Importance of automatic threshold for image segmentation for accurate measurement of fine roots of woody plants
Texto
Imagem
Documentos relacionados
2 Para Vico a corrupta natureza do homem ocorre em razão do pecado original, e com essa corrupta natureza: “percebemos com toda claridade que esta, não só nos
60 Cfr. Escobar Fomos, Iván, Manual de Derecho Constitucional, 2a. Abad Yupanqui, Samuel, “El Ombudsman o Defensor del Pueblo en la Constitución peruana de 1993; retos y
Resumo Com início em 2011 a União Europeia atravessou uma crise migratória sem precedentes, desde a II Guerra Mundial, que traz consigo uma série de consequências para a
Nesse contexto, o psicólogo é identificado como profissional que deve estar capacitado em sua formação, conhecer o fenômeno com o qual está lidando, proporcionar
It engages in advance thinking and early politi- cal-strategic planning of possible CSDP responses to crises, incorporating both the civilian and the military
Essas declarações prospectivas podem «acreditar», «planejar» ou «estimar», bem como por outros documento foram obtidas de fontes públicas por nós consideradas é assegurada de
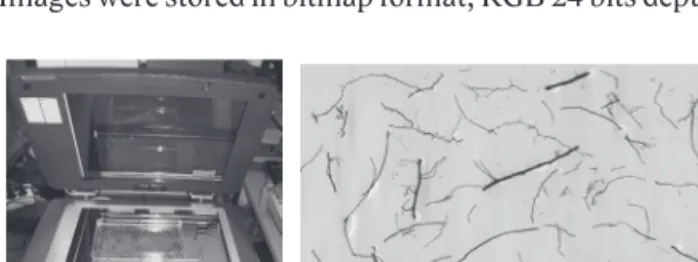
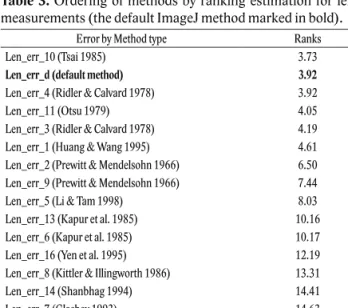
improving the texture segmentation. The effect of image segmentation depends on the color values to a certain extent. Given the complicated light conditions and background of
We also determined the critical strain rate (CSR), understood as the tangent of the inclination angle between the tangent to the crack development curve and the crack development
