Centro de Tecnologia
Programa de Pós-graduação em Engenharia Elétrica
Controle Automático para Injeção Otimizada de Gás
em Poços de Petróleo Equipados para
Funcionamento com Gás
Lift
Contínuo
Autor:
Rafael Barbosa Spíndola
Natal / RN – Brasil
Julho de 2003
Controle Automático para Injeção Otimizada de Gás
em Poços de Petróleo Equipados para
Funcionamento com Gás
Lift
Contínuo
Orientador:
Prof. D. Sc. André Laurindo Maitelli
Co-orientador:
Eng. M. Sc. Edson Henrique Bolonhini
Dissertação submetida ao Programa de Pós-graduação
em Engenharia Elétrica da Universidade Federal do Rio
Grande do Norte, como parte dos requisitos necessários
para obtenção do título de Mestre em Ciência de
Engenharia Elétrica.
Natal / RN – Brasil
Julho de 2003
Poços de Petróleo Equipados para Funcionamento com
Gás
Lift
Contínuo
Dissertação submetida ao Programa de Pós-Graduação em Engenharia Elétrica da
Universidade Federal do Rio Grande do Norte, como parte dos requisitos
necessários para obtenção do grau de Mestre em Ciências no Domínio da
Engenharia Elétrica.
Aprovado por:
Prof. D. Sc. André Laurindo Maitelli (Orientador) - DCA / UFRN
Eng. M. Sc. Edson Henrique Bolonhini (Co-orientador) - PETROBRAS
Prof. D. Sc. Pablo Javier Alsina - DCA / UFRN
Eng. D. Sc. Antônio Rodrigues Patrício - WEATHERFORD
Divisão de Serviços Técnicos
Catalogação da Publicação na Fonte. UFRN / Biblioteca Central Zila Mamede
,Spíndola, Rafael Barbosa
.
Controle automático para injeção otimizada de gás em poços de
petróleo equipados para funcionamento com gás lift contínuo / Rafael
Barbosa Spíndola. - Natal (RN), 2004.
92 p. : il.
Orientador: André Laurindo Maitelli.
Co-orientador: Edson Henrique Bolonhini.
Dissertação (Mestrado) – Universidade Federal do Rio Grande do
Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia
Elétrica.
1. Petróleo – Tese. 2. Gás lift contínuo – Método de elevação artificial
– Tese. 3. Controlador inteligente – Injeção de gás lift – Tese. 4.Sistema
inteligente de controle automático – Injeção de gás lift – Controle de
pressão de fluxo – Tese. I. Maitelli, André Laurindo. II. Bolonhini,.
Edson Henrique. III. Título.
Índice de Assuntos
LISTA DE FIGURAS... iii
LISTA DE TABELAS... v
RELAÇÃO DE SÍBOLOS E ABREVIATURAS... vi
SUMÁRIO... viii
ABSTRACT... ix
DEDICATÓRIA... x
AGRADECIMENTOS... xi
1.
INTRODUÇÃO... 1
2.
MÉTODO DE ELEVAÇÃO POR GÁS
LIFT
CONTÍNIO
... 5
2.1. Introdução... 6
2.2. Gás
lift
... 6
2.3. Vantagens e limitações do gás
lift
contínio... 8
2.4. Válvulas de gás
lift
... 9
2.5. Aspectos econômicos ... 11
2.6. Mecanismos de produção ... 11
2.7. Desempenho de um poço de petróleo... 15
2.8. Processo de descarga de um poço de gás
lift
... 16
2.9. Projetos de instalações de gás
lift
... 17
3. SIMULADOR DE UM POÇO DE GÁS
LIFT
CONTÍNUO... 20
3.1. Introdução... 21
3.2. SGALI... 21
4. CONTROLADOR PROPOSTO... 26
4.1. Introdução... 27
4.2. Efeito da injeção de gás no poço... 27
4.3. Controladores baseados em conhecimentos... 28
4.4. Método de Gradiente... 30
4.5. A lógica do controle... 31
5. RESULTADOS... 41
5.1. Introdução... 42
5.2. Experiência sem o uso do controlador... 42
5.3.Experiência com o uso do controlador em laboratório... 44
6. CONCLUSÕES E PERSPECTIVAS... 52
7. BIBLIOGRAFIA... 54
Lista de Figuras
Figura 1.1. Curvas de desempenho de gás
lift
... 3
Figura 1.2. Comportamento da P
wfem função da variação da P
r... 4
Figura 2.1. Redução do peso da coluna pela liberação de gás... 6
Figura 2.2. Redução do peso da coluna pela injeção de gás... 7
Figura 2.3. Sistema típico de gás
lift
contínuo... 8
Figura 2.4. Válvula de gás
lift
... 10
Figura 2.5. Mecanismo Gás em Solução... 12
Figura 2.6. Curvas de performance típica para reservatório de gás em solução ... 12
Figura 2.7. Mecanismo capa de gás... 13
Figura 2.8. Curvas de performance típica para reservatório capa de gás... 13
Figura 2.9. Mecanismo influxo de água... 14
Figura 2.10. Curvas de performance típica para reservatório influxo de água... 14
Figura 2.11. Curva IPR modelo linear ... 15
Figura 2.12. Curva de IPR - Modelo de Vogel ... 16
Figura 2.13. Processo de descarga de um poço de gás
lift
... 17
Figura 2.14. Poço típico de gás
lift
contínuo ... 18
Figura 2.15. Gradientes de pressão em um poço de gás
lift
contínuo... 19
Figura 3.1. Tela inicial do simulador de controle de injeção de gás
lift
-SGALI...
...
21
Figura 3.2. Curvas IPR x TPR e P
wfx Q
gi... 22
Figura 3.3. Ponto de operação do poço com GLC... 23
Figura 3.4. Tela dos dados de entrada do
TraceLift
... 24
Figura 3.5. Tela de acompanhamento da simulação do
TraceLift
... 24
Figura 4.1. Curva de desempenho da vazão de gás injetado (Q
gi) x vazão de líquido
produzido (q
L)... 27
Figura 4.2. Arquitetura típica de um sistema baseado em conhecimento... 28
Figura 4.3. Esquema de um sistema de controle empregando representação de
conhecimentos na forma de regras de produção... 29
Figura 4.4. Sistema de controle automático da injeção de gás
lift
contínuo... 32
Figura 4.5 - Diagrama de blocos para o controle automático da injeção de gás
lift
... 33
Figura 4.7. Processo de obtenção da P
wf ótimaconsiderando o deslocamento do Setpoint
para a direita... 34
Figura 4.8. Processo de obtenção da P
wf ótimaconsiderando o deslocamento do Setpoint
para a esquerda... 35
Figura 5.1. Unidade Terminal Remota (UTR)... 42
Figura 5.2. Válvula Automática de Controle... 43
Figura 5.3. Transmissores de superfície... 43
Figura 5.4. Dados de campo de P
wfP
re SP adquiridos do poço UPN-37... 44
Figura 5.5. Evolução do controle automático de um poço de gás lift contínuo –
Experimento I... 45
Figura 5.6. Evolução do controle automático de um poço de gás lift contínuo –
Experimento II... 46
Figura 5.7. Evolução do controle automático de um poço de gás lift contínuo –
Experimento III... 47
Figura 5.8. Tela inicial de simulação de um poço de gás
lift
sem o uso do controlador –
Experimento I ... 48
Figura 5.9. Simulação do poço após o controlador Ter encontrado o ponto ótimo de
Trabalho- Experimento I... 48
Figura 5.10. Tela inicial de simulação de um poço de gás
lift
sem o uso do controlador –
Experimento II... 49
Figura 5.11. Simulação do poço após o controlador Ter encontrado o ponto ótimo de
Trabalho- Experimento II... 49
Figura 5.12. Tela inicial de simulação de um poço de gás
lift
sem o uso do controlador –
Experimento III ... 50
Figura 5.13. Simulação do poço após o controlador Ter encontrado o ponto ótimo de
Trabalho- Experimento III... 50
Lista de Tabelas
Tabela 5.1. Comparação das principais variáveis de um poço de gás
lift
simulado com o
software
TraceLift
não acoplado x acoplado ao controlador ... 51
Relação de Símbolos e Abreviaturas
A
bÁrea do fole (
bellow
)
A
vÁrea do orifício da válvula
BSW Percentual de Água no Fluído
CLP Controlador Lógico Programável
D Profundidade dos canhoneados (área fraturada do reservatório para possibilitar
o fluxo do fluido produzido)
DDC Direct Digital Control
ESC
Estação de Supervisão e Controle
G
faGradiente dinâmico médio acima do ponto de injeção de gás
G
fbGradiente dinâmico médio abaixo do ponto de injeção de gás
IP Índice de produtividade
IPR Inflow Performance Relationship
K
cConstante de proporcionalidade
K
oConstante para manter o Set Point ótimo (K
o= 10
-5)
kick-off
Descarga de um poço
L Profundidade da válvula operadora
MV Manipulated VariableNova P
wfNova Pressão de fluxo no fundo do poço (kgf/cm²)
OV
Abertura da Válvula
Packer
Peça de vedação da coluna de produção com o tubo de revestimento
P
ePressão estática (kgf/cm²)
PID Proporcional Integral Derivativo
P
rPressão de revestimento (kgf/cm²)
P
r refPressão de revestimento de referência (kgf/cm²)
P
r maxPressão de revestimento máxima (kgf/cm²)
P
r minPressão de revestimento mínima (kgf/cm²)
P
satPressão de saturação (kgf/cm²)
P
btPressão de gás no fole na temperatura da profundidade de assentamento da
válvula
P
tPressão na coluna de produção na profundidade da válvula (kgf/cm²)
P
wfPressão de fluxo no fundo do poço (kgf/cm²)
P
whPressão de fluxo na cabeça do poço (kgf/cm²)
PV Process Variable
P
vPressão de gás no espaço anular, na profundidade da válvula (kgf/cm²)
Q
giVazão de gás injetado (Mm³/d)
q
LVazão de líquido (m³/d)
q
LmaxVazão de líquido máxima (m³/d)
RGL Razão Gás Líquido
SCADA Sistema de aquisição de dados
SP
Set Point
Tubbing
Coluna de produção
UPN-37
Poço de Upanema 37
UTR
Unidade Terminal Remota
SUMÁRIO
O método de elevação por gás
lift
contínuo é o principal método de elevação artificial
utilizado, principalmente, para produção em poços submarinos devido a sua robustez e a larga
faixa de vazão que o poço pode produzir. Há um grande percentual de poços produzindo sob
este mecanismo no Brasil. Este tipo de método de elevação apresenta algumas características
próprias, sendo uma delas sua dinâmica lenta devido aos transientes e outra é a existência de
uma correlação entre a vazão de gás injetado e a vazão de óleo produzido. Controladores
eletrônicos têm sido utilizados para realizar ajustes em alguns parâmetros do poço e melhorar
a eficiência de injeção de gás lift.
Este trabalho apresenta um sistema inteligente de controle automático da injeção de
gás, baseando-se em regras de produção, que busca manter os poços equipados para gás
lift
contínuo produzindo o maior tempo possível, nas condições ótimas de operação e que faz os
ajustes automáticos necessários quando ocorre alguma perturbação no sistema. Mostra-se que
é possível, utilizando o sistema inteligente apresentado, exercer o controle da pressão de fluxo
no fundo do poço (P
wf) através da manipulação da abertura da válvula de controle de
ABSTRACT
The continuous gas lift method is the main artificial lifting method used in the oil
industry for submarine wells, due to its robustness and the large range of flow rate that the
well might operate. Nowadays, there is a huge amount of wells producing under this
mechanism. This method of elevation has a slow dynamics due to the transients and a
correlation between the injected gas rate and the of produced oil rate. Electronics controllers
have been used to adjust many parameters of the oil wells and also to improve the efficiency
of the gas lift injection system.
This paper presents a intelligent control system applied to continuous gas injection in
wells, based in production’s rules, that has the target of keeping the wells producing during
the maximum period of time, in its best operational condition, and doing automatically all
necessary adjustments when occurs some disturbance in the system.
The author also describes the application of the intelligent control system as a tool to
control the flow pressure in the botton of the well (P
wf). In this case, the control system
AGRADECIMENTOS
A Deus pela saúde e inspiração para realização desse trabalho.
Ao meu orientador, o Professor D.Sc. André Laurindo Maitelli pelo incentivo,
empenho e profissionalismo durante o desenvolvimento a elaboração deste trabalho.
Ao meu co-orientador, o Engenheiro M.Sc. Edson Henrique Bolonhini pelas inúmeras
sugestões que enriqueceram este trabalho, pela paciência, pelo empenho e profissionalismo.
À Empresa Petróleo Brasileiro S.A, pela oportunidade concedida.
Ao Engenheiro Luiz Sérgio da Petrobras pelo incentivo e colaboração.
Aos colegas da Petrobras especialmente ao Dirno, Jaime, Renato, Rogério, Salvador e
Sandra pelo incentivo e colaboração.
A todos os colegas e professores do Programa de Pós-Graduação em Engenharia
Elétrica da Universidade Federal do Rio Grande do Norte, pela colaboração.
Aos colegas Ewerton Moura e João Maria da UFRN pela valiosa colaboração.
A todos, enfim, que direta ou indiretamente contribuíram para o sucesso desse trabalho.
Às minhas filhas, Rafaela, Erika e Corina, e a minha esposa Suzana, que dividiram
comigo, com paciência e compreensão, todas as alegrias e angústias deste desafio.
CAPÍTULO 1
O método de elevação artificial por gás
lift
é largamente utilizado na produção de
petróleo. Baseia-se na redução do peso da coluna de óleo, dentro do poço, através da injeção
de gás no fundo do mesmo, [13]. É um método relativamente barato, simples de instalar e
requer menos manutenção quando comparado a alternativas, tais como bombeio centrífugo
submerso, bombeio mecânico e bombeio por cavidade progressiva. Um poço equipado para
produzir por gás
lift
contínuo necessita ser analisado com freqüência, pois seu desempenho
está estreitamente relacionado às condições de produção do reservatório e às características de
fluxo, aspectos estes que podem variar ao longo da vida produtiva da instalação.
Esta análise é normalmente realizada a partir da caracterização dos fluidos
produzidos, das tubulações de superfície e sub-superfície e da utilização de procedimentos de
cálculo para determinação das perdas de carga do escoamento multifásico, desde o fundo do
poço até o tanque de armazenamento. Há algum tempo essa análise era dificultada por utilizar
ábacos e cálculos manuais. Hoje, com o uso de computadores, de simuladores de fluxo
multifásico e de curvas de modelagem de comportamento de reservatórios, informações sobre
o comportamento do poço podem ser obtidas como função de alterações em suas condições de
produção. O processo, no entanto, além de trabalhoso, não é preciso, pois utiliza modelos
empíricos ou semi-empíricos para descrever o comportamento de reservatório, do fluxo
multifásico e das trocas térmicas, além de requerer ajuste individual para cada poço, [3].
O gás injetado na coluna de produção provoca a redução da densidade média dos
fluidos dentro dela, reduzindo o gradiente de pressão em seu interior. É possível, com isso,
reduzir a pressão de fluxo no fundo do poço (P
wf), o que permite aumentar a vazão de líquido
produzido pelo reservatório. Uma injeção excessiva de gás, no entanto, pode anular este efeito
e reduzir a eficiência do método de elevação. Assim, há uma razão ideal entre volume de gás
injetado e volume de líquido produzido conforme mostra a figura 1.1.
De uma maneira geral, pode-se afirmar que para cada poço, a cada momento, existe
uma vazão ótima de injeção de gás que resulta na melhor condição de produção. Embora um
poço possa estar adequadamente dimensionado no início de sua vida produtiva, com o passar
do tempo mudanças no sistema de produção, tais como: alterações da pressão ou do índice de
produtividade do reservatório, da fração de água produzida, da temperatura ambiente, do
eventual acumulo de condensado no espaço anular, da redução no diâmetro na coluna de
produção (
tubbing
)
devido a deposição de parafina, podem desestabilizar sua condição
Usando um controlador eletrônico, onde algumas dessas variáveis possam ser
adquiridas e analisadas, ajustes podem ser realizados no sistema de modo a produzir
resultados ótimos. Controladores eletrônicos têm provado ser efetivos na manutenção
otimizada da produção, [2].
Este trabalho apresenta um sistema de controle automático para o gerenciamento da
injeção de gás em um poço com gás
lift
, visando otimizar a relação entre o volume de óleo
produzido e o consumo de gás injetado. O gerenciamento da quantidade de gás a ser injetado
é feito através do controle da pressão de revestimento do poço por meio de um algoritmo de
controle especificamente desenvolvido que permite, também, coleta e armazenamento de
dados. São utilizados, para tanto, dois sensores de pressão - um para a pressão de fundo e
outro para a de revestimento - e um
CLP
(Controlador Lógico Programável) que comanda a
posição da válvula controladora de injeção de gás.
Figura 1.1. Curvas de desempenho de gás
lift
.
Vazão de líquido (
qL
) em m³/d
Pressão de fundo do poço (P
wf
) em PSI
Pressão de revestimento ( P
r
) em PSI
Vazão de gás Mm³/d
P
wP
rO princípio do controle é buscar a mínima pressão de fluxo no fundo do poço (P
wf)
sempre que haja perturbação no sistema, ou por conveniência do operador. O valor ideal de
P
wf, num dado momento, será determinado automaticamente, pelo sistema inteligente a partir
dos resultados obtidos quando da variação da P
r(pressão de revestimento) entre P
r min(pressão
que garanta a menor vazão de gás através da válvula de gas
lift
que mantenha o poço estável)
e P
r max(pressão acima da qual haverá abertura de alguma válvula de descarga), conforme
figura 1.2, [5].
As condições iniciais e os valores de P
r maxe P
r minsão obtidos de um simulador
numérico que, através de dados conhecidos gera informações sobre as condições de operação
do poço, fornecendo uma P
wfteórica que servirá como referência inicial para o controlador.
O presente trabalho está dividido da seguinte forma: a partir do capítulo 2, são
mostrados aspectos gerais sobre o método de elevação artificial por gás
lift
contínuo, são
apresentados dois simuladores numéricos para predição de comportamento de poços operados
por este método, e é proposto um controlador para estes poços. A proposta de controle é
aplicada a um poço simulado e os resultados obtidos são apresentados para análise e
conclusões.
Figura 1.2 – Comportamento da P
wfem função da variação da P
rVazão de líquido em m³/d
Pressão de fluxo no fundo do poço (
P
w
f ) em PSI
Pressão de revestimento ( P
r
) em PSI
Vazão de gás Mm³/d
P
rP
r minP
r maxP
wfCAPÍTULO 2
2.1- INTRODUÇÃO
Neste capítulo são discutidos alguns conceitos necessários para o entendimento do
método de elevação por gás lift contínuo.
2.2- GÁS
LIFT
Gás
lift
é um método de elevação de fluidos usado depois que o fluxo natural do poço
cessa, ou para suplementá-lo, onde gás a alta pressão é utilizado para gaseificar o fluido
produzido, entre o ponto de injeção de gás até a superfície. É a forma de elevação artificial
que mais se assemelha ao processo de fluxo natural, podendo ser considerada uma extensão
do processo de elevação natural, [18].
Num poço de fluxo natural, com o fluido subindo para a superfície, a pressão na
coluna de fluido é reduzida e o gás sai de solução. O gás livre eleva-se, deslocando o óleo,
reduzindo a densidade média do fluido na coluna de produção, reduzindo assim, o peso da
coluna de fluido sobre a formação. Esta redução do peso da coluna produz uma pressão
diferencial entre o fundo do poço e o reservatório, causando o fluxo de fluidos no poço (figura
2.1).
Reservatório
Linha de produção
Óleo e gás da formação.
Quando um poço produz água, ou a quantidade de gás livre na coluna é reduzida, a
pressão diferencial entre o fundo do poço e o reservatório pode ser mantida corrigindo-se o
aumento da densidade média na coluna de produção com injeção de gás, como mostrado na
figura 2.2, [1].
Dá-se o nome de gás
lift
contínuo ao processo onde o gás é continuamente injetado no
espaço anular do poço a uma pressão tal que permita penetrar através de um orifício no fundo
da coluna de produção.
Óleo e gás da formação. Reservatório
Linha de produção
Injeção de gás
Óleo e gás da formação
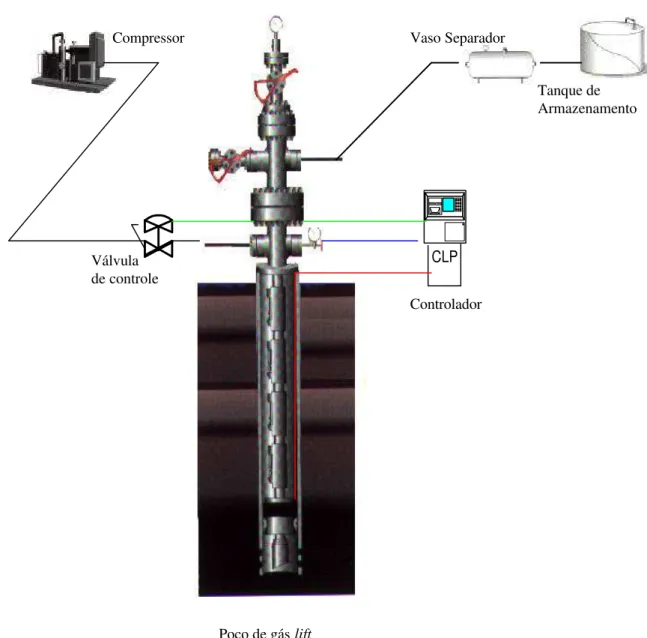
Um sistema típico de gás
lift
contínuo é apresentado na Figura. 2.3.
2.3- VANTAGENS E LIMITAÇÕES DO GÁS
LIFT
CONTÍNUO
O gás
lift
contínuo (GLC) é apropriado para quase todo tipo de poço que requer
elevação artificial. Pode ser usado para elevar o óleo artificialmente em poços onde a pressão
do reservatório não é mais suficiente para elevar o fluido até a superfície, ou para aumentar a
vazão de produção. Usualmente será mais eficiente e menos oneroso para poços que
produzem com altas vazões gás-líquido.
As vantagens do gás
lift
podem ser resumidas em:
1.
Para um sistema já instalado, o custo de equipamentos é geralmente mais baixo que para
outras formas de elevação artificial, particularmente para poços profundos.
CLP
Compressor
Vaso Separador
Controlador
Válvula
de controle
Tanque de
Armazenamento
Poço de gás
lift
2.
Em termos de flexibilidade não pode ser comparado com outro método de elevação. As
instalações podem ser projetadas para pequenas ou grandes profundidades, para produzir
de um a milhares de barris por dia.
3.
A produção pode ser controlada da superfície.
4.
A produção de fluido com material abrasivo não afeta os equipamentos de gás
lift
na
maioria das instalações.
5.
O pouco movimento relativo entre as partes num sistema de gás
lift
proporciona uma
longa vida útil comparado a outros métodos de elevação.
6.
Os custos operacionais são, usualmente, relativamente baixos.
7.
O principal equipamento do sistema de gás
lift
(o compressor de gás) é instalado na
superfície, facilitando a inspeção e manutenção.
As principais
Limitações do gás
lift
são:
1.
Necessidade de gás disponível em altas pressões. Em algumas instâncias, ar, gases de
exaustão e nitrogênio podem ser usados, mas são geralmente mais caros e mais difíceis de
trabalhar.
2.
Uma grande distância entre o poço e a fonte de alta pressão de gás pode limitar seu uso.
Esta limitação pode ser contornada, em alguns poços, através do uso de capa de gás como
fonte de gás de elevação e o retorno desse gás para a capa dando-se através da injeção em
outro poço.
3.
O gás misturado ao óleo tem que ser separado e tratado na superfície.
4.
Gás corrosivo pode aumentar os custos operacionais, sendo necessário tratá-lo ou secá-lo
antes de usá-lo para elevação, [1].
5. O custo de instalações inicial é alto (considerando-se compressores e linhas de injeção),
tornando-se atrativo quando o número de poços cresce.
2.4- VÁLVULAS DE GÁS
LIFT
As válvulas de gás
lift
são, fundamentalmente, válvulas de pressão introduzidas entre a
coluna de produção e o revestimento. São alojadas em tubos designados de mandris. Uma
válvula de gás
lift
é projetada para permanecer fechada até certas condições de pressões no
anular e no tubo. Quando a válvula abre, permite passar por ela gás ou fluido do anular para a
coluna de produção. A válvula de gás
lift
pode também ser arranjada para permitir fluxo do
gerar a força que mantém a válvula fechada são: um fole de metal carregado com gás sob
pressão (usualmente o nitrogênio) e/ou uma mola comprimida. Em qualquer caso, a pressão
de abertura da válvula é ajustada na superfície, antes de sua instalação no poço. As forças que
agem no sentido das válvulas de gás
lift
abrirem são originadas a partir da pressão no anular e
da pressão de fluido no tubo, [17]. Para o cálculo da pressão de fechamento e abertura da
válvula duas hipóteses devem ser consideradas:
a)
A válvula se encontra totalmente fechada (Figura 2.4 a
)
b)
A válvula se encontra totalmente aberta (Figura 2.4 b)
Onde:
A
b= área do fole (
bellow
)
A
v= área do orifício da válvula
P
t= pressão na coluna de produção na profundidade da válvula
P
v= pressão de gás no espaço anular, na profundidade da válvula
P
vo= pressão de gás no espaço anular, na profundidade da válvula com a mesma aberta
P
vc= pressão de gás no espaço anular, na profundidade da válvula com a mesma fechada
P
bt= pressão de gás no fole na temperatura da profundidade de assentamento da válvula
R = A
v/A
bFigura 2.4. Válvula de gás
lift.
P
tA
vA
vP
tA
bA
bP
v(A
b-A
v)
P
t.A
vP
bt.A
bP
bt.A
bP
t.A
vP
v(A
b-A
v)
a) Válvula fechada
b) Válvula aberta
Coluna de
produção
Espaço
anular
Coluna de
produção
Espaço
anular
Revestimento
Revestimento
)
R
-1
R
(
P
)
R
-1
1
(
P
P
vc=
bt−
t(
1
-
R
)
P
.
R
P
P
P
vo=
bt=
vo−
t(2.1)
2.5- ASPECTOS ECONÔMICOS
A primeira consideração na seleção de um equipamento de elevação artificial é que o
equipamento selecionado atinja a produção desejada no custo mais econômico por unidade de
produção. Um estudo de elevação artificial para um poço ou um grupo de poços deverá ser
baseado nas características do reservatório. O gás
lift
contínuo, por exemplo, é o método ideal
de elevação em campos onde a manutenção da pressão de reservatório se dá através da injeção
de gás.
Desde que uma estação de compressão e linhas de alta pressão já estejam instaladas
no campo, um equipamento adicional para colocar um poço com gás
lift
custa muito pouco
comparado com alguns outros tipos de equipamentos de elevação. O baixo custo operacional
associado ao gás
lift
é enfatizado ainda para poços profundos, poços que produzem areia, alta
razão gás líquido (RGL) e poços com mudança de profundidade de elevação.
2.6- MECANISMOS DE PRODUÇÃO
Os reservatórios de petróleo podem ser classificados de acordo com o mecanismo de
manutenção de pressão aos quais estão submetidos e há três tipos básicos:
•
Mecanismo gás em solução
Dá-se nos casos em que o óleo no reservatório, possui gás em solução. À medida que o
óleo vai sendo produzido, a pressão interna do reservatório vai reduzindo e, como
conseqüência, os fluidos lá contidos se expandem. Ainda devido à redução da pressão, o
volume dos poros diminui em função da compressibilidade efetiva da formação. O processo é
contínuo, de modo que a produção de fluido provoca redução de pressão, que acarreta a
expansão de fluidos e redução dos poros, que por sua vez resulta em mais produção.
como apresentado nas Figuras 2.5 e 2.6, [18]. É geralmente considerado o menos efetivo tipo
de mecanismo de recuperação.
•
Mecanismo de Capa de Gás
O segundo tipo de mecanismo para movimentação de hidrocarbonetos depende da
energia armazenada no gás do reservatório. Alguns reservatórios contêm mais gás do que
pode estar dissolvido no óleo sob pressão e temperatura. O excesso de gás, em função de sua
menor densidade, eleva-se para o topo do reservatório e forma uma capa de gás sobre o óleo.
Figura 2.6. Curvas de performance típica para reservatório de gás em solução
.
0 20 40 60 80 100
Percentual da pressão original do reservatório
Razão gás óleo em pés³ por bbl
Óleo produzido em percentual do original
Razão gás óleo
Produção
Reservatório
Figura 2.5. Mecanismo Gás em Solução.
Essa capa de gás é uma fonte importante de energia porque o gás se expande, ocupando os
espaços porosos anteriores ocupados por líquido e gás produzido. Como o gás tem uma
compressibilidade muito alta, a sua expansão ocorre sem que haja queda significativa da
pressão. Como pode ser visto nas Figuras 2.7 e 2.8, [18]. O mecanismo de capa de gás é mais
eficiente que o de gás em solução, mas apresenta, ao longo da vida produtiva, altas razões
Gás-líquido de produção.
Figura 2.7. Mecanismo capa de gás.
Reservatório
Gás
Óleo e gás
0 20 40 60 80 100
Óleo produzido em percentual do original
Percentual da pressão original do reservatório
Razão gás óleo em pés³ por bbl
Figura 2.8. Curvas de performance típica para
reservatório capa de gás.
•
Mecanismo de influxo de água.
Quando a formação contém um reservatório de água uniformemente poroso e
contínuo, com uma grande área, em contato com o reservatório de óleo, esta grande
quantidade de água representa uma grande fonte de energia que pode ajudar na produção de
óleo e gás mantendo a pressão do reservatório praticamente inalterada com a produção, mas
apresentando produção de água crescente com o passar do tempo. As figuras 2.9 e 2.10
ilustram o mecanismo chamado “Influxo de Água”, [18]. O
Mecanismo de influxo de água
é o
mais eficiente dos processos de recuperação de óleo.
Reservatório
Figura 2.9. Mecanismo influxo de água.
Água
Óleo e gás
0 20 40 60 80 100
Percentual da pressão original do reservatório
Razão gás óleo em pés³ por bbl
Óleo produzido em percentual do original
Produção
2.7 - DESEMPENHO DE UM POÇO DE PETRÓLEO
O desempenho de um poço é determinado por inúmeros fatores. Os principais são o
fluxo através do reservatório até o poço e o fluxo na coluna de produção, do fundo do poço
até a superfície. O fluxo no reservatório é influenciado pelas características do reservatório
tais como: pressão, permeabilidade e composição do fluido. O fluxo na coluna é função do
tipo de equipamento de elevação utilizado. O fluxo no reservatório é usualmente expresso em
termos de produtividade, que indica a relação entre a produção de líquido e a pressão de fluxo
no reservatório. Uma das maneiras de expressar a produtividade do poço é com o Índice de
Produtividade (IP), que é a relação entre a vazão de líquido (q
L) produzida e o diferencial de
pressão entre a pressão estática (P
e) e a pressão de fluxo no fundo do poço (P
wf).
Assim, a produtividade pode ser expressa por
A relação acima é denominada IPR (
Inflow Performance Relationship
).
Considerando que o índice de produtividade permaneça constante, independente da
vazão de líquido a IPR se apresenta como uma reta, conforme figura 2.11.
Este modelo de IPR só se aplica aos casos em que não há presença de gás livre no
reservatório. A presença de gás livre no meio poroso diminui a permeabilidade relativa ao
qL / qLmax Pwf
IPR
Figura 2.11. Curva IPR modelo linear
wf L
P
-P
q
IP
e
=
(2.3)
IP
)
P
-P
(
óleo. Esta variação de permeabilidade com a pressão faz com que o índice de produtividade
também varie.
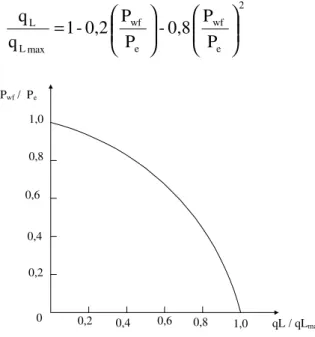
Vogel (1968) determinou curvas IPR para poços produzindo de reservatórios com
mecanismo de gás em solução para valores de P
wfmenores que P
sat,(pressão de saturação
acima da qual todo gás estará dissolvido no óleo). Traçou essas curvas considerando vários
momentos dos reservatórios e propôs o modelo dado pela expressão abaixo, cuja curva é
representada na figura 2.12, [1].
2.8- PROCESSO DE DESCARGA DE UM POÇO DE GÁS
LIFT
Para que um poço seja equipado para produzir com gás
lift
, o mesmo é primeiramente
amortecido com um fluido de densidade controlada, que fornece uma pressão no fundo maior
que a pressão estática. Desta forma, para habilitar a injeção de gás pela válvula operadora de
gás
lift
é necessário remover tal fluido. O processo de retirada desse fluido de amortecimento
através da injeção de gás do espaço anular para a coluna é denominado de descarga do poço
ou
kick-off
. A figura 2.13 ilustra o processo de descarga de um poço que está com o anular e a
coluna cheios com fluido de amortecimento.
A operação de descarga estará completada, e o poço apto, a operar por gás
lift
contínuo, quando a ultima válvula da coluna de produção (a mais profunda) estiver descoberta
permitindo a passagem de gás, e as demais, acima dela, estiverem fechadas (o que se dará
quando a pressão no revestimento estiver abaixo de um valor denominado P
r maxde operação).
0 0,2 0,4 0,6 0,8 1,0 0,2
0,4 0,6 0,8 1,0
(2.5)
2
e wf e
wf max
L L
P
P
0,8
-
P
P
0,2
-1
q
q
=
Pwf / Pe
2.9- PROJETOS DE INSTALAÇÕES DE GÁS
LIFT
A versatilidade do gás
lift
permite projetar instalações que atendem às condições
encontradas no presente, bem como antecipando condições futuras. O tipo de válvula de gás
lift
, o tipo de instalação, o
set
de pressões das válvulas, o espaçamento entre elas, o
comprimento do tubo e os equipamentos de superfície são variáveis que afetam a produção do
poço.
O propósito primeiro das válvulas de gás
lift
é primeiro descarregar o fluido do poço,
permitindo assim, que o gás seja injetado no ponto mais profundo da coluna e segundo, é
controlar a injeção de gás sob ambas as condições descarregando ou operando.
A localização das válvulas na coluna de produção é função da pressão disponível para
descarregar o fluido, do peso ou gradiente do fluido no poço no momento da descarga, da
resposta da curva IPR do reservatório e da pressão na linha de escoamento na superfície.
Na maioria dos casos estas informações são disponíveis. No entanto, em muitos casos
a IPR é desconhecida. A seleção de uma dada vazão de descarga não significa que a
instalação na verdade produza a quantidade de fluido de projeto. Isto serve somente como um
critério para assegurar que a instalação descarregará o poço até um ponto ótimo de operação,
enquanto este é alimentado com fluido na vazão de projeto.
Figura 2.13. Processo de descarga de um poço de gás
lift
.
Aberta
Aberta
Aberta
Aberta
Aberta
Fechada
Aberta
Aberta
Fechada
Fechada
Aberta
Aberta
Fechada
Fechada
Fechada
Aberta
Gás
Gás
Gás
Gás
A figura 2.14 mostra uma típica instalação de gás lift contínuo com cinco válvulas das
quais quatro são usadas como válvulas de descarga e uma como válvula operadora.
A figura 2.15 ilustra os gradientes de pressão envolvidos num poço de gás
lift
contínuo. Nesta ilustração é plotado um gradiente médio de pressão abaixo do ponto de
injeção e um gradiente médio de pressão acima do ponto de injeção.
Packer
Válvula operadora
Válvulas de descarga
P
whP
rFigura 2.14. Poço típico de gás
lift
contínuo
A pressão de fluxo no fundo do poço é expressa como:
P
wf= P
wh+ G
faL + G
fb(D-L)
Onde:
P
wf= pressão de fluxo no fundo do poço;
P
wh= pressão de fluxo na cabeça do poço;
G
fa= gradiente dinâmico médio acima do ponto de injeção de gás;
G
fb= gradiente dinâmico médio abaixo do ponto de injeção de gás;
L = profundidade da válvula operadora;
D = profundidade dos canhoneados (área fraturada do reservatório para possibilitar
o fluxo do fluido produzido);
Observa-se que uma ação eficaz da elevação por GLC reduzirá G
fa,
reduzindo P
wf.
Como a vazão do reservatório aumenta com a redução de P
wf(2.3 e 2.4), a vazão do poço será
uma função de como a injeção de gás através da válvula operadora modificará o gradiente do
fluido acima dela, [4].
Figura 2.15. Gradientes de pressão em um poço de gás
lift
contínuo.
P
whPressão na coluna Pressão de revestimento
G
faG
fbP
wfPressão
P
eD
L
D-L
Pressão de injeção de gás
∆P na VGL
Gradiente de pressão do gás no espaço anular
Gradiente de pressão do sistema com elevação por GLC
CAPÍTULO 3
3.1- INTRODUÇÃO
Neste capítulo são apresentados dois simuladores numéricos de poços operados por
GLC, sendo um simulador de curvas em regime permanente (
SGALI
) e o outro um simulador
de comportamento dinâmico (
TraceLift
).
3.2- SGALI
O programa
SGALI
é um simulador de regime permanente desenvolvido pelo
Engenheiro Ewerton Moura (Departamento de Engenharia de computação e
Automação/UFRN) que descreve o comportamento da pressão de fluxo de fundo de um poço
em função da variação da pressão de revestimento. Foi desenvolvido em ambiente de
programação
C++
, e utiliza curvas de resposta de dois programas comerciais de verificação
para GLC:
MARLIN
(Petrobrás) e
Wellflo
(Edimburgh Ptroleum System Ltd.).
Para efeito de simulação, o usuário seleciona, inicialmente, algumas características
físicas do poço tais como, diâmetro da linha de escoamento, da coluna de produção
(
tubbing
)
e do orifício de injeção da válvula de gás
lift
, figura 3.1. A seguir, escolhem-se os valores para
Pressão Estática (P
e), Relação Gás-Líquido de formação (RGL), Pressão na Cabeça do Poço
(P
wh) e Percentual de Água no Fluído (BSW). Este procedimento permite a visualização dos
pontos de operação do poço (IPRx P
wh) para vários valores de vazão de gás
lift
, bem como o
lugar geométrico da P
wf(Pressão no Fundo do Poço) em função da vazão de gás
lift,
que é
obtida a partir da interpolação dos citados pontos de operação (Figura 3.2).
Figura 3.2 – Curvas IPR x
P
whe P
wfx Q
giComo a Vazão de gás através da válvula de gás
lift
é função da P
r, assim, no gráfico
P
wfx Q
gi(Vazão de Gás Injetado), podem também ser traçadas curvas de comportamento da
vazão de gás
lift
para distintos valores de P
r(Pressão de revestimento).
Escolhendo-se valores para P
r max, P
r min, e P
r inicialo programa apresentará, neste
gráfico, o intervalo das vazões de injeção de gás
lift
possíveis entre
P
rmaxe P
r mine o ponto de
operação (P
wf, Q
gie q
L(Vazão de Líquido)) obtido a partir do valor de P
r inicial.
Finalmente, de posse dessas curvas e utilizando-se as regras de controle
implementadas no controlador pode-se variar o valor de P
r iniciale observar o comportamento
do ponto de operação até que seja encontranda a P
wfmínima. A figura 3.3 dá uma visão geral
Figura 3.3 – Ponto de operação do poço com GLC
.
3.3 -TRACELIFT
O programa
TraceLift
é um simulador de comportamento dinâmico de poços operado
por GLC, desenvolvido pelo Eng. Kwon Il Choi (UN-RIO/PETROBRAS) que objetiva a
verificação e o acompanhamento de instalações de gás lift contínuo, tendo sido especialmente
adaptado para uso com o controlador aqui apresentado.
A figura 3.4 apresenta a tela de entrada dos dados de configuração do poço, onde são
informados os dados referentes à geometria do sistema, reservatório, características dos
fluidos produzidos, posição e calibração das válvulas de gás
lift
, dentre outros.
Figura 3.4. Tela dos dados de entrada do
TraceLift.
Para o trabalho em conjunto com o controlador ora proposto, o programa
TraceLift
disponibiliza, através da saída serial do computador, todos os valores de vazões e pressões
associado ao presente
time step
de simulação e recebe como dados de entrada, para os
cálculos do próximo passo no tempo, a nova abertura do
choke
de injeção. O sincronismo de
ação e decisão, entre os dois programas (
TraceLift
– Programa de controle) é montado através
CAPÍTULO 4
4.1-INTRODUÇÃO
Neste capítulo, é apresentada a técnica desenvolvida para o controle de injeção de gás
lift
, que utiliza conhecimentos heurísticos na forma de regras de produção e método de busca
empregando gradiente. Mostra-se também como se configura a lógica do controle.
4.2-EFEITO DA INJEÇÃO DE GÁS NO POÇO
Como já visto no capítulo 2, o gás injetado na coluna de produção provoca a redução
da densidade média dos fluidos dentro da mesma, reduzindo o gradiente de pressão ao longo
da coluna. É possível, com isso, reduzir a pressão de fluxo no fundo do poço (P
wf), o que
permite aumentar a vazão de líquido produzido pelo reservatório.
A injeção excessiva de gás, no entanto, em função do aumento do efeito das forças de
atrito ao longo do escoamento, pode anular este efeito e reduzir a eficiência do método de
elevação. Assim, há uma razão ideal entre volume de gás injetado e volume de líquido
produzido, que maximiza este último, ou seja, que minimiza a
P
wf,conforme mostra a fig. 1.1.
De uma maneira geral pode-se afirmar que para cada poço, a cada momento, existe uma vazão
ótima de injeção de gás que resulta na melhor condição de produção, como mostrado na
figura 4.1, [2].
Vazão de gás lift Mm³/d
Vazão de líquido em m³/d
Poço 1
Poço 2
Poço 3
Poço 4
Embora um poço possa estar adequadamente dimensionado no início de sua vida
produtiva, com o passar do tempo, mudanças no sistema de produção (tais como alterações da
pressão ou do índice de produtividade do reservatório, da fração de água produzida ou da
redução no diâmetro da coluna de produção devido à deposição de parafina) podem
desestabilizar sua condição operacional. A monitoração contínua de seu comportamento é,
portanto, aconselhável para que se mantenha a melhor condição de produção. Um bom ajuste
na quantidade de gás injetado, além de maximizar a produção de óleo, reduz os gastos com
energia para compressão do gás.
4.3-CONTROLADORES BASEADOS EM CONHECIMENTOS
Regras de produção do tipo SE (condição) ENTÃO (ações) podem ser utilizadas para
incorporar à máquina a experiência heurística do operador humano. Muitas vezes, mesmo sob
a ausência de um modelo matemático preciso ou de algoritmos bem definidos, o operador
humano é capaz de agir sobre uma dada planta, utilizando a experiência acumulada ao longo
dos tempos.
A arquitetura mais simples de um sistema baseado em conhecimento envolve um
banco de conhecimentos, no qual as regras estão armazenadas num banco de dados. As
medidas e as informações sobre as condições da planta a ser controlada estão armazenadas em
uma máquina de inferência. Esta deverá deduzir as ações a serem tomadas em função das
informações dos bancos de dados e de conhecimentos. A figura 4.2 mostra um diagrama de
blocos de um sistema baseado em conhecimentos, com interface para interação com o meio
ambiente.
Interface com o Meio Ambiente
Banco de
Dados
Banco de
Conhecimentos
Máquina de Inferência
A máquina de inferência executa, usualmente, os seguintes passos:
Passo 1: Busca de regras no banco de conhecimentos que tenham as condições satisfeitas, em
termos do conteúdo do banco de dados (casamento do antecedente).
Passo 2: Se houver uma ou mais regras com as condições satisfeitas
Então selecionar uma (resolução de conflito)
Senão, retornar ao Passo1.
Passo 3: Executar a ação descrita na regra selecionada e retornar ao passo 1.
As regras de produção podem ser utilizadas em sistema de controle em três níveis
hierárquicos conforme mostrado na figura 4.3.
O nível hierárquico inferior corresponde ao Controle Direto Digital, empregando
controladores baseados em conhecimentos, no caso, representados por regras de produção.
Assistente
usando
Regras de Produção
Registro de Dados
Supervisor
usando
Regras de Produção
Controlador
usando
Regras de Produção
Planta
Operador
off-line
Data Logging
on-line
SP
PV
MV
Figura 4.3. Esquema de um sistema de controle empregando representação de conhecimentos na forma de regras de produção. As siglas utilizadas são
SP=Set Point, PV=Process Variable, MV=Manipulated Variable e DDC=Direct Digital Control .
DDC
alarmes
Correção
O nível hierárquico intermediário compreende a utilização de bases de conhecimento
para supervisionar a operação geral da planta controlada, em tempo real, adquirindo sinais de
alarmes e de controle, podendo interagir com o operador em termos de correção e
monitoração do sistema.
O nível hierárquico superior corresponde à operação
off-line
para dar assistência ao
operador, quer na forma de consulta sobre procedimentos operacionais de rotina, quer no
treinamento de novos recursos humanos, [11].
4.4-MÉTODO DE GRADIENTE.
Também conhecido por método de Gauchy ou de Máximo Declive (Steepest Descent).
É um dos métodos mais antigos e conhecidos para minimização de uma função de
n
variáveis.
Devido à sua simplicidade ainda é bastante aplicado, porém, como veremos, pode convergir
muito lentamente. Ainda assim o método de gradiente é importante, devido à sua base teórica
e à sua facilidade de análise. Vale ainda ressaltar que muitos dos métodos com melhores
condições de convergência são resultantes de modificações nesse método.
O método utiliza somente derivadas de primeira ordem de f(x). Como o gradiente
aponta na direção de maior crescimento da função no ponto, o método procura em cada ponto
caminhar na direção oposta. Portanto, a direção de busca é a direção oposta ao gradiente,
-
∇
f (x). Dado o ponto x
ktemos que:
x
k+1= x
k– ?
k.
∇
f (x
k)
ou, utilizando uma direção unitária
x
k=1= x
k– ?
k. (-
∇
f (x
k)/ ||-
∇
f (x
k) ||)
ALGORITMO DE GRADIENTE
Início
(Dados f: R
n? R continuamente diferenciável
? = precisão desejada)
Escolha x
0e R
n;
Faça k igual a zero;
Execute uma busca unidirecional na direção h
kdeterminando x
k= x
k+ ?
kh
k;
Faça k igual a k+1
Fim enquanto;
Fim.
A partir de x
0procuramos um ponto estacionário k
ktal que
∇
f (x
k) = 0. Esta é uma
condição necessária para identificação de um ponto de mínimo local.
A determinação de ?
kpode ser feita de três maneiras:
i) Utilizando qualquer método de busca unidirecional.
ii) Dando-se passos adaptativos nas direções de busca: fixamos um valor para ? nas
iterações iniciais e, à medida que nos aproximamos do ponto de mínimo local, vamos
decrescendo-o. O controle deste valor está associado ao menor número de passos, devendo-se
ainda ter o cuidado para que a pesquisa não oscile em torno de um ponto de mínimo. Uma
forma de controlar este ? é através do ângulo entre as direções sucessivas.
iii) Minimizando f (x) na direção h
k. Ou, determinando ?
ktal que:
df(x
k– ?
k.
∇
f (x
k) / d? = 0, [9].
4.5-A LÓGICA DO CONTROLE
Controladores eletrônicos de fluxo têm sido empregados para melhorar a eficiência
dos processos de injeção de gás
lift
. Esses sistemas de controle, que integram sensores
eletrônicos de pressão com controladores PID (Proporcional Integral Derivativo), geralmente
resultam numa melhoria de retorno do investimento para instalações de gás lift. O uso mais
eficiente de injeção de gás através de sistemas de controle automático de gás
lift
resulta em
menor custo de injeção e, em alguns casos, sensível aumento na produção de óleo.
efetivos na manutenção da produção dos poços e podem ser diretamente, ou remotamente,
ligados através de rádios modens a uma central de controle supervisório e de aquisição de
dados (SCADA), [2].
Neste trabalho, o gerenciamento da quantidade ótima de gás a ser injetado é feito
através do controle da pressão de revestimento do poço (P
r). São utilizados, para tanto, dois
sensores de pressão - um para a pressão de fundo e outro para a de revestimento - e um
CLP
(
controlador lógico programável
) que permite coleta/armazenamento de dados e comanda,
através de um algoritmo de controle, a abertura e fechamento da válvula controladora de
injeção de gás na superfície. Tanto as pressões de fundo quanto de revestimento podem ser
obtidas também de simuladores de gás
lift
. A figura 4.4 mostra os principais componentes do
sistema de automação de gás
lift
.
CLP
Figura 4.4. Sistema de controle automático da injeção de gás
lift
contínuo.
Sensor de pressão de fundo
Sensor de pressão
de revestimento
Válvula de controle
de injeção
Gás
Fluido
produzido
SIMULADOR
DE GÁS
LIFT
P
wfP
rAbertura da
válvula (OV)
O diagrama de blocos para o controle automático da injeção de gás
lift
é apresentado
na figura 4.5.
Depois de estabelecidas as regras de produção e implementadas no CLP, o controlador
busca e mantém a P
wfnum menor valor. O valor ideal de P
wf, num dado momento é
determinado automaticamente pelo sistema inteligente a partir dos resultados obtidos pela
variação da P
rentre P
rmine P
rmax. Cada poço, de acordo com as características do reservatório
e do projeto de gás
lift
nele instalado, apresenta uma curva peculiar de comportamento da P
wfem função da variação da P
r, conforme mostrado na figura 4.6.
Figura 4.6. Possíveis comportamentos das curvas P
wfem função da
variação da P
re das condições de operação do poço.
P
rP
wfP
r minP
r maxPoço 5 Poço 1 Poço 2 Poço 3
Poço 4
Figura 4.5 - Diagrama de blocos para o controle automático da injeção de gás
lift
.
P
rSP P
wfP
rSP
+
-+