Instituto de Matem´
atica
Curso de P´os–Graduac¸˜ao em Matem´aticaDissertac¸˜ao de Mestrado
Gr´
aficos Radiais com Curvatura M´
edia
Constante no Espac
¸o Hiperb´
olico
Adriano Pedreira Cattai
Salvador —Bahia
Gr´
aficos Radiais com Curvatura M´
edia Constante
no Espac
¸o Hiperb´
olico
Disserta¸c˜ao apresentada ao colegiado do curso de P´os-Gradua¸c˜ao em Matem´atica da Universidade Federal da Bahia, como requisito parcial para
obten¸c˜ao do Grau de Mestre em Matem´atica.
Aprovada pela Banca Examinadora abaixo assinada.
Prof. Dr. Jos´e Nelson Bastos Barbosa (Orientador) UFBA
Prof. Dr. Jorge Herbert Soares de Lira UFC
Prof. Dr. Pedro Antonio Hinojosa Vera UFPB
Gr´aficos Radias com Curvatura M´edia Constante no Espa¸co Hiperb´olico/ Adriano Pedreira Cattai; orientador: Jos´e Nelson Bastos Barbosa. — Salva-dor: UFBA, 2006.
79 p.
1. Disserta¸c˜ao (mestrado) – Universidade Federal da Bahia, Departamento de Matem´atica.
Inclui referˆencias bilbiogr´aficas.
1. Matem´atica - Teses. 2. Geometria Riemanniana. I. Cattai, Adriano Pedreira. II. Barbosa, Jos´e Nelson Bastos. III. T´ıtulo.
intrigou a maior parte do ano e achar seu conte´udo mais excitante, mais perfeito, mais maravilhoso do que vocˆe sempre sonhou.
O bebˆe ´e a desculpa perfeita para fazer todas aquelas coisas as quais a vida adulta exigiu que vocˆe renunciasse.
N˜ao h´a por do sol mais bonito, n˜ao h´a maravilha maior do que um bebˆe!”.
Agradecimentos
Sempre `a Deus!
`
A minha amada fam´ılia: meu pai Ailton Teles Cattai, minha m˜ae Maria do Carmo Pedreira Cattai e meu irm˜ao Alessandro Pedreira Cattai, por sempre acreditar em mim e pela for¸ca ao longo de todos estes anos (acredito, que todo agradecimento nunca seria suficiente para recompens´a–los).
Aos meus amigos e parceiros de surf Bruno Melo, Diogo Rodrigues, Joney Santana e Thiago Melo (e seus familiares), por tornarem a minha vida mais gostosa pelo carinho que dedicam.
`
A minha grande companheira, amiga, namorada e esposa,Tharita Veirapor tudo que fez por mim nesse per´ıodo, profissionalmente e moralmente. Sua presen¸ca em minha vida com nossa filha Gabriela foi mais um presente de Deus.
Aos meus orientadores em tempos de inicia¸c˜ao cient´ıfica: Afonso Henriques por todo seu apoio, incentivo, ensinamentos e amizade; eHumberto Jos´e Bortolossi que muito nos ensina com sua amizade, dedica¸c˜ao, disposi¸c˜ao e aten¸c˜ao. Aos professores de gradua¸c˜ao. Aos colegas de gradua¸c˜ao: Antˆonio Oliveira Sim˜ao, Eduardo Palmeira, Fab´ıolo Moraes Amaral, Rosane Funatoe Vin´ıcius Modesto Sert´orio.
Aos colegas de turma: Ab´ılio Souza, Gabriela Goes, Gilcl´ecio Dantas, Josaphat Ri-cardo, Maur´ıcio Porto, Roberto Pastor, Rolando Restany, Rosane Funato, Silvia Costa e Tailson Jeferson, pela companhia e cumplicidade no dia a dia em cada mat´eria e nos intermin´aveis domingos de UFBA. Aos demais mestrandos deste programa que n˜ao citei.
A todos os professores da P´os-Gradua¸c˜ao em Matem´atica desta universidade, em especial ao coordenador Professor Enaldo Silva Vergasta, pela eterna simpatia, sabedoria e exemplo. Aos funcion´arios do Instituto de Matem´atica; `as secret´arias Tˆania Esp´ınola e Dona Zez´e sempre atentas aos nossos pedidos.
Um agradecimento especial ao Professor Jos´e Nelson Bastos Barbosa pela orienta¸c˜ao no desenvolvimento deste trabalho e escolha do tema; pela amizade e toda sua dedica¸c˜ao. Gostaria de agradecer tamb´em aos professores Jorge Herbert S. de Lira ePedro Antonio Hinojosa Vera, os quais compuseram a banca examinadora e verificaram com tanto zelo esta disserta¸c˜ao.
Na tentativa de n˜ao omitir nenhum nome: a todos os amigos de Canavieiras, da EMARC-UR, da UESC, da UFBA; aos colegas de surf, e aos de fora, pelo apoio, compre-ens˜ao e carinho, pelas piadas e pela for¸ca.
Finalmente, `a CAPES pelo apoio financeiro.
Resumo
Provamos a existˆencia de gr´aficos radiais com curvatura m´edia constante no espa¸co hiperb´olico Hn+1 definido sobre dom´ınios em esferas geod´esicas do Hn+1 em que a
cur-vatura m´edia no bordo ´e positiva com respeito a orienta¸c˜ao interna; descrito no artigo Radial Graphs with Constant Mean Curvature in the Hyperbolic Space, do professor da Universidade Federal do Cear´a, Jorge Herbert S. de Lira.
Abstract
The existence is proved of radial graphs with constant mean curvature in the hyper-bolic space Hn+1 defined over domains in geodesic spheres of Hn+1 whose boundary has
positive mean curvature with respect to the inward orientation; described in the article Radial Graphs with Constant Mean Curvature in the Hyperbolic Space, of the teacher of the Federal University of Cear´a, Jorge Herbert S. de Lira.
Sum´
ario
Apresenta¸c˜ao 1
Introdu¸c˜ao 2
1 Preliminares de Geometria Riemanniana 5
1.1 Variedades Diferenci´aveis . . . 5
1.2 Espa¸co Tangente . . . 6
1.2.1 Campo de Vetores . . . 8
1.3 M´etricas Riemannianas . . . 9
1.3.1 A Inversa da M´etrica . . . 10
1.4 Variedades Imersas . . . 10
1.5 Conex˜ao Afim . . . 11
1.6 Geod´esicas e a Aplica¸c˜ao Exponencial . . . 12
1.7 Segunda Forma Fundamental . . . 15
1.7.1 Segunda Forma Fundamental de Hipersuperf´ıcies . . . 16
1.8 Gradiente, Divergente, Laplaciano e Hessiano . . . 18
1.9 O Espa¸co Hiperb´olico . . . 27
1.9.1 Isometrias e o Modelo da Bola . . . 28
1.9.2 Superf´ıcies Umb´ılicas do Hn+1 . . . . 30
2 Equa¸c˜oes Diferencias Parciais e o Princ´ıpio do M´aximo 32 2.1 Continuidade H¨older . . . 32
2.2 Equa¸c˜oes Diferenciais Parciais El´ıpticas . . . 34
2.3 O Princ´ıpio do M´aximo . . . 37
2.3.1 O Princ´ıpio do M´aximo para Operadores Lineares . . . 37
2.3.2 O Princ´ıpio do M´aximo para Operadores Quasilineares . . . 46
2.4 Diferencial de Fr´echet . . . 47
2.5 O M´etodo da Continuidade . . . 50
3 Gr´aficos Radiais em Rn+1 e Hn+1 53 3.1 Gr´aficos Radiais emRn+1 . . . . 53
3.2 Gr´aficos Radiais emHn+1 . . . . 65
4 Prova do Teorema 3.3 69 4.1 Preliminares . . . 69
4.2 A Prova . . . 73
Apresenta¸
c˜
ao
Este trabalho ´e fruto da orienta¸c˜ao do professor Jos´e Nelson Bastos Barbosa, do De-partamento de Matem´atica desta universidade, para disserta¸c˜ao de mestrado. Estudamos a tese de doutorado Existˆencia e Unicidade de Hipersuperf´ıcie com Bordo e Curvatura M´edia Constante em Formas Espaciais ([13]), e o artigo Radial Graphs with Constante Mean Curvature in the Hyperbolic Space Hn+1 ([12]), ambos do professor Jorge Herbert Soares de Lira do Departamento de Matem´atica da Universidade Federal do Cear´a.
Para uma boa compreens˜ao deste trabalho, o leitor deve ter um n´ıvel de conhecimento semelhante ao aluno que cursa o segundo ano de mestrado em matem´atica, especialmente com bons conhecimentos de Geometria Riemanniana e de An´alise em Espa¸cos Euclidianos. Para este prop´osito, sugerimos respectivamente, [17] e [8]. Seria desej´avel ainda, que o leitor tivesse bons conhecimentos de Equa¸c˜oes Diferenciais Parciais (EDP’s) e o Princ´ıpio do M´aximo. Sugerimos para este prop´osito [7]. No entanto, exibimos os resultados mais relevantes para a nossa necessidade no Cap´ıtulo 2.
Introdu¸
c˜
ao
As calotas esferas, s˜ao exemplos cl´assicos de hipersuperf´ıcies com curvatura m´edica constante e com bordo conhecido.
A busca por exemplos n˜ao-esf´ericos de hipersuperf´ıcies mergulhadas com curvatura m´edia constante em espa¸cos de curvatura seccional constante ´e um problema muito co-nhecido. Um jeito corrente de se fazer isto ´e atrav´es da constru¸c˜ao de v´arios tipos de gr´aficos. Neste caso as hipersuperf´ıcies s˜ao descritas n˜ao-parametricamente por fun¸c˜oes definidas sobre um dom´ınio numa hipersuperf´ıcie umb´ılica do ambiente. A condi¸c˜ao que a superf´ıcie tenha curvatura m´edia constante implica que a fun¸c˜ao que descreve o gr´afico seja solu¸c˜ao de uma EDP quasilinear.
Gr´aficos com proje¸c˜ao central injetiva sobre uma Esfera Euclidiana em Rn+1 foram
constru´ıdas por Serrin [16]. Em [3], Treibergs e Wei provam a existˆencia de gr´aficos radiais definidos sobre toda esfera, cuja curvatura m´edia ´e prescrita por uma fun¸c˜ao satisfazendo certas condi¸c˜oes de crescimento.
Recentemente, demonstrou-se v´arios teoremas de existˆencia para gr´aficos com curva-tura m´edia constante no espa¸co hiperb´olico Hn+1 com proje¸c˜ao injetiva sobre dom´ınios
em hipersuperf´ıcies umb´ılicas com curvatura menor ou igual a 1. Por exemplo, J. L. Bar-bosa e R. S. Earp [15] obtiveram gr´aficos com curvatura m´edia constante sobre dom´ınios em hiperplanos geod´esicos. Gr´aficos sobre horoesfera foram constru´ıdos independente-mente por B. Nelli e J. Spruck em [6] e por R. L´opez e S. Montiel em [18]. Tamb´em, L´opez anunciou em [19] a existˆencia de solu¸c˜oes para equa¸c˜oes da curvatura m´edia sobre hipersuperf´ıcies eq¨uidistastes emHn+1.
auto-Introdu¸c˜ao
intersec¸c˜oes. O gr´afico radial de uma fun¸c˜ao χ definida sobre o fecho de um dom´ınio Ω em uma esfera geod´esica S em Hn+1 ´e o conjunto Σ dado por
Σ ={αx(χ(x));x∈Ω},
onde αx ´e a geod´esica minimizante ligando o centro geod´esico de S ao ponto x ∈ Ω.
Suponhamos que Γ =∂Ω ´e uma hipersuperf´ıcie de classeC2,αdeS, para algumα ∈(0,1),
denotemos por HΓ a curvatura m´edia de Γ com respeito ao vetor normal apontando para o interior de Ω, demonstramos o seguinte teorema, provado por Jorge Herbert S. de Lira, em Radial Graphs with Constant Mean Curvature in the Hyperbolic Space. Geometriae Dedicata, 93 (2002), 11–23.
Teorema 3.3(Teorema Principal). Sejam S uma esfera geod´esica de raioρem Hn+1 e Ω
um dom´ınio em S com fecho contido num hemisf´erio aberto de S. Se −infHΓ < H ≤0, ent˜ao existe um ´unico gr´afico radial Σ sobre Ω com curvatura m´edia H e bordo Γ.
A prova deste teorema utilizamos um teorema devido a Serrin (Teorema 3.1) para garantir a existˆencia de um gr´afico radial m´ınimo emHn+1 com bordo Γ. Combinamos as
estimativasa priori para o gradiente (cf. [13], § 2.3) com o Teorema da Fun¸c˜ao Impl´ıcita (Teorema 2.16) e obteremos o resultado acima recorrendo `a teoria cl´assica de Schauder, assim como est´a exposta por D. Gilbarg e N. Trudinger em [7].
O trabalho trata da quest˜ao de encontrarmos solu¸c˜oes ´unicas para o seguinte pro-blema: uma hipersuperf´ıcie deve ser o gr´afico de uma fun¸c˜ao u ∈ C2,α(Ω), onde Ω ´e
um dom´ınio em uma esfera geod´esica S de raio ρ em Hn+1 cujo fecho est´a contido num
hemisf´erio aberto de S, tendo a curvatura m´edia hiperb´olica prescrita por uma fun¸c˜ao, sujeita `a condi¸c˜ao de u se anular na fronteira Γ = ∂Ω, ou seja, equivale a assegurar a existˆencia de uma solu¸c˜ao u∈C2,α(Ω), u <0, para o seguinte problema de Dirichlet:
(
QH(u) = 0 em Ω
u= 0 em Γ ,
em que QH(u) ´e definido em (3.31), p´agina 68.
problemas de Dirichlet. Esta parte foi baseada em [7] e em [20]. Apresentamos ainda a continuidade H¨older e o M´etodo da Continuidade, baseado em [7]. J´a no terceiro cap´ıtulo, apresentamos o problema de constru¸c˜ao de gr´aficos com curvatura m´edia constante em termos da existˆencia de solu¸c˜oes de uma classe espec´ıfica de equa¸c˜oes diferenciais parciais. A partir da no¸c˜ao de gr´afico radial no espa¸co EuclidianoRn+1, deduzimos equa¸c˜oes para gr´aficos radiais sobre esferas geod´esicas no espa¸co hiperb´olico Hn+1. No quarto e ´ultimo
Cap´ıtulo 1
Preliminares de Geometria Riemanniana
Este cap´ıtulo visa dar uma no¸c˜ao de alguns dos principais conceitos e resultados de Geometria Riemanniana, necess´arios para compreens˜ao dos resultados que pretendemos demonstrar.
1.1
Variedades Diferenci´
aveis
Uma variedade diferenci´avel de dimens˜ao n ´e um conjunto M e uma fam´ılia de aplica¸c˜oes biun´ıvocasxα :Uα ⊂Rn →M de abertos Uα deRn em M tais que:
(1) [
α
³
xα(Uα)
´
=M;
(2) Para todo parα,β, comxα(Uα)∩xβ(Uβ) =W 6=∅,os conjuntosx−α1(W) ex−β1(W)
s˜ao abertos em Rn e as aplica¸c˜oes x−1
β ◦xα s˜ao diferenci´aveis;
(3) A fam´ılia {(Uα,xα)}´e m´axima relativamente `as condi¸c˜oes (1) e (2).
O par (Uα,xα) (ou a aplica¸c˜ao xα) com p ∈xα(Uα) ´e chamado uma parametriza¸c˜ao
(ou sistema de coordenadas) deM em p ;xα(Uα) ´e chamada umavizinhan¸ca coordenada
emp. Uma fam´ılia{(Uα,xα)}satisfazendo (1) e (2) ´e chamada umaestrutura diferenci´avel
em M.
Sejam Mm eNnvariedades diferenci´aveis. Uma aplica¸c˜aoϕ :M →N ´ediferenci´avel em p ∈ M se dada uma parametriza¸c˜ao y : V ⊂ Rn → N em ϕ(p) existe uma
parame-triza¸c˜aox:U ⊂Rm →M em ptal que ϕ(x(U))⊂y(V) e a aplica¸c˜ao
y−1◦ϕ◦x:U ⊂Rm →Rn
´e diferenci´avel emx−1(p). ϕ´e diferenci´avel em um aberto deM se ´e diferenci´avel em todos os pontos deste aberto. Decorre da condi¸c˜ao (2) da defini¸c˜ao de variedades diferenci´aveis que a defini¸c˜ao dada independe da escolha das parametriza¸c˜oes.
Em seguida, estenderemos `as variedades diferenci´aveis a no¸c˜ao de vetor tangente.
1.2
Espa¸
co Tangente
Seja Mn uma Variedade Diferenci´avel de dimens˜ao n. Uma aplica¸c˜ao diferenci´avel α: (−ε, ε)→M ´e chamada uma curva diferenci´avel em M.
Suponha que α(0) =p∈M e seja D(M) ={f :M →R ;f ´e diferenci´avel em p}. O
vetor tangente `a curva α em t= 0 ´e a fun¸c˜ao
α′(0) : D(M) → R
f 7→ (f ◦α)′(0)
ou seja, o vetor tangente `a variedade M em p ´e o vetor tangente em t = 0 de alguma curva α : (−ε, ε)→M com α(0) =p. Indicaremos por TPM o conjuntos desses vetores.
Sejam os seguintes caminhos no Rn,λi : (−ε, ε)→ U ⊂Rn tais queλi(t) =q+t·ei,
i= 1, . . . , n, e seja x:U ⊂Rn→Mn uma paramtriza¸c˜ao em p=x(q), q∈ U. As curvas
αi =x◦λi s˜ao chamadas de curvas coordenadas passando em p.
Com base nas defini¸c˜oes acima, temos
(αi)′(0)·f = (f◦αi)′(0) = ((f ◦x)◦λi)′(0)
= X
j
∂(f◦x) ∂xj
(q)·(λij)′(0)
= ∂(f◦x) ∂xi
(q)
e poremos a seguinte nota¸c˜ao:
∂ ∂xi
1.2. Espa¸co Tangente
ou seja,
∂ ∂xi
(p) :D(M)→R , ∂
∂xi
(p)·f = ∂(f ◦x) ∂xi
(q) , q=x−1(p)
Queremos escrever o vetor tangenteα′(0) em termos do sistema de coordenadas deM. Sejam x: U ⊂Rn →M um sistema de coordenadas locais de M em p, α : (−ε, ε)→ M
uma curva diferenci´avel comα((−ε, ε))⊂x(U) e f :M →R uma aplica¸c˜ao diferenci´avel
em p. Fa¸camos o seguinte:
α′(0)·f = (f ◦α)′(0) =¡(f ◦x)◦(x−1◦α)¢′(0) =
n
X
i=1
∂(f ◦x) ∂xi
¡
x−1◦α(0)¢·α′i(0)
=
n
X
i=1
∂(f ◦x) ∂xi
¡
x−1(p)¢·α′i(0)
=
n
X
i=1
α′i(0)·
µ
∂ ∂xi
(p)·f
¶
=
à n
X
i=1
α′i(0)· ∂ ∂xi
(p)
! ·f
portanto, α′(0) =
n
X
i=1
α′i(0) · ∂ ∂xi
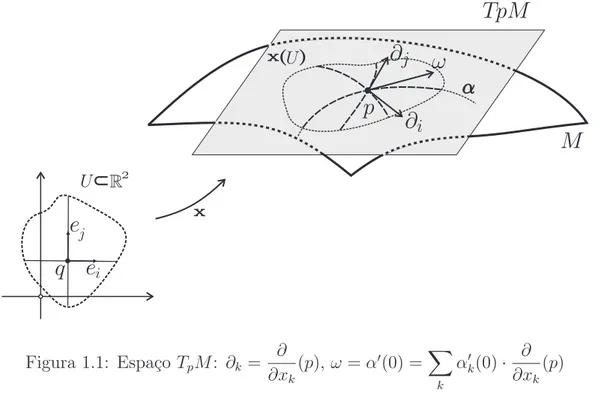
(p), ou seja, o vetor v = α′(0) pode ser expresso na parametriza¸c˜ao x, e mostra que um vetor tangente a uma curva α em p depende apenas das derivadas de α em um sistema de coordenadas. Decorre tamb´em que o conjunto TpM, com as opera¸c˜oes usuais de fun¸c˜oes, forma um Espa¸co Vetorial de dimens˜ao n e
que a escolha de uma parametriza¸c˜ao x : U ⊂ Rn → M determina uma base associada
½
∂ ∂x1
(p), . . . , ∂ ∂xn
(p)
¾
em TpM. Conforme ilustra figura 1.1.
Da no¸c˜ao de espa¸co tangente podemos estender `as variedades diferenci´aveis a no¸c˜ao de diferencial de uma aplica¸c˜ao diferenci´avel.
Proposi¸c˜ao 1.1. Sejam Mm e Nn variedades diferenci´aveis e seja ϕ : M → N uma
aplica¸c˜ao diferenci´avel. Para cada p ∈ M e cada v ∈ TpM, escolha uma curva
dife-renci´avel α : (−ε, ε) → M com α(0) = p, α′(0) = v. Fa¸ca β = ϕ ◦α. A aplica¸c˜ao
dϕp(v) =β′(0) ´e uma aplica¸c˜ao linear que n˜ao depende da escolha de α.
A aplica¸c˜ao linear dϕp dada pela Proposi¸c˜ao 1.1 ´e chamada a diferencial deϕ em p.
Figura 1.1: Espa¸co TpM: ∂k = ∂ ∂xk
(p), ω =α′(0) =X
k
α′k(0)· ∂ ∂xk
(p)
Seja Mn uma variedade diferenci´avel. Diz–se que M ´eorient´avel se M admite uma estrutura diferenci´avel (Uα,xα) tal que, para todo par α, β, com xα(Uα) ∩xβ(Uβ) =
W 6=∅, a diferencial da mudan¸ca de coordenadas x−1
β ◦xα tem determinante da matriz
Jacobiana positivo em cada ponto do seu dom´ınio. Caso contr´ario, diz-se que M ´e n˜ao– orient´avel. Se M ´e orient´avel, a escolha de uma estrutura diferenci´avel ´e chamada uma orienta¸c˜ao deM eM ´e, ent˜ao, ditaorientada. Verifica–se que, seM ´e orient´avel e conexa, ent˜ao existem exatamente duas orienta¸c˜oes distintas em M.
1.2.1
Campo de Vetores
Umcampo de vetores Xe sobre uma variedade diferenci´avel M ´e uma correspondˆencia que a cada ponto p ∈ M associa um vetor X(p)∈ TpM, onde TpM ´e o espa¸co tangente
deM em p. Em termos de aplica¸c˜ao, Xe ´e uma aplica¸c˜ao deM em T M,
e
X : M → T M
p 7→ ³(p),X(p)e ´
onde T M ´e o Fibrado Tangente de M.
Em termos de um sistema local de coordenadas x1, x2, . . . , xn, um campo vetorial
pode ser expresso porX(p) =e Pai(p)∂x∂i(p), ondeai s˜ao fun¸c˜oes definidas na vizinhan¸ca
coordenada, chamadas componentesdeXe com respeito ax1, x2, . . . , xn. Nessas condi¸c˜oes
e
1.3. M´etricas Riemannianas
Outra forma de expressar um campo de vetores, ´e considerando a seguinte aplica¸c˜ao
X : D(M) → F
f 7→ X·f : M → R
p 7→ X(p)·f
onde D(M) ´e o conjunto das fun¸c˜oes diferenci´aveis emM eF o conjunto das fun¸c˜oes em M, ou seja, todo campo de vetores “leva”o conjunto de fun¸c˜oes diferenci´aveis com valores em M no conjunto das fun¸c˜oes em M, definido por (Xf)(p) =X(p)·f.
Seja X(M) o conjunto de todos os campos vetoriais diferenci´aveis sobre M. Ent˜ao, X(M) ´e um espa¸co vetorial real com as opera¸c˜oes naturais de adi¸c˜ao e multiplica¸c˜ao por escalar. Note que se f ´e uma fun¸c˜ao sobre M e X ∈X(M), ent˜ao f X ∈X(M).
1.3
M´
etricas Riemannianas
UmaM´etrica Riemanniana numa Variedade Diferenci´avel M ´e uma correspondˆencia que associa a cada ponto p de M um produto interno h , ip (i.´e., uma forma bilinear
sim´etrica, positiva definida) no espa¸co tangente TpM, que varia diferenciavelmente no
seguinte sentido: Se x:U ⊂R→ M ´e um sistema de coordenadas locais em torno de p,
com x(x1, . . . , xn) = p∈x(U) e
∂ ∂xi
(p) =dxp(0, . . . ,1, . . . ,0), ent˜ao
¿
∂ ∂xi
(p), ∂ ∂xj
(p)
À
p
=gij(x1, . . . , xn)
´e uma fun¸c˜ao diferenci´avel emU.
´
E claro que esta defini¸c˜ao n˜ao depende da escolha do sistema de coordenadas.
Outra maneira de exprimir a diferenciabilidade da M´etrica Riemanniana ´e dizer que para todo par X e Y de campos de vetores diferenci´aveis em uma coordenada em M, a aplica¸c˜ao
hX, Yi: M → R
p 7→ hX(p), Y(p)ip
´e diferenci´avel nessa vizinhan¸ca.
As fun¸c˜oes gij :x(U)→R s˜ao chamadas asExpress˜oes da M´etrica Riemanniana (ou
“os gij da m´etrica”) no sistema de coordenadas x : U ⊂ Rn → M. Uma variedade
Estabeleceremos uma no¸c˜ao de equivalˆencias entre estruturas.
SejamMmeNnvariedades Riemannianas. Um difeomorfismoϕ:M →N ´e chamado uma isometria se:
hu, viMp =hdϕp(u), dϕp(v)iNϕ(p) (1.1)
para todop∈M; u, v ∈TpM.
Se, al´em disso para um aberto U ⊂ M, um difeomorfismo ϕ : U → ϕ(U) ⊂ N satisfazendo (1.1) chama-se uma isometria local.
´
E usual dizer que a variedade Riemanniana M ´e localmente isom´etrica `a variedade N se para todo p ∈ M existe uma vizinhan¸ca V em M e uma isometria local ϕ : V → ϕ(V)⊂N.
1.3.1
A Inversa da M´
etrica
Exibiremos a inversa da m´etrica gij =
¿
∂ ∂xi
, ∂ ∂xj
À
, a qual indicaremos por gij.
Sejam os vetores ei =
X
k
aki
∂ ∂xk
e ej =
X
l
alj
∂ ∂xl
, com o seguinte resultado
δij =hei, eji=
X
k,l
akialjh
∂ ∂xk
, ∂ ∂xli
=X
k,l
(aik)⊤·gkl·alj
e do fato que δij =
(
1 se i=j
0 se i6=j , obtemos a seguinte rela¸c˜ao I = A
⊤ ·G·A e logo
G−1 =A·A⊤, e portanto a express˜ao da inversa da m´etrica em coordenadas ´e
gij =X
k
aik(akj)⊤=
X
k
aikaij. (1.2)
1.4
Variedades Imersas
Sejam Mm e Nn variedades diferenci´aveis. Uma aplica¸c˜ao diferenci´avel ϕ :M →N
´e uma imers˜ao se dϕp : TpM → Tϕ(p) ´e injetiva ∀p ∈ M. Se, al´em disso, ϕ ´e um
1.5. Conex˜ao Afim
Observe que se ϕ : Mm → Nn ´e uma imers˜ao, ent˜ao m ≤ n. A diferen¸ca n−m ´e chamada a codimens˜ao da imers˜aoϕ. E se, a codimens˜ao for igual a 1,ϕ(M) ´e chamada dehipersuperf´ıcie.
Suponha ϕ : Mn → Nn+k uma imers˜ao, Nn+k uma variedade Riemanniana e Mn
uma variedade diderenci´avel. Defina
hu, viMp :=hdϕp(u), dϕp(v)iNϕ(p)
como sendo a m´etrica em M. Essa m´etrica ´e chamada de m´etrica induzida por ϕ, e ϕ ´e uma imers˜ao isom´etrica.
1.5
Conex˜
ao Afim
Uma conex˜ao afim ∇em uma variedade diferenci´avel M ´e uma aplica¸c˜ao:
∇:X(M)×X(M)→X(M)
que satisfaz as seguintes propriedades, onde X, Y, Z ∈X(M)e f, g ∈ D(M):
(1) ∇f X+gYZ =f∇XZ+g∇YZ;
(2) ∇X(Y +Z) = ∇XY +∇XZ;
(3) ∇X(f Y) = f∇XY +Xf Y.
Seja M uma variedade diferenci´avel com uma conex˜ao afim ∇ e uma m´etrica Rie-manniana h ,ip. A conex˜ao∇ ´e dita compat´ıvel com a m´etrica h ,ip se
XhY, Zi=h∇XY, Zi+hY,∇XZi, X, Y, Z ∈X(M)
Uma conex˜ao afim ∇em uma variedade diferenci´avel M ´e dita sim´etrica se
∇XY − ∇YX = [X, Y] X, Y ∈X(M)
1.6
Geod´
esicas e a Aplica¸
c˜
ao Exponencial
Nesta se¸c˜ao introduziremos a no¸c˜ao de geod´esica como uma curva cuja acelera¸c˜ao ´e nula. Geod´esica ´e um dos conceitos fundamentais da Geometria Riemanniana, pelo fato de minimizarem comprimento de arco para pontos “suficientemente pr´oximo”, e al´em disso, se uma curva minimiza o comprimento de arco entre dois quaisquer de seus pontos, ela ´e uma geod´esica.
Uma curva parametrizadaγ :I →M ´e umageod´esica emt0 ∈I se D dt
dγ
dt = 0 no ponto
t0. Se γ ´e geod´esica em t, para todot ∈I, dizemos que γ ´e uma geod´esica. Se [a, b]⊂I e γ :I → M ´e uma geod´esica, a restri¸c˜ao de γ a [a, b] ´e chamada (segmento de)geod´esica ligando γ(a) a γ(b).
´
E comum, por abuso de linguagem, dizermos que geod´esica ´e a imagem γ(I) de uma geod´esica γ. Se γ ´e uma geod´esica, ent˜ao
d dt
¿
dγ dt,
dγ dt
À
= 2
¿
D dt
dγ dt,
dγ dt
À
= 0,
isto ´e, o comprimento do vetor dγdt ´e constante. Supondo que¯¯dγdt¯¯=c6= 0, o comprimento de arcos deγ, a partir de uma origem fixa, digamos t=t0, ´e ent˜ao dado por
s(t) =
Z t
t0
¯ ¯ ¯ ¯
dγ dt
¯ ¯ ¯
¯dt=c(t−t0).
Portanto, o parˆametro de uma geod´esica ´e proporcional ao comprimento de arco. Quando o parˆametro ´e o pr´oprio comprimento de arco, isto ´e, c = 1, diremos que a geod´esica γ est´a normalizada.
´
E poss´ıvel determinar as equa¸c˜oes locais satisfeitas por uma geod´esica γ em um sistema de coordenadas (U,x) em torno de γ(t0), conforme exposto em [17], e prova-se que para cada ponto p ∈ M e um vetor v ∈ TpM em p, existe uma ´unica geod´esica
passando em pcom dire¸c˜ao v. Temos assim o seguinte lema.
Lema 1.2 (Lema 2.3, p. 63, [17]). Existe um ´unico campo G em T M = {(q, v);q ∈
M, v ∈TpM} cujas trajet´orias s˜ao da format→(γ(t), γ′(t)), onde γ ´e uma geod´esica em
M.
1.6. Geod´esicas e a Aplica¸c˜ao Exponencial
Proposi¸c˜ao 1.3 (Proposi¸c˜ao 2.5, p. 63, [17]). Dado p ∈ M, existem um aberto
V ⊂ M, p ∈ V, n´umeros δ > 0 e ε1 > 0 e uma aplica¸c˜ao C∞ γ : (−δ, δ)× U → M,
U = {(q, v);q ∈ V, v ∈ TqM,|v| < ε1}, tais que a curva t → γ(t, q, v), t ∈ (−δ, δ), ´e a
´
unica geod´esica de M que nos instante t = 0 passa por q com velocidade v, para cada
q∈V e cada v ∈TpM com |v|< ε1.
Esta ´ultima proposi¸c˜ao afirma que se |v| < ε1, a geod´esica γ(t, q, v) existe em um intervalo (−δ, δ) e ´e ´unica. Em verdade, ´e poss´ıvel aumentar a velocidade deuma geod´esica diminuindo o seu intervalo de defini¸c˜ao, ou vice-versa. Isto decorre do seguinte lema.
Lema 1.4 (Lema 2.6, p. 64, [17]). Se a geod´esica γ(t, q, v) est´a definida no intervalo
(−δ, δ), ent˜ao a geod´esica γ(t, q, av), ∈ R, a > 0, est´a definida no intervalo ¡−δ
a, δ a
¢
e
γ(t, q, av) =γ(at, q, v).
Uma aplica¸c˜ao muito ´util para nossos prop´ositos, ´e a aplica¸c˜ao exponencial, que definiremos agora. Seja V uma vizinhan¸ca de p ∈ M e U = {(q, w) ∈ T M, q ∈ V, w ∈ TqM,|w|< ε} um aberto. Ent˜ao a aplica¸c˜ao exp :U →M dada por
exp(q, v) = γ(1, q, v) =γ
µ
|v|, q, v
|v|
¶
, (q, v)∈ U,
´e chamadaaplica¸c˜ao exponencial em U.
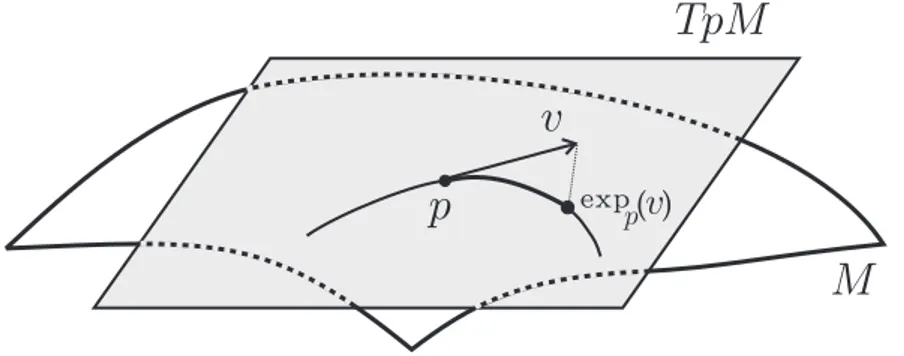
Geometricamente, expq(v) ´e o ponto de M obtido percorrendo um comprimento igual a |v|, a partir deq, sobre a geod´esica que passa porq com velocidade igual a v
|v|.
Figura 1.2: Aplica¸c˜ao Exponencial expp
Proposi¸c˜ao 1.5 (Proposi¸c˜ao 2.9, p. 65, [17]). Dado q ∈ M, existe um ε > 0 tal que
Se a aplica¸c˜ao exponencial expp ´e um difeomorfismo em uma vizinhan¸ca V da origem em TpM, exppV = U ´e chamada uma vizinhan¸ca normal de p. Se Bε(0) ´e tal que
Bε(0)⊂V, chamamos exppBε(0) =Bε(p) a bola normal (ou geod´esica) de centrope raio
ε. A fronteira de uma bola normal ´e um hipersuperf´ıcie em M ortogonal `as geod´esicas que partem de p, denotamos porSε(p) e denominamos por esfera normal(ou geod´esica).
As geod´esicas em Bε(p) que partem de ps˜ao chamadas geod´esicas radiais.
Figura 1.3: Esfera geod´esica: exppBε(0) =Bε(p)
Um segmento geod´esico γ : [a, b] → M ´e chamado minimizante se ℓ(γ) ≤ ℓ(c), em que ℓ(.) indica o comprimento de uma curva e c ´e qualquer curva diferenci´avel por partes ligandoγ(a) aγ(b). A seguinte proposi¸c˜ao assegura que as geod´esicas minimizam, localmente, o comprimento de arco.
Proposi¸c˜ao 1.6 (Proposi¸c˜ao 3.6, p. 71, [17]). Sejam p∈M, U uma vizinhan¸ca normal
de p, B ⊂U uma bola normal de centro p. Seja γ : [0,1]→B um segmento de geod´esica
com γ(0) = p. Se c: [0,1]→M ´e qualquer curva diferenci´avel por partes ligando γ(0) a
γ(1) ent˜ao ℓ(γ)≤ℓ(c) e se a igualdade vale ent˜ao γ([0,1]) =c([0,1]).
Cabe observar que a proposi¸c˜ao acima n˜ao ´e global, pois se considerarmos as geod´esicas de uma esfera que partem de um ponto p n˜ao s˜ao minizantes depois que passam pelo ant´ıpoda de p. Por outro lado, se uma curva c diferenci´avel por partes ´e minimizante, ent˜ao c´e uma geod´esica. Como afirma o seguinte corol´ario.
Corol´ario 1.7 (Corol´ario 3.9, p.73, [17]). Se uma curva diferenci´avel por partes γ :
[a, b] →M, com parˆametro proporcional ao comprimento de arco, tem comprimento
me-nor ou igual ao comprimento de qualquer outra curva diferenci´avel por partes ligandoγ(a)
1.7. Segunda Forma Fundamental
1.7
Segunda Forma Fundamental
Seja ϕ : Mn → Mn+k uma imers˜ao isom´etrica. Para simplificar a nota¸c˜ao, identifi-caremos, para cada p∈ M, cada vetor v ∈ T pM com dϕp(v) ∈ Tϕ(p)M e ϕ(W) com W,
onde W ⊂ M ´e uma vizinhan¸ca de p. Ent˜ao a m´etrica de M decomp˜oe TpM na soma
direta:
TpM =TpM ⊕(TpM)⊥,
onde (TpM)⊥ ´e o complemento ortogonal de TpM em TpM.
Se X, Y s˜ao campos locais de vetores em M, e X, Y s˜ao suas extens˜oes locais a M , ent˜ao a conex˜ao Riemanniana de M ´e dada por ∇XY = (∇XY)T, onde ∇ ´e a conex˜ao
Riemanniana de M.
Queremos definir a segunda forma fundamental da imers˜aoϕ. Para tanto, definiremos B(X, Y) = ∇XY − ∇XY como um campo local em M normal a M , onde X e Y
s˜ao campos locais em M. Segue que B(X, Y) n˜ao depende das extens˜oes de X, Y, e a aplica¸c˜aoB :X(W)×X(W)→X(W)⊥´e bilinear e sim´etrica, ondeX(W)⊥s˜ao os campos diferenci´aveis em M de vetores normais a M.
Estamos aptos a definir a segunda forma fundamental. Sejap∈M eη∈(TpM)⊥. A
aplica¸c˜ao Hη :TpM ×TpM →R dada por
Hη(u, v) =hB(u, v), ηi, ∀u, v ∈TpM
´e uma forma bilinear sim´etrica. E portanto temos a seguinte defini¸c˜ao.
A forma quadr´atica IIη definida emTpM por IIη(v) =Hη(v, v) ´e chamada a segunda
forma fundamental de ϕ em p segundo o vetor normalη.
Denotaremos por Sη : TpM → TpM a aplica¸c˜ao linear auto–adjunta associada `a
segunda forma fundamental de ϕ, isto ´e,
hSη(u), vi=Hη(u, v) =hB(u, v), ηi, ∀ u, v ∈TpM.
E essa aplica¸c˜ao linear, em termos da derivada covariante, pode ser expressa como
Sη(v) =−(∇vN)T,
onde N ´e uma extens˜ao local de η normal a M.
K(u, v) e K(u, v) as curvaturas seccionais de M e M, respectivamente, no plano gerado por u ev.
Teorema 1.8 (Gauss). Sejam p∈M e u, v vetores ortonormais de TpM. Ent˜ao
K(u, v)−K(u, v) =hB(u, u), B(v, v)i − |B(u, v)|2.
Uma imers˜aoϕ :M →M ´egeod´esica em p∈M se para todoη ∈(TpM)⊥ a segunda
forma fundamental Hη ´e identicamente nula emp. A imers˜aoϕ ´etotalmente geod´esica se
ela ´e geod´esica para todo p∈M.
Uma imers˜ao ϕ:M →M ´em´ınima se para todo p∈M e todo η ∈(TpM)⊥ tem–se
que o tra¸co de Sη = 0.
Escolhendo um referencial ortonormal ξ1, . . . , ξk de vetores em (TpM)⊥, ovetor
cur-vatura m´edia deϕ em p´e definido por
H = 1 n
X
k
(trSξk)ξk
que n˜ao depende do referencial ξk escolhido. E, ´e claro que ϕ ´e m´ınima se, e somente se,
H(p) = 0, para todop∈M.
1.7.1
Segunda Forma Fundamental de Hipersuperf´
ıcies
Consideremos o caso particular em que a imers˜ao ´e uma hipersuperf´ıcie, isto ´e, ϕ : Mn → Mn+1. Seja p ∈M e η ∈(TpM)⊥, |η| = 1. Como Sη : TpM → TpM ´e sim´etrica,
existe uma base ortonormal de vetores pr´oprios{ξ1, . . . , ξn}deTpM com valores pr´oprios
λi, . . . , λn, i.´e., Sη(ξ1) = λiξi, 1 ≤ i ≤ n. Se M e M s˜ao orient´aveis e est˜ao orientas,
ent˜ao o vetor η fica univocamente determinado se exigirmos que sendo {ξ1, . . . , ξn} uma
base na orienta¸c˜ao de M e {ξ1, . . . , ξn, η} seja uma base na orienta¸c˜ao de M. Neste caso,
denominamos, osξi dire¸c˜oes principais e osλi =ki curvaturas principais deϕ e portanto,
a curvatura de Gauss–Kronecker de ϕ ´e det(Sη) = λ1. . . λn, e a curvatura m´edia de ϕ ´e
1
ntr(Sη) =
1
n(λ1+. . .+λn).
Um caso importante ocorre quando M = Rn+1. Neste caso, podemos expressar a curvatura m´edia em coordenadas. Inicialmente, seja N uma extens˜ao local deη, unit´aria e normal a M. Sejam α(t) = (a1(t), . . . , an(t)) e β(t) = (b1(t), . . . , bn(t)) duas curvas
1.7. Segunda Forma Fundamental
Escrevendo u=X
i
a′i∂X ∂xi
e v =X
j
b′j∂X ∂xj
temos que
hB(u, v), Ni = hSη·u, vi
= − hdN·u, vi
= − *
dN·X
i
a′i∂X ∂xi
,X
j
b′j∂X ∂xj + = − * X i
a′i dN·∂X ∂xi
,X
j
b′j∂X ∂xj
+
= −X
i,j
a′ib′j
¿
dN·∂X
∂xi ,∂X ∂xj À = X i,j
a′ib′j
¿
N, ∂ 2X ∂xi∂xj
À
onde a ´ultima igualdade vem do fato que
∂ ∂xi ¿ N,∂X ∂xj À = ¿
dN·∂X ∂xi ,∂X ∂xj À + ¿ N, ∂ 2X ∂xi∂xj
À
= 0.
Portanto,
bkl:=
¿ B µ ∂X ∂xk ,∂X ∂xl ¶ , N À = ¿ N, ∂ 2X ∂xk∂xl
À
,
e ent˜ao a curvatura m´edia pode ser escrita
H = 1 n
X
i,j
gijbij (1.3)
onde gij ´e a inversa da m´etrica gij =
¿ ∂ ∂xi , ∂ ∂xj À
1.8
Gradiente, Divergente, Laplaciano e Hessiano
Definiremos nesta se¸c˜ao, o gradiente, a divergˆencia, o laplaciano e o hessiano em uma variedade Riemanniana, determinando para cada um destes suas express˜oes em rela¸c˜ao a um referencial ortonormal e a um sistema de coordenadas. Destacaremos alguns resultados b´asicos que utilizaremos ao longo do nosso trabalho, tamb´em veremos a rela¸c˜ao que existe entre os laplacianos de duas variedades conformes.
Dada uma fun¸c˜ao f ∈ D(M), o gradiente def ´e o campo de vetores
gradf :M → T M
p 7→ (p,gradf(p)),
definido por
hgradf, Xi=X(f) = df ·X, ∀X ∈X(M).
Dado X ∈X(M), o divergentede X ´e a fun¸c˜ao divX :M →R,definida por
divX(p) = tr¡Y(p)7→(∇YX)(p)
¢
,
onde tr representa o tra¸co da aplica¸c˜ao linear Y(p)7→(∇YX)(p).
O operador linear ∆ : D(M)→ D(M) definido por:
∆f = div(gradf), ∀ f ∈ D(M)
´e chamado o operador Laplaciano de M.
Calcularemos, primeiramente, as express˜oes de gradf, divX e ∆f em rela¸c˜ao a um referencial ortogonal (ξ1, . . . , ξn) definido em um aberto de M. Observemos no entanto
que as express˜oes do gradiente, da divergˆencia e do laplaciano independem do referencial escolhido, pois o gradiente em cara ponto p ∈ M ´e o vetor que representa o funcional linear dfp e a divergˆencia ´e o tra¸co de uma aplica¸c˜ao linear.
Como, por defini¸c˜ao,
hgradf, ξii=ξif, i= 1, . . . , m,
a express˜ao de gradf ´e
gradf =
m
X
i=1
¡
ξif
¢
1.8. Gradiente, Divergente, Laplaciano e Hessiano
De acordo com a defini¸c˜ao da divergˆencia de um campo X, temos
divX =
m
X
i=1
D
∇ξiX, ξi
E
,
e escrevendo X =
m
X
j=1
Xjξj segue que
h∇ξiX, ξii =
* ∇ξi
à m
X
j=1 Xjξj
!
, ξi
+ = m X j=1 D ∇ξi
¡
Xjξj
¢
, ξi
E = m X j=1 D¡
ξiXj
¢
ξj +Xj∇ξiξj, ξi
E
= ξiXi+ m
X
j=1 Xj
D
∇ξiξj, ξi
E
= ξiXi− m
X
j=1 Xj
D
∇ξiξi, ξj
E
= ξiXi−
D
∇ξiξi, X
E
.
Conclu´ımos ent˜ao que
divX =
m
X
i=1
n
ξiXi −
∇ξiξi, X
®o
. (1.5)
Para o c´alculo do laplaciano, combinando (1.4) e (1.5) para obter
δf = div(gradf) =
m X i=1 n ξi ¡
ξif
¢
−∇ξiξi,gradf
®o , isto ´e, δf = m X i=1 n ξi ¡
ξif
¢
−¡∇ξiξi
¢
fo. (1.6)
Em particular, de {ξ1, . . . , ξm} ´e um referencial geod´esico em p, ou seja, se al´em da
ortogonalidade temos ¡∇ξiξj
¢
(p) = 0, i, j = 1, . . . , m,ent˜ao as express˜oes da divergˆencia e do laplaciano no ponto p s˜ao
divX(p) =
m
X
i=1
¡
ξiXi
¢
(p) e ∆f(p) =
m
X
i=1 ξi
¡
ξif
¢
(p).
Seja x :U → M um sistema de coordenadas locais, vamos calcular as express˜oes de gradf, divX e δf nesse sistema de coordenadas. Denotando ∂i =
∂ ∂xi
, seja {∂1, . . . , ∂m}
a base associada a esse sistema e considere a matrizG=¡gij
¢
definida por gij =
∂i, ∂j
®
i, j = 1, . . . , m. Denotemos por g = detG, G−1 = ¡gij¢ o determinante e a inversa de G, respectivamente.
Para o gradiente, escrevendo
gradf =
m
X
i=1 αi∂i,
temos que
∂f ∂xi
=hαi∂i∂ji= m
X
i=1 αigij,
e pondo A =¡αi
¢
m×1 e F =
µ
∂f ∂xi
¶
m×1
, obtemos GA = F, ou seja, A = G−1F. Segue que
αi = m
X
j=1 gij ∂f
∂xi
e conseq¨uentemente,
gradf =
m
X
i=1
( m
X
j=1 gij ∂f
∂xi
)
∂i. (1.7)
Calculemos a express˜ao da divergˆencia. Se {ξ1, . . . , ξm} ´e um referencial ortogonal
definido em x(U), escrevendo
ξi = m
X
k=1
eki∂k, i= 1, . . . , m,
temos
δij =
ξi, ξj
®
=
m
X
k,l=1
ekleljgkl, i= 1, . . . , m.
Pondo E = (eij), segue que ETGE =I. Portanto, podemos tamb´em escrever
δij = m
X
i,j=1
gikeklejl, i, j = 1, . . . , m. (1.8)
Para um campo X ∈X(M) dado por
X =
m
X
1.8. Gradiente, Divergente, Laplaciano e Hessiano
tem-se que
divX = X
k
∇ξkX, ξk
® =X k * ∇X i
eik∂i
X
j
aj∂j,
X
l
elk∂i
+
= X
i,j,k,l
elkeikh∇∂iaj∂j, ∂li
= X
i,j,k,l
elkeik
½¿
∂aj
∂xi
∂j, ∂i
À
+aj
∇∂i∂j, ∂l
®¾
= X
i,j,k,l
(
gjlelkeik
∂aj
∂xi
+X
r
³
grlelkeikajΓrij
´)
,
em que Γr
ij, i, j, r= 1, . . . , m, s˜ao os. utilizando s´ımbolos de Christoffel da conex˜ao ∇ no
sistema de coordenadas x. Utilizando (1.8), obtemos
divX =X
i ( ∂ai ∂xi +X j
ajΓiij
)
, (1.9)
e como
Γkij = 1 2 X l glk ½ ∂gjl ∂xi
+∂gli ∂xj −
∂ij ∂xl ¾ , segue que X i,j
Γiij =
1 2
X
i,j,l
ajgli
½
∂gjl
∂xi
+ ∂gli ∂xj −
∂gij ∂xl ¾ = 1 2 X i,j,l ½
ajgli
∂gjl
∂xi
+aiglj
∂glj
∂xi −
ajgil
∂glj ∂xi ¾ = 1 2 X i,j,l
ajgjl
∂glj
∂xi
.
Conseq¨uentemente,
divX = X
i
(
∂ai
∂xi
+ 1 2ai
X
j,l
gjl glj ∂xi ) =X i ½ ∂ai ∂aj +1 2aitr
µ
G−1∂G ∂xi ¶¾ = X i ½ ∂ai ∂xi + 1 2ai
1 g ∂g ∂xi ¾ =X i ½ ∂ai ∂xi
+ √1 g
∂ ∂xi
(√g)
¾
,
em que ∂G ∂xi
denota a matriz obtida deGderivando-se cada elemento em rela¸c˜ao `a i-´esima
coordenada, e onde usamos o fato que ∂g ∂xi
=gtr
µ
G−1∂G ∂xi
¶
(veja [So], p. 56). Logo, a
express˜ao da divergˆencia de X ´e
divX = √1 g
X
i
∂i
¡
ai√g
¢
Finalmente, a partir de (1.7) e (1.10) obtemos o laplaciano como
∆f = √1 g
X
i,j
∂i
µ
gij√g ∂f ∂xj
¶
. (1.11)
Conv´em mencionar agora algumas propriedades, que usando as defini¸c˜oes de gradi-ente, divergente e laplaciano, por um c´alculo direto podemos mostrar que
grad(f g) = fgradh+hgradf
div(f X) = fdivX+hgradf, Xi (1.12)
∆(f g) = f∆h+h∆f+ 2hgradf,gradhi, (1.13)
para quaisquer f, g ∈ D(M). Se M ´e compacta e orient´avel, com bordo ∂M, para X ∈X(M) tem-se que
Z
M
(divX)dV =
Z
∂Mh
X, νidA,
em que dV e dA s˜ao os elementos de volume deM e do bordo ∂M, respectivamente, e ν ´e o campo unit´ario normal exterior em∂M Este resultado ´e conhecido como Teorema da Divergˆencia ([Sp], p. 192). Decorrem deste teorema e de (1.12) as chamadas F´ormulas
de Green Z
M
©
f∆g+hgradf,gradgiªdV =
Z
∂M
fhgradg, νidA (1.14)
e Z
M
©
f∆g−g∆fªdV =
Z
∂M
©
fhgradg, νi −ghgradf, νiªdA, (1.15)
para f, g∈ D(M).
Introduziremos o conceito de variedades conformes. Seja ϕ : M → N um difeomor-fismo, em que N ´e uma variedade Riemanniana. Denotaremos porh ,i, ∇e ∆ a m´etrica em N, a conex˜ao Riemanniana e o laplaciano relativos a esta m´etrica, respectivamente. Suponha que existe uma fun¸c˜ao µ∈ D(M) que satisfa¸ca, para todo p∈M e todo par de vetores v, w∈TpM, µ(p)6= 0 e
hdϕp·v, dϕp·wi=µ2(p)hv, wi.
1.8. Gradiente, Divergente, Laplaciano e Hessiano
Observemos que dados X ∈ X(M) e f ∈ D(M), pondo g = f ◦ϕ−1, temos para q=ϕ(p),
¡
(dϕ·X)g¢(q) = dgq·
¡
dϕp·X(p)
¢
=¡dfp◦dϕ−1◦dϕq
¢¡
X(p)¢
= dfp·
¡
X(p)¢=¡Xf¢(p)
= ¡Xf ◦ϕ−1¢(q),
isto ´e,
¡
dϕ·X¢g =Xf ◦ϕ−1. (1.16)
O lema a seguir nos mostra como se relacionam as conex˜oes de duas variedades conformes, neste caso as deM e N.
Lema 1.9. Se X, Y ∈X(M), ent˜ao
∇dϕ·X(dϕ·Y) =dϕ·
½
∇XY +
1 2µ
−2³X¡µ2¢Y +Y ¡µ2¢X
− hX, Yigrad¡µ2¢ ´
¾
(1.17)
Demonstra¸c˜ao. Seja S(X, Y) o campo que satisfaz
∇dϕ·X(dϕ·Y) = dϕ·
³
∇XY +S(X, Y)
´
, (1.18)
para quaisquer X, Y, Z ∈X(M). Utilizando (1.16) obtemos
¡
dϕ·X¢hdϕ·Y, dϕ·Zi = ¡dϕ·X¢ ¡µ2hY, Zi ◦ϕ−1¢ = X¡µ2hY, Zi¢◦ϕ−1,
ou seja,
¡
dϕ·X¢hdϕ·Y, dϕ·Zi=nX(µ2)hY, Zi+µ2XhY, Zio◦ϕ−1. (1.19)
Temos tamb´em que
h∇dϕ·X(dϕ·Y), dϕ·Zi = hdϕ·
¡
∇XY +S(X, Y)
¢
, dϕ·Zi
= µ2h∇XY +S(X, Y), Zi ◦ϕ−1
= nµ2h∇XY, Zi+µ2hS(X, Y), Zi
o
◦ϕ−1. (1.20)
Permutando-se Y eZ em (1.20) obtemos
hdϕ·Y,∇dϕ·X(dϕ·Z)i=
n
µ2hY,∇XZi+µ2hY, S(X, Z)i
o
Como
¡
dϕ·X¢hdϕ·Y, dϕ·Zi=h∇dϕ·X(dϕ·Y), dϕ·Zi+hdϕ·Y,∇dϕ·X(dϕ·Z)i,
decorre de (1.19), (1.20) e (1.21) que (1.18) equivale a
X¡µ2¢hY, Zi=µ2©hS(X, Y), Zi+hY, S(X, Z)iª. (1.22)
Por outro lado, S(X, Y) dado por
S(X, Y) = 1 2µ
−2nX¡µ2¢Y +Y ¡µ2¢X− hX, Yigrad¡µ2¢ o
obviamente verifica
hS(X, Y), Zi= 1 2µ
−2nX¡µ2¢
hY, Zi+Y ¡µ2¢hX, Zi −Z¡µ2¢hX, Yio
e, conseq¨uentemente, satisfaz a equa¸c˜ao (1.22), o que conclui a demonstra¸c˜ao do lema. ¤
A proposi¸c˜ao seguinte nos mostra a rela¸c˜ao que existe entre os laplacianos das varie-dades conformesM e N.
Proposi¸c˜ao 1.10. Sejam f ∈ D(M) e g ∈ D(N) tais que g =f ◦ϕ−1. Ent˜ao
∆g(q) =
½
1 µ2∆f+
m−2
2µ4 grad(µ 2)f
¾
(p), (1.23)
em que q=ϕ(p), p∈M.
Demonstra¸c˜ao. Seja {ξ1, . . . , ξm} um referencial ortogonal definido num aberto
V ⊂ M. Temos que que {ηζ1, . . . , ηζm} ´e um referencial ortogonal definido no aberto
W =ϕ(V), em que η = 1 µ ◦ϕ
−1 e ζ
i = dϕ·ξi, i = 1, . . . , m. Assim, de acordo com 1.6,
em W, temos
∆g = m X i=1 n ηζi ¡
ηζig
¢
−¡∆ηζi(ηζ1)g
¢ o
. (1.24)
Utilizando (1.16), vem que
ζig =
¡
dϕ·ξi
¢
g =¡ξif
¢
◦ϕ−1, ζi
¡
ζig
¢
= (dϕ·ξi)
³
(ξif)◦ϕ−1
´
,
ζiξ = (dϕ·ξi)η =
½ ξi µ 1 µ ¶¾ ◦ϕ−1.
Calculemos cada parcela da soma em (1.24). Temos que
ηζi(ηζig) = η(ζiη)(ζig) +η2ζi(ζig) =
½ 1 µ µ ξi µ 1 µ ¶¶
(ηif) +
1 µ2ηi(ηi)
1.8. Gradiente, Divergente, Laplaciano e Hessiano
e
³
∆ηζi(ηζi)
´
g =η(ζiη)(ζig) +η2
³
(∆ζiζi)g
´
.
Para desenvolvermos esta ´ultima igualdade, vamos determinar a express˜ao de∇ζiζi. Pelo Lema 1.9 tem-se que
∇ζiζi =dϕ·
½
∇ξiξi+ 1 2µ2
³
2ξi
¡
µ2¢ξi −grad
¡
µ2¢ ´
¾
,
e decorre de (1.16) que
³ ∇ζiζi
´
g =½³∇ξiξi
´
f + 1 2µ2
³
2ξi
¡
µ2¢ξi−grad
¡
µ2¢ ´f
¾
◦ϕ−1.
Portanto,
³ ∇ηζi
¡ ηζi ¢´ g = ½ 1 µ µ ξi µ 1 µ ¶¶ ³
ξif
´
+ 1 µ2
·³ ∇xiiξi
´
f + 1 2µ2
³
2ξi
¡
µ2¢ξi−grad
¡
µ2¢ ´f
¸¾ ◦ϕ−1.
Conseq¨uentemente, o termo do somat´orio em (1.24) ´e
ηζi
¡
ηζig
¢
− ∇ηζi(ηζi) =
½
1 µ2
³
ξi(ξif)−(∇ξiξi)f
´ − 1 2µ4 ³ 2ξi ¡
µ2¢ξi−grad
¡
µ2¢ ´f
¾
◦ϕ−1. Logo, ∆g = ( 1 µ2 m X i=1 ³
ξi(ξif)−(∇ξiξi)f
´ + 1 2µ4 Ã m X i=1
grad¡µ2¢−2
m
X
i=1 ξi
¡
µ2¢ξi
!
f
) ◦ϕ−1
=
½
1 µ2∆f +
1 2µ4grad
¡
µ2¢f
¾
◦ϕ−1,
e em q=ϕ(p) temos (1.23). ¤
Para finalizarmos a se¸c˜ao, definiremos o Hessiano de uma fun¸c˜ao f ∈X(M).
Sejam f ∈ X(M) e p ∈ M. Defina o hessiano de f no ponto p como a aplica¸c˜ao bilinear, Hessf :TpM ×TpM →R dada por:
Hessf(X, Y) =∇X(gradf), Y
®
Observando que
[X, Y](f) = XY(f)−Y X(f) = (∇XY − ∇YX)(f),
temos que Hessf(X, Y) = Hessf(Y, X), em queX, Y ∈X(M), isto ´e, Hessf ´e uma forma
bilinear sim´etrica. Se (x1, . . . , xn) ´e um sistema de coordenadas locais em M e ∂i =
∂ ∂xi
ent˜ao:
Hessf(∂i, ∂j) =∂i∂jf−(∇∂i∂j)(f).
Como ∇∂i∂j =
X
k
Γkij∂k podemos escrever a express˜ao acima da seguinte maneira:
Hessf(∂i, ∂j) =
³
∂i∂j−
X
k
Γkij∂k
´
(f).
Denotaremos tamb´em por Hessf o operador linear auto–adjunto associado ao hessiano de f.
As igualdades abaixo decorrem das propriedades do gradiente e divergente j´a vistas anteriormente:
∆(f g) = f∆g+g∆f+ 2h∇f,∇gi); 1
2∆(f
2) = f∆f+
1.9. O Espa¸co Hiperb´olico
1.9
O Espa¸
co Hiperb´
olico
Os espa¸cos de curvatura seccional constante podem ser agrupadas em trˆes tipos: os de curvaturas seccional positiva, os de negativa e os que possuem curvatura seccional nula. Se multiplicarmos uma m´etrica Riemanniana por uma constante positiva c, ent˜ao a sua curvatura seccional ´e multiplicada pelo inverso dec. Portanto, podemos supor que a curvatura seccional constante de uma variedade ´e 1, 0 ou −1.
O espa¸co euclidiano Rn+1 tem curvatura seccional nula, na esfera Sn esse valor ´e 1;
portanto para estudarmos as variedades com curvatura seccional constante devemos obter uma com curvatura −1. E esse ´e o caso do espa¸co hiperb´olico.
Definimos como Espa¸co Hiperb´olico de dimens˜ao n+ 1, o semi-espa¸co do Rn+1 dado
por
Hn+1 :={(x0, . . . , xn)∈Rn+1;xn >0}
munido da m´etrica
ds2 = dx 2
0+· · ·+dx2n
x2
n
= 1 x2
n n
X
i=0
dx2i. (1.25)
Este espa¸co ´e simplesmente conexo e ´e completo. Antes de justificarmos estes fatos, vejamos o seguinte exerc´ıcio.
Consideremos H2 o plano hiperb´olico, ou seja, H2 ={(x, y)∈ R2;y >0}.
Mostrare-mos que o segmento γ : [a, b] →H2, a > 0, do eixo dos y, dado γ(t) = (0, t) ´e a imagem
de uma geod´esica. De fato, para qualquer arco c: [a, b]→H2 dado por c(t) = (x(t), y(t))
com c(a) = (0, a) e c(b) = (0, b), temos que
ℓ(c) =
Z b
a k
c′(t)kdt =
Z b
a
1 y
q£
x′(t)¤2+£y′(t)¤2dt
≥ Z b
a
1 y
q£
y′(t)¤2dt≥
Z b
a
|y′(t)| y dt
≥ Z b
a
dy
y =ℓ(γ),
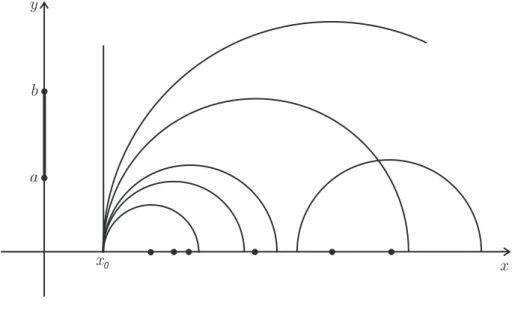
ou seja, γ minimiza arcos diferenci´aveis por partes, e ent˜ao pelo Corol´ario 1.7, a imagem deγ ´e uma geod´esica. A aplica¸c˜ao
z 7→ az+b
cz+d, z =x+iy, ad−bc= 1,
que ´e uma isometria emH2, transforma o eixoyem semi-c´ırculos superiores ou semi-retas
as geod´esicas de H2, pois por cada ponto p ∈ H2 e cada dire¸c˜ao em TpH2 passa um tal
c´ırculo com centro no eixo x.
Figura 1.4: Geod´esicas em H2
O espa¸co Hn+1 ´e completo pois as restas perpendiculares ao hiperplano xn = 0, e os
c´ırculos de Hn+1 cujos planos s˜ao perpendiculares ao hiperplano x
n = 0 e cujos centros
est˜ao neste hiperplano s˜ao geod´esicas de Hn+1. De fato, observe que uma isometria do Rn+1 que s´o envolver as vari´aveis x0, . . . , xn n˜ao altera a m´etrica dada em (1.25) e ´e,
portanto, uma isometria em Hn+1. Ent˜ao basta considerar retas e c´ırculos no planox0xn
e o exerc´ıcio que fizemos acima. Na verdade, essas s˜ao todas as geod´esicas de Hn+1.
1.9.1
Isometrias e o Modelo da Bola
Uma aplica¸c˜ao f : U ⊂ Rn+1 → Rn+1 de um aberto U ⊂ Rn+1 ´e conforme se para todop∈U e todo par de vetoresv1 ev2 em p tivermos
hdfp(v1), dfp(v2)i=λ2(p)hv1, v2i, λ2 6= 0.
A fun¸c˜ao positiva λ:U →R ´e chamada ocoeficiente de conformalidade def
As isometrias do espa¸co hiperb´olico no modelo do semi-espa¸co s˜ao as restri¸c˜oes a
Hn+1 ⊂ Rn+1 das transforma¸c˜oes conformes de Rn+1 que levam Hn+1 sobre si mesmo. Uma demonstra¸c˜ao deste resultado, encontra-se em [17].
Identificaremos algumas hipersuperf´ıcies importantes do espa¸co hiperb´olicoHn+1. As
1.9. O Espa¸co Hiperb´olico
deRn+1 ortogonais a∂Hn+1, e as interse¸c˜oes de Hn+1 com as esferas de Rn+1 com centro
em ∂Hn+1.
O espa¸co hiperb´olico possui outros modelos al´em do semi-espa¸co. Um deles veremos agora, que ´e o modelo da bola. Considere a bola Bn+1 ⊂ Rn+1 de raio 2 e centro na origem,
Bn+1 ={p∈Rn+1;|p|= 2}
e introduza a m´etrica
hij(p) =
δij
¡
1− 14|p|2¢2.
Considere a aplica¸c˜ao f :Bn+1 →Hn+1 dada por f(p) = 4 p−p0
|p−p0|2 −(0, . . . ,0,1), em que p0 = (0, . . . ,0,−2).
Mostraremos que f ´e uma isometria, e portanto, Bn+1 ´e isom´etrico aHn+1.
Com efeito, sev ´e um vetor empeh,iindica o produto interno na m´etrica euclidiana,
hdfp(v), dfp(v)i=
16hv, vi
|p−p0|4. Por outro lado, indicando f(p) = (f1(p), . . . , fn(p)), obteremos
fn(p) =
4(xn+ 2)
|p−p0|2 −1 =
4− |p|2
|p−p0|2. Portanto,
hdfp(v), dfp(v)i
¡
fn(p)
¢2 =
16|p−p0|4hv, vi
¡
4− |p|2¢2|p−p 0|4
= ¡ hv, vi 1−1
4|p|2
¢2.
Da injetividade de f, conclui-se que f ´e uma isometria de Bn+1 em Hn+1. Observe que f
leva ∂Bn+1− {p} em ∂Hn+1.
Note que uma aplica¸c˜ao g : Bn+1 → Bn+1 ´e uma isometria de Bn+1 na m´etrica h
ij,
se e somente se, g ´e a restri¸c˜ao de uma transforma¸c˜ao conforme do Rn+1 que leva Bn+1
sobre Bn+1.
Observe f leva∂Bn+1− {p0} em ∂Hn+1. O pontop0 seria ent˜ao levado no “infinito”,
pois nesse ponto o denominador da fra¸c˜ao na f´ormula de f se anularia uma potˆencia a mais do que o numerador.
Figura 1.5: Modelo da bola, Bn+1
do plano hiperb´olico mapeado no disco. A gravura mostra como n´os, euclidianos natos, vemos o mundo hiperb´olico desses chat´oides. Quando um chat´oide se afasta do centro do disco, vemos seu tamanho encolher ficando cada vez menor `a medida que se aproxima do c´ırculo limite. O chat´oide, ´e claro, n˜ao concorda com essa nossa descri¸c˜ao do que acontece em seu mundo. Para ele, nada muda de tamanho quando se desloca pelo disco. Isso se justifica j´a que suas r´eguas e trenas s˜ao modificadas na mesma propor¸c˜ao que seus corpos.
1.9.2
Superf´
ıcies Umb´
ılicas do
H
n+1As superf´ıcies Umb´ılicas no espa¸co hiperb´olico s˜ao as esferas, horoesferas e as su-perf´ıcies eq¨uidistantes (ou hiperesferas), como descreveremos a seguir.
As esferas s˜ao as esferas euclidianas que est˜ao totalmente contidas em Hn+1. Se o
modelo do espa¸co hiperb´olico for o da bola Bn+1, ent˜ao essas superf´ıcies ser˜ao esferas
contidas na bola aberta de raio 2, centradas na origem.
Consideremos, a seguir, uma n-esfera euclidiana S tangente a ∂Hn+1 em um ponto p,
tal que S− {p} ⊂Hn+1. Por uma invers˜ao do Rn+1 em p(que ´e uma isometria do Hn+1)
S ´e levada em um hiperplano P paralelo a ∂Hn+1. Como a m´etrica induzida em P por Hn+1 ´e um m´ultiplo da m´etrica euclidiana, e P tem curvatura constante zero, o mesmo
acontece com S − {p}. Essas subvariedades s˜ao chamadas de horoesfera. No modelo
1.9. O Espa¸co Hiperb´olico
limite de uma fam´ılia de esferas que passam por um pontoppr´e-fixado e cujos centros se deslocam ao longo de uma reta fixa.
Figura 1.6: Horoesfera
Quando q→ ∞ em L, as esferas se aproxima a uma superf´ıcie. Esta superf´ıcie ´e um plano passando emp no caso do Rn+1. NoHn+1, esta superf´ıcie ´e a horoesfera.
Considere finalmente uma esfera euclidiana S que corta∂Hn+1 segundo um ˆangulo θ,
e sua interse¸c˜ao S∩Hn+1 = Σ comHn+1. Por uma invers˜ao deRn+1 em um ponto deS∩
∂Hn+1, Σ ´e levada isometricamente na interse¸c˜ao comHn+1 de um hiperplanoP que corta
∂Hn+1 segundo o mesmo ˆangulo θ. Considere o hiperplano Q que ´e ortogonal a ∂Hn+1 e cont´emP ∩∂Hn+1. Vejamos, queP ´e uma hipersuperf´ıcie eq¨uidistante da hipersuperf´ıcie
totalmente geod´esicaQ. Para isto, sejaγr uma geod´esica, ,representada em Hn+1 por um
semi-c´ırculo de raior, com centro 0 emP ∩∂Hn+1 e no plano perpendicular a P∩∂Hn+1.
Como existe uma homotetia de centro 0 (isometria hiperb´olica) levando o c´ırculo de raio r em um c´ırculo de raio qualquer, o comprimento de γr entre os pontos de interse¸c˜ao
de γr com P e Q n˜ao depende de r. Conclui-se que P, ou sua imagem isom´etrica Γ, ´e
obtida tomando geod´esicas perpendiculares a uma hipersuperf´ıcie totalmente geod´esicaQ e marcando sobre elas uma distˆancia fixa. tais hipersuperf´ıcies s˜ao chamadas superf´ıcies eq¨uidistantes (ou hiperesferas).
As superf´ıcies umb´ılicas em Hn+1, possuem curvatura m´edia constante, mais
Cap´ıtulo 2
Equa¸
c˜
oes Diferencias Parciais e o
Princ´ıpio do M´
aximo
Apresentaremos neste cap´ıtulo ferramentas necess´arias de Equa¸c˜oes Diferenciais Par-ciais (EDPs) que nos ser˜ao ´uteis para obten¸c˜ao dos pr´oximos resultados, que podem ser encontrados no livro de Gilbarg & Trundiger [7]. Estamos interessados no Princ´ıpio do M´aximo e o M´etodo da Continuidade para Equa¸c˜oes Quasilineares El´ıpticas de 2a ordem.
2.1
Continuidade H¨
older
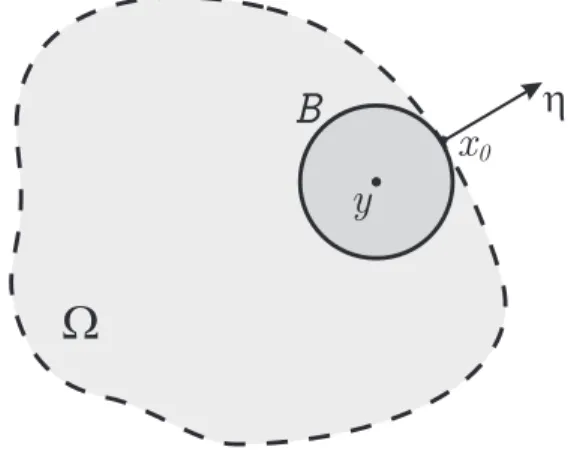
Sejax0um ponto emRnef uma fun¸c˜ao definida em um conjuntoDlimitado contendo
x0. Se 0< α <1, dizemos quef ´eH¨older cont´ınuacom expoenteαemx0 se a quantidade
[f]α,x0 = sup D x6=x0
|f(x)−f(x0)|
|x−x0|α (2.1)
´e finita. Chamamos [f]α,x0 o α-Coeficiente de H¨older de f no ponto x0 com respeito a D. Claramente, se f ´e H¨older cont´ınua em x0, ent˜ao f ´e cont´ınua em x0. Quando (2.1) ´e finita para α= 1, f ´e dita ser lipschitziana em x0.
2.1. Continuidade H¨older
expoente α em Dse a quantidade
[f]α,D = sup
x,y∈D x6=y
|f(x)−f(y)|
|x−y|α , 0< α≤1 (2.2)
´e finita; elocalmente H¨older cont´ınuacom expoenteαemD sef ´e uniformemente H¨older cont´ınua com expoente α em todo subconjunto compacto de D. Obviamente que esses dois conceitos coincidem quandoD´e compacto. Al´em disso note que continuidade local de H¨older ´e uma propriedade mais forte do que H¨older continuidade pontual em subconjuntos compactos.
Continuidade de H¨older mede a continuidade que especialmente ´e bem adaptada ao estudo de EDPs. Num certo sentido, pode ser visto tamb´em como uma diferenciabilidade fracion´aria. Isto sugere uma extens˜ao natural dos espa¸cos bem conhecidos de fun¸c˜oes diferenci´aveis.
Seja Ω um conjunto aberto de Rn ek um inteiro n˜ao negativo. Os espa¸cos de H¨older
Ck,α(Ω) (Ck,α(Ω)) s˜ao definidos como os subespa¸cos de Ck(Ω) (Ck(Ω)) consistindo de
fun¸c˜oes cujas derivadas parciais de ordem k s˜ao uniformemente H¨older cont´ınuas (local-mente H¨older cont´ınuas) com expoenteα em Ω. Por simplicidade escrevemos
C0,α(Ω) =Cα(Ω), C0,α(Ω) =Cα(Ω),
com a compreens˜ao que 0< α < 1 sempre que esta nota¸c˜ao ´e usada, a menos que, caso contr´ario seja declarado.
Tamb´em, fixando
Ck,0(Ω) =Ck(Ω), Ck,0(Ω) =Ck(Ω),
podemos incluir os espa¸cos Ck(Ω) (Ck(Ω)) entre os espa¸cos Ck,α(Ω) (Ck,α(Ω)) para
0 < α < 1. Designamos por C0k,α(Ω) o espa¸co de fun¸c˜oes em Ck,α(Ω) que tem suporte compacto em Ω.
Estabelecemos as seguintes defini¸c˜oes:
[u]k,0;Ω = |Dku|0;Ω = sup
|β|=k
sup Ω |
Dβ|u, k= 0,1,2, . . .
a[u]k,α;Ω = [Dku]α;Ω = sup
|β|=k
[Dβu]α;Ω,
onde que, para todo β = (β1, . . . , βn), onde βi ´e um inteiro positivo e |β| =Piβi, temos
Dβu= ∂
|β|u
∂xβ1 1 · · ·∂x
βn
n
Com estas “semi-normas”, n´os podemos definir as normas relacionadas
kukCk(Ω) = |u|k;Ω =|u|k,0;Ω =
k
X
j=0
[u]j,0;Ω=
k
X
j=0
|Dju|0;Ω,
kukCk,α(Ω) = |u|k,α;Ω =|u|k;Ω+ [u]k,α;Ω =|u|k;Ω+ [Dku]α;Ω,
nos espa¸cos Ck(Ω) e Ck,α(Ω), respectivamente. `As vezes ´e ´util introduzir normas n˜ao-dimensionais em Ck(Ω), Ck,α(Ω). Se Ω ´e limitado, temos
kuk′Ck(Ω) = |u|
′
k;Ω=
k
X
j=0
dj[u]j,0;Ω=
k
X
j=0
dj|Dju|0;Ω,
kuk′Ck,α(Ω) = |u|
′
k,α;Ω =|u|′k;Ω+dk+α[u]k,α;Ω =|u|′k;Ω+dk+α[Dku]α;Ω.
onde d= diam Ω = sup x,y∈Ω
x6=y
|x−y|.
Os espa¸cos Ck(Ω), Ck,α(Ω), munidos com essas respectivas normas, s˜ao espa¸cos de Banach.
2.2
Equa¸
c˜
oes Diferenciais Parciais El´
ıpticas
Apresentaremos, nesta se¸c˜ao, a solu¸c˜ao do cl´assico problema de Dirichlet para certos tipos de equa¸c˜oes el´ıpticas totalmente n˜ao-lineares; isto ´e, equa¸c˜oes el´ıpticas que n˜ao s˜ao quasilinear.
Uma equa¸c˜ao diferencial parcial de segunda ordem pra fun¸c˜oes reais em um dom´ınio Ω⊂Rn´e uma express˜ao da forma
F[u] =F(x, u,∇u,Hess u) = 0, (2.3)
onde F : Γ → R ´e uma fun¸c˜ao definida no conjunto Γ = Ω ×R×Rn× Am, em que
Am =Rn(n−1)/2 ´e o espa¸co vetorial das formas bilineares sim´etricas. Denotaremos pontos em Γ porγ = (x, z, p, r), em quex∈Ω,z ∈R,p= (pi)1≤i≤n∈Rner= (rij)1≤i,j≤n∈ Am.
Se F ´e linear nas vari´aveis z, p e r ent˜ao a equa¸c˜ao (2.3) ´e dita linear. Se ´e linear nas vari´aveis r= (r)ij, ent˜ao a equa¸c˜ao (2.3) ´e dita quase-linear.
O operador F ´eel´ıptico num subconjunto U de Γ se a matriz ¡Fij(γ)
¢
, dada por
Fij(γ) =
∂F ∂rij