2ª Edição
Florianópolis, 2010
Ministério de Educação
Secretaria de Ensino a Distância Universidade Aberta do Brasil
Universidade Federal de Santa Catarina
Reitor: Alvaro Toubes PrataVice-Reitor: Carlos Alberto Justo da Silva
Secretário de Educação a Distância: Cícero Barbosa
Pró-Reitora de Ensino de Graduação: Yara Maria Rauh Müller Pró-Reitora de Pesquisa e Extensão: Débora Peres Menezes Pró-Reitor de Pós-Graduação: Maria Lúcia de Barros Camargo
Pró-Reitor de Desenvolvimento Humano e Social: Luiz Henrique Vieira Silva Pró-Reitor de Infra-Estrutura: João Batista Furtuoso
Pró-Reitor de Assuntos Estudantis: Cláudio José Amante Centro de Ciências da Educação: Wilson Schmidt
Centro de Ciências Físicas e Matemáticas: Tarciso Antônio Grandi Centro de Filosofia e Ciências Humanas: Roselane Neckel
Curso de Licenciatura em Matemática na
Modalidade à Distância
Coordenação de Curso: Neri Terezinha Both Carvalho Coordenação de Tutoria: Jane Crippa
Coordenação Pedagógica/CED: Roseli Zen Cerny
Coordenação de Ambientes Virtuais/CFM: Nereu Estanislau Burin
Comissão Editorial
Antônio Carlos Gardel Leitão Albertina Zatelli
Coordenação Geral: Andrea Lapa, Roseli Zen Cerny Núcleo de Formação: Nilza Godoy Gomes
Núcleo de Pesquisa e Avaliação: Claudia Regina Flores Núcleo de Criação e Desenvolvimento de Materiais Design Gráfico
Coordenação: Laura Martins Rodrigues, Thiago Rocha Oliveira
Projeto Gráfico Original: Diogo Henrique Ropelato, Marta Cristina Goulart Braga, Natal Anacleto Chicca Junior
Redesenho do Projeto Gráfico: Laura Martins Rodrigues, Thiago Rocha Oliveira
Diagramação: Gregório Bacelar Lameira, Laura Martins Rodrigues Ilustrações: Camila Piña Jafelice, Maximilian Vartuli, Jean Rissatti, Pricila Cristina da Silva
Capa: Maiara Ornellas Ariño Design Instrucional
Coordenação: Juliana Machado
Revisão do Design Instrucional: Carla Morschbacher Revisão Gramatical: Vera Bazzo
Copyright © 2010, Universidade Federal de Santa Catarina/CFM/CED/UFSC Nenhuma parte deste material poderá ser reproduzida, transmitida e gravada, por qualquer meio eletrônico, por fotocópia e outros, sem a prévia autorização, por escrito, da Coordenação Acadêmica do Curso de Licenciatura em Matemática na Modalidade à Distância.
Ficha Catalográfica
B574g Bezerra, Licio HernanesGeometria analítica / Licio Hernanes Bezerra, Ivan Pontual Costa e Silva. – 2. ed. – Florianópolis : UFSC/EAD/CED/CFM, 2010. 170p.
ISBN 978-85-99379-87-5
1. Geometria analítica. I. Silva, Ivan Pontual Costa e. II. Título. CDU 514.2
Apresentação ... 7
1. Plano Cartesiano ... 9
1.1 Introdução ... 11
1.2 Distância entre dois pontos ... 13
1.3 Circunferência ... 15
Resumo ... 18
Bibliografia comentada ... 18
2. Retas no Plano ... 19
2.1 Equações de Retas ... 21
2.2 Ângulo entre duas retas ... 25
2.3 Distância de ponto a reta ... 28
Resumo ... 34
Bibliografia comentada ... 35
3. Cônicas ... 37
3.1 Introdução ... 39
3.2 Parábola ... 42
3.3 Elipse ... 49
3.4 Hipérbole ... 52
3.5 Rotação de eixos ... 57
3.6 Observações finais ... 63
Resumo ... 66
Bibliografia comentada ... 66
4. Vetores ... 67
4.1 Espaço cartesiano ... 69
4.2 Vetores na geometria analítica ... 72
4.2.1 Vetores e a Física ... 72
4.2.2 Vetores e a Geometria Euclidiana ...74
4.2.3 Operações com vetores ... 78
4.2.4 Norma de um vetor ... 82
4.2.5 Produto interno ... 83
4.2.6 Dependência linear ... 84
4.2.7 Base ortonormal ... 86
Bibliografia comentada ... 98
5. Retas e Planos no espaço ... 99
5.1 Equação cartesiana do plano ...101
5.2 Equações paramétricas do plano ... 105
5.3 Equação da reta ... 108
5.4 Posições relativas de planos ...112
5.5 Posições relativas de reta e plano ...115
5.6 Posições relativas de duas retas ...117
5.7 Distâncias no espaço ... 125
5.7.1 Distância de ponto a plano ... 125
5.7.2 Distância de ponto a reta ... 128
5.7.3 Distância entre planos e de reta a plano ... 133
5.7.4 Distância de reta a reta ... 135
Bibliografia Comentada ... 138
6. Superfícies Quádricas ... 139
6.1 Revisão de matrizes ...141
6.2 Determinantes e sistemas lineares ... 150
6.3 Quádricas ...157
6.3.1 Quádricas centrais ... 159
6.3.2 Quádricas não–centrais ...166
Bibliografia ...169
Quando formulamos o curso de Licenciatura em Matemática, a disciplina de Geometria Analítica foi pensada de tal modo que contemplasse duas abordagens: a clássica, que se refere apenas a conceitos de Geometria Euclidiana; a vetorial, que utiliza o con-ceito de vetor, definido a partir da teoria moderna de conjuntos. Essas duas abordagens são necessárias à formação do professor de ensino médio e fundamental, que deve compreender tanto a construção concreta dos conceitos em Matemática (Geome-tria Analítica clássica) como a formulação totalmente abstrata de conceitos, usual em Matemática avançada. Assim, dividimos a disciplina em duas partes: Geometria Analítica Plana, que é abordada, classicamente, nos capítulos 1-3; a Geometria Analítica Espacial, na qual usamos vetores para interpretar os conceitos básicos da Geometria Euclidiana Espacial, que é apresentada nos capítulos 4-6.
Esperamos que o leitor faça todos os exercícios da primeira parte e que adquira, ao final, um condicionamento físico e mental, pois os exercícios são braçais e exigem muita atenção: um leve erro de cálculo e todo o trabalho é perdido. Gostaríamos, também, que o leitor, ao final do livro, compreenda a economia de trabalho que o conceito de vetor oferece no estudo de Geometria Analítica.
Existe uma lacuna, propositalmente deixada para o leitor preen-cher: como fazer Geometria Analítica Plana usando as técnicas vetoriais estudadas na Geometria Analítica Espacial? Uma dica é a seguinte: pense que toda Geometria Analítica Plana pode ser feita a partir da Espacial no plano z=0.
Finalmente, introduzimos matrizes e determinantes no capítulo 6, para a formulação das equações quadráticas em três variáveis. O conceito de matriz é definido a partir do conceito de função - uma forma diferente de se apresentar uma matriz. Na verdade, o conjunto das matrizes reais, de ordem m n× , que comumente
é introduzido como m n× em Álgebra Linear, é visto aqui como
o conjunto das funções de
{
1,...,m} {
× 1,...,n}
em . Parece umaintrodu-juntos.
Plano Cartesiano
Este capítulo é introdutório, uma vez que é uma prepara-ção e um prenúncio do que virá em seguida. De forma sis-temática, entretanto, vamos listar alguns dos objetivos al-mejados pelos autores: apresentar o plano cartesiano - uma representação gráfica do produto cartesiano 2 = ×
; introduzir a métrica usual, isto é, como usualmente me-dimos a distância entre dois pontos no plano cartesiano; introduzir a noção de lugar geométrico - um conjunto de pontos que satisfazem uma propriedade geométrica; uti-lizar a dedução da fórmula de equação de circunferência como um modo de traduzir algebricamente uma proprie-dade geométrica, de tal modo que o lugar geométrico defi-nido pela propriedade seja identificado com essa tradução algébrica. Esperamos que os leitores reflitam, ao final do capítulo, sobre o seu conteúdo e comparem-no com os ob-jetivos listados.
1.1 Introdução
O plano cartesiano é um conceito introduzido no século XVII, inde-pendentemente, pelos matemáticos franceses René Descartes e Pier-re de Fermat para Pier-repPier-resentar graficamente paPier-res ordenados ( , )x y
de números reais.
Basicamente, identifica-se cada ponto de um plano com suas coorde-nadas em relação a um sistema que consiste de duas retas orientadas – uma horizontal, outra vertical. O ponto de interseção (em ângulo reto) desses dois eixos é dito a origem do sistema. O eixo horizontal é denominado eixo das abcissas e o eixo vertical, eixo das ordena-das. O plano cartesiano fica, assim, dividido em quatro regiões, que são denominadas quadrantes: o primeiro fica acima do eixo das ab-cissas e à direita do eixo das ordenadas; o segundo, acima do eixo das abcissas e à esquerda do eixo das ordenadas; o terceiro, abaixo
do eixo das abcissas e à esquerda do eixo das ordenadas; e, o quarto, abaixo do eixo das abcissas e à direita do eixo das ordenadas. A cada ponto do plano corresponde, então, um par de coordenadas ( , )x y ,
em que | |x é a distância do ponto ao eixo das ordenadas e |y|,
a distância do ponto ao eixo das abcissas. O sinal de x e o sinal de y dependem do quadrante em que o ponto está situado. A origem
do plano cartesiano, denotada por O, tem, assim, ambas as
coorde-nadas nulas.
y
x
0
4º quadrante (+,−) 1º quadrante
(+,+) 2º quadrante
(−,+)
3º quadrante (−,−)
Figura 1.1
Quadrante Abcissa Ordenada
1º quadrante + +
2º quadrante — +
3º quadrante — —
4º quadrante + —
Tabela 1.1
O plano cartesiano é um modelo da geometria euclidiana plana. Ou seja, uma vez definidos um sistema de eixos cartesianos (perpendi-culares entre si e com uma unidade de medida comum a ambos os eixos) e interpretados os conceitos primitivos da geometria euclidia-na nesse sistema, verifica-se que nele os axiomas da geometria são válidos e, por conseguinte, os teoremas também o serão.
A geometria euclidiana interpretada no plano cartesiano é dita geome-tria analítica plana. Chamamos também o plano cartesiano de plano numérico, pois associamos cada ponto do plano a um par ordenado de números reais ( , )x y : x, a abscissa e y, a ordenada do ponto, ditas
coordenadas cartesianas do ponto. De agora em diante, escreveremos
( , )
Exercício
Represente em um plano cartesiano os seguintes conjuntos de
1)
pontos:
{(0, 1), (0, 3), ( 2, 0), (1, 0), (3, 0)}− −
a) ;
{(1,2), (2,3), (3,4)}
b) ;
2
{( ,x x ) /x∈ − ≤ ≤, 2 x 3}
c) ;
{( , ) /x y x∈, y ∈ e x= y}
d) ;
{( , ) / = }x y x y
e) ;
{( , ) / x y x > }y
f) ;
{( , ) / x y x>1 e y<2}
g) ;
{( , ) / x y x>1 ou y<2}
h) ;
{( , ) / x y x> ⇒ <1 y 2}
i) ;
{( , ) / x y x> ⇔ <1 y 2}
j) .
1.2 Distância entre dois pontos
Dados dois pontos, A=( ,x y1 1) e B=( ,x y2 2), a distância entre eles é
dada por
2 2
2 1 2 1
( , ) ( ) ( )
d A B = x −x + y −y
que é o comprimento da hipotenusa do triângulo retângulo com ca-tetos de comprimentos iguais a |x2−x1| e |y2−y1|, respectivamente.
B
A C
y2
y1
x2 x1
Ponto médio de um segmento
Considere a figura abaixo, na qual M é o ponto médio do segmento AB. Observe que, por semelhança de triângulos, as coordenadas
de M são 1 2 1 2
,
2 2
x +x y +y
.
B
A
M y1
y2
x1 x2
y
x C
Figura 1.3
Exercícios
Ache o comprimento e o ponto médio dos segmentos, cujos
2)
extremos são dados pelos pontos abaixo:
a) (1, 2) e (2,4);
b) (1, 0) e (0,1);
c) (1,1) e (3,1);
d) ( 1, 0) e ( 2, 3)− − ;
e) ( 1, 1) e ( 2, 4)− − − − .
Divida os segmentos
3) AB abaixo, em n (indicado em cada item)
partes iguais e calcule as coordenadas dos pontos resultantes.
a) A=(1, 0), B=(5, 0), n=4;
b) A=(0, 0), B=(10,10), n=8 ;
c) A=(0, 0), B=(2, 3), n=3 ;
d) A=(1,1), B=(3, 4), n=3;
e) A=(1,1), B=(3, 4), n=4;
f) A=(1,1), B=(5, 9), n=8;
g) A= − −( 5, 6), B= −( 1, 2), n=8;
h) A=(2, 4), B=(6,12), n=8;
i) A = (1, 2), B = (2,1), n = 4;
j) A = (3, 5), B = (4, 4), n = 4.
Sejam
4) A=( ,x y1 1) e B=( ,x y2 2). Mostre que um ponto P=( , )x y
pertence ao segmento AB se, e somente se, existe t∈[0,1] tal
que
1 2 1 2
(1 )
. (1 )
x t x t x
y t y t y
= − +
= − +
1.3 Circunferência
Podemos definir uma circunferência, de raio r e centro em C, como
sendo o lugar geométrico dos pontos P tais que d P C( , )=r.
Se C=( ,x y0 0), então essa circunferência é o conjunto dos pontos
( , )
P= x y tais que 2 2
0 0
(x−x ) +(y−y ) =r, ou seja,
2 2 2
0 0
(x−x ) +(y−y ) =r .
Essa equação é chamada de equação da circunferência de raio r
e centro em ( ,x y0 0). Por exemplo, a equação
2 2
(x−3) +(y+4) =36
é uma equação da circunferência de raio 6 e centro em (3, 4)− . Eu
disse uma equação e não a equação porque, depois de alguns cálcu-los, a equação acima se torna 2 2
6 8 11 0
x +y − x+ y− = , e esta é outra
equação que descreve a mesma circunferência.
A palavra equação quer dizer igualdade. As igualdades,
2 2
(x−3) +(y+4) =36 e x2+y2−6x+8y− =11 0 são obviamente
di-ferentes, mas elas são equivalentes, no sentido que os pares de nú-meros, x e y, que tornam a primeira equação verdadeira fazem com
que a segunda equação também seja verdadeira, e reciprocamente.
Por exemplo, 2 2
(3 3)− + +(2 4) =36, ou seja, a primeira equação é
verdadeira quando x=3 e y=2; substituindo-se esses valores na
segunda equação, ela fica 2 2
3 +2 − +18 16 11 0− = , que também, é
verdadeira. Agora, se eu tomar algum outro valor para x e algum
outro valor para y que tornem a segunda equação verdadeira, esses
valores também, tornarão a primeira equação verdadeira (experi-mente fazer isso com alguns pares de números !).
Assim, tanto uma como a outra são equações da mesma circunfe-rência. Vamos ver se você sabe passar de uma para outra.
Exercícios
Escreva as equações abaixo na forma
5) 2 2 2
(x−a) +(y b− ) =r .
a) 2 2
2 6 15; x +y − x+ y=
b) 2 2
4 6 23;
x +y − x− y=
c) 2 2
6 0; x +y + y=
d) 2 2
15, 5 0; x +y − + −x y =
e) 2 2
8, 5 0; x +y − − −x y =
f) 2 2
2x +2y −4x+6y=12.
Esboce no plano cartesiano as circunferências do exercício
6)
anterior.
Calcule a distância entre os dois pontos dados em cada item
7)
abaixo.
(3, 0), ( 2, 0)
P= Q= −
a) ;
(0, 10), (0, 2)
P= Q= −
b) ;
(3, 0), (0, 4)
P= Q=
c) ;
(1,1), ( 1, 1)
P= Q= − −
d) ;
(0, 0), (5, 12)
P= Q=
e) ;
(1, 1), (9, 16)
P= Q=
f) ;
( 1, 1), (23, 6)
P= − − Q=
g) ;
(0,1), (40,10)
P= Q=
h) ;
(1, 2), (13, 33)
P= − Q=
i) ;
(10,11), (150, 40)
P= Q= −
Ache uma equação da circunferência em cada item abaixo.
8)
com centro em
a) (1, 2)− e raioraio = 3;
com centro em
b) (0, 2) e que passa por ( 1,1)− ;
tal que
c) (1, 2)− e (3, 4) sejam diametralmente opostos;
que passa por
d) (0, 0), (2, 2) e ( 1, 3)− − ;
situada no primeiro quadrante, tangente aos eixos
coorde-e)
nados e de raioraio = 2;
tangente às retas
f) x= −1 e x=1, e que passa por (0, 0);
situada no 1º quadrante, tangente às retas
g) y=3 e y=0, e
que passa por ( 1, 2)− ;
inscrita no triângulo
h) ABC, em que A=(0, 0), B=(4, 0) e
(2 3, 2)
C= ;
circunscrita ao triângulo
i) ABC, em que A=(0, 0), B=(4, 0)
e C=(2 3, 2).
Ache o centro e o comprimento do raio das seguintes
circun-9)
ferências.
2 2
2 x +y = +x
a) ;
2 2
2 1
x +y = x−
b) ;
2 2
( 2) 2
x + y− = x
c) ;
2 2
4 x +y = + +x y
d) ;
y x y
x2 + 2 =2 +2
e) ;
y x y
x 2 2 2
2 2 + 2 = +
f) .
Ache a interseção das circunferências abaixo (ou seja,
en-10)
contre o conjunto de pontos correspondentes à interseção das figuras).
a) x2 +y2 =1 e x2+(y−1)2 =1;
b) x2 +y2 =1 e x2 +y2 =x+2;
c) x2 +y2 =1 e x2 +y2 =x+y;
Sejam
11) A=(1,1), B= − −( 1, 1). Em cada item abaixo, ache as
co-ordenadas do(s) ponto(s) C de maneira que o(s) triângulo(s) ABC satisfaça(m) as condições dadas.
a) ABC é eqüilátero.
b) AB é a hipotenusa e AC é um cateto de comprimento 2.
c) ABC é isósceles e a altura em relação à base AB é 2.
Resumo
coordenadas de um ponto; •
distância entre dois pontos; •
ponto médio de um segmento; •
equação da circunferência; •
interseção de circunferências. •
Bibliografia comentada
IEZZI, G. Fundamentos de matemática elementar. 4. ed. São Paulo: Atual, 1993. v. 7.
Retas no Plano
A intenção deste capítulo é aprofundar os objetivos lista-dos no capítulo anterior. Gostaríamos que os leitores se fa-miliarizassem com o plano cartesiano e compreendessem ainda mais o que é um lugar geométrico. Neste capítulo, apresentamos uma forma bem costumeira de como a Ma-temática é construída: a classificação. As retas compreen-dem uma classe de lugares geométricos - aqueles que são traduzidos por uma equação (igualdade) de primeiro grau, envolvendo as coordenadas de seus pontos.
2.1 Equações de Retas
Vimos, anteriormente, que um ponto é interpretado no plano carte-siano como sendo um par ordenado de números. Vamos ver, agora, que a reta vai ser interpretada como um conjunto de pares orde-nados que satisfazem uma equação linear do tipo ax by+ =c, com
0 ≠
a ou b≠0. Observemos que o conjunto dos pares ( , )x y que
sa-tisfazem ax by+ =c é igual ao conjunto dos pares que satisfazem kax+kby=kc, k ≠0, pois essas equações são equivalentes entre si.
Uma vez interpretada a reta como um conjunto de pontos que satisfazem ax by+ =c, em que a b c, , são números reais fixos e
2 2
0
a +b ≠ (o que é equivalente a a≠0 ou b≠0), será que o
axio-ma de geometria euclidiana “por dois pontos distintos passa uaxio-ma única reta” é válido? No caso, deve-se verificar se a proposição “dados dois pares ordenados distintos, existe um único conjun-to de pares ordenados que satisfazem uma equação ax by+ =c,
2 2
0
a +b ≠ , que contém os dois pares” é verdadeira no plano
carte-siano, que é o que faremos a seguir.
Proposição 2.1.Se P=( ,x y1 1) e Q=( ,x y2 2) são distintos então
exis-tem a, b e c, com 2 2
0
Além disso, se existem outros a′,b′,c′, com 2 2
( ')a +( ')b ≠0, tais que c
y b x
a′ 1 + ′ 1 = ′ e a′x2 +b′y2 =c′, então existe um número k tal que ' .
a =k a, b'=k b. , c′ =k c. .
Demonstração:
Observe que (y2−y x1) −(x2−x y1) =(y2−y x1) 1−(x2−x y1) 1 é uma
equação do tipo procurado, pois é da forma ax by+ =c e a equação
é satisfeita pelos pontos P e Q.
Vamos mostrar, agora, a segunda parte da proposição.
Vamos supor, então, que ax1+by1=c e ax2+by2 =c, e que
c y b x
a′ 1+ ′ 1 = ′ e a′x2 +b′y2 =c′.
Temos, então, que a x( 2−x1)+b y( 2−y1)=0 e
2 1 2 1
( ) ( ) 0
a x′ −x +b y′ −y = . (*)
Se x1 = x2, então, y1 ≠ y2, pois P e Q são distintos. Obtemos, nesse
caso, que b=b′=0. Logo, tanto a como a′ são não nulos. Assim,
a c a c x x ′ ′ = = = 2 1 .
Logo, k
c c a
a′ = ′ =
. E, como b=b′=0, b'= ⋅k b.
Se y1 = y2, por raciocínio análogo, chegamos ao mesmo resultado.
Vamos supor, agora, que x1 ≠ x2 e y1 ≠ y2. Por (*), temos que
a a b a x x y y − = ′ ′ − = − − 1 2 1 2 .
Logo, k
b b a a = ′ = ′
. Por conseguinte,
1 1 1 1 1 1
( ) ( ) ( ) ' ' '.
k c⋅ = ⋅k ax +by = k a x⋅ + ⋅k b y =a x +b y =c
■
Definição 2.1. (Coeficiente angular de uma reta não vertical): o coeficiente angular m (ou a inclinação, ou a declividade) da reta que passa por dois pontos P=( ,x y1 1) e Q=( ,x y2 2), tais que x1 ≠ x2, é
2 1 2 1 y y m x x − = − .
Mais adiante, veremos que essa equação não foi tirada da cartola.
B
A y1
y2
x
1 x2
y2− y1
x
2− x1
y
x
Figura 2.1
Observe que esse número é a razão entre a variação de ordenadas e a variação de abcissas dos dois pontos. Ele corresponde à tangente do ângulo que a reta, determinada por esses dois pontos, faz com o eixo horizontal.
No caso das retas verticais, cujos pontos têm uma mesma abcissa, dizemos informalmente que elas têm declividade infinita. A equa-ção delas tem a forma x=x0, em que x0 é a abcissa comum a todos
os pontos da reta.
Agora, sejam dados dois pontos, P=( ,x y1 1) e Q=( ,x y2 2), em que
2 1 x
x ≠ . Seja r a reta que passa por eles. Observe que o que
chama-mos de reta é um conjunto de pontos que satisfaz uma equação line-ar em x e y, que é algo muito abstrato. Se esse conjunto realmente
representa uma reta como a que estamos acostumados em geome-tria euclidiana plana, um ponto ( , )x y , desse conjunto, ( , )x y ≠P, é
tal que a declividade da reta que passa por ( , )x y e P é a mesma que
a da reta P e Q. Traduzindo para a linguagem matemática,
( , )x y ∈r, ( , )x y ≠P ⇔
1 1
x x
y y
−
− 2 1
2 1
y y x x
− =
− ,
ou seja,
2 1
1 1
2 1
( )
y y
y y x x
x x −
− = −
− .
Essa equação é a que vamos chamar de equação reta-2 pontos, para chamar a nossa atenção sobre o que utilizamos para determinar uma equação de reta.
Observe que essa equação é da forma ax by+ =c.
Exemplo: Achar uma equação da reta que passa por (2,1) e (0, 3).
Resolução: Usando a fórmula acima, temos que 1 3 1( 2) 0 2 y− = − x−
− ,
ou seja, y=−x+3.
Note que, se 2 1
2 1
y y m
x x − =
− , então a equação reta-2 pontos pode ser
reescrita como y−y1=m x( −x1) que vamos chamar de equação
reta-declividade mais um ponto.
Exemplo: Achar uma equação da reta que tem declividade 2 e
pas-sa por (2, 3).
Resolução: Pela fórmula acima, então, temos que uma equação é
3 2( 2)
y− = x− , isto é, y=2x−1.
Conclusão: se a b, e c ∈ , ax by+ =c é equação de reta se e só
se a≠0 ou b≠0. Ou seja, a única coisa que não pode ocorrer é
ambos os coeficientes a e b serem nulos, pois assim a equação se
torna 0x+0y=c, que ou não tem solução (c≠0), ou todos os
pa-res ordenados são soluções (c=0), ou seja, o conjunto-solução é o
plano todo.
Temos então um outro modo de achar equação de reta, dados dois pontos: eu substituo as coordenadas de cada ponto na equação da forma ax by+ =c, obtendo assim um sistema de duas equações, cujas
incógnitas são a b, e c.
Exemplo: Achar equação da reta que passa por (0,1) e (2, 3).
Resolução: Substituindo os dois pontos em ax by+ =c, obtenho
0 1
2 3
a b c
a b c
⋅ + ⋅ =
⋅ + ⋅ =
que é equivalente ao sistema
2 3
b c
a b c
=
⋅ + ⋅ =
, ou seja,
− = =
c a
c b
.
Atribuindo um valor qualquer a c, diferente de zero (pois a e b não
Exercício
Achar equação para a reta
1)
que passa por
a) (1, 2) e (2,1);
que passa por
b) (1,1) e (2, 2);
que passa por
c) (0,1) e (0,5);
que passa por
d) (2, 0) e (0, 0);
que tem declividade
e) ( 2)− e passa por (0, 0);
que tem declividade
f) 3 e passa por (1,1).
2.2 Ângulo entre duas retas
Duas retas distintas no plano podem ser ou concorrentes ou para-lelas. Retas paralelas são aquelas que têm mesma declividade. Por exemplo, as retas r x: =1 e s x: = −3 são paralelas; assim como as
retas q y: =2x+1 e t y: =2x−3. O caso de retas coincidentes é
con-siderado em alguns livros como um caso particular de retas para-lelas. Notemos que duas equações de reta representam a mesma reta se e só se os coeficientes a b, e c de uma são múltiplos dos
coe-ficientes respectivos da reta. Concluímos, então, que duas retas são concorrentes se e somente se suas declividades são distintas uma da outra.
Exercícios
Sejam
2) ax by+ =d e cx+dy= f, equações das retas r e s,
res-pectivamente. Quais as condições que a b c d, , , devem
satisfa-zer para que as retas sejam concorrentes?
Verifique se cada par de equações seguinte corresponde a um
3)
par de retas paralelas ou de retas coincidentes ou de retas con-correntes. Nestes casos, ache o ponto de interseção.
a)
= +
= +
3 6 4
1 3 2
y x
y x
; b)
= = +
3 6
1 3 2
y y x
c) = + = + 3 2 4 1 3 2 y x y
x ; d)
= = 3 6 1 2 y x ; e) = + = + 2 6 4 1 3 2 y x y x .
Um caso particular e interessante de retas concorrentes é quando elas são perpendiculares entre si. Note que o problema se resume às declividades das retas envolvidas. Excluindo o caso de pares de retas em que uma é vertical e a outra é horizontal, pares de retas do
tipo 1 1
2 2
y m x b y m x b
= +
= +
, com m m1⋅ 2 ≠0, são perpendiculares se os
ângu-los 11e e2 (0 < 1< 2< 180 )
, que as retas fazem respectivamente
com o eixo horizontal, forem tais que 2− =1 90
.
Os coeficientes angulares (a terminologia que se adapta melhor a esse caso) das retas são m1=tan( )1 e m2 =tan(2).
Por relações trigonométricas, concluímos então que
2 2 1
1 1
1 1
tan( ) tan( 90 )
tan( ) m m = = + = − = − .
Mostramos, deste modo, o seguinte resultado:
1 1 ( 1 0) e 2 2 ( 2 0)
y=m x b+ m ≠ y=m x b+ m ≠
2 1
1 são perpendiculares m
m
⇔ = − .
Raciocínio análogo poderia ser aplicado para calcular a tangente do ângulo entre duas retas concorrentes quaisquer, r e s, não
per-pendiculares entre si. Vejamos os casos:
• r x: =x0 (vertical) e :s y=mx b m+ , ≠0
Há dois subcasos, que estão ilustrados pela figura 2.2. Verifi-que Verifi-que, em ambos os subcasos:
1
1 1
tan ( ) .
tan m
= =
y r
s
θ θ = 90°− θ1
tg θ1= m
θ1 x x0 y r s θ θ1 θ = θ1 − 90°
tg θ1= m
x x0 θ1 A B Figura 2.2
• r y: =m1x b+ 1 e :s y=m x b2 + 2, m m1⋅ 2 ≠ −( 1)
Verifique, de modo análogo ao caso anterior, que
1 2 1 2
tan ( ) .
1 m m m m − = +
Exercício
Calcule o ângulo entre as retas abaixo.
4) a) = = + 3 1 2 2 y y x
; b) (2 3) 1
3 y x y x = − + + = + ;
c) 1
( 3 2) y x y x = − = +
; d)
( 5 1) 2 1
( 5 1) 2 0
2.3 Distância de ponto a reta
Vamos considerar o problema de calcular a distância de um pon-to P=( ,x y0 0) a uma reta, que não é nem vertical nem horizontal,
:
r y=mx b+ . Vamos supor, obviamente, que P não pertence à reta.
Quando falamos a distância do ponto à reta, queremos dizer com isso a menor distância, que corresponde ao comprimento do seg-mento que vai do ponto P à reta, perpendicularmente.
Uma solução seria encontrarmos a reta s, que passa por P e é
per-pendicular a r; depois, acharmos o ponto Q de interseção das duas
retas e, então, calcularmos a distância de P a Q.
Exemplo: Calcule a distância do ponto (1, 0) à reta r y: =2x+3.
Resolução: A reta : 0 1( 1) 2
s y− = − x− é a reta perpendicular a r
que passa por (1, 0). Resolvendo o sistema + − = + = 2 1 2 1 3 2 x y x y temos que
o ponto Q= −( 1,1) é a interseção das duas retas. Logo, a distância
pedida é dd( , )P Q = 5.
Outra solução, que é uma versão resumida da primeira, seria achar o ponto Q da reta r tal que a declividade de P a Q é a de uma
reta perpendicular a r. Ou seja, o ponto Q=( ,x y1 1) é a solução do
sistema
0 0
1 y mx b
y y
x x m
= + − = − − .
A solução é 0 0
1 2 1 ,
x m y m b x
m
+ ⋅ + ⋅ =
+ y1=mx1+b.
A distância de P a Q é, então, igual a (x1−x0)2+(y1−y0)2, ou
seja, 0 0 2 | | ( , ) 1 b y m x d P Q
m
− + ⋅
=
Exercícios
Calcule a distância do ponto
5) P à reta r, em cada item abaixo.
(1, 5), : 2 P= − r x= −
a) ;
b) P= − −( 1, 5), :r y=2 ;
c) P=(1,1), :r y= −2 x;
d) P=(0, 0), :r y= − +2x 3;
e) P=(0,1), :r y=2x+3;
f) P=(3,1), :r y=x.
Calcule a área dos triângulos
6) ABC, dados abaixo, calculando a
altura pela fórmula de distância de ponto a reta.
(1, 0), = (0, 0), (0, -2)
A= B C=
a) ;
(1,1), (1, 3), (2, 5)
A= B= C=
b) ;
(0,1), (0, 4), (1,1)
A= B= C=
c) ;
(1,1), =(3, 0), (4, 3)
A= B C=
d) ;
e) A=(0, 2),B=(2, 0), C=(1, 4);
(0, 0), ( 1,1), (1,1)
A= B= − C=
f) .
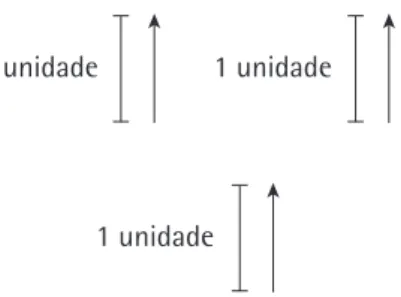
Observação avançada (no sentido de avançarmos até a unidade seguinte a essa – Álgebra Vetorial):
A área de um triângulo podeser calculada via álgebra vetorial, sub-mergindo três pontos do plano cartesiano nos três pontos correspon-dentes a eles no plano z=0. Por exemplo, os pontos A= (1,1),(1,1),, BB==(2, 3) e ==
e
, 3) e C (3, 4)
= = corresponderiam a A'=(1,1, 0), 'B =(2, 3, 0) e 'C =(3, 4, 0).
Esses pontos dão origem aos vetores a=(2 1)− i+ −(3 1)j e (3 1) (4 1)
b= − i+ − j, em que i, j e k são vetores unitários na
di-reção dos 3 eixos ortogonais do espaço cartesiano (observe que as coordenadas do vetor a são as diferenças das coordenadas
respec-tivas de A' e B'; as de b, as diferenças das de A' e C'). No espaço
ordena-dos, ( ,x y z1 1, )1 e ( ,x y z2 2, 2), em um terceiro trio ordenado,
chama-do de produto vetorial, cujas coordenadas são
1 2 2 1 1 2 2 1 1 2 2 1
( .y z −y z. , −( .x z −x z. ), x y. −x y. ).
O cálculo dessas coordenadas segue a seguinte regra prática:
=
2 2 2
1 1 1
z y x
z y x
k j
i
1 2 2 1 1 2 2 1 1 2 2 1
( .y z −y z i. )−( .x z −x z j. )+( .x y −x y k. ).
No caso acima, aplicando-se a regra, vê-se que a × b, o produto
vetorial de a por b (nessa ordem), é o vetor c= −k. Mostra-se, por
outro lado, que a norma desse vetor (ou do trio ordenado formado pelas coordenadas do vetor) é duas vezes a área do triângulo for-mado pela origem e os dois pontos cujas coordenadas são os trios ordenados dados pelas coordenadas de a e b. Ou, no nosso caso,
do triângulo A B C' ' '. Note que as coordenadas de a e b
corres-pondem a dois pontos, P e Q, e que o triângulo de vértices OPQ
é congruente ao triângulo A B C' ' ', como se A' fosse trazido para
a origem, B' a P (ponto cujas coordenadas são as diferenças das
de A'e 'B ), e C' a Q (ponto cujas coordenadas são as diferenças
das de A'e 'C ).
Finalmente, a área do triângulo ABC, que é a área do triângulo ' ' '
A B C , é 1, que é a norma do trio (0, 0, 1)− , que são as
coordena-das do vetor 0.i+0.j−k.
O uso de álgebra vetorial em geometria analítica pode ser visto em [1], [8] e [9].
Exercícios
Achar uma equação de reta em cada item abaixo.
7)
que passa por
a) (0, 0) e (0, 2)− ;
que passa por
b) (1, 0) e (0, 2);
mediatriz do segmento
c) AB, em que A= −( 3, 0) e B=(1, 0);
mediatriz do segmento
d) AB, em que A=(1, 1) e B=(3, 1);
paralela à reta de equação
paralela à reta de equação
f) x=1 e que passa por (3, 2);
paralela à reta de equação
g) x+2y=1 e que passa por (1, 1);
paralela à reta de equação
h) x+2y=1, cuja distância a essa
reta é 2;
cuja declividade é
i) 3 e passa por ( 1, 1)− − ;
perpendicular à reta de equação
j) 2x+ =y 1 e que passa por
(1, 2);
mediatriz do segmento
k) AB, em que A=(1,1) e B=(3, 5);
bissetriz do (menor) ângulo formado entre a reta de
equa-l)
ção x+ =y 1 e a reta de equação x+2y=1 (lembrar que a
bissetriz é o lugar geométrico dos pontos no interior do ân-gulo que eqüidistam das retas dadas).
Calcular a distância pedida em cada item abaixo.
8)
entre o ponto
a) (0, 2) e a reta de equação x+ =y 1;
entre as retas
b) r x: + =y 1 e s x: + =y 2;
entre o ponto
c) (1, 2)− e a circunferência (x+1)2+y2 =1;
entre as circunferências
d) 2 2
(x+1) +y =1 e
2 2
(x−1) +(y−3) =1;
entre a reta
e) r x: =2 e a circunferência (x−1)2+(y−3)2 =1;
entre a reta
f) r x: + =y 1 e a circunferência (x+1)2+y2 =1.
Sejam
9) A=(1,1), B= − −( 1, 1). Em cada item abaixo, ache as
co-ordenadas do(s) ponto(s) C de maneira que o(s) triângulo(s) ABC satisfaça(m) as condições dadas.
a) AC é hipotenusa de comprimento 4;
b) BC é hipotenusa de comprimento 3;
c) ABC é isósceles e a altura em relação a AB é 3;
d) AB é hipotenusa e a altura do triângulo em relação a ela é 3;
e) A= 30ˆ e B= 60ˆ ;
f) A= 90ˆ
e B= 60ˆ ;
Comentamos no início do livro que a Geometria Analítica Plana é um modelo da Geometria Euclidiana Plana. Isto significa que a in-terpretação dos conceitos primitivos da Geometria Euclidiana Plana no Plano Cartesiano resulta na veracidade dos axiomas da teoria no modelo. Há cinco conceitos primitivos na Geometria Euclidiana Plana que são as bases para se definirem todos os outros termos geométricos da teoria. São eles: ponto, reta, relação de incidência, relação de vizinhança e relação de congruência.
A relação de incidência tem a ver com as expressões seguintes: “a reta r passa pelo ponto P”, “o ponto P pertence à reta r”, “o ponto P é
incidente com a reta r” “por dois pontos passa uma única reta”, etc.
A relação de vizinhança é simplesmente a relação dada pela expres-são “o ponto C está entre os pontos A e B”. Finalmente, a relação de
congruência é a que está contida nas expressões “os lados AB e AC
têm o mesmo tamanho”, “os ângulos de um triângulo eqüilátero são iguais”. Ou seja, é a relação que nos permite dizer que ângulos têm o mesmo número de graus ou que segmentos têm o mesmo tamanho (congruência de triângulos é um conceito definido). Mais informações sobre a axiomatização da Geometria Euclidiana Plana pode ser vista no excelente livro do Greenberg (ver bibliografia co-mentada).
Na Geometria Analítica Plana, pontos são interpretados como pares ordenados; retas, como conjunto de pares ordenados que satisfazem uma equação linear em x e y; a relação de incidência é interpretada
como a relação de pertinência entre um par ordenado e um con-junto de pares ordenados; a relação de vizinhança é interpretada assim: C está entre A=( , ')a a e B=( , ')b b se e só se existe t,, 0< <t 1,,
tal que C = ((1−t a) + ’, (1ta −t b) + ’).tb Finalmente, a relação de
congruência: AB=CD se e só se d A B( , )=d C D( , ); = se e só se tan=tan, em que as tangentes são dadas pela fórmula do ângulo entre duas retas.
Seja
10) ABC um triângulo. Mostre que as mediatrizes dos
la-dos encontram-se em um ponto, que é dito o circuncentro do triângulo.
Demonstração: Seja ABC um triângulo qualquer. Escolha eixos
carte-sianos de tal modo que o eixo das ordenadas coincida com a mediatriz do lado AB e o eixo das abcissas contenha o lado AB. Assim, o
pon-to A tem coordenadas (−a, 0), o ponto B tem coordenadas ( , 0)a , 0
a> , e o ponto C tem coordenadas ( , )b c . Basta mostrar, então, que
a interseção das mediatrizes de AC e BC está sobre o eixo das
orde-nadas (uma vez que a mediatriz de AB é o eixo das ordenadas).
A
(−a , 0)
y
x C
B
(a , 0)
Figura 2.4
A mediatriz de AC, a reta r, contém o ponto médio de AC,
,
2 2
a b c+
, e é perpendicular à AC. Logo, a equação de r é
2 2
c a b a b
y x
c
− +
− = −
.
A mediatriz de BC, a reta s, contém o ponto médio de BC,
,
2 2
a b c − +
, e é perpendicular a BC. Logo, a equação de s é
2 2
c a b b a
y x
c
+ −
− = − −
.
A interseção dessas duas mediatrizes é o ponto cujas coordenadas são dadas pela solução do seguinte sistema:
2 2
2 2
c a b a b
y x
c
c a b b a
y x
c
− = − − +
+ −
− = − −
2 2
2 2
a b b a a b a b
x x
c c
c a b b a
y x
c
− + − − = − − +
+ −
− = − −
, isto é,
+ − = =
c c b a y x
2 0
2 2 2
.
Logo, o ponto está sobre o eixo das abcissas, como queríamos mostrar.
Seja
11) ABC um triângulo. Escolha um sistema de eixos
carte-sianos tal que A=( , 0)a , B=( , 0)b e C=(0, )c . Mostre que as
alturas dos lados encontram-se em um ponto, que é dito o or-tocentro do triângulo (sugestão: mostre que as alturas em rela-ção a AC e a BC encontram-se no eixo das ordenadas, que é o
suporte da altura em relação a AB).
Seja
12) ABC um triângulo. Escolha um sistema de eixos
carte-sianos tal que A= −( a, 0), B=( , 0)a e C =( , )b c . Mostre que as
medianas dos lados encontram-se em um ponto, que é dito o baricentro do triângulo (sugestão: mostre que as medianas de
AC e BC encontram-se sobre a mediana de AB).
Resumo
declividade de uma reta não vertical; •
equação da reta, dados dois pontos; •
equação da reta não vertical, dados um ponto e a declividade; •
retas paralelas; •
retas perpendiculares; •
distância de ponto a reta; •
distância entre duas retas paralelas; •
Bibliografia comentada
BARBOSA, J. L. M. Geometria euclidiana. 6. ed. Rio de Janeiro: SBM, 2004.
LIMA, E. L. de. Coordenadas no plano. 4. ed. Rio de Janeiro: SBM, 2002.
LIMA, E. L. de. Coordenadas no espaço. 3. ed. Rio de Janeiro: SBM, 1998.
Esses dois livros são complementares. O primeiro é mais próximo ao que apresentamos até aqui. São livros essenciais, no sentido que há muitos exercícios, alguns elementares, para que o leitor aprofunde seu conheci-mento geométrico no plano cartesiano. Recomendado.
GREENBERG, M. J. Euclidean & non-Euclidean geometry:
development and history. 3. ed. New York: W. H. Freeman, 1993.
Cônicas
Este capítulo apresenta outra classe de lugares geométricos – aqueles que são descritos por uma equação de segundo grau, envolvendo as coordenadas dos seus pontos. Ao longo do ca-pítulo, procuramos envolver o leitor em deduções algébricas – uma cadeia lógica de equações, cujos elos são operações algébricas, que são bem apresentadas através de produ-tos notáveis. Vemos aqui, também, dois movimenprodu-tos rígi-dos que fazemos com os eixos: translação e rotação. Essas mudanças de variáveis chamam a nossa atenção para o fato de que a descrição dos objetos geométricos no plano cartesiano depende bastante dos eixos de referência. Por outro lado, tanto a translação como a rotação preservam as classes de lugares geométricos descritos por equações polinomiais. Por exemplo, uma equação de segundo grau permanece de segundo grau depois da mudança de variá-veis dada por esses movimentos. O objetivo final deste ca-pítulo é a identificação da cônica a partir dos coeficientes dos termos de segundo grau de sua equação.
3.1 Introdução
Os geômetras gregos anteriores a Apolônio de Pérgamo necessita-vam de três tipos de cone para obterem seções cônicas pela interse-ção de um plano (sempre) perpendicular a uma geratriz qualquer de um cone circular reto. Notemos que os gregos, naquela época, imaginavam um cone circular reto como sendo gerado pela revolu-ção de duas retas em torno de um eixo de simetria (conforme figura 3.1). Se o ângulo , que as duas retas geratrizes formam entre si, for agudo, teremos uma elipse; se for reto, uma parábola; se for obtuso, uma hipérbole. A palavra elipse, na sua etimologia, significava que se alcançaria a outra geratriz quando uma das duas fosse intercepta-da pelo plano; a parábola, que o plano era paralelo à outra geratriz; a hipérbole, que o plano se afastaria cada vez mais da outra geratriz.
σ
Foi Apolônio quem mostrou que bastaria um cone circular reto de duas folhas qualquer para se obter as três (seções) cônicas; o que deveria va-riar era o ângulo de interseção do plano com uma das duas geratrizes. Na verdade, basta fazer a revolução de apenas uma reta (a geratriz) para gerar um cone de 2 folhas, conforme a definição seguinte.
Definição 3.1: Consideremos um cone de duas folhas, uma figura
que pode ser gerada pela revolução de uma reta g (geratriz) em
torno de outra reta e (eixo) que a corta segundo um ângulo em um ponto V (veja a figura 3.2). Chamamos de geratriz qualquer
reta do cone que passa por V. Consideremos agora o conjunto de
todos os planos que não passam por V. A curva que resulta da
in-terseção de um plano desse conjunto com o cone é dita uma seção cônica ou, simplesmente, uma cônica (veja a figura 3.4).
V
g θ
V
e
Figura 3.2
Note que a interseção de um plano, que passa por V, com o cone
pode resultar ou no ponto V, ou em uma reta (interseção do cone
com um plano tangente a ele) ou em duas retas (interseção do cone com um plano secante que contenha V ), que alguns autores
cha-mam de cônicas degeneradas (veja a figura 3.3).
(um ponto) (r1 e r2: um par de retas concorrentes)
r1 r2
V V
α
α
V
α
(r: uma reta)
r
A B C
Figura 3.3
Um conjunto de pontos que satisfaz uma propriedade geométrica é dito um lugar geométrico. O Teorema de Apolônio, enunciado abai-xo, afirma que uma cônica é um dos três lugares geométricos defi-nidos a seguir:
elipse
• – seja dado um número positivo 2a, sejam dados dois
pontos fixos F1 e F2 (ditos focos), cuja distância entre si, 2c, é
me-nor que 2a. O conjunto dos pontos P, tais que a soma das
dis-tâncias de P a F1 e de P a F2 é igual a 2a, é dito uma elipse. parábola
• – seja dada uma reta (diretriz) d, seja dado um ponto F (foco) fora da reta. O conjunto dos pontos, tais que a
distân-cia de cada ponto à diretriz é igual à distândistân-cia dele até o foco, é dito uma parábola.
hipérbole
• - seja dado um número positivo 2a, sejam dados
dois pontos fixos F1 e F2 (ditos focos), cuja distância entre si, 2 ,c
é maior que 2a. O conjunto dos pontos P, tais que a
diferen-ça das distâncias de P a F1 e de P a F2 é igual a ±2a, é dito
uma hipérbole.
Figura 3.4 - Seções cônicas
Teorema de Apolônio: Seja C um cone de duas folhas, de vértice V.
Seja p um plano que não contém V. Consideremos a cônica obtida
pela intersecção de C com p. Então:
se
• p não é paralelo a nenhuma geratriz, então a cônica é uma elipse. Observe que p corta o eixo e em um ângulo e que
2
p
< ≤ (note que, quando
2
p
= , a curva é uma
circunfe-rência, que é uma elipse, então);
Paralelo a nenhuma geratriz: o plano paralelo a p passando por V
se
• p é paralelo a somente uma geratriz, a cônica é uma pará-bola (observe que, nesse caso, = );
se
• p é paralelo a duas geratrizes, a cônica é uma hipérbole (note que, se p cortar o eixo e, 0< < ).
θ θ
θ
α
α > θ α = θ α < θ
α
α
Elipse Parábola Hipérbole
V V V
π
π π
Figura 3.5
Não apresentaremos aqui a prova desse teorema, também chamada
de prova de Dandelin, que utiliza esferas inscritas em um cone —
essas esferas, hoje, são conhecidas como esferas de Dandelin, em homenagem a esse matemático belga. A prova pode ser encontrada em alguns livros (por exemplo, em [7]). Há vários sítios na rede com essa prova, que depende muito de uma boa representação gráfica para ser bem compreendida. A seguir, um pouco de teoria sobre cada cônica.
3.2 Parábola
Definição 3.2. Dados uma reta r e um ponto F no plano 2, tais
que F não pertence a r, uma parábola p de foco F e diretriz r é o
conjunto dos pontos P eqüidistantes de F e de r, isto é,
Paralelo a somente uma geratriz: o plano paralelo a
p passando por V contém
somente uma geratriz do cone.
Paralelo a duas geratrizes:
o plano paralelo a p passando por V contém
2
{P | (P, F) (P, )} p= ∈ d =d r .
F
r
Figura 3.6
Uma parábola no plano cartesiano é descrita por uma equação al-gébrica, isto é, podemos considerar uma parábola qualquer como um conjunto de pontos ( , )x y do plano tais que suas coordenadas
x e y satisfazem uma certa equação.
Exemplo 1: Considere a reta : 5
4
r y=− e o ponto 2 , 3
4 F = −
. Seja
( , )x y um ponto P arbitrário da parábola p, definida a partir dessa
diretriz e desse foco. Temos que
( , ) ( , ) d P F =d P r ⇔
2
2 3 5
( 2)
4 4
− + + = + ⇔
x y y
2 2
2 3 5
( 2)
4 4
x y y
⇔ − + + = +
;
que, por sua vez, é equivalente à equação
. 3 4
2− +
=x x
y
Dada agora a função quadrática g:→ definida por
2
( ) 4 3
g x =x − x+ , a parábola acima é ográfico de g.
Parábola é a primeira cônica ao qual somos apresentados, ainda no nível fundamental, como sendo a curva que representa o gráfico de uma função quadrática no plano cartesiano.
Lembre-se que o gráfico da função g é o conjunto
Definição 3.3. Uma função f :→ é dita ser quadrática (ou do
segundo grau) se, e somente se, existirem constantes reais a b, e c,
com a≠0, tais que ∀ ∈x , ( )f x =ax2+bx c+ .
As funções f :→ dadas por f x( )=x2, f x( )=(x+3)2, ou 2
( ) 0, 5 0, 9
f x = − x + x são, todas, exemplos de funções quadráticas.
Observe que nem toda parábola é o gráfico de uma função quadrá-tica, como mostra o exemplo seguinte.
Exemplo 2: Vamos obter uma equação para a parábola de foco
( 1,1)
F = − e diretriz r y: =x. Se P=( , )x y é um ponto arbitrário
dessa parábola, temos:
2 2
( , ) ( , ) ( 1) ( 1)
2 y x d P F =d P r ⇒ x+ + y− = − .
Calculando, obtemos (verifique!) que essa equação é equivalente à equação
2 2
2 4 4 4 0.
x + xy+y + x− y+ =
Note que a equação encontrada no exemplo 1 corresponde a uma equação que define uma função quadrática. Porém, a equação do exemplo 2 não corresponde a uma equação de função quadrática, pois dado um valor arbitrário para x (com exceção de apenas um
valor, descubra qual) existem dois valorespossíveis para y.A
figu-ra abaixo nos dá um esboço desta parábola, cujos eixos de simetria não são paralelos aos eixos cartesianos.
d y
F
x
Exemplo 3: Vamos obter uma equação para a parábola de foco (0, )
F = p e diretriz r y: = −p, p>0. Se P=( , )x y é um ponto
arbi-trário dessa parábola, temos:
( , ) ( , )
d P F =d P r ⇔ 2 2
(x−0) +(y−p) = +y p ⇔
2
2 3 2
( 0) ( )
4
⇔ − + + = + ⇔
x y y p
2
4 0
⇔ x − yp= .
Note que se 1
4 = p
a, então obtemos a parábola
2
=
y ax . Deste modo,
o foco e a diretriz da parábola = 2
y ax são, respectivamente,
1 0,
4
a e
1 :
4 = − r y
a.
Exercício
Obtenha uma equação para as parábolas, cujo foco e cuja
dire-1)
triz são dados abaixo, esboçando-as:
a) F=(0, 1), :− r y=1;
b) 1, 0 , : 1
4 4
F= r x= −
;
c) F=(0, 0), :r y= +x 1.
O eixo de uma parábola é, por definição, a reta perpendicular à sua
diretriz que passa por seu foco. Esse eixo é um eixo de simetria da figura (a definição de parábola resulta em uma figura simétrica em relação à reta que passa pelo foco e é perpendicular à diretriz) . O eixo de uma parábola é uma reta vertical se, e somente se, a diretriz dessa parábola é uma reta horizontal. O eixo de simetria da parábola intercepta-a em um ponto chamado de vértice. Vamos mostrar que a
equação de uma parábola é da forma 2
y=ax +bx c+ , com a≠0, se, e
somente se, o seu eixo de simetria é paralelo ao eixo das ordenadas.
Proposição 3.1. O gráfico de uma função quadrática é uma
Demonstração: Considere a função quadrática 2
y=ax +bx c+ , em
que a ≠0. Note que essa equação é equivalente à equação
2 2 2
2
4 4
b b b
y a x x c
a a a
= + + − +
.
Denotando 2
4 −
b ac por ∆, essa equação também é equivalente à
equação
2
4 2
b
y a x
a a
∆
+ = +
.
Fazendo '
4 ∆ = +
y y
a e '= + 2 b
x x
a , podemos reescrever esta
equa-ção da seguinte forma 2
'= ( ')
y a x , que corresponde (ver exemplo 3)
a uma parábola cujos foco e diretriz, no eixo 0 '0 'x y , são 0, 1 4
a e 1
:
4 = − r y
a, respectivamente (ver figura 3.8).
y y' x' x 0 ∆ 4a − b 2a − Figura 3.8
Deste modo, no sistema 0 0x y, y=ax2+bx+c é a equação da
pa-rábola cujo foco é o ponto , 1
2 4 b a a −∆ + −
e cuja diretriz é a reta
a y 4 1 − ∆ − = .
Por conseguinte, o seu eixo de simetria, que é perpendicular à diretriz, é uma reta vertical, isto é, paralelo ao eixo das ordenadas.
Exercício
Obtenha o foco e a diretriz das parábolas dadas por
2)
a) y=x2;;
b) y=x2 +2;;
c) y=x2 +4x+4;;
d) y=−x2;;
e) y=2x2 −7x+2;
f) y=−2x2 +x.
Vamos mostrar agora a recíproca da proposição anterior.
Proposição 3.2. Uma parábola cujo eixo é uma reta vertical é o grá-fico de uma função quadrática.
Demonstração: Seja p uma parábola com eixo vertical. Logo, sua
di-retriz é uma reta horizontal: y=c, em que c denota uma constante.
Seja F =( , )r s seu foco. Como F não pertence à diretriz, s≠c.
Assim, para todo ponto ( , )x y da parábola, temos que
2 2
(x r− ) +(y−s) = −y c .
Logo, 2 2 2 2
2(s c y− ) =x −2rx r+ + −s c .
Como s ≠ c, podemos definir
1 :
2( )
= − a
s c , := −( − ) r b
s c ,
2 2 2
: .
2( )
r s c c
s c + − =
−
Assim, a equação acima fica na forma 2
y=ax +bx c+ , que define
uma função quadrática.
■
Exercício
Aplicando a técnica utilizada na demonstração da proposição
3)
a) 3, 0 , : 1
2 2
F = r y= −
;
b) 7, 0 , : 1
2 2
F = r y=
;
c) 0, 3 , : 5
4 4
F = − r y= −
.
Observação: No exercício 1 b), vimos que uma equação da parábola
com foco 1, 0 4
e diretriz
1 :
4 = − r y
a é
2
y
x= , cujo traçado
cor-responde à união dos gráficos das funções y = x e y=− x, em
que x≥0. Da mesma forma, o gráfico da função y− y0 = x−x0,
0
x
x≥ , é um dos ramos da parábola 2
0 0
(y−y ) = −x x , cujo eixo de
simetria é a reta y= y0 e o vértice, o ponto ( ,x y0 0). Note que
2
0 0 ( 0) 0
y−y = x−x ⇒ y−y = −x x
mas que a recíproca não é válida.
Exercício
Esboce o gráfico das funções abaixo.
4)
a) y= x−2+1;
b) y=− x−2+1;
c) y=− x−2−1;
d) y=2 x−2+1.
Uma parábola, cujo eixo é paralelo é paralelo a um dos eixos coordenados, é descrita por uma das duas (famílias de) equa-ções seguintes (a equação normal de uma parábola):
2 0 ( 0)
y−y = x−x
• (o eixo de simetria é a reta y= y0);
2 0 ( 0)
x−x = y−y
3.3 Elipse
Definição 3.4. Seja dado um número positivo 2a, sejam dados dois
pontos fixos F1 e F2 (ditos focos), cuja distância entre si, 2c, é
me-nor que 2a. A elipse E de focos F1 e F2, de excentricidade c a, é o
conjunto dos pontos P, tais que a soma das distâncias de P a F1 e
de P a F2 é igual a 2a, isto é,
2
1 2
{ | ( , ) ( , ) 2 }
E= P∈ d P F +d P F = a .
Uma elipse no plano cartesiano é descrita por uma equação algé-brica, isto é, podemos representar uma elipse qualquer como um conjunto de pontos ( , )x y , do plano cartesiano, tais que suas
coorde-nadas x e y satisfazem uma certa equação.
Exemplo 1: Considere os focos F1 = −= −( c, 0),, 0), e FF=2 =( , 0)c , c>0,e a
ex-centricidade c
a . Seja ( , )x y um ponto P arbitrário da elipse,
defini-da a partir desses defini-dados. Temos que
1 2
( , ) ( , ) 2 d P F +d P F = a ⇔
2 2 2 2
( ) ( ) 2
⇔ x+c +y + x c− +y = a ⇔
2 2 2 2
(x c) y 2a (x c) y
⇔ + + = − − + ⇔
2 2
(x c) y
⇔ + + = 2 2 2 2 2
4a −4a (x c− ) +y + −(x c) +y ⇔
2 2 2
( )
a x c y a cx
⇔ − + = − ⇔
2 2 2 2 2 4 2 2 2
( 2 ) 2
a x cx c a y a a cx c x
⇔ − + + = − + ⇔ ⇔ − = + −
⇔ 2 2 2 2 2 2 4 2 2
c a a y a x c x a
2 2 2 2 2 2 2 2
(a c x) a y a a( c )
⇔ − + = − ⇔ 1 2 2 2 2 2 = − + ⇔ c a y a x .
A excentricidade de uma elipse é um número entre
0 e 1 0 c 1
a < <
, que