Desenho de modelos neuronais para a
detec¸ ˜ao de s´ısmos
Ozias Moisés Vieira Barros
Dissertação para a obtenção de Grau de Mestre em
Engenharia Electrónica e Telecomunicações
Orientador:
Prof. Doutor ANTÓNIO EDUARDO DE BARROS RUANOCo-orientador
: Mestre GUILHERME MADUREIRADesenho de modelos neuronais para a
detec¸ ˜ao de s´ısmos
Ozias Moisés Vieira Barros
Dissertação para a obtenção de Grau de Mestre em
Engenharia Electrónica e Telecomunicações
Desenho de modelos neuronais para a detec¸ ˜ao de s´ısmos
Declarac¸ ˜ao de autoria de trabalho
Declaro ser o autor deste trabalho, que ´e original e in ´edito. Autores e trabalhos consultados est ˜ao devidamente citados no texto e constam da listagem de refer ˆencias inclu´ıda.
Ozias Mois ´es Vieira Barros
Copyright c
A Universidade do Algarve tem o direito, perp ´etuo e sem limites geogr ´aficos, de arquivar e publicar este trabalho, atrav ´es de exemplares impressos reproduzidos em papel ou de forma digital, ou por qualquer outro meio conhecido ou que venha a ser inventado, de o divulgar atrav ´es de reposit ´orios cient´ıficos e de admitir a sua c ´opia e distribuic¸ ˜ao com objetivos educa-cionais ou de investigac¸ ˜ao, n ˜ao comerciais, desde que seja dado cr ´edito ao autor e editor.
A minha m ˜ae e em mem ´oria do meu pai.
Agradecimentos
Eu gostaria de expressar o mais sincero agradecimento ao meu orientador, Prof. Doutor ANT ´ONIO EDUARDO DE BARROS RUANO, pela sua inestim ´avel orientac¸ ˜ao, supervis ˜ao e apoio constante durante o desenvolvimento dessa dissertac¸ ˜ao. Essa orientac¸ ˜ao foi fundamen-tal para poder atingir os objetivos definidos no inicio deste trabalho.
Tamb ´em estou sinceramente grato ao Mestre Guilherme Madureira, por todos, os apoios prestados, seus concelhos e ajudas na resoluc¸ ˜ao dos problemas encontrados, colocando a minha disposic¸ ˜ao todo o conhecimento adquirido durante esses anos a trabalhar nessa ´area.
Devo tamb ´em agradecer a Fundac¸ ˜ao Calouste e Gulbenkian por me proporcionar bolsas de estudo, e a oportunidade de estudar durante esses fant ´asticos 5 anos na Universidade do Algarve.
Agradecimentos especais s ˜ao transmitidos a todos os meus professores e colegas, que durante esses anos tornaram mais agrad ´avel e memor ´avel a minha experi ˆencia na UALG.
Agradec¸o ao S ´ergio Silva, pelos apoios prestados durante o desenvolvimento do trabalho. Meu reconhecimento final e mais sincero deve ir para para a minha m ˜ae, irm ˜aos, primos, tios, tias, sobrinhos, amigos, conhecidos, pelo incentivo e amor. Sem eles, esse trabalho nunca teria existido.
Resumo
A performance dos detetores s´ısmicos atualmente utilizados pode e deve ser melhorada. Atualmente existem v ´arios algoritmos para a detec¸ ˜ao de sismos de forma autom ´atica, desde os sistemas simples baseados em STA/LTA, aos mais sofisticados baseados em reco-nhecimento de padr ˜oes. Este estudo pretende dar continuidade ao desenvolvimento de uma abordagem de detec¸ ˜ao de eventos s´ısmicos ao n´ıvel da estac¸ ˜ao local, utilizando uma t ´ecnica bastante conhecida, chamada M ´aquina de Vetores de Suporte (SVM). SVM ´e amplamente utilizada em problemas de classificac¸ ˜ao, devido a sua boa capacidade de generalizac¸ ˜ao.
Nesta experi ˆencia, a t ´ecnica baseada em SVM ´e aplicada em diferentes modos de operac¸ ˜oes. Os resultados mostraram que a t ´ecnica proposta d ´a excelentes resultados em termos de sen-sibilidade e especificidade, al ´em de exigir um tempo de detec¸ ˜ao suficientemente pequeno para ser utilizado num sistema de aviso precoce (early-warning system).
Comec¸amos pela classificac¸ ˜ao de dados de forma Off-line, seguido da validac¸ ˜ao do clas-sificador desenvolvido. Posteriormente, o processamento de dados ´e executado de forma cont´ınua (On-line).
Os algoritmos foram avaliados em conjuntos de dados reais, provenientes de estac¸ ˜oes s´ısmicas da Rede de Vigil ˆancia S´ısmica de Portugal, e em aplicac¸ ˜oes reais da ´area de Sismo-logia (simulac¸ ˜ao de funcionamento em ambiente real).
Apesar de apenas duas estac¸ ˜oes serem consideradas, verificou-se que utilizando a combinac¸ ˜ao de detetores, consegue-se uma percentagem de detec¸ ˜ao id ˆentica para quando utilizado um
´unico modelo (Abordagem OR) e o n ´umero de falsos alarmes para a combinac¸ ˜ao de modelos ´e quase inexistente (Abordagem AND).
Os resultados obtidos abrem v ´arias possibilidades de pesquisas futuras.
Palavras-chave:
M ´aquina de Vetores de Suporte, Redes Neuronais, Detec¸ ˜ao deSismos, Sistemas de Alerta Antecipado, Intelig ˆencia Computacional, Aprendizagem Ativa.
Abstract
The performance of the seismic detectors currently used can and should be improved.
Nowadays there are several algorithms for detecting seismic events automatically, ranging from a simple systems based STA/LTA,to the more sophisticated ones using pattern recognition techniques.
This study intends to continue the development of an approach for the seismic events de-tection, using a well known technique, called Support Vector Machine (SVM). SVM is widely used in classification problems because of its good generalization ability.
In this experiment, the SVM based technique is applied to different modes of operations. The results showed that the proposed technique gives excellent results in terms of sensitivity and specificity,and require a time of detection sufficiently small to be used in an early-warning system.
We start with Off-line data classification, following by a validation of the developed classifier. Subsequently, the data is processed continuosly, in On-line scheme.
The algorithms were tested on real data sets, from seismic stations of the Portugal Seismic Monitoring Network, and in real applications of Seismology (simulation of operation in real environment).
Despite only two stations were considered, it was shown that by using the combination of detectors the percentage of detections is similar to when using a single model (OR approach), and the number of false alarms for the combination of models is almost null (AND approach). The results obtained in this work have open possibilities for many future works .
Keywords:
Support Vector Machines, Neural Networks, Seismic Detection, Early-WarningSystems, Computational Intelligence, Active Learning .
”Si ka badu ka ta biradu”
Conte ´
udo
Declarac¸ ˜ao de autoria de trabalho . . . v
Agradecimentos . . . ix
Resumo . . . xi
Abstract . . . xiii
Lista de Tabelas . . . xxi
Lista de Figuras . . . xxiv
Lista de S´ımbolos . . . xxiv
Lista de Abreviaturas . . . xxvi
1 Introduc¸ ˜ao 1 1.1 Objetivos . . . 1
1.2 Motivac¸ ˜ao . . . 2
1.3 Conceitos B ´asicos . . . 3
1.3.1 Reconhecimento de Padr ˜oes . . . 3
1.3.2 M ´etodos de Classificac¸ ˜ao . . . 4
1.3.3 Abordagens de reconhecimento de padr ˜oes . . . 6
1.4 Aprendizagem Ativa . . . 7
1.4.1 Crit ´erio de paragem aprendizagem ativa . . . 8
1.5 Tipos de implementac¸ ˜ao dos algoritmos . . . 10
1.5.1 Implementac¸ ˜ao Off-line . . . 10
1.5.2 Implementac¸ ˜ao On-line . . . 10
1.6 Organizac¸ ˜ao da dissertac¸ ˜ao . . . 10
1.7 Contribuic¸ ˜oes . . . 12
1.8 Resumo . . . 13
2 Estado da Arte 15 2.1 Introduc¸ ˜ao . . . 15
2.2 M ´etodos baseados na representac¸ ˜ao no tempo – Avaliac¸ ˜ao das amplitudes dos
sinais . . . 16
2.3 M ´etodos baseados em an ´alises Multi-resoluc¸ ˜ao e a sua combinac¸ ˜ao com outros m ´etodos . . . 20
2.4 M ´etodos sem aplicac¸ ˜ao de intelig ˆencia computacional . . . 22
2.5 M ´etodos Recursivos . . . 23
2.6 M ´etodos baseados em Redes Neuronais Artificiais . . . 25
2.7 Resumo . . . 33
3 M ´aquina de Vetores de Suporte 35 3.1 Introduc¸ ˜ao . . . 35
3.2 Caracter´ısticas da SVM . . . 36
3.3 Hist ´oria e Teoria de Base . . . 37
3.4 A ideia fundamental . . . 37
3.5 Noc¸ ˜oes b ´asicas da teoria de aprendizagem estat´ıstica . . . 38
3.5.1 A teoria da aprendizagem estat´ıstica . . . 38
3.5.2 A Dimens ˜ao de Vapnik – Chervonenkis . . . 40
3.6 Minimizac¸ ˜ao do Risco Estrutural . . . 40
3.7 M ´aquina de Vetores de Suporte . . . 42
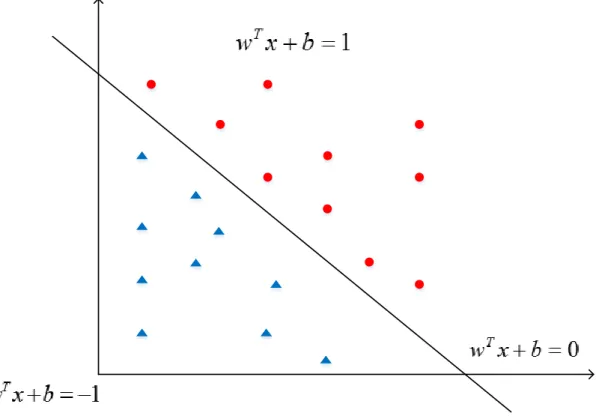
3.7.1 Classificador SVM Linear . . . 42
3.7.2 Determinac¸ ˜ao do Hiperplano ´Otimo . . . 44
3.7.3 Hiperplano ´otimo para padr ˜oes n ˜ao-separ ´aveis . . . 49
3.7.4 Classificador SVM n ˜ao linear . . . 52
3.8 O algoritmo Kernel-Adatron . . . 54
3.9 Considerac¸ ˜oes Finais . . . 55
3.10 Resumo . . . 56
4 Aplicac¸ ˜oes de t ´ecnicas de intelig ˆencia computacional para ´a detec¸ ˜ao s´ısmica 57 4.1 Introduc¸ ˜ao . . . 58
4.2 Detetor s´ısmico baseado em rede neuronal . . . 58
4.2.1 Procedimento Experimental . . . 60
4.2.2 M ´etodos de Treino e resultados . . . 65
4.3 Comparac¸ ˜ao dos resultados obtidos com o Sistema de Detec¸ ˜ao ao N´ıvel da Estac¸ ˜ao S´ısmica em Funcionamento no CND . . . 67
4.3.1 Considerac¸ ˜oes sobre o sistema de avaliac¸ ˜ao atualmente em utilizac¸ ˜ao
nas estac¸ ˜oes s´ısmicas . . . 67
4.4 Operac¸ ˜ao On-Line de um Detetor S´ısmico Inteligente . . . 68
4.4.1 Aplicac¸ ˜ao do sistema de janela deslizante . . . 68
4.5 Resumo . . . 69
5 Procedimento Experimental e Resultados 71 5.1 Introduc¸ ˜ao . . . 72
5.2 Dados Utilizados . . . 72
5.2.1 Dados Funcionamento Off-line . . . 72
5.2.2 Normalizac¸ ˜ao dos dados . . . 73
5.3 Classificac¸ ˜ao em Off-line . . . 74
5.3.1 Resultados com o detetor PESTR . . . 74
5.3.2 Resultados com o detetor PVAQ . . . 76
5.4 Classificac¸ ˜ao em On-line . . . 77
5.4.1 Normalizac¸ ˜ao dos dados . . . 77
5.5 Resultados PESTR-2008 . . . 77
5.5.1 Resultados On-line com o detetor PESTR . . . 78
5.6 Resultados PVAQ-2008 . . . 79
5.6.1 Resultados On-line com o detetor PVAQ . . . 79
5.7 Tempo de Detec¸ ˜ao s´ısmica . . . 80
5.7.1 Tempo de Detec¸ ˜ao com o detetor PESTR . . . 80
5.7.2 Tempo de Detec¸ ˜ao com o detetor PVAQ . . . 82
5.8 Sistemas de detec¸ ˜ao considerando os v ´arios detetores implementados . . . 84
5.8.1 Resultados considerando v ´arios detetores . . . 85
5.9 Discuss ˜ao dos Resultados . . . 87
5.10 Resumo . . . 88 6 Conclus ˜ao 89 6.1 Introduc¸ ˜ao . . . 89 6.2 Contribuic¸ ˜oes . . . 89 6.3 Limitac¸ ˜oes . . . 90 6.4 Trabalho Futuro . . . 91 6.5 Resumo . . . 91
A Informac¸ ˜oes Adicionais 93
A.1 Rede de Vigil ˆancia S´ımica . . . 93
Lista de Tabelas
4.1 Par ˆametros da estac¸ ˜ao s´ısmica PVAQ na REDE S´ISMICA PORTUGUESA . . . 60
4.2 Resultados primeira experi ˆencia Off-line com MLP, dados PVAQ . . . 66
4.3 Resultados primeira experi ˆencia Off-line com MLP, dados PVAQ . . . 66
4.4 Resultados experi ˆencia On-line com dados PVAQ . . . 69
4.5 Par ˆametros da estac¸ ˜ao s´ısmica PESTR na REDE S´ISMICA PORTUGUESA . . 69
4.6 Resultados experi ˆencia On-line com dados PVAQ . . . 69
5.1 Resultados obtidos aplicando aprendizagem ativa PESTR-2009. (SCALE) . . . 74
5.2 Resultados obtidos aplicando aprendizagem ativa PESTR-2009. (Escalamat) . . 75
5.3 Resultados obtidos aplicando aprendizagem ativa PVAQ-2007. (SCALE) . . . . 76
5.4 Resultados obtidos aplicando aprendizagem ativa PVAQ-2007. (Escalamat) . . . 76
5.5 Performance On-line do SVM para PESTR (Escalamat) . . . 78
5.6 Performance On-line do SVM para PESTR (SCALE ) . . . 78
5.7 Performance On-line do SVM para PVAQ (Escalamat) . . . 79
5.8 Performance On-line do SVM para PVAQ (SCALE ) . . . 79
5.9 Performance conjunta Cat ´alogo PESTR . . . 85
5.10 Performance conjunta Cat ´alogo PVAQ . . . 86
5.11 Performance conjunta Cat ´alogo Geral (PVAQ + PESTR) . . . 86
5.12 Performance conjunta Cat ´alogo PESTR . . . 86
5.13 Performance conjunta Cat ´alogo PVAQ . . . 87
5.14 Performance conjunta Cat ´alogo Geral (PVAQ + PESTR) . . . 87
Lista de Figuras
1.1 Modelo de Sistema de Reconhecimento de Padr ˜oes . . . 4 1.2 Fluxograma para a classificac¸ ˜ao utilizando Aprendizagem Ativa . . . 9 2.1 Taxa de detec¸ ˜ao de XRTP e WDetect em Marc¸o 2001. . . 21 2.2 Comparac¸ ˜ao das taxas de detec¸ ˜ao (sem classificac¸ ˜ao) entre DHMM e o modelo
recursivo STA / LTA. . . 24 2.3 Performance da rede para o conjunto de dados do monte Ves ´uvio . . . 28 2.4 Performance da rede para o conjunto de dados do monte Ves ´uvio . . . 29 2.5 Esquema de uma ´arvore neuronal, correspondente 2 perceptron’s com 2 sa´ıdas
cada . . . 30 2.6 Comparac¸ ˜ao dos resultados experimentais entre RNA e IANN . . . 32 3.1 O hiperplano ´otimo, separando exemplos positivos de negativos . . . 38 3.2 Distribuic¸ ˜ao de pontos num espac¸o bidimensional . . . 41 3.3 Subconjuntos de func¸ ˜oes aninhadas, ordenados por dimens ˜ao VC . . . 41 3.4 Classificac¸ ˜ao de dados linear . . . 43 3.5 Classificac¸ ˜ao de dados linear, m ´ultiplas soluc¸ ˜oes . . . 44 3.6 Hiperplano de separac¸ ˜ao ´otimo, para padr ˜oes linearmente separ ´aveis . . . 45 3.7 Hiperplano de separac¸ ˜ao num espac¸o linearmente n ˜ao separ ´avel . . . 49 3.8 Classificac¸ ˜ao n ˜ao linear . . . 52 3.9 Mapeamento do espac¸o de entrada num espac¸o de maiores dimens ˜oes . . . 53 4.1 Extrato Cat ´alogo s´ısmico PVAQ 2008. . . 62 4.2 Extrac¸ ˜ao de segmentos de registo s´ısmico. . . 62 4.3 Segmento de registo s´ısmico e Espectrograma. . . 64 4.4 Extrac¸ ˜ao de segmentos, c ´alculo de features e construc¸ ˜ao do universo de dados. 64 5.1 Tempo de Detec¸ ˜ao para PESTR-EW (Escalonamento Escalamat). . . 80 5.2 Tempo de Detec¸ ˜ao para PESTR-EW (Escalonamento SCALE). . . 81
5.3 Histogramas das magnitudes s´ısmicas PESTR (2008). . . 82 5.4 Tempo de Detec¸ ˜ao para PESTR-EW (Escalonamento Escalamat). . . 82 5.5 Tempo de Detec¸ ˜ao para PESTR-EW (Escalonamento SCALE). . . 83 5.6 Histogramas das magnitudes s´ısmicas PVAQ (2008). . . 83 5.7 Modos de operac¸ ˜ao utilizando os v ´arios detetores desenhados. . . 84 A.1 Rede sismogr ´afica de Portugal Continental . . . 93
Lista de Abreviaturas
BP Back Propagation
CND Centro Nacional de Dados
DEP Densidade Espectral de Pot ˆencia
DOP Degree of Dolarization
ERM Empirical Risk Minimization.
EWS Early Warning System
IC Intelig ˆencia Computacional
LTA Long Time Average
MLP Multilayer Perceptron
RBF Radial Base Function
RNA Rede Neuronal Artificial
ROC Receiver Operating Characteristic
RP Reconhecimento de Padr ˜oes
SOM Self Organizing Map
SRM Structural Risk Minimization
STA Short Time Average
SVM Support Vector Machine (M ´aquina de Veto-res de Suporte)
SV Support Vector
Cap´ıtulo 1
Introduc¸ ˜ao
1.1
Objetivos
Este estudo tem por objetivo continuar a investigac¸ ˜ao da utilizac¸ ˜ao do m ´etodo de classificac¸ ˜ao utilizando M ´aquinas de Vetores de Suporte (SVM) desenvolvido em [Madureira, 2009, Ma-dureira and Ruano, 2009, 2012, Ruano and MaMa-dureira, 2011], para a classificac¸ ˜ao de da-dos s´ısmicos provenientes de estac¸ ˜oes s´ısmicas da Rede De Vigil ˆancia S´ısmica1de Portu-gal (Ap ˆendice A). Foi poss´ıvel aplicar o procedimento utilizando dados de duas estac¸ ˜oes s´ısmicas,2a estac¸ ˜ao s´ısmica de Vaqueiros (PVAQ) e a estac¸ ˜ao s´ısmica de Estremoz (PESTR). Como objetivo espec´ıfico tem-se o desenho de modelos neuronais para cada uma das estac¸ ˜oes, testados em dois modos de operac¸ ˜ao, Off-line e On-line. Ainda ´e analisado o desem-penho na tarefa de detec¸ ˜ao considerando os v ´arios detetores implementados conjuntamente. Para a validac¸ ˜ao, os resultados obtidos pelos classificadores implementados s ˜ao confrontados com os obtidos pelo sistema atualmente em uso nas estac¸ ˜oes s´ısmicas, performances obtidos nos trabalhos de base, e outros m ´etodos tradicionalmente usados para este fim.
1
Rede De Vigil ˆancia S´ısmica ´e respons ´avel por processar toda a informac¸ ˜ao de eventos s´ısmicos percet´ıveis pelo equipamento numa determinada regi ˜ao do globo [Madureira, 2009]
2A estac¸ ˜ao s´ısmica ´e a componente b ´asica de uma rede de vigil ˆancia sismogr ´afica. As estac¸ ˜oes s´ısmicas com
tecnologia mais recente s ˜ao normalmente constitu´ıdas por um sism ´ometro de banda larga e por um aceler ´ometro. A estes equipamentos de base juntam-se um digitalizador e os equipamentos necess ´arios `a transmiss ˜ao de da-dos e ao fornecimento de energia. O equipamento deve estar colocado em instalac¸ ˜oes dedicadas para o efeito. (http://www.geofisicabrasil.com/geofisicabasica/99-sismologia/14 7 -sismos- terremotos.html)
1.2
Motivac¸ ˜ao
De acordo com [Mourad, Jos ´e, and Bento Caldeira, 2008] em 17 de Abril de 1889, em Potsdam (Alemanha) foi feito o primeiro registo gr ´afico dos movimentos do solo produzidos por um sismo3 remoto (Jap ˜ao), um dos mais significativos ˆexitos da hist ´oria da sismologia. Esse fato assinala o comec¸o da sismologia experimental, a ferramenta que forneceu os meios para a compreens ˜ao do fen ´omeno s´ısmico e da estrutura do interior da Terra.
Desde a´ı, grandes avanc¸os t ˆem sido produzidos com a finalidade de construir sistemas de detec¸ ˜ao autom ´atica na an ´alise de dados s´ısmicos. Contudo essa tarefa revelou ser de grande complexidade. Para a implementac¸ ˜ao de sistemas de alerta antecipado ´e preciso con-seguir melhorias no detetor a funcionar ao n´ıvel da estac¸ ˜ao s´ısmica individual4, aumentando a fiabilidade dos resultados obtidos e diminuindo ao m ´aximo poss´ıvel o tempo de detec¸ ˜ao de eventos. Dando seguimento aos trabalhos de base [Madureira, 2009, Madureira and Ruano, 2009, 2012, Ruano and Madureira, 2011], pretende-se criar modelos neuronais que facilitam o processo autom ´atico de detec¸ ˜ao e an ´alise s´ısmica.
Na literatura existem muitos trabalhos (referidos no Cap´ıtulo 2) com essa finalidade. Em alguns casos quando ´e utilizado aprendizagem autom ´atica utilizando dados s´ısmicos, muitos autores tentam prever quando e onde acontecer ˜ao os pr ´oximos eventos s´ısmicos e qual ser ´a a magnitude do mesmo, mas como os sismos apresentam padr ˜oes que ocorrem ao longo de centenas ou mesmo milhares de anos, levando em conta a data do primeiro registo sismo-grama podemos perceber que n ˜ao h ´a dados suficientes para atingir esse objetivo [Grubert and Vuong, 2012]. Este presente trabalho, pretende detetar sismos em sinais s´ısmicos, simu-lando todo um processo de detec¸ ˜ao em modo cont´ınuo, com uma grande reduc¸ ˜ao no tempo de detec¸ ˜ao de eventos (ver Cap´ıtulo 5-Resultados), que pode ser bastante ´util em sistemas de alerta antecipado.
3
Basicamente, sismo ´e a ocorr ˆencia de uma fratura subterr ˆanea. As ondas el ´asticas geradas propagam-se por toda a Terra. As palavras sismo e terramoto s ˜ao sin ´onimas, sendo que normalmente reserva-se o uso da palavra terramoto para a classificac¸ ˜ao de grandes sismos, e para os pequenos costuma-se usar abalo s´ısmico ou tremor de terra (http://www.geofisicabrasil.com/geofisicabasica/99-sismologia/147-sismos-terremotos.html)
4No funcionamento atual, detec¸ ˜ao de um evento n ˜ao significa simplesmente que um sinal s´ısmico ´e visto numa
estac¸ ˜ao. Geralmente ´e preciso que a onda P identific ´avel seja observada acima do n´ıvel de ru´ıdo em mais estac¸ ˜oes s´ısmicas.
1.3
Conceitos B ´asicos
1.3.1 Reconhecimento de Padr ˜oes
O reconhecimento de padr ˜oes (RP) corresponde ao processo de caracterizac¸ ˜ao de dados em classes ou categorias. A identificac¸ ˜ao das classes baseia-se num conjunto de caracter´ısticas ou atributos considerados fundamentais que s ˜ao extra´ıdos das informac¸ ˜oes dispon´ıveis do problema em quest ˜ao.
O RP tem como objetivo classificar informac¸ ˜oes, baseando em conhecimentos anteriores do problema ou extra´ıdos das propriedades estat´ısticas de um conjunto de objetos; desta forma podemos dizer que o RP trata da classificac¸ ˜ao e descric¸ ˜ao de objetos5.
[Duda, Hart, and Stork, 2001], descrevem o RP como sendo o “ campo interessado no reconhecimento de regularidades significativas em ambientes ruidosos ou complexos, feito por m ´aquinas, ou a “ procura por uma estrutura em dados.”6
Um sistema de RP simples envolve normalmente: • Extrac¸ ˜ao de carater´ısticas dos objetos a classificar; • Selec¸ ˜ao das caracter´ısticas mais discriminantes; • Construc¸ ˜ao de um classificador;
Um modelo simples do sistema de RP consiste, basicamente, no sensor e no classificador. A sa´ıda do sensor ´e um conjunto de n medidas, cada uma correspondendo a um canal do sensor.
`
As medidas do sensor s ˜ao processados de forma a criar espac¸os de caracter´ısticas, sele-cionando para isso as caracter´ısticas mais discriminantes do objeto em estudo.
O classificador depois identifica com base nas caracter´ısticas e das pr ´e-especificadas clas-ses, levando sempre em considerac¸ ˜ao uma regra de classificac¸ ˜ao apropriada, a classe que o padr ˜ao pertence (Fig. 1.1).
5
Os objetos no problema de RP s ˜ao genericamente denominados de padr ˜oes e podem ser caracteres, gr ´aficos, sinais eletr ´onicos, c ´elulas em biologia, sinais biol ´ogicos, sinais biom ´edicos, imagens, pixeis, entre ou-tros. (http://www.cic.unb.br/ lamar/te073/Aulas/ReconhecimentoPadroes.pdf) .
6
Frase original, [Duda, Hart, and Stork, 2001] define it as a field concerned with machine recognition of mea-ningful regularities in noisy or complex environment.
Campo Experimental Sensor CaracterísticasExtração de Classificador
Sistema de Reconhecimento de Padrões
Medidas Características Classes
Figura 1.1: Modelo de Sistema de Reconhecimento de Padr ˜oes. Fonte: Adaptado de (http://paginas.fe.up.pt/ jmsa/recpad/)).
1.3.2 M ´etodos de Classificac¸ ˜ao
No problema de RP h ´a duas maneiras de classificar ou determinar a classe pertencente a um padr ˜ao:
1. Classificac¸ ˜ao supervisionada 2. Classificac¸ ˜ao n ˜ao supervisionada
1.3.2.1 M ´etodos de classificac¸ ˜ao supervisionados
Nos m ´etodos supervisionados a aprendizagem ´e de forma supervisionada, onde as amostras pertencentes ao conjunto de dados t ˆem as classes bem definidas.
= = {(x1, k1), (x2, k2), ...(xn, kn)} (1.1) Sendo:
xi corresponde ao padr ˜ao de ordem ı
ki representa a classe do padr ˜ao de ordem ı
n, corresponde a quantidade de padr ˜oes existentes
Dessa forma podemos dizer que a aprendizagem supervisionada envolve um treino de um conjunto de dados j ´a classificados, de onde ´e criado uma interface capaz de classificar novos dados, que definiram a performance do algoritmo ap ´os o treino.
1.3.2.2 M ´etodos de classificac¸ ˜ao n ˜ao supervisionados
No contexto de m ´etodos n ˜ao supervisionados, n ˜ao existe um ”orientador”respons ´avel. Existe um problema a modelar id ˆentico ao apresentado anteriormente Secc¸ ˜ao 1.3.2.1, por ´em os ki s ˜ao desconhecidos.
Este tipo de problema ´e analisado por exemplo na ´area conhecida por An ´alise de Agrupa-mentos7.
Neste caso a margem entre classes, ´e determinada por uma fronteira que ´e desconhecida. As classes ser ˜ao posteriormente determinadas com base nas similaridades existente entre os padr ˜oes dos conjuntos de dados. Sendo assim, o problema a ser tratado consiste n ˜ao somente na classificac¸ ˜ao propriamente dita, mas tamb ´em na pr ´opria definic¸ ˜ao das classes. Nesse problema o algoritmo tenta encontrar uma estrutura escondida em dados n ˜ao classifi-cados. A classificac¸ ˜ao ´e feita de forma autom ´atica, sem intervenc¸ ˜ao do utilizador, n ˜ao sendo utilizadas informac¸ ˜oes pr ´evias ( targets); por isso, n ˜ao necessitam de conjuntos para teste para determinar a performance da superf´ıcie de decis ˜ao constru´ıda para novos dados.
Ainda no contexto de m ´etodos de classificac¸ ˜ao podemos definir mais duas categorias bas-tantes imporbas-tantes.
1.3.2.3 M ´etodos param ´etricos
Nestes m ´etodos o conjunto de treino ´e constitu´ıdo por vari ´aveis dependentes e independen-tes conhecidas, podendo existir par ˆametros cujos valores s ˜ao desconhecidos, que podem ser determinados utilizando o conjunto de treino. Geralmente os par ˆametros do conjunto de treino t ˆem interpretac¸ ˜ao f´ısica.
1.3.2.4 M ´etodos n ˜ao param ´etricos
Neste caso existe uma aus ˆencia completa ou quase completa, de conhecimentos a priori do problema em quest ˜ao. As redes neuronais, sistemas Fuzzy, e SVM s ˜ao exemplos de clas-sificadores n ˜ao-param ´etricos8. Para o treino desses classificadores usam-se pares entrada sa´ıda, determinando a func¸ ˜ao de decis ˜ao que classificar ´a os dados de entrada em uma das dadas classes.
7An ´alise de Agrupamentos do Ingl ˆes Clustering Analysis
8Estas t ´ecnicas n ˜ao consideram informac¸ ˜ao da distribuic¸ ˜ao da populac¸ ˜ao como no caso param ´etrico; elas
dei-xam os pr ´oprios dados definirem sua pr ´opria estrutura e serem capazes de encontrar esta estrutura expl´ıcita ou implicitamente.
1.3.3 Abordagens de reconhecimento de padr ˜oes
Os principais m ´etodos ou abordagens s ˜ao:
• Abordagem estat´ıstica
S ˜ao utilizados conceitos da teoria de decis ˜ao estat´ıstica para decidir a classe que os padr ˜oes pertencem, assumindo que os padr ˜oes e classes s ˜ao caracterizados por mode-los estat´ısticos.
• Abordagem sint ´atica
A estrutura dos padr ˜oes ´e descrita usando inter-relac¸ ˜oes de caracter´ısticas descritoras b ´asicas denominadas primitivas9. Expressam os padr ˜oes em termos de primitivas e operadores unidos por regras que descrevem o relacionamento espacial entre eles.
• Abordagem neuronal ´
E uma abordagem que procura determinar um mapeamento ´otimo entre entradas e sa´ıdas inspirando em modelos de neur ´onios do c ´erebro10. As RNA assim como as t ´ecnicas estat´ısticas necessitam de um grande n ´umero de amostras para realizarem o treino de suas aproximac¸ ˜oes, j ´a as t ´ecnicas sint ´aticas necessitam apenas de um con-junto de atributos que s ˜ao constantes para cada padr ˜ao.
• Abordagem difusa
Abordagem que tem em conta o grau de incerteza por vezes inerente a caracter´ısticas e a classificac¸ ˜oes, usando a teoria dos conjuntos difusos11para modelizar esse grau de in-certeza12. De acordo com o problema em quest ˜ao, existir ˜ao t ´ecnicas que s ˜ao mais apriadas a utilizac¸ ˜ao, ou at ´e mesmos casos onde esses m ´etodos s ˜ao associados para pro-duzir melhores resultados. Utilizando as abordagens anteriores, e outras associadas aos apresentados anteriormente, as t ´ecnicas de RP t ˆem um grande leque de aplicac¸ ˜ao, po-dendo ser aplicados em ´areas cient´ıficas e tecnol ´ogicas, industriais, m ´edicas, agr´ıcolas entre outros, tentando projetar sistemas inteligentes que s ˜ao um grande desafio para a tecnologia moderna.
9http://paginas.fe.up.pt/ jmsa/recpad/) 10http://paginas.fe.up.pt/ jmsa/recpad/) 11
Conjuntos difusos do Ingl ˆes fuzzy set
12
1.4
Aprendizagem Ativa
Aprendizagem ativa ´e um termo bastante popular em aprendizagem autom ´atica (aprendizagem-m ´aquina)13onde o algoritmo seleciona inst ˆancias de dados a serem classificados, pertencen-tes ao conjunto de pertencen-teste, e os inclui no conjunto de treino.
Utilizando aprendizagem ativa geralmente espera-se que a selec¸ ˜ao de dados, e a sua repartic¸ ˜ao entre conjunto de treino e de teste, conduza a uma melhor performance no conjunto de dados global. A quantidade de dados no conjunto de treino necess ´aria para treinar um determinado m ´etodo poder ser reduzida de forma significativa [Ruano and Madureira, 2011].
Um cen ´ario t´ıpico de aprendizagem ativa, conforme descrito em [Tong and Koller, 2001], ´e constitu´ıdo pelos seguintes componentes. Os dados s ˜ao divididos, um conjunto de dados com os targets definidos X e um outro conjunto de dados U .
Geralmente s ˜ao dados que ainda n ˜ao possuem classes definidos, n ˜ao foi aplicado ainda o processo de rotulac¸ ˜ao14.
Para o problema aqui tratado esses dados correspondem a dados do conjunto de teste, contendo informac¸ ˜ao que o algoritmo ainda n ˜ao utiliza U . Ap ´os isso, existe um algoritmo de aprendizagem l que ´e treinado com dados de X, que j ´a t ˆem os targets bem definidos e uma func¸ ˜ao para a consulta q. A func¸ ˜ao de consulta q decide os casos de U (conjunto de teste) a introduzir no conjunto de treino X (em outros casos na literatura esses dados s ˜ao rotulados nessa fase), que por sua vez ser ´a utilizada para o treino do algoritmo de aprendizagem. A func¸ ˜ao de consulta q nesse caso procede da seguinte forma:
Os exemplos mal classificados do conjunto U s ˜ao incorporados no conjunto de treino X, e aleatoriamente s ˜ao retirados o mesmo n ´umero de exemplos para o conjunto de validac¸ ˜ao, excluindo os padr ˜oes que definem o fecho convexo15 determinado com a totalidade dos dados [Madureira and Ruano, 2009, Ruano and Madureira, 2011]. O procedimento ´e esquematizado na Figura 1.2. Na maioria dos casos esse procedimento ´e repetido at ´e atingir um determinado crit ´erio de paragem, sendo o procedimento iterativo.
Para o treino da SVM utilizado nesse trabalho o crit ´erio de paragem foi definido da seguinte forma:
13Aprendizagem de m ´aquina, do Ingl ˆes Machine Learning 14
ETIQUETAR definir o target, a classe a que pertence
15
Fecho convexo do Ingl ˆes Convex Hull
1.4.1 Crit ´erio de paragem aprendizagem ativa
• O Classificador obtido ´e ´otimo, ou seja o procedimento ´e repetido at ´e a obtenc¸ ˜ao de um classificador perfeito, n ˜ao havendo erros nem termos de especificidade ou sensibilidade
(R = 100% e S = 100%), tudo isso para o universo de dados em an ´alise.
• Se a performance do classificador deteriorar-se, a iterac¸ ˜ao ´e terminada.
Quando ´e aplicado aprendizagem ativa, a efici ˆencia ´e medida geralmente de duas formas. A mais popular corresponde a reduc¸ ˜ao dos dados de treino necess ´arios para obter uma determinada performance.
A segunda e a utilizada nesse trabalho ´e o aumento do desempenho para uma determinada quantidade de dados de treino.
A abordagem comum para o processo de aprendizagem ativa ´e a selec¸ ˜ao aleat ´oria de dados a incorporar nos dados de treino [Vlachos, 2004].
Determinação do Convex Hull
Verificar {R = 100% && S = 100 %} {R (atual) < R (anterior) } || S (atual)
< S (anterior) } ) Início
Universo de Dados
Particionamento Aleátorio dos Dados (Os elementos do Convex Hull pertencem obrigatoriamente ao Conjunto de Treino)
C on ju n to d e Te ste (U ) C on ju n to d e Tr ein o (X ) Treino do Classificador SVM Classifcador Ótimo Sim Consulta q Não C on ju n to d e Te ste (U ) C on ju n to d e Tr ein o (X ) Reconstrução dos Conjuntos Atualização do Classificador Elementos mal classificados O mesmo número de elementos escolhidos aleatoriamente (Os elementos pertencentes ao
Convex Hull continuam no Conjun to de treino) Avaliar desempenho nos conjuntos de treino
e de teste: TP; FP, TN, FN
Figura 1.2: Fluxograma para a classificac¸ ˜ao utilizando Aprendizagem Ativa 9
1.5
Tipos de implementac¸ ˜ao dos algoritmos
Durante a classificac¸ ˜ao das informac¸ ˜oes s´ısmicas, procedeu-se a classificac¸ ˜ao em dois mo-dos:
• Modo Off-line • Modo On-line `
E importante referir que quando utilizados os termos Off-line e On-line a refer ˆencia ´e feita a forma como o modelo ´e utilizado, depois de desenhado.
1.5.1 Implementac¸ ˜ao Off-line
A implementac¸ ˜ao Off-line implica que algoritmo trabalha com um conjunto finito de dados, cor-respondentes a segmentos que foram anteriormente extra´ıdos de um sinal s´ısmico. Esse uni-verso de dados ´e utilizado depois no desenho do classificador desenvolvido (Nas experi ˆencias, esse universo de dados ´e dividido em 40% para teste e 60% para treino).
1.5.2 Implementac¸ ˜ao On-line
Quando referida essa implementac¸ ˜ao o funcionamento pode ser entendido como em linha (tempo real). A execuc¸ ˜ao simula o funcionamento real, aplicando o classificador desenhado previamente a dados recolhidos continuamente pelo sistema de aquisic¸ ˜ao na estac¸ ˜ao s´ısmica.
1.6
Organizac¸ ˜ao da dissertac¸ ˜ao
A dissertac¸ ˜ao est ´a organizada em seis cap´ıtulos cujo conte ´udo reflete o trabalho desenvolvido. Os cap´ıtulos s ˜ao os seguintes: Introduc¸ ˜ao, Estado da Arte, M ´aquina de Vetores de Suporte, Trabalhos anteriores, Experi ˆencias e Resultados, Conclus ˜ao. Seguidamente ´e apresentado uma breve descric¸ ˜ao de cada um dos cap´ıtulos.
• Cap´ıtulo 1 – No primeiro cap´ıtulo (presente cap´ıtulo) s ˜ao apresentados os objetivos da dissertac¸ ˜ao e a motivac¸ ˜ao que levou a esse trabalho. S ˜ao tamb ´em expostos de forma re-sumida alguns conceitos b ´asicos na classificac¸ ˜ao de padr ˜oes destacando os m ´etodos de aprendizagem, o conceito de aprendizagem ativa e ainda a implementac¸ ˜ao de algoritmos On-line e Off-line. Por fim ´e apresentado a estrutura da dissertac¸ ˜ao.
• Cap´ıtulo 2 – No segundo cap´ıtulo ´e apresentado uma revis ˜ao ao estado da arte sobre o problema de classificac¸ ˜ao de dados s´ısmicos, destacando os m ´etodos mais populares e que apresentam melhores resultados.
Atualmente existe um amplo n ´umero de t ´ecnicas para o efeito, variando desde t ´ecnicas simples baseadas na raz ˜ao de energia, a m ´etodos mais sofisticados baseados no reco-nhecimento de padr ˜oes.
S ˜ao tamb ´em focados os trabalhos que utilizam t ´ecnicas baseadas em intelig ˆencia com-putacional.
`
E ainda discutido a t ´ecnica atualmente em uso nas estac¸ ˜oes s´ısmicas em Portugal ba-seado na raz ˜ao de energia STA/LTA.
• Cap´ıtulo 3 – O terceiro cap´ıtulo aborda o Classificador SVM. ´E analisada a sua formulac¸ ˜ao matem ´atica e os aspetos a ter em conta na sua implementac¸ ˜ao.
Sendo a SVM o algoritmo de base desse trabalho ´e apresentado a proposta do algo-ritmo anteriormente implementado e empregue nesta dissertac¸ ˜ao, sendo em alguns caso adaptado e feito algumas alterac¸ ˜oes de forma a obter os melhores resultados poss´ıveis. • Cap´ıtulo 4 – No quarto cap´ıtulo os trabalhos anteriores a qual essa dissertac¸ ˜ao d ´a se-guimento s ˜ao apresentados. S ˜ao apresentados os testes e as experi ˆencias realizadas de acordo com algoritmos desenvolvidos anteriormente, apresentando sempre os resul-tados e an ´alise do ponto de vista dos autores.
• Cap´ıtulo 5 – No quinto cap´ıtulo, todos os testes, experi ˆencias efetuadas s ˜ao apresenta-dos, comec¸ando por apresentar a abordagem Off-line, e de seguida utilizando o classifi-cador desenvolvido, implementac¸ ˜ao On-line.
Todas as experi ˆencias s ˜ao realizadas de acordo com o algoritmo descrito no terceiro cap´ıtulo implementado para funcionar Off-line e On-line.
• Cap´ıtulo 6 – No sexto e ´ultimo cap´ıtulo s ˜ao apresentados as conclus ˜oes, an ´alise final e sugest ˜oes.
• Ap ˆendice A – No ap ˆendice s ˜ao apresentados informac¸ ˜oes adicionais.
1.7
Contribuic¸ ˜
oes
Parte do estudo desenvolvido nessa dissertac¸ ˜ao foi utilizado para a publicac¸ ˜ao de um artigo [Ruano, Madureira, Ozias, Khosravani, Ruano, and Ferreira, 2013] intitulado,
“A Support Vector Machine Seismic Detector for Early-Warning Applications”. (keywords = early-warning systems,seismic detection,support vector machines)
Apresentado em,The 3rd IFAC International Conference on Intelligent Control and Auto-mation Science (ICONS 2013), Chengdu, China, 2-4 September 2013.
1.8
Resumo
Neste cap´ıtulo ´e feita uma introduc¸ ˜ao aos objetivos da dissertac¸ ˜ao, bem como as contribuic¸ ˜oes, e a organizac¸ ˜ao da dissertac¸ ˜ao.
Foram discutidos alguns dos aspetos relativos a construc¸ ˜ao de sistemas inteligente, primei-ramente foi analisado o problema de classificac¸ ˜ao de padr ˜oes, seguido de uma abordagem dos m ´etodos de classificac¸ ˜ao, focando na classificac¸ ˜ao supervisionada e classificac¸ ˜ao n ˜ao super-visionada. Foi tamb ´em mostrado diferentes abordagens para o problema de reconhecimento de padr ˜oes.
`
E discutido a problem ´atica de aprendizagem ativa, discutindo a sua import ˆancia e alguns aspetos a considerar na sua aplicac¸ ˜ao. Ainda foi apresentado os tipos de implementac¸ ˜ao dos algoritmos, focando nas abordagens utilizadas na realizac¸ ˜ao implementac¸ ˜oes On-line e Off-line.
Cap´ıtulo 2
Estado da Arte
Em sismologia, t ´ecnicas de intelig ˆencia computacional (IC) t ˆem sido utilizados para prever eventos s´ısmicos, controlo de estruturas civis, discriminac¸ ˜ao entre v ´arios tipos de eventos s´ısmicos, determinac¸ ˜ao das fases s´ısmicas e para a detec¸ ˜ao de sismos propriamente dito. Na pesquisa da literatura encontramos v ´arios trabalhos com resultados bastante interessan-tes tendo como principais objetivos, a detec¸ ˜ao de eventos s´ısmicos, determinac¸ ˜ao de instan-tes de chegada das fases s´ısmicas, classificac¸ ˜ao de eventos s´ısmicos de difereninstan-tes tipos ou identificac¸ ˜ao de eventos s´ısmicos artificias de origens conhecidos.
Esses estudos t ˆem em comum o fato de todos residirem no processamento de dados s´ısmicos sendo que, alguns tratam dados que j ´a foram previamente processados no sentido de identifi-carem sinal s´ısmico e outros identificam o sinal s´ısmico sem um pr ´e-processamento.
2.1
Introduc¸ ˜ao
Neste cap´ıtulo s ˜ao apresentados trabalhos com a finalidade espec´ıfica de analisar dados s´ısmicos, principalmente baseando na intelig ˆencia computacional (RNA, SVM), de forma a detetar/classificar eventos s´ısmicos.
S ˜ao apresentados n ˜ao s ´o trabalhos onde a RNA e SVM t ˆem pap ´eis de classificadores, m ´as tamb ´em, os que analisam informac¸ ˜oes s´ısmicas n ˜ao recorrendo a intelig ˆencia computacional de forma a, obter melhor compress ˜ao de dados, caracterizar ou extrair informac¸ ˜oes a partir de eventos s´ısmicos, etc.
Tamb ´em s ˜ao analisados trabalhos realizados onde a detec¸ ˜ao e classificac¸ ˜ao s ˜ao feitas de forma autom ´atica, ou seja, todo o processamento ´e feito numa s ´o fase. A maioria dos trabalhos concentram em tr ˆes dom´ınios, a detec¸ ˜ao de pequenos sinais s´ısmicos, identificac¸ ˜ao das fases s´ısmicas e a discriminac¸ ˜ao entre sismos naturais e sismogramas de explos ˜oes artificiais.
2.2
M ´etodos baseados na representac¸ ˜ao no tempo – Avaliac¸ ˜ao
das amplitudes dos sinais
Numa rede de estac¸ ˜oes s´ısmicas ou numa estac¸ ˜ao s´ısmica independente s ˜ao produzidas grandes quantidades de informac¸ ˜oes que muitas vezes s ˜ao dif´ıceis de analisar em tempo real. Com a introduc¸ ˜ao da aquisic¸ ˜ao digitalmente de dados s´ısmicos, longos per´ıodos de gravac¸ ˜oes e grandes quantidades de dados s´ısmicos a armazenar, tornaram-se problemas de car ´acter t ´ecnico. Para tornar mais eficaz todo o processo de recolha, processamento e armazena-mento de dados, grande parte das estac¸ ˜oes s´ısmicas utilizam algoritmos baseados num modo de ativac¸ ˜ao. Um algoritmo de ativac¸ ˜ao permite detetar sinais s´ısmicos sempre que um suposto estado ´e alcanc¸ado, deixando esse estado quando o algoritmo declara o fim do evento.
Foram desenvolvidos v ´arios algoritmos com essa finalidade, um dos mais famosos que emergiu dessa linha de pensamento foi [Stewart, 1977], este sistema ao n´ıvel da estac¸ ˜ao s´ısmica tanto pode funcionar atrav ´es de software instalado no sistema de aquisic¸ ˜ao, ou ser implementado no pr ´oprio sistema. De referir que este detetor ´e usado na maioria das redes s´ısmicas internacionais, sendo standard para a rede s´ısmica nacional (Portugal). O sis-tema autom ´atico de detec¸ ˜ao proposto em [Stewart, 1977] aplica um algoritmo STA/LTA que regista todas as mudanc¸as de amplitudes dos ru´ıdos s´ısmicos localmente na estac¸ ˜ao, e auto-maticamente ajusta a sensibilidade da estac¸ ˜ao para o n´ıvel atual de ru´ıdo.
Os c ´alculos geralmente s ˜ao executados repetidamente em tempo real e de forma indepen-dente, ou seja, em todos os canais do registo s´ısmico os dados s ˜ao analisados. O algoritmo STA/LTA processa sinais s´ısmicos em duas janelas de tempo, uma de curta durac¸ ˜ao (STA) e outra de longa durac¸ ˜ao (LTA).
O STA mede a amplitude instant ˆanea do sinal, valor atual das ´ultimas amostras processa-das e procura identificar sismos. O LTA cuida da m ´edia atual da amplitude do ru´ıdo s´ısmico. Primeiramente a amplitude absoluta de cada uma das amostras de dados do sinal de entrada ´e determinado. Seguidamente a m ´edia das amplitudes absolutas em ambas as janelas s ˜ao cal-culadas. Num passo adicional a proporc¸ ˜ao de ambos os valores, STA/LTA (ratio) ´e calculado. Essa raz ˜ao ´e continuamente comparada com o valor limite definido pelo utilizador, STA/LTA n´ıvel de decis ˜ao.
Geralmente a transic¸ ˜ao d ´a-se depois do in´ıcio do evento, por vezes a transic¸ ˜ao acontece perante a ocorr ˆencia da fase S, normalmente onde encontra-se mais energia. Por outro lado o abandono desse estado ´e antes do final do evento. De forma a garantir o registo da totalidade do evento, ´e preciso ajustar de forma ´otima alguns par ˆametros do trigger, tais como:
• Janela de durac¸ ˜ao do STA • Janela de durac¸ ˜ao do LTA
• STA/LTA (trigger -N´ıvel de decis ˜ao) • STA/LTA (de - trigger -N´ıvel de decis ˜ao) • Frequ ˆencia de corte do filtro passa-banda
Mesmo com esses par ˆametros definidos de forma ´otima, ainda ´e preciso levar em conta o fato da rede s´ısmica n ˜ao depender exclusivamente desses par ˆametros, existem par ˆametros adicionais associados que s ´o bem sintonizados permitem um ´otimo registo de dados. De entre esses par ˆametros associados, destacam-se a mem ´oria pr ´e-vento (PEM) e a mem ´oria p ´os-evento (PET).
A definic¸ ˜ao dos par ˆametros do trigger e os par ˆametros associados dependem, do objetivo da aplicac¸ ˜ao, das condic¸ ˜oes do ru´ıdo no local, das propriedades do sismo no local a considerar e do tipo de sensor usado.
Por isso n ˜ao existe uma regra gen ´erica na definic¸ ˜ao dos mesmos. Esses par ˆametros quase nunca s ˜ao ´otimos, sendo assim devem ser ajustados de forma gradual at ´e encontrar uma configurac¸ ˜ao que melhor ajusta ao caso em estudo. Em geral, procura-se minimizar o n ´umero de falsos alarmes, e minimizar o n ´umero de n ˜ao detec¸ ˜oes.
Ao n´ıvel da estac¸ ˜ao s´ısmica geralmente esses detetores apresentam uma performance razo ´avel, analisados de forma independente mas no contexto de rede s´ısmica o desempenho global do sistema ´e bastante maior. No entanto, o detetor STA/LTA cl ´assico apresenta algumas limitac¸ ˜oes, como o facto de n ˜ao identificar eventos s´ısmicos irreconhec´ıveis no espac¸o de sinal, a aus ˆencia de m ´etodos para determinar o comprimento do sinal, etc.
Num esquema semelhante ao anterior, [Stewart, 1977] utilizou um envelope de dados (M DX), modificados a partir da derivada dos dados em que as alterac¸ ˜oes na inclinac¸ ˜ao do sinal s ˜ao enfatizadas. Os valores M DX s ˜ao encontrados primeiramente por estimativa da derivada (DX), nos i pontos consecutivos.
DXi = Xi− Xi−1 (2.1)
Se o sinal da DX for constante durante menos de 8 valores consecutivos de i, ent ˜ao,
M DXi = M DXi + DXi−1 (2.2)
Caso contr ´ario,
M DXi = DXi (2.3)
A s ´erie de tempo resultante ´e uma realizac¸ ˜ao passa alto dos dados, onde o primeiro movimento oscilat ´orio e a natureza dos dados s ˜ao preservados e os sinais emergentes melhorados. Ap ´os isso, um conjunto de crit ´erios de detec¸ ˜ao e limites devem ser atendidos para declarar um evento.
[Allen, 1978] desenvolveu um detetor baseado num envelope que corresponde, ao qua-drado de dados mais o quaqua-drado da primeira derivada. Com isso conseguiu criar uma s ´erie de tempo, que inclu´ı componentes de dados filtrados e n ˜ao filtrados. O fluxo de dados processa-dos ´e ent ˜ao submetido a uma s ´erie de testes l ´ogicos e matem ´aticos para a identificac¸ ˜ao das fases e temporizac¸ ˜ao.
Baseando no crit ´erio de energia transit ´orio STA/LTA e envolventes dos sinais, [Patan `e and Ferrari, 1999] implementaram um algoritmo que permite a detec¸ ˜ao e localizac¸ ˜ao de sismos locais. O algoritmo de detec¸ ˜ao utiliza uma func¸ ˜ao caracter´ıstica baseada na envolvente do sinal, que depois ´e submetida a um detetor cl ´assico STA/LTA. Fazendo uso de sistemas que operam em mainframes com uma boa capacidade de aquisic¸ ˜ao e processamento de dados conjuntamente com pacotes de software complexos para a an ´alise autom ´atica e iterativa de dados s´ısmicos, s ˜ao aplicadas an ´alises espetrais e de polarizac¸ ˜ao para identificar instantes de chegada das fases S e P.
[Sleeman and van Eck, 1999] propuseram um sistema para a detec¸ ˜ao autom ´atica dos ins-tantes de chegada da fase P do sinal s´ısmico. Determinaram o inicio do sinal atrav ´es, da auto-regress ˜ao do sinal e do ru´ıdo, aplicando um crit ´erio denominado de Aikake Information Criterion utilizando o tempo de in´ıcio como par ˆametro.
A detec¸ ˜ao consiste em duas etapas:
• Estimativa do in´ıcio do evento s´ısmico atrav ´es do detetor STA/LTA. • Estimativa grosseira do instante de chegada da fase pelo detetor de fase.
O objetivo principal dos autores era fornecer rapidamente e de forma correta a localizac¸ ˜ao dos sismos com magnitude superior a 5.0, permitindo determinar de forma autom ´atica e confi ´avel o hipocentro. Este sistema chamado de AR-AIC foi testado com sucesso e permitiu fornecer informac¸ ˜oes de detecc¸ ˜oes precisas de forma autom ´atica num grande conjunto de dados ex-perimentais. Conseguiram taxas de detec¸ ˜oes de 71%, e uma diferenc¸a m ´edia com detec¸ ˜oes manuais de 0,1 segundos.
de algoritmos para a detec¸ ˜ao e identificac¸ ˜ao de fases s´ısmicas, de forma autom ´atica base-ando no trigger. Os algoritmos analisados foram, STA/LTA, z-estat´ıstico, frequ ˆencia transit ´oria, polarizac¸ ˜ao, etc. Conclu´ıram que nenhum foi claramente ´otimo em todas as condic¸ ˜oes de, origem, recepc¸ ˜ao, ru´ıdo entre outros. O algoritmo STA/LTA foi o melhor computacionalmente, e forneceu melhores resultados em comparac¸ ˜ao com outros algoritmos.
[Sharma, Kumar, Mittal, and Shamshi, 2006] desenvolveram e implementaram um algo-ritmo STA/LTA, para gravac¸ ˜ao de 16-bit de dados s´ısmicos, usando um microprocessador 80C85 e os seus perif ´ericos. Testaram o instrumento no laborat ´orio e tamb ´em no campo para per´ıodos de longa durac¸ ˜ao. Para o valor de LTA muito grande, houve um problema de overflow. Implementaram o instrumento para garantir que n ˜ao existam perdas de informac¸ ˜oes ap ´os a declarac¸ ˜ao de um evento positivo. Gravaram dados de pr ´e-eventos, evento e p ´os-evento de forma sucessiva durante semanas, permitindo obter toda a informac¸ ˜ao relativamente a r ´eplicas ap ´os o evento principal. O di-triggering foi inclu´ıdo no STA/LTA desenvolvido por [Kumar, Sharma, Sharma, and Shamshi, 2009], durante o desenvolvimento do Sistema de aquisic¸ ˜ao de dados s´ısmicos, baseado na arquitetura de um PC de 24-bit. O algoritmo calcula a raz ˜ao entre o STA e LTA para descriminar entre eventos positivos e negativos. Incorporaram sistema de tempo baseado em GPS para manter o tempo mais preciso. Na metodologia para a detec¸ ˜ao de eventos s´ısmicos, o c ´alculo de STA e LTA, s ˜ao realizados em tempo real. Primeiro amplitudes absolutas de cada amostra de dados do sinal de entrada s ˜ao calculadas. Depois m ´edia da amplitude absoluta ´e determinada e, em seguida, adicionado ao c ´alculo do valor LTA. Ap ´os o c ´alculo do valor de LTA, um novo valor STA ´e determinado. Depois a m ´edia STA/LTA corrente ´e comparado com valor do trigger programado para a detec¸ ˜ao de evento s´ısmico. Se o valor calculado n ˜ao cumprir os crit ´erios de disparo ent ˜ao LTA ´e atualizado como:
LT A = LT A − primeirovalorST A + valorcorrenteST A (2.4) ´
E calculado o novo valor STA e comparado com o trigger. Se o evento ´e negativo, o valor LTA ´e atualizado. No caso de evento positivo, o valor LTA ´e guardado para c ´alculos. A raz ˜ao entre o LTA guardado e valores correntes de STA ´e comparada com o valor de di-trigger (programado pelo utilizador) para declarar final do evento s´ısmico.
2.3
M ´etodos baseados em an ´alises Multi-resoluc¸ ˜ao e a sua combinac¸ ˜ao
com outros m ´etodos
[Botella, Rosa-Herranz, Giner, Molina, and Galiana-Merino, 2003] desenvolveram um detetor s´ısmico (WDetect), em tempo real, baseado na raz ˜ao STA/LTA com pr ´e-filtragem por wavelets (DWT), aumentando a taxa de detec¸ ˜ao e reduzindo os falsos alarmes em contraste com outros detetores s´ısmicos. Este detetor foi capaz de registar sinais recebidos em modo cont´ınuo de todas as estac¸ ˜oes da rede s´ısmica (Alicante no Sudoeste de Espanha). Ap ´os aplicarem a DWT, reconstruiram o sinal com base na transformada inversa de wavelet (IDWT), mas apenas utilizando os coeficientes de alguns n´ıveis selecionados. O algoritmo funciona do seguinte modo:
1. O sinal ´e filtrado por um filtro, diferencial de, 1oordem
dx(n) = [x(n) − x(n − 1)], onde x(n) representa o sinal de entrada (2.5) 2. A raz ˜ao STA/LTA ´e calculada de forma recursiva como:
ST A(n) = ST A(n − 1) + (dx(n) − ST A(n − 1) Tsta
(2.6)
Onde T sta s ˜ao as respetivas janelas usadas para calcular a m ´edia STA e LTA. O limiar m´ınimo para LTA ´e sempre definido como sendo o LTA no limite m´ınimo.
LT A(n) = LT A(n − 1) + ST A(n) − ST A(n − 1) Tlta
(2.7)
3. O Valor do trigger (α(n)), para eventos positivos ´e dado:
α(n) = f racdx(n)LT A(n) (2.8)
Quando α(n) ´e excedido um trigger ´e declarado e a predic¸ ˜ao entra no estado (2). De seguida o valor LTA da amostra ´e guardado como preLT A, para c ´alculos do trigger na etapa 2. O preLT A corresponde ao ´ultimo valor LTA calculado.
No estado 2, se o valor limite for maior ou igual a ST A(n)/preLT A ent ˜ao, um evento ´e declarado positivo, dando inicio a gravac¸ ˜ao dos dados s´ısmicos, caso contr ´ario ´e retornado a etapa 1. Obtiveram uma melhoria na detec¸ ˜ao s´ısmica, como podemos confirmar com Figura 2.1, onde XDetect (Tottingham e Lee, 1989) e XRTP (Tottingham,1994).
Figura 2.1: Taxa de detec¸ ˜ao de XRTP e WDetect em Marc¸o 2001. Fonte: [Botella, Rosa-Herranz, Giner, Molina, and Galiana-Merino, 2003]
Na validac¸ ˜ao do sistema a taxa de detec¸ ˜oes corretas foi de 97.4% e de falsos alarmes de 72.8% melhorando significativamente o sistema em funcionamento. Consideraram o resultado desse algoritmo melhor do que o do simples STA/LTA algoritmo [Stewart, 1977]. Entretanto esse algoritmo n ˜ao conseguiu identificar alguns eventos, onde a amplitude do sinal foi reduzido ap ´os aplicar a pr ´e-filtragem por wavelets.
Num esquema parecido ao anterior, [Baranov, 2007] analisou v ´arias formulac¸ ˜oes de detec¸ ˜oes de eventos s´ısmicos, apresentando raz ˜oes da inefici ˆencia na formulac¸ ˜ao cl ´assica e por fim prop ˜oe uma formulac¸ ˜ao adequada para o problema no espac¸o-tempo frequ ˆencia. [Baranov, 2007] aplicou a transformada de wavelet ao sinal s´ısmico antes da submiss ˜ao ao detetor STA/LTA. Com a aplicac¸ ˜ao da DWT determinou o comprimento do sinal s´ısmico e utilizando a expans ˜ao do sismograma, num pacote de ondas, eliminou as defici ˆencias do sistema padr ˜ao permitindo a detec¸ ˜ao de eventos s´ısmicos com baixa relac¸ ˜ao sinal ru´ıdo(SNR).
Do ponto de vista do autor, os m ´etodos cl ´assicos requerem pequenos c ´alculos, o que con-siderou uma vantagem para a sua utilizac¸ ˜ao em sistemas de tempo real, mas por outro lado, a sua inaplicabilidade na determinac¸ ˜ao da durac¸ ˜ao de um evento e sua indiferenc¸a a composic¸ ˜ao do sinal s ˜ao desvantagens, pelo que com a transformada wavelet, as desvantagens apontadas acima podem ser completamente removidas.
Para a eliminac¸ ˜ao dos problemas, o conceito de um envelope cumulativo do r ´acio STA/LTA foi introduzido, e um crit ´erio de determinac¸ ˜ao do comprimento do sinal s´ısmico proposto. Para aumentar a sensibilidade do detetor STA/LTA, procurou na representac¸ ˜ao do sinal no espac¸o de frequ ˆencia/tempo, fazer a decomposic¸ ˜ao do registo em pacotes de wavelets, apresentando v ´arias vantagens em comparac¸ ˜ao com os demais tipos de filtragem. O m ´etodo consistiu no c ´alculo da relac¸ ˜ao STA/LTA, utilizando a decomposic¸ ˜ao dos conjuntos de wavelet das compo-nentes verticais do sismograma digital. Com isso conseguiu a detec¸ ˜ao de eventos s´ısmicos
que eram irreconhec´ıveis para o detetor STA/LTA cl ´assico. Os principais par ˆametros do algo-ritmo foram uma wavelet com um suporte compacto, e um detetor STA/LTA.
2.4
M ´etodos sem aplicac¸ ˜ao de intelig ˆencia computacional
[Joswig, 1990] implementou um detetor que utiliza ultrassonografias (detetor de ultrassom), para a construc¸ ˜ao de modelos gr ´aficos na base de eventos s´ısmicos normalizados para a amplitude do ru´ıdo. Estes padr ˜oes s ˜ao ent ˜ao comparados com os padr ˜oes de refer ˆencia pre-definidos (correspondendo a ambos os eventos s´ısmicos e ru´ıdo) que s ˜ao deslocados ao longo da ecografia de forma semelhante ao processamento da janela de ultrassom, em cada etapa a medida de similaridade entre o segmento de ultrassom e o padr ˜ao de refer ˆencia ´e calculada. Este processo ´e repetido para todos os padr ˜oes de refer ˆencia dispon´ıveis. O padr ˜ao mais semelhante ´e atribu´ıdo ao sinal analisado, e se a medida de similaridade exceder um certo limite, o segmento correspondente ´e declarado para ser detetado. O tipo de sinal detetado coincide com o tipo padr ˜ao de refer ˆencia atribu´ıdo. Al ´em disso, este m ´etodo tornou poss´ıvel determinar a durac¸ ˜ao de eventos s´ısmicos (comprimento do segmento do registo digital), que correspondia ao comprimento do padr ˜ao de refer ˆencia.
Numa nova abordagem, [Massa, Ferretti, Spallarossa, and Eva, 2006] melhoraram o de-sempenho de um procedimento autom ´atico empregado para um sistema ”quase em tempo real”, para a localizac¸ ˜ao de eventos s´ısmicos no Sudoeste de It ´alia. Para isso, desenvolve-ram um processo baseado na an ´alise da similaridade de forma de onda usando apenas uma estac¸ ˜ao s´ısmica. Para detetar ”earthquake families”, utilizaram uma t ´ecnica de correlac¸ ˜ao cruzada num conjunto de ondas s´ısmicas registadas no per´ıodo de 1985-2002, numa regi ˜ao localizada no sudoeste dos Alpes (It ´alia). Utilizaram cerca de 2700 eventos s´ısmicos, selecio-nados com base na relac¸ ˜ao sinal ru´ıdo(SNR).
Com a an ´alise da similaridade da forma de onda, conseguiram classificar cerca de 65% dos eventos selecionados em 80 grupos earthquake families, localizados dentro da ´area con-siderada. Para cada grupo fizeram a selec¸ ˜ao de um membro principal, representante que foi relocalizado manualmente.
Depois com a correlac¸ ˜ao cruzada com os elementos dos grupos, determinaram o grupo a que pertence cada novo evento a ser processado, e por fim atribuem a localizac¸ ˜ao do repre-sentante do grupo ao novo elemento. Em relac¸ ˜ao a performance, de 104 eventos 50% das associac¸ ˜oes foram feitas corretamente.
Novamente fazendo uso da correlac¸ ˜ao de forma de onda, [Gibbons and Ringdal, 2006] explicaram a detec¸ ˜ao de eventos s´ısmicos de baixas magnitudes. Disseram que sinais de
pequenos eventos s ˜ao mais efetivamente detetados pela correlac¸ ˜ao cruzada do fluxo de da-dos de entrada com modelos de forma de onda. Disseram que sinais de pequenos eventos s ˜ao mais efetivamente detetados pela correlac¸ ˜ao cruzada do fluxo de dados de entrada com modelos de forma de onda.
[Kueperkoch, Meier, Lee, Friederich, and Grp, 2010] presentaram um algoritmo autom ´atico para determinar, o tempo de chegada da fase S de eventos, locais, regionais e telessismos, baseando-se na previs ˜ao autorregressiva (AR) da onda. As formas de ondas das compo-nentes horizontais foram previstas usando um modelo escalar AR para gravac¸ ˜oes de v ´arias componentes. Estimaram os coeficientes de AR de uma pequena janela em movimento utili-zando, uma abordagem de m´ınimos quadrados, minimizando o erro de predic¸ ˜ao para a frente. Fizeram testes sint ´eticos com um ´unico componente de dado, mostrando que a abordagem de m´ınimos quadrados produz resultados semelhantes, ou mesmo melhores do que algoritmos YuleWalker e algoritmos Burgs.
Discutiram a escolha do modelo de AR e mostraram que o erro de predic¸ ˜ao, correspon-dente ao modelo de AR aplicado a ambas as componentes horizontais ´e suficiente para detetar mudanc¸as instant ˆaneas em amplitude, fase, frequ ˆencia e polarizac¸ ˜ao. O erro de predic¸ ˜ao(rms) de ambas as componentes horizontais definiu a func¸ ˜ao caracter´ıstica aplicada no algoritmo para estimar o tempo de chegada da fase. O algoritmo proposto ´e tamb ´em respons ´avel pela avaliac¸ ˜ao autom ´atica da qualidade dos tempos de chegada estimados. Quatro crit ´erios de qualidade foram usados para definir automaticamente o peso do tempo de chegada estimado, basearam-se em duas estimativas diferentes da inclinac¸ ˜ao da func¸ ˜ao caracter´ıstica, e em duas relac¸ ˜oes sinal ru´ıdo (SNR).
2.5
M ´etodos Recursivos
[Beyreuther and Wassermann, 2008a] apresentaram uma nova t ´ecnica para a da detec¸ ˜ao au-tom ´atica e classificac¸ ˜ao de eventos s´ısmicos numa ´unica etapa. Utilizaram os modelos ocultos de Markov (HMM) uma t ´ecnica originalmente desenvolvida para o problema de reconheci-mento de voz mas muito prometedora em relac¸ ˜ao a detec¸ ˜ao de eventos s´ısmicos induzidos pelo vulc ˜ao de acordo com [Beyreuther and Wassermann, 2008b].
Analisaram a sua utilizac¸ ˜ao, num conjunto cont´ınuo e limitado de dados, da rede s´ısmica de Bavaria. No final, apresentaram uma comparac¸ ˜ao dos resultados obtidos com os obtidos pelas t ´ecnicas de detec¸ ˜ao simples, como por exemplo o STA/LTA. De forma geral, consideraram o desempenho dos modelos ocultos de Markov discretos (DHMM), como sendo bom para tarefas de classificac¸ ˜ao pr ´e-trigger e apresentaram resultados razo ´aveis nas classificac¸ ˜oes no modo
cont´ınuo. Em relac¸ ˜ao a performance do DHMM, comparando o com um detetor STA/LTA, apresentaram a seguinte tabela, como podemos ver na figura seguinte:
Figura 2.2: Comparac¸ ˜ao das taxas de detec¸ ˜ao (sem classificac¸ ˜ao) entre DHMM e o modelo recursivo STA / LTA no per´ıodo de um m ˆes de forma cont´ınua.Fonte: [Beyreuther and Wasser-mann, 2008a]
[Beyreuther, Carniel, and Wassermann, 2008] para problema de detec¸ ˜ao e classificac¸ ˜ao de eventos, s´ısmicos vulc ˆanicos/tect ´onicos na ilha de Tenerife, adotaram novamente metodo-logias de reconhecimento de fala. Como uma das motivac¸ ˜oes tinham a similaridade existente entre sinais sismogramas e sinais de fala. Nesse artigo, usaram HMM para detetar/classificar eventos s´ısmicos a partir de dados s´ısmicos registados de forma cont´ınua. Com os HMM conseguiram boas taxas de detec¸ ˜oes e relac¸ ˜oes sinal ru´ıdo (iterac¸ ˜ao entre o ru´ıdo s´ısmico vulc ˆanico e tect ´onico), por isso consideram o sistema como sendo uma boa opc¸ ˜ao para sistemas de alerta antecipada(EWS). Analisaram resultados de um per´ıodo de classificac¸ ˜ao cont´ınuo de 1 m ˆes comec¸ando em, 1 de Setembro de 2004 e terminando em 30 de Setembro de 2004. Conseguiram 74% de classificac¸ ˜oes corretas e 24% de classificac¸ ˜oes erradas.
Num novo estudo, [Beyreuther, Hammer, Wassermann, Ohrnberger, and Megies, 2012], apresentaram o projeto de um detetor s´ısmico probabil´ıstico que opera numa ´unica estac¸ ˜ao s´ısmica. Apesar de limitac¸ ˜oes, o desempenho do m ´etodo desenvolvido foi pouco menor que o baseado na raz ˜ao STA/LTA, a partir de informac¸ ˜oes de tr ˆes ou mais estac¸ ˜oes. O detetor desenvolvido ofereceu uma alternativa valiosa e promissora, apresentando uma arquitetura probabil´ıstica baseada no HMM. Na an ´alise apresentada em [Beyreuther, Hammer, Wasser-mann, Ohrnberger, and Megies, 2012] sabendo que a detec¸ ˜ao de eventos s´ısmicos de fluxos cont´ınuos de dados s´ısmicos, ser uma das quest ˜oes chaves para um sistema s´ısmico de mo-nitoramento autom ´atico ou semiautom ´atico, geralmente as redes s´ısmicas s ˜ao constitu´ıdas por um conjunto de pequenas estac¸ ˜oes, a maioria com algoritmos baseados nos n´ıveis de de-cis ˜ao implementados em grandes n ´umeros de estac¸ ˜oes ativas. Sendo assim, para o caso de algumas estac¸ ˜oes n ˜ao estarem dispon´ıveis, ou ocorrerem eventos pequenos, por exemplo em monitorizac¸ ˜ao de vulc ˜oes ou estac¸ ˜oes hidrot ´ermicas, esses algoritmos baseados nos n´ıveis de decis ˜ao frequentemente apresentam elevados n ´umeros de falsos alarmes, por isso algoritmos de detec¸ ˜ao, que mostram um desempenho razo ´avel ao operarem mesmo numa ´unica estac¸ ˜ao
s´ısmica s ˜ao de bastante interesse.
2.6
M ´etodos baseados em Redes Neuronais Artificiais
A identificac¸ ˜ao correta de eventos s´ısmicos continua a ser um aspeto cr´ıtico, para a confia-bilidade na an ´alise de dados s´ısmicos de forma autom ´atica permitindo projetar sistemas em tempo real. A classificac¸ ˜ao de sinais s´ısmicos tem sido tratada em quase todos os casos como sendo um processo de duas etapas. A tarefa ´e dividida, no problema de detec¸ ˜ao simples e seguidamente, no problema de caracterizac¸ ˜ao dos segmentos de tempo detetados em classes de eventos, como podemos confirmar nos trabalhos descritos de seguida.
V ´arios trabalhos t ˆem como finalidade detetar diferentes tipos de eventos s´ısmicos com base nas caracter´ısticas apresentadas por cada um, principalmente identificar sismos de origem natural e explos ˜oes artificiais.
[Dowla, Taylor, and Anderson, 1990] aplicaram uma RNA para descriminar entre eventos s´ısmicos naturais e explos ˜oes artificiais, usando dist ˆancias corrigidas de informac¸ ˜oes espetrais das fases (Pg, Pn, Lg) de eventos s´ısmicos regionais. Implementaram a RNA na estac¸ ˜ao de trabalho usando uma MLP com o algoritmo backpropagation (BP), com uma estrutura simples (82 unidades de entrada, 1 unidade escondida, 2 unidades de sa´ıda). Atribu´ıram uma rede neuronal para cada estac¸ ˜ao s´ısmica de forma a regionalizar os dados. Para cada estac¸ ˜ao regional obtiveram um reconhecimento de 93% de sismos e explos ˜oes. J ´a para uma rede de 4 estac¸ ˜oes obtiveram um desempenho de mais de 97%.
[Wang and Teng, 1995] estudaram duas RNAs supervisionadas que diferem entre si nos tipos de entradas, no primeiro caso utilizaram a raz ˜ao STA/LTA como entrada da rede, no outro caso utilizaram espectrogramas.
Em relac¸ ˜ao a resultados mostraram que a precis ˜ao das RNAs ´e melhor que os algoritmos convencionais (STA/LTA), especialmente para sinais com baixa SNR ou ru´ıdos em forma de picos. Com as experi ˆencias comprovaram que estes sistemas superam em desempenho os algoritmos baseados no n´ıvel de decis ˜ao STA/LTA.
Novamente fazendo uso das RNAs, [Wang and Teng, 1997] estudaram a aplicac¸ ˜ao de uma MLP para a determinac¸ ˜ao dos instantes de chegada da fase S em sismos locais e regionais. Usaram dados produzidos por uma estac¸ ˜ao de tr ˆes componentes e deles extra´ıram diferen-tes caracter´ısticas, concretamente, a raz ˜ao STA/LTA, a raz ˜ao entre a pot ˆencia horizontal e a pot ˆencia total, coeficientes de auto-regress ˜ao e o menor eixo da elipsoide de polarizac¸ ˜ao. Consideraram segmentos de registos s´ısmicos de 2.56 segundos de durac¸ ˜ao, que s ˜ao previa-mente filtrados na banda de 2 a 8 Hz. Em relac¸ ˜ao aos resultados, os melhores foram 86% de
identificac¸ ˜oes corretas e 74% de determinac¸ ˜oes de tempos de chegada da fase S, com erro menor que 0,1 segundos.
Em 1996, [Dai and MacBeth, 1997] aplicaram uma RNA para identificar de forma au-tom ´atica, instantes de chegada das fases S e P a partir de um ´unico componente de gravac¸ ˜ao. Apresentaram resultados de uma an ´alise preliminar onde testaram a aplicac¸ ˜ao da RNA para eventos s´ısmicos ap ´os serem classificados. Como soluc¸ ˜ao para o problema, utilizaram o grau de polarizac¸ ˜ao (“degree of polarization”) para 3 componentes na s ´erie de tempo de um seg-mento, como entrada da RNA. O estudo teve como dados 877 registos pr ´e-selecionados por um sistema de classificac¸ ˜ao, mas para o treino da rede apenas usaram nove instantes de che-gada das fases P e ru´ıdo. Classificaram os eventos em 3 grupos, instantes de cheche-gada das fases S, instantes de chegadas das fases P e ru´ıdo. Compararam a performance do sistema com a detec¸ ˜ao manual. O sistema classificou corretamente 84% das fases P e 63% das fases S.
J ´a em 1997, [Dai and MacBeth, 1997] propuseram uma aproximac¸ ˜ao para determinar de forma autom ´atica, o instante de chegada das fases P e S, usando MLP treinada com o al-goritmo BP, numa topol ´ogica com quarenta entradas e duas sa´ıdas. Recebiam na entrada valores absolutos da amplitude, extra´ıdos de segmentos normalizados de 40 amostras de seg-mentos s´ısmicos. Definiram as sa´ıdas (0,1), determinadas aplicando uma janela deslizante nas duas sa´ıdas formando uma s ´erie temporal, depois identificaram as fases utilizando um n´ıvel de decis ˜ao e uma regra de m ´aximo local. Em relac¸ ˜ao aos resultados, para as fases P as taxas de determinac¸ ˜oes bem-sucedidas variaram entre os 83% e 95%. Para o caso das fases S, as taxas variaram entre 75% e 61% para as determinac¸ ˜oes bem- sucedidas. Mas quando consideravam um erro de 10ms, os valores passaram a ser 63 % e 66% para os instantes de chegada das fases P, e para as fases S de 53% e 61%. Ainda neste ano os autores propu-seram uma MLP, treinada com o algoritmo BP, que identificava as fases de sismos locais em sismogramas de tr ˆes componentes.
O sistema desenvolvido, ap ´os selecionar caracter´ısticas dos segmentos de registo con-tendo fases, P e S, e ru´ıdo, com base no DOP criaram um espac¸o de caracter´ısticas com essas informac¸ ˜oes. Assim, tinham os valores entre 0 e 1, sendo os valores pr ´oximos do zero repre-sentativos do ru´ıdo, os valores perto do 1 reprerepre-sentativos das fases S e valores interm ´edios representativos das fases P.
O sistema depois de treinado classificava corretamente entre 76,6% e 82.3% das fases P, e entre 60.5% e 62.6% das fases S.


![Figura 2.1: Taxa de detec¸ ˜ao de XRTP e WDetect em Marc¸o 2001. Fonte: [Botella, Rosa- Rosa-Herranz, Giner, Molina, and Galiana-Merino, 2003]](https://thumb-eu.123doks.com/thumbv2/123dok_br/18496073.901529/47.892.209.625.107.306/figura-wdetect-fonte-botella-herranz-molina-galiana-merino.webp)
![Figura 2.3: Performance da rede para o conjunto de dados do monte Ves ´uvio. Fonte :[Scar- :[Scar-petta, 2005]](https://thumb-eu.123doks.com/thumbv2/123dok_br/18496073.901529/54.892.215.685.967.1095/figura-performance-conjunto-dados-monte-fonte-scar-scar.webp)
![Figura 2.4: Performance da rede para o conjunto de dados do monte Ves ´uvio. Fonte :[Esposito, Giudicepietro, Scarpetta, D’Auria, Marinaro, and Martini, 2006]](https://thumb-eu.123doks.com/thumbv2/123dok_br/18496073.901529/55.892.212.681.395.554/figura-performance-conjunto-esposito-giudicepietro-scarpetta-marinaro-martini.webp)

![Figura 2.6: comparac¸ ˜ao dos resultados experimentais entre RNA e IANN Fonte :[Diersen, Lee, Spears, Chen, and Wang, 2011]](https://thumb-eu.123doks.com/thumbv2/123dok_br/18496073.901529/58.892.192.686.755.943/figura-comparac-resultados-experimentais-entre-fonte-diersen-spears.webp)

![Figura 3.2: Distribuic¸ ˜ao de pontos num espac¸o bidimensional. Adaptado de: [Cortes and Vapnik, 1995].Verifica-se que para todas as combinac¸ ˜oes poss´ıveis, ´e poss´ıvel trac¸ar retas que separem perfeitamente as duas classes, nesse caso a classe c´ırc](https://thumb-eu.123doks.com/thumbv2/123dok_br/18496073.901529/67.892.283.612.100.274/figura-distribuic-bidimensional-adaptado-cortes-verifica-combinac-perfeitamente.webp)