Universidade Federal de Minas Gerais
Centro de Pesquisa e Desenvolvimento em Engenharia Eletrica
Programa de Pos-Graduac~ao em Engenharia Eletrica
Estimac~ao Recursiva de
Caractersticas Estaticas N~ao
Lineares Utilizando Modelos
Polinomiais NARMAX
Ceclia Carabetti da Silveira Cassini
Dissertac~ao submetida a banca examinadora designada pelo Colegiado
do Programa de Pos-Graduac~ao em Engenharia Eletrica da
Universi-dade Federal de Minas Gerais como parte dos requisitos necessarios a
obtenc~ao do grau de Mestre em Engenharia Eletrica.
Resumo
Diversos sistemas din^amicos em Engenharia possuem caractersticas estaticas n~ao lineares bem denidas. Tais caractersticas denem o ganho do sistema que, nesses casos, n~ao e constante e muitas vezes varia ao longo do tempo.
O objetivo deste trabalho e a estima c~ao recursiva das caractersticas estaticas n~ao lineares de um sistema real utilizando modelos polinomiais NARMAX de forma a permitir quanticar mudan cas temporais em tais car-actersticas.
A m de testar algumas ideias desenvolvidas neste trabalho, utilizou-se um sistema termico simples. A caracterstica estatica n~ao linear deste sistema pode ser facilmente obtida atraves de testes estaticos e pode ser utilizada para validar os resultados.
Primeiramente, foram identicados modelos com termos lineares, quadraticos e cubicos, utilizando as seguintes tecnicas para detec c~ao de estrutura de mod-elos: analise de agrupamentos de termos, algoritmo baseado num criterio de redu c~ao de erro e criterios de informa c~ao. Os modelos identicados foram validados com base em testes estatsticos, din^amicos e na capacidade de recu-pera c~ao da curva estatica, ou seja, foram considerados aqueles modelos que eram validos tanto dinamicamente quanto estaticamente.
ii
Abstract
Many real dynamical systems have well-dened nonlinear static charac-teristic curves. The system gain is, in general, determined by such curves and varies both with the operating point and in time.
The main objective of this work is to recursively estimate nonlinear static characteristic curves of a real system using polynomial NARMAX models. In this way it is hoped that temporal variations of such curves can be quantied. In order to test some of the ideas developed in this work, a simple thermal system was used. The nonlinear static characteristic curves of this system can be easily obtained from static testing thus suggesting its use to validate the results.
Firstly, models with linear, quadratic and cubic terms were identied. In order to determine the model structures the following complimentary ap-proaches were used: term cluster analysis, the Error Reduction Ratio (ERR) criterion and information criteria. The identied models were validated sta-tistically and dynamically. Another aspect that was taken into account in choosing the best models was how well the nonlinear static characteristic was represented in each model. Ten models were described and compared using these criteria.
Agradecimentos
A Deus por tudo.
A meus pais pela presen ca constante.
Ao professor Luis Aguirre pela orienta c~ao, sabedoria, incentivo e con-an ca dedicada aos alunos.
Ao professor Walmir pela colabora c~ao em emprestimos de equipamentos. Aos colegas do grupo MACSIN (Modelagem, Analise e Controle de Sis-temas N~ao Lineares) e do CPDEE (Centro de Pesquisa e Desenvolvimento em Engenharia Eletrica) pelo auxlio e amizade.
Resumo
i
Abstract
ii
Agradecimentos
iii
Nomenclatura
xii
1 Introduc~ao
1
1.1 Identica c~ao de Sistemas N~ao Lineares . . . 3
1.2 Apresenta c~ao do Trabalho . . . 4
2 Identicac~ao de Sistemas
6
2.1 Introdu c~ao . . . 62.2 Identica c~ao . . . 7
2.3 Experimenta c~ao . . . 9
2.4 Detec c~ao de N~ao Linearidades . . . 11
2.4.1 Testes no Domnio do Tempo . . . 11
2.4.2 Metodo de Correla c~ao Cruzada N~ao Linear . . . 11
2.4.3 Metodo de Autocorrela c~ao N~ao Linear . . . 12
2.5 Representa c~oes para Sistemas N~ao Lineares . . . 13
2.6 Modelo NARMAX . . . 13
2.7 Estima c~ao de Par^ametros . . . 16
2.8 Regressores Ortogonais . . . 17
2.8.1 Metodo Classico de Ortogonaliza c~ao de Gram-Schmidt 18 2.8.2 Transforma c~ao de Householder . . . 20
2.9 Detec c~ao de Estrutura . . . 21
2.9.1 Agrupamentos de Termos . . . 22
2.9.2 A Taxa de Redu c~ao de Erro . . . 24
2.9.4 Composi c~ao dos Metodos Citados para Detectar a
Es-trutura do Modelo . . . 27
2.10 RedesMulti-LayerPerceptron . . . 28
2.11 Outras Representa c~oes para Sistemas N~ao Lineares . . . 33
2.12 Valida c~ao do Modelo . . . 35
2.12.1 Valida c~ao Estatstica . . . 35
2.12.2 Valida c~ao Din^amica . . . 37
2.13 Algoritmo Recursivo com Fator de Esquecimento . . . 38
2.14 Comentarios . . . 41
3 Identicac~ao em Batelada
43
3.1 Introdu c~ao . . . 433.2 Descri c~ao do Sistema . . . 43
3.3 Testes . . . 46
3.3.1 Testes em Degrau . . . 46
3.3.2 Testes Estaticos . . . 46
3.3.3 Testes Din^amicos . . . 48
3.4 Detec c~ao de N~ao Linearidades . . . 48
3.5 Taxa de Amostragem . . . 54
3.6 Analise de Agrupamentos de Termos e Coecientes de Agru-pamentos . . . 57
3.7 Uso de Criterios de Informa c~ao . . . 63
3.8 Modelos Identicados em Batelada . . . 64
3.8.1 Modelo Linear . . . 65
3.8.2 Modelo com Grau de N~ao Linearidade Dois . . . 69
3.8.3 Modelo com Grau de N~ao Linearidade Tr^es . . . 77
3.8.4 Compara c~ao entre os Modelos Apresentados . . . 84
3.9 Conclus~oes . . . 89
4 Estimac~ao de N~ao Linearidades Estaticas
91
4.1 Introdu c~ao . . . 914.2 Pontos Fixos em Sistemas Aut^onomos . . . 92
4.3 Pontos Fixos em Sistemas N~ao Aut^onomos . . . 94
4.4 Estabilidade de Pontos Fixos . . . 95
4.5 Estima c~ao de N~ao Linearidades Estaticas Utilizando Modelos Polinomiais . . . 97
4.5.1 Estima c~ao de Caractersticas Estaticas a partir de Modelos Lineares . . . 97
vi
4.5.3 Estima c~ao de Caractersticas Estaticas a partir de Modelos
Cubicos . . . 104
4.6 Compara c~ao entre as Caractersticas Estaticas . . . 111
4.7 Conclus~oes . . . 112
5 Identicac~ao Recursiva 114 5.1 Introdu c~ao . . . 114
5.2 Teste Din^amico Variavel . . . 114
5.3 Identica c~ao Recursiva . . . 116
5.3.1 Modelos com Um Ponto Fixo . . . 116
5.3.2 Modelos com Dois Pontos Fixos . . . 125
5.4 Conclus~oes . . . 131
Conclus~ao 132
2.1 Estrutura generica de uma redeFeedforward. . . 28
2.2 Diagrama de blocos ilustrando a estima c~ao recursiva. . . 40
3.1 Sistema . . . 44
3.2 Diagrama de blocos do sistema. . . 45
3.3 Caracterstica estatica;Teste 02. . . 47
3.4 Caracterstica estatica;Teste 07. . . 47
3.5 Caracterstica estatica;Teste 08. . . 48
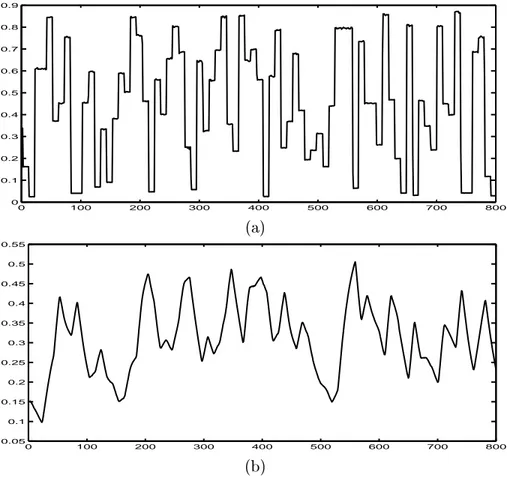
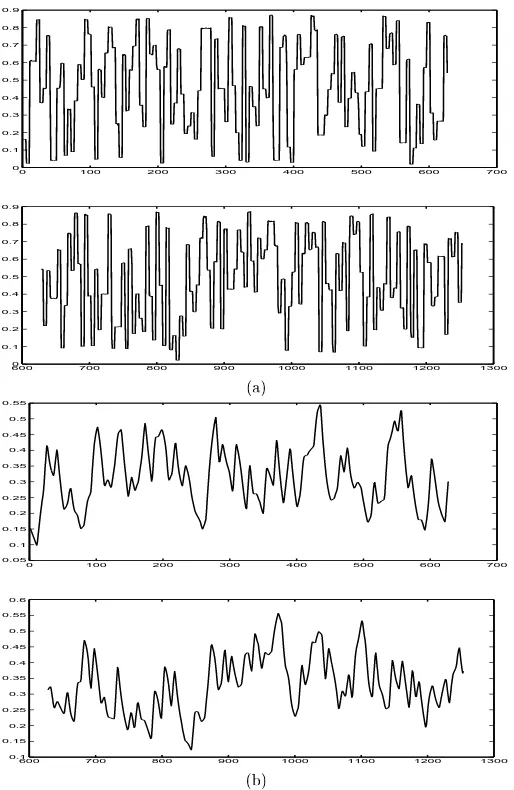
3.6 Massa de dados<din2> . . . 49
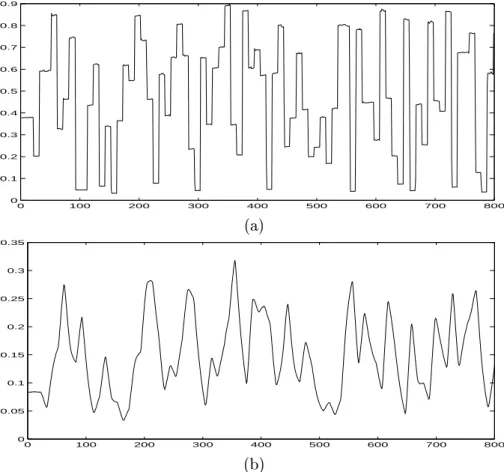
3.7 Massa de dados<din3> . . . 50
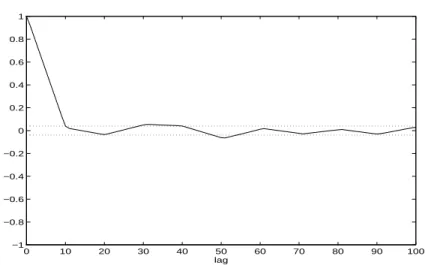
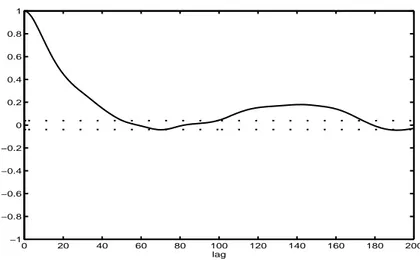
3.8 Autocorrela c~ao do sinal de entrada de<din2>. . . 51
3.9 Autocorrela c~ao do sinal de entrada de<din3>. . . 51
3.10 Autocorrela c~ao n~ao linear do sinal de sada de<din2>. . . . 52
3.11 Autocorrela c~ao n~ao linear do sinal de sada de<din3>. . . . 53
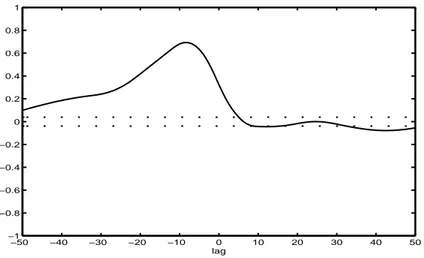
3.12 Correla c~ao cruzada n~ao linear do sinal de sada da massa de dados<din2>. . . 53
3.13 Correla c~ao cruzada n~ao linear do sinal de sada da massa de dados<din3>. . . 54
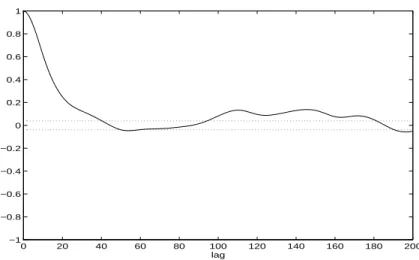
3.14 Autocorrela c~ao linear do sinal de sada de <din2>utilizada para determinar a taxa de amostragem. . . 55
3.15 Autocorrela c~ao n~ao linear do sinal de sada de <din2 > uti-lizada para determinar a taxa de amostragem. . . 55
3.16 Autocorrela c~ao linear do sinal de sada de <din3>utilizada para determinar a taxa de amostragem. . . 56
3.17 Autocorrela c~ao n~ao linear do sinal de sada de <din3 > uti-lizada para determinar a taxa de amostragem. . . 56
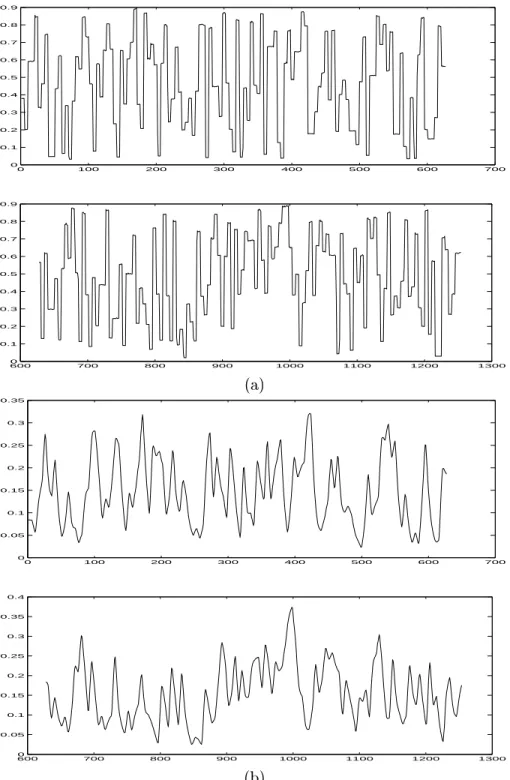
3.18 Massa de dados<din2> dizimada. . . 58
3.19 Massa de dados<din3> dizimada. . . 59
viii
3.20 Varia c~oes dos coecientes de agrupamentos para<din2>. . 61
3.21 Varia c~oes dos coecientes de agrupamentos para<din3>. . 62
3.22 Criterio AIC - massa de dados<din2>. . . 63
3.23 Criterio AIC - massa de dados<din3>. . . 64
3.24 Valida c~ao din^amica para o modelo linear (3.6). . . 65
3.25 Valida c~ao estatstica para o modelo linear (3.6). . . 66
3.26 Valida c~ao din^amica para o modelo linear (3.7). . . 67
3.27 Valida c~ao estatstica para o modelo linear (3.7). . . 68
3.28 Valida c~ao din^amica para o modelo n~ao linear (3.8). . . 69
3.29 Valida c~ao estatstica para o modelo n~ao linear (3.8). . . 70
3.30 Valida c~ao din^amica para o modelo n~ao linear (3.9). . . 71
3.31 Valida c~ao estatstica para o modelo n~ao linear (3.9). . . 72
3.32 Valida c~ao din^amica para o modelo n~ao linear (3.10). . . 73
3.33 Valida c~ao estatstica para o modelo n~ao linear (3.10). . . 74
3.34 Valida c~ao din^amica para o modelo n~ao linear (3.11). . . 75
3.35 Valida c~ao estatstica para o modelo n~ao linear (3.11). . . 76
3.36 Valida c~ao din^amica para o modelo n~ao linear (3.12). . . 78
3.37 Valida c~ao estatstica para o modelo n~ao linear (3.12). . . 79
3.38 Valida c~ao din^amica para o modelo n~ao linear (3.13). . . 80
3.39 Valida c~ao estatstica para o modelo n~ao linear (3.13). . . 81
3.40 Valida c~ao din^amica para o modelo n~ao linear (3.14). . . 82
3.41 Valida c~ao estatstica para o modelo n~ao linear (3.14). . . 83
3.42 Valida c~ao din^amica para o modelo n~ao linear (3.15). . . 84
3.43 Valida c~ao estatstica para o modelo n~ao linear (3.15). . . 85
4.1 Caracterstica estatica obtida a partir do modelo (3.6). . . 98
4.2 Caracterstica estatica obtida a partir do modelo (3.7). . . 99
4.3 Caracterstica estatica obtida a partir do modelo (3.8) em rela c~ao ao ponto xo 1. . . 100
4.4 Caracterstica estatica obtida a partir do modelo (3.8) em rela c~ao ao ponto xo 2. . . 100
4.5 Caracterstica estatica obtida a partir do modelo (3.9) para o ponto xo 1. . . 101
4.6 Caracterstica estatica obtida a partir do modelo (3.9) para o ponto xo 2. . . 101
4.7 Caracterstica estatica obtida a partir do modelo (3.10). . . . 103
4.8 Caracterstica estatica obtida a partir do modelo (3.11). . . . 103
4.10 Caracterstica estatica obtida a partir do modelo (3.12) para o ponto xo 2. . . 105 4.11 Caracterstica estatica obtida a partir do modelo (3.13) para
o ponto xo 1. . . 106 4.12 Caracterstica estatica obtida a partir do modelo (3.13) para
o ponto xo 2. . . 107 4.13 Caracterstica estatica obtida a partir do modelo (3.13) para
o ponto xo 3. . . 107 4.14 Caracterstica estatica obtida a partir do modelo (3.14) para
o ponto xo 1. . . 108 4.15 Caracterstica estatica obtida a partir do modelo (3.14) para
o ponto xo 2. . . 109 4.16 Caracterstica estatica obtida a partir do modelo (3.15) para
o ponto xo 1. . . 109 4.17 Caracterstica estatica obtida a partir do modelo (3.15) para
o ponto xo 2. . . 110 5.1 Massa de dados<din4>. . . 115
5.2 Autocorrela c~ao do sinal de entrada de<din4>. . . 116
5.3 Autocorrela c~ao linear (2.1) do sinal de sada de < din4 >
utilizada para determinar a taxa de amostragem. . . 117 5.4 Autocorrela c~ao n~ao linear (2.2) do sinal de sada de<din4>
utilizada para determinar a taxa de amostragem. . . 118 5.5 Varia c~oes dos coecientes de agrupamentos de (5.1). . . 120 5.6 Varia c~oes dos par^ametros da estrutura (5.1). . . 121 5.7 Vista A - Caracterstica estatica obtida a partir da estrutura
(5.1) utilizando algoritmo recursivo. . . 122 5.8 Vista B - Caracterstica estatica obtida a partir da estrutura
(5.1) utilizando algoritmo recursivo. . . 123 5.9 Compara c~ao entre a caracterstica estatica obtida a partir da
estrutura (5.1) e a partir dos testes estaticos. . . 124 5.10 Varia c~oes dos coecientes de agrupamentos da estrutura (5.2). 126 5.11 Varia c~oes dos par^ametros do modelo recursivo (5.2). . . 127 5.12 Vista A - Caracterstica estatica obtida para o ponto xo
estavel, utilizando algoritmo recursivo a partir da estrutura (5.2). . . 128 5.13 Vista B - Caracterstica estatica obtida para o ponto xo
x
3.1 Tabela comparativa entre os modelos apresentados em rela c~ao a ordem do modelo, atraso maximo em u, grau de n~ao
lin-earidade, numero de termos de processo, numero de termos candidatos e valida c~oes estatstica e din^amica. . . 87 3.2 Tabela comparativa entre os modelos apresentados ilustrando
os agrupamentos candidatos ao modelo e os selecionados. . . 88 4.1 Tabela comparativa entre os modelos obtidos no captulo
an-terior, em rela c~ao ao numero de pontos xos e eci^encia na estima c~ao da caracterstica estatica n~ao linear. . . 111 5.1 Inicializa c~ao dos par^ametros do modelo (5.1). . . 119 5.2 Inicializa c~ao dos par^ametros do modelo (5.2). . . 125
Nomenclatura
Siglas
AIC Akaike Information Criterion
ARMAX AutoRegressive Moving Average with eXogenous inputs
HNM Hybrid Neural Model
NARMAX Nonlinear AutoRegressive Moving Average with eXogenous inputs
NARX Nonlinear AutoRegressive with eXogenous inputs
RBF Radial Basis Function
RMSE Root Mean Square Error
RNA Articial Neural Network
Variaveis
A Matriz triangular superior utilizada no processo de
ortogonaliza c~ao de Gram-Schmidt
b h
j Termo de polariza c~ao do
j-esimo neur^onio da camada
intermediaria de uma RNA Feedforward
b o
i Termo de polariza c~ao do
i-esimo neur^onio da camada de
sada de uma RNA Feedforward
D Matriz diagonal utilizada no processo de ortogonaliza c~ao
de Gram-Schmidt
e(k) Rudo presente no sistema f() Fun c~ao n~ao linear
g Vetor de par^ametros auxiliar utilizado no processo de
ortogonaliza c~ao de Gram-Schmidt
G
k Matriz de ganho para ajuste de par^ametros no
algoritmo recursivo
J
Fun c~ao custol
Grau de n~ao linearidade de um modelo polinomial NARMAXM
Numero de termos candidatos a um modelo polinomial NARMAXm
l Grau de n~ao linearidade de termos de um modelopolinomial NARMAX
n
Numero de nodos da camada intermediaria de uma RNAFeedforward
N
Numero de dados experimentaisn
e Atraso maximo nos termos de rudon
n Numero de termos de rudon
p Numero de termos de processon
r Numero de regressores candidatos a um modelo polinomialNARX
N
r Numero de entradas aplicadas aoj
-esimo neur^onio dacamada intermediaria de uma RNA Feedforward
n
u Atraso maximo nos termos referentes a entrada do sisteman
y Atraso maximo nos termos referentes a sada do sisteman
Numero de par^ametros de um modelo polinomialNARMAX
p
Ordem do fator emy
no termo de graum
lP Matriz de regressores ortogonal
P
k Matriz de covari^ancia do estimador para a itera c~ao
k
~P Matriz de regressores modicada utilizada na
transforma c~ao de Householder
R Matriz triangular superior utilizada na transforma c~ao de
Householder
T
s Perodo de amostragem utilizado para detec c~ao deestrutura e estima c~ao de par^ametros
T
ss Perodo de amostragem utilizado para coleta de dadosexperimentais
u Vetor composto pelos valores medidos da variavel de
entrada
v
j Soma ponderada para oj
-esimo neur^onio da camadaintermediaria
v
k Inova c~ao na itera c~aok
w
hji Peso entre
i
-esimo nodo da camada de entrada exiv
Feedforward
w
oj Peso entre nodos da camada intermediaria e da camada de sada de uma RNA Feedforwardw
i Regressor auxiliar utilizado no processo deortogonaliza c~ao de Gram-Schimidt
x
i Regressores do modelo NARMAX/ entradas da RNAy(
k
) Vetor composto pelos valores das variaveis de sada noinstante
k
y Vetor composto pelos valores medidos da variavel de
sada
y Localiza c~ao de ponto xo
^
y
(k
) Predi c~ao de um passo a frente no instantek
Vetor de par^ametros a estimar
^
pml(n
yn
u) Par^ametro estimado, onde os subndices indicam o tipode termo e os argumentos os respectivos atrasos
(k
) Resduo no instantek
ypuml;p Coeciente do agrupamento ypuml;p
m Constante utilizada para determinar o perodo deamostragem
T
s Valor crtico utilizado para determinar o numero de graus de liberdade para o criterio AIC y0y0 Fun c~ao de autocorrela c~ao linear do sinal de sada y2 0y2
0 Fun c~ao de autocorrela c~ao n~ao linear do sinal de sada
Agrupamento de termos do mesmo tipo
Operadores
E
] Esperan ca matematicaf
m Derivada de ordemm
da fun c~aof
2(A modelagem de sistemas e uma tarefa de vital import^ancia para o desen-volvimento da ci^encia e da tecnologia. Modelos de sistemas din^amicos t^em aplica c~oes nas mais diversas areas, tais como: engenharia, economia, medic-ina, ecologia e em algumas areas sociais. A utiliza c~ao de um modelo para representar um determinado sistema, pode estar relacionada com os mais diversos objetivos, tais como: compreender certas din^amicas do processo estudado, predizer o comportamento do sistema sob diversas condi c~oes de opera c~ao, analisar e projetar controladores, estimar variaveis do processo que n~ao podem ser medidas diretamente, otimizar o comportamento do sis-tema, permitir detec c~ao eciente de falhas no sissis-tema, permitir o estudo do sistema em regi~oes de opera c~ao despendiosas ou problematicas no sistema re-al, permitindo um treinamento de opera c~ao seguro e eciente (Matko et al., 1992).
Dentre os tipos de modelos utilizados para representar sistemas fsicos, pode-se citar os modelos fsicos, os mentais, os gracos e os matematicos ou analticos. Os modelos fsicos podem ser prototipos ou modelos analogos, por exemplo, ratos s~ao \modelos" analogos aos humanos, podendo, em al-gumas situa c~oes, ser utilizados para testar novos medicamentos. Estes tipos de modelos s~ao, na maioria dos casos, obtidos a longo prazo e com custo elevado. Os modelos mentais s~ao de caracter intuitivo, existindo, portanto, no cerebro humano. Tais modelos s~ao imprecisos, alem de dicultarem a co-munica c~ao ou passagem de informa c~ao a outras pessoas. Os modelos gracos t^em como desvantagem o fato de ser extremamente difcil obter informa c~oes do sistema atraves dos mesmos. Por outro lado, os modelos matematicos s~ao faceis de serem manipulados e seu custo e relativamente baixo. Alem de apresentar outras vantagens como concis~ao e aus^encia de ambiguidade na
1 Introduc ~
ao 2
interpreta c~ao. Desta forma, os modelos matematicos s~ao os mais comumente utilizados (Matko et al., 1992).
Um modelo matematico pode ser denido como um mapeamento das rela c~oes das variaveis fsicas do sistema em uma estrutura matematica cor-respondente. Quando o mapeamento so considera o sistema em regime per-manente, o modelo tem um carater estatico e e representado por equa c~oes algebricas. Por outro lado, quando o mapeamento inclui a resposta tran-sitoria, o modelo matematico e dito din^amico, sendo descrito por equa c~oes diferenciais (Matko et al., 1992) ou equa c~oes de diferen cas.
Existem diversas maneiras de modelar um sistema. Pode-se citar a mod-elagem pela fsica do processo e a modmod-elagem atraves de tecnicas de identi-ca c~ao de sistemas (Norton, 1986! Ljung, 1987! S"oderstr"om and Stoiidenti-ca, 1989). A modelagem pela fsica consiste na determina c~ao de equa c~oes baseadas na fsica do processo, exigindo um conhecimento detalhado do mesmo, o que torna difcil algumas vezes sua aplica c~ao. A identica c~ao, por outro lado, determina o modelo atraves de dados de entrada e sada do sistema, n~ao exigindo conhecimento previo do mesmo (identica c~ao caixa preta) (Sj"oberg et al., 1995), embora tal conhecimento possa ser utilizado, quando disponvel, para melhorar a qualidade dos modelos identicados (identica c~ao caixa cin-za) (Lindskog and Ljung, 1994).
Um aspecto importante da modelagem atraves da fsica do processo e que a mesma estrutura de modelo pode ser utilizada para sistemas similares, apenas se reestimando os par^ametros do modelo (Matko et al., 1992). A identica c~ao, por outro lado, permite a modelagem de sistemas complexos ou ate mesmo, de sistemas n~ao claramente denidos (Norton, 1986).
A m de conseguir um modelo que melhor atenda aos objetivos iniciais, os dois tipos de modelagem podem ser realizados em conjunto, ou seja, pode-se utilizar conhecimentoa priori do processo para auxiliar na determina c~ao do
modelo, caracterizando um procedimento de identica c~ao em caixa cinza. Ha varios trabalhos na literatura utilizando tal procedimento, podendo ser men-cionados alguns. Em (Cubillos et al., 1996) utilizou-se uma estrutura de RNA (Rede Neural Articial) acoplada as equa c~oes de balan co de transfer^encia de massa e energia para identicar um modelo para o sistema. O desempenho obtido com a identica c~ao em caixa cinza, utilizando uma estrutura hbrida foi comparado com o obtido atraves da identica c~ao em caixa preta, utilizan-do somente a RNA. Os resultautilizan-dos obtiutilizan-dos com o modelo hbriutilizan-do foram supe-riores aos obtidos com a RNA em caixa preta. Em (Jacome, 1996) utilizou-se conhecimentoa priori da forma das n~ao linearidades estaticas de interesse no
polino-miais NARMAX (
inputs) (Chen and Billings, 1989), obtendo desta forma, modelos mais
con-cisos e representativos do sistema considerado. De forma similar, (Hernandez and Arkun, 1993) tambem utilizou a caracterstica estatica n~ao linear como forma de auxiliar na valida c~ao dos modelos do sistema.
Outra maneira de combinar tecnicas de identica c~ao com
conhecimen-to a priori do sistema, consiste em determinar uma estrutura de modelo
atraves de leis fsicas que regem o mesmo e, posteriormente, estimar os seus par^ametros (Cubillos et al., 1996! Cubillos and Lima, 1997).
1.1 Identicac~ao de Sistemas N~ao Lineares
A maior parte dos sistemas reais s~ao n~ao lineares por natureza. Se a faixa de varia c~oes das variaveis do sistema n~ao for ampla, ent~ao o sistema pode ser linearizado dentro de uma faixa de varia c~ao relativamente pequena das variaveis (Ogata, 1993), ou seja, em alguns casos, e possvel representar sistemas n~ao lineares atraves de modelos lineares por partes. No entanto, em geral a utiliza c~ao de modelos n~ao lineares e mais adequada, ja que tais modelos incorporam as n~ao linearidades existentes no sistema. Dentre as representa c~oes n~ao lineares mais comumente utilizadas, pode-se citar mod-elos hbridos (Haber and Unbehauen, 1990), RNAs e RBFs (Radial Basis
Function) (Haykin, 1994! Braga et al., 1998), HNM (Hybrid Neural
Mod-el) (Cubillos and Lima, 1997), modelos polinomiais contnuos (Gouesbet and
Letellier, 1994) e modelos NARMAX (Chen and Billings, 1989).
Muitos sistemas reais s~ao variantes no tempo. Nestes casos, quando deseja-se realizar um controle das variaveis do processo, e recomendavel
faz^e-lo on-line (#Astr"om and Wittenmark, 1995). Alem disso, alguns sistemas,
como por exemplo, os envolvendo valvulas, apresentam falhas constantes que n~ao s~ao facilmente detectadas, exigindo a necessidade de serem realizados testes estaticos especcos. No entanto, tais testes demandam tempo, alem de nem sempre poderem ser efetuados em sistemas reais (Gruhn et al., 1998). Sendo assim, dentre as inumeras aplica c~oes da identica c~aoon-line, realizada
atraves da utiliza c~ao de algoritmos recursivos, pose citar as seguintes: de-tec c~ao de falhas em equipamentos e controle adaptativo. No primeiro caso, um controle do tipo MBC (Model Based Control) pode ser implementado,
1.2 Apresentac ~
ao do Trabalho 4
conceitos de pontos xos e agrupamentos de termos para estimar as carac-tersticas estaticas com base nos modelos, sem a necessidade da realiza c~ao de novos testes na planta.
Alem de aplica c~oes como em processos de detec c~ao de falhas, o conheci-mento da caracterstica estatica n~ao linear pode ser, em princpio, utilizado no proprio controle ou para analise do comportamento do sistema (Hernandez and Arkun, 1993! Pr"oll and Karim, 1994).
1.2 Apresentac~ao do Trabalho
Este trabalho tem como objetivo estudar a estima c~ao da caracterstica estatica n~ao linear de um sistema, que sofre varia c~ao num determinado tempo. Para alcan car isso, pretende-se utilizar modelos capazes de representar a din^amica do sistema e algoritmos recursivos.
Como o sistema exibe din^amica n~ao linear, e recomendavel a utiliza c~ao de um tipo de representa c~ao para sistemas n~ao lineares. Alem disso, como o objetivo principal do trabalho e a estima c~ao da caracterstica estatica n~ao linear, bem como suas altera c~oes ao longo do tempo, e desejavel utilizar um tipo de representa c~ao a partir da qual seja possvel extrair tais informa c~oes. Conforme sera mencionado no captulo 2 e conrmado nos captulos 4 e 5, os modelos polinomiais NARMAX apresentaram-se bastante satisfatorios.
O captulo 2 proporciona ao leitor uma vis~ao geral do processo de iden-tica c~ao que sera utilizado neste trabalho. S~ao descritos os procedimentos de identica c~ao em batelada e identica c~ao recursiva. Na identica c~ao em batelada s~ao descritas as seguintes fases: experimenta c~ao, detec c~ao de n~ao linearidades, detec c~ao de estrutura, estima c~ao de par^ametros e valida c~oes din^amica e estatstica dos modelos apresentados. A identica c~ao recursiva engloba a fase de experimenta c~ao e estima c~ao de par^ametros. Neste trabalho, n~ao foram realizadas altera c~oes na estrutura do modelo recursivamente.
O captulo 3 apresenta o sistema utilizado, os resultados obtidos nos testes estaticos e din^amicos, o procedimento de detec c~ao de estrutura, estima c~ao de par^ametros e valida c~ao estatstica e din^amica de alguns modelos lineares, quadraticos e cubicos, de acordo com o denido no captulo anterior para a identica c~ao em batelada. Uma preocupa c~ao neste captulo foi a de ver-icar como certos agrupamentos de termos afetam a caracterstica estatica. Alem disso, desejava-se determinar uma estrutura que permitisse recuperar a caracterstica estatica de forma analtica.
conceitos de pontos xos e agrupamentos de termos. Neste captulo as carac-tersticas estimadas s~ao comparadas as obtidas atraves dos testes estaticos, com o intuito de validar os modelos do ponto de vista estatico.
No captulo 5, utilizando algumas das estruturas de modelo denidas no captulo 3, realizou-se a estima c~ao recursiva dos par^ametros dos modelos, bem como da caracterstica estatica n~ao linear. Para isso, foi realizado um teste din^amico no sistema a ser identicado. Durante o teste, foram alteradas as condi c~oes de opera c~ao do sistema de tal maneira a produzir varia c~oes na caracterstica estatica n~ao linear. Usando-se o procedimento descrito neste trabalho, foi possvel estimar recursivamente a referida caracterstica n~ao lin-ear. Acredita-se que a capacidade de monitorar em tempo real caractersticas estaticas de sistemas e ser capaz de quanticar tais caractersticas algebrica-mente, pode ser importante na monitoriza c~ao e controle de processos reais.
Identicac~ao de Sistemas
2.1 Introduc~ao
Na intera c~ao de um indivduo e um determinado sistema e necessario o con-hecimento das variaveis do sistema, bem como da maneira com a qual as mesmas se relacionam, ou seja, e necessaria a obten c~ao de um modelo para representar o sistema em quest~ao (Ljung, 1987).
Existem diversos tipos de modelos. Pode-se citar os modelos fsicos, os mentais, os gracos e os matematicos ou analticos. A escolha do tipo de modelo para representar o sistema dependera das caractersticas estaticas e/ou din^amicas do sistema, bem como do proposito para qual o modelo esta sendo determinado. Os modelos matematicos, no entanto, permitem apli-ca c~oes mais avan apli-cadas, sendo os mais utilizados, seja na engenharia, biologia, medicina, economia ou outras areas (Ljung, 1987).
A modelagem matematica de sistemas din^amicos e uma tarefa de vital im-port^ancia para o desenvolvimento da ci^encia e da tecnologia. Na engenharia, os modelos matematicos permitem analisar e predizer o comportamento de um sistema sob diversas condi c~oes de opera c~ao, e ajustar o desempenho do mesmo, caso os resultados obtidos n~ao sejam satisfatorios. Alem disto, com base no modelo pode-se estudar certas caractersticas estaticas de elementos de interesse na planta, como satura c~oes, histereses e ganhos variaveis.
E importante salientar que um modelo matematico para um dado sistema n~ao e unico (Ogata, 1993). Deve-se observar, em primeiro lugar, se o modelo escolhido e capaz de explicar os dados medidos satisfatoriamente, podendo ser usado para explicar e compreender os fen^omenos observados no sistema real. Em segundo lugar, e fundamental que o modelo seja capaz de atender ao objetivo nal para o qual foi obtido. Em alguns casos, o objetivo principal
da modelagem de um sistema fsico e auxiliar ou tornar mais eciente o projeto de controladores ou acionadores. Em outros casos, o proprio modelo e o objetivo principal, para por exemplo, estudar e analisar um determinado processo, ou para predizer dados futuros.
Existem diversas maneiras de modelar um sistema, tais como a mode-lagem pela fsica do processo e a modemode-lagem atraves de tecnicas de identi-ca c~ao (Ljung, 1987! Norton, 1986! S"oderstr"om and Stoiidenti-ca, 1989). A mod-elagem pela fsica do processo e uma abordagem analtica realizada atraves de conhecimento de leis fsicas do processo, exigindo um conhecimento de-talhado do mesmo, o que torna, em alguns casos, difcil a sua aplica c~ao. A identica c~ao, por outro lado, e uma abordagem experimental, que consiste no desenvolvimento de tecnicas para a estima c~ao de modelos de sistemas din^amicos atraves de dados experimentais, n~ao exigindo conhecimento previo do processo, embora tal conhecimento possa ser utilizado se disponvel.
Uma compara c~ao pode ser feita entre a modelagem atraves de leis fsicas do processo e a identica c~ao de sistemas. Uma vantagem da modelagem matematica e que ela permite visualizar caractersticas intrnsecas ao sis-tema, sendo que, na maioria dos casos, todos os par^ametros do modelo t^em signicado fsico. A desvantagem deste tipo de modelagem e que a deter-mina c~ao do modelo pode ser uma tarefa bastante difcil ou viavel somente a longo prazo. Em casos em que o processo a ser modelado e muito com-plexo, a obten c~ao de modelos usando apenas conhecimento fsico do mesmo e praticamente impossvel. Nestes casos, e mais apropriado utilizar tecnicas de identica c~ao de sistemas. No entanto, a modelagem baseada na fsica do processo pode ser combinada com metodos de identica c~ao (#Astr"om and Wittenmark, 1990), para auxiliar na detec c~ao da estrutura ou apenas para a determina c~ao de coecientes de um modelo, proporcionando desta forma, uma modelagem mais agil e eciente. Uma situa c~ao muito comum na pratica e quando se tem a estrutura do modelo, mas os par^ametros do mesmo s~ao variaveis, ou quando alguns deles n~ao s~ao conhecidos, devendo ser estimados.
2.2 Identicac~ao
A identica c~ao pode ser parametrica ou n~ao parametrica. A identica c~ao parametrica e caracterizada por um vetor de par^ametros e o modelo
cor-respondente por M(). A n~ao parametrica e aquela realizada atraves de
fun c~oes gracas, tais como os metodos de resposta ao impulso, resposta ao degrau e diagramas de resposta em frequ^encia.
re-2.2 Identificac ~
ao 8
alizada, mas e menos precisa (S"oderstr"om and Stoica, 1989). O que se faz, normalmente, e utilizar a mesma para determinar algumas caractersticas do sistema, tais como tempo morto, constante de tempo e ganho e, pos-teriormente, utilizar um metodo parametrico para determinar o modelo do sistema.
A identica c~ao de sistemas e um processo que exige o envolvimento do modelador (Ljung, 1991). O modelador deve analisar quais variaveis do sis-tema s~ao relevantes para a modelagem e se a estrutura do modelo escolhida e adequada (S"oderstr"om and Stoica, 1989), caso contrario, o mesmo deve tomar as decis~oes necessarias para corrigir o problema.
Pode-se citar os seguintes passos no processo de identica c~ao de sistemas: 1. Experimenta c~ao!
2. Detec c~ao de n~ao linearidades no sistema! 3. Determina c~ao da estrutura do modelo! 4. Estima c~ao dos par^ametros do modelo! 5. Valida c~ao do modelo encontrado.
O primeiro passo consiste na determina c~ao da taxa de amostragem, no projeto de sinais de excita c~ao e na coleta de dados experimentais do sistema. O segundo passo consiste na verica c~ao de provaveis n~ao linearidades no sistema. O terceiro passo consiste na determina c~ao da estrutura do modelo e o seguinte, no uso de um algoritmo para estima c~ao dos par^ametros do mesmo. Estas duas ultimas fases podem ser realizadas separadamente ou em conjunto. E, nalmente, utiliza c~ao de procedimentos que permitam vericar se o modelo escolhido e uma representa c~ao valida do sistema. Em caso contrario, retorna-se ao primeiro passo e realiza-retorna-se uma modica c~ao na estrutura.
A identica c~ao de sistemas e de extrema import^ancia no projeto de con-troladores, uma vez que todas as tecnicas para analise e projeto dos mes-mos s~ao baseadas na disponibilidade de modelos apropriados do processo din^amico. Assim, o desenvolvimento do controle digital tem sido acompan-hado por um desenvolvimento analogo de metodos de identica c~ao de sis-temas (#Astr"om and Wittenmark, 1990). Alem disso, no caso de controle adaptativo, onde os par^ametros devem ser estimadoson-line, um metodo de
2.3 Experimentac~ao
A experimenta c~ao e caracterizada pela determina c~ao do sinal de entrada, intervalo de amostragem e coleta de dados para estima c~ao dos par^ametros do modelo (S"oderstr"om and Stoica, 1989). Em primeira inst^ancia determina-se o sinal de entrada e o intervalo de amostragem, e em determina-seguida executam-determina-se os testes para coleta dos dados.
Esta fase e de extrema import^ancia para a identica c~ao de um sistema, uma vez que os resultados posteriores depender~ao da qualidade e montante de informa c~ao contida nos dados coletados (Billings and Fadzil, 1985).
Dados coletados durante o processo de opera c~ao normal podem ser usados para a identica c~ao do sistema. No entanto, a presen ca de malhas de reali-menta c~ao pode levar a problemas. Portanto, e prefervel, sempre que possvel, excitar o processo com sinais externos. Tais sinais devem ser capazes de ex-citar toda a din^amica do sistema durante o processo de identica c~ao. Por exemplo, para um sistema n~ao linear, isto signica excitar as n~ao linearidades de interesse no sistema (Billings and Fadzil, 1985).
Quando for utilizado o algoritmo original de mnimos quadrados ortogo-nal, a identica c~ao de modelos n~ao lineares deve ser realizada com os dados experimentais originais, ou seja, sem remover a media dos sinais de entra-da e saentra-da. Caso contrario, o modelo se tornara dependente entra-da entraentra-da e seus respectivos par^ametros se tornar~ao fun c~ao das caractersticas estatsticas da mesma, ou seja, tal modelo sera valido somente para sinais com carac-tersticas semelhantes (Billings and Fadzil, 1985). E importante salientar que tal problema pode ser contornado se realizada uma normaliza c~ao dos sinais, conforme abordado em (Mendes and Billings, 1996).
A escolha do perodo de amostragem deve ser realizada com cautela, pois afetara diretamente a determina c~ao da estrutura do modelo, estima c~ao de par^ametros e, por consequ^encia, a qualidade do modelo nal. Uma taxa de amostragem lenta tende a tornar os dados adjacentes n~ao correlacionados, o que impossibilita a determina c~ao de um modelo para o processo. Por out-ro lado, se os dados forem amostrados com taxa muito alta, estes tendem a ser altamente correlacionados, causando problemas como mal condiciona-mento da matrix de regressores e diculdade na determina c~ao da estrutura do modelo (Billings and Aguirre, 1995).
Em vista disso, s~ao realizados testes em degrau para estimar a constante de tempo predominante do sistema, e a partir da, determina-se um perodo de amostragem T
ss para a coleta de dados experimentais. No entanto, como
os dados coletados com esta taxa de amostragem s~ao, normalmente, super-amostrados, deve-se denir um novo perodo de amostragem T
2.3 Experimentac~ao 10
utilizado para a identica c~ao.
Um dos procedimentos utilizados para auxiliar na escolha da taxa de amostragem consiste em determinar, em primeira inst^ancia, as fun c~oes de autocorrela c~ao lineary0y0 (2.1) e n~ao lineary
2 0y
2
0 (2.2) da sada do sistema:
y0y0() = E(y(k);y(k))(y(k;);y(k))] (2.1)
y
2 0
y2 0(
) = E(y
2(
k);y
2( k))(y
2(
k;);y
2(
k))] (2.2)
onde y(k) e y 2(
k) representam os valores medios e o apostrofe neste caso
indica media removida. Com base nas fun c~oes de correla c~ao acima, pode-se denir a seguinte constante:
m= minfy0y 2
0g (2.3)
onde y
0 e o instante do primeiro mnimo de
y
0y0 e
y
2
0 e o instante do
primeiro mnimo de y 2
0y 2
0.
Desta forma, o perdo de amostragem pode ser determinado atraves da seguinte rela c~ao (Aguirre, 1995):
m
20 T
s
m
10 (2.4)
em alguns casos o limite superior pode ser m=5 e o inferior m=25. Desta
forma, se T
ss estiver dentro do intervalo proposto pela equa c~ao (2.4), ent~ao
os dados experimentais originais podem ser utilizados. Se, no entanto, T ss
for menor que o limite inferior sugerido, os dados devem ser dizimados a m de satisfazer (2.4). Se T
ss for maior que o limite superior um novo teste deve
ser realizado.
Em grande parte dos sistemas o primeiro mnimo de y 2
0y 2
0 ocorre em
valores menores de do que o primeiro mnimo dey
0y0, ou seja, um perodo
Nos primeiros estagios da identica c~ao de um processo e importante deter-minar, com base nos dados, se o mesmo exibe caractersticas n~ao lineares. Em caso armativo, um modelo n~ao linear devera ser usado para representar o sistema (Billings and Fadzil, 1985! Billings and Voon, 1983! Haber, 1985). Os testes para detec c~ao de n~ao linearidades devem ser independentes do tipo de representa c~ao, bem como da ordem do sistema, uma vez que tais testes ser~ao realizados anteriormente a detecc~ao de estrutura, exigindo a necessidade de testes n~ao parametricos. Existem diversos testes para detectar n~ao linearidades no sistema, tais como: testes no domnio do tempo, testes em regime permanente, testes do valor medio da sada, testes no domnio da frequ^encia e testes de correla c~ao (Haber, 1985).
Os fatores que in$uenciam na escolha do teste s~ao simplicidade e e-ci^encia do mesmo, a possibilidade da planta sair de sua opera c~ao normal, e se o modelo e contnuo ou discreto. Com base nestes fatores, os testes de correla c~ao e os testes no domnio do tempo s~ao mais ecientes se comparados aos demais.
2.4.1 Testes no Domnio do Tempo
Tais testes consistem em excitar o sistema com um sinal de entrada u 1(
k),
obtendo na sada o sinaly 1(
k) correspondente. Repetir o procedimento para
um sinal de entrada u 2(
k) = u
1(
k), onde e uma constante, e obtendo na
saday 2(
k).
Medir a sada y
0 ou termo constante, para uma entrada nula. Subtrair
este valor dey 1(
k) e y
2(
k) e encontrar a seguinte raz~ao:
(k) =
y 2(
k);y
0
y 1(
k);y
0
(2.5) O sistema sera linear se(k) for constante e igual (Haber, 1985).
2.4.2 Metodo de Correlac~ao Cruzada N~ao Linear
Como os sistemas reais usualmente cont^em um termo constante, a m de eliminar o seu efeito, os testes de correla c~ao s~ao aplicados a entrada e sada normalizadas:
u 0
(k) = u(k);u(k)]= 2
2.4 Detecc ~
aode N
~
ao Linearidades 12
y 0(
k) = y(k);y(k)]= 2(
y(k)) (2.7)
onde
2(
u(k)) e
2(
y(k)), s~ao as vari^ancias da entrada e sada do sistema,
respectivamente, e u(k) ey(k) correspondem aos respectivos valores medios.
Pode-se tambem denir a seguinte variavel:
x(k) = u
02
(k);u 02(
k)]=
2
(u 02
(k)) : (2.8)
Seja a seguinte fun c~ao de correla c~ao (Haber, 1985):
xy
0(
) =Ex(t+)y
0(
t)] (2.9)
donde tem-se que:
xy
0(
) = 0 8 (2.10)
se o sistema for linear.
2.4.3 Metodo de Autocorrelac~ao N~ao Linear
Seja a seguinte fun c~ao de correla c~ao (Haber, 1985):
vy
0() =Ev(t+)y
0(
t)] (2.11)
onde v = y 0
2
;y
0 2(
k)]=(y 0
2(
k)). Se vy
0(
) e igual a zero 8 , ent~ao o
sistema e linear.
E importante salientar que os testes de correla c~ao, representados pelas equa c~oes (2.9 e 2.11), podem ser realizados utilizando-se a mesma massa de dados de identica c~ao, ao contrario do teste no domnio do tempo, que exige a execu c~ao de um outro teste, embora o mesmo seja relativamente simples.
Por outro lado, os testes de correla c~ao para detec c~ao de n~ao linearidades so ser~ao validos quando o sistema for excitado por um sinal aleatorio ou pseudo-aleatorio, caso contrario, e impossvel determinar se os resultados encontrados s~ao provenientes de correla c~ao entre rudo presente nos dados, ou se e decorrente de n~ao linearidades presentes na din^amica do sistema (Billings and Fadzil, 1985! Haber, 1985).
2.5 Representac~oes para Sistemas N~ao Lineares
Uma vez determinada a presen ca de n~ao linearidades no sistema, escolhe-se uma repreescolhe-senta c~ao matematica. Embora, em alguns casos, escolhe-seja possvel representar sistemas com modelos lineares por partes, em torno de pontos de opera c~ao pre-denidos, em geral, um modelo n~ao linear e mais adequado, uma vez que incorpora as n~ao linearidades intrnsecas ao sistema original.
Existem diversas representa c~oes para modelagem de sistemas n~ao lin-eares, dentre elas, pode-se citar as series de Volterra e Wiener, os modelos por blocos orientados, polinomiais, bilineares, semi-lineares com par^ametros variaveis, lineares por partes (Billings, 1980! Chen and Billings, 1989! Haber and Keviczky, 1985! Haber and Unbehauen, 1990) e redes neurais artici-ais (Braga et al., 1998! Haykin, 1994).
Como cada algoritmo e melhor para representar um tipo de sistema de acordo com o tipo de n~ao linearidade presente nos dados (C inar, 1995), n~ao se pode dizer, de imediato, que uma das abordagens seja mais adequada, mesmo porque, para algumas representa c~oes, n~ao existe uma forma sistematica para determinar a estrutura \ideal" de um dado sistema (Ronco and Gawthrop, 1997). A escolha do tipo de modelo tambem depende da exist^encia ou n~ao de informa c~ao a priori, do proposito para o qual o modelo esta sendo utilizado
e da complexidade do sistema (Billings, 1980).
2.6 Modelo NARMAX
Para sistemas lineares discretos utilizam-se modelos de equa c~oes lineares a diferen cas, que relacionam variaveis de entrada e sada do sistema, pode-se citar os modelos ARX (AutoRegressive with eXogenous inputs), ARMAX
(AutoRegressiveMovingAveragewitheXogenousinputs), dentre outros. Uma
descri c~ao analoga para sistemas n~ao lineares discretos s~ao os modelos NAR-MAX (Nonlinear AutoRegressive Moving Average with eXogenous inputs),
que realizam um mapeamento n~ao linear das entradas e sadas passadas para a sada atual (Sj"oberg et al., 1995). Tais modelos s~ao capazes de representar uma ampla classe de sistemas n~ao lineares e ao contrario do que ocorre com as Series de Volterra e Wiener (Billings, 1980! Haber and Keviczky, 1985), evitam a necessidade de grande numero de par^ametros (Chen and Billings, 1989).
Seja o seguinte modelo geral multivariavel:
y(k) = f(y(k;1)y(k;n
y)
u(k;1)u(k;n
u)
e(k;1)e(k;n
e)) +
2.6 Modelo NARMAX 14
onde
y(
k
) =2 6 6 6 6 4
y
1(k
)y
2(k
)...
y
m(k
) 3 7 7 7 7 5 u(k
) = 2 6 6 6 6 4u
1(k
)u
2(k
)...
u
r(k
) 3 7 7 7 7 5 e(k
) = 2 6 6 6 6 4e
1(k
)e
2(k
)...
e
m(k
) 3 7 7 7 7 5 (2.13)s~ao os vetores de sada, entrada e rudo, respectivamente,
m
e o numero de sadas,r
o numero de entradas,n
y,n
u en
e s~ao os atrasos maximos para asada, entrada e rudo, respectivamente,
e
(k
) e rudo branco ef
(:
) e qualquer fun c~ao vetorial n~ao linear. A representa c~ao (2.12) e referida como um modelo entrada-sada multivariavel NARMAX.A equa c~ao (2.12) pode ser decomposta em
m
equa c~oes escalares, como se segue:y
i(k
) =f
i(y
1(k
;1)
y
1(
k
;
n
y)y
m(k
;1)y
m(k
;n
y)u
1(k
;1)
u
1(
k
;
n
u)u
r(k
;1)u
r(k
;n
u)e
1(k
;1)
e
1(
k
;
n
e)e
m(k
;1)e
m(k
;n
e)) +e
i(k
)i
= 1m :
(2.14)A m de melhorar a $exibilidade da estrutura do modelo os atrasos maximos para cada entrada, sada e rudo podem ser diferentes para cada subsistema:
y
i(k
) =f
i(y
1(k
;1)
y
1(
k
;n
iy1)
y
m(k
;1)y
m(k
;n
iym)u
1(k
;1)
u
1(
k
;n
iu1)
u
r(k
;1)u
r(k
;n
iur)e
1(k
;1)
e
1(
k
;n
ie1)
e
m(k
;1)e
m(k
;n
iem)) +e
i(k
)i
= 1m :
(2.15)A utiliza c~ao da representa c~ao (2.15) para a identica c~ao de um sistema, exige que a mesma seja parametrizada. Expans~oes polinomiais de
f
i(:
) s~aonormalmente satisfatorias, embora n~ao sejam a unica escolha.
Expandindo
f
(:
) como um polin^omio de graul
(Chen et al., 1989), tem-se:y
i(k
) =i0+ Mr Xi1 =1
ii1x
i 1(k
) +Mr X i1 =1 Mr X i2 =i 1
ii1i2x
i1(
k
)x
i2(k
) +
+ Mr X i1 =1 Mr X il =i l;1
ii1 ilx
i 1(k
)x
il(
k
) +e
i(k
)i
= 1onde
i s~ao os par^ametros,x
i os mon^omios ,y
i a sada,e
i e rudo branco eM
r e igual a:M
r =m
(n
y+n
e) +r
n
u:
(2.17)O numero de termos candidatos ao modelo polinomial NARMAX e dado por:
M
= Pl j=0n
ijn
io = 1n
ij= nij ;1
m
P
k=1
niyk+niek+
r
P
k=1
niuk+j;1
j
j
= 1l
9
> > > > =
> > > >
(2.18)
Percebe-se que o numero de termos candidatos cresce rapidamente com o numero de atrasos, grau de n~ao linearidade e com o numero de entradas e sadas do modelo. Sendo assim, se todos os regressores forem includos no modelo, a estima c~ao dos par^ametros da expans~ao polinomial (2.16), im-plicara, geralmente, em mal condicionamento da matriz de regressores. Desta forma, anteriormente ou paralelamente a estima c~ao de par^ametros, deve-se utilizar um metodo para determinar quais termos, dentre os candidatos, de-vem ser includos no modelo (Billings and Fadzil, 1985). Tal procedimento e denominado detec c~ao de estrutura.
Pode-se considerar ainda, o caso particular de um modelo polinomial NARMAX que n~ao tenha modelo de rudo:
y
i(k
) =f
i(y
1(k
;1)
y
1(
k
;
n
y)y
m(k
;1)y
m(k
;n
y)u
1(k
;1)
u
1(
k
;
n
u)u
m(k
;1)u
m(k
;n
u))+
e
i(k
)i
= 1m :
(2.19)Este modelo e conhecido como modelo NARX (Nonlinear
AutoRegres-sive with eXogenous inputs). O numero de mon^omios, a partir dos quais os
regressores candidatos ser~ao formados, e igual a:
n
r=m
n
y+r
n
u:
(2.20)Tais mon^omios s~ao fun c~oes das entradas e sadas do sistema, bem como de seus respectivos atrasos:
2.7 Estimac~ao de Par^ametros 16
x 1
(k)=y
1
(k;1)xm n
y
(k)=ym(k;ny)
xm n
y +1
(k)=u
1
(k;1)xn
r
(k)=ur(k;nu)
(2.21)
Como os modelos do processo e do rudo podem, na pratica, ser desacopla-dos (Billings et al., 1989), primeiro modela-se o processo utilizando o modelo NARX e posteriormente, adicionam-se termos de rudo, caso os testes de valida c~ao indiquem que os resduos n~ao s~ao brancos.
2.7 Estimac~ao de Par^ametros
A estima c~ao de par^ametros pode ser vista como um problema de otimiza c~ao, onde o melhor modelo e aquele que minimiza uma determinada fun c~ao custo. A Equa c~ao (2.16) pode ser representada pela seguinte equa c~ao de regress~ao linear:
y(k) =
M X
i=1 p
i( k)
i+
e(k) k = 1N (2.22)
ondey(k) e a sada do sistema,p i(
k) s~ao os regressores,
i s~ao os par^ametros
a serem estimados e e(k) representa o rudo presente nos dados, din^amica
n~ao modelada, etc.
Expandindo a Equa c~ao (2.22) paraN situa c~oes, tem-se:
y(1) = p
T(1)
+e(1)
y(2) = p T
(2)+e(2)
...
y(N) = p
T(
N)+e(N)
onde
=
1
2
M]
T
e
p T(
k) = p
1( k)p
2(
k) p
M(
k)] :
Desprezando-se o termo de rudo, o sistema de equa c~oes pode ser repre-sentado na forma matricial:
onde y= 2 6 4 y(1) ...
y(N) 3 7 5 P= 2 6 4 p T(1) ... p T( N) 3 7 5 (2.24)
A identica c~ao permite encontrar um modelo que melhor represente a din^amica do sistema, de acordo com uma determinada fun c~ao custo. No entanto, sempre ocorre uma diferen ca entre a predi c~ao de um passo a frente e o valor medido. Este erro e denominado resduo e pode ser expresso por:
(k) =y(k);p
T ^
=y(k);y(^k) : (2.25)
Como na maioria dos casos reais ha presen ca de rudo nos dados, utiliza-se um numero de amostras maior que o numero de regressores. Desta forma, obtem-se uma matriz de regressores P n~ao quadrada, o que impede que
o vetor de par^ametros seja determinado diretamente atraves da equa c~ao
(2.23). Dene-se ent~ao, um algoritmo para estimarque minimiza a seguinte
fun c~ao custo:
J = 12
N X
k=1
2(
k) = 12 T
= 12 k k
2
(2.26)
ondekk indica norma euclidiana.
A solu c~ao que minimiza a equa c~ao (2.26) e o estimador de mnimos quadrados denido por:
^
= (P
T
P)
;1
P T
y : (2.27)
2.8 Regressores Ortogonais
A estima c~ao direta dos par^ametros do modelo envolvendo todos os termos candidatos, geralmente resulta em mal condicionamento da matriz de regres-sores. Sendo assim, tenicas de ortogonaliza c~ao podem ser utilizadas a m de contornar o problema. A equa c~ao (2.22) pode ser escrita na forma que se segue:
y=P
^
+ (2.28)
onde y= 2 6 4 y(1) ...
y(N) 3 7 5 P= 2 6 4 p T(1) ... p T( N) 3 7 5 ^ = 2 6 6 4 ^ 1 ... ^ M 3 7 7 5 = 2 6 4 (1) ...
(N)
3
7
5
2.8 Regressores Ortogonais 18
e
p T(
k) = p
1(
k)p
M(
k)] : (2.30)
As seguintes condi c~oes, em rela c~ao a equa c~ao (2.28), devem ser satisfeitas: 1. e rudo branco. Ent~ao, no caso polinomial, e n~ao correlacionado
com p i(
k)i= 1M:
2. Os processos a serem identicados s~ao ergodicos. 3. P
T
Pe denida positiva.
A primeira condi c~ao e para garantir estimadores n~ao polarizados. A se-gunda e introduzida para que a media de realiza c~oes seja equivalente a media temporal. A terceira condi c~ao, por sua vez, vem evitar que a matriz normal
P T
Pseja singular ou mal condicionada
2. Se, por outro lado, a terceira
con-di c~ao n~ao for satisfeita, metodos numericos podem ser utilizados na tentativa de contornar o problema, ou seja, pode-se dizer que esta n~ao e uma condi c~ao rgida. No entanto, neste trabalho, todas as condi c~oes dever~ao ser satisfeitas.
2.8.1 Metodo Classico de Ortogonalizac~ao de Gram-Schmidt
Assumindo que a terceira condi c~ao tenha sido satisfeita, pode-se decompor
P T
Pem:
P T
P=A
T
DA (2.31)
onde A e uma matriz triangular superior, M M, com os elementos da
diagonal principal iguais a um:
A=
2
6
6
6
6
6
6
4
1
12
13
1M
0 1
23
2M
...
0 0 0 1
M;1M
0 0 0 0 1
3
7
7
7
7
7
7
5
(2.32)
e De uma matriz diagonal, MM, com elementos positivos. Ent~ao:
y=P(A
;1
A)+ (2.33)
2Se P
T
Pe de nida positiva, a sua forma diagonal sera composta somente por elementos positivos e, desta forma, seu determinante sera maior que zero, ou seja, seP
T
ou
y=Wg+ (2.34)
onde
W = PA
;1
g = A
)
(2.35) A matrizW e denida por:
W= 2 6 4 w 1(1) w M(1) ... ... w 1(
N) w
M( N) 3 7 5 (2.36) ondew
is~ao os regressores auxiliares e g
is~ao os par^ametros estimados
utilizando-se tais regressores. O processo de estima c~ao de par^ametros utilizando-utilizando-se os novos regressores e realizado como se segue!
Passo 1:
11= 1
w
1(
k) =p
1( k) eg^
1 = N P k =1 w 1 (k)y(k) N P k =1 w 2 1 (k)
Passo j: j= 2M :
ij= N P k =1 wi(k)pj(k) N P k =1 w 2 i (k)
i= 1j;1
jj = 1
w j(
k) =p
j(
k);
j;1 P i=1 ij w i( k) eg^
j = N P k =1 w j (k)y(k) N P k =1 w 2 j (k) Calcular ^
i utilizando as seguintes equa c~oes:
^
M = ^
g M
^
i = ^
g i ; M P j=i+1 ij^ j
i=M;11
9 > = > (2.37)
Algumas propriedades do estimador ortogonal s~ao (Billings et al., 1989):
Os regressores auxiliares,w
i, s~ao ortogonais, ou seja: N P
k=1 w
i( k)w
j(
k) =
2.8 Regressores Ortogonais 20
O vetor de par^ametros ^
e equivalente ao obtido atraves da equa c~ao
normal (P T
P)=P
T
y, o que era esperado pois o algoritmo ortogonal
e apenas outra forma de solucionar a equa c~ao normal!
A propor c~ao da vari^ancia da sada explicada por w i e: err] i = g 2 i N P k=1 w 2 i( k) N P k=1 y 2( k)
i= 1M (2.38)
que sera detalhada na se c~ao (2.9.2).
O erro quadratico medio de predi c~ao (MSPE - Mean Square Prediction
Error) e maximo quando n~ao existe nenhum termo no modelo, ou seja,
quan-don
=
n
p+
n
n= 0, sendo igual ao valor quadratico medio do proprio sinal.
A inser c~ao do i-esimo termo g i
w
i ao modelo, ocasiona redu c~ao no MSPE de
um fator igual ag 2
i w
2
i(
k) (Billings et al., 1989). Desta forma, quanto maior o
fatorg 2 i w 2 i(
k), maior a propor c~ao da vari^ancia da sada explicada pelo referido
termo e portanto, maior e a import^ancia do termo para o modelo.
2.8.2 Transformac~ao de Householder
Um outro metodo de ortogonaliza c~ao e a transforma c~ao de Household-er (Chen, 1970). Seja a matriz de regressores Pe o vetor de sada y (2.24).
Denindo a seguinte matriz de regressores modicada:
~ P
(0) =
P:y] = p
1
p
M:
y] = p~ (0) 1 p~ (0) M : y (0)] (2.39)
ak-esima transforma c~ao de Householder e denida como (Chen et al., 1989):
(k)= (
N P i=k (~p k;1 ik )
2)1=2
(k)= 1
(k ) ( (k ) +j~p k ;1 k k j) v (k) i = 8 > < > :
0 parai<k
~
p (k;1)
kk + sgn~
p (k;1)
kk ]
(k)
parai=k
~
p (k;1)
ik
parai>k
~ P
(k)
= ~ P
(k;1)
;v
(k)
( (k)
(v (k)
)T ~ P
(k;1)
) k = 1M : (2.41)
Desta forma, no instante seguinte ak-esima itera c~ao, as colunas da matriz
modicada ~P de ordem inferior a k, ser~ao ortogonais entre si. Obtem-se a
seguinte matriz triangular superior ~P de dimens~aoN (M+ 1):
~ P
(M)=
"
R y
1
0 y
2 #
(2.42)
onde R e uma matriz triangular superior M M, y
1 =
y(1 : M) e y
2 =
y(M + 1 :N).
Considerando a seguinte equa c~ao matricial (Chen et al., 1989):
R=y
1
(2.43)
os par^ametros podem ser estimados por:
^
=R
;1
y1 : (2.44)
A soma do quadrado dos resduos, por sua vez, sera dada por:
ky
2 k
2
: (2.45)
Observa-se que no processo de ortogonaliza c~ao atraves da transforma c~ao de Householder, ao contrario do processo de ortogonaliza c~ao de Gram-Schmidt, n~ao ha a necessidade da utiliza c~ao de um vetor de par^ametros auxiliar.
2.9 Detecc~ao de Estrutura
Um problema chave em identica c~ao de sistemas e encontrar uma estrutura adequada, atraves da qual um \bom"modelo pode ser estimado.
2.9 Detecc ~
aode Estrutura 22
incovenientes so podem ser contornados se aestruturaescolhidaforadequada,
ou seja, se a mesma e capaz de representar o sistema em quest~ao.
Infelizmente, n~ao e obvio qual e a melhor estrutura para representar um sistema. Sabe-se, no entanto, que um modelo com mais termos que o necessario, geralmente provoca, na melhor das hipoteses, efeitos espurios e na pior, instabilidade numerica (Aguirre, 1994a). Alem do numero de termos do modelo, efeitos espurios tambem podem ser ocasionados se o modelo es-tiver sobreparametrizado em rela c~ao ao numero de pontos xos e a ordem do mesmo (Mendes and Billings, 1998). Sabe-se ainda que, um modelo muito $exvel causa generaliza c~ao pobre (Reed, 1993), alem de que modelos menores t^em maior velocidade de processamento e maior simplicidade.
Embora a determina c~ao da estrutura do modelo seja essencial, esta ain-da e a tarefa mais ardua ain-da identica c~ao de sistemas n~ao lineares, em vista da grande quantidade de modelos possveis e da inexist^encia de uma regra que permita escolher, de imediato, tal estrutura. Por esta raz~ao este ainda e um problema pesquisado, embora exista grande numero de trabalhos na literatura a respeito. No caso de modelos NARMAX, usam-se criterios de informa c~ao (Leontaritis and Billings, 1987! Kortmann et al., 1988), ERR (
Er-ror ReductionRatio) (Billings et al., 1989! Chen et al., 1989) e agrupamentos
de termos (Aguirre, 1994a! Aguirre and Billings, 1995a! Aguirre and Mendes, 1996! Aguirre, 1994b), dentre outros, para escolher a melhor estrutura que seja capaz de representar o sistema. Tais criterios ser~ao descritos a seguir.
2.9.1 Agrupamentos de Termos
Expandindo o modelo NARX (2.19) na forma polinomial, com termos com grau de n~ao linearidade variando entre 1
m
ll
, cada termo de graum
lpode conter um fator em
y
(k
;n
i) de ordemp
, um fator emu
(k
;n
i) deordem (
m
l;p
) e um coeciente pml ;p(n
1n
ml):y
(k
) = Xl ml=0ml
X
p=0 nXynu
n1nml
pml;p(n
1n
ml)p Y
i=1
y
(k
;n
i) mlY
i=p+1
u
(k
;n
i) (2.46)onde
nXynu
n1nml
= Xny n1=1
nu
X
nml=1
:
(2.47)Por exemplo, expandindo a equa c~ao (2.46) para grau de n~ao linearidade
y
(k
) = 00+ nyX
n1=1
10(n
1)y
(k
;
n
1) +
nu
X
n1=1
01(n
1)u
(k
;
n
1) +
ny
X
n1 nu
X
n2
20(n
1n
2)y
(k
;
n
1)
y
(k
;
n
2) +
ny
X
n1 nu
X
n2
11(n
1n
2)y
(k
;
n
1)
u
(k
;
n
2) +
ny
X
n1 nu
X
n2
02(n
1n
2)u
(k
;
n
1)
u
(k
;
n
2)
:
(2.48)E importante salientar que a massa de dados composta por
u
(k
) ey
(k
) foi obtida atraves dos dados contnuosu
(t
) ey
(t
) com taxa de amostragem igual a 1=T
s e que os coecientes dos termos dependem do perodo de amostragemT
s.Se o perodo de amostragem for pequeno de tal forma que:
y
(k
;1)y
(k
;2)y
(k
;n
y)u
(k
;1)u
(k
;2)u
(k
;n
u) )a equa c~ao (2.46) pode ser escrita na forma que se segue:
y
(k
) nXynun1nml
pml;p(n
1n
ml)l X
ml=0 ml
X
p=0
y
(k
;n
i) pu
(k
;
n
i)ml;p (2.49)
As constantes nyPnu n1nml
pml;p(n
1n
ml) na equa c~ao acima s~ao oscoe-cientes dos agrupamentos de termos ypuml;p, que contem termos da
for-ma
y
(k
;i
)pu
(k
;j
)ml;p para
m
l = 0
l
ep
= 0m
l. Taiscoe-cientes s~ao denominados coecoe-cientes de agrupamentos, sendo representados por P
ypuml;p (Aguirre and Billings, 1995a).
Ent~ao, o conjunto de termos candidatos para o modelo NARX e consti-tudo pela uni~ao de todos os agrupamentos possveis, onde:
agrupamentos possveis =
p=0 mlml=0 l
ypuml;p
= constante y u y2 yu
2.9 Detecc ~
aode Estrutura 24
E importante salientar que quando T s
! 0, os termos dentro de cada
agrupamento se tornar~ao equivalentes e seus respectivos coecientes tender~ao a zero, exceto P
y, que assumira valor unitario (Aguirre and Billings, 1995a),
ou seja:
lim
Ts!0
y = 1 (2.51)
e
lim
Ts!0
ypum
;p = 0 para os demais agrupamentos : (2.52)
Ent~ao um agrupamento de termos e denido como um conjunto de ter-mos do mesmo tipo e sendo seus coecientes denidos como a soma dos coecientes de todos os termos do agrupamento. Esta abordagem baseia-se no fato de que dois ou mais termos desnecessarios podem ter coecientes com amplitudes signicativas, mas que se anulam ou possuem valores ir-relevantes se comparados com os demais agrupamentos, caracterizando um agrupamento espurio. Tais agrupamentos alem de aumentar o numero de ter-mos candidatos, tendem a gerar din^amicas n~ao existentes no sistema original diminuindo, portanto, a conabilidade do modelo.
Esta abordagem e diferente a proposta por (Kadtke et al., 1993), que apresenta um metodo de detec c~ao baseado na elimina c~ao de coecientes dos termos que possurem valor inferior a um certo limiar, metodo denominado zeroing and retting. Nessa abordagem, apos a elimina c~ao dos coecientes, reestimam-se os par^ametros do modelo reduzido, sendo baseado na ideia de que termos espurios t^em coecientes insignicantes.
Um problema introduzido pelo zeroing and retting e que os coecientes dependem do perodo de amostragem e da exist^encia de rudo nos dados, alem de que termos espurios podem apresentar, em alguns casos, valores com ordem de grandeza relevante ou ate mesmo superior a dos efetivos, ou ainda, os termos efetivos podem ter coecientes pequenos (Aguirre, 1994a).
2.9.2 A Taxa de Reduc~ao de Erro
permitem analizar a relev^ancia de cada termo para o modelo, vericando a por c~ao da vari^ancia da sada explicada pelo mesmo.
Utilizando a propriedade dos regressores ortogonais denida pela equa c~ao (2.38) e o metodo classico de Gram Schmidt, introduzido anteriormente, pode-se denir um criterio para detec c~ao de estrutura denominado ERR (
Er-ror Reduction Ratio) que e dado pela seguinte express~ao:
err]
i =
g 2
i w
T
i w
i
y T
y
1iM (2.53)
ondew
i e
g
i s~ao os regressores ortogonais e os par^ametros estimados,
respec-tivamente, ye a sada eM e o numero de termos possveis para o modelo,
se-gundo o criterio adotado. Quanto maior ondice ERR, maior e a import^ancia do termo para o modelo. Assim, os termos que apresentarem umndice ERR muito baixo, n~ao s~ao includos no modelo. Desta forma, este criterio evita mal condicionamento numerico ja que termos linearmente dependentes ou irrelevantes s~ao eliminados.
O ndice err
i do
i-esimo termo, w
i, indica a propor c~ao do valor medio
quadratico da sada, y T
y, explicada por esse termo. Consequentemente,
n X
i=1 err
i = 1
(2.54)
e desta forma, os termos irrelevantes para o modelo, contribuir~ao com um percentual desprezvel para o ndice err, podendo ser eliminados.
Apos a sele c~ao dos termos relevantes para o modelo, calculam-se os par^ametros originais
i, caso se esteja usando o metodo de Gram-Schmidt, ou
seja, este criterio permite ao mesmo tempo selecionar a estrutura e estimar os par^ametros do modelo.
De forma similar, pode-se determinar a estrutura atraves da transfor-ma c~ao de Householder (Chen et al., 1989). Denindo:
(y i
j) 2
= (b (k)
j
a (k)
j
)2
para j=kM (2.55)
ondea (k)
j e
b (k)
j s~ao inicializados da seguinte maneira:
(a (1)
j )
2 =
N X
(~p (0)
ij ) 2
2.9 Detecc ~
aode Estrutura 26
b (1) j = N X i=1 ~ p (0) ij y i(0)
j = 1M (2.56)
Calculando ~ P
(k) de acordo com as Equa c~oes (2.40) e (2.41), ( a (k+1) j ) 2 e b (k+1) j para
j=k+ 1M podem ser determinados por:
(a (k+1)
j )
2
= (a (k)
j )
2
;(~p (k) kj) 2 b (k+1) j = b (k) j ;p~
(k)
kj y
(k)
k
j=k+ 1M (2.57)
Os regressores selecionados para o modelo ser~ao aqueles que possurem maiores valores de (y
(i)
j )
2. Desta forma, o fator ( y
(i)
j )
2
=<y y>corresponde
ao ndice err]
i calculado pelo metodo de ortogonaliza c~ao de Gram-Schmidt.
E importante salientar que, a transforma c~ao de Householder elimina a necessidade de se estimarem os par^ametros durante a detec c~ao de estrutura como ocorre no metodo classico de Gram-Schmidt.
2.9.3 Criterios de Informac~ao
O AIC (Akaike's Information Criterion) (Akaike, 1974) e um criterio es-tatstico, que verica a redu c~ao na vari^ancia dos resduos a medida que ter-mos s~ao incorporados ao modelo, mas levando em considera c~ao o princpio da parsim^onia3.
Sabendo-se que o nvel de signic^ancia do criterio AIC e dado pelo nvel de signic^ancia da distribui c~ao
2 com
sgraus de liberdade
4, e valor crtico
(s) = 2s. O AIC e denido atraves da seguinte express~ao:
AIC() =NlogVar()] +n
(2.58)
onde N e o numero de dados de treinamento, Var() e a vari^ancia dos
resduos, n
e o numero de termos do modelo,
e o valor crtico da
dis-tribui c~ao
2 com um grau de liberdade para um dado nvel de signic^ancia.
3O princpio da parsim^onia a rma que, entre dois ou mais modelos candidatos e cazes em relac~ao a representac~ao da din^amica do sistema, deve-se escolher o modelo com o menor numero de par^ametros independentes (Soderstrom and Stoica, 1989). Tal princpio permite a escolha de um modelo mais el as caractersticas do sistema.