UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE CIˆ
ENCIAS EXATAS E DA TERRA
PROGRAMA DE P ´
OS-GRADUAC
¸ ˜
AO EM MATEM´
ATICA
APLICADA E ESTAT´ISTICA
Francin´ario Oliveira de Araujo
M´etodo de Proje¸c˜
oes Ortogonais
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE CIˆ
ENCIAS EXATAS E DA TERRA
PROGRAMA DE P ´
OS-GRADUAC
¸ ˜
AO EM MATEM´
ATICA
APLICADA E ESTAT´ISTICA
M´etodo de Proje¸c˜
oes Ortogonais
Francin´ario Oliveira de Araujo
Orientador
: Prof. Dr. Nir Cohen
Coorientador
: Prof. Dr. Roberto Hugo Bielschowsky
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE CIˆ
ENCIAS EXATAS E DA TERRA
PROGRAMA DE P ´
OS-GRADUAC
¸ ˜
AO EM MATEM´
ATICA
APLICADA E ESTAT´ISTICA
M´
etodo de Proje¸
c˜
oes Ortogonais
Francin´ario Oliveira de Araujo
Disserta¸c˜ao de Mestrado apresentada ao Programa de P´ os-Gradua¸c˜ao em Matem´atica Aplicada e Estat´ıstica da Uni-versidade Federal do Rio Grande do Norte (PPGMAE-UFRN) como parte dos requisitos necess´arios para obten¸c˜ao do t´ıtulo de Mestre em Matem´atica Aplicada e Estat´ıstica. Orientador: Prof. Dr. Nir Cohen
Coorientador: Prof. Dr. Roberto Hugo Bielschowsky
Dedicat´
oria
“Este trabalho ´e dedicado a minha m˜
ae, Maria Nazar´e, meus irm˜
aos Francimario e
Franklinario e minha noiva Ja´ıra, por terem sempre me apoiado e me ensinado as coisas que
Agradecimentos
Primeiro agrade¸co a Deus por estar comigo durante toda minha vida, sempre colocando pessoas boas em meu caminho, ´otimos amigos e excelentes professores que contribu´ıram bastante na minha vida tanto pessoal quanto acadˆemica.
Aos professores Nir Cohen e Roberto Hugo B. pela orienta¸c˜ao e co-orienta¸c˜ao, e pela confian¸ca depositada em mim, acreditando na minha capacidade. Obrigado por ter feito conhecer os problemas inversos, por terem sido meus professores no mestrado, por me aconselhar e me ajudar a trilhar meu caminho profissional.
A minha m˜ae Maria Nazar´e pelo apoio, pela confian¸ca, por sua dedica¸c˜ao e por ter sido pai e m˜ae para mim e meu irm˜aos.
Aos meus irm˜aos Francimario e Franklinario e minha noiva Ja´ıra por ter sempre me apoiado. A toda minha fam´ılia em especial: As Minhas tias Meyre e Ana Selma e minha av´o Esmeraldina que sempre torceram por mim e me incentivaram a continuar.
A todos os professores do Programa PPGMAE que contribu´ıram bastante para minha forma¸c˜ao. Ao professor Pledson (UFRN) pelos conselhos na disciplina de semin´ario e pelo incentivo.
Aos meus grandes amigos da gradua¸c˜ao Moises, Aparecida e Camila que sempre me incentivaram a continuar e por tudo que eles me ensinaram.
Aos meus colegas de mestrado do PPGMAE, em especial Felipe e Kaline (“cabe¸c˜ao”), pois eles me ajudaram bastante em toda minha trajet´oria acadˆemica no programa PPGMAE, sempre prontos para me ajudar.
Aos meus colegas Elvis, Aldemir, Ivanildo e H´erica pelos momentos de descontra¸c˜ao.
Ao meu amigo Manass´es, que al´em de grande amigo ele tamb´em ´e colega de trabalho, pelas dicas na disserta¸c˜ao e na defesa.
Resumo
O problema abordado nesta disserta¸c˜ao ´e a prova da propriedade de limita¸c˜ao para os iterados de um algoritmo iterativo emℜd que aplica em cada passo uma proje¸c˜ao ortogonal sobre uma reta emℜd,
inde-xada em uma fam´ılia de retas dada (possivelmente infinita) e permitindo ordem arbitr´aria na aplica¸c˜ao das v´arias proje¸c˜oes. Este problema foi abordado em um artigo de B`ar`any et al. em 1994, que encontrou uma condi¸c˜ao necess´aria e suficiente para o caso d = 2 e analisou tamb´em o caso d > 2 sob algumas condi¸c˜oes t´ecnicas. Por´em, este artigo usa argumentos intuitivos n˜ao triviais e nas suas demonstra¸c˜oes nos parece faltar rigor. Nesta disserta¸c˜ao detalhamos e completamos as demonstra¸c˜oes do artigo de Bar´any, fortalecendo e clareando algumas de suas proposi¸c˜oes, bem como propiciando pontos de vista complementares em alguns aspectos do artigo em tela.
Abstract
The problem treated in this dissertation is to establish boundedness for the iterates of an iterative algo-rithm in ℜd which applies in each step an orthogonal projection on a straight line in ℜd, indexed in a
(possibly infinite) family of lines, allowing arbitrary order in applying the projections. This problem was analyzed in a paper by B`ar`any et al. in 1994, which found a necessary and sufficient condition in the cased= 2, and analyzed further the case d >2, under some technical conditions. However, this paper uses non-trivial intuitive arguments and its proofs lack sufficient rigor. In this dissertation we discuss and strengthen the results of this paper, in order to complete and simplify its proofs.
Sum´
ario
1 Introdu¸c˜ao 10
1.1 Descri¸c˜ao do Problema . . . 10
2 Uma breve introdu¸c˜ao ao m´etodo de proje¸c˜oes 12 2.1 O problema geral . . . 12
2.2 Uma vis˜ao geral de alguns m´etodos de proje¸c˜oes . . . 13
2.2.1 O m´etodo de Kaczmarz . . . 14
2.2.2 O m´etodo da relaxa¸c˜ao de Agmon, Motzkin e Schoenberg . . . 14
2.2.3 A generaliza¸c˜ao do m´etodo de proje¸c˜oes para conjuntos convexos . . . 15
2.2.4 Problemas n˜ao convexos . . . 16
2.2.5 Outra formula¸c˜ao para o problema de viabilidade convexa . . . 17
2.2.6 Uma abordagem para equa¸c˜oes n˜ao lineares . . . 18
2.3 Aplica¸c˜oes . . . 18
2.3.1 Reconstru¸c˜ao de imagens a partir de proje¸c˜oes . . . 19
2.3.2 Tomografia computadorizada . . . 19
2.3.3 O problema da fase . . . 20
2.4 Estrutura da Disserta¸c˜ao . . . 20
3 Fam´ılia de Retas no Plano 21 3.1 Propriedade da Proje¸c˜ao Limitada . . . 21
3.2 O Teorema Original . . . 23
3.3 O resultado principal . . . 25
3.4 Demonstra¸c˜ao do Teorema 3.1 . . . 27
4 Fam´ılia de Retas emRd 40 4.1 Situando o Problema de proje¸c˜ao Limitada comd >2 . . . 40
4.2 Consequˆencias da propriedade da proje¸c˜ao limitada em retas emℜd . . . . 41
9
5 Considera¸c˜oes Finais 54
5.1 Conclus˜ao . . . 54 5.2 Trabalhos Futuros . . . 55
A Resultados Da Geometria Euclidiana Plana 56
B Resultados de ´Algebra Linear 58
C Trajet´oria Ortogonal 61
D Conjuntos Convexos e Abertos 62
E Resultados de C´alculo 65
Cap´ıtulo 1
Introdu¸
c˜
ao
No artigo [4], B`ar`any et al. apresentam alguns resultados interessantes a respeito do m´etodo de proje¸c˜oes ortogonais sobre um n´umero infinito de retas emℜd, (d∈N). O artigo ´e matematicamente
denso e sua leitura ´e dif´ıcil. Suas demonstra¸c˜oes s˜ao intuitivas e as vezes falta o rigor necess´ario. Neste trabalho detalhamos estas demonstra¸c˜oes e acrescentamos novas observa¸c˜oes e nova intui¸c˜ao para o entendimento do problema.
1.1
Descri¸
c˜
ao do Problema
Sejam d∈N dado,Lum conjunto de retas em ℜd e um pontox
0∈ ℜd. Gera-se uma sequˆencia de pontosxn∈ ℜd, da seguinte maneira
xn+1=Pjnxn (1.1)
ondePjn´e a proje¸c˜ao ortogonal sobre uma das retas deL, arbitrariamente escolhida (ver o apˆendice B).
O problema ´e verificar que a sequˆencia (xn)∞n=1 gerada desta maneira ´e necessariamente limitada. Este problema foi solucionado por Aharoni et al. em [2], quandoL´e uma fam´ıliafinitade subespa¸cos afins em ℜd. Meshulam e Bargury deram outras demonstra¸c˜oes para o mesmo problema em [86], [6]
respectivamente. Bargury tamb´em considerou o caso de reflex˜oes emℜd e proje¸c˜oes com relaxa¸c˜ao (ver
[27]) emℜ2.
Em 1991, B`ar`any et al. [4] generalizaram o resultado de Aharoni et al. [2] para uma fam´ıliainfinita
de retas, obtendo a condi¸c˜ao necess´aria e suficiente para a limita¸c˜ao da sequˆencia (xn)∞n=1 em ℜ2; al´em disto, uma condi¸c˜ao apenas necess´aria, e outra apenas suficiente, para a mesma limita¸c˜ao emℜd, d >2.
Neste trabalho detalhamos e aprofundamos os teoremas de B`ar`any et al. [4].
O problema descrito acima surgiu dentre a teoria geral de m´etodos de proje¸c˜oes. DadosQ1, Q2, ..., Qn
1.1 Descri¸
c˜
ao do Problema
11
de um pontox0∈ ℜd qualquer, por
xn+1=Pjnxn (1.2)
ondePjn´e a proje¸c˜ao ortogonal sobre um dos conjuntosQipara (i= 1,2, ..., n). Como descrevemos, este
m´etodo geral e suas v´arias generaliza¸c˜oes tˆem v´arias aplica¸c˜oes. Normalmente, sup˜oe-se que os conjuntos
Qi s˜ao convexos, fechados e ∩Qi 6= ∅ (condi¸c˜ao de viabilidade) e procura-se provar a convergˆencia
(xn)→x∗, ondex∗ ∈ ∩Qi. Por´em, se∩Qi =∅, como em nosso problema, apenas pode-se esperar, no
melhor dos casos, provar que a sequˆencia (xn)∞n=1 ´e limitada.
Oproblema de viabilidadepara os conjuntosQipara (i= 1,2, ..., n) consiste no estudo de
algorit-mos para encontrar um ponto na interse¸c˜ao∩Qi. Os algoritmos de proje¸c˜ao s˜ao normalmente estudados
Cap´ıtulo 2
Uma breve introdu¸
c˜
ao ao m´
etodo de
proje¸
c˜
oes
2.1
O problema geral
Historicamente, as primeiras aplica¸c˜oes do m´etodo de proje¸c˜oes foram feitas sobre conjuntos Qi dos
seguintes tipos:
1. Hiperplano: conjunto de pontosx∈ ℜd tal que
ha, xi=b (2.1)
2. Semiespa¸co: conjunto de pontos x∈ ℜd tal que
ha, xi ≤b (2.2)
3. “Hiper fatia”: conjunto dosx∈ ℜd que pertencem `a interse¸c˜ao entre semiespa¸cos paralelos
b−ǫ≤ ha, xi ≤b+ǫ (2.3)
coma∈ ℜn eb∈ ℜ.
2.2 Uma vis˜
ao geral de alguns m´
etodos de proje¸
c˜
oes
13
Entre os primeiros trabalhos mencionamos Kaczmarz [71] que usou a ordem c´ıclica (ver [27]) de proje¸c˜oes
P1, P2, ..., Pn, P1, P2, ..., Pn, ...
emℜde Von Neumann [70] que considerou duas proje¸c˜oes sobre subespa¸cos fechados no espa¸co de Hilbert.
O m´etodo para hiperplanos era usado para resolver sistemas linearesAx=b, de modo similar aos m´etodos de Gauss-Seidel e Jacobi.
Quando queremos resolver um sistema linear Ax=b, se A ´e invert´ıvel, ent˜ao a solu¸c˜ao do sistema ser´a x=A−1b. Mas, existem v´arias situa¸c˜oes em que a matrizA“dificulta” a resolu¸c˜ao do sistema, ou seja,An˜ao ´e invert´ıvel ou de grande porte ou mal condicionada, e/ou n˜ao-sim´etrica.
Existem v´arias t´ecnicas para tentar resolver tais problemas, como por exemplo: m´ınimos quadrados
em´etodos iterativos, incluindo o m´etodo de proje¸c˜oes. Sugerimos a leitura do livro [53].
Em 1971, Tanabe [104] mostra que o m´etodo de proje¸c˜oes funciona bem para sistemas singulares ou n˜ao singulares. Ele tamb´em determina o espa¸co formado pelo conjunto solu¸c˜ao, caso exista.
Para aprofundamento neste assunto sugerimos a leitura dos artigos: [100], [9], [94], [23], [8], [28] e [29], [72] e [14].
Para outros tipos de abordagens veja [27], [10], [62], [74], [40], [41] e [101]. Para ver v´arias consi-dera¸c˜oes pr´aticas sobre implementa¸c˜ao, [57], [59], [61], [43], [44], [76] e [82].
O artigo de Censor [27] descreve alguns procedimentos para determinar a ordem da sequˆencia de proje¸c˜oes, ou seja, a escolha dejn na equa¸c˜ao (1.2). A ordem c´ıclica ´e a mais popular entre elas.
2.2
Uma vis˜
ao geral de alguns m´
etodos de proje¸
c˜
oes
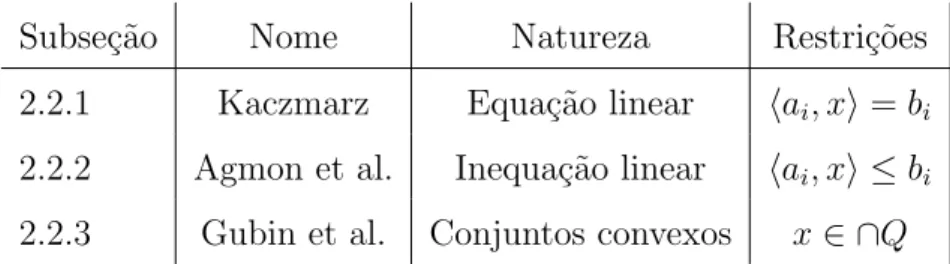
Nesta se¸c˜ao, vamos rever alguns m´etodos de proje¸c˜oes. As informa¸c˜oes sobre cada m´etodo aqui apresentado, est˜ao organizadas da seguinte maneira: (1) o problema o qual ele ´e utilizado para resolver, (2) formula¸c˜ao do algoritmo, (3) uma interpreta¸c˜ao geom´etrica e (4) coment´arios e referˆencias.
Subse¸c˜ao
Nome
Natureza
Restri¸c˜oes
2.2.1
Kaczmarz
Equa¸c˜ao linear
h
a
i, x
i
=
b
i2.2.2
Agmon et al.
Inequa¸c˜ao linear
h
a
i, x
i ≤
b
i2.2.3
Gubin et al.
Conjuntos convexos
x
∈ ∩
Q
Tabela 2.1: Os m´etodos de proje¸c˜oes da se¸c˜ao 2.2
2.2 Uma vis˜
ao geral de alguns m´
etodos de proje¸
c˜
oes
14
2.2.1
O m´
etodo de Kaczmarz
O problema. hai, xi=bi, i∈M (ou seja, (2.1)), assumindo que a solu¸c˜ao existe. O m´etodo. Iniciando emx(0)∈ ℜd qualquer. O passo geral ´e dado por
x(k+1)=x(k)+λ
k
bik−
aik, x
(k)
kaikk
2 aik
Tipo de controle. Quase c´ıclico.
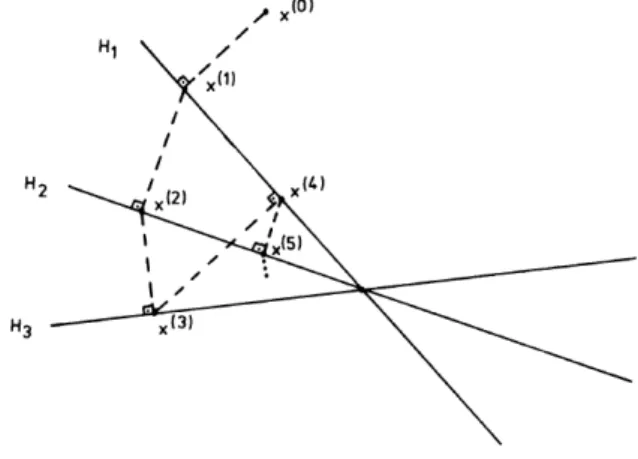
Interpreta¸c˜ao geom´etrica. Dadox(k)e o hiperplanoH
ik=
x∈ ℜd;ha
ik, xi=bik , determinado
pela equa¸c˜ao haik, xi=bik, encontramos x
(k+1)baixando uma perpendicular de x(k) na retaH
ik. Para
o relaxamento unit´ario, λk = 1 e para todo k ≥0,x(k+1) ´e a proje¸c˜ao ortogonal dex(k) paraHik, ver
figura (2.1).
Figura 2.1: O m´etodo de Kaczmarz.
Coment´arios e referˆencias. O m´etodo foi originalmente estudado por Kaczmarz [71] que provou a convergˆencia com o relaxamento unit´ario, para sistemas quadrados n˜ao singulares. Foi denotado por ART (algebraic reconstruction technique) por Gordon et al. [49], na reconstru¸c˜ao de imagem a partir de proje¸c˜oes, ver tamb´em Herman et al. [60]. Tanabe [104] estudou o m´etodo para matrizes em geral. A rela¸c˜ao com m´etodos SOR foi estudada por Elfving et al. [11]. McCormick [85] investigou o m´etodo em espa¸co de Hilbert e deu uma extens˜ao para equa¸c˜oes n˜ao-lineares. Veja tamb´em [12], [42], [105], [67], [3] e [83].
2.2.2
O m´
etodo da relaxa¸
c˜
ao de Agmon, Motzkin e Schoenberg
O problema:
Encontrar x∈ ℜd tal queha
i, xi ≤bi para todo i∈M (2.4)
2.2 Uma vis˜
ao geral de alguns m´
etodos de proje¸
c˜
oes
15
M´etodo:
Iniciando em x(0)∈ ℜd qualquer. O passo geral ´e dado por
x(k+1)=x(k)+c(k)a
ik
onde,
c(k)=min 0, λk
bik−
aik, x
(k)
kaikk
2
!
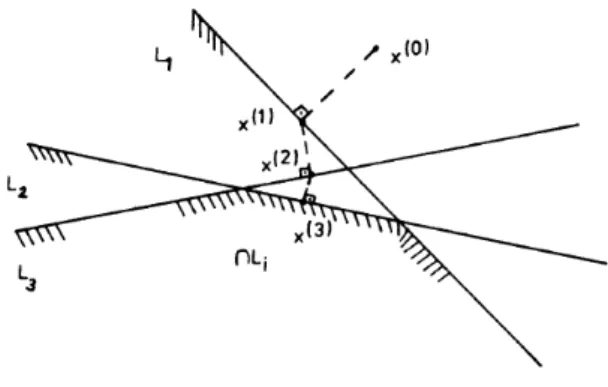
Controle: Quase c´ıclico.
Interpreta¸c˜ao geom´etrica: Dadox(k)e o semiespa¸co L
ik=
x∈ ℜd;ha
ik, xi ≤bik , determinado
pela inequa¸c˜aohaik, xi ≤bik, sex
(k)∈L
ik ent˜aox
(k+1)=x(k), sex(k)∈/ L
ik ent˜aox
(k+1)encontra-se na reta perpendicular aHik que passa emx
(k), ondeH
ik´e o semiespa¸co limitado porLik. Para a relaxa¸c˜ao
unit´aria,x(k+1) ´e a proje¸c˜ao ortogonal de x(k)sobreL
ik. Ver figura (2.2).
Figura 2.2: O m´etodo de Agmon, Motzkin and Schoenberg com relaxa¸c˜ao unit´aria.
Coment´ario e referˆencias
Agmon [1] e Motzkin et al. [87] publicaram o m´etodo em 1954. Na d´ecada de 70 esse m´etodo foi amplamente estudado por Goffin [45], [46], [47], [48] que tamb´em estabeleceu sua rela¸c˜ao com a otimiza¸c˜ao por subgradiente (ver, por exemplo, [92]). Um resumo da literatura pode ser encontrada em [37]. Generaliza¸c˜oes podem ser vistas em [88] para controles n˜ao-c´ıclicos.
2.2.3
A generaliza¸
c˜
ao do m´
etodo de proje¸
c˜
oes para conjuntos
convexos
2.2 Uma vis˜
ao geral de alguns m´
etodos de proje¸
c˜
oes
16
Problema: Dada uma fam´ılia (Qi)i∈M de conjuntos convexos e fechados deℜd com∩i∈MQi 6=∅,
encontrar um pontox∈ ∩i∈MQi. Este ´e o problema de viabilidade convexa. M´etodo: Iniciando dex(0)∈ ℜd qualquer. O passo geral ´e dado por:
x(k+1)=x(k)+λ
k
PQik(x
(k))
−x(k) ondePQ(x) representa a proje¸c˜ao ortogonal de xsobre o conjuntoQ.
Controle: Quase c´ıclico.
Interpreta¸c˜ao geom´etrica: Para o relaxamento unit´ario, λk = 1 e para todo k ≥ 0, x(k+1) ´e a
proje¸c˜ao ortogonal de x(k) sobre o conjuntoQ
ik, ver figura (2.3).
Figura 2.3: O m´etodo das proje¸c˜oes ortogonais sucessivas
Coment´arios e referˆencias: Ao escolherQicomo o hiperplano ou meio plano, os m´etodos da se¸c˜ao
(2.2.1) ou (2.2.2) s˜ao obtidos, respectivamente.
2.2.4
Problemas n˜
ao convexos
Quando os conjuntos Qk n˜ao s˜ao todos convexos, o m´etodo de proje¸c˜oes n˜ao tem convergˆencia
garantida, mesmo quando o problema ´e vi´avel, ou seja,∩Qi6=∅. A aplica¸c˜ao no problema da fase ´e do
tipo
fi(x) =pi, i∈M
ondefi:ℜn → ℜs˜ao fun¸c˜oes convexas, ou melhor
pi−ǫi≤fi(x)≤pi+ǫi
2.2 Uma vis˜
ao geral de alguns m´
etodos de proje¸
c˜
oes
17
2.2.5
Outra formula¸
c˜
ao para o problema de viabilidade convexa
O problema de viabilidade convexa pode tamb´em ser escrito como
encontrar x∈ ℜd tal que gi(x)≥0, para todo i∈M (2.5)
ondegi(x) s˜ao convexas. Uma forma de abordagem para (2.5) seria considerar conjuntos convexos
Qi=x∈ ℜd;gi(x)≤0 , i∈M (2.6)
e buscar um ponto comum, ou seja, umxque pertence a∩i∈MQi. Esse problema, por sua vez, poderia,
em princ´ıpio, ser abordado pelo m´etodo da se¸c˜ao (2.2.3).
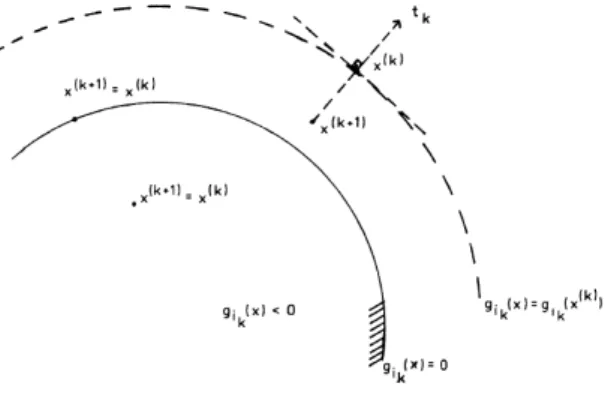
Censor et al. [20] descreveram uma variante que resolve (2.5), efetuando, a cada passo, um movimento em uma dire¸c˜ao determinada pelo gradiente (ou subgradiente, caso a fun¸c˜ao n˜ao seja diferenci´avel) da fun¸c˜aogik calculada na atual itera¸c˜aox
(k).
M´etodo: iniciando com x(0)∈ ℜd qualquer, onde o passo ´e dado por
x(k+1)=
x(k), se g
ik(x
(k))≤0
x(k)−λ
k gik(x(
k))
ktkk2 tk cc
ondetk ∈∂gik(x
(k)), ´e qualquer subgradiente deg
ik em x
(k), ver, por exemplo [93].
Controle: C´ıclico.
Interpreta¸c˜ao geom´etrica: Em uma itera¸c˜ao t´ıpica, a fun¸c˜aogik(x
(k))≤ 0 ´e tomada de acordo com um controle c´ıclico. Sex(k)satisfaz a desigualdade g
ik(x
(k))≤0 ent˜ao nenhum movimento ´e feito, caso contr´ario, um movimento ´e feito na dire¸c˜ao oposta ao (sub)gradiente degikemx
(k), ver figura (2.4).
Figura 2.4: Passo t´ıpico do m´etodo CSP para o caso convexo.
2.3 Aplica¸
c˜
oes
18
2.2.6
Uma abordagem para equa¸
c˜
oes n˜
ao lineares
Existe uma abordagem equivalente por fun¸c˜oes n˜ao lineares. Considerando um sistema de equa¸c˜oes
fi(x) =pi, i∈M (2.7)
onde fi : ℜd → ℜ e M = {1,2, ..., m}, e utilizando argumentos semelhantes, podemos substituir esse
sistema por um problema de viabilidade n˜ao-linear da seguinte forma
encontrar um x∈ ℜd tal que p
i−ǫi≤fi(x)≤pi+ǫi, i∈M (2.8)
ondeαi s˜ao tolerˆancias apropriadas.
Sefi(x) s˜ao fun¸c˜oes convexas para todos osi∈M, ent˜ao (2.8) representa um problema de viabilidade
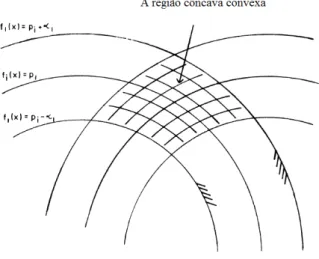
convexa-cˆoncava mista, ver figura (2.5). Tal abordagem foi dada em Censor et al. em [26], para o problema da tomografia por emiss˜ao computadorizada, onde um determinado modelo discretizado do problema leva a um sistema enorme e esparso como (2.8). Ver, por exemplo, Budinger et al. [16].
Uma extens˜ao do m´etodo c´ıclico de proje¸c˜oes por subgradiente para o caso n˜ao convexo foi formulada por Censor et al. [26].
Figura 2.5: O problema de viabilidade convexa-cˆoncava para resolver equa¸c˜oes
n˜ao-lineares.
2.3
Aplica¸
c˜
oes
2.3 Aplica¸
c˜
oes
19
2.3.1
Reconstru¸
c˜
ao de imagens a partir de proje¸
c˜
oes
Problemas na detec¸c˜ao de sinais e recupera¸c˜ao de imagens `as vezes podem ser reformulados como um problema de viabilidade convexa (convex feasibility problem), ou seja, consistem em encontrar um ponto na interse¸c˜ao de uma fam´ılia finita de conjuntos convexos e fechados. A reconstru¸c˜ao de imagens a partir de proje¸c˜oes ´e um procedimento de extrema utilidade em muitos campos cient´ıficos.
Os algoritmos de proje¸c˜ao, tanto os baseados em conjuntos convexos quanto os demais, tˆem sido muito utilizados na ´area de processamento de imagens. O m´etodo de proje¸c˜oes em conjuntos convexos, “POCS” (Projections Onto Convex Sets), ´e um poderoso algoritmo de restaura¸c˜ao de imagens que utiliza informa¸c˜oes a priori das mesmas, como conjuntos de restri¸c˜oes, a fim de solucionar o problema, ver [98]. O uso de “POCS” para solu¸c˜ao de sistemas lineares atrav´es de proje¸c˜oes ortogonais iterativas entre os hiperplanos descritos por cada equa¸c˜ao ´e tamb´em chamado de algoritmo de Row-Action Projection, RAP, ou Algebraic Reconstruction Technique, ART, que foi inicialmente desenvolvido por Kaczmarz [71].
Sugerimos a leitura de [32], [103], [91], [98], [97], [68], [73] e [89].
2.3.2
Tomografia computadorizada
A tomografia computadorizada (Computerized Tomography) tornou-se uma ferramenta indispens´avel em hospitais e cl´ınicas, e influenciou modelos afins nas ´areas de testes indestrut´ıveis e s´ısmica. Matema-ticamente, o modelo principal ´e a invers˜ao da transformada (linear) de Radon, ou adapta¸c˜oes da mesma para incluir o efeito da atenua¸c˜ao. Portanto, em princ´ıpio, o modelo da tomografia ´e linear (Ax =b). Por´em, o problema ´e de grande porte e mal condicionado, de modo que m´etodos adaptados para matrizes de grande porte (e esparsas) devem ser utilizados. Veja [104], [61].
No modelo tomogr´afico, as proje¸c˜oes 2−D de tomografia computadorizada de um objeto 3−D
(seja o modelo PET ou SPECT) s˜ao obtidas com medidas registradas externamente em v´arios ˆangulos de referˆencia. A partir destas proje¸c˜oes 2−D, os dados originais do objeto 3−D devem ser reconstru´ıdos utilizando-se t´ecnicas apropriadas. V´arias t´ecnicas e algoritmos est˜ao dispon´ıveis hoje em dia, permitindo a reconstru¸c˜ao da imagem a partir das proje¸c˜oes obtidas. O m´etodo de invers˜ao direta (retro-proje¸c˜ao ou back-projection) ´e usado apenas para problemas simples de resolu¸c˜ao baixa, embora hoje em dia esteja ficando mais vi´avel com o avan¸co da computa¸c˜ao. M´etodos que utilizam conceitos da estat´ıstica s˜ao bastante populares e reduzem o problema mal-condicionado a um problema de otimiza¸c˜ao com melhor condicionamento. Mencionamos aqui o m´etodo ML (maximal likelihood), EM/OS-EM/GEM/RAMLA (minimum expectation, ou m´axima verossimilhan¸ca, e suas generaliza¸c˜oes) e m´etodos Bayesianos. Veja [97], [58], [63] e [64].
2.4 Estrutura da Disserta¸
c˜
ao
20
Ver [49], [65], [59] e [107].
A t´ecnica ´e semelhante `a do m´etodo de Gauss-Seidel (GS). O custo computacional por itera¸c˜ao ´e aproximadamente igual ao dos m´etodos de gradiente. Para imagens avaliadas continuamente, GS ´e usado por ter uma convergˆencia melhor. Al´em disso, GS ´e bem adequado para segmenta¸c˜ao quando a imagem deve ser discretizada. Veja [97].
Para maior aprofundamento do assunto, sugerimos a leitura dos artigos: [99], [90], [34], [35], [107], [31], [102], [75], [96], [78], [95], [77] e [108].
2.3.3
O problema da fase
No problema da fase (phase retrieval) procura-se uma fun¸c˜ao real f(x), que representa a escala de cinza de uma imagem, a partir de|T(u)|, ondeT(u) ´e a transformada de Fourier def(x). Este problema ´e importante na astronomia, e foi tratado por Fienup usando v´arios esquemas de proje¸c˜ao. Veja [39] e [7].
Um problema similar ocorre em microscopia eletrˆonica. Neste caso, dado f(x) complexa, queremos recuperarf(x) a partir de|f(x)|e|T(u)|, ver [84].
2.4
Estrutura da Disserta¸
c˜
ao
A presente disserta¸c˜ao encontra-se dividida em cinco cap´ıtulos e um apˆendice. Nosso trabalho ser´a dividido em quatro partes: No Cap´ıtulo 2 expusemos uma revis˜ao de conceitos importantes do m´etodo de proje¸c˜oes.
No Cap´ıtulo 3, vamos mostrar que, uma fam´ılia de retas L no plano, sem pares de retas paralelas, tem a propriedade da proje¸c˜ao limitada se, e somente se, o conjunto formado pelos pontos de interse¸c˜ao entre duas retas quaisquer est´a contido em um disco limitado.
No Cap´ıtulo 4, vamos mostrar que se uma fam´ılia de retas L em ℜd (d>2) tem a propriedade de
proje¸c˜ao limitada, ent˜ao F(u) ´e limitada e satisfaz as seguintes condi¸c˜oes
|(F(u)−F(v))(u−v)| ≤c|u−v|2,∀u, v∈T
onde F(u) ´e a proje¸c˜ao ortogonal da origem na reta que tem dire¸c˜ao u ∈ T, onde T ´e um conjunto sim´etrico da esferaSd−1 ondeF(u) est´a definida; e
Z
Γ
F(u)·du= 0 (2.9)
para toda curva suave e fechada Γ⊂T. Reciprocamente, seT =Sd−1,F ∈C1 eF satisfaz (2.9), ent˜ao a fam´ıliaLpossui a propriedade da proje¸c˜ao limitada.
Cap´ıtulo 3
Fam´ılia de Retas no Plano
Neste cap´ıtulo, investigamos a propriedade de proje¸c˜ao limitada emℜd,(d≥2) na se¸c˜ao 3.1 e depois
enunciamos e provamos um resultado de B`ar`any et al. [4] sobre a caracteriza¸c˜ao desta propriedade em
ℜ2nas se¸c˜oes 3.2 e 3.3. Nossa demonstra¸c˜ao na se¸c˜ao 3.3 ´e mais detalhada e rigorosa que a demonstra¸c˜ao na vers˜ao original.
3.1
Propriedade da Proje¸
c˜
ao Limitada
Queremos caracterizar sistemas Θ de proje¸c˜oes sobre retas em ℜ2, cujos iterados ficam limitados a um disco de raio r fixo, independentemente da ordem na qual se escolhe as proje¸c˜oes. Nesta se¸c˜ao, iniciamos uma discuss˜ao que vale emRd, para todod≥2.
Defini¸c˜ao 3.1 (Sequˆencia Uniformemente Limitada) Seja Θuma fam´ılia de aplica¸c˜oesPi:ℜd→
ℜd. Dizemos queΘ´e uniformemente limitada em x
0∈ ℜd, se existet∈ ℜ+ tal que
kPkPk−1· · ·P1(x0)k ≤t
para todok∈N e todos Pk, Pk−1,· · · , P1∈Θ.
Defini¸c˜ao 3.2 (Conjunto Invariante) Seja Θ como definido em 3.1. Um conjunto W ⊂ ℜd ´e dito
invariante para Θ, se P w∈W para todo P∈Θe para todo w∈W.
Uma maneira de construir um conjunto invariante (o chamado “minimal”) em torno de um conjunto (n˜ao necessariamente invariante)W0seria considerar
3.1 Propriedade da Proje¸
c˜
ao Limitada
22
Proposi¸c˜ao 3.1 Dada uma fam´ılia Lde subespa¸cos afins1 em ℜd e um pontox
0∈ ℜd, denotemos por Θ =Pi:ℜd−→li , ondePi representa a proje¸c˜ao ortogonal dex0 sobre a reta li. (ver o apˆendice B).
As seguintes afirma¸c˜oes s˜ao equivalentes
(i) Cada sequˆencia de proje¸c˜oesPi1, Pi2,· · · , Pik,· · · aplicada em x0 ´e limitada.
(ii) A fam´ılia Θ´e uniformemente limitada emx0.
(iii) O conjunto invariante Θ(x0)´e limitado.
Demonstra¸c˜ao.
Nossa demonstra¸c˜ao segue o contorno geral da demonstra¸c˜ao original ( B´ar´any et al. [4] proposi¸c˜ao 1 ), por´em ´e mais clara. As implica¸c˜oes (ii)⇒(iii)⇒(i) s˜ao bem diretas e falta s´o mostrar (i)⇒(ii). Seja
C = sup{kPn...P1x0k} ≤ ∞ ondePi s˜ao proje¸c˜oes emL, n∈N.
Queremos mostrar que C <∞, supondo (i). Iniciamos escolhendo uma sequˆencia (yi)∞i=1 que atinge
C, ou seja,
yi=Rix0 kyik →C
quandoi7→ ∞eRi´e um produto de proje¸c˜oes emL. Defina tamb´em a sequˆencia associada (xi)∞i=1 por
xn =Rnxn−1 n= 1,2, ...
Usando a propriedade contrativa dosPi (kPi(x)k ≤ kxk), e portanto, dosRn, temos
kynk ≤ kyn−xnk+kxnk=kRnx0−Rnxn−1k+kxnk ≤ kx0−xn−1k+kxnk
≤ kx0k+kxn−1k+kxnk ≤3A
ondeA=supkxnk. Por hip´otese,A <∞j´a quex1, x2, ...., xn´e uma subsequˆencia de uma sequˆencia de
proje¸c˜oes da fam´ılia Θ, definida a partir dex0. PortantoC≤3A <∞.
Conforme B´ar´any et al. [4], vamos definir a propriedade da proje¸c˜ao limitada.
Defini¸c˜ao 3.3 (Propriedade da Proje¸c˜ao Limitada) Dizemos que uma fam´ılia L possui a propri-edade da proje¸c˜ao limitada, quando a fam´ılia L satisfaz uma das condi¸c˜oes equivalentes da proposi¸c˜ao 3.1.
Note que a propriedade da proje¸c˜ao limitada ´e independente da escolha do ponto x0, j´a que para toda sequˆencia finita de proje¸c˜oes emL
kPk· · ·P1(x0)−Pk· · ·P1(y0)k ≤ kx0−y0k.
1Dizemos que o conjuntoW =a+U ´e um subespa¸co afim deℜd, sea∈ ℜdeU ⊂ ℜdfor um subespa¸co
3.2 O Teorema Original
23
Na an´alise desta propriedade vale apenas a propriedade contrativa das proje¸c˜oes Pl. Assim, este
resultado generaliza `as proje¸c˜oes sobre conjuntos convexos (e n˜ao apenas `as proje¸c˜oes sobre conjuntos afins).
3.2
O Teorema Original
Dado uma reta qualquer l ∈ ℜd, denotemos por F(l) ∈ ℜd o ponto de menor norma na reta l, ou
seja,F(l) =Pl(O) (a proje¸c˜ao ortogonal da origem eml).
Lema 3.1 Se L´e uma fam´ılia de conjuntos afins emℜd com a propriedade da proje¸c˜ao limitada, ent˜ao
o conjuntoF(L) ={F(l), l∈L}´e limitado em ℜd. Demonstra¸c˜ao.
Argumentamos por contradi¸c˜ao. Seja u1, u2, ..., un, ... uma sequˆencia tal que kF(un)k → +∞, e
forma-se a sequˆencia de iterados
xn=Pn...P1x0
comx0 qualquer. O fato queF(un) =Pn(O) minimiza a norma emln, implica portanto
kxnk ≥ kF(un)k → ∞
o que ´e uma contradi¸c˜ao `a propriedade da proje¸c˜ao limitada.
A limita¸c˜ao deF(L) ´e suficiente, mas n˜ao necess´aria para garantir a propriedade da proje¸c˜ao limitada (ver figura 3.2). O corol´ario 3.1 mais adiante mostra a condi¸c˜ao necess´aria e suficiente.
Lema 3.2 Se l1, l2 s˜ao retas em ℜd com ponto de interse¸c˜ao ξ, ent˜ao os iterados xn do m´etodo de
proje¸c˜oes entrel1 el2 convergem para ξ.
Demonstra¸c˜ao.
Este ´e o caso particular dos teoremas obtidos por Von Neumann [70] e Kaczmars [71], e pode ser verificado facilmente poiskxk+1−ξk=cos(α)kxk−ξk, ondeα´e o ˆangulo entre l1 el2
Caso as retasl1, l2∈ ℜdn˜ao se interceptem, ent˜ao a sequˆencia de iteradosxndo m´etodo de proje¸c˜oes
converge para pontos que torna as retas mais pr´oximas.
Corol´ario 3.1 Seja L uma fam´ılia de retas em ℜ2, que n˜ao possui retas paralelas. Seja Ω o conjunto
3.2 O Teorema Original
24
Demonstra¸c˜ao.
Suponha por contradi¸c˜ao que existamξ1, ξ2, ξ3, ...∈Ω comkξik 7−→ ∞. Sejax0 qualquer, e defina
xn= (Pn,1Pn,2)k
n
xn−1
ondePn,1Pn,2 s˜ao as duas proje¸c˜oes nas duas retas ln,1, ln,2 ∈L que se interceptam emξn; escolhemos
kn>>1 tal quekxn−ξnk ≤1, argumentando pelo lema 3.2.
Assim,kxnk ≥ kξnk − kxn−ξnk ≥ kξnk −1→ ∞, implicando na perda da propriedade da proje¸c˜ao
limitada.
Figura 3.1:
Ilustrando a situa¸c˜ao onde a fam´ılia n˜ao possui a propriedade de proje¸c˜ao limitada.Agora vamos dar um contra-exemplo para a rec´ıproca do lema 3.1. Tomemos
L=nl(θ); 0≤θ≤π4o
onde para cada θ6= 0,l(θ) ´e a reta com inclina¸c˜aotg(θ) que passa na origem, el(0) ´e a reta horizontal que passa em (0,−4).
3.3 O resultado principal
25
O conjunto Ω seria ilimitado. Conforme o corol´ario 3.1, a limita¸c˜ao de Ω ´e uma condi¸c˜ao necess´aria para a propriedade da proje¸c˜ao limitada. De fato, B´ar´any et al. [4] (teorema 1) mostra que ´e tamb´em suficiente.
A demonstra¸c˜ao deste resultado em B´ar´any et al. [4] ´e intuitiva e informal. A seguir, fornecemos uma demonstra¸c˜ao formal e um novo ponto de vista sobre o problema: a propriedade Lipschitz da fun¸c˜ao
F(u), e a maneira mon´otona na qual as retasl(θ) interceptam grandes c´ırculos.
3.3
O resultado principal
Precisamos das seguintes defini¸c˜oes.
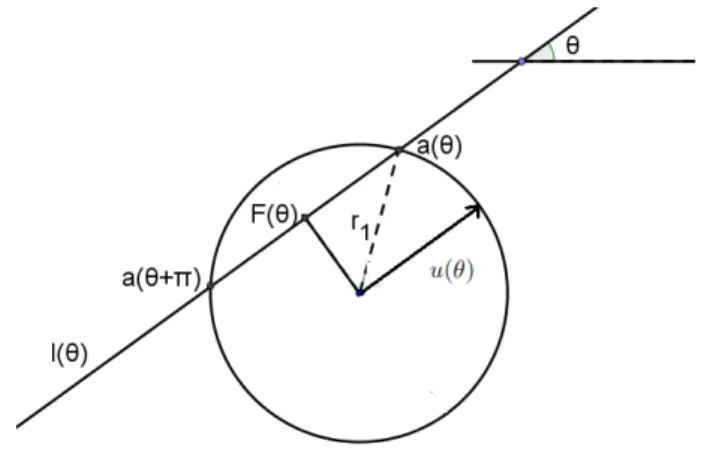
Dada uma fam´ıliaLde retas no plano, sem pares de retas paralelas, sejar1>0 tal quekF(l)k ≤r1, para todol∈L(a condi¸c˜ao necess´aria do lema 3.1). Para cada reta l∈L, denotemos por
1. θ=θ(l), o ˆanguloθ da retalcom o eixo x, onde (0≤θ < π). A fun¸c˜aoθ(l) ´e bem definida uma vez que n˜ao existem retas paralelas; al´em disso, os ˆangulosθeθ+πdescrevem a mesma reta. Ver figura 3.3.
Conforme definimosθ, vamos denotar por
u(θ) =
cos(θ)
sen(θ)
e v(θ) =u′(θ) =
−sen(θ)
cos(θ)
.
2. W ={θ(l);l∈L}, o conjunto de dire¸c˜oes emL. Sem perda de generalidade, mediante rota¸c˜ao no sentido hor´ario, podemos supor que 0∈W ⊂[0, π).
3. Wc=W∪ {W +π} ⊂[0,2π). Em especial, passamos a descreverF(l) porF(θ), com dom´ınio em
c
W, de forma queF(θ) =F(θ+π), ondeθ∈W.
4. Pelo lema 3.1, cadal(θ) intercepta a circunferˆenciaB(0, r) em exatamente dois pontos, que podem ser escritos como
a±(θ) =F(θ)±x(θ)u(θ), x(θ)≥0 (θ∈W).
Observando que formalmentea±(θ) =a∓(θ+π) (j´a que trata-se da mesma reta), seria equivalente
definir:
5. a(θ) =a+(θ) =F(θ) +x(θ)u(θ),(θ∈Wc), comF(θ), x(θ) satisfazendo para todoθ∈W
F(θ) = F(θ+π)
3.3 O resultado principal
26
Figura 3.3:
A figura est´a ilustrando as defini¸c˜oes feitas acima.Teorema 3.1 Seja L uma fam´ılia de retas no plano, que n˜ao possui pares de retas paralelas. Seja
W ={θ(l);l∈L} eWc=W ∪ {W+π} ⊂[0,2π). As seguintes afirma¸c˜oes s˜ao equivalentes:
(a) A fam´ıliaLpossui a propriedade de proje¸c˜ao limitada.
(b) O conjuntoΩdo corol´ario 3.1 ´e limitado.
(c) A fun¸c˜ao F :Wc→ ℜ2 ´e Lipschitz 2, ou seja,
|F(θ1)−F(θ2)| ≤k min{θ1−θ2, θ2−θ1+ 2π}
para0≤θ2≤θ1<2π.
(d) Se r >0 ´e tal queΩ⊂B(0, r), ent˜ao a:cW →S1 como definida no item (5), ´e mon´otona (lembre
que 0∈W).
O Teorema 1 de B`ar`any et al. afirma a equivalˆencia entre os itens (a) e (b) do teorema 3.1 e sua demonstra¸c˜ao segue a seguinte cadeia de implica¸c˜oes (a) ⇒ (b) ⇒ (c) ⇒ (d) ⇒ (a), onde o passo (d)⇒(a) ´e bastante complicado.
Para evitar a complica¸c˜ao (d) ⇒(a) apresentamos aqui uma demonstra¸c˜ao que segue as seguintes implica¸c˜oes (a)⇒(b)⇔(c)⇒(a). Al´em disso, o lema 3.4 mostra a implica¸c˜ao (b)⇒(d), j´a que uma 2Dado que F(θ) e a(θ) podem ser tratados como fun¸c˜oes peri´odicas de per´ıodo 2π, ´e mais natural pensar tudo em S1. Seja fW = {(cos(θ), sen(θ));θ∈W}, bem como Fe : fW ⊂ S1 → ℜ, definida por
e
3.4 Demonstra¸
c˜
ao do Teorema 3.1
27
fun¸c˜ao real cont´ınua f(x) sobre um conjunto conexo, ´e injetiva se, e somente se, f(x) ´e estritamente mon´otona. Assim a implica¸c˜ao (d)⇒(a) n˜ao ser´a abordada aqui.
A implica¸c˜ao (a)⇒(b) ´e garantida pelo lema 3.1.
3.4
Demonstra¸
c˜
ao do Teorema 3.1
Nesta se¸c˜ao, demonstraremos o teorema 3.1, em v´arios lemas, de modo a facilitar o entendimento do mesmo. Vamos iniciar mostrando a equivalˆencia entre os itens (b) e (c) do teorema 3.1.
Lema 3.3 O conjunto Ωno corol´ario 3.1 ´e limitado se, e somente se, a fun¸c˜aoF :Wc→ ℜ´e Lipschitz.
B`ar`any et al. [4], mostram apenas (b)⇒(c). De fato, essa implica¸c˜ao seria suficiente.
Demonstra¸c˜ao.
Para a demonstra¸c˜ao direta desse lema, vamos usar a ideia de B`ar`any et al. [4]. Nossa hip´otese ´e que Ω ´e limitado, digamos, Ω⊂B2=B(0, r2) e temos que mostrar queF(θ) ´e Lipschitz.
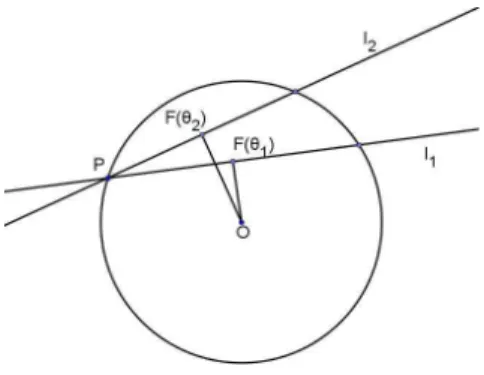
Sejam l1,l2 ∈L duas retas quaisquer, nas dire¸c˜oes θ1, θ2, respectivamente e denotemos por{P} =
l1∩l2. Por hip´otesekPk ≤r2. Observe a figura 3.4.
Figura 3.4:
Ilustrando a pior das situa¸c˜oes, ou seja, quando o ponto P est´a na fronteira deB2. Ora, o lema A.3 do apˆendice garante a existˆencia de uma circunferˆencia de diˆametro kOPk ≤ r2 que passa pelos pontos P, O, F(θ1), F(θ2). Com isso vamos obter a circunferˆencia de centroZ que est´a ilustrada na figura 3.5.Da figura 3.5 podemos tirar o triˆangulo is´osceles formado pelos pontosZ, F(θ1), F(θ2). onde a altura desse triˆangulo referente `a baseF(θ1)F(θ2) tamb´em ´e bissetriz do ˆanguloF(θ1)ZFb (θ2). Logo, pelo lema A.1 do apˆendice, o ˆanguloF(θ1)ZFb (θ2) ´e o dobro do ˆanguloF(θ2)P Fb (θ1); para melhor entendimento observe a figura 3.6.
Na figura 3.6, α= (θ2−θ1); com isso vamos obter a seguinte rela¸c˜ao
|sen(θ2−θ1)| =
kF(θ2)−F(θ1)k
2
kOPk
2
3.4 Demonstra¸
c˜
ao do Teorema 3.1
28
Figura 3.5:
Mostrando a circunferˆencia de diˆametro r22 que passa pelos pontosP, O, F(θ1), F(θ2).
Figura 3.6:
Ilustrando a situa¸c˜ao descrita acima.Juntando (3.1) com a desigualdade|sen(x)| ≤ |x|, obtemos
kF(θ2)−F(θ1)k ≤r2|sen(θ2−θ1)| ≤r2|θ2−θ1| Portanto podemos concluir que, F(θ) ´e Lipschitz com constantek=r2.
Agora vamos argumentar a rec´ıproca. Como a fam´ılia Ln˜ao possui retas paralelas, ent˜ao todo par de retas li, lj ∈L possui um ponto em comum. Denotemos por{P}=li∩lj, nosso objetivo ´e mostrar
que existeA >0, tal quekOPk ≤A.
Nossa hip´otese ´e que F(θ) ´e Lipschitz com constante k, e temos que mostrar que o conjunto Ω (do corol´ario 3.1) ´e limitado. Para isso tomemos duas retas quaisquer li, lj ∈ L nas dire¸c˜oes θi e θj
3.4 Demonstra¸
c˜
ao do Teorema 3.1
29
Figura 3.7:
Ilustrando a situa¸c˜ao descrita acima.Pelo lema A.3 do apˆendice, existe uma circunferˆencia que passa pelos pontos F(θi), F(θj), Pi,j e O
que tem por diˆametrokOPi,jk, ondePi,j´e o ponto de interse¸c˜ao entre as duas retas dadas. Como mostra
a figura 3.8.
Figura 3.8:
Mostrando a circunferˆencia que passa pelos pontosF(θi), F(θj), Pi,j e O.Como na equa¸c˜ao (3.1), temos
|sen(θj−θi)|= k
F(θj)−F(θi)k
kOPi,jk
.
Vamos considerar dois casos:
1. 0≤θj−θi≤
π
2.
kOPi,jk=k
F(θj)−F(θi)k
|sen(θj−θi)| ≤
k |θj−θi|
|sen(θj−sen(θi))|
=k
senx(x)
≤ kπ2 para 0< x=θj−θi, j´a que
x
sen(x) ´e crescente em [0,
π
2]. 2. π
2 ≤θj−θi< π.
kOPi,jk=k
F(θj)−F(θi)k
|sen(θj−θi)|
= kF(θj)−F(θi+π)k
|sen(θj−(θi+π))| ≤
k |θj−(θi+π)|
|sen(θj−(θi+π))|
=k
senx(x)
≤kπ2
para−π
2 ≤x=θj−(θi+π)<0, j´a que
x
sen(x) ´e decrescente em [−
π
3.4 Demonstra¸
c˜
ao do Teorema 3.1
30
Pelo lema E.1 do apˆendice conclu´ımos que, a interse¸c˜ao entre pares de retas deL vai estar contida em um discoD2, de raio menor ou igual a kπ
2 .
Como a fam´ıliaLpode estar definida em qualquer subconjuntoW de [0, π), ent˜ao para continuarmos nossas demonstra¸c˜oes, vamos estender a fam´ıliaLpara uma fam´ıliaLe completa, ou seja, a fam´ıliaLeest´a definida em todo intervalo [0,2π). Vamos fazer essa extens˜ao de modo que F : [0,2π] → ℜ ainda seja Lipschitz e com a mesma constante. Vale lembrar que esse artif´ıcio foi usado na demonstra¸c˜ao da parte principal do teorema 1 (vers˜ao original do artigo) por B`ar`any et al. [4]. Por´em eles n˜ao mostram como ´e feita tal extens˜ao.
Vamos construirLeda seguinte forma. Sejaθ0qualquer ˆangulo em (0, π) tal que n˜ao existel∈Lcom dire¸c˜aoθ0(lembre que 0, π∈Wc) eW ⊂[0, π). Defina agora
(a) θ−0 =sup{W∩[0, θ0)}. (b) θ+0 =inf{Wc∩(θ0, π]}.
temos ent˜ao que, 0≤θ−0 ≤θ0≤θ+0 ≤π. Dado queF(θ) ´e Lipschitz, observe que, seθn→θ−0 (θn→θ+0), ent˜aoF(θn) ´e uma sequˆencia de Cauchy. Portanto, podemos definir:
(c) Fe−= lim θ→θ−
0
F(θ). (d) Fe+= lim
θ→θ+0
F(θ).
Seθ0−=θ+0, pela propriedade LipschitzF−=F+ e portanto ´e suficiente aumentar a reta
l(θ) ={F++ru0, r∈ ℜ} u0=u(θ0).
Caso contr´ario, vamos completar o “cone” formado pelas retasl(θ0−), l(θ+0) por retas que passam pelo pontoξ=l(θ−0)∩l(θ+0), com ˆanguloθno intervalo [θ0−, θ+0]. Ver figura 3.9.
3.4 Demonstra¸
c˜
ao do Teorema 3.1
31
As equa¸c˜oes dessas retas s˜ao dadas por
l(θ) ={ξ+ru(θ);r∈ ℜ}
paraθ−0 ≤θ≤θ0+. Do mesmo jeito que fizemos em 1-5 na se¸c˜ao 3.3 paraL, podemos definirWf= [0, π),
c f
W = [0,2π), bem como as extens˜oesFe: [0,2π)→ ℜeea: [0,2π)→ ℜ. Podemos resumir o completamento para a fam´ıliaLe no lema 3.4, a seguir.
Lema 3.4 Se as retas de L indexadas por w∈W ⊂[0, π), se interceptam no interior de um disco D, de raio r2, ent˜ao seu completamento Le ´e uma fam´ılia de retas, indexadas em[0, π), tal que:
(i) Todo par de retas deLe se intercepta em D.
(ii) Fe(θ)´e Lipschitz com a mesma constante e Fe(θ+π) =Fe(θ).
(iii) ea: [0,2π)→∂D ´e cont´ınua e bijetora (1-1 sobre∂D).
(iv) Por todo ponto fora do disco D passa uma ´unica reta deL.
Demonstra¸c˜ao.
(i) Tomemos um “cone” qualquerC(θ0), formado pelas retasl(θ−0) el(θ+0). Escolha uma retal(θ)∈L, denotemos{P+}=l(θ)∩l(θ0+) e{P−}=l(θ)∩l(θ−0). Ver figura 3.10.
Figura 3.10:
Ilustrando a situa¸c˜ao acima.Isto ignora uma possibilidade como a da figura 3.11.
Isto ´e imposs´ıvel poisl(θ) seria paralela a uma reta no “cone”, e a fam´ıliaLe n˜ao pode possuir retas paralelas.
Sabendo que Ω⊂D, ent˜ao na pior das situa¸c˜oes, os pontosP+ eP−v˜ao pertencer a fronteira deD.
Com isso, a reta l(θ) vai cortar todas as retas do “cone”C(θ0) no segmento P+P−. Portanto, todo par
de retas da fam´ıliaLe se intercepta emD.
3.4 Demonstra¸
c˜
ao do Teorema 3.1
32
Figura 3.11:
Ilustrando a situa¸c˜ao acima.Quanto o item (iii), a continuidade de ea(θ), segue da continuidade de Fe(θ), uma vez que, para 0≤θ <2π
e
a(θ) =Fe(θ) +
r
r2 1−
eF(θ)
2
u(θ).
Figura 3.12:
Ilustrando a situa¸c˜ao acima.Al´em disso, ea(θ) ´e injetiva para 0≤θ <2π, pois n˜ao pode haver duas retas deLe se interceptando fora deD. Para ver queea([0,2π)) =∂D, dado que ea(θ) ´e injetiva, basta checar que lim
θ→2π−ea(θ) =ea(0). Isto decorre da defini¸c˜ao deea(θ), pois: lim
θ→π+ea(θ) = limθ→π−ea(θ) =ea(π) e limθ→0+ea(θ) =ea(0) asseguram que
lim
θ→2π−ea(θ) =ea(0) .
Para ver o item (iv), suponha r > r1 e defina a fun¸c˜ao ear(θ) = Fe(θ) +x(θ)u(θ), com x(θ) = r
r2−
eF(θ)2. Ou seja, da mesma forma como anteriormente, mas com respeito a um discoDrde raio
r > r1, de modo quekear(θ)k=r. Pelo mesmo argumento de antes,ear(θ) ´e cont´ınua, 1-1 e sobre∂Dr.
Consequentemente, isto nos garante uma ´unica reta de Le passando por cada ponto dos c´ırculos de raior > r1.
3.4 Demonstra¸
c˜
ao do Teorema 3.1
33
basta considerarmos o caso no qualLe ´e uma fam´ılia de retas completa, ou seja, indexada em 0≤θ < π, satisfazendo os itens (i−iv) do lema 3.4.
Assim com B`ar`any et al. [4], a ideia dessa demonstra¸c˜ao consiste em construir curvas ortogonais (ver o apˆendice (C)) a todas as retas da fam´ıliaLe come¸cando com pontos suficientemente distantes, de modo que:
1. Cada uma destas curvasG´e fechada, simples (ou seja, sem auto-interse¸c˜ao) e delimita a fronteira de uma regi˜ao convexa HG.
2. HG ´e um conjunto invariante para as proje¸c˜oes ortogonais sobre as retas deLe.
Pelo lema 3.4, todo ponto fora do disco D est´a em ´unica reta de Le, de modo que, se z ∈ ℜ2−D. Portanto, existe um ´unico par θ, x(θ) tal que
z(θ) =F(θ) +x(θ)u(θ) =ξ(θ)v(θ) +x(θ)u(θ) (3.2) ondev(θ) =u′(θ) eξ(θ) =hF(θ), v(θ)i.
SeF(θ) e x(θ) forem diferenci´aveis, ent˜ao a curvaz(θ)∈(ℜ2−D) seria ortogonal `as retas de Le se: 0 =Dz′(θ), u(θ)E=Dξ′(θ)v(θ) +ξ(θ)v′(θ) +x′(θ)u(θ) +x(θ)u′(θ), u(θ)E=x′(θ)−ξ(θ) dado quehu(θ), v(θ)i= 0. PeloTeorema Fundamental do C´alculoobter´ıamos:
x(θ) =x(0) +
Z θ
0
ξ(t)dt. (3.3)
O fato deF(θ) =ξ(θ)v(θ) n˜ao ser, necessariamente, diferenci´avel, complica um pouco os argumentos. Ainda assim, podemos considerar, para x(0) =x0 suficientemente grande, a curva z: [0,2π]→ ℜ2 dada por,
z(θ) =ξ(θ)v(θ) + x0+
Z θ
t=0
ξ(t)dt
!
u(θ). (3.4)
Lembrando queF(θ) ´e Lipschitz e est´a definida em [0,2π], ent˜ao existe Φ>0 tal que, kF(θ)k ≤Φ, para todo θ ∈ [0,2π]. Assim, podemos afirmar que
Z θ 0
ξ(t)dt
≤ 2πΦ. O lema 3.5 nos dir´a que
x0> r2+ Φ(2π+ 1) j´a ´e “suficientemente grande” para manter z(θ) fora deD e quez(θ) ´e uma curva Lipschitz e fechada, ver figura 3.13.
Lema 3.5 z(θ)´e Lipschitz para0≤θ≤2π ez(0) =z(2π). Sex0> r2+ Φ(2π+ 1), ent˜ao kz(θ)k> r2.
Demonstra¸c˜ao.
Sabemos que ξ(θ) =hF(θ), v(θ)i´e Lipschitz, pois F(θ) e v(θ) s˜ao Lipschitz e limitadas. Portanto,
z(θ) ´e Lipschitz. Al´em disso, temosF(θ) =F(θ+π) e v(θ+π) =−v(θ); consequentemente
3.4 Demonstra¸
c˜
ao do Teorema 3.1
34
Figura 3.13:
Ilustrando a situa¸c˜ao acima.para 0≤θ≤π. Em particular tem-se
Z 2π
0
ξ(t)dt=
Z π
0
ξ(t)dt+
Z π
0
ξ(t+π)dt= 0.
Segue que:
z(2π) =ξ(2π)v(2π) +
x0+
Z 2π
0
ξ(t)dt
u(2π) =ξ(0)v(0) +x0u(0) =z(0) ou seja, z(θ) ´e fechada.
Para concluir a demonstra¸c˜ao do lema 3.5 falta mostrar que min{kz(θ)k: 0≤θ <2π} > r2. Se
x > r2+ Φ(2π+ 1). De fato, usando a desigualdade triangular
kz(θ)k =
ξ(θ)v(θ) + x0+ Z θ
0
ξ(t)dt
!
u(θ)
≥ kx0u(θ)k −
ξ(θ)v(θ) + Z θ
0
ξ(t)dt
!
u(θ)
> k(r2+ Φ(2π+ 1))u(θ)k −
ξ(θ)v(θ) + Z θ
0
ξ(t)dt
!
u(θ)
≥ r2+ Φ(2π+ 1)− kξ(θ)v(θ)k+
Z θ 0
ξ(t)dt)dt
!
u(θ)
!
≥ r2+ Φ(2π+ 1)−(Φ + 2Φπ) =r2
Como desejado. Em resumo o lema 3.5 garante que a curva z(θ) ´e Lipschitz e fechada. Al´em disso, se tomarmosx0> r2+ Φ(2π+ 1), ent˜ao a trajet´oriaz(θ) n˜ao intercepta o discoD.
Queremos investigar o comportamento da curva z(θ) (0 ≤ θ ≤ 2π) em torno de um ponto z(θ0), usando um sistema local de coordenadas em torno deste ponto, definido pela base ortonormal {u0, v0} emℜ2comu
0=u(θ0) ev0=u ′
(θ0). Denotemos por ∆θ=θ−θ0, e de maneira geral, ∆f =f(θ)−f(θ0) para toda fun¸c˜aof(θ).
Temos
u(θ) = cos(∆θ)u0+sen(∆θ)v0
3.4 Demonstra¸
c˜
ao do Teorema 3.1
35
com as expans˜oes conhecidas de Taylor de ordem 2 (ver [30]).
sen(∆θ) ≈ ∆θ+O(∆θ3)
cos(∆θ) ≈ 1−∆θ
2
2 +O(∆θ 4)
assim obtemos
∆u= (u(θ)−u(θ0)) ≈
−∆θ
2
2 +O(∆θ 4)
u0+ ∆θ+O(∆θ3)v0 ∆v= (v(θ)−v(θ0)) ≈ −∆θ+O(∆θ3)u0+
−∆θ
2
2 +O(∆θ 4)v
0
Usando a parametriza¸c˜ao descrita na equa¸c˜ao (3.2) temos
∆z = ξ(θ)v(θ) +x(θ)u(θ)−ξ(θ0)v(θ0)−x(θ0)u(θ0) =ξ(θ)∆v+x(θ)∆u+ ∆ξv0+ ∆xu0 onde ∆z=z(θ)−z(θ0), ∆ξ=ξ(θ)−ξ(θ0) e ∆x=x(θ)−x(θ0).
Temos ent˜ao a representa¸c˜ao local
∆z = α(∆θ)u0+β(∆θ)v0 com
α(∆θ) = h∆z, u0i=ξ(θ)h∆v, u0i+x(θ)h∆u, u0i+ ∆x = ξ(θ)−∆θ+O(∆θ3)+x(θ)
−∆θ
2
2 +O(∆θ 4)
+ ∆x β(∆θ) = h∆z, v0i=ξ(θ)h∆v, v0i+x(θ)h∆u, v0i+ ∆ξ
= ξ(θ)
−∆θ
2
2 +O(∆θ 4)
+x(θ)∆θ+O(∆θ3)+ ∆ξ
Por outro lado, usando (3.4) e o teorema do valor intermedi´ario aplicado na fun¸c˜ao cont´ınua ξ(θ), temos
∆x=x(θ)−x(θ0) =
Z θ
0
ξ(t)dt−
Z θ0
0
ξ(t)dt=
Z θ
θ0
ξ(t)dt=ξ(θ∗)∆θ
paraθ∗∈[θ
0, θ], e tamb´em
−2πΦ≤
Z θ
0
ξ(t)dt=ξ(β∗)θ≤2πΦ
comβ∗∈[0, θ]. Consolidando os resultados obtidos acima, podemos afirmar o seguinte.
Lema 3.6 Paraxosuficientemente grande, existeǫ >0tal que, o seguinte vale para todoθcom|∆θ|< ǫ:
∆z = α(∆θ)u0+β(∆θ)v0
de modo que,
−3x20 ≤ α∆(∆θ2θ) ≤ −1 (3.5)
−2x0 ≤
β(∆θ)
3.4 Demonstra¸
c˜
ao do Teorema 3.1
36
Demonstra¸c˜ao.
Dado que ξ(θ) ´e Lipschitz, sejak1 tal que
ξ(θ)−ξ(θ′) ≤ k1
θ−θ′
Observe que a igualdadeα(∆θ) descrita acima nos diz que:
α(∆θ) = ξ(θ) −∆θ+O(∆θ3)+x(θ)
−∆θ
2
2 +O(∆θ
4)+ ∆x
≤ ξ(θ) −∆θ+O(∆θ3)+ (x
0−2πΦ)
−∆θ
2
2 +O(∆θ 4)
+ξ(θ∗)∆θ
= (ξ(θ∗)−ξ(θ)) ∆θ+−x20 +πΦ∆θ2+O(∆θ3)
≤ k1∆θ2+−x20 +πΦ∆θ2+O(∆θ3)
≤
−12x0+ [k1+πΦ]
∆θ2+O(∆θ3) por outro lado, de forma an´aloga podemos obter o seguinte:
α(∆θ) ≥
−12x0−[k1+πΦ]
∆θ2+O(∆θ3) logo,
−1
2x0−[k1+πΦ]
∆θ2+O(∆θ3)≤α(∆θ)≤
−1
2x0+ [k1+πΦ]
∆θ2+O(∆θ3) (3.7) Fazendo desenvolvimento an´alogo paraβ(∆θ), vamos obter:
β(∆θ) = ξ(θ)
−∆θ
2
2 +O(∆θ
4)+x(θ)∆θ+O(∆θ3)+ ∆ξ
≤ Φ2 |∆θ|+ (x0+ 2πΦ)∆θ+k1|∆θ|+O(∆θ2)≤
x0+ (2π+ 1
2)Φ +k1
|∆θ|+O(∆θ2) por outro lado, podemos escrever:
β(∆θ) ≥
x0−(2π+1
2)Φ−k1
|∆θ|+O(∆θ2) logo,
x0−(2π+ 1
2)Φ−k1
|∆θ|+O(∆θ2) ≤ β(∆θ)≤
x0+ (2π+ 1
2)Φ +k1
|∆θ|+O(∆θ2) (3.8) Fa¸ca x0>2
1 +k1+ (π+1 4)Φ
eǫtal que, para todo|∆θ|< ǫ, tenhao(∆θ2)<∆θ2. Observe que isso nos garante (3.5) e (3.6) a partir de (3.7) e (3.8).
O lema 3.6 nos garante que para |∆θ| < ǫ, onde ǫ > 0 ´e pequeno, a proje¸c˜ao ortogonal do vetor
3.4 Demonstra¸
c˜
ao do Teorema 3.1
37
Lema 3.7 Para x0∈ ℜ suficientemente grande, a reta l⊥θ0 ={z(θ0) +λv(θ0);λ∈ ℜ}, ortogonal a lθ0 e
contendo z(θ0), ´e tangente em z(θ0) a curva G, parametrizada porz(θ), no sentido que z(θ) =z(θ0) +
α(∆θ)u0+β(∆θ)v0 com
lim ∆θ→0
α(∆θ)
β(∆θ) = 0.
Demonstra¸c˜ao.
De (3.5) e (3.6), sek∆θk 6= 0 ´e suficientemente pequeno, ent˜ao
|∆θ|
x0 ≤
αβ(∆(∆θθ))
≤x0|∆θ| pelo teorema do confronto temos, lim
∆θ→0
α(∆θ)
β(∆θ) = 0.
A partir do lema 3.7, apesar dez(θ) n˜ao ser, necessariamente, uma parametriza¸c˜ao diferenci´avel da curva fechada que a define, ainda assim podemos pensar nas curvas obtidas como ortogonais aLe.
Lembrando que estamos denotando porHG a componente conexa e limitada definida por uma das
cur-vas ortogonais (ver o apˆendice (C)) aLe, estamos em condi¸c˜oes de concluir a demonstra¸c˜ao da propriedade da proje¸c˜ao limitada deLe.
Lema 3.8 Para x0 suficientemente grande, HG ´e convexa. Al´em disto, ´e invariante sob proje¸c˜oes
orto-gonais por Le.
Para a demonstra¸c˜ao que o conjunto HG ´e convexo, nossa ideia ´e mostrar primeiro que existe um
hiperplano suporte local para cada ponto da curvaG(ver a defini¸c˜ao D.5 no apˆendice). Feito isso, vamos usar o teorema do hiperplano suporte local D.3 do apˆendice para mostrar que o conjuntoHG ´e convexo.
J´a a demonstra¸c˜ao da segunda parte desse lema ´e mais direta.
Demonstra¸c˜ao.
SejaGuma curva parametrizada porz(θ), constru´ıda a partir dex0suficientemente grande e fixo, de modo a valerem os lemas 3.6 e 3.7. Considere agora, para cada 0≤θ≤2π, os semiplanos definidos por
3.4 Demonstra¸
c˜
ao do Teorema 3.1
38
Figura 3.14:
Ilustrando a situa¸c˜ao acima.Agora vamos definir o seguinte conjunto.
HG = \
0≤θ≤2π
Hθ− (3.9)
O lema 3.7 nos garante que:
hz−z(θ), u(θ)i ≤0 (3.10) parak∆θk=kθ0−θk< δ, comδ >0 suficientemente pequeno ex0 suficientemente grande. Isso mostra que para todo 0≤θ≤2πo semiplanoHθ−´e localmente um hiperplano suporte local da curvaG. O lema 3.5 garante que a curvaG´e fechada, al´em disso o interior deHG ´e n˜ao vazio. Portanto, o teorema D.3,
do hiperplano suporte local no apˆendice, garante que o conjuntoHG ´e convexo.
Agora, vamos mostrar que se tomarmos p ∈ HG, ent˜ao a proje¸c˜ao ortogonal de p em uma reta
qualquer l(θ)∈ Le ainda pertence ao conjuntoHG. Denotemos por Pθ(p) a proje¸c˜ao ortogonal dep na
retalθ∈Le.
Para ver que, dado p ∈ HG, tem-se tamb´em quePθ(p) ∈ HG, veja que a reta ortogonal a lθ que
cont´em o ponto p∈Hθ−∩Hθ−+π permanecer´a emHθ−∩Hθ−+π. Vale dizer, quePθ(p) cair´a no segmento
3.4 Demonstra¸
c˜
ao do Teorema 3.1
39
Figura 3.15:
Ilustrando a situa¸c˜ao acima.Agora podemos mostrar a parte principal deste cap´ıtulo que ´e a implica¸c˜ao (c)⇒(a) do teorema 3.1.
Lema 3.9 Se F :Wc→ ℜ2 ´e Lipschitz, ent˜ao a fam´ıliaLe possui a propriedade da proje¸c˜ao limitada.
Demonstra¸c˜ao.
Para x fixo e bastante grande, o lema 3.8 garante que o conjunto HG ´e invariante para todas as
proje¸c˜oes em Le. Al´em disso, o lema 3.5 mostra que a curva z(θ) ´e limitada, e assim o interior Gx ´e
tamb´em limitado. Portanto, toda sequˆencia de proje¸c˜oes come¸cando em um pontozqualquer emGxfica
Cap´ıtulo 4
Fam´ılia de Retas em
R
d
Neste cap´ıtulo, vamos fazer uma extens˜ao do corol´ario 3.1 para uma fam´ılia de retas em ℜd com
(d >2). A situa¸c˜ao aqui ´e mais complicada. Primeiro, n˜ao ´e razo´avel estipular a interse¸c˜ao de cada par de retas. Segundo, a monotonia dea(θ) mensionada no lema 3.4 n˜ao faz mais sentido.
4.1
Situando o Problema de proje¸
c˜
ao Limitada com
d >
2
Come¸camos esta se¸c˜ao com um exemplo, de uma fam´ılia de retasLemℜ3, ondeLpossui a propriedade da proje¸c˜ao limitada, por´emF(θ) n˜ao ´e Lipschitz.
Exemplo 4.1 Seja L uma fam´ılia de retas em ℜ3, onde todas as retas de L est˜ao no plano z = 0 e
passam pela origem. Pelo lema 3.1 Lpossui a propriedade da proje¸c˜ao limitada. Agora vamos construir uma fam´ılia Le a partir de L da seguinte forma: retiramos uma reta qualquer l ∈L e a colocamos em outro plano paralelo, digamosz=a.
Afirmamos que a fam´ılia Le tamb´em possui a propriedade da proje¸c˜ao limitada. Ao projetarmos na reta l destacada, ´e o mesmo que projetarmos na original e faz´emos z = a. Vice-versa, se P ∈ l, sua proje¸c˜ao em qualquer outra reta ´e a mesma obtida a partir da reta que lhe ´e paralela e foi destacada de
L. Portanto, a cada sequˆencia no novo sistema Le corresponde uma sequˆencia de proje¸c˜oes emL, cujos iterados ou bem coincidem, ou ent˜ao diferem de (0,0, a). Isto significa que Le herda a propriedade da proje¸c˜ao limitada deL.
4.2 Consequˆ
encias da propriedade da proje¸
c˜
ao limitada em retas em
ℜ
d41
F(θ) =
0 se l ∈ L
(0,0, a) se l ∈/ L
Isso significa queF(θ) ´e descont´ınua, logo n˜ao ´e Lipschitz.
B`ar`any et al. em [4] acrescentam a condi¸c˜ao de suavidade aF(θ), que n˜ao foi necess´aria para o caso
d = 2. At´e acreditamos que ela n˜ao seja necess´aria, no caso analisado por B`ar`any et al. em [4], mas deixaremos isso para um trabalho futuro.
4.2
Consequˆ
encias da propriedade da proje¸
c˜
ao
limi-tada em retas em
ℜ
d
Seja L uma fam´ılia de retas em ℜd (d > 2). Assim como no caso do plano, cada reta l ∈ L vai
ser dada pela sua dire¸c˜ao, que pode seru∈Sd−1 (ou−u∈Sd−1) e pelo vetor F(u)∈l mais pr´oximo `a origem, ou seja, F(u) ´e a proje¸c˜ao ortogonal da origem O em l. Al´em disso, vamos supor que F(u) est´a definida em um subconjunto sim´etrico T ⊂ Sd−1 que assumimos ser fechado. (isso ´e um pouco mais do que assumir que L n˜ao cont´em retas paralelas). Podemos afirmar que, F(u) tem as seguintes propriedades;
F(u) = F(−u) ∀u∈T (4.1)
hu, F(u)i = 0 ∀u∈T (4.2)
As igualdades (4.1) e (4.2) s˜ao garantidas pelo modo que F(u) foi definido. SeL tem a propriedade da proje¸c˜ao limitada, ent˜ao, pelo lema 3.1,F(u) ´e limitada. Al´em disso, vamos enunciar mais algumas condi¸c˜oes sobre a fun¸c˜aoF(u), a serem consideradas em alguns momentos deste cap´ıtulo.
|hF(u)−F(v), u−vi| ≤ cku−vk2,∀u, v∈T (4.3)
kF(u)−F(v)k ≤ cku−vk,∀u, v∈T (4.4)
Z
Γ
F(u)·du = 0, para todas as curvas suaves f echadasΓ⊂T (4.5)
Observa¸c˜ao 1 Devemos observar que (4.4) implica em (4.3). A equa¸c˜ao (4.4) diz que a fun¸c˜aoF(u)´e Lipschitz. A equa¸c˜ao (4.3) diz que a fun¸c˜ao F(u)´e Lipschitz direcional. A equa¸c˜ao (4.5) sugere pensar emF(u) como um campo conservativo emT ⊂Sd−1.
Nesta se¸c˜ao, vamos mostrar que para toda fam´ılia de retas L em ℜd que possui a propriedade da
4.2 Consequˆ
encias da propriedade da proje¸
c˜
ao limitada em retas em
ℜ
d42
Teorema 4.1 Se uma fam´ılia de retasLtem a propriedade da proje¸c˜ao limitada, ent˜ao F(u)satisfaz a condi¸c˜ao (4.3). Al´em disso, seF(u)satisfaz a condi¸c˜ao (4.3), ent˜ao as sequˆencias de proje¸c˜oes alternadas entre quaisquer pares de retas deL s˜ao uniformemente limitadas.
Demonstra¸c˜ao.
Vamos iniciar mostrando que, se uma fam´ılia de retasLtem a propriedade da proje¸c˜ao limitada, ent˜ao
F(u) satisfaz a condi¸c˜ao (4.3). Nessa demonstra¸c˜ao, nossa contribui¸c˜ao ser´a detalhar a argumenta¸c˜ao feita por B`ar`any et al. em [4]. Dado duas retas lu, lv ∈ L, com dire¸c˜oes u, v ∈ Sd−1 respectivamente
escolhidas de modo que hu, vi ≥ 0 (uma vez que u ∈ Sd−1 e −u ∈ Sd−1 definem a mesma reta). A sequˆencia de proje¸c˜oes ortogonais alternadas entre lu elv vai aproximar a distˆancia entre as duas retas.
Sejam p ∈ lu e q ∈ lv, pontos que realizam a distˆancia entre as retas lu e lv, como no lema B.2 no
apˆendice.
kp−qk=dist(lu, lv)
observe a figura 4.1.
Figura 4.1:
Ilustrando a sequˆencia de proje¸c˜oes entre as duas retas emℜd.Pelo lema B.2 no apˆendice vamos obter:
p = F(u)− hF(u), vi
1 +hu, viu+
hF(v), ui+hF(u), vi
1− hu, vi2 u (4.6)
Os dois primeiros termos da equa¸c˜ao (4.6) s˜ao limitados, pelo fato queF(u) ´e limitado. Enquanto o ´
ultimo termo ´e limitado se, e somente se, existec∈ ℜ, c >0 tal que
|hF(v), ui+hF(u), vi|
1− hu, vi2 ≤
c
de modo equivalente
4.2 Consequˆ
encias da propriedade da proje¸
c˜
ao limitada em retas em
ℜ
d43
portanto
|hF(v), ui+hF(u), vi| ≤ c1|1− hu, vi| (4.7) Como, kuk=kvk= 1, temos que
1
2ku−vk 2
=1
2hu−v, u−vi= 1 2(kuk
2
−2hu, vi+kvk2) =1
2(2−2hu, vi) = 1− hu, vi ou seja,
1
2ku−vk 2
= 1− hu, vi (4.8)
al´em disto, dehF(u), ui=hF(v), vi= 0
hF(u), vi+hF(v), ui = − hF(u)−F(v), u−vi (4.9) substituindo (4.8), (4.9) em (4.7), podemos concluir que
|hF(u)−F(v), u−vi| ≤c21ku−vk2
ou seja,F(u) satisfaz a condi¸c˜ao (4.3) como quer´ıamos demonstrar.
Agora vamos mostrar a rec´ıproca. Para isso, devemos observar que a conta acima pode ser revertida, no sentido que, dadas duas dire¸c˜oes quaisqueru, v∈Sd−1, comhu, vi ≥0, se a condi¸c˜ao (4.3) vale, ent˜ao
kp(u, v)k=
F(u)−
hF(u), vi
1 +hu, viu+
hF(v), ui+hF(u), vi
1− hu, vi2 u
permanece uniformemente limitado. Veja que, por (4.3), (4.7) ekuk=kvk= 1, tem-se que
hF(v), ui+hF(u), vi
1− hu, vi2
≤ c1 2
|1− hu, vi|
1− hu, vi2 ≤
c1 2
1
|1 +hu, vi| ≤c (4.10)
As equa¸c˜oes (4.6) e (4.10) nos garantem que a distˆancia entre os pontos mais pr´oximos de duas retas
lu elvquaisquer tˆem uma cota uniforme, dado que basta supor quehu, vi ≥0 em (4.6). Como sequˆencias
de proje¸c˜oes alternadas entre as retasluelv tˆempu eqv como pontos de acumula¸c˜ao, isto nos garante a
rec´ıproca.
Agora vamos mostrar que se L tem a propriedade da proje¸c˜ao limitada e F(u) ∈C1 em T, ent˜ao
F(u) satisfaz (4.5).
Teorema 4.2 Suponha que Ltem a propriedade da proje¸c˜ao limitada. Se F(u)∈C1 emT, ent˜aoF(u)
satisfaz a condi¸c˜ao (4.5).
4.2 Consequˆ
encias da propriedade da proje¸
c˜
ao limitada em retas em
ℜ
d44
Nossa contribui¸c˜ao na demonstra¸c˜ao do teorema 4.2, ser´a detalhar a argumenta¸c˜ao feita por B´ar´any et al. em [4], principalmente na parte final da demonstra¸c˜ao feita por eles. Para estabelecer a condi¸c˜ao (4.5), vamos tomar u(t),0 ≤ t ≤ 1, uma parametriza¸c˜ao suave da curva Γ de modo que u(0) = u(1). Consideremos tamb´em uma curva ortogonal a fam´ılia L (ver no apˆendice (C)) que passa em z0 ∈ ℜd, dada por;
z(t) =F(u(t)) +x(t)u(t) (4.11) Iniciando dez(0) =z0 comx(0) =x0grande o suficiente. Pela defini¸c˜ao (C.2 no apˆendice),z(t) ser´a a trajet´oria ortogonal ao longo da fam´ılia de retaslu(t)∈Lse a dire¸c˜ao dez(t) for ortogonal alu(t)para todot∈[0,1], ou seja,
hz˙(t), u(t)i= 0 para todot∈[0,1]. Portanto
0 =hz˙(t), u(t)i=
∂F
∂u(u(t))·u˙(t) + ˙x(t)u(t) +x(t) ˙u(t), u(t)
=
∂F
∂u(u(t))·u˙(t), u(t)
+hx˙(t)u(t) +x(t) ˙u(t), u(t)i
Em resumo, dado queku(t)k= 1 ehu˙(t), u(t)i= 0, chegamos a
∂F
∂u(u(t))·u˙(t), u(t)
+ ˙x(t) = 0 (4.12)
Vamos fazer uma rela¸c˜ao entre a equa¸c˜ao (4.12) e a derivada da equa¸c˜ao (4.2). DerivandohF(u(t)), u(t)i= 0, obtemos
0 =
∂F
∂u(u(t))·u˙(t), u(t)
+hF(u(t)),u˙(t)i
logo,
∂F
∂u(u(t))·u˙(t), u(t)
= − hF(u(t)),u˙(t)i (4.13) De (4.12) e (4.13), obtemos
˙
x(t) = hF(u(t)),u˙(t)i (4.14) Sabemos que F(u) e ˙u(t) s˜ao cont´ınuas e limitadas. Portanto, podemos aplicar oteorema funda-mental do c´alculona equa¸c˜ao (4.14), com isso vamos obter
x(t) =x(0) +
Z t
y=0h
F(u(y)),u˙(y)i ·dy=x(0) +
Z
Γt
F(u)·du
onde Γt= Γ|[0,t]. Em particular, temos
x(1) =x(0) +
Z
Γ