Dans le dernier chapitre, nous étendons le cadre d'application de la méthode LMME au cas de modifications fortement dissipatives. 4 amortis, nous montrons que la méthode LMME initialement proposée appliquée dans le cadre du MSE [78] est équivalente à la méthode LMME amortie.
Mod` eles de mat´ eriaux dissipatifs
- Visco´ elasticit´ e lin´ eaire
- Facteurs d’environnement
- Fr´ equences et variables r´ eduites
- Repr´ esentation
- Choix des mat´ eriaux
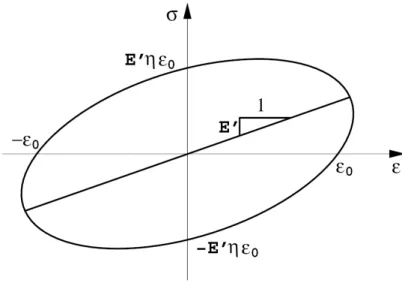
1.2 – Variation du module de conservation E′ et du facteur de perte d'un matériau viscoélastique en fonction de la température à fréquence constante. Cependant, il existe très peu de données sur la variation de ν en fonction de la fréquence et de la température.
Dispositifs amortissants
Diff´ erents types de dispositifs amortissant
La première est le simple collage d’une fine couche de matériau viscoélastique. 1.10 – Localisation de dissipation pour une configuration de panneaux collés en matériau viscoélastique.
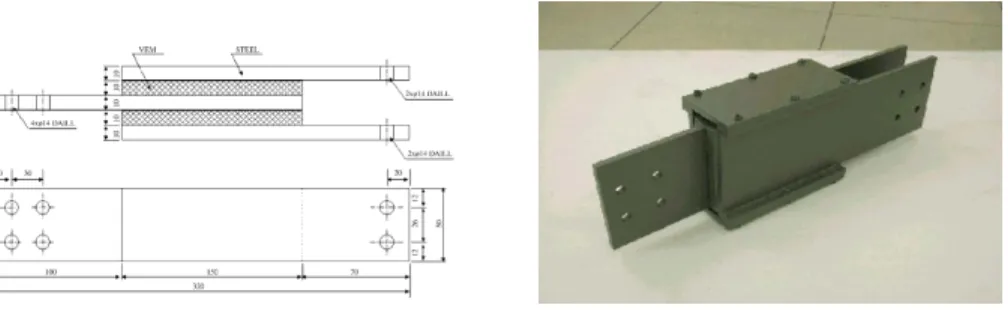
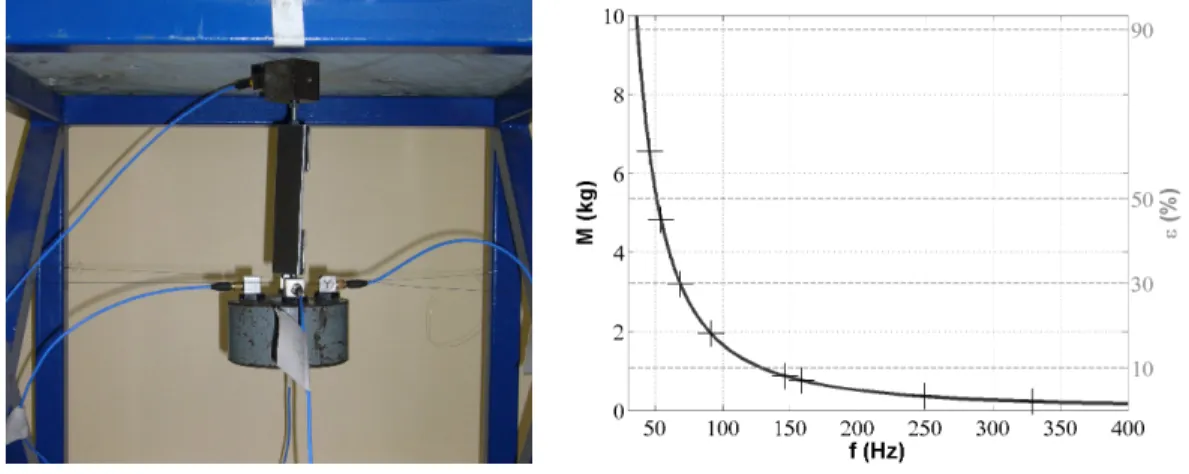
R´ ealisation de tirants amortis
La fréquence propre du mode traction-compression est directement liée à la masse utilisée et au module de cisaillement du matériau viscoélastique smactane50 qui forme la barre d'attelage. 1.17 – Module de cisaillement Trouver le facteur de perteη du matériau viscoélastique en fonction de la fréquencef.

Mod` eles de structures amorties
Equations du mouvement ´
Il s’agit d’un enrichissement de premier ordre des véritables principes fondamentaux classiques de la réduction de modèles. Concernant les modèles d'état utilisés en automatisation, en dynamique structurelle, il est pratique de distinguer les états (appelés degrés de liberté et notés q), les entrées et les sorties.
MSE (Modal Strain Energy)
Dans le cas particulier d'un modèle à amortissement visqueux et hystérétique, les coefficients d'amortissement modal équivalents ξj sont exprimés sous la forme. 2.16). Pour un modèle expérimental (voir section 4.1.1), la nature de l'amortissement ne peut être connue de manière générale.
Modes complexes
Ce modèle permet de reproduire le comportement dynamique mesuré sans prédire la nature réelle du mécanisme de diffusion local. Il convient cependant de noter que le modèle d’amortissement hystérétique (constante B) n’est pas physique.
R´ eduction de mod` eles visco´ elastiques
- Enrichissement par des termes de correction statique
- Cas d’un amortissement localis´ e
- Cas d’un amortissement r´ eparti
- Conclusion sur l’enrichissement
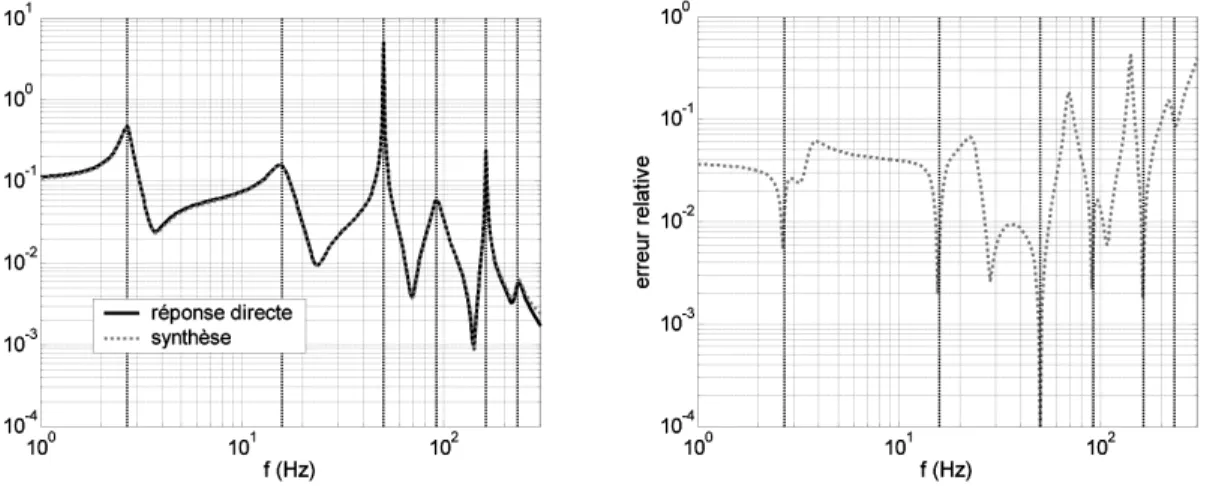
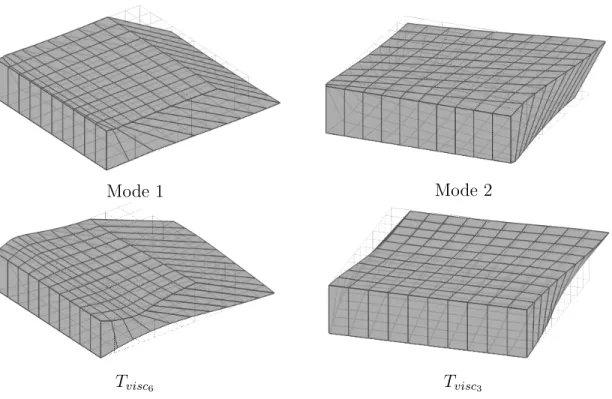
La figure 2.12 montre la convergence des FRF synthétisés par l'enrichissement de la base de réduction. La figure 2.18 montre la contrainte Tvisc sur le ddl décrivant la coupe du calque.

Le probl` eme industriel
Contexte
La section 3.2 présente ensuite le démonstrateur utilisé et l'objectif fixé pour le développement de la thèse. L'intérêt de ce type de modification n'est pas le décalage de fréquence, mais la réduction générale du niveau vibratoire dû à l'amortissement. En effet, le décalage de fréquence obtenu par des modifications de masse ou de rigidité n'est généralement pas suffisant pour supprimer les résonances de la bande excitée.
Un exemple d’application possible
Dans ces cas, le décalage des fréquences propres peut être une solution difficile à maîtriser ; le décalage peut provoquer l'excitation d'un état adjacent qui aurait souffert de l'effet de la modification. Le risque de commuter en fréquence un mode capable d'adapter les forces d'excitation existe alors. L'évolution mécanique de la structure, une perte de rigidité des matériaux isolants, a pour effet de rapprocher les fréquences de résonance de certains modes propres excitables de la ligne d'excitation.
Le d´ emonstrateur
Justifications du choix du d´ emonstrateur
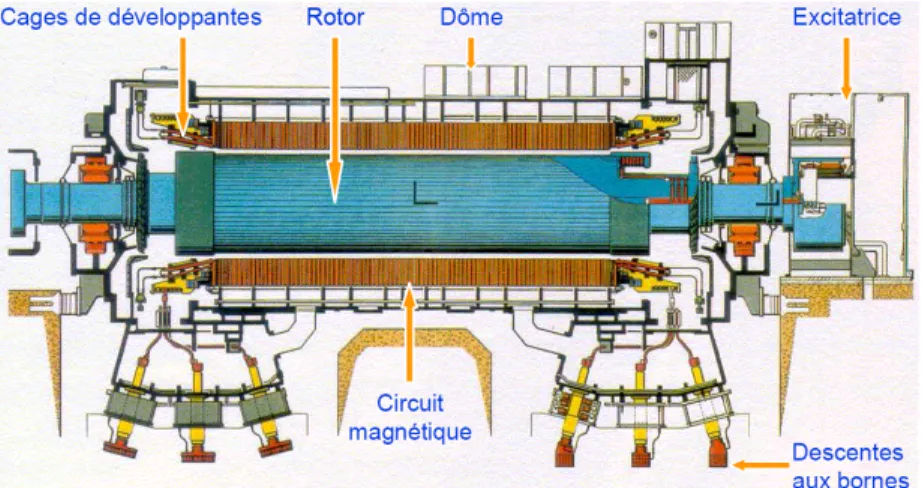
Il est clair que le comportement dynamique du démonstrateur en tôle d'acier homogène est nettement plus facile à idéaliser que celui d'une véritable cage d'alternateur en développante, « à géométrie complexe, assemblage de matériaux et de structures hétérogènes, et comportement non isotrope ». La complexité du démonstrateur a été jugée suffisante pour constituer une bonne démonstration de principe d'application de dispositifs d'amortissement pour réduire les vibrations des structures d'EDF.
Analyse modale exp´ erimentale de la structure initiale
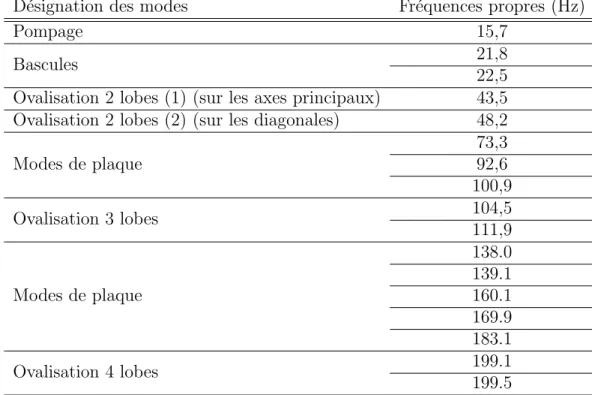
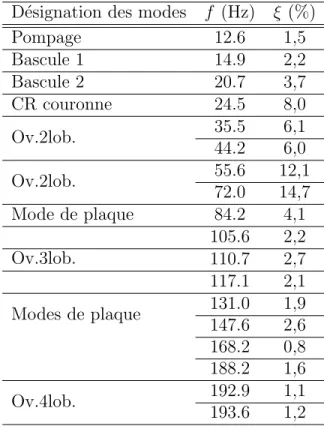
Cette configuration de capteurs est suffisamment dense pour permettre l'identification des premiers modes de la structure jusqu'à environ 200 Hz. La couronne supérieure de 12 capteurs permet l'identification de modes d'ovalisation à 4 lobes dont les fréquences propres se situent autour de 200 Hz. Le tableau 3.2 donne les désignations, fréquences propres et amortissements modaux des modes identifiés de la structure.

Description num´ erique
Le modèle numérique fournit des déformations relativement similaires à celles trouvées. La figure 3.11 compare les transmissions mesurées synthétisées avec des modes identifiés jusqu'à 200 Hz et calculés à partir du modèle numérique. 3.11 - Transmissions mesurées synthétisées avec des modes identifiés jusqu'à 200 Hz et calculées à partir du modèle numérique.
Description de la modification
Concept original de dispositif amortissant
3.12 – Principe de conception de l'amortissement des modes d'ovalisation Ce principe de conception doit cependant être adapté à l'environnement de la structure à modifier. Dans le cas où l'encastrement des tirants fixés à l'extérieur de la structure est possible, seule la répartition angulaire des tirants peut poser problème. Un troisième tirant est ajouté dans le plan horizontal pour éviter les modes de corps pseudo-rigide de la couronne.

Effet de la position des tirants
Les trois bielles dans les plans verticaux sont orientées à +45˚ par rapport à l'horizontale afin de supporter le poids de la couronne (composante verticale) tout en travaillant sur l'amortissement de la modalité d'ovalisation (composante horizontale). On constate cependant que les courbes d'évolution de l'amortissement des modes d'ovalisation 3 lobes sont en opposition de phase. Il permet de vérifier que chacune des bielles joue un rôle important dans l'amortissement. a) : fraction de l'énergie de déformation présente dans les bielles amorties dans l'énergie totale dissipée.

Dimensionnement de la modification
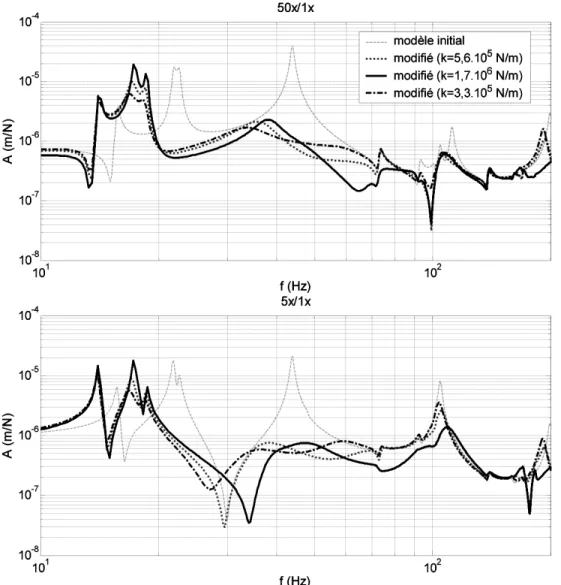
La figure 3.24 représente l'évolution d'une réponse fréquentielle en fonction de la raideur des tirants. 3.25 – Evolution de la fréquence et de l'atténuation en fonction de l'ampleur du changement. Les paramètres de l'étude sont indiqués dans le schéma de la figure 3.28.
Conception finale
Cependant, avec une couronne de masse m = 15kg, et une configuration à 9 timons (6 des 9 timons reprennent le poids de la couronne), les timons amortis de la section 1.2.2 permettent de limiter les effets de précharge statique difficiles quantifier sans un test approprié. La configuration choisie pour amortir les vibrations entre 30 et 150 Hz est composée d'une couronne hexagonale suffisamment rigide (on veille à ce que la fréquence du premier mode élastique de la couronne dans l'ensemble complet soit supérieure à 180Hz) connectée. Le modèle éléments finis et la photographie de la structure modifiée sont présentés dans la figure 3.31.

Analyse modale de la structure modifi´ ee
3.5 – Désignation des modes identifiés de la structure modifiée, fréquences propres et coefficients d'amortissement modal. En fait, la modification dissipative est conçue à l'aide de tirants amortis, et les propriétés du matériau viscoélastique sont choisies de telle sorte que les états des tirants soient dans la bande effective de la modification. La figure 3.36 montre l'efficacité du changement proposé et confirme la nécessité de disposer d'un modèle numérique recalibré pour espérer prédire l'effet d'un changement en utilisant les méthodes classiquement utilisées pour une phase de revue de conception.
Conclusion
Des méthodes de modification structurelle permettant d'écrire un couplage entre sous-structures basées uniquement sur des données expérimentales existent. Soit pour répondre aux besoins de réactivité d'EDF, soit à l'impossibilité de construire une maquette erronée d'un ouvrage, certaines méthodes de modification structurelle offrent des avantages considérables. La section 4.2 présente les limites des méthodes traditionnelles de modification des structures qui ont conduit EDF à financer des travaux pour améliorer leurs performances.
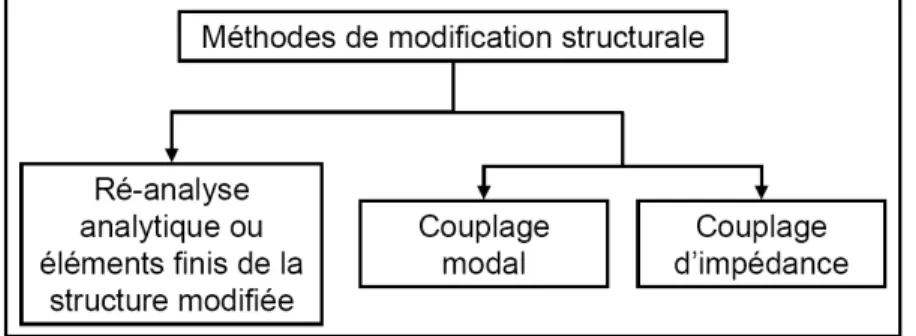
M´ ethodes classiques de modification structu- rale : outils et formulations
- Mod` ele de la structure d’origine
- Sous-structuration dynamique et r´ eduction de mod` eles
- Formulation multiplicative ou m´ ethode de couplage d’imp´ edanced’imp´edance
- Formulation additive ou m´ ethode modale
La méthode modale, présentée dans la section 4.1.4, utilise un modèle modal de la structure originale. On peut alors exprimer la raideur dynamique de la structure en coordonnées généralisées. C'est pourquoi la prise en compte de la contribution basse fréquence (effet statique ω → 0) des modes tronqués permet un couplage plus correct (développement de la méthode de MacNeal [29]).
Limitations des m´ ethodes classiques de modifi- cation structurale
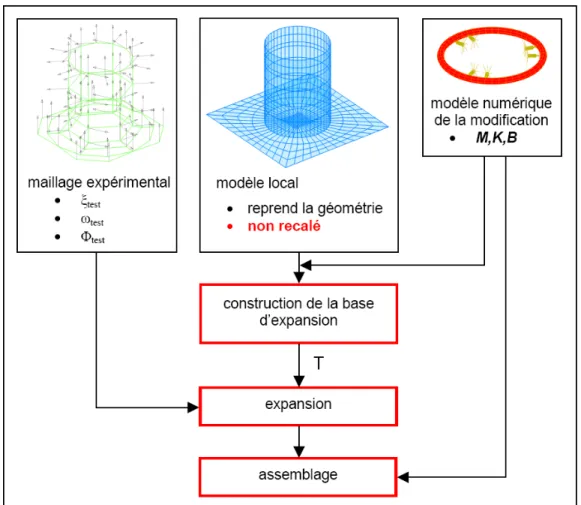
Les points d'évolution par rapport aux méthodes classiques sont la phase d'expansion et l'introduction du « modèle local » (point 4.3.1). L'intégration de la phase d'extension permet de limiter le besoin d'informations de mesure disponibles sur l'interface. De plus, la méthode est basée sur les méthodes de réduction de modèle et d'expansion de données, et l'introduction d'un modèle géométrique qui prend en charge la structure initiale nous permet de fournir une base efficace de fonctions régulières pour la reconstruction des déformations d'interface.
M´ ethode de modification structurale LMME (Local Model Modeshapes Expansion) : outils
- Le mod` ele local
- Expansion de donn´ ees
- Modes d’interface
- Etude du processus de pr´ ´ ediction
- Proposition de mise en œuvre industrielle
L'expansion des données dépend fortement du choix de la base de réduction [T]. KM et MM sont respectivement les matrices de rigidité et de masse du modèle de modification statiquement condensé à l'interface. Il permet d'éliminer les déformations suspectes et d'affiner le choix de la taille optimale de la base d'expansion.
Les ´ evolutions de la m´ ethode LMME
La section 5.1 présente le développement de la méthode pour son application aux cas amortis. La section 5.6 présente enfin la validation expérimentale de la prédiction de l'effet de la modification du démonstrateur. Les données issues de l'identification de la structure de base sont utilisées dans le formulaire (4.5).
Un premier exemple
L'utilisation des modes normaux devrait dans un premier temps permettre l'application de la méthode de prédiction et la détermination des fréquences propres et des distorsions du système couplé. Les dimensions du réservoir et la modification (plus étanche) sont données dans le tableau 5.1. Le tableau 5.2 donne les caractéristiques modales de la structure avant et après modification.
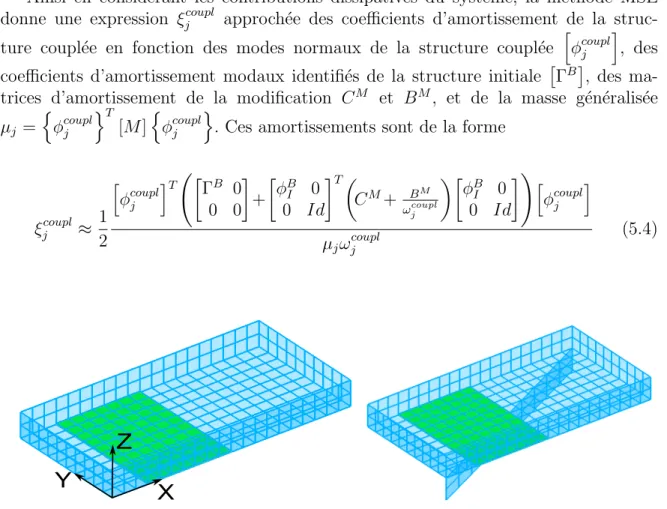
Un exemple plus complexe
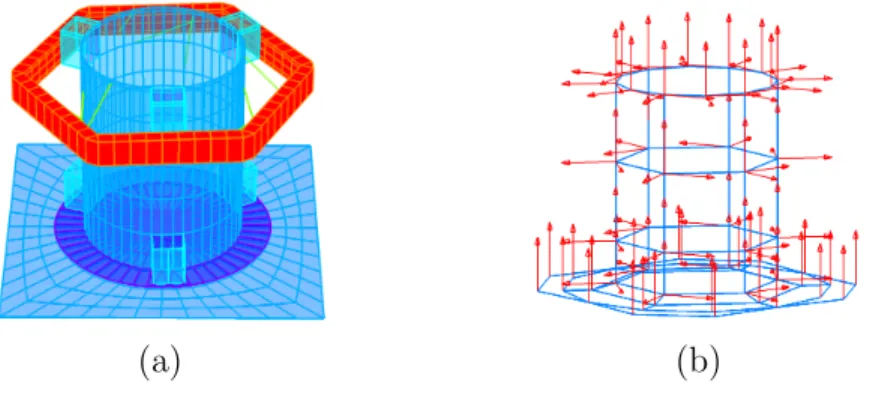
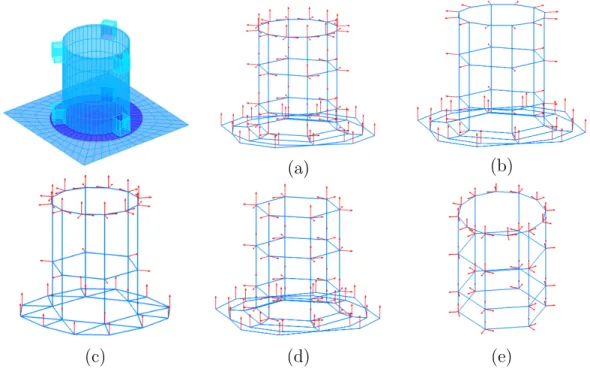
De plus, nous choisissons ici de considérer un comportement indépendant de la fréquence pour simplifier l’étude numérique de la méthode basée sur ce cas de test présenté dans la section 5.4. 5.3 – Modèle local considéré et configuration des capteurs utilisés pour appliquer la méthode LMME. La figure 5.4 montre quelques formes modales de la structure modifiée qui seront utilisées pour illustrer l'étude numérique de la méthode développée dans la section 5.4.
Robustesse de la m´ ethode LMME amortie
Choix du maillage capteurs
La différence vient de la couronne supérieure qui n'apparaît pas dans la configuration. Aucune hypothèse n'est faite sur la position de la modification et la configuration limite l'identification. La non-observation des mouvements des plaques par la configuration (e) a été pénalisée pour la forme globale du mode reconstruit.
Choix du mod` ele local
5.10 – Evolution des valeurs de prédiction en fonction de la taille de la base d'expansion pour différentes épaisseurs du cylindre dans le modèle local. 5.12 (a)) est significativement modifié par rapport à celui obtenu avec le modèle local de référence (Fig. Pour la prédiction faite à partir du modèle local (a), l'introduction du 9ème mode permet à l'IERI de diminuer.

Choix de la taille de la base d’expansion
5.17 – Élaboration des valeurs de prédiction pour le mode 16 en fonction de la taille de la base d'expansion. Les courbes d’évolution des prévisions présentées dans la figure 5.17 le montrent. Il convient même de noter qu’un élargissement de la base d’expansion peut dégrader les résultats des prévisions.
Sp´ ecificit´ es des modifications dissipatives
Choix de la fr´ equence centrale pour le calcul de la base de r´ eductionde r´eduction
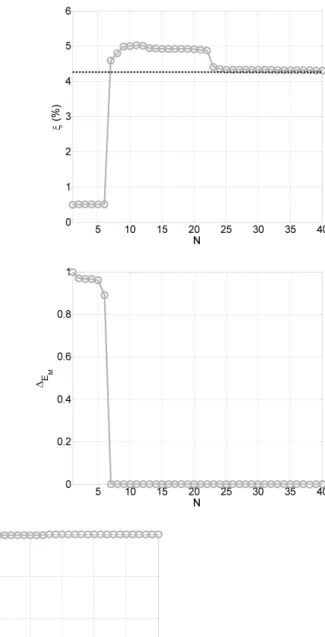
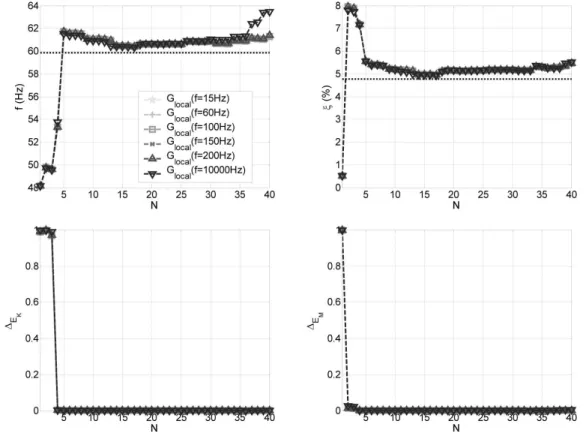
5.22 – Evolution des fréquences et de l'amortissement d'un mode d'ovalisation bilobé prédit et indicateurs d'erreur associés en fonction de la taille de la base d'expansion, pour différentes bases d'expansion. Nous montrons donc que le comportement associé aux premiers modes de la structure dépend relativement peu du comportement du matériau viscoélastique. De plus, la flexibilité du changement sur toute la bande de fréquence considérée implique une légère modification des distorsions.
Evolution du comportement de la modification selon la ´ fr´ equence
On peut alors effectuer la prédiction de chaque mode à l'aide du module Gaz, qui est lié à la fréquence du mode. Les transmissions synthétisées à partir des modes complexes prédits et de l’équation (2.22) ne sont en réalité pas précises dans le cas de structures dont le comportement dépend fortement de la fréquence (section 2.1.3). 5.24 - Transmissions directes et synthétisées à partir de modes complexes calculés avec la valeur du module correspondant à leur fréquence propre.

Comparaison essais/pr´ ediction
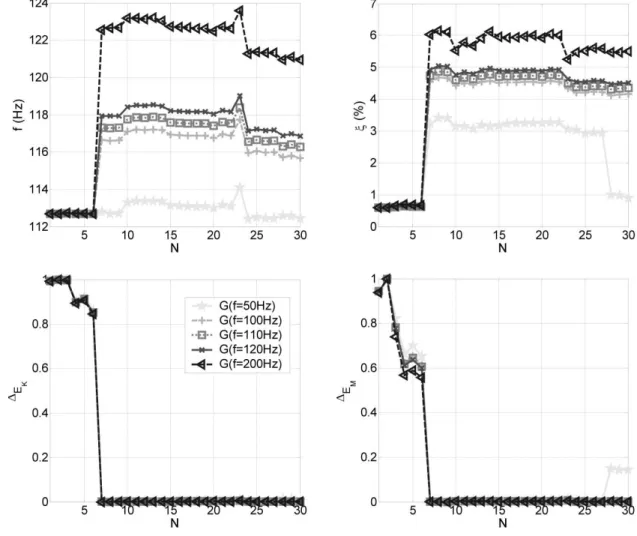
5.26 – Evolution des paramètres de prédiction pour un mode d'ovalisation à 3 lobes en fonction de la taille N de la base d'expansion pour différentes valeurs de G. 5.28 – Evolution des paramètres de prédiction pour un mode d'ovalisation à 2 lobes en fonction de la taille N de la base d'expansion pour différentes valeurs de G. Les résultats de prédiction de l'effet du changement sur le début de la structure sont corrects.
![Fig. 1.3 – Module de stockage et facteur de perte du BI2F en fr´equence r´eduite - -T ∈ [0 − 50] ◦ C, [52].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/463680.69404/27.918.169.704.161.374/fig-module-stockage-facteur-perte-bi2f-equence-eduite.webp)