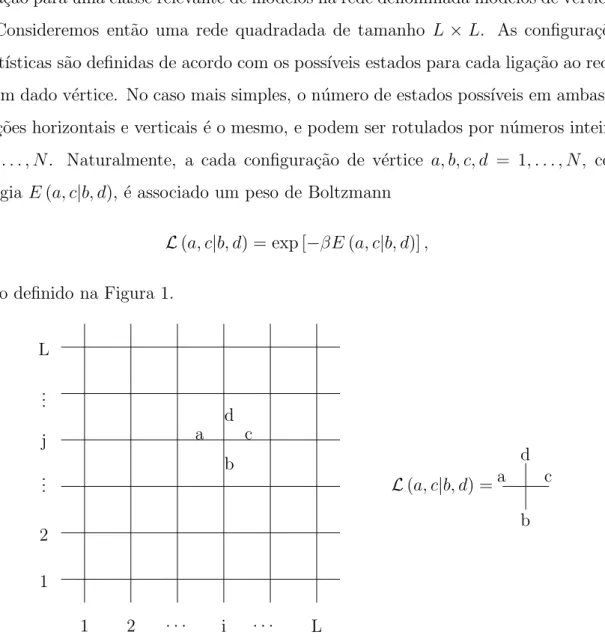
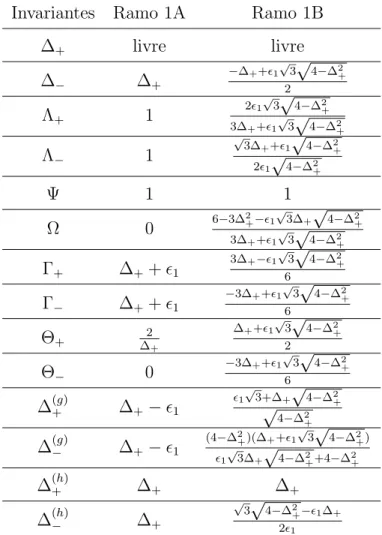
A equação de Yang-Baxter para modelos de vértices com três estados
Texto
Imagem



Documentos relacionados
Não se está perante a situação de uma única falta injustificada; só se pode falar em falta de assiduidade se houver alguma continuidade, o que não implica que tenham de ser faltas
Pode haver alguns acordos prévios, como visto na classificação proposta em trabalho anterior (GUERRERO, 2006), mas estes são propostos sempre mantendo elevado
Em média, a Vivo forneceu a melhor velocidade de download para os seus clientes em 2020... A Vivo progrediu em especial a partir de abril
Continuando no contexto do Estado brasileiro, o quarto capítulo: O PRONERA como Política de acesso à Educação Superior e os Movimentos Sociais no contexto da Globalização da
No período de primeiro de janeiro a 30 de junho de 2011, foram encaminhadas, ao Comitê de Segurança do Paciente da instituição sede do estudo, 218 notificações de
No prazo de 10 dias contada da deliberação, para os condóminos presentes, ou contada da sua comunicação, para os condómino ausentes, pode ser exigida ao administrador a convocação
O segundo Beneficiário será designado pelo Segurado na Proposta de Adesão, podendo ser substituído a qualquer tempo, mediante solicitação formal assinada pelo próprio Segurado, para
3 O presente artigo tem como objetivo expor as melhorias nas praticas e ferramentas de recrutamento e seleção, visando explorar o capital intelectual para
