Les facteurs limitants du contrôle actif que nous considérerons tour à tour dans ce document seront. Les systèmes de contrôle actif devant s'adapter à la propagation acoustique, les travaux de recherche sur l'étendue spatiale du contrôle portent sur l'optimisation des dispositifs.
Contrôle local vs. contrôle global
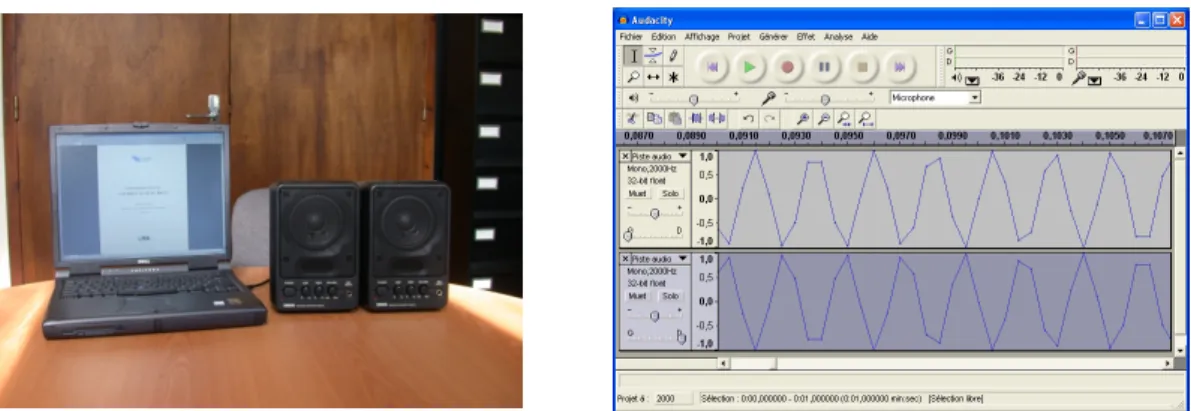
Une expérience domestique de contrôle actif
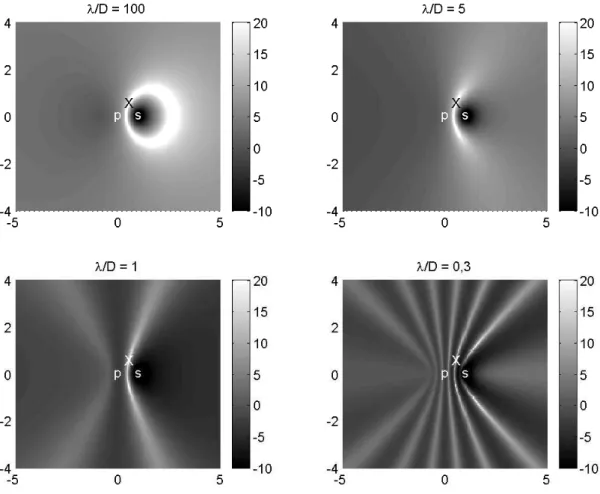
L'une des principales limites du contrôle actif concerne les méthodes de propagation acoustique : la dépressurisation d'une paire de microphones provoque rarement une atténuation sonore sur une grande surface de l'espace. Elle suggère également la principale limite concernant les modalités de propagation acoustique : le contrôle acoustique actif sera soit limité en fréquence soit, de deux manières, limité dans l'espace.
Quelques stratégies d’extension spatiale du contrôle
Dans une troisième étape, nous nous intéresserons à une stratégie de contrôle global surfacique, appelée BSC (pour Boundary Pressure Control), dont le principe repose sur une représentation intégrale de la pression acoustique. Cette stratégie a été mise en œuvre expérimentalement pour la première fois lors de la thèse de Nicolas Epain [14].
Décomposition en valeurs singulières d’un transfert secondaire
Principes d’un contrôle modal
Dans le cas d'un bruit primaire multifréquence, on peut considérer que le nombre de transducteurs à utiliser pour le contrôle actif sera indiqué par le plus grand nombre de modes à chacune des fréquences. Cependant, dans le cas d'un bruit large bande, la contrainte de causalité implique que les différentes composantes fréquentielles des signaux de commande envoyés par le système de commande aux sources secondaires ne soient pas indépendantes.
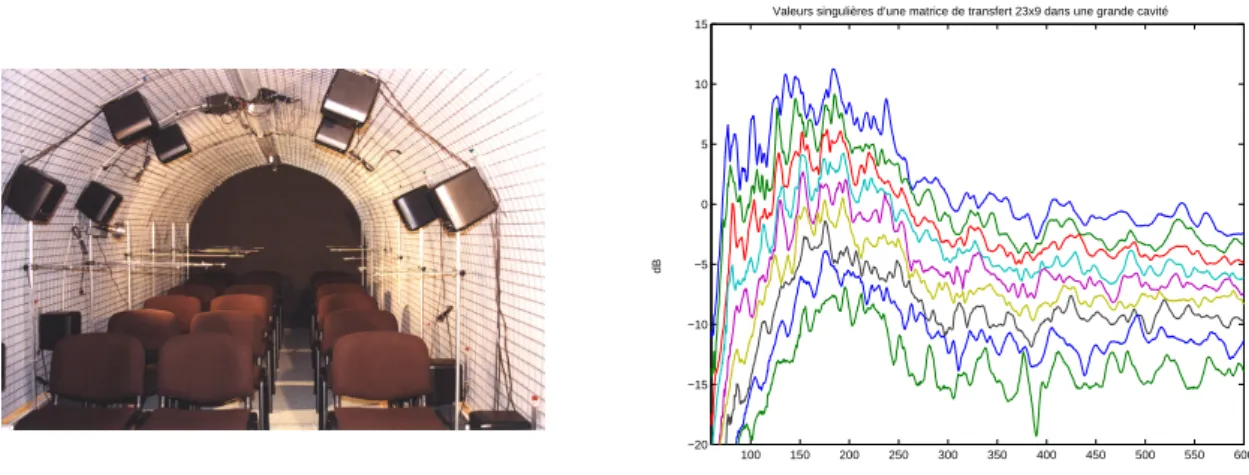
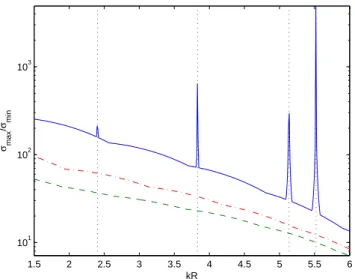
Estimation pratique du nombre de modes
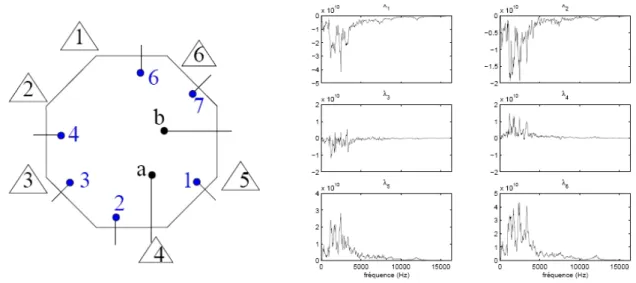
La figure montre également les valeurs singulières de la matrice de transfert électroacoustique dans cette cavité. Enfin, pour mémoire, la SVD de la matrice de transfert est à l'origine de la notion de "radiation modes" (modes de rayonnement), largement utilisée en monitoring vibro-acoustique actif depuis les années 1990 [12].
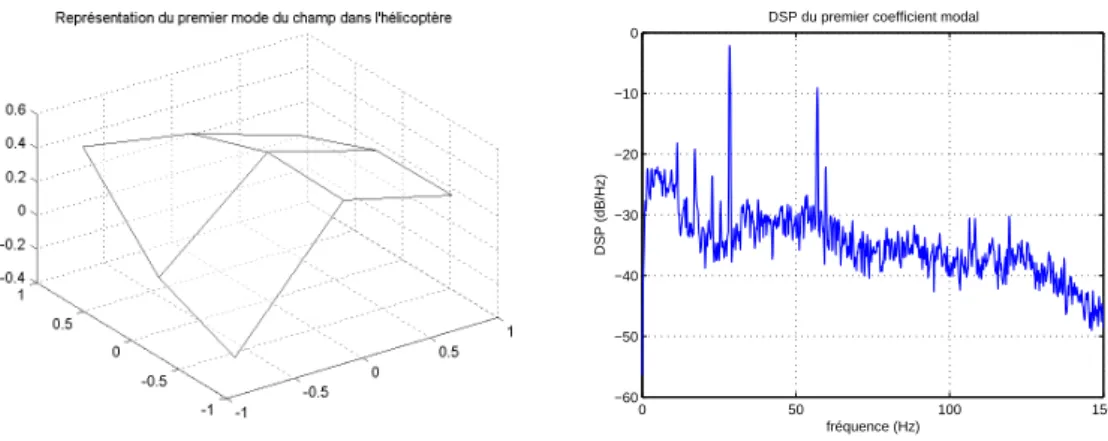
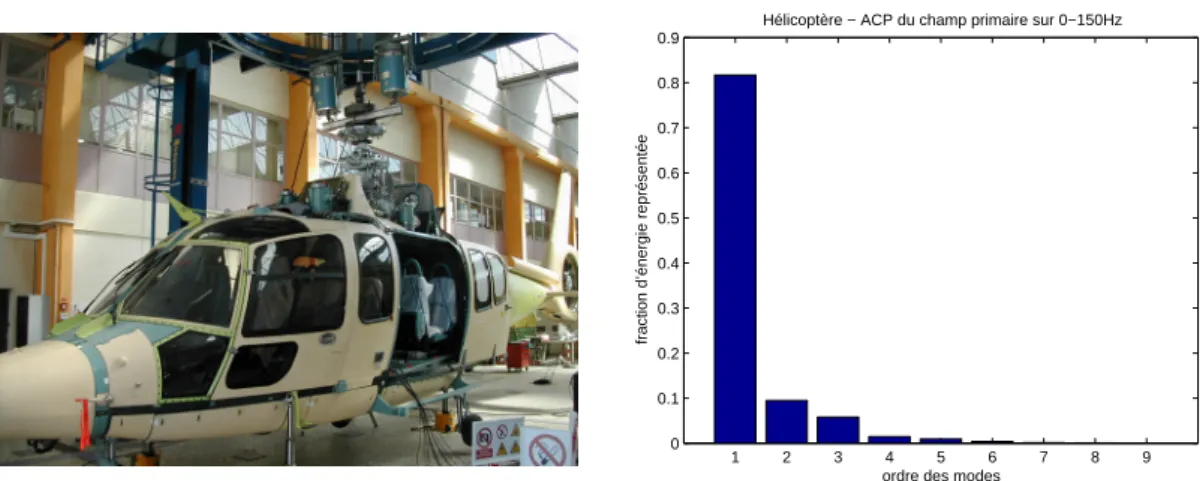
Analyse en composantes principales d’un champ primaire
Définition et propriétés
En notant N le plus petit des deux nombres nt et nr (en général N = nr), l'ACP de la pression acoustique est la décomposition de la matrice Pen en une somme de dyades. Contrairement aux bases issues de la SVD d'une matrice de transfert entre sources secondaires et capteurs de minimisation, la base issue de l'ACP présente plusieurs avantages a priori.
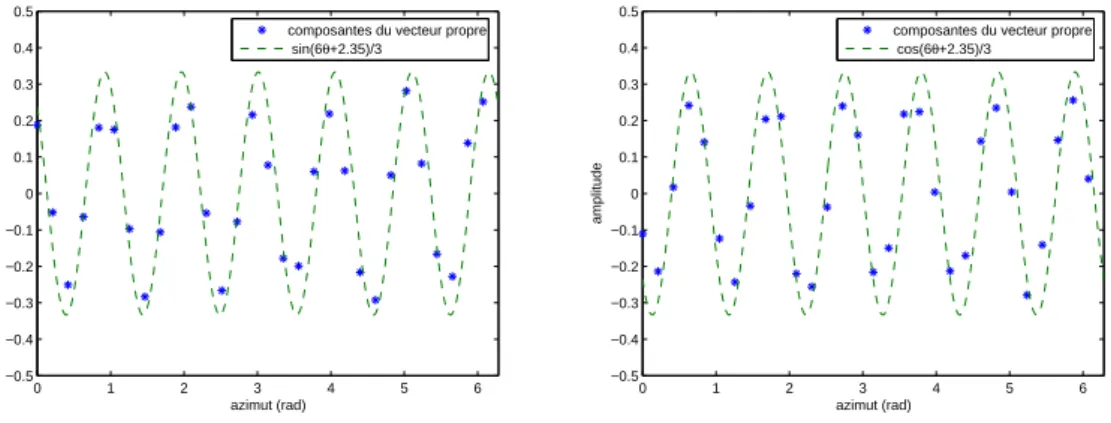
Liens entre ACP et modes acoustiques usuels
Dans le cas de certaines sections, les modes PCA ne peuvent pas être interprétés en termes de modes de propagation ordinaires (dont la géométrie dépend de la fréquence). Sinon, les modes PCA ne peuvent pas être identifiés avec des harmoniques sphériques.
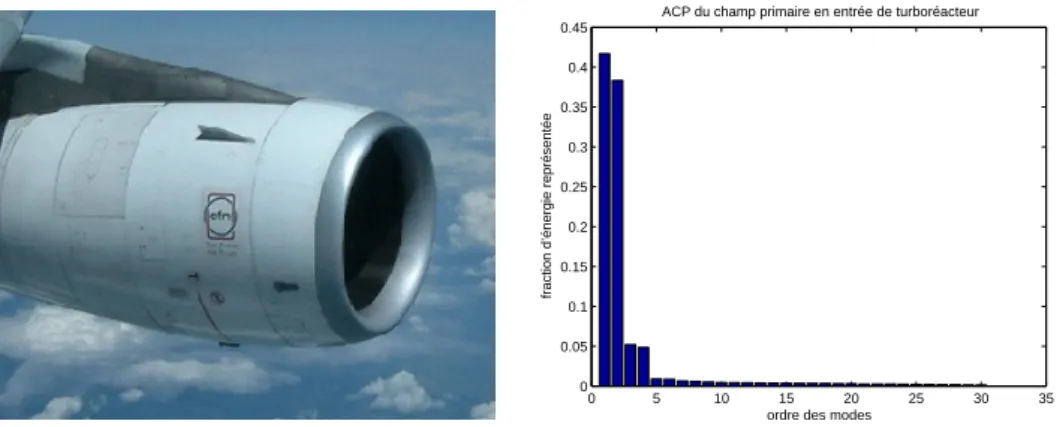
Application à l’optimisation du réseau de sources secondaires
Alors que les états issus de l'ACP sont parfois critiqués pour être fortement dépendants de l'excitation à laquelle est soumis le système en question, cette dépendance est un atout majeur en commande active où le dispositif de commande doit être précisément optimisé en fonction de l'excitation primaire.
Contrôle de la pression de surface
- Principe
- Mise en œuvre en temps-réel
- Simulations de contrôle sur des microphones directionnels
- Prédiction du contrôle optimal causal
- Anti-causalité en présence de réflexions
- Anti-causalité en champ libre
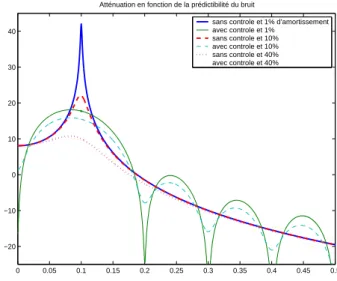
La figure 2.6 compare, pour un signal de référence qui détecte le bruit primaire plus ou moins longtemps à l'avance, les performances du contrôle causal optimal calculé à partir de la formule 2.1 avec celles d'un filtre de Wiener à 2048 coefficients. Avec les notations de la figure 2.8 et k indiquant le nombre d'onde, les signaux de pression acoustique p1 et p2 sont écrits sur les microphones de minimisation.
Traitement de sources instationnaires multiples
Cohérence vs. causalité
La bande de fréquence cible (300-3400Hz, qui équivaut à la bande passante téléphonique) et le fait que les casques soient ouverts et très légers rendent le contrôle de rétroaction inutile ; pour une commande anticipative, il est nécessaire de déterminer le ou les signaux de référence qui permettent une prédiction linéaire causale du bruit aux oreilles des opérateurs. Une autre possibilité est d'utiliser pour chaque oreille un seul microphone de référence plus proche de l'opérateur, ce qui favorise la cohérence entre les signaux de référence et de minimisation, a priori au détriment de la causalité de la prédiction.
Minimisation de signaux instationnaires
Une analyse plus complète [3] et d'autres mesures en chambre sourde ou dans un environnement plus réverbérant que les centres d'appels montrent que, bien que les sources de bruit soient instables, à large bande et réparties tout autour de l'oreille de mesure, le signal de minimisation à l'arrière de l'oreille l'oreille est relativement prévisible à partir d'une seule mesure acoustique, notamment parce qu'elle est colorée par la tête ; d'autre part, la complexité du champ acoustique, même dans un environnement peu réverbérant, suffit à rendre encore plus incohérents les signaux de référence et le bruit au fond de l'oreille. Ainsi, l'algorithme GMDF-α, excellent en annulation d'écho, n'est pas compatible avec les contraintes de causalité du contrôle actif dans le centre d'appel.
Quelques considérations psychoacoustiques
Performances d’un système «carré»
Aujourd'hui, il n'y a qu'une seule explication à cette limitation des performances observée dans les systèmes quadratiques : dans le cas des trajets multiples, un mauvais conditionnement de la matrice de transfert secondaire ralentit tellement la convergence de l'algorithme FXLMS qu'un contrôle optimal ne peut être atteint en pratique. Cependant, les performances de contrôle efficaces peuvent être prédites sans mettre en œuvre l'algorithme FXLMS : l'effet des modes lents peut être filtré dans le calcul du contrôle direct en organisant l'inversion de la matrice de transfert secondaire.
L-curve et TSVD
Enfin, il faut noter que, dans l'exemple présenté, ce n'est pas le niveau de commande maximal acceptable qui limite les performances de régulation (les enceintes ne saturent pas avec un algorithme FXLMS sans fuite) mais les constantes de temps dans les modes lents. Dans le cas monocanal, ce calcul de contrôle optimal avec régularisation de Tikhonov a l'inconvénient de limiter le contrôle alors qu'aucun problème de conditionnement ne ralentit la convergence de l'algorithme FXLMS.

Leakage vs. régularisation de Tikhonov
Critères de minimisation et notations
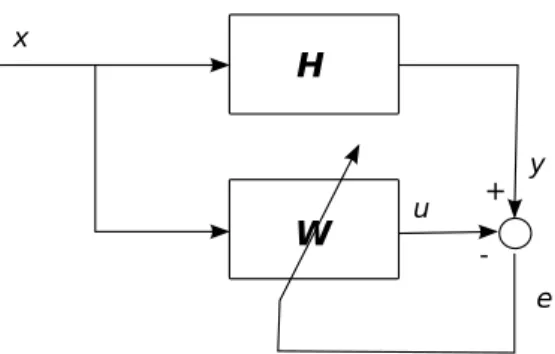
Dans le domaine fréquentiel, la régularisation de Tikhonov de l'inversion matricielle de la matrice H permet de déterminer le vecteur de transfert W(ω) qui minimise. H définit la matrice des transferts secondaires entre u et e, – kH(ω)k détermine la plus grande valeur singulière de H(ω), – F est le vecteur des transferts primaires entre x et e,.
Correspondance entre les critères fréquentiel et temporel
Un mauvais conditionnement du réseau de transmission secondaire limite les performances des systèmes à trajets multiples. Contrôle optimal par rétroaction de la transparence acoustique de la plaque équipée de transducteurs piézoélectriques.
Illustration numérique
Contrôle approximativement diagonal
- Stabilité
- Gain en performances
- Diagonalisation d’un dispositif donné
- Principes et mise en œuvre
- Contrôle d’état vs. contrôle FXLMS
Il est parfois possible de favoriser le caractère diagonal d'un contrôleur dès la conception. Dans le cas de milieux confinés, il n'est pas si aisé de concevoir des dispositifs de commande a priori dont l'approximation diagonale conduit à une commande stable.
Contrôle déporté avec l’algorithme SRMT
L’algorithme RMT
Une option est alors de déterminer à chaque fréquence à partir de mesures hors ligne la matrice primaire de transfert de bruit G entre les points où les microphones peuvent alors être placés et les points de minimisation souhaités ; pour viser la télécommande à ces points de minimisation dits « virtuels », on peut y estimer le vecteur des pressions primaires ppv à partir des pressions primaires aux micros dits « réels » ppr. En enregistrant des matrices de transfert HretHv mesurables hors ligne entre le contrôle des sources secondaires u et les microphones réels et virtuels, on enregistre le signal à minimiser pour le contrôle à distance de la pression sur les microphones virtuels, de la pression pr aux microphones réels.
L’algorithme SRMT
Si ˆg est l'approximation FIR d'une composante de la matrice de transfert ˆG, alors la formule de mise à jour est écrite pour un contrôle sur les microphones virtuels. Le contrôle SRMT, obtenu à partir de microphones réels placés sur la paroi de la cavité, donne des résultats comparables à la minimisation directe du bruit FXLMS.
Contrôle du champ diffracté
Estimation du champ diffracté
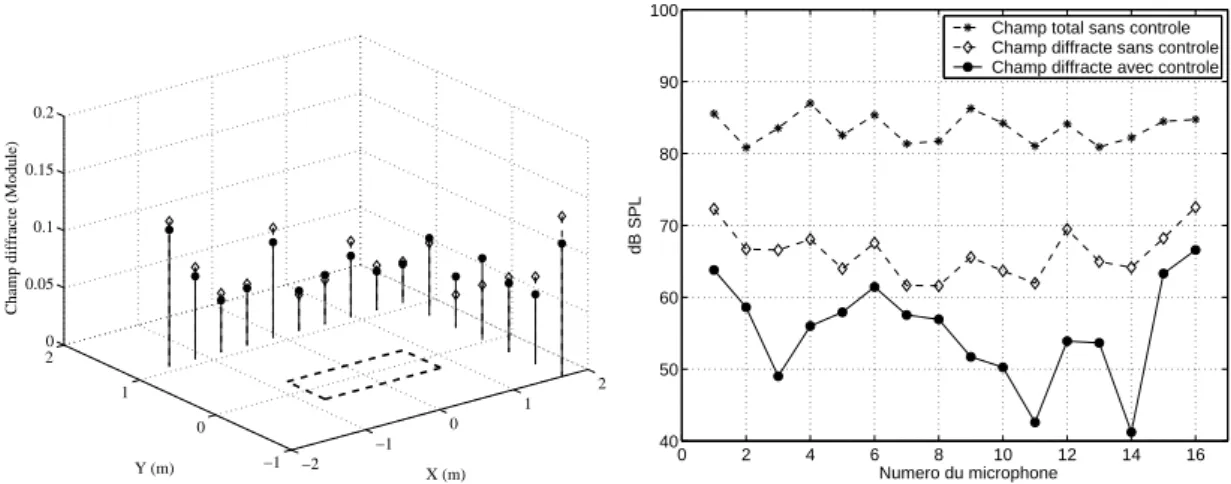
La représentation 4.7 montre que le champ diffracté pd est le résultat d'un filtrage de la pression acoustique totale p sur la surface, et de son gradient normal, par un opérateur linéaire indépendant des sources de bruit présentes autour de S. On peut donc définir la pression diffractée estimer , qui est une quantité purement conceptuelle, à partir de la pression totale réellement mesurée autour de l'objet en flexion ; cette estimation peut ensuite être minimisée par un contrôle actif par rétroaction avec un algorithme adaptatif ordinaire.
Mise en œuvre en temps réel
En dessous de la première de ces fréquences (√ .32ac pour un cube de côté a), la représentation 4.7 peut être discrétisée à l'aide des seules mesures de pression. La figure 4.8, extraite de [25], montre un résultat d'estimation et de contrôle de la pression déviée par le parallélépipède dans une chambre anéchoïque.
Application à l’assourdissement basse fréquence des chambres anéchoïques 73
Dans d'autres cas, une régulation suffisamment proche de l'optimum peut être calculée dans le domaine temporel à l'aide d'un algorithme FXLMS (Section 2.1.1) ou, si le nombre de voies de contrôle et de référence n'est pas trop important, sous la forme du filtre de Vienne. Le contrôle du champ dévié par chaque surface est possible à l'aide de transducteurs et d'un algorithme adaptatif commun.
Effet global d’un contrôle local
L'algorithme FXLMS (Filtered-X Least Mean Square, X désigne traditionnellement le signal de référence) est une variante de l'algorithme LMS bien adaptée à la détermination de la commande active. FRIOT E., Suspension semi-active du groupe motopropulseur à support souple hydroélastique, Thèse de l'Université de la Méditerranée, 1993.
Conditions d’atténuation globale
Tracés d’intensité acoustique
En fait, ce sont les haut-parleurs qui agissent comme des sources primaires et secondaires qui peuvent absorber l'énergie acoustique. La première chose à retenir est que le rendement acoustique d'une enceinte est généralement inférieur à 1 % ; la majeure partie de l'énergie qui lui est fournie est dissipée dans des circuits électriques.

Décomposition en valeurs singulières
La meilleure approximation du rang p de la matrice M au sens de la norme 2 (ie la matrice Mp qui minimise kM−Mpk2) est obtenue en tronquant le développement à l'ordre p. En particulier, cette propriété signifie que le rang d'une matrice est égal au nombre de valeurs singulières non nulles ; en pratique, on utilise SVD pour évaluer numériquement le rang de la matrice.
Transferts à phase minimale et factorisation spectrale
Par exemple, nous avons vu dans la section 1.2.2 que la SVD d'une matrice de transfert électroacoustique permettait d'évaluer le nombre de modes qui contribuent significativement à la propagation acoustique en milieu confiné ou non. Ainsi, on dispose d'un algorithme de factorisation efficace dans le cas d'une DSP scalaire, mais pas dans le cas général d'une matrice de DSP quelconque.
L’algorithme FXLMS
- L’algorithme LMS monovoie
- L’algorithme FXLMS monovoie
- Actes de colloques à comité de lecture (avec rapports d’expertise)
- Communications à des congrès (avec actes complets)
- Communications à des congrès (sans actes complets)
- Séminaires, workshops
- Autres
Friot E., Contrôle optimal par rétroaction de la transparence acoustique d'une plaque équipée de transducteurs piézoélectriques, Reports of the Academy of Sciences (1998), série IIb, 326, p.47–54. Friot E., Contrôle actif du bruit : limites et applications, Séminaire de l'Ecole Doctorale MEGA (Lyon), 4 février 2005.
Activités d’encadrement
A l'exception d'Aurélie Boudier, j'ai encadré les personnes listées ci-dessus pour leur stage DEA ou stage de Master 2. Par ailleurs, j'ai encadré plusieurs stagiaires Bac+4 en fin de MSc ou première année de MSc (Sara Masliah, Frank Gilly, Rémi Fahed) ou en deuxième année d'école d'ingénieur (Maxime Keller, Sandrine Espeillac et Thomas Pelletier).
Activités d’enseignement
Enfin, j'ai supervisé Marc Georgelin qui a fait son service national au LMA en tant que scientifique contingent.
Contrats de collaboration de recherche
Le projet CoMBE, qui répondait à l'appel de la Fondation nationale de la recherche aéronautique et spatiale pour des "avions peu bruyants", a reçu un financement d'un montant de 300 mille euros sur deux ans. Enfin, j'ai participé à divers rôles dans plusieurs contrats de coopération de recherche dans le domaine du contrôle actif coordonnés par Alain Roure au LMA (programmes européens Silence(R), Terria, Ranntac et Asanca ; contrats nationaux avec Renault, Snecma, Eurocopter. . ).
Autres activités diverses
Je suis régulièrement sollicité par des journalistes de la presse scientifique de vulgarisation pour des articles sur l'acoustique. J'ai été rapporteur pour le Natural and Sciences Engineering Research Council, un organisme qui finance la recherche au Canada.