unesp
UNIVERSIDADE ESTADUAL PAULISTA
Instituto de Biociˆencias, Letras e Ciˆencias ExatasDEPARTAMENTO DE CIˆENCIAS DE COMPUTAC¸ ˜AO E ESTAT´ISTICA
AN ´ALISE DE UM SISTEMA DIN ˆAMICO N ˜AO IDEAL COM EXCITAC¸ ˜AO VERTICAL E HORIZONTAL
Marcela Cristiani Ferreira
Disserta¸c˜ao de Mestrado
P´os-Gradua¸c˜ao em Matem´atica Aplicada
Rua Crist´ov˜ao Colombo, 2265
15054-000 - S˜ao Jos´e do Rio Preto - SP - Brasil Telefone: (017) 3221-2444
An´
alise de um sistema dinˆ
amico n˜
ao ideal com excita¸c˜
ao vertical e
horizontal
Marcela Cristiani Ferreira 1
Disserta¸c˜ao a ser apresentada no Instituto de Biociˆencias, Letras e Ciˆencias Exatas da
Uni-versidade Estadual Paulista “J´ulio de Mesquita Filho”, Campus de S˜ao Jos´e do Rio Preto,
S˜ao Paulo, para a obten¸c˜ao do t´ıtulo de Mestre em Matem´atica Aplicada.
Prof. Dr. Masayoshi Tsuchida
Professor Doutor
UNESP - S˜ao Jos´e do Rio Preto
Prof. Dr. Reyolando M. L. R. F. Brasil
Professor Associado
Universidade de S˜ao Paulo (USP)
Prof. Dr. Maur´ılio Boaventura
Professor Adjunto
UNESP- S˜ao Jos´e do Rio Preto
S˜ao Jos´e do Rio Preto
2007
1
contato: [email protected]
A Deus. `
A minha fam´ılia.
Ao meu namorado.
Aos meus amigos.
Dedico
Agradecimentos
A Deus, pela constante presen¸ca em todos os momentos da minha vida, iluminando,
protegendo e conduzindo os meus passos.
Agrade¸co imensamente aos meus pais Antˆonio e Benedita, e `a minha querida irm˜a
Natalia, pelo amor, carinho, e pelo apoio incondicional que sempre me dedicaram.
Ao meu namorado Beethoven, uma pessoa muito especial, agrade¸co o carinho, a
com-preens˜ao e o cuidado dedicados.
Aos amigos p´os-graduandos do DCCE e amigas de rep´ublica, agrade¸co pelas conversas,
pelas risadas e principalmente pela paciˆencia, que tornaram nossa convivˆencia t˜ao prazerosa
e cuja amizade e discuss˜oes sobre o trabalho foram muito valiosas.
Em especial, agrade¸co ao Prof. Dr. Masayoshi Tsuchida, pela amizade, orienta¸c˜ao,
incentivo e paciˆencia na elabora¸c˜ao deste trabalho.
Aos meus professores de gradua¸c˜ao e p´os-gradua¸c˜ao.
A todas as pessoas e funcion´arios do IBILCE que, direta ou indiretamente, contribu´ıram
para a elabora¸c˜ao deste trabalho. `
A CAPES pelo aux´ılio financeiro.
Resumo
Neste trabalho realizamos um estudo de um sistema dinˆamico n˜ao ideal, constitu´ıdo por
um pˆendulo acoplado a um bloco e que oscilam verticalmente. A oscila¸c˜ao ´e devida `a rota¸c˜ao
de uma massa desbalanceada e acionada por um motor DC, cuja fonte de energia ´e limitada.
Consideramos situa¸c˜oes em que as freq¨uˆencias do bloco e do pˆendulo est˜ao em ressonˆancias
internas 1:1, 1:2 e 2:1, e analisamos o comportamento do sistema bloco- motor-pˆendulo atrav´es
de simula¸c˜oes num´ericas.
Uma an´alise similar ´e levada a efeito, no caso em que o sistema dinˆamico ´e dotado de
uma excita¸c˜ao de suporte ideal horizontal do tipoF cosωt.
Palavras-chave: Sistema dinˆamico n˜ao ideal, mapas de Poincar´e, expoentes de Lyapunov, fonte de energia limitada.
Abstract
In this work we studied a nonideal dynamical system which is constituted by a pendulum
connected to a block, and that oscillates vertically. The oscillation is due to the rotation of
a unbalanced mass moved by DC motor with limited power supply. We consider situations
where the frequencies of the block and the pendulum are in 1:1, 1:2 and 2:1 internal resonances,
and we analyse the behavior of the block - motor - pendulum system through numerical
simulations.
A similar analysis is performed in the case where the dynamical system has a periodic
horizontal oscillation of type F cosωt.
Keywords: Non ideal dynamic system , Poincar´e maps , Lyapunov exponents, limited power supply.
Sum´
ario
Lista de Tabelas . . . ix
Lista de Figuras . . . xiv
1 Introdu¸c˜ao 1 2 Introdu¸c˜ao `a teoria de sistemas dinˆamicos 3 2.1 Equa¸c˜oes diferenciais e sistemas dinˆamicos . . . 4
2.2 Lineariza¸c˜ao . . . 7
2.2.1 Equivalˆencia Topol´ogica . . . 8
2.3 Espa¸cos de estados (ou espa¸cos de fases) . . . 8
2.4 Sistemas autˆonomos e n˜ao autˆonomos . . . 9
2.5 Estabilidade e ponto de equil´ıbrio . . . 10
2.5.1 Estabilidade . . . 11
2.6 Bifurca¸c˜ao . . . 13
2.6.1 Bifurca¸c˜oes de codimens˜ao um . . . 14
2.7 Mapas e sec¸c˜ao de Poincar´e . . . 17
2.8 Expoentes de Lyapunov . . . 19
2.9 Sistemas n˜ao-ideais . . . 20
3 O sistema dinˆamico n˜ao ideal 24 3.1 Equa¸c˜oes de movimento . . . 25
3.2 Pontos de equil´ıbrio do sistema . . . 29
3.3 Lineariza¸c˜ao em torno de um ponto de equil´ıbrio . . . 30
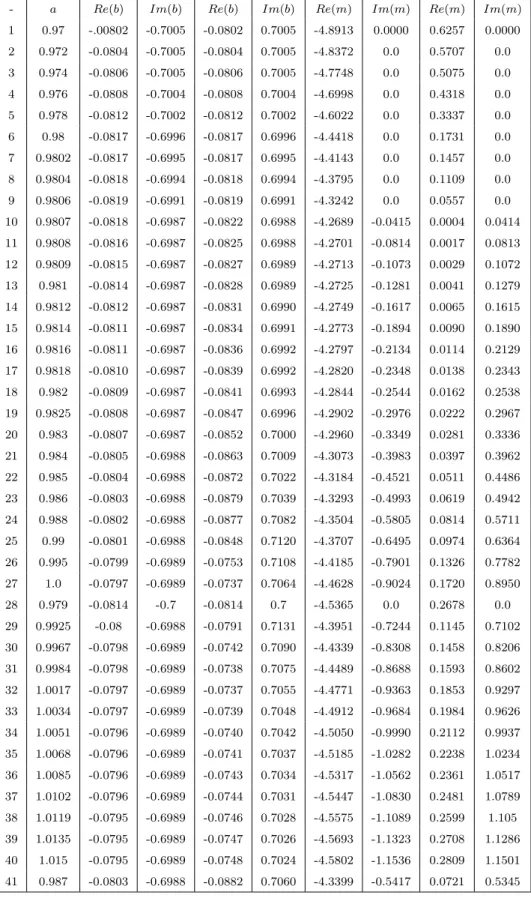
3.3.1 Estudo de autovalores da matriz Jacobiana variando a. . . 31
4 Simula¸c˜oes Num´ericas 37 4.1 Sistema dinˆamico com ressonˆancia interna . . . 39
Sum´ario viii
4.1.1 Torque exponencial . . . 47
5 Sistema dinˆamico com excita¸c˜ao ideal e horizontal do suporte 56 5.1 Simula¸c˜oes Num´ericas . . . 60
5.1.1 Ressonˆancias internas . . . 64
5.1.2 Torque exponencial . . . 77
6 Conclus˜ao e considera¸c˜oes finais 93
6.1 Conclus˜ao . . . 93
6.2 Pesquisas futuras . . . 95
Lista de Tabelas
3.1 Descri¸c˜ao dos parˆametros . . . 25
3.2 Parˆametros f´ısicos com ressonˆancia 1:1 . . . 31
3.3 Tabela da varia¸c˜ao de autovalores para ressonˆancia 1:1 . . . 32
3.4 Tabela da varia¸c˜ao de autovalores para ressonˆancia 1:1 . . . 34
4.1 Parˆametros f´ısicos sem ressonˆancia . . . 37
4.2 Autovalores para os parˆametros da tabela (4.1) . . . 38
4.3 Autovalores para ressˆonancia 1:1 . . . 43
4.4 Autovalores para ressˆonancia 2:1 . . . 44
4.5 Autovalores para ressˆonancia 1:2 . . . 49
Lista de Figuras
2.1 Ponto de equil´ıbrio est´avel. . . 11
2.2 Ponto de equil´ıbrio assintoticamente est´avel. . . 11
2.3 Ponto de equil´ıbrio inst´avel. . . 12
2.4 Bifurca¸c˜ao sela-n´o. . . 14
2.5 Bifurca¸c˜ao transcr´ıtica. . . 15
2.6 Bifurca¸c˜ao de forquilha supercr´ıtica (esquerda). Bifurca¸c˜ao de forquilha subcr´ıtica (direita). 16 2.7 Bifurca¸c˜ao de Hopf. . . 16
2.8 Significado geom´etrico da aplica¸c˜ao de Poincar´eP: x0´e uma ´orbita peri´odica,x∗0´e o ponto onde ela intercepta Σ;x1´e uma ´orbita n˜ao peri´odica que corta Σ emP(x′1)6=x′1. 18 2.9 Se¸c˜oes de Poincar´e : (a) unidimensional; (b) bidimensional . . . 19
2.10 A divergˆencia de trajet´orias vizinhas. . . 20
2.11 Fam´ılia de caracter´ısticas da fonte de energia (L0, L1, ..., L5). Forma exponencial (esquerda)e forma linear (direita). . . 22
3.1 O sistema estudado. . . 24
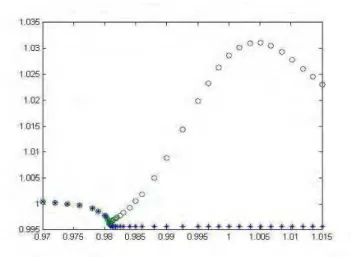
3.2 Gr´afico da parte real dos autovalores complexos conjugados correspondentes ao bloco, em fun¸c˜ao do parˆametro de controlea. . . 33
3.3 Gr´afico da parte imagin´aria (em valor absoluto) dos autovalores correspondentes ao bloco, em fun¸c˜ao dea. . . 33
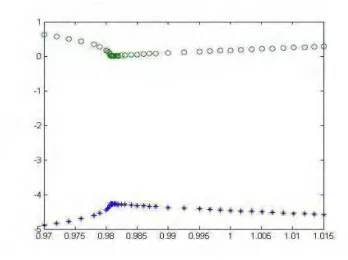
3.4 Gr´afico da parte real dos autovalores correspondentes ao motor, em fun¸c˜ao dea. . . 35
3.5 Gr´afico da parte imagin´aria dos autovalores correspondentes ao motor, em fun¸c˜ao dea. . . 35
3.6 Gr´afico da parte real dos autovalores correspondentes ao bloco em fun¸c˜ao dea(tabela 3.4). 35 3.7 Gr´afico da parte imagin´aria (em valor absoluto) dos autovalores correspondentes ao bloco, em fun¸c˜ao dea. . . 36
3.8 Gr´afico da parte real dos autovalores correspondentes ao motor em fun¸c˜ao dea. . . 36
Lista de Figuras xi
3.9 Gr´afico da parte imagin´aria dos autovalores correspondentes ao motor em fun¸c˜ao dea. . . . 36
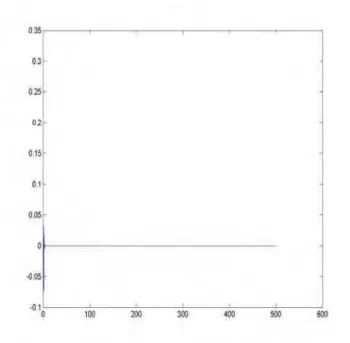
4.1 Vibra¸c˜ao do bloco em fun¸c˜ao do tempo para a = 0.82. Sistema dinˆamico sem ressonˆancia interna. . . 39
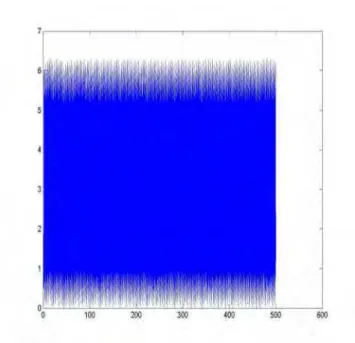
4.2 Oscila¸c˜ao do motor em fun¸c˜ao do tempo para a= 0.82. Sistema dinˆamico sem ressonˆancia interna. . . 39
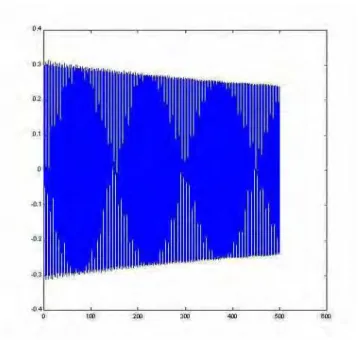
4.3 Movimento do pˆendulo em fun¸c˜ao do tempo paraa= 0.82. Sistema dinˆamico sem ressonˆancia interna. . . 40
4.4 Vibra¸c˜ao do bloco em fun¸c˜ao do tempo paraa= 1.0. Sistema dinˆamico sem ressonˆancia interna. 40 4.5 Rota¸c˜ao do motor em fun¸c˜ao do tempo paraa= 1.0. Sistema dinˆamico sem ressonˆancia interna. 41 4.6 Vibra¸c˜ao do bloco em fun¸c˜ao do tempo para a =0.82. Sistema dinˆamico sem ressonˆancia interna ec3= 0. . . 41
4.7 Oscila¸c˜ao do motor em fun¸c˜ao do tempo paraa =0.82. Sistema dinˆamico sem ressonˆancia interna ec3= 0. . . 42
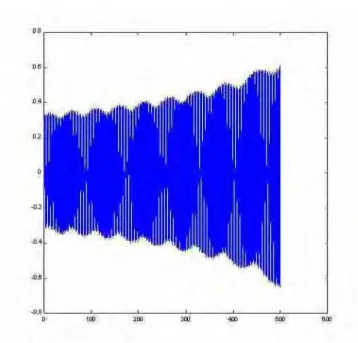
4.8 Movimento do pˆendulo em fun¸c˜ao do tempo paraa= 0.82. Sistema dinˆamico sem ressonˆancia interna ec3= 0. . . 42
4.9 Movimento do pˆendulo em fun¸c˜ao do tempo para ac = 0.980665 (valor cr´ıtico). Sistema dinˆamico sem ressonˆancia interna ec3= 0. . . 43
4.10 Ressonˆancia interna 1:1. Comportamento do bloco no tempo paraa= 0.82 ec3= 0. . . 43
4.11 Ressonˆancia interna 1:1. Comportamento do pˆendulo no tempo paraa= 0.82 ec3= 0. . . 44
4.12 Ressonˆancia interna 2:1. Comportamento temporal do bloco para a = 0.82. . . 44
4.13 Ressonˆancia interna 2:1. Comportamento temporal do motor para a = 0.82. . . 45
4.14 Ressonˆancia interna 2:1. Comportamento temporal do pˆendulo para a = 0.82. . . 45
4.15 Ressonˆancia interna 2:1: Comportamento temporal do bloco para a = 1.10. . . 46
4.16 Ressonˆancia 2:1. Comportamento temporal do motor para a = 1.10. . . 46
4.17 Ressonˆancia 2:1. Comportamento temporal do pˆendulo para a = 1.10. . . 47
4.18 Ressonˆancia interna 1:2. Comportamento do bloco no tempo paraa= 0.82. . . 47
4.19 Ressonˆancia interna 1:2. Comportamento do motor no tempo paraa= 0.82.. . . 48
4.20 Ressonˆancia interna 1:2 Comportamento do pˆendulo no tempo paraa= 0.82 . . . 48
4.21 Ressonˆancia interna 1:2. Comportamento do motor no tempo paraa= 1.10.. . . 49
4.22 Ressonˆancia interna 1:2. Comportamento do pˆendulo no tempo paraa= 1.10. . . 50
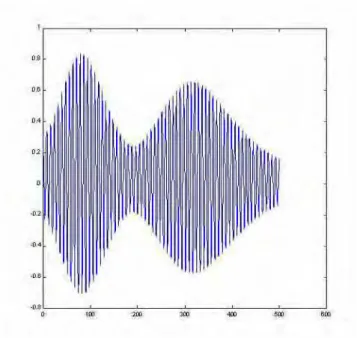
4.23 Torque exponencial. Comportamento temporal do bloco paraa= 0.980665. . . 50
Lista de Figuras xii
4.25 Torque exponencial. Expoente m´aximo de Lyapunov do sistema paraa= 0.980665. . . 51
4.26 Torque exponencial com ressonˆancia 1:1. Comportamento do bloco no tempo paraa= 5.0. . 52
4.27 Torque exponencial com ressonˆancia 1:1. Comportamento do pˆendulo no tempo paraa= 5.0. 52 4.28 Torque exponencial com ressonˆancia 1:1. Expoente m´aximo de Lyapunov do sistema para a= 5.0. . . 53
4.29 Torque exponencial com ressonˆancia 2:1. Comportamento temporal do bloco paraa= 0.981. 53 4.30 Torque exponencial com ressonˆancia 2:1. Comportamento temporal do pˆendulo paraa= 0.981. 54 4.31 Torque exponencial com ressonˆancia 2:1. Trajet´oria no espa¸co de fases do bloco paraa= 0.981. 54 4.32 Torque exponencial com ressonˆancia 2:1.Trajet´oria no espa¸co de fases do pˆendulo paraa= 0.981. 55 4.33 Torque exponencial com ressonˆancia 2:1. Expoente m´aximo de Lyapunov do sistema para a= 0.981. . . 55
5.1 O sistema com excita¸c˜ao horizontal e ideal do suporte. . . 56
5.2 Comportamento temporal do bloco paraa= 0.980665,F = 0.2 eω= 1.3109. . . 61
5.3 Comportamento temporal do motor paraa= 0.980665,F = 0.2 eω= 1.3109. . . 61
5.4 Comportamento temporal do pˆendulo paraa= 0.980665,F = 0.2 eω= 1.3109. . . 62
5.5 Mapa de Poincar´e referente ao pˆendulo para os valores: a= 0.980665,F = 0.2 eω= 1.3109. 62 5.6 Expoente m´aximo de Lyapunov referentes aos valores: a= 0.980665,F = 0.2 eω= 1.3109.. 63
5.7 Comportamento do bloco no tempo paraa= 2.0,F = 0.2 eω= 3.1316. . . 63
5.8 Comportamento do motor no tempo paraa= 2.0,F= 0.2 eω= 3.1316. . . 64
5.9 Comportamento do pˆendulo no tempo paraa= 2.0,F = 0.2 eω= 3.1316. . . 64
5.10 Mapa de Poincar´e referente ao pˆendulo para os valores: a= 2.0,F = 0.2 eω= 3.1316. . . . 65
5.11 Expoente m´aximo de Lyapunov referentes aos valores: a= 2.0,F = 0.2 eω= 3.1316. . . . 65
5.12 Comportamento do bloco paraa= 2.0,F = 1.0 eω= 3.1316. . . 66
5.13 Comportamento do pˆendulo paraa= 2.0,F = 1.0 eω= 3.1316. . . 66
5.14 Mapa de Poincar´e referente ao bloco para os valores: a= 2.0,F = 1.0 eω= 3.1316. . . 67
5.15 Mapa de Poincar´e referente ao bloco para os valores: a= 2.0,F = 1.0 eω= 3.1316. . . 67
5.16 Expoente m´aximo de Lyapunov referentes aos valores: a= 2.0,F = 1.0 eω= 3.1316. . . . 68
5.17 Comportamento do bloco paraa= 0.980665,F= 0.2 eω= 0.8086. . . 68
5.18 Comportamento do pˆendulo paraa= 0.980665,F= 0.2 eω= 0.8086.. . . 69
5.19 Expoente m´aximo de Lyapunov referentes aos valores: a= 0.980665,F = 0.2 eω= 0.8086.. 69
5.20 Comportamento do bloco paraa= 0.980665,F= 1.0 eω= 0.8086. . . 70
Lista de Figuras xiii
5.22 Expoente m´aximo de Lyapunov referentes aos valores: a= 0.980665,F = 1.0 eω= 0.8086.. 71
5.23 Comportamento do bloco paraa= 1.2,F = 0.2 eω= 0.4. . . 71
5.24 Comportamento do pˆendulo paraa= 1.2,F = 0.2 eω= 0.4. . . 72
5.25 Expoente m´aximo de Lyapunov referentes aos valores: a= 1.2,F = 0.2 eω= 0.4. . . 72
5.26 Expoente m´aximo de Lyapunov referentes aos valores: a= 0.980665,F = 1.0 eω= 1.2. . . 73
5.27 Comportamento do bloco paraa= 0.980665,F= 0.2 eω= 0.7094. . . 73
5.28 Comportamento do pˆendulo paraa= 0.980665,F= 0.2 eω= 0.7094.. . . 74
5.29 Expoente m´aximo de Lyapunov referentes aos valores: a= 0.980665,F = 0.2 eω= 0.7094.. 74
5.30 Comportamento do bloco paraa= 0.980665,F= 1.0 eω= 0.7094. . . 75
5.31 Comportamento do pˆendulo paraa= 0.980665,F= 1.0 eω= 0.7094.. . . 75
5.32 Expoente m´aximo de Lyapunov referentes aos valores: a= 0.980665,F = 1.0 eω= 0.7094.. 76
5.33 Comportamento do bloco paraa= 2.0,F = 0.2 eω= 1.4005. . . 76
5.34 Comportamento do pˆendulo paraa= 2.0,F = 0.2 eω= 1.4005. . . 77
5.35 Expoente m´aximo de Lyapunov referentes aos valores: a= 2.0,F = 0.2 eω= 1.4005. . . . 77
5.36 Comportamento do bloco paraa= 2.0,F = 1.0 eω= 1.4005. . . 78
5.37 Comportamento do pˆendulo paraa= 2.0,F = 1.0 eω= 1.4005. . . 78
5.38 Expoente m´aximo de Lyapunov referentes aos valores: a= 2.0,F = 1.0 eω= 1.4005. . . . 79
5.39 Comportamento do bloco paraa= 2.0,F = 0.2 eω= 2.0155. . . 79
5.40 Comportamento do pˆendulo paraa= 2.0,F = 0.2 eω= 2.0155. . . 80
5.41 Expoente m´aximo de Lyapunov referentes aos valores: a= 2.0,F = 0.2 eω= 2.0155. . . . 80
5.42 Comportamento do bloco paraa= 1.2,F = 0.5 eω= 2.5. . . 81
5.43 Comportamento do pˆendulo paraa= 1.2,F = 0.5 eω= 2.5. . . 81
5.44 Expoente m´aximo de Lyapunov referentes aos valores: a= 1.2,F = 0.5 eω= 2.5. . . 82
5.45 Torque exponencial. Comportamento do bloco paraa= 0.980665,F = 0.2 eω= 3.1316. . . 82
5.46 Torque exponencial. Comportamento do pˆendulo paraa= 0.980665,F = 0.2 eω= 3.1316. . 83
5.47 Torque exponencial. Expoente m´aximo de Lyapunov referentes aos valores: a= 0.980665,
F= 0.2 eω= 3.1316. . . 83
5.48 Torque exponencial. Comportamento do bloco paraa= 0.980665,F = 1.0 eω= 3.1316. . . 84
5.49 Torque exponencial. Comportamento do pˆendulo paraa= 0.980665,F = 1.0 eω= 3.1316. . 84
5.50 Torque exponencial. Expoente m´aximo de Lyapunov referentes aos valores: a= 0.980665,
F= 1.0 eω= 3.1316. . . 85
Lista de Figuras xiv
5.52 Torque exponencial. Comportamento do pˆendulo paraa= 2.0,F = 1.0 eω= 3.1316. . . . 86
5.53 Torque exponencial. Expoente m´aximo de Lyapunov referentes aos valores: a= 2.0,F= 1.0
eω= 3.1316. . . 86
5.54 Torque exponencial. Comportamento do bloco paraa= 2.0,F = 0.5 eω= 0.8086.. . . 87
5.55 Torque exponencial. Comportamento do pˆendulo paraa= 2.0,F = 0.5 eω= 0.8086. . . . 87
5.56 Torque exponencial. Comportamento do bloco paraa= 2.0,F = 1.0 eω= 0.8086.. . . 88
5.57 Torque exponencial. Comportamento do pˆendulo paraa= 2.0,F = 1.0 eω= 0.8086. . . . 88
5.58 Torque exponencial. Expoente m´aximo de Lyapunov referentes aos valores: a= 2.0,F= 1.0
eω= 3.1316. . . 89
5.59 Torque exponencial. Comportamento do bloco paraa= 2.0,F = 0.5 eω= 1.4005.. . . 89
5.60 Torque exponencial. Comportamento do pˆendulo paraa= 2.0,F = 0.5 eω= 1.4005. . . . 90
5.61 Torque exponencial. Expoente m´aximo de Lyapunov referentes aos valores: a= 2.0,F= 0.5
eω= 1.4005. . . 90
5.62 Torque exponencial. Comportamento do bloco paraa= 1.2,F = 1.0 eω= 0.5. . . 91
5.63 Torque exponencial. Comportamento do pˆendulo paraa= 1.2,F = 1.0 eω= 0.5. . . 91
5.64 Torque exponencial. Expoente m´aximo de Lyapunov referentes aos valores: a= 1.2,F= 1.0
Cap´ıtulo 1
Introdu¸c˜
ao
O in´ıcio do desenvolvimento da teoria de sistemas dinˆamicos est´a relacionado com as
investiga¸c˜oes da Mecˆanica Celeste [15]. Muitos estudos foram realizados nessa ciˆencia e assim
foi-se construindo teorias a respeito das solu¸c˜oes de equa¸c˜oes diferenciais e m´etodos de
re-solu¸c˜ao anal´ıtica. Por´em, somente ap´os muitos anos de pesquisa foi dado o ponto de partida
para a Teoria de Sistemas Dinˆamicos. Esse estudo ganhou um novo impulso a partir da
ob-serva¸c˜ao de que, em certas circunstˆancias, a fonte de perturba¸c˜ao e o sistema podem interagir.
Nesse caso, a fonte de perturba¸c˜ao ´e afetada pelo comportamento do sistema dinˆamico, e essa
intera¸c˜ao ocorre quando a energia da fonte excitadora ´e limitada. Sistemas dinˆamicos com
essa caracter´ıstica s˜ao denominados sistemas dinˆamicos n˜ao ideais.
Os primeiros trabalhos considerando sistemas dinˆamicos n˜ao ideais datam de 1940, e
s˜ao citados por Kononenko [11]. Em [13] apresenta-se uma an´alise de um sistema dinˆamico
composto por um motor que gira uma massa desbalanceada, e est´a montado sobre uma mesa
que pode oscilar horizontalmente. Esta mesa ´e acoplada lateralmente por amortecedor e mola. ´
E considerado que a fonte de energia ´e n˜ao ideal. Foi analisada a intera¸c˜ao entre a dinˆamica
da estrutura oscilante e a dinˆamica do motor.
Em [20] ´e apresentado um estudo de um sistema composto por um bloco com um motor e
um pˆendulo acoplados, e que est´a suspenso por um amortecedor e uma mola. Neste trabalho
´e assumido que a caracter´ıstica da curva de torque ´e linear (M = u1 +u2ϕ˙). Um estudo num´erico foi realizado tomando u2 fixo, e u1 como um parˆametro de controle.
Neste trabalho fazemos um estudo de um sistema dinˆamico semelhante ao estudado em
[20]. Um sistema muito parecido, s´o que com oscila¸c˜oes horizontais do bloco, ´e estudado
Cap´ıtulo 1 2
por Meirovitch [14] para mostrar uma aplica¸c˜ao do crit´erio de Routh-Hurwitz. Este sistema
dinˆamico ´e semelhante ao pˆendulo eletromotor analisado por Belato [3], [4]. Estudamos a
situa¸c˜ao em que o motor e o sistema interagem. Acrescentamos tamb´em uma excita¸c˜ao de
suporte horizontal ao sistema, para fazer com que o pˆendulo, acoplado ao bloco, realizasse
movimentos mais interessantes. Consideramos modelos linear e exponencial para o torque
do motor, e o comportamento do sistema ´e analisado sob condi¸c˜oes de ressonˆancias internas
1:1, 1:2 e 2:1. O torque do motor foi utilizado como parˆametro de controle, e para os casos
com oscila¸c˜ao horizontal variamos o torque do motor, a amplitude e a freq¨uˆencia da oscila¸c˜ao
horizontal. Um aspecto que foi discutido ´e um poss´ıvel surgimento de vibra¸c˜oes ca´oticas nesta
estrutura.
O objetivo de estudo deste trabalho foi um sistema dinˆamico n˜ao ideal constitu´ıdo por
um bloco suspenso por uma mola e um amortecedor. No bloco, est´a acoplado um pˆendulo e a
fonte de energia do sistema ´e um motor DC (motor el´etrico de corrente cont´ınua). O sistema
pode ser visto na figura (3.1).
Essa disserta¸c˜ao foi dividida em seis cap´ıtulos. No cap´ıtulo 2 apresentamos uma
in-trodu¸c˜ao `a teoria de sistemas dinˆamicos, a qual julgamos importante para a compreens˜ao
dos cap´ıtulos seguintes. N˜ao nos preocupamos em enunciar teoremas, e sim discorrer sobre o
assunto de maneira informal.
No cap´ıtulo 3, foi apresentado o sistema dinˆamico estudado neste trabalho, bem como
suas equa¸c˜oes de movimento e um breve estudo dos autovalores da matriz jacobiana em torno
de um ponto de equil´ıbrio est´avel. Atrav´es desse estudo dos autovalores, foi mostrado a
bifurca¸c˜ao do sistema. As equa¸c˜oes de movimento foram apresentadas usando o formalismo
de Lagrange [12].
No cap´ıtulo 4, apresentamos as simula¸c˜oes num´ericas realizadas. Foram mostrados
al-guns resultados para o sistema sem ressonˆancia e com ressonˆancias 1:1, 1:2 e 2:1. Essas
ressonˆancias s˜ao entre as freq¨uˆencias do bloco e do pˆendulo.
No cap´ıtulo 5, foi inserida a excita¸c˜ao de suporte horizontal ao sistema, e novas equa¸c˜oes
de movimento foram encontradas. Nesse cap´ıtulo tamb´em foram apresentadas as simula¸c˜oes
num´ericas para o sistema nessas condi¸c˜oes.
Cap´ıtulo 2
Introdu¸c˜
ao `
a teoria de sistemas
dinˆ
amicos
Umsistema pode ser definido como um conjunto de objetos agrupados por alguma intera¸c˜ao ou interdependˆencia, de modo que existam rela¸c˜oes de causa e efeito nos fenˆomenos que
ocorrem com os elementos desse conjunto. Um sistema ´edinˆamico quando algumas grandezas que caracterizam seus objetos constituintes variam no tempo. Leibniz foi o primeiro a usar a
palavradinˆamica nesse contexto.
De modo geral, a no¸c˜ao de sistemas dinˆamicos inclui os seguintes elementos [19]:
(i)Um espa¸co de fases ou espa¸co de estadosX, onde os pontos desse espa¸co representam os poss´ıveis estados do sistema.
(ii) O tempo, o qual pode ser discreto ou cont´ınuo. O sistema ´e dito discreto quando o tempo t ´e um n´umero inteiro positivo, ou seja, se t ∈ Z+. Um sistema ´e de tempo cont´ınuo se o tempot ´e um n´umero real positivo, ou seja, se t ∈R+.
(iii) Lei da evolu¸c˜ao. A evolu¸c˜ao de um sistema dinˆamico significa a mudan¸ca de posi¸c˜ao do sistema no decorrer do tempo t∈T, ondeT ´e um conjunto num´erico. A principal
componente de um sistema dinˆamico ´e uma lei de evolu¸c˜ao que determina a posi¸c˜ao xt ∈ X
do sistema no tempot, desde que sua posi¸c˜ao inicialx0 seja conhecida.
A evolu¸c˜ao de um sistema dinˆamico pode ser caracterizada pela trajet´oria que se propaga
com a passagem do tempo, em um dado espa¸co S. O espa¸co S pode ser pensado como um
espa¸co de estados ou algum sistema f´ısico. MatematicamenteSpode ser um espa¸co Euclidiano,
ou um subconjunto aberto do espa¸co Euclidiano de uma determinada dimens˜ao.
Formalizamos um sistema dinˆamico cont´ınuo atrav´es da seguinte defini¸c˜ao:
2.1. Equa¸c˜oes diferenciais e sistemas dinˆamicos 4
Um sistema dinˆamico [10] ´e uma aplica¸c˜aoφ C1
R×S−→S ondeS´e um conjunto aberto do espa¸co Euclidiano, e escrevemosφ(t, x) =φt(x). A aplica¸c˜aoφt:S →S satisfaz
(a) φ0 :S →S ´e a identidade;
(b) A composi¸c˜ao φt◦φs =φt+s para todo t, s∈R.
Note que a defini¸c˜ao implica que a aplica¸c˜ao φt : S → S ´e C1 para cada t e tem uma
inversa C1, φ
−t (fazer s =−t em (b)).
Seja Aum operador em um espa¸co vetorialE, seja E =S e φ:R×S →S definida por
φ(t, x) =etAx. Ent˜ao φ
t:S →S pode ser representado por φt =etA. Claramente, φ0 =e0 ´e o operador identidade, e desde que e(t+s)A=etA.esA, definimos um sistema dinˆamico em E.
Esse exemplo de sistema dinˆamico ´e representado pela equa¸c˜ao diferencial dx
dt = Ax
em E. Um sistema dinˆamico φt em S ´e, muitas vezes, dado por uma equa¸c˜ao diferencial.
Podemos reescrever isso em termos mais convencionais. Sejaφt:S →Sum sistema dinˆamico
ex∈S, seja x(t) =φt(x), e f :S →E como:
f(x) = d
dtφt(x) (1)
Ent˜ao podemos escrever (1) como
˙
x=f(x) (1′)
Assim, x(t) ou φt(x) ´e solu¸c˜ao de (1 ′
) satisfazendo a condi¸c˜ao inicialx(0) =x0.
A equa¸c˜ao (1′) ´e chamada de equa¸c˜ao autˆonoma porque n˜ao depende do tempo. Nesse
caso podemos considerar uma aplica¸c˜ao C1, f :I×W →E ondeI ´e um intervalo eW ´e um conjunto aberto de um espa¸co vetorial.
A equa¸c˜ao em outro caso ´e ˙x=f(t, x) e ´e chamada n˜ao-autˆonoma.
Nesse trabalho estudamos sistemas dinˆamicos cont´ınuos, ou seja, aqueles em quet ∈R+. A evolu¸c˜ao de um sistema cont´ınuo ´e governada por uma ou mais equa¸c˜oes diferenciais, que ´e
um tipo de equa¸c˜ao escrita em termos de derivadas da vari´avel desconhecidax∈S em rela¸c˜ao
ao tempot.
2.1
Equa¸c˜
oes diferenciais e sistemas dinˆ
amicos
H´a duas raz˜oes principais para se estudar sistemas lineares. A primeira ´e que v´arios fenˆomenos
2.1. Equa¸c˜oes diferenciais e sistemas dinˆamicos 5
´e que, por meio de um processo de lineariza¸c˜ao, pode-se realizar um estudo local de sistemas
n˜ao-lineares, atrav´es da an´alise do sistema linear associado (ver [15]).
A forma mais geral de se escrever uma equa¸c˜ao diferencial linear de ordem n ´e:
an(t)
dnx(t)
dtn +an−1(t)
dn−1x(t)
dtn−1 +...+a1(t)
dx(t)
dt +a0(t)x(t) =F(t) (2.1)
N˜ao h´a um m´etodo anal´ıtico geral para se obter a solu¸c˜ao explicita dessa equa¸c˜ao para
quaisquer coeficientes aj(t)(j = 0,1, ..., n) e entrada F(t). Ou seja, n˜ao h´a um m´etodo geral
para se obter a f´ormula que expressa como x varia em fun¸c˜ao de t.
O modo mais comum de definir um sistema dinˆamico de tempo cont´ınuo ´e usando
equa¸c˜oes diferenciais. Suponha que o espa¸co de estados do sistema ´eX =Rncom coordenadas
(x1, x2, ..., xn). Freq¨uentemente a lei de evolu¸c˜ao do sistema ´e dada implicitamente em termos
das velocidades ˙xi como fun¸c˜ao das coordenadas (x1, x2, ..., xn).
˙
xi =fi(x1, x2, ..., xn), i= 1,2, ..., n,
ou na forma vetorial
˙x=f(x), (2.2)
onde o vetor fun¸c˜aof :Rn
→Rn
´e diferenci´avel.
A fun¸c˜ao do lado direito de (2.2) ´e denominada um campo vetorial, dado que relaciona
um vetor f(x) para cada ponto x. A equa¸c˜ao (2.2) representa um sistema de n equa¸c˜oes diferenciais autˆonomas.
Uma equa¸c˜ao diferencial de ordem n pode ser reescrita na forma de um sistema de n
equa¸c˜oes diferenciais de primeira ordem. Fazemos essa transforma¸c˜ao atrav´es da defini¸c˜ao de
novas vari´aveis. Essa transforma¸c˜ao pode ser feita para a equa¸c˜ao (2.1) definindo-se x(t) ≡
x1(t) e:
dx1(t)
dt ≡x2(t)
dx2(t)
dt ≡x3(t)
2.1. Equa¸c˜oes diferenciais e sistemas dinˆamicos 6
dxn−1(t)
dt ≡xn(t)
dxn(t)
dt = F(t)
an(t)−
a0(t)
an(t)
x1(t)−
a1((t))
an(t)
x2(t)−...−an−1(t) an(t)
xn(t)
O estado de um sistema num instante t ´e especificado pelos valores das vari´aveis de estado xi(t)(i = 1,2, ..., n) nesse instante. O estado de um sistema, num dado momento
de sua hist´oria passada, constitui toda informa¸c˜ao que ´e necess´aria para se determinar sua
evolu¸c˜ao futura, num problema de condi¸c˜ao inicial. A escolha das vari´aveis de estado n˜ao ´e
´
unica, pois depende das condi¸c˜oes que o sistema oferece.
O sistema (2.3) ´e equivalente `a equa¸c˜ao (2.1). Entretanto, h´a algumas vantagens de
se escrever uma equa¸c˜ao diferencial de ordem n como n equa¸c˜oes diferenciais de primeira
ordem. Contudo, a principal vantagem de se trabalhar com n equa¸c˜oes de primeira ordem ´e
que existem trˆes t´ecnicas para se analisar um sistema dinˆamico:
•T´ecnica anal´ıtica: integram-se analiticamente as equa¸c˜oes, determinando a solu¸c˜ao em termos de f´ormulas gerais. Essa t´ecnica possui a desvantagem de que nem sempre ´e poss´ıvel
se determinar tais f´ormulas (quase nunca a integra¸c˜ao anal´ıtica ´e fact´ıvel).
•T´ecnica num´erica: integram-se numericamente as equa¸c˜oes, calculando-se valores para as vari´aveis dependentesx(t) = (x1(t), x2(t), ..., xn(t)) em pontos pr´e selecionados da vari´avel
independente t. A desvantagem desse m´etodo ´e que a solu¸c˜ao calculada ´e aproximada e s´o ´e
v´alida para a situa¸c˜ao calculada, ou seja, vale apenas para aqueles valores de condi¸c˜oes iniciais
e de parˆametros usados na integra¸c˜ao. Quando se altera algum desses valores, ´e necess´ario
integrar novamente as equa¸c˜oes do sistema.
• T´ecnica qualitativa: atrav´es de c´alculos anal´ıticos relativamente simples, temos uma id´eia de como o sistema evolui. Essa t´ecnica usa a descri¸c˜ao das vari´aveis de estado, e seus
resultados s˜ao representados no espa¸co de estados, tamb´em chamado de espa¸co de fases. A
desvantagem dessa t´ecnica ´e que parte da informa¸c˜ao quantitativa ´e perdida. Perde-se a
informa¸c˜ao sobre o comportamento transiente do sistema, isto ´e, sobre o comportamento que
2.2. Lineariza¸c˜ao 7
2.2
Lineariza¸c˜
ao
Em geral, ´e imposs´ıvel obter solu¸c˜oes anal´ıticas exatas de equa¸c˜oes diferenciais n˜ao lineares.
Por´em, sob determinadas condi¸c˜oes, um sistema n˜ao linear pode ser aproximado em torno
de um ponto de equil´ıbrio, por um sistema linear. Tal procedimento ´e conhecido como
line-ariza¸c˜ao. Estudando a aproxima¸c˜ao linear, pode-se, `as vezes, prever o comportamento das
solu¸c˜oes do sistema n˜ao linear na vizinhan¸ca do ponto de equil´ıbrio. Seja o sistema de equa¸c˜oes
diferenciais n˜ao lineares de primeira ordem.
˙
x1 =f1(x1, x2, ..., xn)
˙
x2 =f2(x1, x2, ..., xn)
... (2.4)
˙
xn =fn(x1, x2, ..., xn)
para o qual existe um ponto de equil´ıbrio x∗ = (x∗
1, x∗2, ..., x∗3). As fun¸c˜oes fi(x1, x2, ..., xn),
i= 1,2, ..., nem torno dex∗, podem ser aproximadas por equa¸c˜oes de retas, ou seja, equa¸c˜oes
lineares. Para isso, expandem-se essas fun¸c˜oes em s´erie de Taylor
dxi
dt =fi(x1, x2, ..., xn) =fi(x
∗
1, x∗2, ..., x∗n)+
∂fi
∂x1 |
x∗ (x1−x∗1)+
∂fi
∂x2 |
x∗ (x2−x∗2)+...+
∂fi
∂xn |
x∗ (xn−x∗n)+...
onde i= 1,2, ..., n. Retendo-se apenas a parte linear obt´em-se, em nota¸c˜ao matricial,
dx(t)
dt =Ax(t), (2.5)
sendo x o vetor coluna das vari´aveis de estado e A a matriz Jacobiana
x(t) =
x1−x∗1
x2−x∗2 ...
xn−x∗n
, A=
∂f1(x∗)
∂x1
∂f1(x∗)
∂x2 ...
∂f1(x∗)
∂xn
∂f2(x∗)
∂x1
∂f2(x∗)
∂x2 ...
∂f2(x∗)
∂xn ... ... ... ...
∂fn(x∗) ∂x1
∂fn(x∗)
∂x2 ...
∂fn(x∗) ∂xn
Assim, em determinadas condi¸c˜oes o estudo da estabilidade de um ponto de equil´ıbrio
de um sistema n˜ao linear reduz-se ao estudo do sistema linear correspondente, ao menos
localmente. De acordo com o teorema de Hartman-Grobman [6], a estabilidade de um ponto
2.3. Espa¸cos de estados (ou espa¸cos de fases) 8
nula) ´e preservada quando se lineariza o sistema em torno desse ponto, de modo que o retrato
de fases, na sua vizinhan¸ca, ´e topologicamente orbitalmente equivalente ao retrato de fases do
sistema linear associado. Dois retratos de fases s˜ao topologicamente orbitalmente equivalentes
quando um ´e a vers˜ao distorcida do outro. Se o ponto de equil´ıbrio ´e n˜ao-hiperb´olico, ou seja,
se h´a algum autovalor com parte real nula, ent˜ao a o teorema de Hartman-Grobman n˜ao pode
ser usado. Nesse caso, deve-se considerar termos de ordem superior, que foram desprezados
na expans˜ao em s´erie das fun¸c˜oes dxi
dt , ou usar outro m´etodo para determinar a estabilidade,
como o m´etodo direto de Lyapunov.
2.2.1
Equivalˆ
encia Topol´
ogica
Assuma que a fun¸c˜aoh(x) =y estabele¸ca uma rela¸c˜ao entre o conjunto x e o conjuntoy:
h1(x1, x2, ..., xn) = y1
h2(x1, x2, ..., xn) = y2 ... ...
hn= (x1, x2, ..., xn) = yn
Suponha que h seja uma fun¸c˜ao injetora e sobrejetora. Uma fun¸c˜ao com essas propri-edades ´e invert´ıvel, isto ´e, existe a fun¸c˜ao inversa h−1
(y) = x. Se h ´e cont´ınua, invert´ıvel e sua inversa h−1
´e cont´ınua, ent˜ao h´e chamada de homeomorfismo e o dom´ıniox e a imagem y s˜ao considerados homeom´orficos.
Dois retratos de fases que apresentam a mesma estrutura orbital s˜ao qualitativamente
equivalentes e, conseq¨uentemente, eles representam comportamentos dinˆamicos similares.
2.3
Espa¸cos de estados (ou espa¸cos de fases)
O espa¸co de estados, ou espa¸cos de fases, ´e um espa¸con-dimensional, cujos eixos coordenados
s˜ao o eixo-x1, eixo-x2, ..., eixo-xn. Um estado ´e representado como um ponto com coordenadas
x1(t), x2(t), ..., xn(t) nesse espa¸co. Conforme o tempo varia, esse ponto se move, sendo sua
evolu¸c˜ao temporal determinada pelas n equa¸c˜oes diferenciais de primeira ordem:
dx1
2.4. Sistemas autˆonomos e n˜ao autˆonomos 9
dx2
dt =f2(x1, x2, ..., xn, t)
... ...
dxn
dt =fn(x1, x2, ..., xn, t)
ou na nota¸c˜ao vetorial:
dx
dt =f(x, t).
As vari´aveis dependentes xi(i= 1,2, ..., n) s˜ao chamadas de vari´aveis de estado.
As fun¸c˜oes fi definem o campo de velocidades desse sistema, pois a velocidade
ins-tantˆanea ´e dada por
dx
dt =f.
A dimens˜ao do espa¸co de fases equivale ao n´umero de equa¸c˜oes de primeira ordem
necess´arias para descrever o sistema, que ´e igual ao n´umero de vari´aveis de estado. Por
exemplo, um plano ´e o espa¸co de fases para um sistema formado por duas equa¸c˜oes de primeira
ordem.
Chama-se retrato de fases o conjunto de curvas obtidas pela evolu¸c˜ao temporal do sis-tema a partir de todas as condi¸c˜oes iniciais nas quais as fun¸c˜oes fi s˜ao definidas.
2.4
Sistemas autˆ
onomos e n˜
ao autˆ
onomos
Um sistemaautˆonomo´e um conjunto de equa¸c˜oes diferenciais, lineares ou n˜ao lineares, sujeitas a fun¸c˜oes de entrada que n˜ao dependem explicitamente do tempo t [19].
Sistemas autˆonomos aparecem freq¨uentemente como modelos por duas raz˜oes:
(i) Muitos sistemas evoluem da mesma maneira, qualquer que seja o instante inicial t0. (ii) Muitos sistemas podem ser bem descritos pela evolu¸c˜ao de certas quantidades m´edias. M´edia, aqui, significa m´edia temporal, realizada numa escala de tempo que ´e curta
em compara¸c˜ao com a escala de tempo na qual se deseja visualizar a evolu¸c˜ao do sistema.
Se o tempo aparece explicitamente em algum coeficiente ou em alguma fun¸c˜ao de entrada,
2.5. Estabilidade e ponto de equil´ıbrio 10
Qualquer sistema n˜ao-autˆonomo, escrito na forma de n equa¸c˜oes de primeira ordem,
pode ser reescrito numa forma autˆonoma, definindo-se xn+1 ≡ t. Usando esse artif´ıcio, o sistema torna-se:
dx1
dt =f1(x1, x2, ..., xn, xn+1)
dx2
dt =f2(x1, x2, ..., xn, xn+1)
... ... (2.6)
dxn
dt =fn(x1, x2, ..., xn, xn+1)
dxn+1
dt = 1
O espa¸co de fases do sistema n˜ao-autˆonomo original tem dimens˜ao n. O espa¸co de fases
correspondente ao sistema n˜ao-autˆonomo, reescrito numa forma autˆonoma, ´e chamado de
espa¸cos de fases estendido, e possui dimens˜ao n+ 1.
2.5
Estabilidade e ponto de equil´ıbrio
Um ponto de equil´ıbrio ¯x ´e est´avel se toda solu¸c˜ao pr´oxima a ele permanece pr´oxima. Ele
´e assintoticamente est´avel se toda solu¸c˜ao pr´oxima n˜ao s´o permanece pr´oxima, mas tamb´em
tende a ¯x.
Considere um sistema de equa¸c˜oes diferenciais
˙x =f(x); f :W→Rn;W⊂Rn aberto. (2.7)
Suponhamos f ∈C1
. Um ponto ¯x∈W ´e um ponto de equil´ıbrio de (2.7) se f(¯x) =0. Claramente, a fun¸c˜ao constante x(t) = ¯x´e uma solu¸c˜ao de (2.7). Seja φ : Ω → W um fluxo associado a (2.7), Ω ⊂ R×W ´e um conjunto aberto, isto ´e, para cada x ∈ W a aplica¸c˜ao
t→φ(t,x) = φt(x) ´e uma solu¸c˜ao. Se ¯x´e um ponto de equil´ıbrio, ent˜ao φt(¯x) = ¯xpara todo
2.5. Estabilidade e ponto de equil´ıbrio 11
2.5.1
Estabilidade
A no¸c˜ao de estabilidade mais freq¨uentemente considerada ´e aquela geralmente atribu´ıda `a
Lyapunov. Um ponto de equil´ıbrio ´e est´avel se solu¸c˜oes pr´oximas permanecem pr´oximas para
qualquer tempo futuro.(ver [10])
Do ponto de vista matem´atico, temos
Defini¸c˜ao 2.1. Suponha ¯x ∈ W um ponto de equil´ıbrio do sistema (2.7). Ent˜ao, x¯ ´e um ponto de equil´ıbrio est´avel se para toda vizinhan¸caU de ¯xem W existe uma vizinhan¸caU1 de ¯
x tal que toda solu¸c˜ao x(t) com x(0)∈U est´a definido em U1 para todo t >0.
Figura 2.1: Ponto de equil´ıbrio est´avel.
Defini¸c˜ao 2.2. Se U1 pode ser escolhido como na defini¸c˜ao 2.1, e se limt→∞x(t) =¯x, ent˜ao ¯
x´e assintoticamente est´avel.
Figura 2.2: Ponto de equil´ıbrio assintoticamente est´avel.
Defini¸c˜ao 2.3. Um ponto de equil´ıbrio x¯ que n˜ao ´e est´avel, ´e chamado de inst´avel. Existe uma vizinhan¸ca U1 de x¯ tal que para toda vizinhan¸ca U de x, existe pelo menos uma solu¸c˜ao¯
x(t) passando por x(0) ∈U, que n˜ao est´a no interior de U1.
Considere o sistema denequa¸c˜oes diferenciais (2.2). O polinˆomio caracter´ıstico ´e obtido
2.5. Estabilidade e ponto de equil´ıbrio 12
Figura 2.3: Ponto de equil´ıbrio inst´avel.
os autovalores da matriz A tiverem a parte real diferente de zero, o ponto de equil´ıbrio
correspondente P∗ ´e chamado de hiperb´olico, independente do valor da parte imagin´aria. Quando pelo menos um autovalor tem a parte real nula, o ponto de equil´ıbrio ´e denominado
den˜ao-hiperb´olico.
Os pontos de equil´ıbrio hiperb´olicos podem ser classificados de trˆes formas quanto `a
estabilidade: atratores, repulsores, eselas([6] e [17]).
• Se todos os autovalores de A, reais ou complexos, tem a parte real negativa, o ponto de equil´ıbrio ´e chamado de atrator, sendo que neste caso o equil´ıbrio ´e assintoticamente
est´avel. Se todos os autovalores deAs˜ao complexos, ent˜ao o atrator ´e chamado defoco est´avel, e se todos os autovalores de A s˜ao reais, o atrator ´e chamado de n´o est´avel.
• Se todos os autovalores da matriz A, reais ou complexos, tem a parte real positiva, o ponto de equil´ıbrio ´e chamado de repulsor ou fonte. Se os autovalores s˜ao complexos, ent˜ao a fonte ´e chamada de foco inst´avel e, se todos os autovalores de A s˜ao reais, a fonte ´e chamada den´o inst´avel.
• Quando alguns autovalores (mas n˜ao todos) tˆem a parte real positiva e o restante tem a parte real negativa, ent˜ao o ponto de equil´ıbrio ´e chamado de sela.
Quanto `a estabilidade de pontos de equil´ıbrio n˜ao-hiperb´olicos, pode-se dizer que:
• Um ponto de equil´ıbrio n˜ao-hiperb´olico ´einst´avelse um ou mais autovalores deA tem a parte real positiva.
2.6. Bifurca¸c˜ao 13
• Se todos os autovalores da matriz A s˜ao imagin´arios puros e n˜ao-nulos, o ponto de equil´ıbrio ´e chamado de centro.
2.6
Bifurca¸c˜
ao
O termo bifurca¸c˜ao, introduzido por Poincar´e em 1885, refere-se `a mudan¸ca qualitativa do
retrato de fases de um sistema dinˆamico, conforme algum parˆametro do sistema passa por um
valor cr´ıtico [6]. A id´eia de bifurca¸c˜ao est´a intimamente ligada ao conceito de estabilidade
estrutural. Um sistema dinˆamico ´e estruturalmente est´avel, se ele ´e orbitalmente
topologica-mente equivalente a uma vers˜ao perturbada. Se, no entanto, ao se variar o valor do parˆametro
em torno de um valor cr´ıtico ocorre uma mudan¸ca qualitativa no seu retrato de fases, ent˜ao
o sistema dinˆamico ´e estruturalmente inst´avel, para aquele valor cr´ıtico do parˆametro. Essa
mudan¸ca na topologia do retrato de fases ´e chamada de bifurca¸c˜ao. Logo, uma bifurca¸c˜ao ´e uma mudan¸ca na topologia do sistema conforme o parˆametro passa atrav´es de um valor
cr´ıtico (ponto de bifurca¸c˜ao).
As bifurca¸c˜oes podem ser locais ou globais. Bifurca¸c˜oes locais s˜ao aquelas que podem
ser previstas estudando-se o campo vetorial na vizinhan¸ca de um ponto de equil´ıbrio ou uma
´orbita fechada. Normalmente esse estudo ´e realizado pelo c´alculo de autovalores. Bifurca¸c˜oes
globais s˜ao aquelas que n˜ao podem ser deduzidas a partir de uma an´alise local [15].
Seja algum valor α = α0 no sistema ˙x = f(x, α), e consideremos o maior conjunto de parˆametros pr´oximos (chamado camada) contendo α0 e composto por aqueles pontos para os quais o sistema tem um retrato de fases que ´e topologicamente equivalente `aquele de α0. Tomando todas as camadas tais que estejam no espa¸co de parˆametrosRm, obtemos o retrato
param´etrico do sistema, que junto com seu retrato de fases caracter´ıstico constituem um
diagrama de bifurca¸c˜ao [7].
Um diagrama de bifurca¸c˜ao de um sistema dinˆamico ´e uma estratifica¸c˜ao de seu espa¸co
de parˆametros induzida pela equivalˆencia topol´ogica, junto com o representativo retrato de
fases para cada camada.
Obt´em-se o diagrama de bifurca¸c˜ao como um resultado da an´alise qualitativa de um
sistema dinˆamico. Este classifica de maneira condensada, todos os poss´ıveis modos de
com-portamento do sistema e transi¸c˜oes entre eles (bifurca¸c˜oes) sob a varia¸c˜ao do parˆametro de
bi-2.6. Bifurca¸c˜ao 14
furca¸c˜oes de algum tipo. A seguir apresentamos algumas das bifurca¸c˜oes mais simples [9].
2.6.1
Bifurca¸c˜
oes de codimens˜
ao um
A codimens˜ao de uma bifurca¸c˜ao ´e o n´umero de parˆametros de controle para produzir a
bifurca¸c˜ao em quest˜ao. Variando-se o valor de um ´unico parˆametro, podem ocorrer quatro
bifurca¸c˜oes locais. A forma normal das bifurca¸c˜oes sela-n´o, transcr´ıtica e de forquilha s˜ao
dadas em sistemas unidimensionais; a forma normal da bifurca¸c˜ao de Hopf exige um sistema
bidimensional.
Bifurca¸c˜ao sela-n´o
A bifurca¸c˜ao sela-n´o, tamb´em conhecida como bifurca¸c˜ao tangente ou bifurca¸c˜ao de
dobra, ´e o mecanismo b´asico pelo qual um par de pontos de equil´ıbrio com estabilidades
contr´arias ´e criado ou destru´ıdo. Seja a equa¸c˜ao diferencial:
dx
dt =fµ(x) = µ−x
2.
Para µ < 0, n˜ao temos ponto de equil´ıbrio. Para µ = 0, existe um ´unico ponto de
equil´ıbrio est´avel na origem com autovalor 0. Paraµ >0, existe um ponto de equil´ıbrio est´avel
√µ com autovalor −2√µ, e um ponto de equil´ıbrio inst´avel −√µ com autovalor 2√µ. Dois
pontos de equil´ıbrio s˜ao criados quando µpassa por 0, e µ= 0 ´e um valor cr´ıtico do sistema.
Na figura (2.4), o diagrama de bifurca¸c˜ao mostra a posi¸c˜ao do ponto de equil´ıbrio versus o
parˆametro de controleµ. A linha cont´ınua indica o conjunto est´avel e a linha tracejada, indica
conjunto inst´avel.
Figura 2.4: Bifurca¸c˜ao sela-n´o.
Bifurca¸c˜ao Transcr´ıtica
Esta bifurca¸c˜ao faz com que a estabilidade de dois pontos de equil´ıbrio seja trocada para
2.6. Bifurca¸c˜ao 15
Considere o sistema de primeira ordem
˙
x=µx−x2.
Para qualquer valor de µ, existem dois pontos de equil´ıbrio, um na origem e outro em
x=µ. O ponto de equil´ıbrio na origem possui autovalor igual a µ, ent˜ao este ´e est´avel para
µ < 0 e inst´avel para µ > 0. O ponto x = µ possui autovalor igual a −µ, ent˜ao este ´e
est´avel para µ > 0 e inst´avel para µ < 0. Uma bifurca¸c˜ao ocorre em µ = 0, sendo este um
valor cr´ıtico, e o ponto de equil´ıbrio muda o tipo de estabilidade. O diagrama de bifurca¸c˜ao
´e mostrado na figura (2.5).
Figura 2.5: Bifurca¸c˜ao transcr´ıtica.
Bifurca¸c˜ao de Forquilha (Pitchfork)
Essa bifurca¸c˜ao aparece em sistemas f´ısicos com algum tipo de simetria. Um par de
pontos de equil´ıbrio de mesma estabilidade aparece e desaparece simultaneamente, quando o
parˆametro de controle passa por um valor cr´ıtico. Considere o sistema de primeira ordem
˙
x=µx−x3.
Para qualquer tipo de µ, existe um ponto de equil´ıbrio na origem. Seu autovalor ´e igual
a µ, e ent˜ao ´e est´avel para µ <0 e inst´avel para µ >0. Para µ >0, existem dois pontos de
equil´ıbrio a mais, ±√µ. Ambos pontos de equil´ıbrio tˆem autovalor igual a −2µ, e os pontos
de equil´ıbrio s˜ao est´aveis. Uma bifurca¸c˜ao ocorre em µ = 0, sendo este um valor crit´ıco, o
ponto de equil´ıbrio na origem muda o tipo de estabilidade e dois novos pontos de equil´ıbrio
s˜ao criados. O diagrama de bifurca¸c˜ao ´e mostrado na figura (2.6).
Bifurca¸c˜ao de Hopf
2.6. Bifurca¸c˜ao 16
Figura 2.6: Bifurca¸c˜ao de forquilha supercr´ıtica (esquerda). Bifurca¸c˜ao de forquilha subcr´ıtica (direita).
imagin´arios no ponto de bifurca¸c˜ao. Considere o sistema de segunda ordem:
˙
x=y−x(x2 +y2 −µ)
˙
y=−x−y(x2+y2−µ).
O sistema tem um ponto de equil´ıbrio na origem com autovalores iguais a µ±i onde
i =√−1. Para µ < 0, o ponto de equil´ıbrio ´e est´avel. Quando µ= 0, o ponto de equil´ıbrio
torna-se n˜ao hiperb´olico (possui autovalores imagin´arios puros), e para µ > 0, o ponto de
equil´ıbrio ´e inst´avel. Al´em disso, um ciclo limite est´avel, dado pela solu¸c˜ao de x2+y2 = µ, existe paraµ >0. Dado que o ponto de equil´ıbrio muda sua estabilidade em µ= 0, este ´e um
valor cr´ıtico. O aparecimento de um par de autovalores conjugados complexos na passagem
pelo eixo imagin´ario, criando assim um ciclo limite, ´e chamada bifurca¸c˜ao de Hopf.
O diagrama de bifurca¸c˜ao ´e mostrado na figura (2.7). Para cada valor de µ = µ0, o sistema ´e descrito no plano definido porµ=µ0, e a superf´ıcie parab´olica indica o ciclo limite.
2.7. Mapas e sec¸c˜ao de Poincar´e 17
2.7
Mapas e sec¸c˜
ao de Poincar´
e
Denominamos mapa um sistema dinˆamico que evolui no tempo de uma forma discreta. Seja um sistema dinˆamico cont´ınuo n˜ao-linear e o fluxo φt a ele associado. Esse fluxo pode
dar origem a um mapa
xi+1 =Fµ(xi), (2.8)
ondex´e um vetorn-dimensional,Fµ´e uma fun¸c˜ao n˜ao-linear (µ´e o parˆametro de controle), ei
representa os passos temporais fixos e discretos, ou passagens sucessivas por uma superf´ıcie de
sec¸c˜ao do fluxo. Se o fluxoφt´e liso (r-vezes continuamente diferenci´avel) ent˜aoF ´e um mapa
liso com uma inversa lisa, i.e., um difeomorfismo. A ´orbita do mapa ser´a ent˜ao a seq¨uˆencia
de pontos (xi)−∞+∞ definida pela equa¸c˜ao (2.8), que ´e genericamente denominada uma equa¸c˜ao
de diferen¸cas. Equa¸c˜oes de diferen¸cas podem tamb´em ser lineares, e nesse caso xi+1 =Bxi e
qualquer ponto inicial gera uma ´unica ´orbita, desde que B n˜ao tenha autovalores nulos (caso
degenerado) [6].
Uma das maneiras pela qual um fluxo cont´ınuo d´a origem a um mapa discreto ´e pela
utiliza¸c˜ao de sec¸c˜oes de Poincar´e. A sec¸c˜ao de Poincar´e ´e uma maneira de reduzir o estudo
de um fluxo num espa¸co de fases comn dimens˜oes a uma aplica¸c˜ao (difeomorfismo), chamada
mapa de Poincar´e ou mapa de retorno (“return map”), num espa¸co de fases com (n −1)
dimens˜oes.
Considere por exemplo a equa¸c˜ao
¨
x+g(x,x˙) = f(t), (2.9)
ondef(t) ´e uma fun¸c˜ao peri´odica de per´ıodoT. O diagrama de fases de (2.9) ´e tridimensional, e
cada estado ´e representado por (x,x, t˙ ). Nesse caso omapa de Poincar´e´e obtido simplesmente considerando-se a intersec¸c˜ao da trajet´oria com o plano (x,x˙) (sec¸c˜ao de Poincar´e) toda vez
quet for igual a um m´ultiplo de T.
Introduzimos agora o conceito de mapa de Poincar´e. Seja o sistema dinˆamico autˆonomo
n-dimensional, com solu¸c˜oes peri´odicas
˙
x=f(x), x= (x1, x2,· · · , xn), (2.10)
ondef(x) ´e um campo vetorial n˜ao linear. Sejax0 uma ´orbita peri´odica (per´ıodoT) associada
2.7. Mapas e sec¸c˜ao de Poincar´e 18
de tal maneira que o fluxo seja transversal a ela. Sejax∗
0 o ponto onde a ´orbitax0 intercepta
Σ (fig. 2.8) eU ⊆Σ uma vizinhan¸ca dex∗
0 . Ent˜ao o mapa de Poincar´eP :U →Σ ´e definido
para um ponto x′
1 ∈U por
P(x′
1) =φ(x′1, τ),
onde τ =τ(x′
1) ´e o tempo necess´ario para que a ´orbitaφ(x1,t) que parte de x′1 retorne pela
primeira vez a Σ. Em geralτ depende dex′
1, masτ →T quandox′1 →x∗0 . A hipersuperf´ıcie
Σ ´e chamada sec¸c˜ao de Poincar´e.
Figura 2.8: Significado geom´etrico da aplica¸c˜ao de Poincar´eP: x0 ´e uma ´orbita peri´odica, x∗0 ´e o
ponto onde ela intercepta Σ;x1 ´e uma ´orbita n˜ao peri´odica que corta Σ em P(x′1)6=x′1.
Uma ´orbita peri´odica corresponde a um ponto fixo x∗
0 da aplica¸c˜ao P, isto ´e,
P(x∗
0) =x∗0.
Em particular, a estabilidade de x∗
0 relativamente `a aplica¸c˜aoP reflete a estabilidade da
´orbita peri´odicax0 com rela¸c˜ao ao fluxoφ(t). Na fig.(2.8) ´e representada a ´orbita peri´odicax0
(que passa por x∗
0) e aquela n˜ao peri´odica x1. Dessa figura pode-se depreender o significado
geom´etrico de P. P tem valores em Σ, que ´e (n−1) dimensional. Mas x s´o pode variar em Σ; ent˜ao P ´e um mapa (n−1) dimensional.
Na Fig.(2.9) mostra-se como fluxos em duas e trˆes dimens˜oes d˜ao origem a mapas
uni-dimensionais e biuni-dimensionais. Definido sobre a superf´ıcie transversal ao fluxo, o mapa de
Poincar´e relaciona um ponto do fluxo ao seu primeiro ponto de cruzamento com essa mesma
2.8. Expoentes de Lyapunov 19
Figura 2.9: Se¸c˜oes de Poincar´e : (a) unidimensional; (b) bidimensional
2.8
Expoentes de Lyapunov
Considera-se uma trajet´oria descrita por uma determinada evolu¸c˜ao. O expoente de Lyapunov
associado a esta trajet´oria ´e uma medida m´edia da expans˜ao e contra¸c˜ao de trajet´orias que
est˜ao pr´oximas a ela [9]. O expoente de Lyapunov mede o crescimento exponencial quanto
`a perturba¸c˜ao de uma trajet´oria, para determinado ponto no espa¸co de estado. Usando
o expoente de Lyapunov pode-se distinguir pontos fixos, movimentos peri´odicos e
quase-peri´odicos, e movimentos ca´oticos [16]. Sup˜oe-se ent˜ao um fluxo φ(t) e a evolu¸c˜ao deste a
partir de duas condi¸c˜oes iniciais pr´oximas x0 e y0 =x0+ǫ0 tal que
|y0−x0| ≤ǫ0(x0). (2.11)
Note que esta proximidade (raio da vizinhan¸ca da ´orbita x0) depende das condi¸c˜oes iniciais.
O expoente de Lyapunov mede o crescimento exponencial da perturba¸c˜aoǫk(t) (figura 2.10) e pode ser definido como
λi = lim
t→∞ǫ0(limx0)→0 1
t ln ǫi(t)
ǫ0(x0)
2.9. Sistemas n˜ao-ideais 20
Logo,
ǫi(t)∼ǫ0(x0)eλit (2.13)
Figura 2.10: A divergˆencia de trajet´orias vizinhas.
Na pr´atica calcula-se analiticamente expoentes de Lyapunov em pouqu´ıssimos casos, mas
existem v´arias estimativas num´ericas para este valor [8]. Neste caso, calcula-seλpara
diferen-tes condi¸c˜oes iniciais e faz-se uma m´edia sobre os valores obtidos. Para um n´umero de itera¸c˜oes
suficientemente grande, o expoente de Lyapunov deixa de depender da condi¸c˜ao inicial. Os
expoentes de Lyapunov permitem obter informa¸c˜oes valiosas com respeito `a estabilidade local
de um atrator. Como em (2.13) tem-se uma medida de divergˆencia, pode-se concluir que a
existˆencia de um ou mais expoentes de Lyapunov positivos define uma instabilidade orbital,
o que permite concluir que: uma primeira condi¸c˜ao para a ocorrˆencia de atratores estranhos (dinˆamica ca´otica) para sistemas cont´ınuos ´e a existˆencia de pelo menos um expoente positivo. Pode-se observar ainda que, no caso de solu¸c˜oes peri´odicas ou quase-peri´odicas, λi < 0 nas
dire¸c˜oes perpendiculares ao movimento, pois espera-se que esse deslocamento diminua com o
tempo, e λi = 0 ao longo da trajet´oria, visto que este deslocamento n˜ao deve se alterar. Por
outro lado, se Pmi=1λi <0 tem-se uma diminui¸c˜ao do volume no espa¸co de fases e o sistema
torna-se dissipativo. Conclui-se ent˜ao que: uma segunda condi¸c˜ao para a ocorrˆencia de atra-tores estranhos em sistemas cont´ınuos ´e Pmi=1λi < 0, o que garante a contra¸c˜ao do espa¸co
de fases. E, como terceira condi¸c˜ao para existˆencia de movimentos ca´oticos: a dimens˜ao do espa¸co de fases deve ser no m´ınimo tridimensional.
2.9
Sistemas n˜
ao-ideais
Chamamos de sistemas n˜ao ideais os sistemas cuja excita¸c˜ao ´e provocada por agentes com
2.9. Sistemas n˜ao-ideais 21
oscilante, considera-se tamb´em que a a¸c˜ao do agente excitador depende do movimento do
sistema oscilante. Neste caso n˜ao existe uma lei espec´ıfica de varia¸c˜ao de sua for¸ca que possa
ser determinada por uma fun¸c˜ao dependente simplesmente do tempo. A for¸ca de excita¸c˜ao
deve depender das coordenadas de movimento e velocidade do agente e do sistema. No caso de
sistemas com fonte de energia ideal ou ilimitada, a resposta do sistema oscilante ao perturbador
´e desprezada, isto ´e, n˜ao ´e levada em conta. Logo, sua for¸ca excitadora pode ser escrita apenas
como uma fun¸c˜ao do tempo t . A formula¸c˜ao de um sistema n˜ao ideal deve incluir ent˜ao um
termo R(ϕ,ϕ, x,˙ x˙), com ϕ e x coordenadas de movimento do agente excitador e do sistema
oscilante respectivamente, que descreve a influˆencia do sistema oscilante sobre o agente.
Pode-se acrescentar ainda um termoQ(x,x, ϕ,˙ ϕ˙) que expressa o acoplamento do sistema oscilante
com a fonte n˜ao ideal, considerando termos n˜ao lineares que seriam desprezados na formula¸c˜ao
convencional. Ambos s˜ao obtidos na determina¸c˜ao das equa¸c˜oes diferenciais do movimento.
Logo, o movimento de um sistema oscilante excitado por uma fonte de energia n˜ao ideal, com
n graus de liberdade, pode, de um modo geral, ser descrito pelas equa¸c˜oes:
(mi1x¨1 +βi1x˙1+ci1x1) + (mi2x¨2+βi2x˙2+ci2x2) +...+ (minx¨n+βinx˙n+cinxn) =
Qi(x1;x2;...;xn; ˙x1; ˙x2;...; ˙xn;ϕ; ˙ϕ)
Iϕ¨+H(ϕ; ˙ϕ)−L(ϕ; ˙ϕ) = R(ϕ; ˙ϕ;x1;x2;...;xn; ˙x1; ˙x2;...; ˙xn) (2.14)
onde L(ϕ; ˙ϕ) ´e a fun¸c˜ao torque de direcionamento ou for¸ca eletromecˆanica do perturbador,
e est´a intimamente ligada a natureza da fonte de energia. Portanto, os sistemas dinˆamicos
modelados matematicamente como n˜ao ideais possuem pelo menos um grau de liberdade a
mais do que o sistema ideal correspondente, dependendo do n´umero de motores presentes nele.
O fenˆomeno de salto e o aumento de potˆencia exigido pela fonte de energia, operando na regi˜ao
da ressonˆancia, s˜ao manifesta¸c˜oes do fenˆomeno conhecido como efeito Sommerfeld [1], em
homenagem ao primeiro pesquisador a observar estes fatos experimentalmente. Sommerfeld
foi o precursor desta teoria, quando em um experimento observou que a velocidade do motor
n˜ao dependia apenas do tempo, mas tamb´em da amplitude de oscila¸c˜ao do sistema.
Um conceito importante em sistemas n˜ao ideais ´e a caracter´ıstica da fonte de energia.
Kononenko, a partir de 1958, publicou v´arios artigos investigando sistemas n˜ao ideais,
carac-ter´ısticas da fonte de energia e passagem pela ressonˆancia. A caracter´ıstica descreve a dinˆamica
interna da fonte de energia, relacionando suas grandezas, cujas escolhas dependem do tipo
2.9. Sistemas n˜ao-ideais 22
fonte de energia limitada. Em sistemas mecˆanicos ´e comum adotar como caracter´ıstica da
fonte de energia mecˆanica a rela¸c˜ao entre o torque L(ϕ; ˙ϕ) e a velocidade de rota¸c˜ao ˙ϕ= dϕdt,
a qual ´e mantida constante quando a rela¸c˜ao ´e encontrada. A caracter´ıstica muitas vezes ´e
utilizada como crit´erio de escolha da fonte de energia pois ela representa suas propriedades
essenciais. Uma t´ecnica adotada para a obten¸c˜ao da caracter´ıstica da fonte de energia ´e
ado-tar um parˆametro de controle, como por exemplo a potˆencia fornecida, e para cada valor fixo
deste, obter uma curva caracter´ıstica. Isso corresponde a uma fam´ılia de caracter´ısticas que
podem ser reguladas conforme a varia¸c˜ao do parˆametro de controle. Geralmente, tem-se duas
possibilidades destas curvas, no plano torque versus freq¨uˆencia de rota¸c˜ao. A primeira delas
sendo do tipo exponencial (mais realista)
L=a.ebdϕdt;
e a segunda sendo do tipo linear
L=a−bdϕ dt :
Na figura (2.11), as curvas correspondem a diferentes valores do parˆametro de controle, os
quais geram as caracter´ısticas L0;L1;...;L5.
Figura 2.11: Fam´ılia de caracter´ısticas da fonte de energia (L0, L1, ..., L5). Forma exponencial (esquerda)e forma linear (direita).
Quando as caracter´ısticas s˜ao adotadas na forma exponencial, geralmente precisam ser
obtidas na forma gr´afica, usando resultado de testes experimentais. A intersec¸c˜ao da curva
caracter´ıstica para determinado valor do parˆametro de controle, com a curva referente `a
energia total consumida pelo sistema, define o ponto de estabilidade do sistema, para o qual
a rota¸c˜ao ´e constante. Assim evidencia-se a dependˆencia do movimento da fonte de energia
com rela¸c˜ao a resposta do sistema vibrante, dado que a rota¸c˜ao da fonte de energia depende
da energia consumida pela estrutura para se movimentar. Deseja-se analisar a inclina¸c˜ao da
curva caracter´ıstica, ou seja, o estudo da caracter´ıstica da fonte de energia ´e realizado atrav´es
2.9. Sistemas n˜ao-ideais 23
Assim, quanto maior o valor de N, maior ´e a sua inclina¸c˜ao, podendo chegar a uma
posi¸c˜ao muito ´ıngreme (praticamente vertical), caracterizando o sistema ideal. Pode-se
classi-ficar a caracter´ıstica como suave quando N ´e pequeno, e r´ıgida (ou dura) quando N ´e grande.
Na maioria dos casos Ldecresce com o crescimento de ˙ϕ, ou seja,N ´e negativo. O torque de
resistˆencia ao movimento de rota¸c˜ao da fonte de energia H(ϕ; ˙ϕ) ´e obtido geralmente de
da-dos experimentais e apresentado na forma gr´afica. Uma revis˜ao completa de diferentes teorias
Cap´ıtulo 3
O sistema dinˆ
amico n˜
ao ideal
Nosso objetivo nesse cap´ıtulo ´e apresentar o sistema dinˆamico n˜ao ideal estudado. Alguns
m´etodos discutidos no cap´ıtulo anterior s˜ao aqui aplicados na medida do poss´ıvel, na an´alise
do sistema. O sistema dinˆamico considerado ´e constitu´ıdo por um bloco oscilante, ao qual ´e
adaptado um agente perturbador representado por um motor DC com energia limitada. Um
pˆendulo ´e acoplado ao bloco, como mostra a figura (3.1) abaixo.
Figura 3.1: O sistema estudado.
Temos ent˜ao um bloco de massa m1, cuja oscila¸c˜ao vertical ´e provocada pela rota¸c˜ao da massa m2 por um motor DC com fonte de energia limitada. O bloco est´a suspenso por uma mola de constante k1 e por um amortecedor de constante c1, e ao bloco est´a acoplado um pˆendulo de massa m3.
Os parˆametros f´ısicos do sistema est˜ao dados na tabela (3.1).
3.1. Equa¸c˜oes de movimento 25
m1 massa do bloco
m2 massa acoplada ao motor
m3 massa do pˆendulo
k1 coeficiente de elasticidade linear da mola
c1 coeficiente de amortecimento
L comprimento do pˆendulo
R distˆancia da massam2 ao eixo do motor
c3 coeficiente de amortecimento do pˆendulo
q1 vibra¸c˜ao vertical do bloco
q2 deslocamento angular do motor
q3 deslocamento angular do pˆendulo
M( ˙q2) torque l´ıquido do motor
J2 momento de in´ercia do rotor
g acelera¸c˜ao da gravidade.
Tabela 3.1: Descri¸c˜ao dos parˆametros
3.1
Equa¸c˜
oes de movimento
As equa¸c˜oes diferenciais de movimento do sistema dinˆamico governam o comportamento do
mesmo. Como o sistema estudado possui trˆes graus de liberdade, temos trˆes equa¸c˜oes
dife-renciais de segunda ordem. Para encontr´a-las, usaremos as equa¸c˜oes de Euler-Lagrange do
c´alculo variacional [5].
d dt(
∂L ∂q˙i
)− ∂L
∂qi
=Ni
onde ∂L
∂q˙i
= ∂T
∂q˙i
e ∂L
∂qi
= ∂T
∂qi −
∂V ∂qi
d dt(
∂T ∂q˙i
)− ∂T
∂qi
+∂V
∂qi
=Ni; i= 1,2,3. (3.1)
Energia Cin´etica
T = 1 2[m1q˙1
2+m
2(R2q˙22+ ˙q12+ 2Rq˙1q˙2cosq2) +m3(L2q˙32+ ˙q12+ 2Lq˙1q˙3senq3)] +J2q˙22 (3.2)
3.1. Equa¸c˜oes de movimento 26
U = 1 2k1q
2
1 (3.3)
Trabalho da for¸ca peso
Wc =−g{m1q1+m2(q1 +Rsenq2) +m3[q1+L(1−cosq3)]} (3.4)
Energia potencial total
V =U−Wc (3.5)
Calculando os termos para cada i, temos
• para i= 1:
d dt(
∂T ∂q˙1
) = (m1+m2+m3) ¨q1+m2R( ¨q2cosq2−q˙22senq2) +m3L( ¨q3senq3+ ˙q32cosq3)
∂T ∂q1
= 0
∂V ∂q1
=k1q1+ (m1+m2+m3)g
N1 =−c1q˙1
• para i= 2:
d dt(
∂T ∂q˙2
) = (m2R2 +J2) ¨q2+m2R( ¨q1cosq2−q˙1q˙2senq2)
∂T ∂q2
=−m2Rq˙1q˙2senq2
∂V ∂q2
=m2gRcosq2
N2 =M( ˙q2)
3.1. Equa¸c˜oes de movimento 27
d dt(
∂T ∂q˙3
) =m3L2q¨3+m3L( ¨q1senq3+ ˙q1q˙3cosq3)
∂T ∂q3
=m3Lq˙1q˙2cosq3
∂V ∂q3
=m3gLsenq3
N3 =−c3q˙3
Fazendo
m=m1 +m2+m3
α =m2R
β =m3L
α2 =m2R2+J2
α3 =m2gR
β2 =m3L2
β3 =m3gL
temos as equa¸c˜oes de movimento
mq¨1+c1q˙1+k1q1 =−mg−α( ¨q2cosq2−q˙22senq2)−β( ¨q3senq3+ ˙q32cosq3) (3.6)
α2q¨2 =M( ˙q2)−αq¨1cosq2−α3cosq2 (3.7)
β2q¨3+c3q˙3 =−βq¨1senq3−β3senq3 (3.8)
Isolando ¨q1, ¨q2 e ¨q3 respectivamente nas equa¸c˜oes, obtemos
¨
q1 =−g−
c1
mq˙1− k1
mq1− α
mq¨2cosq2+ α mq˙2
2senq 2−
β
mq¨3senq3− β mq˙3
2cosq
3 (3.9)
¨
q2 =
M( ˙q2)
α2 −
α α2
¨
q1cosq2−
α3
α2
3.1. Equa¸c˜oes de movimento 28
¨
q3 =−[
c3
β2 ˙
q3+
β β2
¨
q1senq3+
β3
β2
senq3] (3.11)
Substituindo ¨q2 e ¨q3 em (3.9), temos
¨
q1 = 1
D{ α α2
cosq2[α3cosq2−M( ˙q2)] +
β β2
senq3[β3senq3 (3.12)
+c3q˙3] +αq˙22senq2−βq˙32cosq3−mg−c1q˙1−k1q1}
onde
D=m− α
2
α2
cos2q2−
β2
β2 sen2q3
Substituindo agora (3.12) nas equa¸c˜oes (3.10) e (3.11) resultam
¨
q2 =
M( ˙q2)
α2 −
α2
α2 2D
cos2q2[α3cosq2−M( ˙q2)]−
αβ α2Dβ2
cosq2senq3[β3senq3+c3q˙3] (3.13)
−αα
2D
cosq2(αq˙22senq2−βq˙32cosq3−mg−c1q˙1−k1q1)−
α3
α2 cosq2
¨
q3 =−
c3
β2 ˙
q3−
αβ α2Dβ2
cosq2senq3[α3cosq2−M( ˙q2)]−
β2
β2 2D
sen2q
3[β3senq3+c3q˙3] (3.14)
−ββ
2D
senq3(αq˙22senq2−βq˙32cosq3−mg−c1q˙1−k1q1)−
β3
β2 senq3
Introduzindo as novas vari´aveis
x1 =
q1
L
x2 = ˙
q1
L x3 =q2
x4 = ˙q2
x5 =q3
x6 = ˙q3
transformamos as trˆes equa¸c˜oes (3.12), (3.13) e (3.14), que s˜ao equa¸c˜oes diferenciais de segunda
ordem, em um sistema de seis equa¸c˜oes diferenciais de primeira ordem
˙
3.2. Pontos de equil´ıbrio do sistema 29
˙
x2 = 1
DL{ α α2
cosx3[α3cosx3−M(x4)] +
β β2
senx5[β3senx5+c3x6]
+αx24senx3−βx26cosx5−mg−c1Lx2−k1Lx1}
˙
x3 =x4
˙
x4 =
M(x4)
α2 −
α2
α2 2D
cos2x3[α3cosx3−M(x4)]−
αβ α2Dβ2
cosx3senx5[β3senx5+c3x6]
− α
α2D
cosx3(αx24senx3−βx26cosx5−mg−c1Lx2−k1Lx1)−
α3
α2 cosx3
˙
x5 =x6
˙
x6 =−
c3
β2
x6 −
αβ α2Dβ2
cosx3senx5[α3cosx3−M(x4)]−
β2
β2 2D
sen2x5[β3senx5+c3x6]
− β
β2D
senx5(αx24senx3−βx26cosx5−mg−c1Lx2−k1Lx1)−
β3
β2 senx5
3.2
Pontos de equil´ıbrio do sistema
Conforme o item (2.5), escrevendo o sistema de equa¸c˜oes diferenciais na nota¸c˜ao matricial
˙
x=f(x), os pontos de equil´ıbrio x∗ s˜ao encontrados fazendo f(x) =0. Temos imediatamente que x∗
2 = x∗4 = x∗6 = 0, e substituindo esses valores nas demais equa¸c˜oes encontramos
1
DL{ α α2
cosx3(α3cosx3−M(0)) +
β β2
senx5(β3senx5)−mg−k1Lx1}= 0
M(0)
α2 −
α2
α2 2D
cos2x3(α3cosx3−M(0))−
αββ3
α2Dβ2
cosx3sen2x5−
α α2D
cosx3(−mg−k1Lx1)−
α3
α2
cos3 = 0
−ααβ
2Dβ2
cosx3senx5(α3cosx3−M(0))−
β2β 3
β2 2D
sen3x5−
β β2D
senx5(−mg−k1Lx1)−
β3
β2
senx5 = 0
Da ´ultima equa¸c˜ao obtemos
[− αβ
α2Dβ2
cosx3(α3cosx3−M(0))−
β2β 3
β2 2D
sen2x5+
β β2D
(mg+k1Lx1)−
β3
β2
]senx5 = 0
e portanto
senx5 = 0, x5 =Kπ; K ∈Z
−α2αβDβ2 cosx3(α3cosx3 −M(0))−
β2β 3
β2 2Dsen
2x
5+ β2βD(mg+k1Lx1)−
β3