desat ivada espera-se que a exat idão de
posicionament o, no mét odo absolut o, melhore em at é 10 vezes segundo
Benevent o (2000). O aut or inf or ma t ambém que, nas det er minações em que
se aplica a cor r eção dif er encial (DGPS) a exat idão não deve ser af et ada,
pois o erro devido a S/ A j á é prat icament e t ot alment e ret irado no processo
de correção.
2. 3 Mét odos de posicionament o com GPS
Par a Bueno (1995), exist em diver sos mét odos de ut ilização do sist ema
GPS, a t odos t êm por pr incípio a medida da dist ância ent r e o sat élit e e o
recept or. Ainda segundo o aut or as classif icações dos mét odos de
posicionament o podem seguir diver sos cr it ér ios:
1. t endo em cont a a exist ência ou não de um pont o com coordenadas
conhecidas par a ser ut ilizado como r ef er ência:
• sem pont o de ref erência = absolut o;
• com pont o de r ef er ência = r elat ivo.
• dist ância obt ida pelo código;
• dist ância obt ida pela por t ador a;
• dist ância obt ida pela comb inação de ambas.
2. considerando o t empo empregado na observação:
• longo t empo de observação;
• curt o t empo de observação;
• em t empo real.
Ainda segundo Bueno (1995), os mét odos de posicionament o
dif er encial est át ico são os mais pr ecisos dent r e os que ut ilizam a t ecnologia
GPS, e podem ser subdivididos em 5 variant es: base simples; solução em
r ede; solução com r elaxação or bit al; pseudocinemát ico; e r ápido-est át ico.
Sá (2000) abor da os pr incipais t ipos de posicionament o de maneir a
semelhant e a Bueno (1995) e af irma que os problemas de posicionament o que
geralment e aparecem na prát ica podem ser classif icados, quant o ao
ref erencial e número de pont os envolvidos em:
1. absolut o: det erminação das coordenadas de pont os diret ament e
associadas a um ref erencial e usando um recept or;
2. relat ivo: det erminação das dif erenças de coordenadas ent re 2
pont os e ut ilizando 2 r ecept or es;
3. f orma de rede: det erminação das coordenadas de um conj unt o de
pont os, usando mais de 2 recept ores.
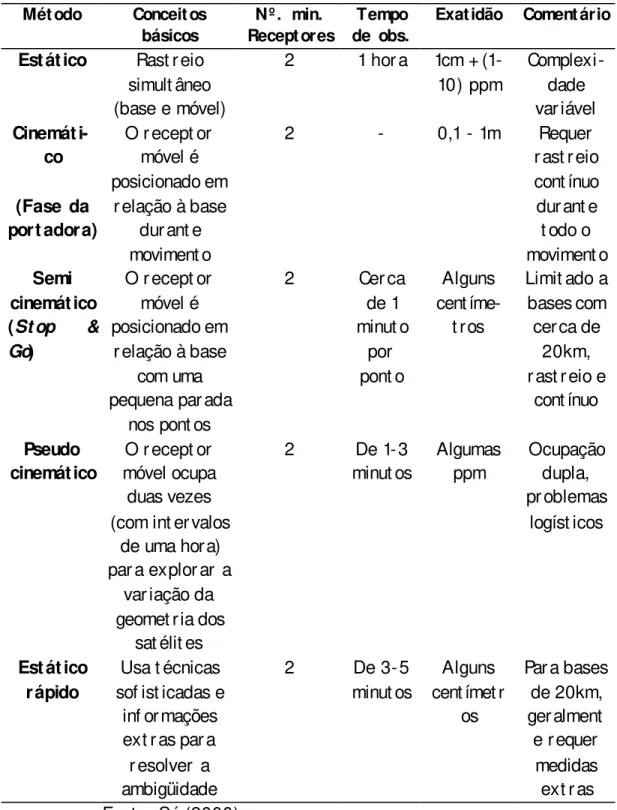
Ainda segundo Sá (2000), o posicionament o GPS baseia-se
pr incipalment e na medição do código ou da f ase da por t ador a e apr esent a
Tabela 2. Técnicas de posicionament o por meio da por t ador a e AS (disponibilidade selet iva) em f uncionament o
Mét odo Conceit os básicos
Nº. min. Recept ores
Tempo de obs.
Exatidão Coment ário
Est át ico Rast r eio simult âneo (base e móvel)
2 1 hor a 1cm +
(1-10) ppm Complexi-dade var iável Cinemát i-co
(Fase da port adora)
O r ecept or móvel é posicionado em
r elação à base dur ant e moviment o
2 - 0,1 - 1m Requer
r ast r eio cont ínuo durant e
t odo o moviment o Semi
cinemático
(St op &
Go)
O r ecept or móvel é posicionado em
r elação à base com uma pequena par ada
nos pont os
2 Cer ca
de 1 minut o por pont o Alguns cent íme-t ros
Limit ado a bases com
cerca de 20km, r ast r eio e
cont ínuo
Pseudo cinemático
O r ecept or móvel ocupa
duas vezes (com int er valos
de uma hora) par a explor ar a
var iação da geomet ria dos
sat élit es
2 De 1-3
minut os Algumas ppm Ocupação dupla, pr oblemas logíst icos
Est át ico rápido
Usa t écnicas sof ist icadas e
inf ormações ext r as par a r esolver a ambigüidade
2 De 3-5
minut os
Alguns cent ímet r
os
Par a bases de 20km, geralment
e requer medidas
A precisão e a exat idão dos mét odos de posicionament o são out ros
aspect os que devem ser considerados. Assim August et al. (1994) avaliaram
a pr ecisão e a exat idão do GPS com e sem cor r eção dif er encial, conf ir mando
a ef iciência dest a sobr e a dist or ção pr ovocada pela Disponibilidade Selet iva
(SA). Det erminaram como a exat idão se comport a, est ando o aparelho
est acionado em um pont o, à medida que cresce o número de dados colet ados
em um período de t empo, at é um máximo de 300 leit uras.
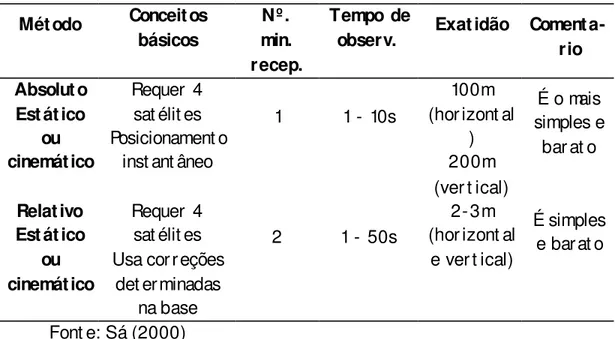
Tabela 3. Técnicas de posicionament o por meio do código C/ A (códigos) e AS (disponibilidade selet iva) em f uncionament o
Mét odo Conceit os
básicos
Nº. min. recep.
Tempo de
observ. Exat idão Comenta-rio
Absolut o Est át ico
ou cinemático
Requer 4 sat élit es Posicionament o
inst ant âneo
1 1 - 10s
100m (hor izont al
) 200m (ver t ical)
É o mais simples e
bar at o
Relat ivo Est át ico
ou cinemático
Requer 4 sat élit es Usa correções
det erminadas na base
2 1 - 50s
2-3m (hor izont al
e ver t ical)
É simples e barat o
Font e: Sá (2000)
Observaram que menos de 20 repet ições por pont o melhoram muit o
pouco a exat idão, enquant o 50 repet ições ou mais melhoram marcadament e
t ant o a exat idão quant o à precisão. Ressalt a-se que os result ados f oram
obt idos em condições ext remament e f avoráveis de levant ament o, sendo que
pobre dos sat élit es e obst ruções ent re o recept or e o sat élit e, são
provavelment e menos precisos.
Em sua descrição do sist ema GPS, o I BGE (1994) relat a a necessidade
de int er visibilidade ent r e a est ação e o sat élit e. Uma vez que os sinais
t ransmit idos podem ser absorvidos, ref let idos ou ref rat ados por obj et os
próximos à ant ena ou ent re a ant ena e o sat élit e, recomenda que o horizont e
em t orno da ant ena est ej a desobst ruído acima de 15 graus. Deve-se evit ar
locais próximos a est ações de t ransmissão de microondas, radares, ant enas
r ádio-repet idoras e linhas de t ransmissão de alt a volt agem, por
represent arem f ont es de int erf erência para os sinais GPS. O ef eit o de
ret ardo do sinal causado pela sua ref lexão é chamado de mult icaminhament o
(mult ipat h) e a f im de minimizar esse problema, a área sit uada a 50 met ros
da est ação deve est ar livr e de est r ut ur as ar t if iciais, par t icular ment e
paredes e cercas met álicas. Esse ef eit o é f unção da geomet ria da
conf iguração dos sat élit es observados, que por sua vez se modif ica com o
t empo. Ref erindo-se a posicionament os est át icos, ressalt a que, dest a f orma,
quant o maior o per íodo de obser vação, maior a pr obabilidade de r edução dos
ef eit os do mult icaminhament o. Quant o à escolha da t axa de observação
(int er valo de t empo ent re a gravação de observações consecut ivas), est a
depende da t écnica de posicionament o ut ilizada no levant ament o. A r egr a
ger al é que quant o maior a t axa de obser vação, mais f ácil é a det ecção e a
cor r eção da per da de ciclos. Por out r o lado, uma t axa alt a ger a ar quivos de
observação muit o grandes, dif icult ando sua manipulação. De uma maneira
segundos t em se most rado adequado. Para posicionament os cinemát icos, uma
t axa mais alt a pode se necessária.
Ainda com relação às exat idões possíveis de serem alcançadas pelos
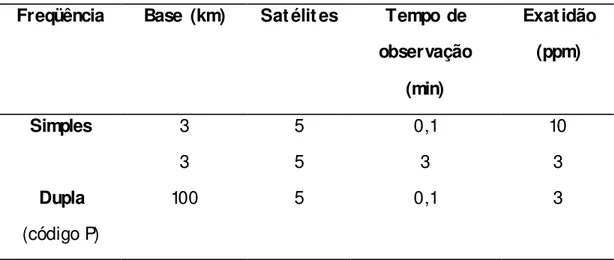
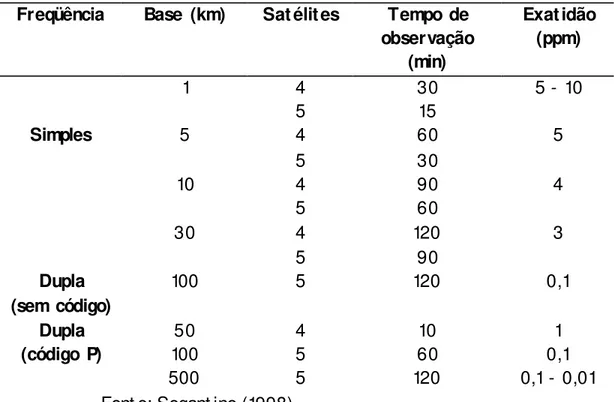
mét odos cinemát ico e est át ico de levant ament os GPS, Segant ine (1998)
apresent a as t abelas 4 e 5.
Tabela 4. Exat idões do mét odo cinemát ico.
Freqüência Base (km) Sat élit es Tempo de
observação
(min)
Exatidão
(ppm)
Simples 3
3
5
5
0,1
3
10
3
Dupla
(código P)
100 5 0,1 3
Tabela 5. Exat idões do mét odo est át ico
Freqüência Base (km) Sat élites Tempo de
observação (min)
Exatidão (ppm)
1 4
5
30 15
5 - 10
Simples 5 4
5
60 30
5
10 4
5
90 60
4
30 4
5
120 90
3
Dupla (sem código)
100 5 120 0,1
Dupla (código P)
50 100 500 4 5 5 10 60 120 1 0,1 0,1 - 0,01 Font e: Segant ine (1998)
No que diz respeit o à aquisição de dados por recept ores GPS, segundo
Vidal (1999) as inf or mações obt idas a par t ir de um r ecept or GPS são
organizadas segundo padrões específ icos com recomendações mínimas que
são ident if icadas at ravés dos arquivos de dados gerados pelo r ecept or .
Após a recepção, os arquivos são t ransf eridos e processados em um
microcomput ador. Esse processament o será f eit o por um programa
específ ico que gerará um out ro arquivo de saída em f ormat o compat ível com
o programa que acompanha o GPS. Tais ar quivos t razem inf ormações como:
ident if icação do pont o, lat it ude, longit ude, alt it ude e at r ibut os def inidos
2. 4 Fat ores que inf luenciam o desempenho do sist ema GPS
Segundo Pessoa (1997), o GPS vem se consolidando como sist ema padrão
para georref erenciament o em t odo o mundo. Ent ret ant o, para melhor
aproveit ament o é import ant e conhecer suas principais limit ações:
a) Geomet ria da const elação de sat élit es: de uma maneira geral, o DOP
(Dilut ion of Pr ecision) quant if ica a inf luência da geomet r ia inst ant ânea do
conj unt o de sat élit es acima do horizont e. O DOP pode ser dividido em
PDOP, HDOP, VDOP e TDOP, r esponsáveis r espect ivament e pelas
pr ecisões do posicionament o t r idimensional, hor izont al, ver t ical e da
det erminação do t empo. Desse modo, no posicionament o inst ant âneo com
um único r ast r eador , a exat idão obt ida ser á t ant o pior quant o maior f or
o valor do DOP no inst ant e da det erminação;
b) At mosf era: os ef eit os at mosf éricos sobre o GPS são devidos
pr incipalment e às inf luências da ionosf er a e da t r oposf er a. O r ef lexo do
ef eit o ionosf ér ico pode var iar de 1m a 100m e é uma f unção da posição,
t empo e f r equência ut ilizada. O ef eit o da ionosf er a pode ser eliminado
pela combinação das f r eqüências L1 e L2. Por essa r azão, par a aplicações
de alt a pr ecisão ou no r ast reament o relat ivo de bases longas,
inst rument os de duas f reqüências devem ser ut ilizados. J á o ef eit o da
t r oposf er a independe da f r equência ut ilizada e não é cor r elacionado com
a dist ância ent re est ações. Por esse mot ivo, o at raso gerado pela
r ef r ação t r oposf ér ica nos sinais r ast r eados é cr it ico par a as
det erminações GPS, not adament e em relação à alt imet ria. A correção
t eór icos da t r oposf er a e é mais signif icat ivo em aplicações geodésicas
com ut ilização das f reqüências port adoras que na navegação;
c) Mult icaminhament o: out ra f ont e de dist orções sobre o sinal t ransmit ido
é o ef eit o do mult icaminhament o, result ado da ref lexão indesej ada do
sinal por obst áculos pr óximos à ant ena r ecept or a, podendo af et ar t ant o a
propagação de códigos quant o port adoras, sendo duas vezes maior no
código P que na por t ador a.
Para Gilbert (1997a), o mult icaminhament o é provavelment e uma das mais
f reqüent es f ont es de erro GPS. Esses erros ocorrem quando o recept or
r ecebe um sinal r ef let ido somado ao sinal or iginal que per cor r e um caminho
dir et o par a a ant ena GPS. Essa int er f er ência pode r esult ar em degr adação
da posição, que varia desde um erro de alguns met ros at é dezenas de
met ros. I sso ocorre quando o recept or it inerant e é carregado em uma área
onde os sinais de mult icaminhament o são present es, recebendo assim sinais
errados que a est ação base não recebe. Como esses erros não são comuns a
ambos recept ores, não são removidos por correção dif erencial. Os
dif er ent es r ecept ores GPS variam muit o quant o a sua resist ência em aceit ar
os sinais de mult icaminhament o.
Ainda segundo Gilber t (1997b), os f at or es mais impor t ant es que
det erminam o sucesso de obt enção de valores posicionais com o GPS, sob
condições de cobert ura veget al, podem ser enquadrados em t rês grandes
cat egor ias: 1) o ambient e; 2) as t écnicas de colet a de dados; e 3) o
equipament o GPS. Os pr incipais f at or es ambient ais são as car act er íst icas da
dados, os result ados podem ser dif erent es quando se colet am dados do
modo est át ico ou em moviment o. As t écnicas de processament o de sinais
empregadas t ambém t êm impact o sobre os result ados. O recept or e a
ant ena desempenham um papel import ant e no sucesso do t rabalho sob
condições de cobert ura.
Conf ir mando a impor t ância da t écnica de colet a de dados, Angulo Filho
(2001) af irma que o aument o do t empo de permanência sobre o pont o
levant ado, de maneira geral, melhorou a exat idão de posicionament o
planimét r ico, o que rat if ica a escolha da met odologia de levant ament o como
sendo f undament al para obt enção de bons result ados de posicionament o.
2. 5 Levant ament os Alt imét ricos ou nivelament o
Segundo Domingues (1998), da-se o nome de nivelament o ou
levant ament o alt imét rico à det erminação do relevo de um t erreno, obt
endo-se, por meio de processos específ icos, as alt it udes, as cot as ou as
dif erenças de alt it udes ou de cot as, dos diversos pont os desse t erreno. Nos
levant ament os de precisão def ine-se alt it ude ou cot a or tomét ricas de um
pont o como sendo a dist ancia vert ical desses pont os ao nível do mar e, cot a
de um pont o, a dist ancia vert ical ent re esse pont o e uma superf ície
equipot encial, dif erent e da superf ície de nível zero, t omada como
r ef er ência.
Par a Gar cia e Piedade (1984), a alt it ude de um pont o da super f ície
superf ície média dos mares (denominada Geóide) e a cot a de um pont o da
super f ície t er r est r e, pode ser def inida como a dist ância ver t ical dest e
pont o à uma super f ície qualquer de r ef er ência (que é f ict ícia e que,
port ant o, não é o Geóide). Est a superf ície de ref erência pode est ar sit uada
abaixo ou acima da superf ície det erminada pelo nível médio dos mares.
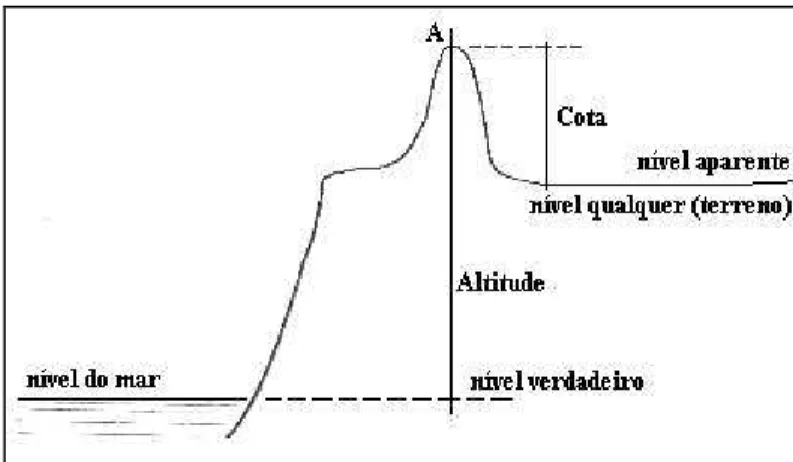
Segundo Espar t el (1987), a alt it ude cor r esponde um nível ver dadeir o,
que é a super f ície de r ef er ência par a a obt enção da DV ou DN e que coincide
com a superf ície média dos mares, ou sej a, o Geóide.
Alt it ude →→ Nível Verdadeiro
À cot a corresponde um nível aparent e, que é a superf ície de
r ef er ência par a a obt enção da DV ou DN e que é par alela ao nível
ver dadeir o, conf or me f igur a 02.
Cot a → Nível Apar ent e
2. 5. 1 Mét odos de levant ament o alt imét rico
Segundo Domingos (2000), os levant ament os com f inalidade de
implant ar ou est ender o cont r ole alt imét r ico at r avés de t écnicas
convencionais dividem-se basicament e em:
• Nivelamento trigonométrico; • Nivelamento geométrico;
• Nivelamento dif erencial com GPS;
A det erminação e o t ransport e de alt it udes com o GPS t em nível de
acur ácia inf er ior ao das coor denadas. Deve-se ist o basicament e a f at ores
geomét ricos inerent es à conf iguração dos sat élit es e ao f at o de que ao se
t ranspor t ar alt it udes ort omét ricas ou com respeit o ao nível do mar, passam
a int egr ar os pr oblemas var iáveis geof ísicas. Est as dizem r espeit o
basicament e ao campo de gravidade t errest re e que redundam na
necessidade do emprego de mapas ou modelos geoidais.
2. 5. 1. 1 Nivelament o t rigonomét rico
Domingos (2000), af irma que as medidas angulares em nivelament o
t r igonomét r ico são ef et uadas no plano ver t ical do lugar . Dessa f or ma
af et am as det erminações decorrent es de t ais medidas o ef eit o da curvat ura
t er r est r e e a r ef r ação at mosf ér ica. A eliminação ou cor r eção de t ais
ef eit os é obt ida at ravés de t écnicas de medição ou de correções ef et uadas
O ef eit o combinado na det er minação alt imét r ica da r ef r ação
at mosf ér ica e da cur vat ur a t er r est r e pode ser quant if icado
aproximadament e pela expressão
(r+c) = 0, 0675⋅⋅d 2,
onde (r +c) é o valor de ef eit o conj unt o de r ef r ação e cur vat ur a
t errest re em met ros (m) e d é a dist ância nivelada em quilômet ros (km).
Da expressão depreende-se que para um lance de nivelament o da
or dem de 5 km, o ef eit o conj unt o implicará em uma dif erença ent re o valor
real e o observado da ordem de 1,7 m. A exat idão do nivelament o
t rigonomét rico é uma f unção que depende basicament e das condições
at mosf ér icas e da exat idão do ângulo ver t ical obser vado, uma vez que as
dist âncias observadas com os MED (medidores elet rônicos de dist âncias)
são normalment e de precisão superior à medidas angulares. Para dist âncias
niveladas por lances superiores a 300 m, devem, port ant o ser ef et uadas as
reduções conj unt as de r ef r ação e cur vat ur a t er r est r e.
Nas operações t rigonomét ricas os melhores result ados decorrem de
visadas menores que 5 km. São desaconselháveis lances longos no
desenvolviment o das poligonais que obj et ivam, t ambém, det erminações
alt imét r icas. No nivelament o t rigonomét rico deverão ser observadas as
seguint es prescrições:
1. Pont os de part ida e chegada dist int os e de acurácia superior às exigidas
2. Medição de ângulos zenit ais at ravés de visadas recíprocas (o uso de
r ecípr ocas e simult âneas é opcional), com desnível ent re as est ações
sendo obt ido a part ir da média dos desníveis observados em ambos os
sent idos.
3. Hor ár io de obser vação ent r e 10:00 h e 16:00 h (hor a local).
4. Ângulos zenit ais medidos em uma série de 6 observações independent es.
5. Variação máxima ent re as medidas angulares de 8”.
6. Observações met eorológicas de t emperat ura, umidade relat iva e pressão
baromét rica no moment o das observações.
7. I nst rument o de resolução vert ical igual ou melhor que 2”.
8. Dist âncias observadas em uma série de seis medidas. Uma série complet a
de medidas consist e em uma seqüência de observações independent es, na
qual o inst rument o é apont ado para o prisma e t em suas leit uras
repet idas.
9. Deverão ser ut ilizadas as const ant es adit ivas do sist ema de medição de
dist âncias (dist anciômet r o e pr ismas) quando aplicáveis.
10. Correções at mosf éricas das medidas elet rônicas e geomét ricas (ao
horizont e, nível médio, corda ao arco) deverão ser ef et uadas sempre que
as dist âncias observadas f orem superiores a 2,5 km.
11. O desenvolviment o deverá ser de no máximo 10 lances ent re pont os de
alt it ude conhecida;
2. 5. 1. 2 Nivelament o geomét rico (dif erencial).
Par a Domingos (2000), o uso do nível de pr ecisão (f igur a 3), par a
execução do nivelament o geomét rico, deverá ser empregado sempre que o
t r anspor t e alt imét r ico exigir pr ecisão compat ível com a Classe A2 ou
super ior est abelecida pela NB 13133 da ABNT. Na obt enção dos desníveis
ent r e r é e vint e, dever ão ser ut ilizados inst r ument al e obser vadas as
prescrições seguint es:
1. Níveis de precisão com sensibilidade mínima de 40”/ 2mm.
2. Níveis a laser ou aut omát icos que ut ilizem código de bar r as.
3. Os lances de nivelament o t erão ext ensão máxima de 200 m, inst rument o
est acionado, aproximadament e, no meio do lance de modo a eliminar a
propagação de erros sist emát icos da curvat ura t errest re e da ref ração;
4. A discrepância máxima ent re as dist âncias das visadas a ré e a vant e
será de 10 m.
5. Cada seção, segment o de linha ent re duas ref erências de nível (RNs),
deverá ser nivelada em ida e volt a e t erá um compriment o máximo de 3
km.
6. O compriment o máximo do circuit o deverá ser de 25 km.
7. Dever ão ser ut ilizadas mir as dobr áveis ou t elescópicas com gr aduação
cent imét r ica calibr ada.
8. As leit ur as est adimét r icas deverão ser ef et uadas a uma dist ância mínima
9. Ut ilizar sapat as par a posicionar a mir a, nunca a colocando dir et ament e
sobre o solo.
10. As r ef er ências de nível (RNs) ser ão car act er izadas por mar cos de
concr et o, idênt icos aos ut ilizados na mat er ialização de est ações
poligonais geodésicas, com placa ident if icador a com inscr ições pr ópr ias.
11. Dif er ença máxima aceit ável ent r e nivelament o e cont r a-nivelament o de
uma sessão para as classes A1 e A2 respect ivament e 8mm D e
D mm
12 , onde D é a dist ância percorrida na sessão em km.
Figur a 3- Nível ópt ico e régua graduada, ambos da marca BERGER
O uso do nivelament o geomét rico embora sej a o mais preciso, t em
como f at ores limit ant es para seu uso, o t empo de t rabalho e o seu cust o,
sendo, port ant o em grandes áreas ut ilizados o mét odo de levant ament o
2. 5. 1. 3 Nivelament o dif erencial com o GPS
Ainda Domingos 2000 coment a que, a grandeza correspondent e à
alt it ude or t omét r ica e que é obt ida dir et ament e pelo GPS é a alt ur a
elipsoidal ou separação ent re a superf ície t errest re e uma superf ície
elipsoidal de revolução. Est a t em carát er purament e geomét rico e é
decorrent e de uma t ransf ormação mat emát ica ent re coordenadas
car t esianas [X, Y, Z] e geodésicas [ϕ, λ, h]. Ao cont r ár io, a alt it ude
ort omét rica t em ligação int rínseca com o campo de gravidade e t em,
port ant o um comport ament o não def inido mat emat icament e. A combinação
ent r e a alt ur a elipsoidal, a separ ação geóide-elipsóide e a alt it ude
ort omét rica f ornecem, o meio corret o para t ransport e em quest ão como
demonst ra a expressão:
∆
∆H = ∆∆h - ∆∆N
onde: ∆H é a dif er ença das alt it udes or t omét r icas ent r e dois pont os
∆N é dif erença das ondulações geoidais ent re os pont os
∆h é a dif er ença ent r e as alt ur as elipsoidais dos pont os
Os valor es de ondulação geoidal podem ser obt idos da int er polação
sobre mapas geoidais ou obt idos de modelos do geopot encial. Em ambos o
caso é necessário est ar at ent o para o sist ema geodésico ou dat um ao qual as
medidas est ão r ef er idas. O mapa geoidal do Br asil, publicado pelo
I BGE/ EPUSP f or nece valor es r ef er idos ao dat um SAD69 e deve r elacionar
as alt it udes or t omét r icas com as alt ur as elipsoidais r eduzidas a est e
alt it ude ort omét rica est ej a ref erida ao SAD-69 ant es da aplicação da
correção ref erent e à separação geóide-elipsóide f or necida pelo mapa
publicado pelo I BGE/ EPUSP quando da ut ilização dest e.
O nivelament o dif erencial com o GPS deverá ser ef et uado mediant e
as seguint es especif icações:
1. Ut ilizar -se-á de t écnicas dif er enciais.
2. Dever á ut ilizar como obser váveis par a o pr ocessament o dif er encial a
dupla dif er ença de f ase da por t ador a.
3. Modo de rast reament o est át ico, rápido est át ico ou pseudocinemát ico,
desde que obedecidas as condições ref erent es aos modos de
rast reament o.
4. A expr essão ∆H = ∆h - ∆N deverá ser empregada levando em consideração
a convenção que valores de ondulação geoidal posit ivos (+) indicam a
super f ície geoidal sit uada acima do elipsóide e vice-ver sa.
4. Consider ando que as ondulações geoidais são obt idas com acur ácia
relat iva de 10 mm/ km, est e deverá ser o máximo nível de acurácia garant ido no nivelament o com o GPS com nível de conf iança de 68% (1σ).
5. Considerando-se que os erros de t ransport e com o GPS compõem-se
aleat or iament e com os er r os do mapa, a acur ácia f inal dever á ser o
result ado da propagação de ambos, ou sej a, a composição do erro de
2. 5. 2 Precisão dos levant ament os alt imét ricos
A pr ecisão, t oler ância ou er r o médio de um nivelament o é f unção do
perímet ro percorrido com o nível (em km) e, de acordo com GARCI A e
PI EDADE (1984), classif ica-se em:
• Alt a ordem: o erro médio admit ido é de ±1,5mm/ km
per cor r ido.
• Primeira ordem: o erro médio admit ido é de ±2,5mm/ km
per cor r ido.
• Segunda ordem: o erro médio admit ido é de 1,0cm/ km
per cor r ido.
• Terceira ordem: o erro médio admit ido é de 3,0 cm/ km
per cor r ido.
• Quart a ordem: o erro médio admit ido é de 10,0cm/ km
per cor r ido.
Onde o erro médio é avaliado da seguint e f orma:
Par a poligonais f echadas: é a soma algébr ica das dif er enças de nível
par ciais (ent r e t odos os pont os).
Par a poligonais aber t as: é a soma algébr ica das dif er enças de nível
par ciais (ent r e t odos os pont os) no nivelament o (ida) e no cont r anivelament o
Est e erro, ao ser processado, poderá result ar em valores dif erent es
de zero, para mais ou para menos, e deverá ser dist ribuído
proporcionalment e ent re as est ações da poligonal, caso est ej a abaixo do
er r o médio t ot al t emível.
Assim, par a ESPARTEL (1987), o er r o médio t ot al t emível em um
nivelament o para um perímet ro P percorrido em quilômet ros, deverá ser:
P mm
m =±5
ε
E o erro máximo admissível, segundo o mesmo aut or, deverá ser:
m
ε ε=2,5.
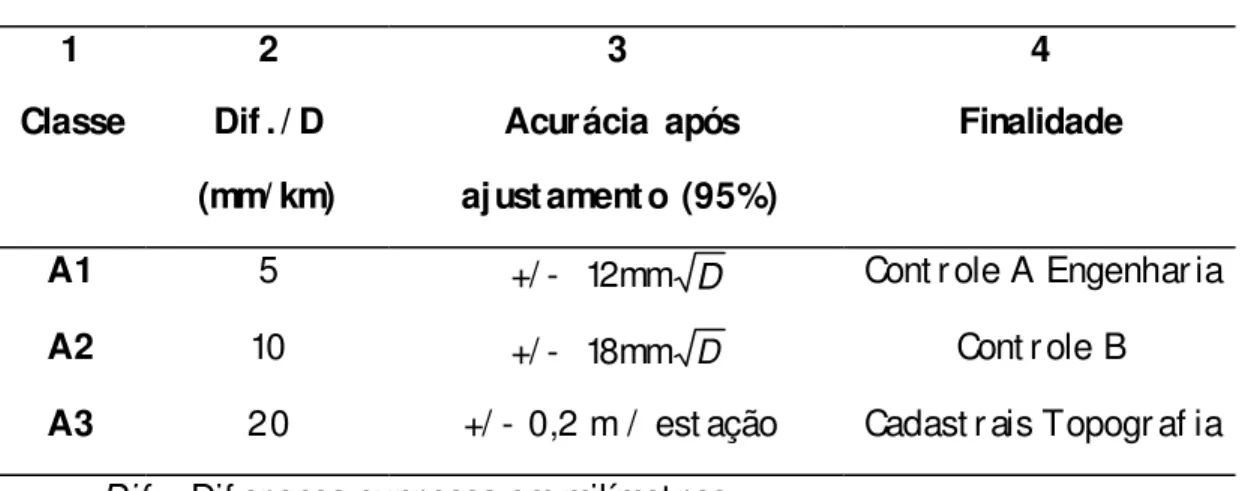
Segundo ABNT (1994) os valores limit es de classes aceit áveis são os
descr it os na t abela 6 abaixo.
Tabela 6. Classes de acor do com a acur ácia alt imét r ica “A”
1 2 3 4
Classe Dif . / D
(mm/ km)
Acurácia após
ajust ament o (95%)
Finalidade
A1 5 +/ - 12mm D Cont r ole A Engenhar ia
A2 10 +/ - 18mm D Cont r ole B
A3 20 +/ - 0,2 m / est ação Cadast r ais Topogr af ia
Dif.= Dif erença expressa em milímet ros
2. 5. 3 Alt it ude ort omét rica x alt it ude elipsoidal
Par a Timbó (2000), o r esult ado do levant ament o GPS ut ilizando
levant ament o r elat ivo dif er encial é um poliedr o de est ações com as posições
relat ivas conhecidas com alt a precisão, porem o erro de posição da est ação
da base ou de ref erencia será propagado para as est ações moveis, por isso é
desej ável que o pont o f ixo t enha coordenadas geocênt ricas precisas. Est as
posições podem ser expr essas por coor denadas elipsoidais (geodésicas)
lat it ude, longit ude e alt it ude. A alt it ude ut ilizada na pr at ica e adot ada
of icialment e no Brasil é ref erida ao geóide (chamada alt it ude ort omét ricas
h). As alt it udes f or necidas pelo GPS são alt it udes elipsoidais ou alt it udes
geomét ricas (H), ref eridas ao dat um de WGS84. As duas alt it udes são
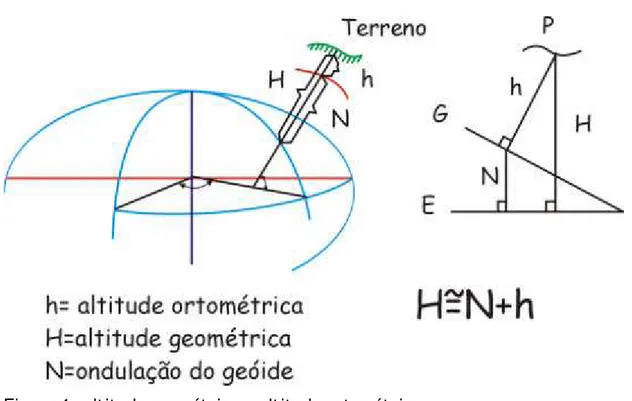
ligadas pela Alt ur a Geoidal at r avés da f or mula abaixo.
H = h + N
Alt ur a geoidal ou ondulação geoidal (N) – é o desnível da superf ície do
geóide acima ou abaixo da superf ície de um det erminado elipsóide, conf orme
ilust r a a f igur a 4.
O conheciment o da alt ura geoidal é de suma import ância nas medições
alt imét ricas por meio do Sist ema GPS. A alt it ude GPS deve ser subt raída da
alt ur a geoidal par a f icar r ef er ida ao geóide. A alt ur a geoidal pode ser obt ida
por int ermédio do mapa ou modelo geoidal. Exist em modelos geoidais
precisos disponíveis para varias part es do mundo. Est es modelos geoidais
precisos são baseados na expansão dos harmônicos esf éricos do campo da
gr avidade t er r est r e e incor por am dados da gr avidade par a levar em
precisos o GPS t em o pot encial para subst it uir grandes part es das
oper ações convencionais de nivelament o geomét r icos em muit as aplicações.
Os mapas e modelos geoidais publicados pelo I BGE est ão ref erenciados ao
dat um SAD69, por t ant o é necessár io t r ansf or mar as coor denadas WGS84
em SAD69 ant es de aplicar os mapas/ modelos geoidais do I BGE par a
conversão de alt it udes.
Ainda Timbó (2000), o modelo global mais comum é o OSU-91A com
resolução de 50 km. Seu erro absolut o no Brasil é da ordem de 2 m e o erro
r elat ivo da or dem de 1mm/ km. A ausência e má dist r ibuição de dados
gravimét ricos em cert as regiões da Terra podem degradar os modelos,
cert as anomalias geoidais podem est ar ausent es no mapa. Só há sent ido na
conver são de alt it udes no posicionament o r elat ivo, pois o er r o nas
det erminações isoladas é geralment e superior à ondulação geoidal.
Out ra solução que est a sendo adot ada par a a conver são de alt it udes é
a modelagem local do geóide baseada na medição de alt it udes GPS sobre
Ref erencias de Níveis de alt it ude ort omét ricas conhecidas. As dif erenças
encont r adas f or necem por int er polação as alt ur as geoidais em qualquer
pont o da r egião consider ada.
A pr ecisão de 1 a 2 ppm t ípica das r edes GPS, ger alment e super a a
precisão das redes geodésicas de primeira ordem exist ent es (10 ppm)
det erminadas pelos mét odos t radicionais de t riangulação, t rilat eração e
Figur a 4– alt it ude geomét rica x alt it ude ort omét rica
2. 5. 4 Alt imet ria x GPS
Há uma expect at iva de usar o sist ema GPS para det erminar a alt it ude
ort omét rica, evit ando assim a onerosa operação do nivelament o geomét rico.
Ao nível de pr ecisão que normalment e se requer a alt imet ria, ist o não pode
ser f eit o com o código C/ A. Ser ia possível usar o código P e com cer t eza a
f ase de bat iment o da port adora.
Par a Blit zkow 1998 por meio das obser vações GPS no mét odo
dif er encial obt ém-se as coordenadas cart esianas X, Y e Z de um pont o
desconhecido em f unção das dif erenças de coordenadas f ornecidas pelo GPS
e das coordenadas supost ament e conhecidas do pont o de part ida. A relação
ent re as coordenadas cart esianas e as geodésicas é:
Y = ( N = h ) cosϕ sen λ
Z = [ N ( 1 – e2 ) + h ] senϕ
A par t ir das quais o t er mo geodésico (ϕϕ , λλ , h ) é obt ido em f unção
de ( X, Y, Z ). A longit ude é der ivada dir et ament e enquant o a lat it ude e a
alt it ude geomét rica são calculadas por um processo int er at ivo. A gr andeza
alt imét rica que compõe o t ermo geodésico é a alt ura geomét rica h. Est a se
relaciona com a alt it ude ort omét ricas H de maneira aproximada, por meio da
alt ur a geoidal N:
h ≅≅ N + H
A apr oximação é devida ao f at o das t r ês gr andezas não serem
colinear es. Assim, a det er minação de H ut ilizando o GPS implica no
conheciment o da alt ura geoidal.
Cont ribuem at ualment e para a det erminação das alt uras
geoidais os modelos do geopot encial, os levant ament os gravimét ricos e as
observações sobre os sat élit es ar t if iciais quando conduzidas sobr e a r ede
de nivelament o. No primeiro segundo, as anomalias da gravidade são
ut ilizadas na int egral modif icada de St ones para obt er a component e de
cur t o compr iment o de onda da alt ur a geoidal. Finalment e obser vações aos
sat élit es art if iciais, sej am com ant igo sist ema TRANSI T ou at ualment e com
o GPS, sobre a rede de nivelament o, permit em o uso de h ≅≅ N + H par a
det erminar N, uma vez que H é conhecido do nivelament o.
Est udos r ealizados, pela Fundação I BGE e Univer sidade de São Paulo
ao longo dos últ imos anos t eve como result ado uma melhoria signif icat iva na
car t a geoidal no Br asil. Levant ament os gr avimét r icos t ambém t êm sido
vazias. Est es dados result aram em um novo modelo geopot encial, EGM9696,
cuj o erro absolut o dest a cart a é inf erior a 2 m e o relat ivo de 2 cm/ km ou
20 ppm.
Ainda segundo Blit zkow 1998, o sist ema GPS sempr e t r abalha no modo
dif er encial quando as pr ecisões exigidas são alt as. Se na est ação de
r ef er encia do GPS a alt ur a geoidal f or conhecida de alguma f or ma e a
est ação a det erminar não est iver muit o dist ant e, ou sej a, poucas dezenas de
quilômet ros, o uso da dif erença de alt ura geoidal ent re os dois pont os pode
of erecer uma maior conf iança na det er minação da alt it ude or t omét r ica com
o sist ema GPS. Assim, sej am os pont os 1 e 2 com as respect ivas coordenadas
geodésicas, alt ur a geoidal e alt it ude or t omét r ica:
Pont o 1: ϕϕ1, λλ1, h1, N1, H1
Pont o 2 : ϕϕ2 , λλ2 , h2, N2, H2
Consider e-se a dif erença de alt it ude geomét r ica ent r e os dois pont os:
h2 – h1 = dh ou H2+ N2 – H1 – N1 = dh
H2 = H1 - N2 + N1 – dh ou ainda
H2 = H1 + ( N2 - N1 ) – dh
Finalment e : H2 = H1 + dN + dh
Admit indo que o pont o 1 sej a int eirament e conhecido, obt em-se a
alt it ude or t omét r ica de 2 em f unção da dif er ença de alt ur a geoidal e da
dif erença de alt it ude geomét rica ent re os dois pont os. A vant agem é que a
car t a geoidal necessit a de uma pr ecisão r elat iva e não absolut a compat ível
3. 1 Mat erial
3. 1. 1 Localização da Área de Est udo
A ár ea de est udo est a sit uada no Campus “Luiz de Queir oz”-USP no
município de Pir acicaba Est ado de São Paulo, na Ár ea Exper iment al do
Depart ament o de Engenharia Rural, Fazenda Ar eão, sob o pivô cent r al, nas
coor denadas geogr áf icas de 22º42’40,17062” de lat it ude sul,
47º37´ 46,70154” de longit ude oest e e alt it ude media de 547,467 m,
adot ado como dat um o WGS 84, conf orme det alhes da f igura 5.
Possui a mesma área de aproximadament e 90.000,00 m2, com
declividades var iáveis, cont endo cult ur as de caf é e past agens, divididas em
vár ios “t alhões”.
O marco de monit orament o onde f oi inst alado a base dos recept ores
GPS geodésico est a sit uada na laj e do labor at ór io de Hidr áulica do
Depar t ament o de Engenhar ia Rur al da ESALQ - USP, cuj as coordenadas
geogr áf icas de 22o42' 40,52591" S de lat it ude e 47o37' 48,08741" W de
Figur a 5– Pivô Cent r al – Fazenda Ar eão – USP –Pir acicaba - S.P.
3. 1. 2 Equipament os ut ilizados
3. 1. 2. 1 Est ação Tot al marca SOKKI A, modelo SET 3 E
Equipament o af erido com leit ura de dist ância de at é 1500 m com um
prisma e 4500 m com t rês prismas, com precisão de 0,5 mm ± 5 ppm, leit ur a
13.133 da ABNT, como de alt a pr ecisão e t endo como acessór ios, t r ipé, dois
bast ões com um prisma cada um, colet or de dados marca SOKKI A, modelo
SDR 31, com capacidade de armazenament o de at é 5000 pont os,(f igur a 6).
O uso do colet or além de propiciar maior rendiment o, t em como
pr incipal vant agem à r apidez e conf iabilidade da t r ansf er ência de dados
para o comput ador, dando assim maior conf iabilidade e precisão no
levant ament o, pois evit a-se assim os erros de digit ação ou de marcação
er r ada nas planilhas de campo.
Figur a 6- Est ação t ot al mar ca SOKKI A modelo SET 3E
3. 1. 2. 2 Base modelo GTRA, marca Tech Geo.
Como est ação base f oi ut ilizado o equipament o GTRA, (f igur a 7)
GPS de 12 canais embut ido j unt o à ant ena, com 4 Mb de memória, com
capacidade de ar mazenament o de at é 200.000 pont os.
Figur a 7– GPS geodésico - Base GTRA – Tech Geo
Foram conf iguradas para colet a de dados, épocas a cada 2 segundos,
ângulo de cort e 10o e const elação mínima de 5 sat élit es, ut ilizando o
sof t war e Út il do Ezsurv, que permit e f azer o gerenciament o da est ação
base, bem como a criação e armazenament o dos arquivos com as inf ormações
recebidas dos sat élit es ref erent es a períodos de uma hora, para post erior
processament o dos dados. É um equipament o indispensável quando se ut iliza
a t écnica de processament o DGPS.
3. 1. 2. 3 Recept or GPS modelo GTR1
Fabricado pela Tech Geo, com precisão est át ica de 0,5 cm ± 10 ppm e
de memória, bat eria int erna para 12 h de operação, Ant ena geodésica L1,
supor t e de bast ão par a ant ena e pr isma; 12 canais par alelos par a sint onia de
at é 12 sat élit es simult aneament e; r ecepção e gr avação do código C/ A e
por t ador a L1; memór ia int er na de 4MB; pr ecisão dif er encial de 0,5cm + 1ppm
no modo est át ico para dist âncias de at é 20 km; precisão dif er encial de
1,0cm + 2ppm no modo cinemát ico, STOP&GO, e que opera com o sof t war e
Ezsur v. Com est e equipament o é possível realizar levant ament os dos t ipos:
est át ico, est át ico rápido e cinemát ico. Tem uma precisão em nível de
decímet ros, quando ut ilizado o mét odo medição dif erencial (DGPS)
pós-processado e em boas condições de campo (f igura 8).
Foi conf igurado para operar com épocas de 2 segundos, com t empo
est át ico de 15 segundos por pont o, const elação mínima de 5 sat élit es, ângulo
de cort e de 10o, ut ilizando o sof t war e Út il do Ezsur v.
3. 1. 2. 4 Recept or GPS Garmin modelo Et rex, de navegação.
Recept or GPS de navegação, (f igur a 9) pr ont o par a dif er encial, com
ant ena embut ida e12 canais em paralelo, t empo de aquisição de
aproximadament e 15 segundos em warm st art e cold st art e
aproximadament e 5 minut os para o “aut olocat e”. Sua precisão 1 a 15 met ros
despendendo das condições de execução do t rabalho. Possui int erf aces
NMEA 0183, RTCM 104 e RS-232 par a int er f ace com PC e com capacidade
de armazenament o de 500 pont os,.
Figur a 9 - GPS de navegação marca Garmin – modelo Et rex
3. 1. 2. 5 Microcomput ador
Para o processament o e a analise dos dados levant ados no campo, f oi
RAM e HD de 40 GB, cont endo inst alados os pr ogr amas necessár ios par a o
desenvolviment o e processament o dos dados.
3. 1. 3. Programas comput acionais - Sof t wares
3. 1. 3. 1 Sist ema TOPOEVN
O TopoEVN Fácil ver são 5.0 f or Windows desenvolvido pela – EVN
Aut omação Topográf ica Lt da. é um sist ema para cálculos, desenhos e
proj et os t opográf icos. Possui planilha complet a e um módulo CAD pr ópr io,
em port uguês, específ ico para desenhos t opográf icos. Além de f errament as
par a per f il, seção, volumet r ia e visualização 3D. Possui módulo cader net a de
campo com inúmeros recursos e regist ro de várias poligonais
simult aneament e.O Processament o dos dados: desde um simples
levant ament o t aqueomét rico at é uma sof ist icada poligonação com
r eit er ações. Aj ust ament o das poligonais: t r adicional e MMQ. Moder no CAD,
em port uguês: específ ico para desenhos e proj et os para t opograf ia.
Fer r ament as do CAD: divisões e cálculos de ár eas, r ot eir os per imét r icos e
memor iais descr it ivo, manipulação de escala, proj et o de locação, legendas,
t abelas, cur va cir cular . Fer r ament as par a alt imet r ia como int er polação e
t r açado de cur vas de nível e volumet r ia. Modelo Digit al do Ter r eno,
def inição aut omat izada do MDT com linhas obr igat ór ias ou de quebr a. Cr ia
perf il, def ini e edit a seções e calcula volumes de cort e e at erro ent re elas.
I nt erf ace de dados e desenhos at ravés dos f ormat os DWG. Todos os
procediment os de cálculos são mencionados.