M. Hisham ABOU-KANDIL, professeur à l'Ecole Normale Supérieure de Cachan, pour avoir accepté de présider le jury de cette thèse. M. Bogdan MARINESCU Professeur Associé au Laboratoire SATIE de l'Ecole Normale Supérieure de Cachan et Ingénieur/Chercheur au Département Méthodes et Supports de RTE et M. Henri BOURLES, directeur du Laboratoire d'Automatisation Industrielle au Conservatoire National des Arts et Métiers, maîtres qui ont guidé mon travail et m'ont fait découvrir le monde de la recherche.
Le contexte g´en´eral de cette th`ese
RTE est impliqué dans le processus de développement du secteur électrique dont certains aspects ont été évoqués ci-dessus. A partir de ces besoins industriels concrets, plusieurs thématiques de recherche ont été identifiées, notamment la réduction des modèles dynamiques des systèmes électriques, l'analyse des petits mouvements des grands systèmes, les systèmes électriques interconnectés et la régulation de tension.
Les grands axes de la th`ese
Cela concerne particulièrement les études de faisabilité pour l'expansion de la zone synchrone européenne. De plus, cette expansion rend l’analyse de ces phénomènes de plus en plus difficile.
Organisation du manuscrit
L'ensemble des méthodes et outils développés dans les directions évoquées ci-dessus ont été appliqués à l'étude de différentes situations réelles d'interconnexion du système électrique européen ainsi que du réseau français. Les paramètres calculés peuvent être utilisés en simulation linéaire pour connaître le comportement dynamique de ce système ou lors de la synthèse de régulateurs.
Mod´elisation pour la simulation
Mod´elisation de la machine synchrone
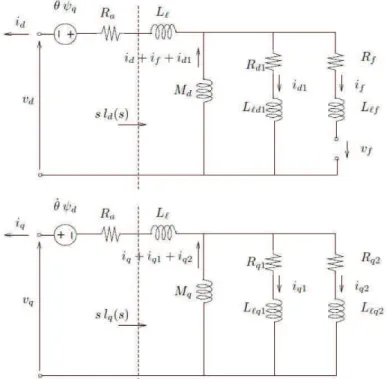
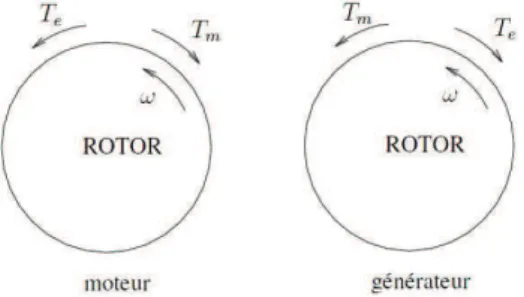
Supposons que nous appliquions un couple mécanique résistif contrarotatif Tm au rotor d'une machine, comme si nous voulions freiner le rotor. Les diagrammes de la figure 2.4 correspondent aux équations de Park d'une machine synchrone.
Mod´elisation des charges
Si l’on considère que la dépendance est uniquement fonction de la tension, on peut écrire un modèle exponentiel. Si l’on considère que la dépendance est fonction de la tension et de la fréquence, le modèle de charge statique aura la forme suivante.
Mod´elisation du r´eseau de transport
Si le module de contrainte est spécifié directement, seul θi reste comme inconnu. On peut répéter de cette manière jusqu'à ce que la production du pendule après calcul soit proche de l'estimation avant calcul.
Mod´elisation du r´egulateur de la vitesse
Plus précisément, les régulateurs de vitesse adaptent les efforts des turbines en fonction de la variation de fréquence.
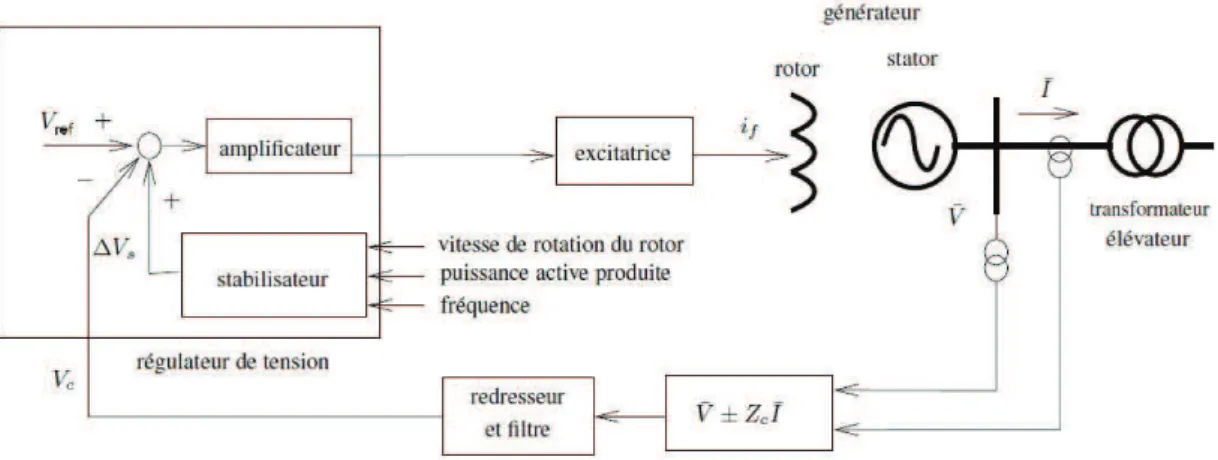
Mod´elisation de la r´egulation de tension
L'excitatrice est une machine auxiliaire qui fournit le niveau de puissance requis par l'enroulement d'excitation du générateur.
Le mod`ele d´etaill´e d’un syst`eme ´electrique pour la
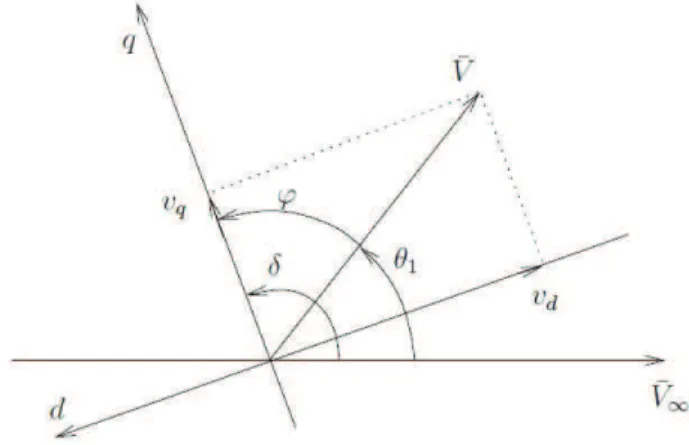
Les paramètres machine impliqués dans le modèle sont donc essentiellement : H,Xd,Xq,Xd′, Td0′ ,G,T. La figure (2.10) est le diagramme de phases par rapport aux deux tensions, avec transfert des axes de la machine.
Mod`ele simplifi´e d’un syst`eme ´electrique pour la
Mod´elisation pour l’analyse en approximation lin´eaire
Mod`ele d´etaill´e pour l’analyse modale
Mod`ele simplifi´e pour l’analyse modale
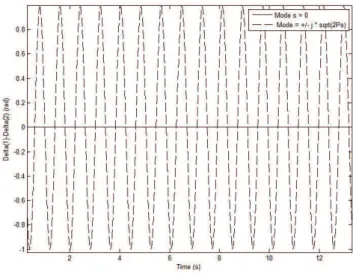
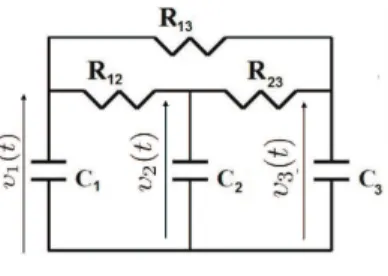
Si nous introduisons les variables de vitesse vi = ˙di avec V = [v1 v2 v3]T, nous pouvons décrire le système de la figure 2.12 dans la représentation d’état standard. Si le modèle classique est utilisé pour les voitures, on obtient un système oscillatoire similaire aux deux systèmes précédents.
Mod´elisation pour la commande en tension
Mod`ele de commande
Pour répondre à ce problème, nous avons proposé dans cette thèse d'utiliser un modèle réduit comme modèle de régulation de tension. Par conséquent, les régulateurs conçus avec ce modèle prendront des mesures efficaces une fois mis en œuvre dans l’ensemble du système.
Construction du mod`ele de commande
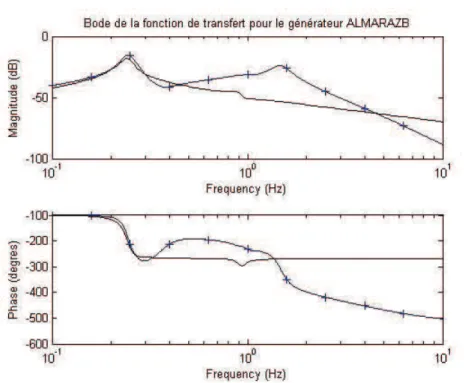
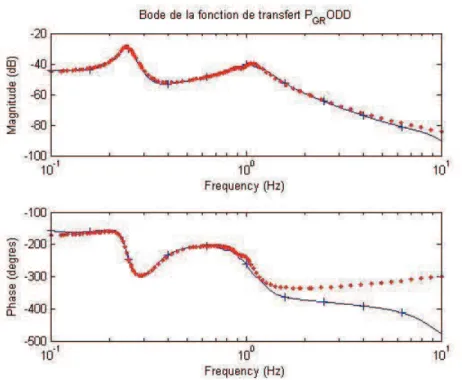
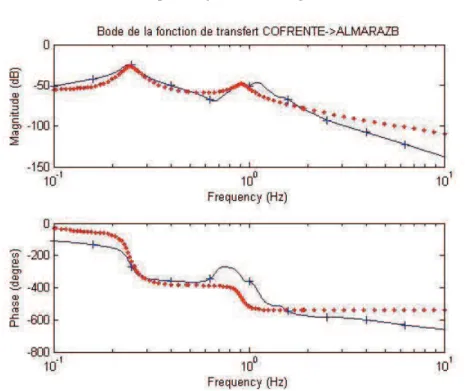
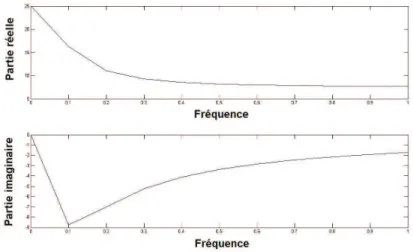
Représentation fréquentielle de H(s)ii,i=P GR : Comparaison du modèle complet (lignes bleues '-') et du modèle de contrôle (lignes rouges. Comparaison du modèle complet (lignes bleues '-') et du modèle de commande (lignes rouges.
Introduction
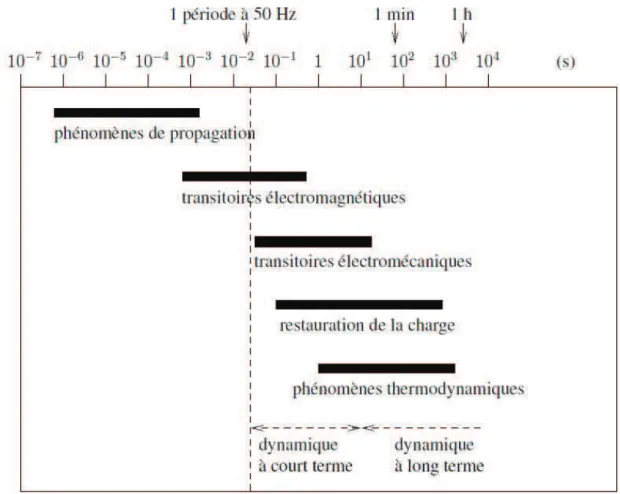
Ph´enom`enes dynamiques transitoires
La plage temporelle de ces phénomènes s’étend de la microseconde à la milliseconde. Les phénomènes de réinitialisation de charge s'étendent de quelques dixièmes de seconde à quelques dizaines de minutes.
La stabilit´e dans la th´eorie des syst`emes
Stabilit´e au sens de Lyapunov
En pratique on s'intéresse souvent à la stabilité asymptotique : un point d'équilibre est asymptotiquement stable s'il est stable et si : limkX(t)−X0k= 0 whent→. Pour les systèmes non linéaires, la stabilité est généralement locale dans le sens où seules les trajectoires qui ont leurs conditions initiales dans un certain voisinage D de X0 resteront proches ou convergeront vers le point d'équilibre.
Analyse de la stabilit´e
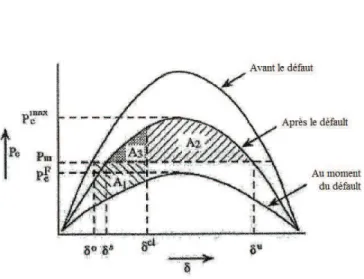
Pour que le système soit stable, l’énergie mécanique totale doit diminuer avec le temps. La masse reste dans la zone de stabilité et retrouve même son point d'équilibre stable initial car l'énergie cinétique initialement injectée se transforme grâce à l'amortisseur (diminution de l'énergie totale mécanique).

Stabilit´e des syst`emes ´electriques
V(δ, ω) est positif si et seulement si Vc ≥ Vp, c'est-à-dire si le système peut absorber l'énergie cinétique créée par l'événement (ce qui correspond à la surface A1 sur la figure 3.4). Ainsi, comme pour l'exemple mécanique donné à la section 3.3.2, le point d'équilibre est stable si le système peut absorber toute l'énergie cinétique créée par la perturbation (par défaut dans ce cas).
Analyse modale
- D´ecomposition modale de la r´eponse d’un syst`eme
- Portrait de phase
- Facteur de participation
- Modes d’oscillations ´electrom´ecaniques des grands
- Sensibilit´e d’une valeur propre par rapport `a un
- Sensibilit´e d’une valeur propre d’un syst`eme en boucle
- L’analyse modale selective
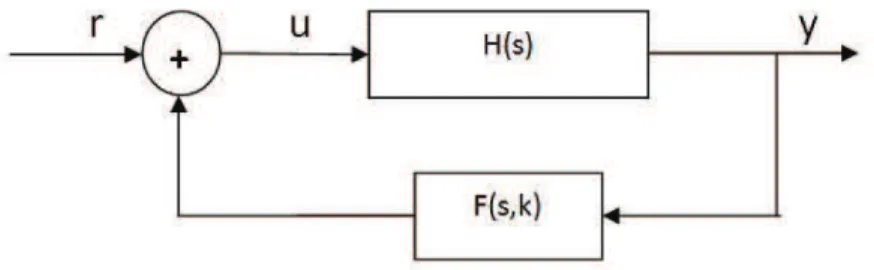
Typiquement, ce paramètre est le gain du contrôleur utilisé pour stabiliser le système en boucle fermée (système et contrôleur) en décalant la valeur propre λ0. La sensibilité de la valeur propre λi de la fonction de transfert en boucle fermée ey(s)/r(s) au gain K de la fonction de transfert du contrôleur F(s, K) est le produit de r´ esiduRy/ r, c'est-à-dire le -fonction de transfert en boucle ey(s)/r(s) correspondant à la valeur propre λ de la dérivée partielle.
Introduction
R´eduction des mod`eles dynamiques
La r´eduction dans la th´eorie des syst`emes
Il permet de séparer les variables d’état fortement contrôlées et observables de ce système des variables faiblement contrôlées et observables. En fait, les variables d'état correspondant à de grandes valeurs singulières sont les plus contrôlables et observables, tandis que les variables d'état correspondant à de petites valeurs singulières sont les moins contrôlables et observables.
R´eduction des mod`eles des syst`emes ´electriques
Dans cette section, nous passerons en revue les mesures les plus importantes pour la similarité entre les machines d'un système électrique. a) Cohérence. De nombreuses autres méthodes d'étude de la cohérence et de la distribution des générateurs ont été publiées (voir, par exemple, [1]). c) Consistance lente.

La synchronie du point de vue de la th´eorie des syst`emes
- Syst`emes g´en´eralis´es
- La synchronie exacte et la perte de la commandabilit´e . 88
- La synchronie exacte et le mode fr´equence
- La synchronie approximative et la perte de
Les modes non observables du système (M, u, y) sont donnés par les facteurs invariants de la matrice de définition de module M/[u, y]R (voir l'annexe C pour plus de définitions). détails). La synchronie exacte correspond en effet à une redondance dans le modèle d'un système.
M´ethodes de r´eduction des mod`eles dynamiques
Objectifs de la r´eduction et choix du noyau ν
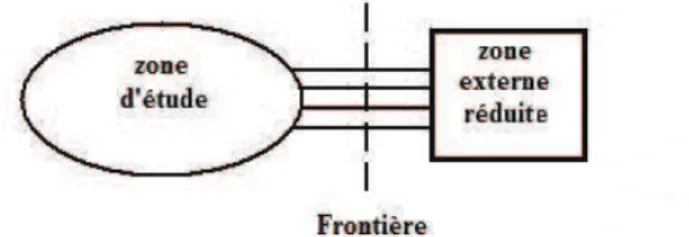
La synchronie dans cette situation représente la similitude de l'influence des générateurs de la zone extérieure sur la zone d'étude. Pmi et δi, i = 1, .., n sont les puissances mécaniques de référence et les angles de rotor des seuls générateurs de la zone d'étude.
R´eduction des mod`eles
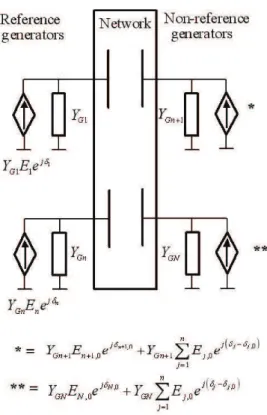
Les générateurs de la zone externe non référencée sont supprimés dans le modèle réduit et remplacés par des équivalents dynamiques sous forme d'injecteurs de fluide. La topologie de la zone externe peut également être simplifiée grâce à la technique de Ward.
Synth`ese de la proc´edure de la r´eduction
La deuxième composante I2k dans (4.37) concerne les caractéristiques supprimées des génératrices supprimées : ce sont leurs caractéristiques dynamiques compensées en fonction de la variation des angles des génératrices de référence. La figure 4.10 montre le modèle électrique des générateurs de référence et hors référence sous la forme d'un équivalent Norton.
Applications
Equivalent dynamique pour les ´etudes journali`eres de
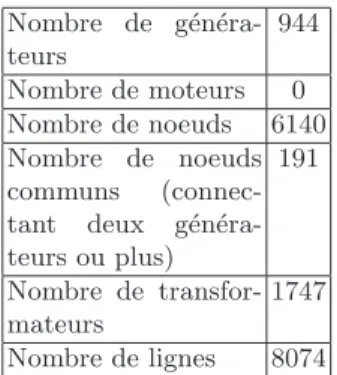
Le tableau 4.1 donne une idée de la taille de ce grand système électrique (une description plus détaillée de ce système est donnée en annexe A). Dans le tableau 4.3 nous indiquons les dimensions du modèle réduit de la zone nord-est voisine ainsi construite.
R´eduction des mod`eles dynamiques pour les ´etudes
Ces points du réseau français sont généralement surveillés en contrôle système. La réponse en vitesse de cette machine est obtenue avec le système issu de la réticulation.

R´eglage coordonn´e et robuste des param`etres des PSS
- Probl´ematique
- Approche g´en´erale
- Principe des PSS
- M´ethodologie
- Application
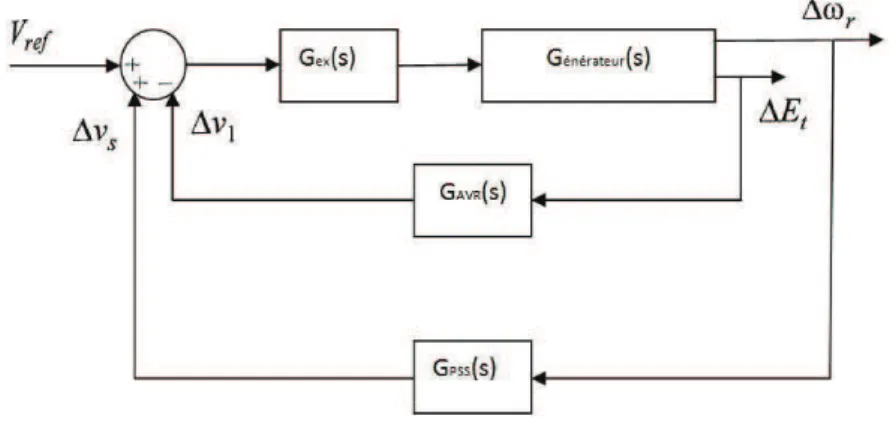
La structure de base de la plupart des PSS IEEE standard est illustrée à la figure 5.3. S(s) donne l'influence d'une perturbation du niveau de sortie sur la sortie du système.
R´eglage coordonn´e et robuste des param`etres des PSS et des
- Probl´ematique
- Approche g´en´erale
- M´ethodologie
- Validation en grande taille
Plus précisément, on se contente ici de la vérification de la coordination du réglage des paramètres du PSS et des régulateurs de vitesse. a) Validité linéaire. De plus, en utilisant les paramètres des PSS et des régulateurs de vitesse calculés selon la méthodologie proposée dans cette section, on obtient une réponse moins oscillatoire de la vitesse de la machine.
R´ecapulatif des r´esultats obtenus
Equivalence Modale Synchrone [45]) pour répondre au problème présenté ci-dessus et correspondant au besoin du partenaire industriel de ma thèse. La deuxième partie du travail rapporté ici vise à coordonner le réglage des paramètres du PSS avec des structures standards (IEEE) et des régulateurs de vitesse de plusieurs machines afin d'amortir plusieurs modes oscillatoires de natures différentes.
Possibilit´es de d´eveloppements ult´erieurs de l’´etude
Sauer, "Singular Disturbance Analysis of Large Power Systems", Electrical and Power Systems, Vol. Rouco, ”Coordinated design of multiple controllers for power system oscillation damping”, International Journal of Electrical Power and Energy Systems, Vol.23, No.7, pp.
Descriptif du syst`eme ´electrique europ´een
Analyse modale du syst`eme ´electrique europ´een
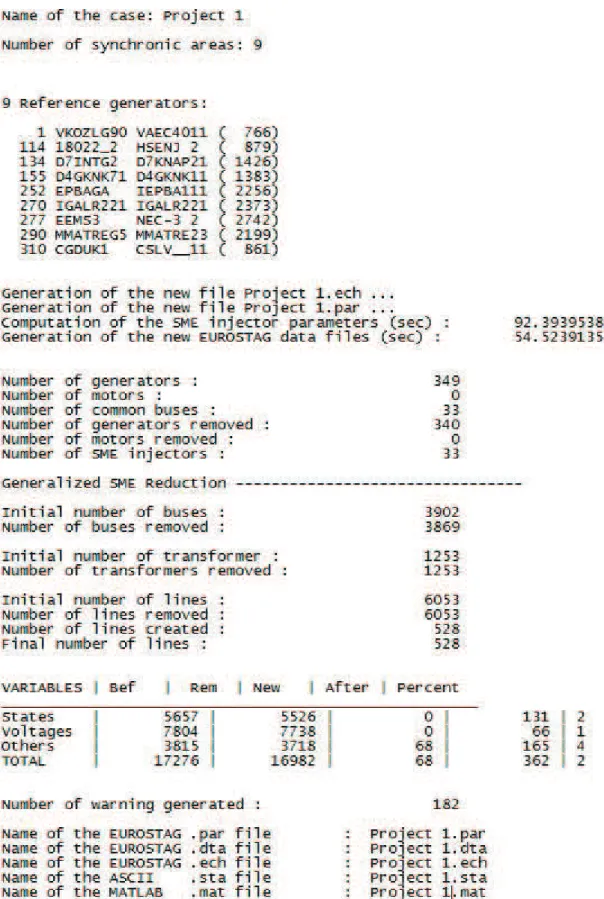
La m´ethode de r´eduction ”synchronie par rapport `a une
Extrait du fichier de sortie de la méthode de réduction de synchronie par rapport à une frontière.
Articles de journaux avec comit´es de lecture
Articles de conf´erences internationales avec comit´es de lecture
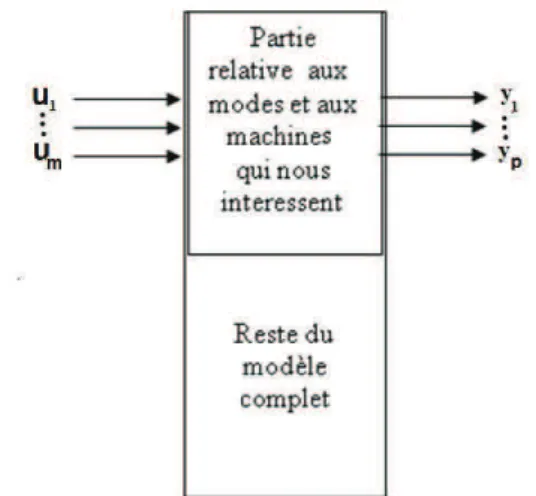
Un système d'entrées/sorties (M, u, y) est observable si et seulement si le module M/[u, y]R se réduit à zéro. Les modes inobservés du système d'entrée/sortie (M, u, y) ou les zéros du séparateur de sortie sont les racines des facteurs invariants de toute matrice qui définit M/[ u, y]R.