L'amortissement de la structure est considéré comme connu et on ne s'intéressera qu'à la modélisation des effets dissipatifs dans le fluide. Les variables que nous choisissons pour décrire le système sont le potentiel de déplacement du fluide et le déplacement de la structure.
Mod` ele r´ eduit de fluide ballotant
Cette hypothèse d'amortissement diagonal, qui consiste à considérer qu'il n'y a pas de couplage entre les états d'amortissement, est aussi appelée hypothèse de Basile. Dans le cas de groupes de modes qui ne satisfont pas au critère (2.9), il est toujours possible de considérer un modèle matriciel d'amortissement modal par blocs [7].
Equations r´ ´ eduites du syst` eme coupl´ e
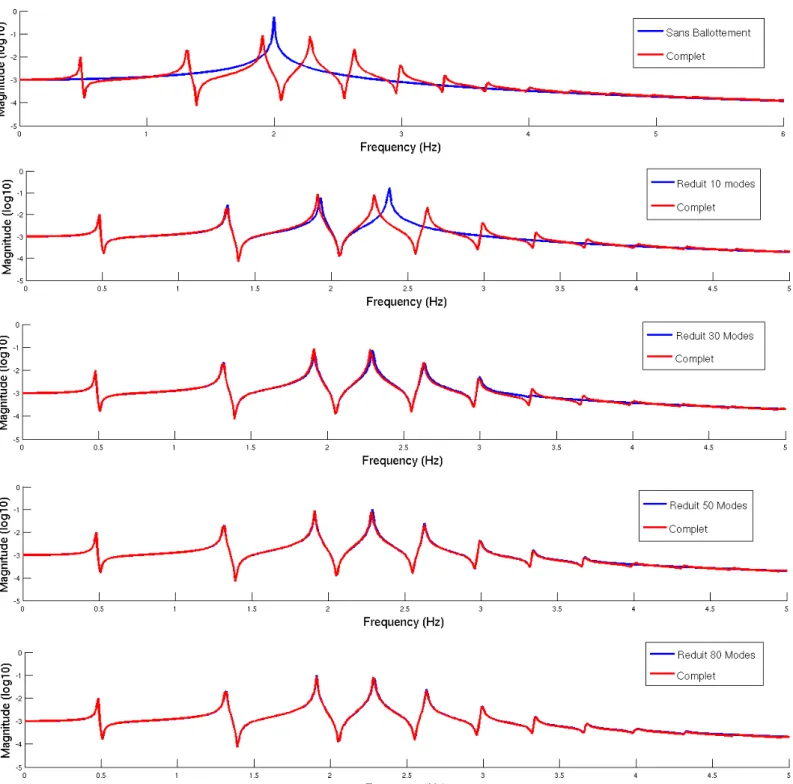
Comparaison entre mod` ele coupl´ e r´ eduit et mod` ele complet
- Transformation en un probl` eme aux valeurs propres du premier ordre 50
- Exemple de calcul des modes complexes d’une cuve axisym´ etrique . 53
- R´ eponse impulsionnelle
- Correction statique
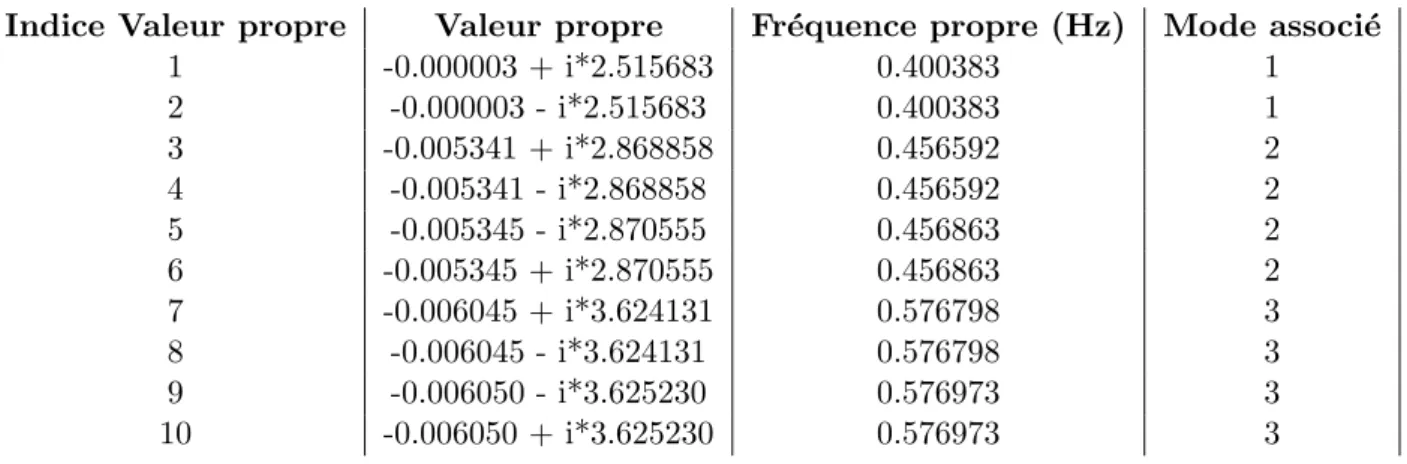
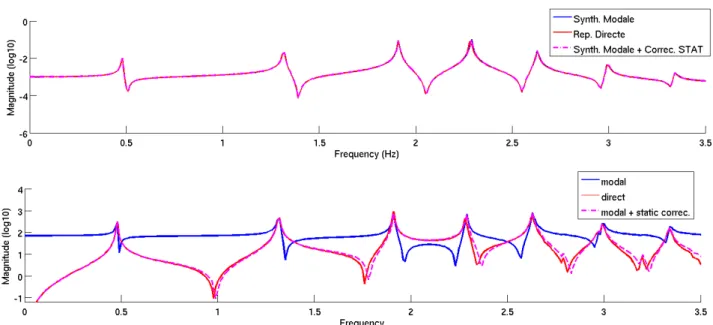
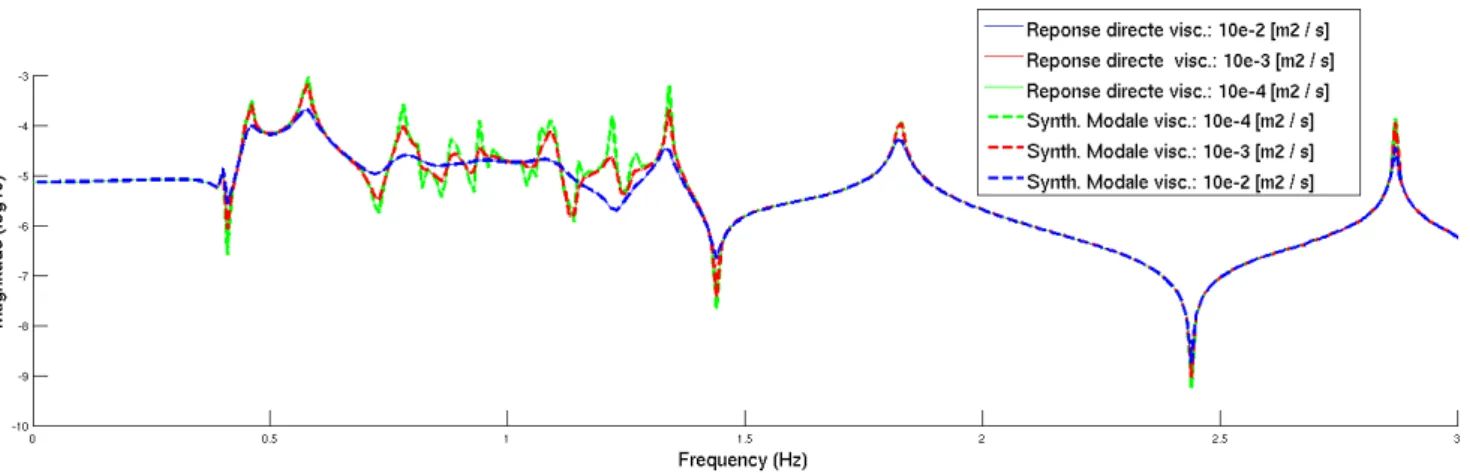
La figure 2.4 montre quelques exemples de modes couplés du système calculés à partir du modèle réduit (2.40). La réponse impulsionnelle H d'un système couplé fluide-structure, amortie en fonction de la pulsation ω (obtenue en considérant des conditions initiales nulles et une force uniforme bF) peut être écrite.

R´ eponse temporelle (lin´ earis´ ee) par synth` ese modale complexe
Recomposition de la r´ eponse du fluide
0 (3.46) On remarque ainsi que le potentiel gφi peut être reconstruit à l'aide de la décomposition (3.44) où les coordonnées généralisées gκi sont calculées à partir du problème (3.46), qui est le problème des valeurs propres transposées (2.40). En considérant le problème conservateur (1.19) et la définition de la solution ϕ∞ donnée par (2.24), nous obtenons la relation suivante concernant φ∞.
Analyse d’un exemple
Influence de la correction statique
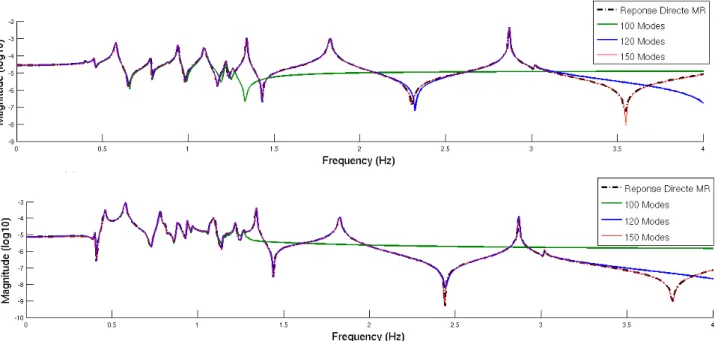
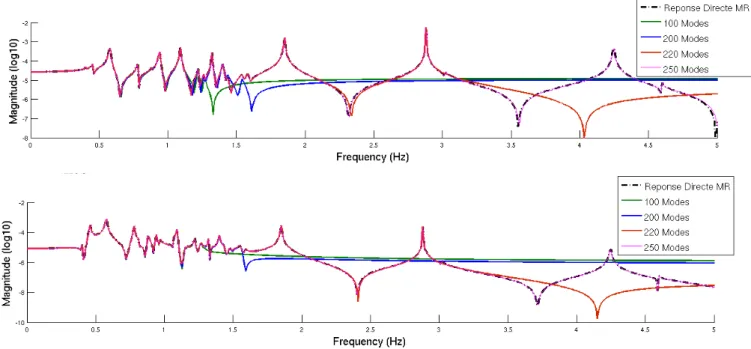
Convergence de la solution en fonction de la base modale complexe. 65
Pour bien approcher la réponse directe, il faut au moins dépasser la gamme de fréquences des modes d'atténuation. Les deux méthodes peuvent être considérées comme équivalentes en termes de résultat, les temps de calcul des modes de réponse réel et direct sont comparables à ceux des modes complexes.
R´ eponse temporelle
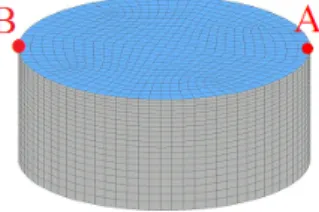
Le déplacement de la structure au point d'excitation A dans la direction radiale en haut et le potentiel de déplacement du fluide en bas. La figure 3.12 montre également l'affichage de la phase transitoire de l'excitation harmonique à une fréquence de 0,4506 Hz. Figure 3.12 - Visualisation de la déformation du fluide à plusieurs instants pour une excitation harmonique à une fréquence de 0,4506 Hz.
Amortissement visqueux dans le volume du liquide
Impl´ ementation et validation
Notations
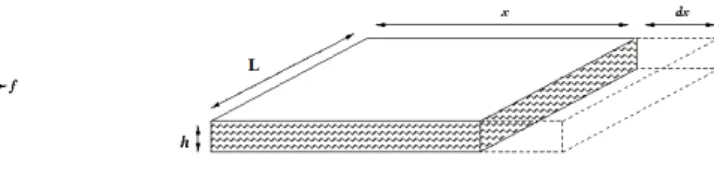
La formule de dérivation des fonctions composites permet d'exprimer le gradient de ϕ par rapport aux coordonnées physiques X∗, en fonction de son gradient par rapport aux coordonnées intrinsèques Ξ et de la matrice des dérivées partielles de la transformation (ou matrice jacobienne) T, comme on le notera DΞT. Dans le cas où T est une transformation dont l'image est une série de dimensions inférieures à 3 (courbes, surfaces) de l'espace physique, il faut exprimer sa matrice jacobienne, faire un changement de variable et se placer localement dans le repère pour l'élément (les coordonnées des nœuds de l'élément dans ce repère seront alors notées ∗loc. La matrice jacobienne3 et le gradient surfacique (ou linéaire) sont alors donnés par
La construction d'une matrice élémentaire AE nécessite de réaliser l'intégration à l'élément de référence ER en changeant la variable (4.32). ΞN[DΞT]−1[DΞT]−1T[∇ΞN]Tdet(DΞT) dΞ (4.40) – dans le cas d’éléments finis triangulaires P1 :∇ΞN, det(DΞT) et DΞT sont constants (deΞ indépendants) et le calcul effectif de AE ne nécessite pas d’intégration numérique. On peut par contre souligner qu’on aurait pu calculer ∆EiΣ d’une manière différente, en notant cela.
Nous verrons dans la section 4.3.3 que le calcul de ∇ϕi à partir de ϕi est possible, mais imprécis. En raison des discontinuités de surface entre les éléments du réseau interfacial, la notion de « normale aux nœuds » n'est pas bien définie (par opposition à la notion de normale aux éléments), rendant cette approche dépassée. On construit ainsi la matrice [∇] de l'opérateur qui permet d'obtenir de φi la valeur de son gradient en chaque nœud ∇φi. Notons cependant qu'il faudrait calculer le gradient de la norme au carré du gradient deϕi, ce qui pourrait être fait à l'aide de l'opérateur [∇] décrit précédemment.
Cas test analytique
Cas test exp´ erimental
De ces valeurs on dérive la valeur de l'amortissementξi pour chaque oscillation définie par. Comme nous l'avons noté dans la partie 4.2, la contribution de l'amortissement liée à la viscosité du fluide dans le volume du fluide est ici beaucoup plus faible. Ainsi, la valeur numérique de l'amortissement pour le premier mode correspond à une erreur d'environ 22.
Influence de l’amortissement des modes de ballottement sur la syn-
L’amortissement de la structure n’étant pas pris en compte, le potentiel de déplacement du fluide n’est pas amorti si l’on augmente la fréquence à partir de 2,5 Hz (voir Figure 4.13). Nous nous sommes ensuite concentrés sur l'étude du problème des valeurs propres quadratiques avec un opérateur d'amortissement non symétrique. Dans la deuxième partie de ce manuscrit nous nous concentrerons sur la formulation du problème conservateur, couplée à la considération des effets de capillarité.
Energie d’interface et tension superficielle
Nous présentons donc dans cette partie les phénomènes connus les plus importants liés à la présence de tension superficielle (sur l'état dynamique, mais aussi sur la configuration statique), les paramètres peuvent jouer un rôle important, les hypothèses que nous considérerons également comme leurs domaines de validité. Sur Terre, bien que la gravité domine, les forces de tension superficielle sont non nulles (cf. on se place dans un espace où la gravité devient du même ordre de grandeur que les forces de tension superficielle, la surface libre va se courber et minimiser son énergie en formant un ménisque.
Mouillage
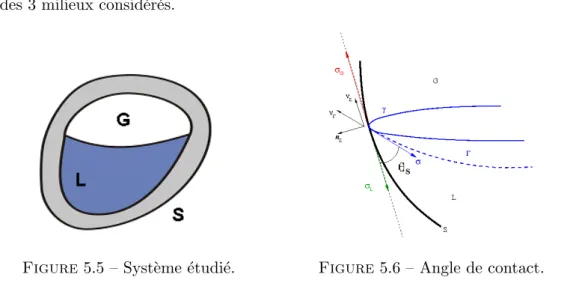
En prenant νΓ= cos(θS)νΣ+sin(θS)nΣ (voir Figure 5.2), en se projetant selon la normale nΣ on observe que le fluide exerce une force sur le solide au niveau de la triple ligne observée par fF /S et la norme αsin( θS). Si l’étude du problème du mouillage statique est bien connue, l’étude de la dynamique des triples raies sur le substrat reste complexe. Fc=α(cosθS−cosθD)νΣ (5.10) Tout d'abord, on remarque qu'un problème se pose au niveau de la ligne triple pour un liquide visqueux, où il existe deux conditions macroscopiques contradictoires.
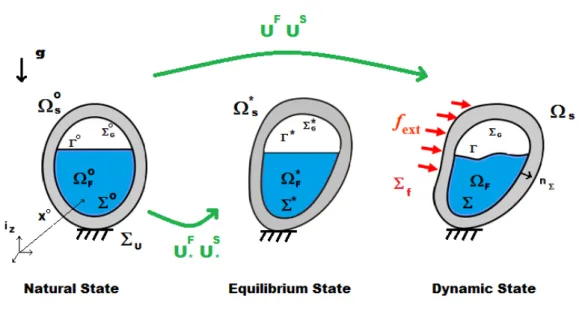
Param´ etrisation du probl` eme
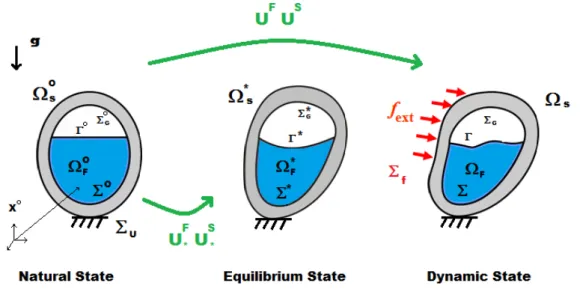
Le fluide et la structure sont définis respectivement par les champs de déplacement UF et US. Ces grandeurs sont dans un premier temps non linéaires mais dans un deuxième temps nous supposerons que l'état dynamique reste proche de l'état d'équilibre afin de pouvoir linéariser les grandeurs équations dynamiques du système autour de cet état d'équilibre. Comme le montre la figure 5.7, le volume de fluide ΩF est délimité par les interfaces Γ et Σ et l'intersection de ces deux interfaces est notée γ.
Principe de Moindre Action
- Incompressibilit´ e
- Energie potentielle de pesanteur du fluide
- Energie potentielle ´ ´ elastique de la structure
- Energies surfaciques
- Couplage Fluide-Structure
De même, l'expression δ[f]∗(δu) désigne la dérivée directionnelle de la fonction f dans la direction de δu dans la configuration d'équilibre. Nous considérerons l'énergie potentielle élastique de la structure Eelas, le résultat de la variation de cette énergie, exprimée autour de Ω∗S dans la direction δuS, est classiquement donné par :. 6.18). AS désigne la surface de S et αS est la densité d'énergie de surface de la surface, qui est supposée constante.
Etude statique ´
Etat d’´ ´ equilibre du fluide
Sachant que P = PZ=0 −ρFg Z∗, où PZ=0 considère la pression de l'origine de l'axe Z, on a donc la relation suivante. De même, le multiplicateur Mγ∗ représente l'amplitude de la force statique appliquée à γ∗ et égale à l'amplitude defF /S introduite dans la section 5.1.2. A partir de l'équation (6.32) et des résultats obtenus dans la section 5.1.2 concernant l'équilibre des forces sur le bordγ∗ on constate que le champδuF n'agit pas dans la directiontγ (il n'y a pas de variation de l'énergie potentielle du système ).
Etat d’´ ´ equilibre de la structure
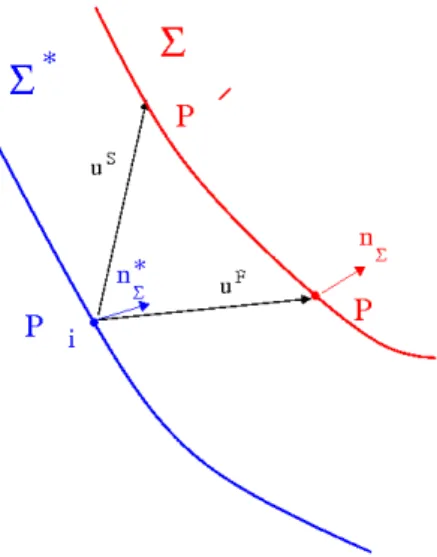
La condition aux limites sur l’interface Σ est donnée par l’opérateur CΣ et la relation (6.28) que l’on souhaite linéariser. Nous linéarisons cette expression en considérant les petits déplacements de fluide autour de l'interface Σ∗, ce qui signifie que nous considérons que l'interface Σ∗ suit les particules fluides (voir Fig. 7.1), nous aurons donc. Puisque nous considérons ici que l’interface Σ suit le mouvement des particules fluides, nous utiliserons la notation µF pour définir cette fluctuation de pression.
Expression des multiplicateurs de Lagrange (phase B)
En substituant (7.36) dans (7.35), nous obtenons l'expression de la variable µF en considérant des fonctions de test nulles sur Γ∗ et γ∗. En effet, nous supposons dans cette étude que l'angle de contact est constant et que la variation d'amplitude de la force linéaire fF /S normale à l'interface est nulle. La prise en compte de la variation de l’angle de contact dans l’étude dynamique y conduirait.
Equation Fluide
Nous introduisons l'espace d'admissibilité Cϕ des fonctions assez régulières ϕ et δϕ, et l'espace Cϕ∗ des fonctions ϕ en vérifiant la condition d'unicité présentée par la forme linéaire :.
Equation Structure
Synth` ese (phase C)
En effet, si l’on applique la forme linéaire à la relation (7.67), on peut déterminer la constante de manière unique. Ainsi (7.56) peut être écrit comme un ensemble de deux équations variationnelles distinctes obtenues en prenant d’abord les fonctions de test δϕ dans l’espace Cϕ∗. Enfin, nous introduisons KF et KS, les opérateurs de rigidité des fluides et des structures définis par .
Comparaisons
Dans le cas o` u les effets de la capillarit´ e sont n´ egligeables
En nous plaçant dans les mêmes conditions que pour [91], nous supposons que les effets de biais sont définis sur la surface Σ0 (les états initial et statique sont combinés) et nous considérerons Z∗'Z0. La surface libre est ici plane (n∗Γ=iz) et en choisissant l'origine du repère au niveau de la surface libre à l'état statique on a Z0 = 0 et donc Λ Les opérateurs KFHyde et KSHyd sont obtenus pour éliminer le expression de capillarité dans les expressions de KF (7.73) et KS (7.74). Dans l'équation (b) du problème (7.78), les champs suFΓ et δuFΓ sont systématiquement projetés selon iz, et il suffit de remplacer uFΓ ·iz par η et δuFΓ ·iz par δη pour trouver une formulation dans ( uS,η,ϕ , π.
Dans le cas o` u les d´ eformations de la structure sont n´ egligeables
Equations locales (probl` ´ eme ouvert)
Nous introduisons ensuite la fonction f et la distribution de Dirac δγ qui passe par tous les points de Σ∗γ.
Formulation matricielle
Notons d’abord que dans le problème (7.95) ϕ et δϕ appartiennent à Cϕ∗ et il faut encore tenir compte de cette contrainte en imposant une relation linéaire entre les composantes de Φ. Puisque cette relation peut être arbitraire, nous choisissons de supprimer le premier degré de liberté et d’écrire Φ2 le vecteur que nous avons tronqué. 7.99) où u est le vecteur des inconnues obtenu après réduction des degrés de liberté en tenant compte de cette relation2. En pratique, cette relation est prise en compte via des relations linéaires imposées aux degrés de liberté deuFΓetuS.
Sym´ etrisation
Comme nous avons pu le voir dans la section 5.1.2, lorsque la ligne triple se déplace, l'angle de contact dynamique θD que l'on observe varie. Si l'on considère le cas particulier d'un problème bidimensionnel et pour de petites variations de l'angle dynamique autour d'une valeur statique égale à π/2, le taux de mouillage s 'writevm =∂η/∂t et l'angle de contact θd−π/ 2 '∂η/∂ x(η est la hauteur de la surface libre et x est la coordonnée normale au mur). A partir des équations (A.2) et (A.4), nous pouvons également donner une expression de ξi pour l'atténuation de Rayleigh et Caughey en fonction de a,b etcj.
En plus de l'équation (C.1), nous considérons l'équation de conservation de masse pour un fluide incompressible écrite. Fre représente le gradient de la distorsion volumétrique défini par : F =DX0X = ∂X. D.2) La variation du volume V dans chaque direction δuva peut donc s'écrire.
![Figure 8.1 – Valeurs exp´ erimentales de l’angle dynamique en fonction de la vitesse nor- nor-malis´ ee de d´ eplacement de la ligne de contact v m (extrait de [13])](https://thumb-eu.123doks.com/thumbv2/1bibliocom/463189.69003/146.893.215.636.530.867/figure-valeurs-erimentales-dynamique-fonction-vitesse-eplacement-contact.webp)