Les travaux de cette thèse démontrent théoriquement et expérimentalement la portabilité de l'identification passive dans des milieux solides instrumentés en volume. Le chapitre 2 relate les résultats obtenus dans le cadre de l'identification passive d'environnements visco-élastiques.
Terminologie de l’identification passive
L'équation (1.9) appliquée à une source blanche permet d'obtenir une expression de la corrélation de Green. L'équation (1.11) montre que connaître la corrélation de Green fournit des informations sur l'environnement.

Mod´ elisation des milieux ´ elastiques
L'estimation de la corrélation verte est une alternative à la reconstruction de la fonction verte via une identité départementale. Cependant, l'interprétation et l'utilisation de la corrélation de Green sont difficiles sur la base de l'équation (1.11).
Etat de l’art sur l’identification passive
D'autre part, l'identité montre que la fonction de Green peut être dérivée de la corrélation de Green, qui est souvent utilisée en identification passive. En plus de la distribution spectrale, la distribution spatiale du bruit affecte l'estimation de la fonction de Green ou de la corrélation.
Conclusion
Cette difficulté vient de la forme de l’opérateur de dissipation visqueuse pour les champs de pression et de déplacement. La partie temporelle de l'opérateur ondelette N est un opérateur différentiel à coefficients constants.
Propagation visco-´ elastique
Corr´ elations de Green et identit´ es de Ward visco-acoustique et visco-´ elastique
Dans ce domaine, la corrélation visco-acoustique de Green est proportionnelle à la partie imaginaire de la fonction visco-acoustique de Green. L'équation (2.58) est une expression complète et exacte de la corrélation visco-Green.
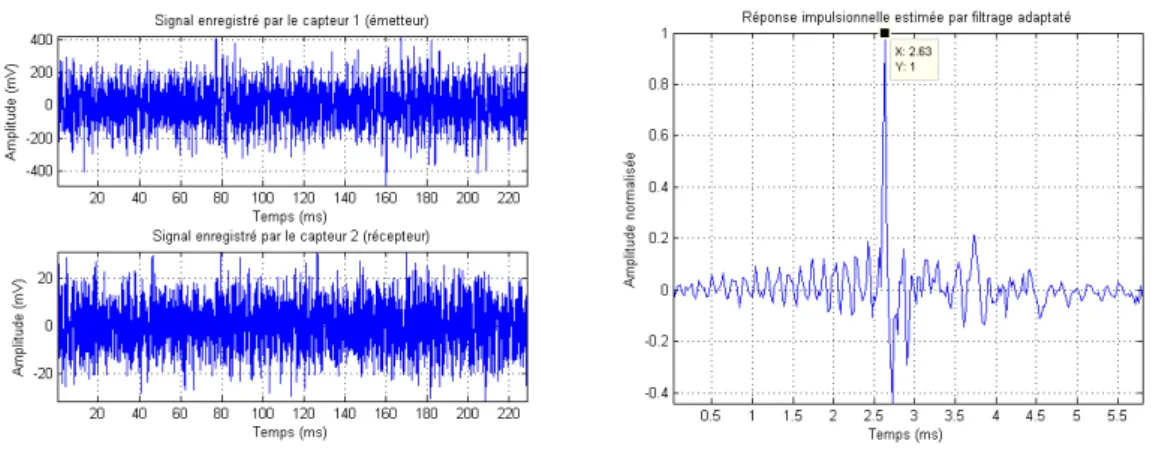
Exp´ erimentations en acoustique
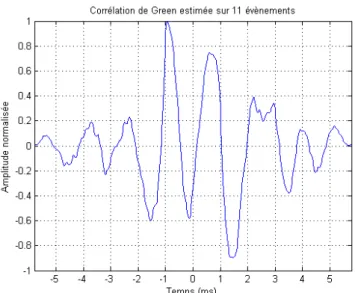
Green, et à son tour, quantifier la contribution de la corrélation de Green à l'identification passive (sous-section 2.4.5). Nous nous intéressons ici à la vitesse de convergence de la méthode vers la corrélation de Green. Nous utilisons maintenant la reconstruction de corrélation de Green pour l'estimation du temps de vol entre deux capteurs.
En bas : comparaison entre la dérivée troisième de la corrélation de Green et la partie impaire de la fonction de Green. En bas : comparaison entre la dérivée troisième de la corrélation de Green et la partie impaire de la fonction de Green. Bottom : idem top pour les vitesses estimées via la dérivée troisième de la corrélation de Groen.

Exp´ erimentations en sismique
Ces expériences ont montré que la corrélation de Green était un outil intéressant pour suivre l'environnement étudié et l'instrumentation utilisée. Cependant, la reconstruction expérimentale de la fonction de Green via une identité de branche est compromise par les nombreuses distorsions provenant du cadre numérique, les approximations dans les modèles ainsi que les imperfections dans l'estimation de la corrélation de Green (pondération). Les perspectives d'exploitation de la corrélation de Green sont nombreuses et ont été évoquées ci-dessus.
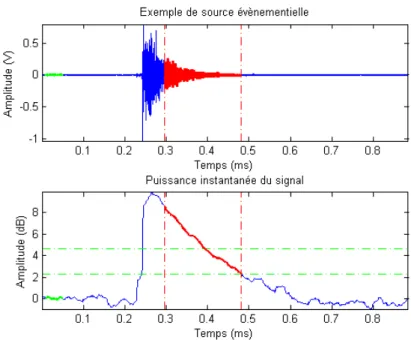
Ces expériences marquent le début de nouvelles campagnes de mesures et de développements théoriques visant à mieux interpréter la corrélation de Green et à améliorer son estimation des passifs. Sur la base du modèle de mesure (2.84), nous décrivons le modèle d'intercorrélation calculée. L'intercorrélation du bruit blanc propagé est alors une version tordue de la corrélation de Green.
Conclusion
Il montre l’absence d’algorithme de résolution générique sans structure a priori de la matrice de distance. Notez que la matrice de distance du réseau peut être définie pour toute métrique autre que la norme euclidienne, telle que la norme infinie. La matrice de distance du réseau est symétrique, de diagonale nulle, avec des coefficients positifs, et satisfait toutes les inégalités triangulaires suivantes.
Pour les matrices de distance résultant d’un processus d’estimation, la matrice de Gram estimée ne sera pas de rang général. En effet, à l'aide de la décomposition (3.2) et de l'équation (3.3), la matrice de Gram calculée à partir de la matrice des distances estimées a la forme suivante. Un exemple de localisation via une matrice de distance estimée par RSS peut être trouvé dans [Costa06].
R´ esolution du cas complet
Le vecteur ˆY est estimé par la décomposition en valeurs singulières de la matrice de Gram. En pratique, l'hypothèse de bruit indépendant n'est pas vérifiée puisque chaque capteur contribue plusieurs fois à l'estimation de la matrice distance. Le critère STRESS peut être utilisé pour une matrice de distance non complète [Costa06].
Dans le cadre de la localisation via une matrice de distance, la programmation semi-définie intervient dans la minimisation du critère quadratique suivant [Ding08]. L'avantage de travailler avec la matrice de Gram est qu'elle est théoriquement semi-déterminée. En utilisant le modèle de bruit relatif constant et la relation (3.3), l'erreur s'écrit sur la matrice GramBG : = ˆG−G.
Un nouvel algorithme pour le cas incomplet et bruit´ e
Nous trouverons dans [Dattoro06] une illustration, à travers des exemples, de la complexité du problème SNL lorsque la matrice de distance est incomplète. Une méthode quasi-générique (c'est-à-dire sans information a priori sur la structure de la matrice de distance) a été développée dans [Krislock09]. La transformation obtenue permet de retrouver analytiquement la position des capteurs sans compléter au préalable la matrice de distance.
Nous supposons que la matrice de distance disponible est associée à la matrice de contiguïté suivante. A noter que cet algorithme est total et qu'il fournit une estimation de la matrice de position. Pour une observation de la matrice des dispositions relatives, nous la complétons à l'aide de l'algorithme A(P).

Conclusion
Le processus générique présenté au chapitre 3 montre que la résolution du cas complet, comme pour le problème SNL, est suffisante. Ce formalisme a été adopté pour résoudre le problème du SNA présenté à la section 4.2. L’approche s’inspire de l’algorithme MDS pour résoudre le problème SNL dans le cas complet.
Le problème SNA consiste à estimer le vecteur d'attitudes à partir d'une matrice incomplète et bruitée d'attitudes relatives et d'un vecteur de références. Dans le cas complet, le problème SCN peut être considéré comme un problème inverse où le problème direct est de trouver la matrice des attitudes relatives (O) à partir du vecteur des attitudes (Q). Cette comparaison permet de faire une analogie avec le problème SNL, où O joue le rôle de matrice de Gram du réseau de capteurs.
R´ esolution du probl` eme SNA complet et bruit´ e
L'absence de prise en compte des statistiques de bruit ne permet pas de définir précisément un critère via la théorie de Bayes. Le critère est normalisé avec ||O||˜ 2F =N2, de sorte que C1(P) peut être interprété comme une erreur relative. La minimisation du critère C1 dans SN×1 est un problème d'optimisation non linéaire avec contraintes.
On peut préciser parmi les vecteurs propres de ˜O associés à ˆλ1 ceux qui minimisent la valeur du critère. En conséquence de ce théorème, on retrouve le résultat intuitif montrant que le minimum du critère tend vers 0 si λ1 tend vers N. L'estimation de rotation ˆs est déterminée en minimisant le critère des moindres carrés suivant.
Performances
Identification de milieux de propagation
Hormis l’économie de ressources, l’identification passive ne dégrade pas davantage l’environnement et reste une méthode plus discrète. En revanche, l'identification passive est déterminée par les propriétés du son ambiant (puissance, fréquence, répartition spatiale).
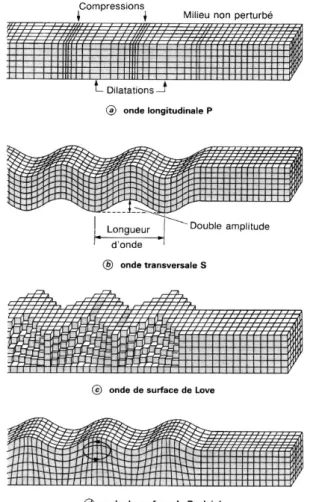
Champs et milieux
Ce dernier point est important en génie civil où les méthodes d'identification active nécessitent la mise hors service de l'ouvrage. Cette analogie permet de comprendre l’identification des supports de diffusion comme un cas particulier de l’identification des systèmes.
Fonction de Green d’un milieu lin´ eaire
Mathématiquement, cela implique, en plus de la linéarité de l'opérateur G, l'existence d'un noyau appelé fonction de Green moyenne. Selon la terminologie de la théorie des systèmes, la fonction de Green est la réponse impulsionnelle du milieu.
Inter-corr´ elation, bruit blanc et corr´ elation de Green
Il sera utilisé pour déterminer une expression de la corrélation de Green définie ci-dessous. La corrélation de Green apparaît donc naturellement dans l'identification passive des environnements puisqu'il s'agit de l'autocorrélation du bruit blanc diffus.
Acoustique
Lacoume dans [Lacoume07], où il montre que la corrélation de Green se produit naturellement dans la modélisation des techniques d'identification passive en acoustique. L'identité de Ward apparaît alors comme un outil informatique utile pour comprendre la corrélation de Green, mais n'intervient plus dans l'identification.
Sismique
M´ ecanique des structures
Pr´ emices
Mod` eles et identit´ es de Ward
Cet article est pionnier dans l'identification passive des paramètres dans les environnements mécaniques. En effet, le suivi des paramètres modaux (modes propres, fréquences propres et amortissement naturel) est significatif pour l'évolution globale de la structure.
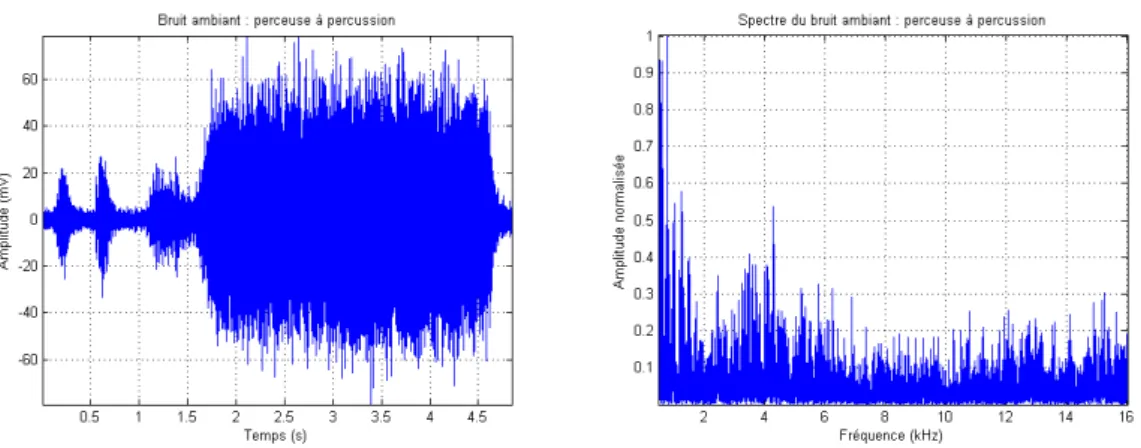
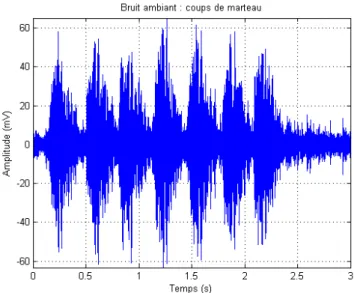
Bruit ambiant : propri´ et´ es et influence
Les auteurs montrent que les pulsations correctes sont les pôles de la corrélation verte de ce système. Calculs. Nous utilisons un lemme qui sera utile pour calculer la fonction de Green et la corrélation dans le domaine (ω, x). Elle montre la possibilité d'extraire de la corrélation de Green les paramètres physiques et géométriques de l'environnement et de l'instrumentation.
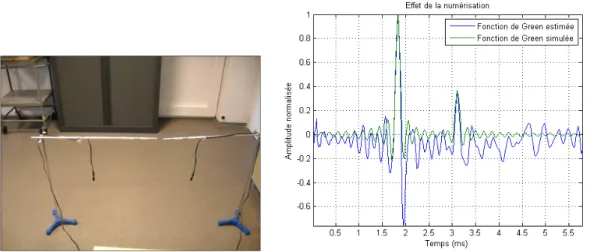
Il est difficile d’évaluer la précision de l’algorithme puisque nous ne disposons pas de la corrélation théorique de Green. Enfin, la numérisation des signaux entraîne une distorsion dans l'estimation de la fonction de Green ainsi que de la corrélation de Green. Pour quantifier l'évolution de la corrélation de Green, on observe en plus de l'argument.
En revanche, des expériences réalisées dans le béton ont montré que le suivi de la corrélation de Green offrait des avantages. Enfin, ce chapitre a mis en évidence le rôle de la corrélation de Green dans l'identification des milieux de propagation. Dans cette annexe, nous présentons une étude de la corrélation de Green et de l'identité de Ward associée pour un agent de propagation limité (homogène ou hétérogène).
L'expression exacte de la corrélation verte et de l'identité du département associée est présentée dans la section A.3.