Le deuxième obstacle est lié à l'évaluation de l'utilisabilité de l'environnement virtuel pour la rééducation motrice. Le dernier obstacle est lié à l'amélioration de la capacité autonome du sujet à travailler dans l'environnement virtuel de rééducation motrice.
Le rôle de la RV pour la thérapeutique
Cette flexibilité peut être utilisée pour offrir une formation systématique qui optimise le degré de transfert de formation ainsi que la généralisation de l'apprentissage dans le monde réel [Rizzo et al., 1997]. Du point de vue du thérapeute, la VR est donc considérée comme une métaphore ou une interface de communication [Schultheis et al., 2001].
Les applications thérapeutiques de la RV
La figure 1.3 montre un exemple de simulateur de bronchoscopie basé sur la réalité virtuelle [Dunkin, 2003]. Dans ce domaine, les outils d’évaluation VR sont efficaces et caractérisés par des propriétés psychométriques positives.
![Figure 1.1 : Un prototype d’environnement immersif implémenté dans un CAVE pour la télé-éducation en médecine [Pletcher et al., 2000]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/14.892.241.655.232.497/figure-prototype-environnement-immersif-implémenté-éducation-médecine-pletcher.webp)
Equipements de visualisation
Bien que les équipements actuels devraient réduire considérablement l'incidence du cybermaladie [Riva et al., 1998], les effets des différents systèmes immersifs sur les patients doivent encore être étudiés du point de vue du cybermaladie. En effet, nous classons les équipements de réalité virtuelle utilisés pour la rééducation motrice en trois catégories en fonction de leurs spécifications.
Equipements d’interaction
Une plasticité fonctionnelle et structurelle dans les mêmes régions corticales a également été démontrée chez le rat [Kleim et al., 2002]. Une réorganisation fonctionnelle a également été observée dans le cortex moteur des primates adultes après un infarctus ischémique focal [Nudo et al., 1996b].

Entraînement réel vs. Entraînement virtuel
Les cinq études suivantes fournissent des preuves expérimentales que les performances d'entraînement moteur dans un environnement virtuel peuvent être supérieures. Les résultats ont montré que les patients ayant été formés à la réalité virtuelle commettaient moins d’erreurs (p < 0,000) que les participants du groupe de référence n’ayant pas reçu de formation à la réalité virtuelle.

Autres facteurs qui peuvent favoriser la rééducation motrice en RV
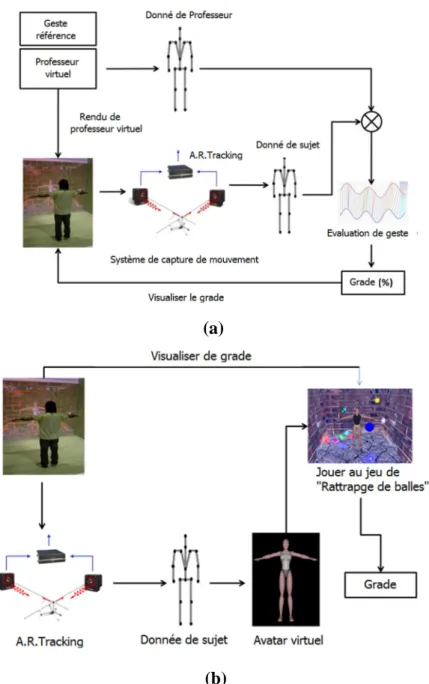
La réalité virtuelle permet également de regarder un professeur virtuel guider le mouvement à plusieurs reprises. En effet, la réalité virtuelle offre une capacité unique de feedback en temps réel aux participants pendant l’apprentissage.
![Figure 1.9 : l’apprentissage par imitation à l’aide du professeur virtuel pour améliorer le retour d’information visuelle [Baek et al., 2001]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/27.892.348.559.511.827/figure-apprentissage-imitation-professeur-virtuel-améliorer-information-visuelle.webp)
Une nouvelle méthodologie
Rééducation d’extrémité supérieure
Pendant la séance, les mouvements du patient et du professeur virtuel sont affichés sur la scène virtuelle. Le groupe Rutgers a utilisé son système de rééducation de la main dans deux études cliniques auprès de patients traumatisés chroniques.
![Figure 1.10: Un exemple de scène virtuelle de la boîte à lettres utilisée pour l’entraînement [Holden et Todorov, 2002]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/29.892.194.702.574.947/figure-exemple-virtuelle-lettres-utilisée-entraînement-holden-todorov.webp)
Rééducation d’Extrémité Inférieure (REI)
Le système se compose d'une plate-forme d'interface haptique qui fournit 6 DOF de force résistive aux pieds du patient en réponse à sa performance dans un exercice de jeu vidéo VR. Cela se fait en mappant la cinématique de la cheville sur la trajectoire de vol. Cette thérapie visait à améliorer l'utilisation de la main affectée, la force et la coordination de la jambe affectée, ainsi qu'à entraîner l'équilibre et la coordination en position debout.
Dans ce chapitre, nous avons présenté un état de l’art des applications médicales de la réalité virtuelle (VR). Nous présentons ensuite un état de l’art des applications VR dans la prise en charge de la rééducation motrice.
![Figure 1.14: Interface haptique de la cheville de Rutgers (à gauche) et une plate-forme mis en place (à droite) [Boian et al., 2003b]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/37.892.187.703.108.332/figure-interface-haptique-cheville-rutgers-gauche-droite-boian.webp)
DTW : comparaison par déformation temporelle dynamique
Un problème important dans la comparaison des mouvements est lié à l’enregistrement du temps. L'une des méthodes de comparaison de séries chronologiques est basée sur la technique de chaînage sur l'axe temporel (DTW). Berndt et Clifford ont proposé d'utiliser cette technique pour mesurer la similarité entre séries temporelles dans le domaine de l'exploration de données.
La mise en œuvre de cet algorithme se fait simplement en calculant pour chaque entrée (i, j) la distance cumulée D(i, j) correspondant à la distance optimale que l'on obtient au fur et à mesure de notre progression. Il doit être suffisamment expressif mais suffisamment simple pour permettre une estimation efficace de la similarité.
![Figure 2.2 Figure illustrant un chemin parcouru entre deux vecteurs de longueur différente [Berndt et Clifford, 1994]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/47.892.166.735.173.394/figure-figure-illustrant-parcouru-vecteurs-longueur-différente-clifford.webp)
LCSS : La plus longue sous séquence commune
Les données MoCap, qui sont capturées en enregistrant la position des marqueurs pendant le mouvement du sujet, sont des données de séries chronologiques. Contrairement à d’autres types de données de séries chronologiques (boursière, météo, etc.), les données de séries chronologiques. MoCap présente généralement plusieurs valeurs aberrantes, principalement dues à des pannes de capteurs, des pannes de signal ou des erreurs dans la technique de détection.
La technique DTW est un processus qui prend en compte tous les éléments de la séquence de données MoCap, y compris les valeurs aberrantes. Dans la section suivante, nous présentons nos expériences pour améliorer la technique proposée pour comparer les gestes afin de mesurer ultérieurement la capacité du patient à apprendre un geste humain.
![Figure 2.3 Un exemple de LCSS pour le mouvement en 2D [Agrawal et al., 1995].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/49.892.264.631.449.734/figure-exemple-lcss-mouvement-2d-agrawal-al-1995.webp)
Architecture du système
Cette technique proposée est notée wrLCSS (weighted real-time LCSS) et se présente comme suit. La complexité temporelle et spatiale du modèle wrLCSS est respectivement de l'ordre de O(δ) et O(n), où δ est une constante représentant la fenêtre temporelle et n est la dimension du mouvement de référence.
Expérience de comparaison des gestes
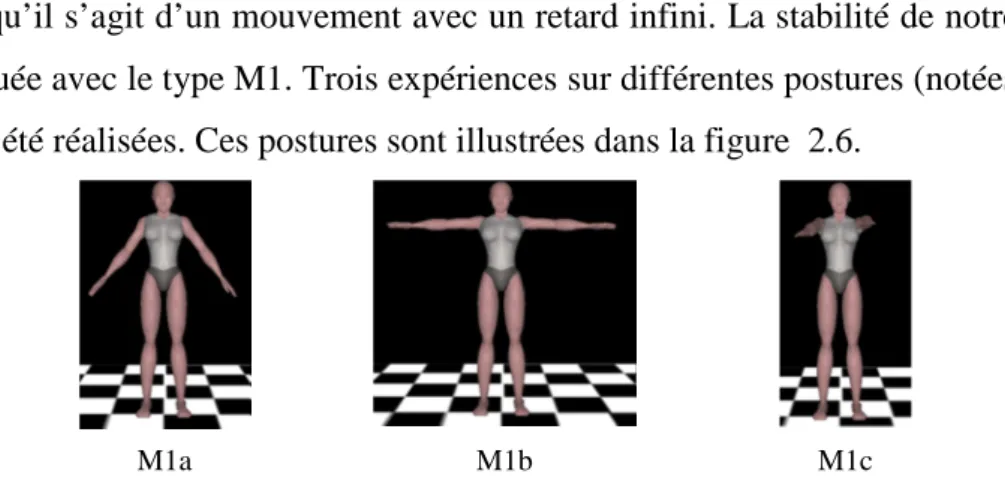
Trois courbes illustrent la performance dans l'exécution des trois mouvements simples pour neuf sujets. Pour analyser la différence entre M3 et M4, la figure 2.11 montre les courbes de performances obtenues pour les six mouvements pris en deux groupes de mouvements M3 et M4. Comme le montre la figure 2.11, on remarque que la différence entre les deux groupes de mouvements est significative.
Les sujets effectuaient des mouvements simples avec de meilleures performances que des mouvements complexes. A partir des valeurs significatives de ce tableau, nous vérifions que la différence de performances entre les mouvements simples et les mouvements complexes est très importante.
Expérience pour mesurer la capacité à apprendre un geste humain
Dans la section suivante, nous réalisons une autre expérience basée sur cette technique pour mesurer la capacité à apprendre le geste dans le cadre de la rééducation motrice. Cette approche est une méthode nouvelle et quantitative pour évaluer la capacité du patient à apprendre les gestes humains. Enfin, une combinaison de ces similitudes et de la complexité gestuelle est considérée pour estimer la capacité d'apprentissage gestuelle du sujet.
Dans le tableau 2.3, nous montrons le niveau de capacité (LoA) d'apprentissage des signes en fonction du seuil. Dans cette expérience, nous avons proposé une nouvelle approche pour mesurer la capacité d'apprentissage des gestes dans un environnement virtuel avec vision à la troisième personne pour la rééducation motrice.

- Environnement physique
- Evaluateur
- Sujet
- Etat de l’art des méthodes pour évaluer l’usabilité des EVs
- Environnement virtuel pour la rééducation motrice du point de vue de la deuxième personne
- L’avatar virtuel
- Evaluation de l’effet de l’avatar virtuel sur l’environnement
- Participants
- Expérience du jeu de balles
- Apprentissage de mouvements du Tai-Chi Chuan
- Expérience du rattrapage de balle
- Expérience de l’apprentissage du geste humain
Dans ce qui suit, nous présentons notre méthode d'évaluation de l'utilisabilité d'un environnement virtuel et soulignons les avantages de notre approche. La convivialité de l'environnement virtuel est liée au succès ou au résultat de la rééducation du patient. De plus, pour analyser l'effet de l'avatar virtuel, nous considérons l'évaluation de l'impact de ses caractéristiques sur les performances de rééducation motrice.
Cinq représentations de l'avatar virtuel (squelette, avatar en 2D et en face-à-face, avatar en 2D et en face-à-dos, avatar en 3D et en face-à-face, avatar en 3D et en face-à-face mode face-à-dos) sont respectivement numérotés de 1 à 5. Nous avons précédemment souligné que l'avatar virtuel est une composante très importante de l'environnement virtuel pour la rééducation motrice.
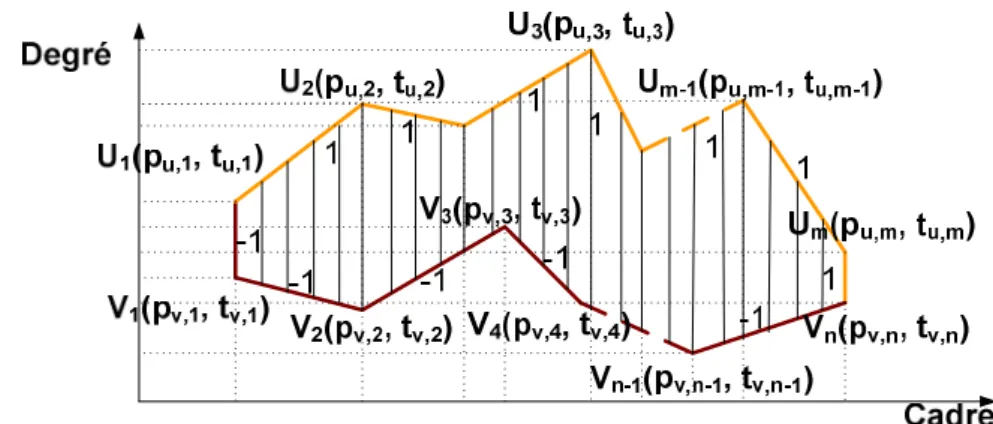
Superficie du polygone constitué par deux courbes de séries chronologiques
La première formule de notre travail concerne l'aire du polygone qui est constitué de deux courbes U(m) et V(n). Nous avons obtenu la formule ci-dessus par la formule bien connue pour calculer l'aire d'un polygone plan qui ne se coupe pas : « l'aire d'un parallélogramme et d'un triangle peut être exprimée comme la grandeur du produit vectoriel de deux segments vecteurs"[ 18]. En pratique, une technique avec une complexité de calcul d'ordre O(n) peut être utilisée pour calculer l'aire du polygone qui ne se coupe pas lui-même.
Nous désignons S2 comme l'aire du polygone auto-sécant, qui est ensuite formulée par la formule 4.4. Quoi qu'il en soit, une technique avec une complexité de calcul d'ordre O(n) peut être envisagée pour calculer l'aire du polygone auto-intersecté.
Superficie des parties externes générées par une courbe et un polygone non-auto-intersecté
Après avoir défini les limites U et L de la courbe C et la distance de Manhattan définie dans la formule 4.10, nous les utilisons pour déterminer la mesure limite du DTW. Dans la section suivante, nous décrivons une autre technique d’amélioration de l’efficacité basée sur la technique de réduction de dimensionnalité des courbes. Comme décrit ci-dessus, la technique de réduction de dimensionnalité de courbe est utilisée pour accélérer le système en conjonction avec la technique liée.
Par conséquent, au lieu de la distance euclidienne d'un point à une ligne comme dans la version originale de la technique de Lowe, nous utilisons une mesure de distance. Illustration de la distance utilisée au lieu d'utiliser la distance euclidienne comme dans la version originale de la technique de Lowe.

Technique modifiée de Lowe pour simplifier la courbe candidate
Technique modifiée de Lowe pour simplifier la courbe de borne de requête
Sinon, créez un nouveau point clé au point présentant la plus grande distance d'erreur. On observe Uˆ une courbe simplifiée pour la limite supérieure de U et Lˆ une courbe simplifiée pour la limite inférieure de L.
Accélération du système de fouille de données MoCap
En pratique, le coût de calcul de LB_Keogh_Lowe est inférieur à celui de LB_Keogh. Pour filtrer rapidement les candidats négatifs qui ont un seuil δ, au lieu d'utiliser l'inégalité 16, nous avons utilisé une autre inégalité dérivée de la distance LB_Keogh_Lowe, dans laquelle la courbe candidate V sera une courbe négative si : LB_Keogh_Lowe(C, V)>δ (18 ) . Nous résumons cette section avec la figure 4.11, qui montre l'algorithme proposé pour implémenter le problème d'exploration de données MoCap basé sur l'appariement de courbes.
Cette section présente les expériences mises en œuvre pour analyser l'efficacité de la technique de simplification des courbes en termes de réduction de dimensionnalité et de technique liée. De plus, nous menons une expérience pour vérifier l'efficacité du système d'exploration de données MoCap.

Préparation de données
Les expériences ont été mises en œuvre sur un PC équipé d'un processeur Intel Pentium Dual-Core 2,1 GHz, de 2 Go de RAM, et le système est programmé en langage C.
Résultat
Presented at the 1st International Workshop on Virtual Reality Rehabilitation (Mental Health, Neurological, Physical, Vocational), VRMHR 2002, Lausanne, Switzerland. Human factors consideration in clinical applications of virtual reality. ed.), Virtual reality in neuro-psychophysiology. Virtual reality-based multidimensional therapy for the treatment of body image disturbances in obesity: A controlled study.
A bibliography of articles related to the application of virtual reality in the field of mental health. 12-month follow-up of virtual reality and standard exposure therapies for fear of flying.

![Figure 1.3 : Un simulateur de la bronchoscopie basé sur la réalité virtuelle [Dunkin, 2003]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/16.892.186.699.447.640/figure-simulateur-bronchoscopie-basé-réalité-virtuelle-dunkin-2003.webp)
![Figure 1.5 : Environnement virtuel ARCANA pour évaluer des fonctions cognitives chez les personnes ayant acquis des lésions cérébrales [Riva, 1998]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/18.892.134.720.641.927/figure-environnement-évaluer-fonctions-cognitives-personnes-lésions-cérébrales.webp)
![Figure 1.13: Exercices virtuelles, (1) l'amplitude de mouvement (ADM), (2) la vitesse, (3) le fractionnement et (4) la force [Jack et al., 2001]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/35.892.213.686.102.493/figure-exercices-virtuelles-amplitude-mouvement-vitesse-fractionnement-force.webp)
![Figure 1.15: Exercices virtuels, piloter l’avion (à gauche) et piloter la vedette (à droite) [Boian et al., 2003a]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/37.892.158.746.893.1114/figure-exercices-virtuels-piloter-gauche-piloter-vedette-droite.webp)
![Figure 1.16: Le mécanisme proposé pour la machine virtuelle de marche [Yoon et al., 2003]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/38.892.273.614.825.1096/figure-mécanisme-proposé-machine-virtuelle-marche-yoon-2003.webp)
![Figure 1.17: Système haptique avec l’environnement virtuel [Yoon et al., 2003]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/464114.69689/39.892.272.623.119.452/figure-17-système-haptique-environnement-virtuel-yoon-2003.webp)
