Invariantes por Subgrupos a 1-Parˆ
ametro de Isometrias
Gil F. de Souza
1Susana C. Fornari
21
Aluno de p´os-gradua¸c˜ao em Matem´atica UFMG, e-mail: [email protected]
2
Sum´
ario
1 Isometrias e Grupos a um parˆametro 4
1.1 Um pouco sobre transforma¸c˜oes lineares ortogonais. . . 4
1.2 Isometrias . . . 5
1.3 O Grupo de Isometrias deR3. . . 6
2 Curvas e Superf´ıcies 11 2.1 Curvas . . . 11
2.2 Superf´ıcies . . . 12
2.3 Superf´ıcies e Isometrias . . . 14
2.4 A Imagem da a¸c˜ao dos grupos Gα,β em pontos deR3. . . 15
3 Superf´ıcies Translacionais 17 4 Superf´ıcies Rotacionais 19 4.1 As Roulettes das cˆonicas. . . 19
4.1.1 A Roulette da Par´abola. . . 20
4.1.2 Roulettes em rela¸c˜ao a uma reta . . . 23
4.1.3 A Ondul´oide . . . 25
4.1.4 A Nod´aria . . . 28
4.2 As Curvaturas M´edias do Caten´oide, Ondul´oide e Nod´oide. . . 30
4.3 Superf´ıcies Rotacionais de Curvatura M´edia Constante. . . 31
5 Superf´ıcies Helicoidais 34 5.1 Parametriza¸c˜ao Natural e o Lema de Bour. . . 34
Agradecimentos
Agrade¸co `a minha orientadora Susana pela paciˆencia e tempo empreendido n˜ao somente no desenvolvimento deste trabalho como, tamb´em, durante a minha Inicia¸c˜ao cient´ıfica sempre me apresentando belos temas. Agrade¸co aos professores do Dmat-Icex e amigos dos demais cursos. Em especial `a Sˆonia pelas dicas valiosas que tanto me ajudaram na corre¸c˜ao deste trabalho e o enriqueceram. Agrade¸co ao professor Alberto Sarmiento pelas sugest˜oes e cr´ıticas, ao Michel pelas belas figuras em Cabri e ao meu amigo Agnaldo pela confec¸c˜ao da figura 5.1.
SUM ´ARIO 3
Introdu¸
c˜
ao
Neste trabalho estudamos as superf´ıcies em R3 de curvatura m´edia constante invariantes por subgrupos a 1-parˆametro de isometrias.
No cap´ıtulo 1, revisamos alguns conceitos de ´Algebra Linear e Teoria de Grupos. Identificamos ainda o grupo ISO(R3) das isometrias de R3 com o subgrupoG(4) de matrizes 4×4 da forma:
G(4) =
T a
0 1
, T ∈O(3), a∈M3×1(R),0∈M1×3(R)
e mostramos que subgrupos a 1-parˆametro deG(4) s˜ao, a menos de conjuga¸c˜ao, da forma
Gα,β =
cos(αt) sen(αt) 0 0
−sen(αt) cos(αt) 0 0
0 0 1 βt
0 0 0 1
;t∈R
,
sendoαeβ n´umeros reais.
No cap´ıtulo 2, revisamos alguns conceitos da Geometria das curvas e superf´ıcies. Al´em de estudarmos a a¸c˜ao dos gruposGα,β sob pontos deR3. Grande parte dos cap´ıtulos 1 e 2 foi baseada em [8].
Seα= 0, o grupoG0,β cont´em as transla¸c˜oes e ´e denominadogrupo de transla¸c˜ao; no caso em que β = 0,Gα,0
cont´em as rota¸c˜oes e ´e ditogrupo de rota¸c˜ao; seαeβ s˜ao ambos n˜ao nulos, Gα,β ´e chamadogrupo de movimentos
helicoidais. Uma superf´ıcieS tal queg(S) =Spara todog∈Gα,β´e ditaGα,β-invariante. As superf´ıcies invariantes
pelos gruposG0,β, Gα,0eGα,β s˜ao chamadas superf´ıcies translacionais, rotacionais e helicoidais, respectivamente.
No cap´ıtulo 3, estudamos as superf´ıcies translacionais, concluindo que as ´unicas superf´ıcies translacionais de curvatura m´edia constante s˜ao o cilindro circular e o plano.
No cap´ıtulo 4, estudamos as superf´ıcies rotacionais e mostramos um resultado devido a Ch, Delaunay: “Su-perf´ıcies rotacionais de curvatura m´edia constante s˜ao obtidas pela rota¸c˜ao das roulettes das cˆonicas.” Sendo roulette a trajet´oria descrita por um dos focos de uma cˆonica enquanto ela (a cˆonica) rola sobre uma reta sem deslizar. O conte´udo deste cap´ıtulo foi baseado no artigo [5] de J. Eells.
Seja:
ΣH={superf´ıcies helicoidais emR3 de curvatura m´ediaH =cte6= 0}
e S1 o c´ırculo unit´ario parametrizado por (cosθ,senθ) (θ ∈ [0,2π)). No cap´ıtulo 5, mostramos que existe uma
aplica¸c˜ao diferenci´avel, 2π-peri´odica e sobrejetiva
φ(θ, B0) : S1×[0,∞)→ΣH,
tal queφ(0,[0,∞)) s˜ao as superf´ıcies rotacionais em ΣH. Para a superf´ıcie rotacional S(B0) =φ(0, B0) (B0 fixo),
φ(θ, B0) (θ∈[0,2π)) ´e uma fam´ılia de superf´ıcies helicoidais associada a S(B0) (no sentido de que cada superf´ıcie
dessa fam´ılia ´e isom´etrica aS(B0)). O conte´udo deste cap´ıtulo foi baseado no trabalho de Manfredo P. do Carmo e
Isometrias e Grupos a um parˆ
ametro
Para dar in´ıcio ao estudo dassuperf´ıcies invariantes por subgrupos a 1-parˆametro de isometriasR3, faremos uma breve exposi¸c˜ao sobre isometrias, grupos de isometrias e subgrupos a um parˆametro de isometrias.
1.1
Um pouco sobre transforma¸
c˜
oes lineares ortogonais.
Defini¸c˜ao 1.1 Uma transforma¸c˜ao ortogonal, ´e uma transforma¸c˜ao linearC:R3→R3 tal que
hCv, Cwi=hv, wi,
para todo par de vetoresv e w∈R3.
Defini¸c˜ao 1.2 Para cada transforma¸c˜ao linearT :R3→R3, a adjunta de T ´e a transforma¸c˜ao T∗ :R3 →R3 tal
que
hT u, vi=hu, T∗vi,
para todo paru, v∈R3.
Segue naturalmente de [7] que seC´e uma transforma¸c˜ao ortogonal, ent˜ao:
(a)CC∗=C∗C=I, ondeI ´e a identidade deR3.
(b)C∗´e uma transforma¸c˜ao ortogonal.
(c) detC=±1.
(d)C preserva a norma euclideana.
Defini¸c˜ao 1.3 O(3) ={C:R3→R3; CC∗=I}´e o conjunto das transforma¸c˜oes ortogonais deR3.
Proposi¸c˜ao 1.1 O conjuntoO(3), em rela¸c˜ao `a opera¸c˜ao de multiplica¸c˜ao de matrizes (ou composi¸c˜ao de fun¸c˜oes), ´e um grupo.
Demonstra¸c˜ao:
(1) Vejamos queO(3) ´e fechado em rela¸c˜ao `a opera¸c˜ao. SejamC eC′∈O(3), ent˜ao
hCC′u, CC′vi=hC′u, C′vi=hu, vi. LogoCC′ ∈O(3).
(2) Sabemos que a opera¸c˜ao ´e associativa.
(3) O elemento neutro ´e dado pela identidadeIdeR3.
CAP´ITULO 1. ISOMETRIAS E GRUPOS A UM PAR ˆAMETRO 5
(4) Pela defini¸c˜ao deO(3), o inverso deC∈O(3) ´eC∗ logoO(3) ´e um grupo.
Defini¸c˜ao 1.4 Um subespa¸co V ⊂R3 ´e dito invariante por uma transforma¸c˜ao linearT :R3→R3 se T(V) =V.
Proposi¸c˜ao 1.2 Sejam C ∈O(3) e V um subespa¸co invariante por C. Ent˜ao o complemento ortogonal, V⊥, de V
´e invariante por C.
Demonstra¸c˜ao:
C´e bijetora, pois detC=±16= 0. Sejam x∈V ey∈V⊥. ComoV ´e invariante porC,Cx∈V e logo
hCx, yi= 0. ComoC´e bijetora, existe y′ ∈R3tal que y=Cy′. Portanto
0 =hCx, yi=hCx, Cy′i=hx, y′i
e logoy′∈V⊥, ou seja,V⊥ ´e invariante porC.
Proposi¸c˜ao 1.3 DadaC∈O(3), existe uma base ortonormal em que a representa¸c˜ao de C ´e
Cα=
cosα −senα 0 senα cosα 0
0 0 ±1
, α∈R.
Demonstra¸c˜ao:
O polinˆomio caracter´ıstico deC p(λ) =det(C−λI) ´e um polinˆomio de coeficientes reais e grau trˆes. Portanto p(λ) possui pelo menos uma raiz realλ0. Ent˜aoCv=λ0v. Desde queC´e transforma¸c˜ao ortogonal o valor deλ0´e 1
ou -1, poiskCvk=kvk=|λ0| kvk. Suponhamos queC possua apenas um autovalor real e que esse autovalor ´e 1.
Consideremos a base ortonormal{v1, v2, v3}tal quev3´e autovetor associado aλ0 = 1 e os vetoresv1 ev2 formam
uma base (ortonormal) de{v: Cv=v}⊥. ComoC ´e transforma¸c˜ao ortogonal ev
1⊥v2, resultaCv1⊥Cv2. Al´em
disso,Cv1 eCv2 s˜ao unit´arios e ,por hip´otese,{v: Cv=v}⊥ n˜ao possui nenhum subespa¸co de dimens˜ao 1 deixado
invariante por C. Portanto existeα∈Rtal que Cv1= cosαv1−senαv2 eCv2 = senαv1+ cosαv2 . Assim na base
{v1, v2, v3} a representa¸c˜ao deC´eCα.
No caso em que todas as ra´ızes dep(λ) s˜ao reais,R3pode ser escrito comoR3={v: Cv=v} ⊕ {v: Cv=−v}. Nesse ´ultimo caso, com a escolha de uma base ortonormal para esses dois subespa¸cos, a representa¸c˜ao matricial de C´eCα, comα= 0 ouα=π, o que conclui a proposi¸c˜ao.
1.2
Isometrias
Defini¸c˜ao 1.5 Uma fun¸c˜ao g : R3 →R3 tal que k g(u)−g(v) k=ku−v k para todo paru, v em R3 ´e dita uma isometria.
Exemplo 1.1 Um exemplo trivial de isometria ´e a transla¸c˜ao por um vetora∈R3,Ta(v) =a+v , pois
kTa(u)−Ta(v)k = ka+u−(a+v)k
= ku−vk.
Exemplo 1.2 Um outro exemplo de isometria ´e uma transforma¸c˜ao linear ortogonalC∈O(3), pois
kCv−Cwk2 = hCv, Cvi+hCw, Cwi −2hCv, Cwi
= hv, vi+hw, wi −2hv, wi
Exemplo 1.3 Uma fun¸c˜ao definida porg(v) =a+Cv,a∈R3eC∈O(3)´e uma isometria pelos exemplos anteriores. Na pr´oxima proposi¸c˜ao mostraremos que toda isometriag´e da formag(v) =a+Cv,a∈R3eC∈O(3). Proposi¸c˜ao 1.4 Seja g:R3→R3 uma isometria. Ent˜ao existema∈R3 eC∈O(3) tais que
g(v) =a+Cv,
para todov∈R3.
Demonstra¸c˜ao:
Come¸camos definindoa=g(0) eC(v) =g(v)−a. Mostraremos: (a)C preserva a norma,
(b)C preserva o produto interno,
(c)C ´e linear.
Prova de (a). kC(v)k=kg(v)−ak=kg(v)−g(0)k=kv−0k=kvk. LogoC preserva a norma. Prova de (b).
hC(v), C(w)i = kC(v)−C(w)k2− kC(v)k2− kC(w)k2
= kg(v)−g(w)k2− kC(v)k2− kC(w)k2
= kv−wk2− kvk2− kwk2
= hv, wi. PortantoC preserva o produto interno.
Prova de (c). Da defini¸c˜ao deC temosC(0) = 0. Al´em disso, dos itens (a) e (b) obtemos
kC(v+w)−C(v)−C(w)k2 = hC(v+w)−C(v)−C(w), C(v+w)−C(v)−C(w)i
= kC(v+w)k2+kC(v) +C(w)k2−2hC(v+w), C(v)i
−2hC(v+w), C(w)i
= kC(v+w)k2+kC(v)k2+kC(w)k2+2hC(v), C(w)i
−2hC(v+w), C(v)i −2hC(v+w), C(w)i
= kv+wk2+kvk2+kwk2+2hv, wi
−2hv+w, vi −2hv+w, wi
= kv+wk2+kv+wk2−2hv+w, v+wi
= 0.
Logo,C(v+w) =C(v) +C(w) para todo parv, w∈R3. Juntando ao fato de queC(0) = 0, obtemos queC´e linear. Como C ´e linear e preserva produto interno, resulta que C ´e uma transforma¸c˜ao ortogonal. O que conclui a proposi¸c˜ao.
1.3
O Grupo de Isometrias de
R
3.
Proposi¸c˜ao 1.5 ISO(R3)={isometrias deR3} ´e um grupo com a opera¸c˜ao de composi¸c˜ao de fun¸c˜oes.
Demonstra¸c˜ao:
Se g, hek ∈ ISO(R3), pela Proposi¸c˜ao 1.4 existem a, b, c ∈ R3 e T, S, R ∈ O(3) tais que, g(u) =a+T u, h(u) =b+Suek(u) =c+Ru. Temos ent˜ao que
CAP´ITULO 1. ISOMETRIAS E GRUPOS A UM PAR ˆAMETRO 7
• g(hk) = (gh)k, pois
g(hk)(u) =g((b+Sc) +SRu) = (a+T(b+Sc)) +T SRu= (a+T b+T Sc) +T SRu
e
(gh)k(u) = (a+T b) +T S(c+Ru) = (a+T b+T Sc) +T SRu;
• o elemento neutro deISO(R3) ´ee(u) =u,∀u∈R3;
• o inverso de g´e g−1(u) =−T−1a+T−1u, poisgg−1(u) =a+T(−T−1a+T−1u) =ueg−1g(u) =−T−1a+
T−1(a+T u) =u.
PortantoISO(R3) ´e um grupo.
Defini¸c˜ao 1.6 Definimos por G(4), o subgrupo de matrizes 4×4 com a forma
G(4) =
T a
0 1
, T ∈O(3), a∈M3×1(R), 0 = (0,0,0)∈M1×3(R)
. (1.1)
Proposi¸c˜ao 1.6 ISO(R3)´e isomorfo aG(4).
Demonstra¸c˜ao:
Recordemos que dois gruposG1 eG2, s˜ao isomorfos quando existe uma fun¸c˜ao bijetora ψ : G1 → G2 tal que
ψ(g.g′) =ψ(g).ψ(g′), para todog eg′∈G
1. Seja
φ: ISO(R3) −→ G(4)
g(u) =a+T u 7→
T a
0 1
.
Parag(u) =a+T u, h(u) =b+Sutemosg.h= (a+T b) +T Su eφ(g) =
T a
0 1
eφ(h) =
S b
0 1
. Ent˜ao
φ(g).φ(h) = T a 0 1 . S b 0 1 =
T S T b+a
0 1
=φ(gh).
Agora devemos mostrar queφ´e um isomorfismo, i.e, uma aplica¸c˜ao bijetora. Oraφ´e injetora, pois seφ(g) =φ(h) ent˜aoT =S ea=b, portantog=h. Para mostrar a sobrejetividade, seja
T a
0 1
∈G(4),
ent˜ao
T a
0 1
=φ(g),
comg(u) =a+T u.
Defini¸c˜ao 1.7 Dizemos que um subgrupo H de G ´e subgrupo a 1-parˆametro se existe uma aplica¸c˜ao cont´ınua e sobrejetoraψ: (R,+)→Gtal queψ(r+s) =ψ(r).ψ(s)para todo r e s ∈R.
Lema 1.0.1 SejamH ⊂G(4) um subgrupo a 1-parˆametro eh∈H. Ent˜ao deth= 1. Demonstra¸c˜ao:
Com efeito, sejah=
C a
0 1
∈G(4). O determinante deh´e dado por deth= detC=±1. ComoH ´e subgrupo a 1-parˆametro, existe um homomorfismo sobrejetivoψ : (R,+) →H tal que ψ(1) = h. Mas ψ(1) = ψ(1
2).ψ( 1 2) =
ψ(12)2. Assim
deth= detψ(1) = det ψ 1 2 2 = detψ 1 2 2
>0.
Defini¸c˜ao 1.8 g1 e g2∈Gs˜ao conjugados, se existeg∈Gtal queg2=gg1g−1, analogamente dois subgruposH1 e
H2 deGs˜ao conjugados, se existeg∈Gtal queH2=gH1g−1.
Exemplo 1.4 SeC∈O(3), da Proposi¸c˜ao 1.3, existe uma base ortonormalB={u1, u2, u3}tal que a representa¸c˜ao
deC ´eCα. Denotemos por Aa matriz de passagem da base ortonormal fixa para a base B. Ent˜ao Cα =A−1CA.
AssimC eCα s˜ao conjugadas.
Lema 1.0.2 Seja H ⊂G(4) um subgrupo a 1-parˆametro Ent˜ao todo
h= C a 0 1 ∈H
´e conjugado, por elemento deG(4), a uma matriz da forma
φα,β =
cosα senα 0 0
−senα cosα 0 0
0 0 1 β
0 0 0 1
=
C
α 0 0 β0 0 0 1
ondeα, β∈R.
Demonstra¸c˜ao:
Sejah=
C a
0 1
∈H e suponhamos que exista g=
S b
0 1
∈G(4) tal queh=gφα,βg−1, i.e,hg=gφα,β, ou
seja C a 0 1 S b 0 1 = S b 0 1
C
α 00 β0 0 0 1
. (1.2)
O que faremos ´e determinarS, beβ satisfazendo a equa¸c˜ao (1.2). Por igualdade de matrizes em (1.2), obtemos
CS=SCα, (1.3)
Cb+a=S(0,0, β) +b. (1.4)
De (1.3) vemos que,S´e a matriz de passagem da base canˆonica para a base formada por vetores ortonormais tal que a matriz deC tem a representa¸c˜aoCα. Portanto S∈O(3). ConsideremosS = [v1v2 v3], sendov1,v2 ev3 vetores
coluna deS. Al´em disto, de (1.3) temos que v3´e base do subespa¸co de dimens˜ao 1 invariante porC. Temos ent˜ao
que
(C−I)b=βv3−a,
Assim, perguntamos: Para qualβ o vetorβv3−a∈Im(C−I)? Respondendo a esta pergunta encontraremosbeβ
e, finalmente, determinaremosg.
Pelo Lema 1.0.1, deth= 1, poish´e um elemento de um subgrupo a 1-parˆametro. Logo o n´umero de subespa¸cos de dimens˜ao 1 da forma{v: Cv=v} deixados invariantes porC ´e 1 ou 3. Al´em disso, o n´umero de subespa¸cos de dimens˜ao 1 da forma{v: Cv=−v} ´e 0 ou 2, pois sen˜ao ter´ıamos detC=−1. Assim dividimos a pergunta acima em dois casos:
1o Caso) dimIm(C −I) = 2: Nesse caso dimN uc(C −I) = 1 e v
3 ´e base de N uc(C−I), pois v3 ´e base de
{v: Cv=v}=N uc(C−I). Comov1,v2 ev3 formam uma base ortonormal deR3 temos que
Cv1= (cosα)v1+ (senα)v2
e
CAP´ITULO 1. ISOMETRIAS E GRUPOS A UM PAR ˆAMETRO 9
para algumα∈R. Temos ent˜ao que
(C−I)v1= (cosα−1)v1+ (senα)v2
e
(C−I)v2=−(senα)v1+ (cosα−1)v2.
Logoh(C−I)v1,(C−I)v2i= (cosα−1)senα−senα(cosα−1) = 0 e{(C−I)v1,(C−I)v2}´e um conjunto linearmente
independente que geraIm(C−I), ou seja, {(C−I)v1,(C−I)v2}´e base para Im(C−I). Desde que (C−I)v1 e
(C−I)v2 s˜ao escritos como combina¸c˜ao linear dev1ev2, ent˜ao podemos tomar{v1, v2} base paraIm(C−I). Al´em
dissoR3=Im(C−I)⊕N uc(C−I). Ent˜ao todo vetor dev∈R3 pode ser escrito na forma v= ˜v+ ˜βv3, com ˜v∈Im(C−I),v3∈N uc(C−I) e ˜β ∈R.
Assim, escrevemos
a=ha, v1iv1+ha, v2iv2
| {z }
∈Im(C−I)
+ ha, v3iv3
| {z }
∈N uc(C−I)
.
Tomamosβ =ha, v3ie escolhemos b na imagem inversa do vetorha, v1iv1+ha, v2iv2 por (C−I). O que conclui a
primeira parte.
2o Caso) dimIm(C−I) = 0: Escolhemos uma nova base ortonormal de R3 tal que a matriz de passagem para
esta base seja dada porS = [v1 v2 v3], com o vetor v3 que forma a terceira coluna de S sendov3 = kaak (a6= 0),
β=kak eb= 0, o que conclui o Lema.
Teorema 1.1 Todo subgrupo a 1-parˆametro deG(4)´e conjugado (por elemento de G(4)) a um subgrupo da forma
Gα,β=
C
αt0 0 βt
0 0 0 1
;t∈R
, α eβ∈Rfixos.
Demonstra¸c˜ao do Teorema 1.1:
Sejam eH grupo a 1-parˆametro deG(4) eh∈H. Suponhamos quehtenha a representa¸c˜ao abaixo,
h=
cosα senα 0 0
−senα cosα 0 0
0 0 1 β
0 0 0 1
, (1.5)
comα, β∈R. Ent˜ao existe um homomorfismo cont´ınuoψ: (R,+)→H tal queψ(1) =h. Temos
ψ(n) =ψn(1) =hn=
cos(nα) sen(nα) 0 0
−sen(nα) cos(nα) 0 0
0 0 1 nβ
0 0 0 1
.
Analogamenteψ(1) =ψm(1/m) sendo
ψ(1/m) =
cos(α/m) sen(α/m) 0 0
−sen(α/m) cos(α/m) 0 0
0 0 1 β/m
0 0 0 1
comn, m6= 0∈Z. Ent˜ao
ψ(n/m) =
cos(n
mα) sen( n
mα) 0 0
−sen(n
mα) cos( n
mα) 0 0
0 0 1 n
mβ
0 0 0 1
.
Comoψ´e cont´ınua, parat∈Rresulta
ψ(t) =
cos(αt) sen(αt) 0 0
−sen(αt) cos(αt) 0 0
0 0 1 βt
0 0 0 1
,
e esta ´e a express˜ao do homomorfismoψ.
Agora seja ˜H ⊂ G(4) um subgrupo a 1-parˆametro qualquer. Ent˜ao existe um homomorfismo cont´ınuo ˜ψ : (R,+)→H˜ tal que
˜ ψ(1) =
T a
0 1
=g
cosα senα 0 0
−senα cosα 0 0
0 0 1 β
0 0 0 1
g
−1,
comg dado peloLema 1.0.2. Repetindo o racioc´ınio anterior
˜ ψ(t) =g
cos(αt) sen(αt) 0 0
−sen(αt) cos(αt) 0 0
0 0 1 βt
0 0 0 1
g
−1,
portanto, um subgrupoH a 1-parˆametro deG(4) ´e conjugado a umGα,β.
O Teorema 1.1 afirma que podemos considerar apenas os grupos Gα,β como subgrupos a 1-parˆametro de G(4),
Cap´ıtulo 2
Curvas e Superf´ıcies
2.1
Curvas
Defini¸c˜ao 2.1 Uma curva parametrizada diferenci´avel de Rn ´e uma aplica¸c˜ao α, de classe C∞, de um intervalo
abertoI⊂Rem Rn. O conjunto dos pontos de Rn formado pelos pontosα(t),t ∈I, ´e o tra¸co de α. A curvaα´e regular se seu vetor tangente ´e n˜ao nulo para todot∈I, ou seja,α′(t)6= 0para todo t∈I.
Neste trabalho estamos interessados apenas nos casos em quen= 2 ou 3.
Exemplo 2.1 α(t) = (x0+at, y0+bt, z0+ct),t ∈R, ´e uma parametriza¸c˜ao da reta de R3 que passa pelo ponto
(x0, y0, z0) na dire¸c˜ao do vetor (a, b, c).
Exemplo 2.2 β(t) = (x0+rcost, y0+rsent, z0),t∈R, ´e uma parametriza¸c˜ao de um c´ırculo de centro (x0, y0, z0)
e raior >0.
Exemplo 2.3 γ(t) = (rcost, rsent, δt),t∈R, ´e uma parametriza¸c˜ao da h´elice circular de passoδe eixoz. Defini¸c˜ao 2.2 Uma curva α est´a parametrizada pelo comprimento de arco s se k α′(s) k= 1 para todo valor do
parˆametro s. Ou seja, se α: J ⊂→Rn, ent˜aoα´e parametrizada pelo comprimento de arco seα′(s)´e unit´ario para
todos∈J.
Exemplo 2.4 A curvaα(s) = (rcos rs, rsen sr) coms∈[0,2π) e r >0 ´e parametrizada pelo comprimento de arco, pois
kα′(s)k=k(−sens
r
,coss r
)k= r
sen2s
r
+ cos2s
r
= 1.
Defini¸c˜ao 2.3 A curvatura k(t) de uma curvaα(t) = (x(t), y(t))deR2 ´e dada por
k(t) = x
′(t)y”(t)−y′(t)x”(t)
(x′(t)2+y′(t)2)3/2 (2.1)
ou
k(s) =x′(s)y”(s)−y′(s)x”(s) (2.2) seαest´a parametrizada pelo comprimento de arcos.
Exemplo 2.5 A curva α(t) = (acost, bsent), t ∈R´e a curva cujo tra¸co ´e a elipse de equa¸c˜ao xa22 +
y2
b2 = 1 e sua curvatura ´e
k(t) = ab
(a2sen2t+b2cos2t)3/2.
Observamos que a curvatura da elipse n˜ao se anula.
Exemplo 2.6 A curvaα(t) = (acosht, bsenht),t∈R´e a curva cujo tra¸co ´e a hip´erbole de equa¸c˜ao xa22 −
y2
b2 = 1 e sua curvatura ´e
k(t) = −ab
a2senh2t+b2cosh2t3/2.
Observamos que a curvatura da hip´erbole ´e n˜ao nula para todot∈R.
Defini¸c˜ao 2.4 Sejaαuma curva parametrizada pelo comprimento de arco emR2e sejan(s)o vetor normal unit´ario `
aαno pontoα(s). As F´ormulas de Frenet s˜ao:
α”(s) = k(s)n(s)
n′(s) = −k(s)α′(s) (2.3)
2.2
Superf´ıcies
Defini¸c˜ao 2.5 Uma superf´ıcie parametrizada regular ´e uma aplica¸c˜ao X : U ⊂R2 →R3, onde U ´e um aberto, tal que
(a)X´e diferenci´avel de classeC∞;
(b) para todo par(u, v)∈U, temos Xu(u, v)∧Xv(u, v)6= 0, onde Xu(u, v)∧Xv(u, v) denota o produto vetorial de
Xu(u, v)eXv(u, v).
O subconjunto S deR3 formado pelos pontos X(u, v)´e o tra¸co da aplica¸c˜ao X.
Exemplo 2.7 O tra¸co de X(u, v) = (rcosu, rsenu, v), com (u, v)∈R2er >0, ´e o cilindro de equa¸c˜aox2+y2=r2.
Exemplo 2.8 O tra¸co de X(u, v) = (cosusenv,senusenv,cosv), com (u, v)∈(0,2π)×(0, π) ´e a esferaS2de centro
na origem e raio 1 menos um meridiano.
Exemplo 2.9 Sejaα(u) = (f(u),0, g(u)),u∈I ⊂Ruma curva regular tal queg′(u)6= 0 para todoudo intervalo
I. Ent˜ao a superf´ıcie obtida pela rota¸c˜ao de α(u) em torno do eixo z ´e uma superf´ıcie regular parametrizada por X(u, v) = (f(u) cosv, f(u)senv, g(u)),v∈[0,2π].
Exemplo 2.10 O tra¸co deX(u, v) = (ucosv, usenv, v), com (u, v)∈R2, ´e chamado helic´oide.
CAP´ITULO 2. CURVAS E SUPERF´ICIES 13
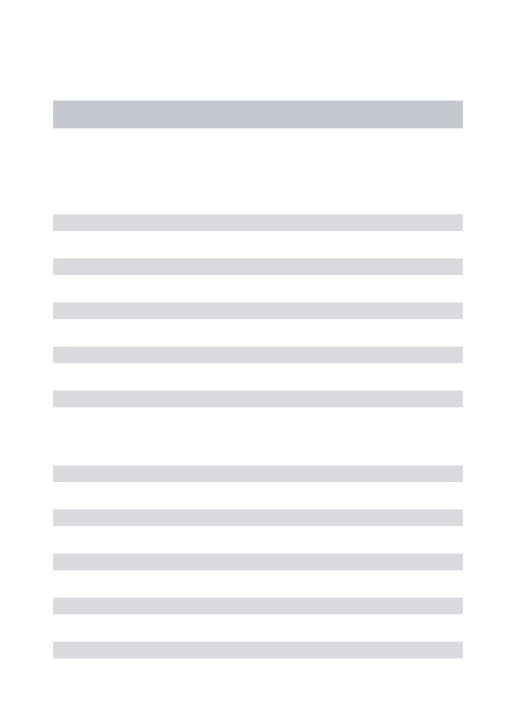
Exemplo 2.11 Consideramos superf´ıcie obtida pela rota¸c˜ao de ˆangulo v em torno do eixo z seguida da eleva¸c˜ao de δv da curva (2 + cosu,0,senu). Uma parametriza¸c˜ao para tal superf´ıcie ´e X(u, v) = ((2 + cosu) cosv,(2 + cosu)senv,senu+δv), (u, v)∈R2, ondeδ ´e um n´umero real e seu caso particularδ= 0. Observamos que seδ= 0, a parametriza¸c˜aoX(u, v) descreve o toro obtido pela rota¸c˜ao do c´ırculo no planoxOz de raio 1 e centro(0,2,0).
Figura 2.2: O tra¸co das superf´ıcies do exemplo 2.11
Defini¸c˜ao 2.6 A aplica¸c˜ao de GaussN :U →S2 de uma superf´ıcieX : U →R3 ´e definida por
N(u, v) = Xu(u, v)∧Xv(u, v)
kXu(u, v)∧Xv(u, v)k =
Xu∧Xv
kXu∧Xv k,
onde Xu=
∂X
∂u e Xv=
∂X ∂v.
Defini¸c˜ao 2.7 A curvatura m´edia H de uma superf´ıcie S, parametrizada por X(u, v) e a curvatura Gaussianna K s˜ao dadas respectivamente por
H= gE−2f F+eG
2 (EG−F2) (2.4)
e
K= eg−f
2
EG−F2, (2.5)
onde
E=hXs,Xsi
F =hXs,Xti
G=hXt,Xti
, (2.6)
s˜ao os coeficientes da Primeira Forma Fundamental e
e=hXss, Ni
f =hXst, Ni
g=hXtt, Ni
, (2.7)
Exemplo 2.12 As curvaturas m´edia e gaussiana do cilindro circular reto do exemplo 2.7, com parametriza¸c˜ao dada
porX(u, v) = (rcosu, rsenu, v)s˜ao H=−21r e K= 0.
Exemplo 2.13 SejaS a superf´ıcie obtida pela rota¸c˜ao da curva (x(u), y(u),0),u∈I⊂R, em torno do eixo x. S ´e parametrizada por
X(u, v) = (x(u), y(u) cosv, y(u)senv), v∈R. Temos
Xu= (x′(u), y′(u) cosv, y′(u)senv) Xv= (0, y(u)senv, y(u) cosv)
N(u, v) =(x′(u)2+y1′(u)2)1/2(−y
′(u), x′(u) cosu, x′(u)senv) X
uu= (x”(u), y”(u) cosv, y”(u)senv)
Xuv= (0,−y′(u)senv, y′(u) cosv) Xvv= (0,−y(u) cosv,−y(u)senv)
.
Assim
E=x′(u)2+y′(u)2 F = 0 G=y(u)2
e= x”(u)y
′(u)
−x′(u)y”(u)
(x′(u)2+y′(u)2)3/2 f = 0 g=−
y(u)x′(u) (x′(u)2+y′(u)2)1/2
.
Portanto,
H =x”(u)y
′(u)−x′(u)y”(u)
(x′(u)2+y′(u)2)3/2 −
x′(u)
y(u)(x′(u)2+y′(u)2)1/2. (2.8)
Observemos que a primeira parcela deH em (2.8) ´e a curvatura da curva (x(u), y(u),0) (dacurva geratrizdeS).
2.3
Superf´ıcies e Isometrias
Veremos que a curvatura m´ediaH de uma superf´ıcieS e a curvatura m´edia ˜H da superf´ıcieh(S), onde hpertence a um subgrupo a 1-parˆametro deISO(R3), s˜ao iguais (i.e,H = ˜H).
Proposi¸c˜ao 2.1 Sejamh∈G, G subgrupo a 1-parˆametro deISO(R3), S parametrizada porX(u, v)eh(S) parame-trizada porh(X(u, v)). Ent˜ao as curvaturas m´edias H e ˜H, respectivamente, s˜ao iguais.
Demonstra¸c˜ao: Mostraremos:
(a) Os coeficientesE,F eGdeS s˜ao iguais aos coeficientes ˜E, ˜F e ˜Gdeh(S) s˜ao iguais.
(b) Os coeficientese,f eg deS s˜ao iguais aos coeficientes ˜e, ˜f e ˜gdeh(S) s˜ao iguais.
Do cap´ıtulo 1, temos que seh∈ISO(R3), ent˜ao h(u) =a+T u, a∈R3, T ∈O(3). Logo: z(u, v) =h(X(u, v)) = a+T(X(u, v)). Portanto
zu = TXu
zv = TXv .
Ent˜ao
˜
E=hzu, zvi=hXu,Xvi=E.
Analogamente temos que ˜F=F e ˜G=G. Temos ainda;
zuu = TXuu
zuv = TXuv
zvv = TXvv
.
No vetor normal ˜N(u, v) = zu×zv
kzu×zv k
= TXu×TXv
kTXu×TXv k
, podemos escreverkTXu×TXvk=kXu×Xv k, pois
pelaidentidade de Lagrange
CAP´ITULO 2. CURVAS E SUPERF´ICIES 15
Assim
˜
N(u, v) = TXu×TXv
kXu×Xv k
.
Calculando o coeficiente ˜eda Segunda Forma Fundamental.
˜
e = hTXuu,N˜(u, v)i=
TXuu,
TXu×TXv
kXu×Xv k
=
det
TXuu
TXu
TXv
kXu×Xvk
= det(h)
kXu×Xv k
det Xuu Xu Xv
= det(h)hXuu, N(u, v)i
= det(h).e.
SendoN(u, v) o vetor normal de X(u, v). Pelo Lema 1.0.1, det(h) = 1. Logoe= ˜e. Analogamente, ˜f =f e ˜g=g. Juntando (a) e (b) com a express˜ao (2.4), obtemosH = ˜H.
Defini¸c˜ao 2.8 Dizemos que uma superf´ıcie S ´e invariante por um subgrupo G⊂ISO(R3)(G-invariante) seh(S) =S
para todoh∈G.
Unindo a Proposi¸c˜ao 2.1 com o Teorema 1.1, vemos que para estudar as superf´ıcies em R3 de curvatura m´edia constante invariantes por subgrupos a 1-parˆametro de ISO(R3), basta estudar as superf´ıcies de curvatura m´edia constante invariantes pelos grupos Gα,β. A nossa pr´oxima se¸c˜ao se dedicar´a a descrever as formas que os grupos
Gα,β podem assumir e estudar a imagem da a¸c˜ao desses grupos.
2.4
A Imagem da a¸
c˜
ao dos grupos
G
α,βem pontos de
R
3No cap´ıtulo 1, vimos que o grupoISO(R3) ´e isomorfo ao grupoG(4). Al´em disso, todo subgrupo a 1-parˆametro de ISO(R3) ´e identificado, a menos de conjuga¸c˜ao, com um subgrupo de G(4) da forma
Gα,β =
cos(αt) sen(αt) 0 0
−sen(αt) cos(αt) 0 0
0 0 1 βt
0 0 0 1
,
ondeαeβ∈R.
Primeiramente, veremos comoGα,β age sobre pontos deR3. Recordemos que uma isometriahdeR3´e da forma
h(u) =a+T u, a∈R3 eT ∈O(3). Ap´os a identifica¸c˜ao com G(4), temos ˜h=
T a
0 1
. Observamos que ˜hage
sobre u 1 = u1 u2 u3 1
do mesmo modo quehage sobre o vetor u= (u1, u2, u3)∈R
3, pois
˜ h u 1 = T a 0 1 u 1 =
T u+a 1
.
Portanto, ˜h∈G(4) age sobre vetores (u1, u2, u3,1)∈R4 da mesma forma queh∈ISO(R3) age sobre (u1, u2, u3)∈
R3.
Agora, estudaremos as formas deGα,βe sua a¸c˜ao em vetores (u1, u2, u3) (estamos identificando (u1, u2, u3,1)∈R4
com o vetor (u1, u2, u3)∈R3).
(a)α= 0 eG0,β cont´em transla¸c˜oes na dire¸c˜ao do eixo z. A imagem da a¸c˜ao deG0,β sobre (x0, y0, z0) ´e uma reta
na dire¸c˜ao do eixoz, pois
I
00 βt0 0 0 1
x0 y0 z0 1 = x0 y0
z0+βt
1
.
(b)β= 0 eGα,0 cont´em as rota¸c˜oes em torno do eixoz. A imagem da a¸c˜ao deGα,0sobre (x0, y0, z0) ´e um c´ırculo
de centro (0,0, z0) e raio
p x2
0+y02.
cos(αt) sen(αt) 0 0
−sen(αt) cos(αt) 0 0
0 0 1 0
0 0 0 1
x0 y0 z0 1 =
x0cos(αt)−y0sen(αt)
x0sen(αt) +y0cos(αt)
z0 1 .
(c) No casoα6= 0 eβ6= 0, temosGα,β=G1,δ, ondeδ=α/β, pois, seja
φ
αt,βt=
cos(αt) sen(αt) 0 0
−sen(αt) cos(αt) 0 0
0 0 1 βt
0 0 0 1
∈Gα,β.
Ent˜ao
φ
αt,βt=
φ
1.αt,β.δt∈G1,δ. Reciprocamente, temosφ
t,δt=
φ
α.t α,β.t
α∈Gα,β, logoGα,β=G1,δ.
Quanto `a a¸c˜ao deG1,δ sobre um ponto (x0, y0, z0), temos
cost sent 0 0
−sent cost 0 0
0 0 1 δt
0 0 0 1
x0 y0 z0 1 =
x0cost−y0sent
x0sent+y0cost
z0+δt
1
,
Cap´ıtulo 3
Superf´ıcies Translacionais
Superf´ıcies Translacionaiss˜ao aquelas invariantes por transla¸c˜oes em uma dada dire¸c˜ao deR3.
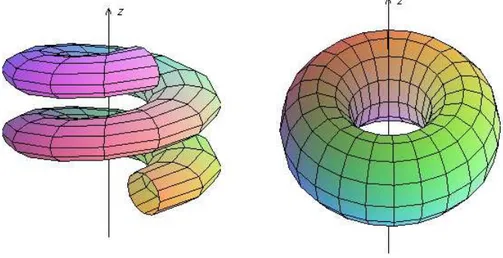
Exemplo 3.1 O cilindro α(t) +rw, sendo α(t) = (x(t), y(t),0), t definida no intervalo I⊂ R, r ∈ R e
w= (w1, w2, w3), ´e invariante pela transla¸c˜ao de qualquer m´ultiplo de w.
Figura 3.1: Um cilindro.
Proposi¸c˜ao 3.1 Seja S uma superf´ıcie translacional de curvatura m´edia constante, ent˜ao ou S ´e um plano, ou S ´e um cilindro.
Demonstra¸c˜ao:
Pelo Teorema 1.1, o subgrupo a 1-parˆametro das transla¸c˜oes em uma dada dire¸c˜ao ´e identificado, via mudan¸ca de coordenadas, com o subgrupo a um parˆametroG0,β. As superf´ıcies translacionais s˜ao ent˜ao superf´ıcies invariantes
porG0,β. Observamos que uma superf´ıcieG0,β-invariante possui um ponto da forma (x, y,0), pois se (x, y, z)∈S,
comoS´eG0,β-invariante e a transla¸c˜aogdada por (0,0,−z) pertence aG0,β, resultag(x, y, z) = (x, y,0)∈S.
SeS uma superf´ıcieG0,β-invariante parametrizada por X(u, v), (u, v)∈U ⊂R2. Como para todo p∈S existe
uma reta na dire¸c˜ao de (0,0,1), consideramos a parametriza¸c˜ao de uma destas retas dada por X(u(t), v(t)), t∈R, ent˜ao
dX dt = Xu
du dt + Xv
dv dt
´e um vetor na dire¸c˜ao de (0,0,1), portanto (0,0,1) pertence a todo plano tangente de S. Logo seu vetor normal em cada ponto ´e linearmente independente com o vetor (0,0,1) o que faz da intersec¸c˜ao de S com o planoxOy uma curva regular plana, denotemos esta curva porγ(s) = (x(s), y(s),0), j´a tomando-a com o parˆametro comprimento de arcos, ent˜ao uma parametriza¸c˜ao paraS ´e X(s, t) = (x(s), y(s), t).
Ent˜ao calculamos os vetores Xse Xt, tangentes aS.
Xs= (x′(s), y′(s),0), (3.1)
e
Xt= (0,0,1). (3.2)
Seu vetor normal ´e dado por,
Xs∧Xt=β(y′(s),−x′(s),0).
Ent˜ao a aplica¸c˜ao normal deS ´eN(s, t) = (y′(s),−x′(s),0), poiskX
s∧Xtk= 1.
Temos
xss = (x”(s), y”(s),0)
xst = (0,0,0)
xtt = (0,0,0)
,
e
e = x”(s)y′(s)−x′(s)y”(s)
f = 0
g = 0
,
a express˜ao da curvatura m´edia de S´e,
2H =x”(s)y′(s)−x′(s)y”(s). (3.3)
A express˜ao obtida em (3.3) ´e a express˜ao da curvatura deγa menos de sinal, portantoγ(s) ´e uma reta ou uma
circunferˆencia. Reciprocamente, seS ´e um cilindro circular reto de raioa >0, sua curvatura m´edia ´eH = 1 2a ([2], pg 147); se S ´e um plano ent˜aoH = 0 ([2], pg 147). Portanto se S ´e uma superf´ıcie G0,β-invariante de curvatura
Cap´ıtulo 4
Superf´ıcies Rotacionais
Superf´ıcies rotacionais s˜ao as superf´ıcies que s˜ao invariantes por rota¸c˜oes emR3, ou seja, por rota¸c˜oes em rela¸c˜ao a uma dada reta. Seu estudo se reduz ao estudo da curva geratriz, isto ´e, a curva descrita pela intersec¸c˜ao da superf´ıcie com um plano que contenha o eixo de rota¸c˜ao.
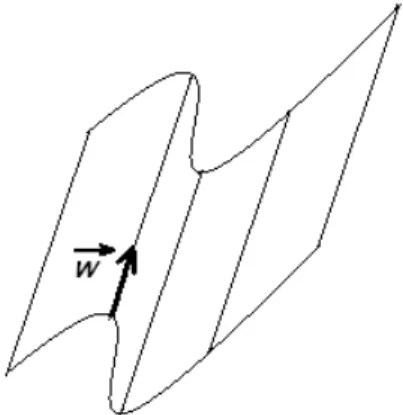
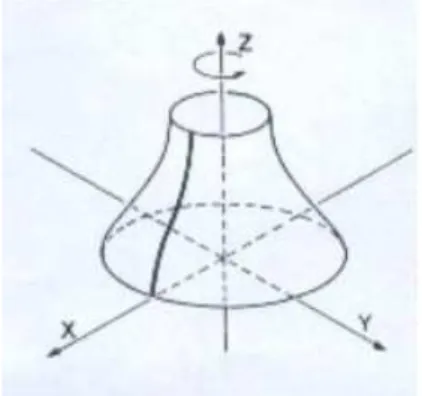
Figura 4.1: Uma superf´ıcie de rota¸c˜ao de eixoz.
Pelo Teorema 1.1, o subgrupo das rota¸c˜oes em rela¸c˜ao a um determinado eixo ´e identificado, via mudan¸ca de coordenadas, com o subgrupo a um parˆametroGα,0. As superf´ıcies rotacionais, s˜ao, ent˜ao, superf´ıcies invariantes
porGα,0.
Neste cap´ıtulo mostraremos os seguinte resultado provado por C. Delaunay em 1841 [4]:
Teorema 4.1 (Delaunay) Uma superf´ıcie rotacional de curvatura m´edia constante ´e obtida pela rota¸c˜ao da roulette de uma cˆonica.
A demonstra¸c˜ao apresentada se baseia no artigo de Eells [5] e segue as seguintes etapas: 1o) descreveremos as roulettes das cˆonicas;
2o) iremos calcular as curvaturas m´edias das superf´ıcies obtidas pela rota¸c˜ao destas curvas;
3o) via express˜ao da curvatura m´edia, demonstraremos que a curva geratriz de uma superf´ıcie de rota¸c˜ao de curvatura
m´edia constante n˜ao-nula satisfaz `as equa¸c˜oes das roulettes da elipse ou da hip´erbole.
4.1
As Roulettes das cˆ
onicas.
Descreveremos as roulettes das cˆonicas.
4.1.1
A Roulette da Par´
abola.
Como ilustra¸c˜ao, determinaremos , primeiro a roulette da par´abola. Uma par´abolade focoF e retadiretrizr´e o conjunto {K ∈R2 : dist(K, F) =dist(K, r)}. O ponto V da par´abola com a menor distˆancia a r´e denominado v´ertice da par´abola. V est´a na reta perpendicular arque cont´em o focoF da par´abola, pois a reta que ´e perpendicular are passa porF ´e a que d´a a menor distˆancia entreF e a diretriz, portanto a menor distˆancia entre a par´abola e a diretriz.
Figura 4.2: Par´abola com foco F=(0,c).
Tomando o sistema de coordenadas cartesianas (x, y) em queV=(0,0) e o eixo x´e paralelo `a reta diretriz, sejamF= (0, c) o foco ey=−c a reta diretriz. A equa¸c˜ao da par´abola ´e
y= x
2
4c. (4.1)
Defini¸c˜ao 4.1 A roulette do foco F em rela¸c˜ao a uma reta tangente `a par´abola ´e a trajet´oria que F descreve enquanto a par´abola rola sobre esta reta sem deslizar.
O objetivo desta se¸c˜ao ´e mostrar que esta roulette ´e uma caten´aria. Para tal vamos mostrar os seguintes lemas:
Lema 4.1.1 Sejam t a reta tangente `a par´abolay= x
2
4c em um pontoK= (x0, x2
0
4c)e P o ponto de intersec¸c˜ao de t
com o eixo x. Ent˜ao P =x0 2 ,0
.
Demonstra¸c˜ao:
A equa¸c˜ao det´ey= x0 2cx−+
x0
2cx− x2
0
4c. Logo, paray= 0 temos P = x0
2 ,0
. Para determinar
a coordenaday da roulette, encontraremos um pontoP′ det tal queP′F seja perpendicular at. O pr´oximo lema
determinar´aP′.
Lema 4.1.2 Com a nota¸c˜ao do Lema 4.1.1, FP ´e perpendicular `a reta t.
Demonstra¸c˜ao:
Sejam m := coeficiente angular da reta F P e m′ := coeficiente angular de t. Basta mostrar quem.m′ =−1.
Comom= −c x0/2
=−2c
x0
em′= x0
2c e portanto,m.m
′ =−2c
x0
.x0
2c =−1. LogoF P ⊥t.
A figura 4.3 representa dois instantes diferentes em que a par´abola rola sem deslizar sobre o eixox, que ´e a reta tangente do v´ertice.
.
o primeiro instante (em linha cheia) representa o momento inicial do movimento em que a par´abola ´e tangente ao eixoxemV = (0,0) e o foco est´a emF = (0, c) e est´a representada tamb´em a reta tangentetemK;CAP´ITULO 4. SUPERF´ICIES ROTACIONAIS 21
Figura 4.3: Par´abola rolando.
Lema 4.1.3 Uma parametriza¸c˜ao em coordenadas cartesianas da roulette da par´abola de equa¸c˜ao y= x
2
4c ´e
β(x) = Z x
0
r 1 + r
2
4c2dr−
x 2
r 1 + x
2
4c2 , c
r 1 + x
2
4c2
!
(4.2)
Demonstra¸c˜ao:
A par´abola de equa¸c˜aoy = x
2
4c pode ser parametrizada porα(x) =
x,x
2
4c
. Pelo Lema 4.1.1, P =x 2,0
e logo|P F|=
c2+x2
4 1/2
=c
1 + x
2
4c2
1/2
. Analisando o instante em que o pontoK =
x,x
2
4c
´e tangente ao
eixox, as coordenadas do foco (agora representado por F˜) s˜ao dadas por (|VP˜|,|P˜F˜|) = (|VP˜|,|P F|). Ora
|VP˜|=|VK˜| − |P ˜˜K|, onde|VK˜|´e o comprimento do arco da par´abola de 0 at´ex,ou seja
|VK˜|= Z x
0
1 + r
2
4c2
1/2
dr.
Por outro lado,
|P K|=x−x22+
x2
4c 1/2
= x 2
1 + x
2
4c2
1/2
.
Logo
|VP˜|= Z x
0
1 + r
2
4c2
1/2
dr−x2
1 + x
2
4c2
1/2
.
Lema 4.1.4 Seja α(s) = (x(s), y(s))a reparametriza¸c˜ao por comprimento de arco da roulette da par´abola dada por
β(x) = (x(x), y(x))do Lema 4.1.3. Ent˜ao
dx
ds =
c
Demonstra¸c˜ao: Ora
e
x(x) = Z x
0
1 + r
2
4c2
1/2
dr−x2
1 + x
2
4c2
1/2
y(x) = c
1 + x
2
4c2
1/2
. Calculando a derivada dex(x), temos
x′(x) =
1 + x
2
4c2
1/2
−12
1 + x
2
4c2
1/2
−x2(4(2cx2))
1 2
1 + x
2
4c2
−1/2
= 1 2
1 + u
2
4c2
1/2
.
Calculando a derivada dey(x), temos
y′(x) =c2x 4c2
1 2
1 + x
2
4c2
−1/2
= x 4c
1 + x
2
4c2
−1/2
.
Logo
x′(x)2+y′(x)2=1 4
1 + x
2
4c2
−1
+ x
2
16c2
1 + x
2
4c2
−1
=1 4.
Como o parˆametro comprimento de arco sdeβ ´e dado pors(x) =R0x|β′(r)|dr=Ru
0
p
x′(r)2+y′(r)2dr, temos
ds
dx =
q
x′(x)2+y′(x)2. Logo dx
ds =
1 p
x′(x(s))2+y′(x(s))2 = 2. Assim, pela regra da cadeia,
dx ds = dx dx. dx ds = 1 2
1 + x(s)
2
4c2
1/2
.2 = c
y(x(s))= c y(s).
Proposi¸c˜ao 4.1 A roulette da par´abola de equa¸c˜ao y= x
2
4c ´e a caten´aria de equa¸c˜ao y=ccosh( x c)
Demonstra¸c˜ao:
Pela equa¸c˜ao (4.3) dx
ds =
c
y(s). Comoβ(x(s)) =β(s) ´e regular, temos que a roulette da par´abola ´e (localmente)
o gr´afico de uma fun¸c˜ao (x, y(x)). Al´em disso, ds
dx = 1 +
dy dx
2!1/2
6
= 0,portanto,
dx
ds = 1 +
dy dx
2!−1/2
.
Ent˜ao reescrevemos (4.3) como,
1 + dy
dx
2!−1/2
= c
y. (4.4)
Logo, 1 + dy dx 2 = y 2 c2 dy
dx = ±
y
c 2
−1 1/2
CAP´ITULO 4. SUPERF´ICIES ROTACIONAIS 23
Observando quez/c≥1 (c´e a menor distˆancia do foco a par´abola) e resolvendo a equa¸c˜ao diferencial acima por separa¸c˜ao de vari´aveis obtemos
y=y(x) =ccosh±xc +const.. Considerandoy(0) =c, resultaconst.= 0. Como cosh ´e uma fun¸c˜ao par, obtemos
y(x) =ccosh±xc=ccoshx c
.
Figura 4.4: A Caten´aria.
4.1.2
Roulettes em rela¸
c˜
ao a uma reta
A subse¸c˜ao anterior ´e a motiva¸c˜ao desta subse¸c˜ao. Determinaremos propriedades ´uteis das roulettes em rela¸c˜ao a uma reta.
Defini¸c˜ao 4.2 A roulette de um ponto F associado a curva C em rela¸c˜ao a uma reta tangente `a C ´e a trajet´oria descrita por F enquanto C rola sobre esta reta tangente sem deslizar.
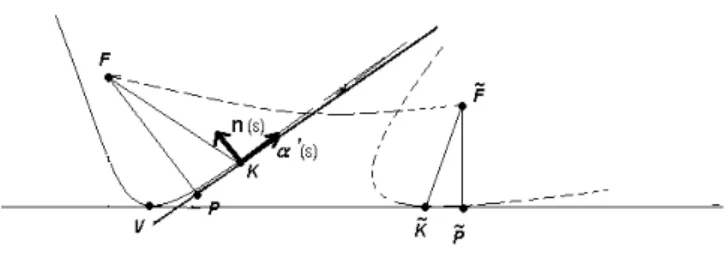
Proposi¸c˜ao 4.2 SejamC uma curva regular com curvatura que n˜ao se anula eF um ponto que n˜ao pertence aC. Seja β a roulette de F associado a C em rela¸c˜ao a uma retra tangente `a C. Sejam F˜ um ponto de β e K˜ o ponto de contato de C com o eixo x (nesse instante). Ent˜ao a roulette de F em rela¸c˜ao `a reta tangente de C ´e uma curva regular, al´em disso a reta normal a roulette em ˜F passa por ˜K, ou seja o segmento ˜F ˜K ´e perpendicular `a reta tangente `
a roulette em ˜F.
Demonstra¸c˜ao:
Consideramos a roulette deF = (x0, y0) associada `a curvaC parametrizada porα(s), ondes´e o parˆametro
comprimento de arco da curvaC.
A figura 4.5 representa dois instantes diferentes:
• No primeiro instante, antes deCcome¸car a rolar, est˜ao indicados o pontoF = (x0, y0), a retat, tangente aC
emK=α(s), o pontoP ∈ttal queF P ⊥te os vetores tangente e normal `a C (α′(s) =α′ e n(s) = n);
• o segundo momento representa o instante em queC rolou sobre o eixox, sem deslizar, at´e o pontoK (agora representado por ˜K) ser tangente ao eixo x.
Figura 4.5: Uma roulette.
1. determinamos o vetor−−→F K;
2. determinamos uma parametriza¸c˜aoβ(s) para a roulette;
3. calculamosh−−→F˜K, α˜ ′(s)i, concluindo a proposi¸c˜ao.
SuponhamosCorientada de tal modo que o vetor normal unit´ario n(s) emK=α(s) aponte para “dentro”(fig. 4.5).
Temos−−→F K =h−−→F K, α′iα′+h−−→F K,nin = (|PK|)α′−(|PF|)n.
No segundo instante,C rolou at´eKser tangente ao eixox(Kagora ´e representado por ˜K). Nesse instante os vetores (1,0) e (0,1) desempenham o papel de vetores tangente e normal, respectivamente, `aC em ˜K e
−−→˜
FK˜ = (h−−→F K, α′i, hF K,−−→ n′i) = (|P K|,−|P F|).
As coordenadas de ˜F = (˜x,y˜) s˜ao dadas por
˜
x=|VK˜| − |P˜K˜|=|VK˜| − |P K|
˜
y=|P˜F˜|=|P F| . (4.5)
|VK˜|´e igual ao comprimento de arco deC entreV =α(0) eK=α(s). Logo|VK˜|=s, pois s´e o parˆametro comprimento de arco deC. Como|P K|=h−−→F K, α′ie|P F|=−h−−→F K,ni, uma parametriza¸c˜ao da roulette de
F ´e
β(s) = (s− h−−→F K, α′i, −h−−→F K,ni). (4.6)
O vetor−−→F K=−−→F K =α(s)−F e logo d ds
−−→
CAP´ITULO 4. SUPERF´ICIES ROTACIONAIS 25
β′(s) = (1− d
dsh
−−→
F K, α′i, d dsh
−−→
F K,ni) =
1−
d ds
−−→
F K, α′
+h−−→F K, α”i
,
d ds
−−→
F K,n′
+h−−→F K,n′i
= 1−hα′, α′i+h−−→F K, α”i , hα′,ni+h−−→F K,n′i
= −h−−→F K, α”i, h−−→F K,n′i
= k−h−−→F K,ni, −h−−→F K, α′i
= k(−|P F|,−|P K|),
pois pelas f´ormulas de Frenet,α” =kn e n′=−kα′ , ondeka curvatura deC emα(s). Portanto
h−−→F˜K, F˜ ′(s)i=k(−|P K|.|P F|+ (−|P F|)(−|P K|)) = 0,
o que conclui a demonstra¸c˜ao. A afirma¸c˜ao de que a roulette ´e uma curva regular ´e resultado imediato da equa¸c˜aoβ′(s) =k(−|P F|,−|P K|), poisk6= 0.
Observa¸c˜ao 4.1 Na demonstra¸c˜ao da Proposi¸c˜ao 4.2, para a deduzir uma equa¸c˜ao para β(s) utilizamos a hip´otese de que a retat, tangente `aC, tem inclina¸c˜ao positiva (figura 4.5). No entanto, settivesse inclina¸c˜ao negativa, com a mesma escolha de orienta¸c˜ao em C, obter´ıamos a mesma parametriza¸c˜aoβ(s) para a roulette.
Observa¸c˜ao 4.2 A Proposi¸c˜ao 4.2 foi demonstrada sob a hip´otese de que a curvatura deC n˜ao se anula, o que garante que a trajet´oria deF ´e uma curva regular.
Corol´ario 4.2.1 Seja γ(s) = (x(s), y(s))a reparametriza¸c˜ao de β(s)pelo parˆametro comprimento de arco s. Ent˜ao, com a mesma nota¸c˜ao da Proposi¸c˜ao 4.2,
|F˜K˜|=±|P˜F˜|
dx ds
−1
=±y(s)
dx ds
−1
, (4.7)
onde ˜K ´e o ponto de contato de C com o eixo x.
Demonstra¸c˜ao: Com efeito, como visto na proposi¸c˜ao anterior ,β′(s) =k(−|P F|,−|P K|) =−k(|P F|,|P K|),
logo
kβ′(s)k=|k|p(|P F|)2+ (|P K|)2=|k|.|F K|.
Por hip´otesek6= 0, da´ı
β′(s)
kβ′(s)k =±
|P F| |F K| ,
|P K| |F K|
.
Comoγ(s) = (x(s), y(s)) ´e a reparametriza¸c˜ao pelo comprimento, ent˜ao
dx
ds =±
|P F| |F K| =±
y(s)
|F K|.
4.1.3
A Ondul´
oide
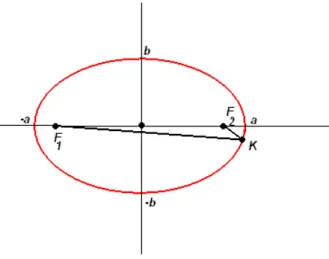
A elipse de focosF1= (−c,0) eF2= (c,0) ´e o conjunto dos pontosK∈R2 tais que a soma dos comprimentos
dos raios focais ´e constante, ou seja|F1K|+|F2K|= 2a >0, onde a > c´e o comprimento do semi-eixo maior
eb=√a2−c2o comprimento do semi-eixo menor.
Figura 4.6: A Elipse.
Proposi¸c˜ao 4.3 A roulette de um dos focos de uma elipse(ondul´aria) em ela¸c˜ao a uma reta tangente ´e uma curva regular.
Analogamente ao caso da par´abola, faremos uso de propriedades da tangentet, para deduzir uma equa¸c˜ao para a ondul´oide.
Proposi¸c˜ao 4.4 Seja β(s) = (x(s), y(s))a parametriza¸c˜ao da ondul´aria pelo comprimento de arco. Ent˜ao a fun¸c˜ao coordenadax(s)satisfaz
dx
ds =±
y(s)2+b2
2ay(s) , (4.8)
sendo “a”o semi-eixo maior e “b”o semi-eixo menor da elipse.
Demonstra¸c˜ao:
Vamos considerar a elipse de centroO e semi-eixos maior e menor dados poraeb. Consideramos ainda o c´ırculo de centroO e raioa. Relativamente `a elipse e o c´ırculo, temos:
– O ˆangulo formado pelos raios focais e a tangentets˜ao iguais (figura 4.7).
– Os pontosP1eP2de intersec¸c˜ao detcom o c´ırculo de centroOe raioa, s˜ao tais queP1F1⊥teP2F2⊥t.
– |P1F1|.|P2F2|=b2.
As duas ´ultimas propriedades s˜ao menos conhecidas. Para uma demonstra¸c˜ao das mesmas, ver [9], p´agina 111. Na figura 4.8, consideramos a trajet´oria do focoF2 da elipse enquanto ela rola sem deslizar sobre o eixox.
Os triˆangulos
F1P1KeF2P2Ks˜ao semelhantes. Logo
|P1F1|
|P2F2|
=|F1K|
|F2K|
. (4.9)
Manipulando (4.9),
|P1F1|
|P2F2|
= |P1F1|.|P2F2| (|P2F2|)2
= b
2
(|P2F2|)2
CAP´ITULO 4. SUPERF´ICIES ROTACIONAIS 27
Figura 4.7: Segmentos ortogonais na elipse.
Figura 4.8: Elipse rolando.
Al´em disso
|F1K|
|F2K|
= |F1K|+|F2K|
|F2K| −
|F2K|
|F2K|
= 2a
|F2K|−
1
e portanto
b2
(|P2F2|)2
= 2a
|F2K|−
1. (4.10)
Pela Proposi¸c˜ao 4.3 a roulette de uma elipse ´e uma curva regular e portanto admite parametriza¸c˜ao pelo comprimento de arco. O segmento |P2F2| ´e a coordenada y da roulette da elipse e pelo Corol´ario 4.2.1,
|F2K|=±y(s)
dx ds
−1
que ao ser substitu´ıda em (4.10) d´a
b2
y(s)2 =±
2a y(s)
dx
ds −1 (4.11)
sendoso parˆametro comprimento de arco da roulette. Ent˜ao
dx
ds =±
y(s)2+b2 2ay(s) ,
o que demonstra a Proposi¸c˜ao.
el´ıpticas ( ver [4]).
Observa¸c˜ao 4.3 Considera¸c˜oes sobre a equa¸c˜ao dx ds =±
y(s)2+b2
2ay(s) :
a) No caso em quea=b a elipse ´e um c´ırculo de raioade “focos”F1=F2 e a roulette se reduz a uma reta da
formay=a;
b) no caso limiteb= 0 (i.e,limb→0dxds) a elipse degenera-se em um segmento de reta de comprimento 2aeF2
em um dos extremos do segmento. Nesse caso, a roulette ´e constituida por semi-c´ırculos de raio 2a.
4.1.4
A Nod´
aria
AHip´erboledefocosF1 eF2´e o conjunto dos pontosK do plano tais que
|F1K| − |F2K|=±2a; (4.12)
em que a < c. Sendo o semi-eixo tranverso o valor a e b =√c2−a2 o semi-eixo conjugado. Os segmentos
|F1K|e|F2K|s˜ao denominados porraios focais(fig. 3.12).
Figura 4.9: Hip´erbole.
Segue daProposi¸c˜ao 4.3 que
Proposi¸c˜ao 4.5 A roulette de um dos focos de uma hip´erbole (nod´aria) em rela¸c˜ao a uma reta tangente ´e uma curva regular.
Analogamente aos casos da par´abola e da elipse, faremos uso de propriedades da tangentet, para de deduzir uma equa¸c˜ao para a nod´aria.
Proposi¸c˜ao 4.6 Seja β(s) = (x(s), y(s))a parametriza¸c˜ao da nod´aria pelo comprimento de arco. Ent˜ao
dx
ds =±
y(s)2−b2
2ay(s) , (4.13)
sendo a e b os semi-eixos transverso e conjugado da hip´erbole.
Demonstra¸c˜ao:
Relativamente `a hip´erbole de semi-eixosaeb, centroO e focosF1eF2. Temos;
CAP´ITULO 4. SUPERF´ICIES ROTACIONAIS 29
Figura 4.10: Segmentos ortogonais na hip´erbole
Figura 4.11: Hip´erbole rolando.
– tintercepta o c´ırculo de raioae centro O, em pontosP1 eP2 tais queP1F1⊥teP2F2⊥t.
item|P1F1|.|P2F2|=b2.
Na figura 4.11, consideramos a trajet´oria do focoF2 enquanto a hip´erbole rola sobre o eixox.
Como P2KPˆ 1 = P1KFˆ 2 e F1Pˆ1K = KPˆ2F2 =
π
2, observamos que os triˆangulos F1KP1 e F2KP2 s˜ao semelhantes (trˆes ˆangulos iguais), logo
|P1F1|
|P2F2|
= |F1K|
|F2K|
. (4.14)
Manipulando (4.14),
|P1F1|
|P2F2|
=|P1F1|.|P2F2| (|P2F2|)2
= b
2
(|P2F2|)2
,
al´em disso,
|F1K|
|F2K|
=|F1K| − |F2K|
|F2K|
+|F2K|
|F2K|
=± 2a |F2K|
+ 1,
portanto
b2
(|P2F2|)2
=± 2a |F2K|
+ 1. (4.15)
´e uma curva regular. Pelo Corol´ario 4.2.1 |F2K| = ±y(s)
dx
ds −1
que ao ser substitu´ıda em (4.15),
mostra que a equa¸c˜ao da roulette deF2 satisfaz
b2
y(s)2 =±
2a y(s)
dx
ds+ 1, (4.16)
sendoso parˆametro comprimento de arco da roulette, ent˜ao
dx
ds =±
y(s)2−b2
2ay(s) ,
o que demonstra a Proposi¸c˜ao.
Novamente, a equa¸c˜ao anterior possui solu¸c˜ao em termos de fun¸c˜oes el´ıpticas (veja [4]).
Figura 4.12: A Nod´aria.
4.2
As Curvaturas M´
edias do Caten´
oide, Ondul´
oide e Nod´
oide.
Nesta se¸c˜ao realizaremos o c´alculo das curvaturas m´edias das superf´ıcies obtidas pela rota¸c˜ao das roulettes, acaten´aria, aondul´aria e anod´ariaque originam ocaten´oide, oondul´oidee onod´oide, respec-tivamente.
No Cap´ıtulo 2, observamos que uma superf´ıcie de rota¸c˜ao pode ser parametrizada por X(u, v) = (x(x), y(x) cosv, y(x)senv) e que a express˜ao de sua curvatura m´edia ´e dada por
H =x”(x)y
′(x)−x′(x)y”(x)
(x′(x)2+y′(x)2)3/2 −
x′(x)
y(x)(x′(x)2+y′(x)2)1/2
ou
H =x”(s)y′(s)−x′(s)y”(s)−x
′(s)
y(s) (4.17)
se a curva geratriz da superf´ıcie est´a parametrizada pelo parˆametro comprimento de arco.
Lema 4.1.5 Se a curva geratriz de uma superf´ıcie de rota¸c˜ao com eixo de rota¸c˜ao x est´a parametrizada ex′(s) =f(y(s)), ent˜ao
H=−12
f′(y) +f(y) y
CAP´ITULO 4. SUPERF´ICIES ROTACIONAIS 31
Demonstra¸c˜ao:
Sex′(s) ´e como acima, ent˜ao
y′(s) =±(1−f2(y))1/2⇒y” =∓(1−f2(z))−1/2f f′y′ =−f(y)f′(y),
enquanto
x” =f′(y)y′⇒x”y′ =f′(y)(y′)2=f′(y)(1−f2(y)). Ent˜ao pela equa¸c˜ao (4.17),
H =−1
2
f2(y)f′(y) +f′(y)(1−f2(y)) +f(y)
y
=−1
2
f′(y) +f(y)
y
.
Pela equa¸c˜ao (4.3) dx
ds =
c
y, por (4.8) dx
ds = ±
y2+b2
2ay , de (4.13) dx
ds = ±
y2−b2
2ay e por (4.18) calculamosH das superf´ıcies obtidas pela rota¸c˜ao das roulettes das cˆonicas:
∗ Caten´oide; f(y) = c y
H =−1
2
− c
y2 +
c y2
= 0.
Pelos c´alculos acima, a curvatura m´edia do caten´oide ´eH = 0, portanto o caten´oide ´e uma superf´ıcie m´ınima, a ´unica superf´ıcie m´ınima de revolu¸c˜ao (ver [2]).
∗ Ondul´oide, Cilindro e Esfera ; f(y) =±y
2+b2
2ay
H = −1
2
±4ay
2−(y2+b2)2a
4a2y2 ±
y2+b2
2ay2
= ∓ 1
2a.
∗ Nod´oide;f(y) =±y
2−b2
2ay
H = −1
2
±4ay
2−(y2−b2)2a
4a2y2 ±
y2−b2
2ay2
= ∓ 1
2a.
4.3
Superf´ıcies Rotacionais de Curvatura M´
edia Constante.
Pelo que vimos anteriormente, se uma superf´ıcie rotacionalS com curva geratriz parametrizada pelo comprimento de arco (x(s), y(s),0) satisfaz
dx
ds =±
y(s)2±b2
2ay(s) ,
para constantesaeb, ent˜ao a curvatura m´edia deS ´e n˜ao nula.
Proposi¸c˜ao 4.7 Uma superf´ıcie rotacional S possui curvatura m´edia constante H6= 0 se, e s´o se, a curva geratriz de S satizfaz
y2±2aydx ds±b
2= 0, aebconstantes. (4.19)
Demonstra¸c˜ao:
ComoS ´e uma superf´ıcie parametrizada regular podemos supor que localmente a sua curva geratriz ´e o gr´afico de uma fun¸c˜ao, i.e, sua curva geratriz pode ser parametrizada por (x,y˜(x),0). Logo,
H =1
2
˜ y”(x) (1 + ˜y′(x)2)3/2 −
1 ˜
y(x)(1 + ˜y′(x)2)1/2
ComoS ´e de
curvartura m´edia constante, escrevemosH =21a >0. Logo y˜”(x)
(1 + ˜y′(x)2)3/2 −
1 ˜
y(x)(1 + ˜y′(x)2)1/2
=1
a
ay˜”(x)−(1 + ˜y
′(x)2)
˜
y(x)(1 + ˜y′(x)2)3/2 = 1,
ay˜”(x)−(1 + ˜y
′(x)2)
(1 + ˜y′(x)2)3/2 −y˜(x) = 0.
Multiplicando ambos os membros desta ´ultima express˜ao por 2˜y′(x), obtemos
2ay˜′(x)y˜”(x)−(1 + ˜y
′(x)2)
(1 + ˜y′(x)2)3/2 −2˜y(x)˜y
′(x) = 0. (4.21)
A express˜ao (4.21), pode ser integrada emx. E assim,
− 2ay˜(x)
(1 + ˜y′(x)2)1/2 −y˜(x) 2=
±b2, (4.22)
sendob2uma constante. Agora, reparametrizando pelo parˆametro comprimento de arcos=Rx 0
p
1 + ˜y′(t)2dt,
obtemos
−2ay(s)dx ds −y(s)
2=
±b2, (4.23)
pois dx
ds = (1 + ˜y
′(x)2)−1/2. Isolando dx
ds em (4.23), resulta
dx
ds =
y(s)2±b2
2ay(s) .
Considerando tamb´em o casoa <0, obtemos
dx
ds =±
y(s)2±b2
2ay(s) .
Considerando, tamb´em, o caso em queH = 0 e j´a tomando da curva geratriz da superf´ıcie parame-trizada pelo comprimento de arco, obtemos
H =1
2
˜ y”(x) (1 + ˜y′(x)2)3/2 −
1 ˜
y(x)(1 + ˜y′(x)2)1/2
.
FazendoH = 0 em (2.8) obtemos
˜ y”(x) 1 + ˜y′(x)2 =
1 ˜ y(x).
Definindo u(x) = ˜y′(x), obtemos ˜y”(x) = du
dx =
du dy˜y˜
′(x) = du
dy˜u. Substituindo este resultado na ´
ultima equa¸c˜ao, obtemos
du d˜yu
1 + ˜u2 =
1 ˜ y,
que possui y = c(1 +u2)como solu¸c˜ao, onde c 6= 0 ´e uma constante. Da´ı ˜y′ =
r y
c 2
−1, cuja solu¸c˜ao ´e y = ccoshx
c + ˜c
, ou seja, a caten´aria. Reciprocamente, se a curva geratriz de uma superf´ıcie rotacionalS satisfaz (4.19) ou ´e uma caten´aria, pelos c´alculos da se¸c˜ao anterior conclu´ımos queS possui curvatura m´edia constante.
Juntando as Proposi¸c˜oes 4.1, 4.4, 4.6 e 4.7 conclu´ımos oTeorema4.1de Delaunay.
CAP´ITULO 4. SUPERF´ICIES ROTACIONAIS 33
0
Figura 4.13: As roulettes de Delaunay.
Superf´ıcies Helicoidais
Superf´ıcies Helicoidais s˜ao aquelas invariantes por movimentos helicoidais em R3, ou seja, por movimentos helicoidais em rela¸c˜ao a uma dada reta. Pelo que vimos no cap´ıtulo 2, um exem-plo de superf´ıcie helicoidal ´e dado pela superf´ıcie parametrizada por X(u, v) = (x(u) cos(αv) + y(u)sen(αv),−x(u)sen(αv) +y(u) cos(αv), z(u) +βv).
Como vimos, pelo Teorema 1.1, o subgrupo a 1-parˆametro de movimentos helicoidais em rela¸c˜ao a um determinado eixo ´e identificado, via mudan¸ca de coordenadas, com o subgrupo a 1-parˆametro G1,δ. Assuperf´ıcies helicoidais de passo δs˜ao ent˜ao superf´ıcies invariantes porG1,δ.
Nos exemplos 2.10 e 2.11 s˜ao descritas duas superf´ıcies helicoidais.
O objetivo deste cap´ıtulo ´e encontrar uma representa¸c˜ao para as superf´ıcies helicoidais de Cur-vatura M´edia constante n˜ao nula. Esta representa¸c˜ao ´e uma generaliza¸c˜ao do resultado obtido por K. Kenmotsu no artigo [6]. O Lema de Bour e O Teorema de Lawson s˜ao pe¸cas chaves para a obten¸c˜ao dessa representa¸c˜ao.
5.1
Parametriza¸
c˜
ao Natural e o Lema de Bour.
Seja W ⊂ R2 um aberto e X: W → R3 uma parametriza¸c˜ao tal que X(W) ´e o tra¸co de uma superf´ıcie helicoidal de passoδ. Suponhamos que para um abertoV ⊂W, a intersec¸c˜ao de X(V) com um plano Π⊃ {eixoz}, seja localmente o gr´afico de uma fun¸c˜aoλ(ρ) comρ∈Π∩ {z= 0}.
Renomeando eixos podemos supor Π∩ {z= 0}= eixox. Ent˜ao uma parametriza¸c˜ao para X(V)∩Π ´e β(ρ) = (ρ,0, λ(ρ)). Rodando β(ρ) em torno do eixoz de um ˆangulo ϕ∈R simultaneamente com uma eleva¸c˜ao deδ0ϕ(δ0=cte) obtemos a seguinte parametriza¸c˜ao para X(V)
X(ρ, ϕ) = (ρcosϕ, ρsenϕ, λ(ρ) +δ0ϕ), ρ∈Π∩ {z= 0}, ϕ∈R. (5.1)
SejaImm(W,R3) ={parametriza¸c˜oes deW emR3}. Dado H ∈Rconsideremos
ΣH ={X∈Imm(W,R3) : X ´e superf´ıcie helicoidal de
curvatura m´edia constante H6= 0}.
Defini¸c˜ao 5.1 Seja X(s, t) : W → R3 ∈Imm(W,R3) uma superf´ıcie helicoidal parametrizada por parˆametros (s, t) tais que as s-curvas (t = cte) s˜ao parametrizadas pelo comprimento de arco e as
t-curvas (s=cte) s˜ao h´elices ortogonais `ass-curvas, ent˜ao os parˆametros(s, t)s˜ao ditos parˆametros naturais.
Observa¸c˜ao 5.1 Pela defini¸c˜ao, a Primeira Forma Fundamental de uma superf´ıcie helicoidal para-metrizada por parˆametros naturais (s, t) ´e dada por
dσ2=ds2+U2(s)dt2. (5.2)