Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
Mapas Cognitivos Fuzzy Dinâmicos Hierárquicos para arquitetura
cooperativa de robótica móvel autônoma inspirada por SLAM e ACO
Hierarchical Dynamic Fuzzy Cognitive Maps for autonomous mobile
robotics cooperative architecture inspired by SLAM and ACO
DOI:10.34117/bjdv6n2-275
Recebimento dos originais: 30/12/2019 Aceitação para publicação: 27/02/2020
Márcio Mendonça
Pós Doutor em Sistemas Computacionais Inteligentes Instituição: Universidade Tecnológica Federal do Paraná
Endereço: Av Alberto Carazzai 1640 E-mail: mendonca@utfpr.edu.br
Francisco de Assis Scannavino Junior Doutorado em Física Aplicada
Instituição: Universidade Tecnológica Federal do Paraná Endereço: Av Alberto Carazzai 1640
E-mail: franciscojunior@utfpr.edu.br
Lucas Botoni de Souza
Engenheiro Controle e Automação (Defesa agendada defesa mestrado) Instituição: Universidade Tecnológica Federal do Paraná
Endereço: Av Alberto Carazzai 1640 E-mail :lucsou@alunos.utfpr.edu.br
Rodrigo Henrique Cunha Palácios Doutor em Engenharia Elétrica
Instituição: Universidade Tecnológica Federal do Paraná Endereço: Av Alberto Carazzai 1640
E-mail: rodrigopalacios@utfpr.edu.br
José Augusto Fabri
Doutorado em Engenharia de Produção
Instituição: Universidade Tecnológica Federal do Paraná Endereço: Av Alberto Carazzai 1640
E-mail: Fabri@utfpt.edu.br
RESUMO
Este trabalho apresenta uma arquitetura de navegação robótica construída através de Mapas Cognitivos Fuzzy Dinâmicos e Hierárquicos (HD-FCM), uma evolução dos Mapas Cognitivos
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
Fuzzy, aplicadas em navegação autônoma, em especial navegação autônoma cooperativa. A arquitetura proposta é inspirada na arquitetura de subsunção de Brooks devido ao gerenciamento hierárquico de funções e processamento paralelo, e em conceitos de técnicas de SLAM como Landmarks artificiais e recuperação de informações. Entretanto, a logística de operação é inspirada em Robótica Coletiva, em especial no comportamento de formigas para otimização de trajetória. Uma arquitetura de um controlador baseado HD-FCM é desenvolvida com vários níveis de funcionalidades, desde ações de baixo nível até o nível mais alto de gerenciamento, planejamento de ações, sintonia dinâmica do modelo. No último nível é inserido no modelo um compartilhamento de trajetória entre uma sequência agentes, através de uma memória de tráfego baseado em sistemas multiagentes, técnicas de SLAM e algoritmos bioinpirados.
Palavras-chave: Mapas Cognitivos Fuzzy Dinâmicos. Navegação Autônoma Cooperativa. Arquitetura de Subsunção. Sistemas Multiagentes. Lógica Fuzzy.
ABSTRACT
This paper presents a robotic navigation architecture built by Hierarchical-Dynamic Fuzzy Cognitive Maps (HD-FCM), an evolution of Fuzzy Cognitive Maps, applied to autonomous navigation, especially cooperative autonomous navigation. The proposed architecture is inspired by Brooks subsumption architecture due its hierarchical management functions and parallel processing, and concepts of SLAM techniques as artificial Landmarks and information retrieval. However, Collective Robotics inspires the operation of logistics, especially on ant behavior for trajectory optimization. An architecture based on HD-FCM controller is designed with several levels of functionality, from low-level actions to the highest level of management, planning actions, dynamic tuning of the model. In the last level is inserted into the model a trajectory sharing among the agents through a traffic-based multiagent system memory, SLAM tech-niques and bioinspired algorithms.
Keywords: Dynamic Cognitive Networks. Cooperative Autonomous Navigation. Subsumption Architecture. Multiagent Systems. Fuzzy logic.
1 INTRODUÇÃO
Há um interesse crescente pelo aprimoramento de robôs e veículos autônomos, pois são necessários diferentes níveis de autonomia para diferentes aplicações. Alguns exemplos de robôs móveis e seu uso podem ser vistos em soldagem, investigação de condições e outras situações que podem apresentar riscos à saúde humana (MENDONÇA et al., 2013a). Robôs pequenos e de baixo custo podem ser usados para pesquisar essas áreas de uma perspectiva mais próxima e também podem localizar vítimas de desastres naturais. O recente crescimento
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
da robótica de enxame também pode ser mencionado, pois esses robôs podem ser usados juntos para explorar áreas maiores (YANGUAS-ROJAS; MOJICA-NAVA, 2017). Um exemplo interessante da robótica autônoma está no robô Curiosity, lançado em 2011 pela NASA (Figura 1) para investigar as condições de Marte.
Figura 01 – Robô autônomo Curiosity, da NASA
Fonte: https://www.finetech.de/ru/resursy/istorii-klientov/mars-behind-the-scenes/.
A aplicação da teoria de sistemas autônomos tem a capacidade de executar tarefas complexas com alto grau de sucesso (RUSSELL; NORVIG, 2009). Neste contexto, a complexidade envolvida nas tarefas de geração de trajetórias eficientes é reconhecidamente alta e, em muitos casos, exige que o sistema autônomo seja capaz de aprender uma estratégia de navegação através da interação com o ambiente (LI; LIU; WANG, 2014).
Nesse contexto, a robótica autônoma vem emergindo como um tema recorrente devido à evolução tecnológica e, mais recentemente, à sua participação nos conceitos da Indústria 4.0. Assim, ressalta-se que a robótica autônoma é um dos pilares dessa revolução, como mostra a Figura 2. O termo Indústria 4.0 foi criado em 2011, referente à quarta revolução industrial. Nesse cenário, máquinas industriais ou sistemas ativos são caracterizados pelo uso de sistemas em rede inteligentes, a fim de proporcionar maior flexibilidade, eficiência e integração com toda a cadeia produtiva.
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761 Figura 02 – Pilares da Indústria 4.0
Fonte: Müller e Azevedo (2018).
Robótica e agentes autônomos podem ser aplicados em diferentes áreas, por exemplo, em segurança (para evitar situações de risco para os seres humanos), na exploração de difícil acesso ou ambientes de perigo, e no serviço de forma crítica. Este é um campo emergente de pesquisa e aplicação, tal como apresentado por Tolba, Ammar e Rajasekaran (2015). Pesquisas em robótica autônoma, em particular robótica coletiva utilizando sistemas biológicos inspirados em insetos com vida social (inteligência coletiva), são conhecidas na literatura. Ainda, pode-se citar trabalhos com robótica coletiva (swarm robotics) como Barca e Sekercioglu (2013), Bayindir (2016), Beni (2004) e Iftekhar, Rahman, Rahman (2019), entre outros.
Esses trabalhos se utilizam grupos de robôs com comportamento inspirado em colônia de insetos são utilizados para gerenciar mais de um agente ou robô (móvel) na execução de suas funcionalidades. A aplicação das técnicas e /ou conceitos de robótica coletiva estão relacionados com sistemas autônomos e sistemas multiagentes. Da teoria de sistemas multiagentes são geralmente exigidos para resolver problemas em ambientes
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
dinâmicos e imprevisíveis. Nestas circunstâncias, uma capacidade de aprender é particularmente importante para ambientes com mudanças rápidas (ZHONG; KIMBROUGH; WU, 2002).
O conceito explorado nesse trabalho é o de inteligência coletiva, no qual a arquitetura utiliza a capacidade de evolução de um agente; conceitualmente evolução é diferente de aprendizado, porque um agente só pode evoluir caso o mesmo herde conhecimento de outro agente anterior, enquanto que aprendizado o agente só precisa de si mesmo (COPPIN, 2004). Os conceitos citados serão contextualizados no ambiente de simulação proposto, no qual obstáculos dinâmicos surgem durante a trajetória, alvos necessitam ser alcançados pelo agente móvel, dados de exploração serão compartilhados entre os mesmos. Desse modo, existem diferentes objetivos, com alguns até conflitantes como a coleta de alvos e desvio de obstáculos em um cenário praticamente desconhecido incialmente pelos agentes exploradores. De modo geral, essa pesquisa trata problemas com decisões sequenciais em ambientes parcialmente ou totalmente desconhecidos com múltiplos objetivos. Nesse nível de complexidade a arquitetura proposta apresenta capacidade de aprendizado, de sintonia, adaptação e evolução e tomadas de decisões de forma hierárquica. Essas características serão necessárias para gerenciamento de ações. No nível mais alto da arquitetura HD-FCM apresenta um algoritmo bioinspirado, inspirado na tarefa de coleta de alimentos por colônias de formigas (DORIGO; BIRATTARI; STÜTZLE, 2006).
De modo específico, a proposta dessa pesquisa é de se explorar a capacidade de aquisição de conhecimento e refinar com dados históricos e/ou comportamento dinâmico (sintonia on-line) na construção de uma arquitetura de controle baseada na arquitetura de subsunção de Brooks (1986).
A construção da arquitetura de controle pode ser dividida em dois passos: no primeiro passo o controlador utilizará inicialmente conhecimento de baixo nível (virar e esquerda caso surja um obstáculo à direita), observa-se que o FCM clássico é atemporal e reativo (os conceitos de saída respondem diretamente aos conceitos de entrada); assim uma saída para essas limitações, está na detecção da ocorrência de eventos (surgimento de alvos ou obstáculos, os quais exigem dos controladores decisões hierárquicas).
Um algoritmo de aprendizagem por reforço (SUTTON; BARTO, 2017), ou um algoritmo de aprendizagem adaptado de Hebb, podem ser utilizados para uma sintonia (ajuste fino) do modelo cognitivo em tempo de navegação; neste trabalho são usados algoritmos de aprendizagem por reforço adaptados por regras heurísticas. Assim, devido à execução de
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
funcionalidades diferentes e possivelmente conflitantes, uma arquitetura híbrida será desenvolvida inspirada na de subsunção. Porém, com o incremento de funcionalidades de forma gradativa, de forma similar ao trabalho de Braitenberg (1986).
O segundo passo utiliza todas as recursividades do primeiro, entretanto, dados da trajetória dos robôs anteriores são também utilizados pelos robôs posteriores de forma ponderada para reconhecimento do ambiente. Essa segunda etapa é inspirada no comportamento de formigas, devido a um rastro (ou memória de posição) deixado. Por fim, para verificar a robustez do controlador modelado, pode-se inserir um ruído branco no sistema, que pode simular condições reais como imprecisão dos sensores de um robô. Um exemplo de ruído branco é mostrado na Figura 3.
Figura 03 – Exemplo de ruído branco
Fonte: Autoria própria.
2 FUNDAMENTAÇÃO TEÓRICA
Mapas Cognitivos Fuzzy (FCMs) e suas evoluções são sistemas não lineares dinâmicos para a modelagem de conhecimento causal. Eles combinam aspectos da lógica Fuzzy, redes neurais artificiais (RNAs), redes semânticas, sistemas especialistas, não lineares e sistemas dinâmicos. FCMs são capazes de modelar sistemas complexos e se aplicam a uma ampla gama de problemas em engenharia e áreas afins (PAPAGEORGIOU, 2014).
Diversos trabalhos e aplicações são encontrados na literatura como os trabalhos de Papageorgiou, Stylios e Groumpos (2006) e Amirkhani et al. (2017) na área médica, Mendonça et al. (2016) para navegação robótica; em controle de processos (DE SOUZA et
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
al., 2018), identificação de falhas em motores (KARATZINIS; BOUTALIS; KARNAVAS, 2018), entre outros.
Trabalhos específicos, como métodos de treinamento dos FCMs, são apresentados em Papageorgiou (2012), Papageorgiou e Salmeron (2013) e Felix et al. (2017). Devido à dificuldade de tratamento dinâmico das informações, variações – ou evoluções – dos FCMs surgiram na literatura. Podem ser citados os trabalhos de Carvalho e Tomé (2001) com os Rule-based Fuzzy Cognitive Maps, Salmeron e Papageorgiou (2014) com os Fuzzy Grey Cognitive Maps e Mendonça et al. (2013b) com os Dynamic Fuzzy Cognitive Maps.
3 DESENVOLVIMENTO
Atualmente, nos sistemas de controle dos robôs móveis, utilizam-se técnicas de inteligência computacional tais como: Redes Neurais Artificiais (RNAs), lógica Fuzzy ou a combinação destas com técnicas com outras técnicas inteligentes, em especial para ajuste ou otimização, como Algoritmos Genéticos (AGs), por exemplo. O uso dessas técnicas é devido a capacidade dos seres humanos de lidar com processos complexos, baseados em informações imprecisas e/ou aproximadas. A estratégia adotada por eles é também de natureza imprecisa e geralmente passível de ser expressa em termos linguísticos (ZADEH, 1976). Deste modo, através de conceitos da lógica Fuzzy, é possível modelar esse tipo de informação. Entretanto, informações também podem ser adquiridas a partir dos dados de operação e/ou, funcionamento de um sistema através de técnicas de identificação e modelagem (ROSS, 2010).
3.1 ARQUITETURA DE SUBSUNÇÃO HD-FCM
As tomadas de decisões e inferências neste tipo de arquitetura funcionam em processamento paralelo e são capazes de tomar decisões relacionadas a comportamentos humanos como “raciocinar sobre o comportamento de objetos” e “explorar” o ambiente (BROOKS, 1986).
A arquitetura de Subsunção é a mais conhecida para agentes inteligentes e foi proposta por Brooks (1986). Algumas características são citadas: utiliza uma hierarquia que prioriza funções de acordo com a heurística de operação do processo. É uma arquitetura baseada na ação-situação. As decisões dos agentes são realizadas através de um conjunto de comportamentos direcionados a tarefas a cumprir. Tem inspiração na neurobiologia, em especial, na sinergia que existe entre a sensação e a atuação de insetos, entre outras.
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
Deste modo, cada camada é capaz de inibir o comportamento das camadas abaixo dela. A Figura 4 mostra arquitetura HD-FCM-Subsunção, inspirada na clássica arquitetura, porém foram acrescidas de funcionalidades com somente três camadas. Nessa aplicação prioridade é desvio de obstáculos, encontrar alvos e se o caminho esteja livre é ativada uma ação de exploração, no caso é andar em linha reta. As funcionalidades e consequentemente as ações funcionam de modo hierárquico, entretanto o algoritmo de aprendizagem por reforço e o protocolo de comunicação entre agentes funcionam de modo paralelo. A hierarquia implementada foi desviar de obstáculos a de maior prioridade, seguida de coletar alvos e explorar o ambiente (em linha reta). A Figura 5 mostra a estratégia do controlador por meio de uma máquina de estados.
Figura 04 –Arquitetura HD-FCM
Fonte: Autoria própria.
Figura 05 – HD-FCM-Subsunção cooperativa
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
No modo geral, uma arquitetura híbrida visa ser adequado para a resolução de problemas complexos, atingindo metas ou objetivos de uma forma otimizada e eficiente (ROMERO et al., 2014). A Figura 4 mostra a arquitetura HD-FCM. A arquitetura proposta é apresentada de forma genérica, para ajudar o desenvolvimento HD-FCM. Cada bloco representa uma parte específica do sistema.
O Sistema de Percepção simboliza os sensores; Sistema dos Estados Internos, a máquina de estados finitos; o Sistema do Comportamento, o FCM; o Sistema de Aprendizagem, o algoritmo dinâmico de aprendizagem; do Ambiente, a interação com o ambiente (percepção, planejamento e ações).
Por fim, o, Sistema dos Motores, responsável pelos movimentos agente inferências sobre o ambiente de acordo com seu estado atual ou objetivo (evitar obstáculos, atingir os alvos ou compartilhar memória de navegação), sintonizado dinamicamente por um algoritmo de aprendizagem por reforço heurístico inspirado nos trabalhos Sutton e Barto (2017) e Costa e Gouvêa Jr (2010).
Em resumo, a arquitetura HD-FCM-Subsunção combina diversas técnicas computacionais inteligentes (lógica Fuzzy, RNAs, Teoria de Agentes, em especial Arquiteturas Computacionais Híbridas) e é orientada a eventos. Em resumo, o método proposto neste trabalho para construção de modelos cognitivos baseados em HD-FCM, emprega vários conceitos e técnicas que estão na interseção de 3 áreas bases dos sistemas inteligentes. Da teoria de agentes inteligentes vem às características da arquitetura de subsunção, como: adaptação com ambiente, hierarquia de ações. Da lógica Fuzzy, o método herda as técnicas de aquisição de conhecimento e tratamento de incertezas e, por fim das redes neurais, utilizou-se a capacidade de treinamento e a representação estrutural em forma de grafos.
Dos FCMs clássicos são herdadas as relações de causa e efeito (W1-W7) que nesse caso são responsáveis pelas ações de baixo nível (Figura 6). Detalhes construtivos desse HD-FCM pode ser conferida em um capítulo do trabalho Papageorgiou (2014) desenvolvido por Mendonça e colaboradores.
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761 Figura 06 – HD-FCM-Subsunção cooperativa (estratégia modificada)
Fonte: Autoria própria.
Os conceitos DXL e DXR são conceitos que processam a distância com os alvos, e, junto com as relações de seleção (WS4 e WS5) disparam o evento de busca de alvos. Já as relações WS1, WS2 e WS3 são relações que disparam a redução do efeito de “zig-zag” juntamente com os conceitos de fator de saída. WS6 representa a relação de seleção para a ativação do conceito de colisão. As relações WS7, WS8 e WS9 são conceitos de seleção para utilizar informações de outros agentes, armazenados na memória do agente.
Duas estratégias serão avaliadas nessa pesquisa, com inspiração no comportamento de formigas na busca de alimentos que através de feromônios deixados pelo caminho, que proporcionam o compartilhamento de uma memória de navegação que, ao passar do tempo, passa a ser otimizada (DORIGO; BIRATTARI; STÜTZLE, 2006). Olhando pelo ponto de vista de técnicas de SLAM, esse trabalho utiliza conceitos de Landmark artificial (memória de rastro ou de tomadas de decisões) e resgate de memória de navegação (PANCHPOR; SHUE; CONRAD, 2018).
Em resumo, as técnicas operam de forma que o robô antecedente compartilha sua memória de navegação e é, a posteriori, utilizada pelo sequente, não como forma de sensores e sim de forma matemática. As duas estratégias de diferem do seguinte modo: a primeira utiliza 95% das ações tomadas pelos HD-FCM e 5% da memória de navegação; já a segunda compartilha somente 1% somente a uma distância de 40 cm antes do ponto considerado crítico da trajetória. Com isso o robô sucessor fica mais autônomo ganha uma maior capacidade de
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
autonomia e, nos cenários investigados, obtiveram melhores resultados, inclusive com uma pequena entrada de ruído nos sensores de entrada (para aproximar as simulações de situações reais).
A diferença dos HD-FCM são as funções de seleção inseridas entre conceito de memória e as saídas (na versão inicial, não era necessária). Figura 4 mostra um pequeno ruído branco inserido na entrada dos sensores, porém não foi escopo desse trabalho analisar o comportamento desses controladores. Porém resultados iniciais apontam melhores resultados para a estratégia 2.
4 RESULTADOS E DISCUSSÃO
Um ambiente é classificado como dinâmico quando existem objetos móveis na cena e estático quando todos os objetos são fixos (MENDONÇA; ARRUDA; NEVES-JR, 2011). Um simulador com animação 2-D foi também desenvolvido para testar e validar o sistema de navegação desenvolvido. No ambiente de simulação, o rastro com três cores ou tons mais intensos simboliza o robô móvel. Já os sinais de “+” mais claros simbolizam os obstáculos estáticos, o sinal “*” em um tom mais forte representa um obstáculo dinâmico, o símbolo “o” representa obstáculos que surgem durante a navegação (obstáculos “inesperados”) do robô móvel, e finalmente o “▲” representa os alvos a serem coletados pelo robô.
Nas simulações com obstáculos dinâmicos uma trilha ou rastro também é usado para mostrar a sequência de ações de direção e aceleração na trajetória. Quando os ambientes são virtuais, apontam-se algumas vantagens. Como por exemplo, tornar-se mais fácil manter o foco e os objetivos nas tarefas em que se deseja estudar. Em robôs, diversos problemas tais como ruídos, problemas com sensores e atuadores acabam desviando a atenção do que seria o foco principal (HEXMOOR, 2013).
A Figura 7 mostra todo o cenário, o mesmo em todos os experimentos ou rodadas. A Figura 8 mostra a memória de navegação “rastro” das ações do primeiro agente. A Figura 9 destaca o ponto crítico que necessita de ação de frenagem ré. A Figura 9 mostra as ações do segundo agente com as duas estratégias. Para a primeira estratégia, o agente móvel ainda colide com o mesmo obstáculo, mas quase consegue evitar. Para a segunda estratégia, o agente consegue desviar do obstáculo em sua segunda passagem, como pode ser observado na Figura 9.
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761 Figura 07 – Visão geral do cenário simulado
Fonte: Autoria própria.
Figura 08 –Memória de navegação (rastro) do primeiro agente
Fonte: Autoria própria
A dificuldade imposta no cenário de teste sugere nível complexidade no problema; na primeira passagem uma colisão é iminente e ocorre no ponto (x=2, y=121). Entretanto, como se pode observar que na segunda passagem, o agente móvel ainda colide com o mesmo obstáculo, mas quase consegue evitar. Já na terceira passagem com a “evolução” da trajetória anterior, o agente consegue desviar do obstáculo sem acionar o estado de ré. Deve-se observar que algoritmos de aprendizado são utilizados off-line e até mesmo on-line, porém o conceito de evolução não se pode aplicar no mesmo indivíduo ou agente.
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761 Figura 09 – Memória de navegação do segundo agente ampliada no ponto crítico (estratégia 1 e 2)
Fonte: Autoria própria
Figura 10 – Visão ampliada da Memória de navegação do terceiro agente ampliada no ponto crítico da estratégia 1, supera ponto crítico na terceira rodada
Fonte: Autoria própria
A Figura 10 mostra que o terceiro agente (utilizando a estratégia 1) consegue executar uma trajetória sem dar ré, ou seja, tem uma melhor otimização durante trajetória, devido aos dados históricos previamente compartilhados pelos agentes anteriores. Já na terceira passagem com a “evolução” da trajetória anterior, o agente consegue desviar do obstáculo sem acionar o estado de ré. também ampliada, e pode-se observar que o agente ou robô móvel passa mais
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
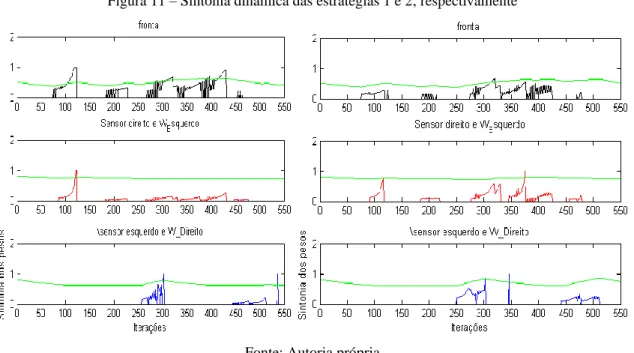
distante, entretanto ainda dispara a ré. Observa-se que os cenários simulados podem ser reproduzidos em uma escala de 1:100 na construção de cenários reais. A Figura 11 mostra a sintonia dinâmica para as duas estratégias, de acordo com a intensidade dos sensores.
Figura 11 – Sintonia dinâmica das estratégias 1 e 2, respectivamente
Fonte: Autoria própria
5 CONCLUSÕES
Devido aos resultados, por meio de experimentos simulados, ainda que iniciais, em especial, com condições praticamente ideais (sem presença de ruídos reais, somente ruído branco, ou sinais fantasmas, como nos sensores de ultrassom). Entretanto, quanto à cooperação entre os agentes, pode-se observar autonomia, capacidade de adquirir conhecimento para compensar conhecimento prévio incerto ou parcial. Ressalta-se que: com a utilização de algoritmo A.R. a interação com ambiente as tomadas de decisões finais foram sintonizadas e atenuadas as incertezas das ações de baixo nível.
A arquitetura HD-FCM-Subsunção mostrou capacidade de aprendizado, adaptação e cooperação que habilitaram o agente ser racional, durante navegação as inferências determinaram sequências de ações que permitiram alcançar seus objetivos (explorar: desviar obstáculos e coletar alvos). Ressalta-se a atuação da cooperação entre os agentes, em especial, na terceira rodada, para estratégia 1 e na segunda rodada para estratégia 2, não necessitou dar ré no ponto mais crítico do cenário. Outro fato negativo para a estratégia 1 foi a perda do
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
primeiro alvo já na segunda rodada. Espera-se ter contribuído no desenvolvimento de arquiteturas de controle para construção de agentes e sistemas multiagentes autônomos móveis com ou sem cooperação através de uma arquitetura híbrida.
Futuros trabalhos endereçam a construção de mais cenários e com maior complexidade. Investigar o comportamento dos controladores na presença de ruídos, e alterações no ambiente ou cenário, que apesar de elementos dinâmicos ele se repete. Continuar a investigação da ferramenta proposta aplicada em robótica de grupo. E, finalmente comprar com outras técnicas inteligentes, como sistemas Neuro-Fuzzy, e embarcar em plataformas robóticas reais.
REFERÊNCIAS
AMIRKHANI, A. et al. A Review of Fuzzy Cognitive Maps in Medicine: Taxonomy, Methods, and Applications. Computer Methods and Programs in Biomedicine, v. 142, p. 129–145, 2017.
BARCA, J. C.; SEKERCIOGLU, Y. A. Swarm robotics reviewed. Robotica, v. 31, n. 3, p. 345–359, 2013.
BAYINDIR, L. A review of swarm robotics tasks. Neurocomputing, v. 172, p. 292–321, 2016.
BENI, G. From Swarm Intelligence to Swarm Robotics. (E. Şahin, W. M. Spears, Eds.)Swarm Robotics. SR 2004. Lecture Notes in Computer Science. Anais...Heidelberg: Springer Berlin Heidelberg, 2004
BRAITENBERG, V. Vehicles: Experiments in Synthetic Psychology. 1. ed. Cambridge, USA: MIT Press, 1986.
BROOKS, R. A. A Robust Layered Control System For A Mobile Robot. IEEE Journal on Robotics and Automation, v. 2, n. 1, p. 14–23, 1986.
CARVALHO, J. P.; TOMÉ, J. A. B. Rule based fuzzy cognitive maps-expressing time in qualitative system dynamics. 10th IEEE International Conference on Fuzzy Systems. Anais...Melbourne, Victoria, Australia: IEEE, 2001
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761 Bartlett Learning, 2004.
COSTA, E. D. S.; GOUVÊA JR., M. M. Autonomous navigation in dynamic environments with reinforcement learning and heuristic. 9th International Conference on Machine Learning and Applications, ICMLA 2010. Anais...Washington, DC, USA: IEEE, 2010
DE SOUZA, L. B. et al. Fuzzy Cognitive Maps and Fuzzy Logic applied in industrial processes control. IEEE International Conference on Fuzzy Systems. Anais...Rio de Janeiro, Brazil: IEEE, 2018
DORIGO, M.; BIRATTARI, M.; STÜTZLE, T. Ant Colony Optimization. IEEE Computational Intelligence Magazine, v. 1, n. 4, p. 28–39, 2006.
FELIX, G. et al. A review on methods and software for fuzzy cognitive maps. Artificial Intelligence Review, n. March 2018, p. 1–31, 2017.
HEXMOOR, H. Essential Principles for Autonomous Robotics: Synthesis Lectures on Artificial Intelligence and Machine Learning. 1. ed. San Rafael, CA, USA: Morgan & Claypool, 2013.
IFTEKHAR, L.; RAHMAN, H. M. N.; RAHMAN, I. Area coverage algorithms for networked multi-robot systems. New Developments and Advances in Robot Control, v. 175, n. 1, p. 301–320, 2019.
KARATZINIS, G.; BOUTALIS, Y. S.; KARNAVAS, Y. L. Motor Fault Detection and Diagnosis Using Fuzzy Cognitive Networks with Functional Weights. MED 2018 - 26th Mediterranean Conference on Control and Automation. Anais...Zadar, Croatia: IEEE, 2018
LI, L.; LIU, Y.-H.; WANG, K. Trajectory Tracking of Nonholonomic Mobile Robots Using a Vision-based Adaptive Algorithm for Position and Velocity Estimation. IFAC Proceedings Volumes. Anais...Elsevier, 1 jan. 2014Disponível em: <https://www.sciencedirect.com/science/article/pii/S1474667016432386>. Acesso em: 13 ago. 2018
MENDONÇA, M. et al. Autonomous Navigation Applying Dynamic-Fuzzy Cognitive Maps and Fuzzy Logic. (H. Papadopoulos et al., Eds.)Artificial Intelligence Applications and Innovations. AIAI 2013. Anais...Berlin, Heidelberg: Springer Berlin Heidelberg, 2013a
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
supervision. Engineering Applications of Artificial Intelligence, v. 26, n. 4, p. 1199–1210, 2013b.
MENDONÇA, M. et al. Hybrid Dynamic Fuzzy Cognitive Maps and Hierarchical Fuzzy Logic controllers for Autonomous Mobile Navigation. 2016 IEEE International Conference on Fuzzy Systems, FUZZ-IEEE 2016. Anais...Vancouver, BC, Canada: IEEE, 2016
MENDONÇA, M.; ARRUDA, L. V. R.; NEVES-JR, F. Autonomous navigation system using Event Driven-Fuzzy Cognitive Maps. Applied Intelligence, v. 37, n. 2, p. 175–188, 2011.
MÜLLER, F.; AZEVEDO, A. A história da pesquisa operacional no Brasil - O caso dos encontros regionais de pesquisa operacional - ERPO. Pesquisa Operacional para o Desenvolvimento, v. 10, n. 1, p. 128–145, 2018.
PANCHPOR, A. A.; SHUE, S.; CONRAD, J. M. A Survey of Methods for Mobile Robot Localization and Mapping in Dynamic Indoor Environments. Signal Processing And Communication Engineering Systems (SPACES), 2018 Conference on. Anais...Vijayawada, India: IEEE, 2018
PAPAGEORGIOU, E. I. Learning Algorithms for Fuzzy Cognitive Maps—A Review Study. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), v. 42, n. 2, p. 150–163, 2012.
PAPAGEORGIOU, E. I. (ED.). Fuzzy Cognitive Maps for Applied Sciences and Engineering. Heidelberg: Springer-Verlag Berlin Heidelberg, 2014.
PAPAGEORGIOU, E. I.; SALMERON, J. L. A review of fuzzy cognitive maps research during the last decade. IEEE Transactions on Fuzzy Systems, v. 21, n. 1, p. 66–79, 2013.
PAPAGEORGIOU, E. I.; STYLIOS, C.; GROUMPOS, P. A Combined Fuzzy Cognitive Map and Decision Trees Model for Medical Decision Making. 2006 International Conference of the IEEE Engineering in Medicine and Biology Society. Anais...New York City, USA: IEEE, 2006
ROMERO, R. A. F. et al. (EDS.). Robótica Móvel. 1. ed. Rio de Janeiro, Brasil: LTC Editora, 2014.
ROSS, T. J. Fuzzy logic with engineering applications. 3. ed. New Mexico, USA: John Wiley & Sons, 2010.
Braz. J. of Develop.,Curitiba, v. 6, n. 2,p.9013-9030 feb. 2020. ISSN 2525-8761
RUSSELL, S.; NORVIG, P. Artificial Intelligence: A Modern Approach. 3. ed. Upper Saddle River, USA: Prentice Hall, 2009.
SALMERON, J. L.; PAPAGEORGIOU, E. I. Fuzzy grey cognitive maps and nonlinear Hebbian learning in process control. Applied Intelligence, v. 41, n. 1, p. 223–234, 2014.
SUTTON, R. S.; BARTO, A. G. Reinforcement Learning: An Introduction. 2. ed. Cambridge, USA: MIT Press, 2017. v. 1
TOLBA, S.; AMMAR, R.; RAJASEKARAN, S. Taking swarms to the field: A framework for underwater mission planning. 2015 IEEE Symposium on Computers and Communication (ISCC). Anais...Larnaca, Cyprus: IEEE, 2015
YANGUAS-ROJAS, D.; MOJICA-NAVA, E. Exploration with with Heterogeneous Heterogeneous Robots Robots Networks for Search and Rescue. IFAC-PapersOnLine, v. 50, n. 1, p. 7935–7940, 2017.
ZADEH, L. A. A fuzzy-algorithmic approach to the definition of complex or imprecise concepts. International Journal of Man-Machine Studies, v. 8, n. 3, p. 249–291, 1976.
ZHONG, F.; KIMBROUGH, S. O.; WU, D. J. Cooperative agent systems: Artificial agents play the ultimatum game. Proceedings of the Annual Hawaii International Conference on System Sciences. Anais...Big Island, HI, USA: IEEE, 2002