Andr´e Felipe Oliveira de Azevedo Dantas
IDENTIFICA ¸
C ˜
AO E COMPARA ¸
C ˜
AO ENTRE CONTROLE
PREDITIVO COM MODELO N ˜
AO LINEAR E PI
SINTONIZADOS COM PSO EM SISTEMA DE SEPARA ¸
C ˜
AO
GRAVITACIONAL DE ´
AGUA- ´
OLEO
IDENTIFICA ¸
C ˜
AO E COMPARA ¸
C ˜
AO ENTRE CONTROLE
PREDITIVO COM MODELO N ˜
AO LINEAR E PI
SINTONIZADOS COM PSO EM SISTEMA DE SEPARA ¸
C ˜
AO
GRAVITACIONAL DE ´
AGUA- ´
OLEO
Disserta¸c˜ao de Mestrado apresentada ao Pro-grama de P´os-Gradua¸c˜ao em Engenharia El´etrica e de Computa¸c˜ao PPGEEC, da Uni-versidade Federal do Rio Grande do Norte, como parte dos requisitos para a obten¸c˜ao do t´ıtulo de Mestre em Ciˆencias. ´Area de con-centra¸c˜ao: Automa¸c˜ao e Sistemas
Orientador: Prof. D.Sc. Andr´e Laurindo Maitelli
IDENTIFICA ¸
C ˜
AO E COMPARA ¸
C ˜
AO ENTRE CONTROLE
PREDITIVO COM MODELO N ˜
AO LINEAR E PI
SINTONIZADOS COM PSO EM SISTEMA DE SEPARA ¸
C ˜
AO
GRAVITACIONAL DE ´
AGUA- ´
OLEO
Disserta¸c˜ao de Mestrado apresentada ao Pro-grama de P´os-Gradua¸c˜ao em Engenharia El´etrica e de Computa¸c˜ao PPGEEC, da Uni-versidade Federal do Rio Grande do Norte, como parte dos requisitos para a obten¸c˜ao do t´ıtulo de Mestre em Ciˆencias. ´Area de con-centra¸c˜ao: Automa¸c˜ao e Sistemas
Aprovada em:
Prof. D.Sc. Andr´e Laurindo Maitelli
Universidade Federal do Rio Grande do Norte - UFRN Orientador
Prof. Ph.D. Allan de Medeiros Martins
Universidade Federal do Rio Grande do Norte - UFRN Membro
Prof. D.Sc. Carlos Eduardo Trabuco D´orea Universidade Federal do Rio Grande do Norte - UFRN
Membro
Prof. D.Sc. Danielle Simone da Silva Casillo Universidade Federal Rural do Semi- ´Arido - UFERSA
Agrade¸co primeiramente a Deus.
Agrade¸co aos meus pais, Antˆonio e Alina.
`
A minha esposa Amanda Danielle.
Aos meus amigos Samir, Gabriel, F´abio, Grace, Thiago, Vanessa, Frankswell, Tiago, Ga-brielle. Principalmente a Leandro e Daniel que me ajudaram imensamente cooperando com este trabalho.
Agrade¸co aos professores: Andr´e Laurindo Maitelli, Allan de Medeiros Martins, Anderson Luiz de Oliveira Cavalcanti, Carlos Eduardo Trabuco D´orea e Danielle Simone da Silva Casillo por revisarem, sugerirem corre¸c˜oes e melhorias para este trabalho.
Os m´etodos de separa¸c˜ao de ´oleo e ´agua possuem, em sua maioria, aplica¸c˜oes re-duzidas devido ao custo operacional, `a baixa eficiˆencia de separa¸c˜ao e ao alto tempo de processamento da separa¸c˜ao. Por´em, Esses m´etodos de tratamento s˜ao importantes devido `a necessidade de extra¸c˜ao dos contaminantes mais indesejados no processo de produ¸c˜ao do petr´oleo, a ´agua, e ao mesmo tempo, a concentra¸c˜ao de ´oleo na ´agua deve ser m´ınima (da ordem de 40 a 20ppm) para o descarte regular da fase aquosa ao mar. A partir dessa necessidade de tratamento prim´ario objetiva-se, neste trabalho, estudar e implementar al-goritmos de identifica¸c˜ao para modelos polinomiais NARX em malha fechada, detectando a estrutura dos modelos, e comparar estrat´egias de controle PI e preditivo utilizando os modelos NARX (Nonlinear Auto-Regressive with Exogenous Input) atualizados online
em uma combina¸c˜ao de separador trif´asico em s´erie com trˆes baterias de hidrociclones. Os objetivos principais deste trabalho s˜ao obter um processo otimizado de separa¸c˜ao tri-f´asica que regule o sistema, mesmo na presen¸ca de golfadas; mostrar que ´e poss´ıvel obter sintonias otimizadas para os controladores analisando a malha como um todo; e, avaliar e comparar as estrat´egias de controle PI e preditivo aplicadas ao processo. Para cum-prir estes objetivos foi ultilizado um simulador para representar o separador trif´asico e os hidrociclones, al´em de desenvolvidos algoritmos de identifica¸c˜ao de sistemas (NARX) utilizando MQR (M´ınimos Quadrados Recursivo), aliados a m´etodos de detec¸c˜ao de es-trutura de modelos. Tamb´em foram implementados algoritmos de controle preditivo com modelos NARX atualizados online, e algoritmos de otimiza¸c˜ao que utilizam PSO ( Par-ticle Swarm Optimization). O trabalho finaliza com a compara¸c˜ao de resultados obtidos a partir da utiliza¸c˜ao dos controladores PI e preditivo no sistema simulado ambos com parˆametros otimizados atrav´es do algoritmo de nuvem de part´ıculas, e concluindo que as otimiza¸c˜oes realizadas tornam o regulat´orio menos sens´ıvel a perturba¸c˜oes externas (gol-fadas) e quando otimizados os dois controladores apresentam resultados similares, sendo os resultados do preditivo um pouco menos sens´ıvel `as perturba¸c˜oes.
USING PSO IN A GRAVITATIONAL SEPARATION SYSTEM WATER-OIL
ABSTRACT
The separation methods are reduced applications as a result of the operational costs, the low output and the long time to separate the fluids. But, these treatment methods are important because of the need for extraction of unwanted contaminants in the oil production. The water and the concentration of oil in water should be minimal (around 40 to 20 ppm) in order to take it to the sea. Because of the need of primary treatment, the objective of this project is to study and implement algorithms for identification of polynomial NARX (Nonlinear Auto-Regressive with Exogenous Input) models in closed loop, implement a structural identification, and compare strategies using PI control and updated on-line NARX predictive models on a combination of three-phase separator in series with three hydro cyclones batteries. The main goal of this project is to: obtain an optimized process of phase separation that will regulate the system, even in the presence of oil gushes; Show that it is possible to get optimized tunings for controllers analyzing the mesh as a whole, and evaluate and compare the strategies of PI and predictive control ap-plied to the process. To accomplish these goals a simulator was used to represent the three phase separator and hydro cyclones. Algorithms were developed for system identification (NARX) using RLS(Recursive Least Square), along with methods for structure models detection. Predictive Control Algorithms were also implemented with NARX model up-dated on-line, and optimization algorithms using PSO (Particle Swarm Optimization). This project ends with a comparison of results obtained from the use of PI and predictive controllers (both with optimal state through the algorithm of cloud particles) in the si-mulated system. Thus, concluding that the performed optimizations make the system less sensitive to external perturbations and when optimized, the two controllers show similar results with the assessment of predictive control somewhat less sensitive to disturbances.
P´ag.
1 Fluidos encontrados no petr´oleo. Fonte: (THOMAS, 2001) . . . 21
2 Sistema de separa¸c˜ao prim´ario do petr´oleo. Fonte: (FILGUEIRAS, 2005) . . . . 24
3 Sistema de Separa¸c˜ao Trif´asica. Fonte: (PINTO, 2009) . . . 24
4 Sistema de Separa¸c˜ao Trif´asica. Fonte: (SILVEIRA, 2006) . . . 25
5 Forma¸c˜ao das golfadas. Fonte: (SILVEIRA, 2006) . . . 26
6 Esquema de Vari´aveis de Separador Trif´asico. Fonte: Adaptado de (LIMA et al., 2005). . . 27
7 Diagrama de Vari´aveis no Hidrociclone. Fonte: (LIMA et al., 2005) . . . 29
8 Esquema Dinˆamico em Hidrociclone. Fonte: (FILGUEIRAS, 2005) . . . 30
9 Esquema de Hidrociclones em S´erie. Fonte: (SILVEIRA, 2006) . . . 31
10 Conjunto de Separador com trˆes Hidrociclones. Fonte: (TEIXEIRA, 2010) . . . 31
11 Esquema de Eleva¸c˜ao Cont´ınua . Fonte: (TEIXEIRA, 2010) . . . 32
12 Estrat´egia de Controle Preditivo. Fonte: (NUNES, 2001) . . . 45
13 Diagrama de atividades do Trabalho. . . 50
14 Diagrama de Blocos do Simulador no Simulink. . . 52
15 Diagrama de Blocos Aumentado do Gas-Lift. . . 53
16 Diagrama de Blocos da Separa¸c˜ao com os Controladores. . . 54
17 Produ¸c˜oes de ´Agua, ´Oleo e G´as Provenientes do Po¸co e Press˜ao do Tubo de Produ¸c˜ao . . . 56
18 Diagrama de identifica¸c˜ao com MQR . . . 64
21 Identifica¸c˜ao com MQR - Erro de Estima¸c˜ao . . . 67
22 Sinais de Sa´ıdas N˜ao Otimizados X Otimizados . . . 70
23 Sinais de Controle N˜ao Otimizados X Otimizados . . . 71
24 Otimiza¸c˜ao do Desempenho dos Controladores PI’s . . . 72
25 Dispers˜ao das Part´ıculas . . . 73
26 Sinais de Sa´ıdas PI’s Otimizados X Preditivos Otimizados . . . 75
27 Sinais de Controle PI’s Otimizados X Preditivos Otimizados . . . 76
P´ag.
1 Constitui¸c˜ao do petr´oleo e seus usos. Fonte: (THOMAS, 2001) . . . 19
2 Elementos contidos no petr´oleo. Fonte: (THOMAS, 2001) . . . 19
3 Compara¸c˜ao entre os M´etodos de Identifica¸c˜ao em Malha Fechada. Fonte: (GO-MES, 2009) . . . 36
4 Valores dos parˆametros do po¸co. Fonte: (TEIXEIRA, 2010) . . . 55
5 Entradas, vari´aveis manipuladas e controladas e sa´ıdas. Fonte: (TEIXEIRA, 2010) 57
6 Valores dos setpoints das vari´aveis controladas . . . 59
7 Compara¸c˜ao entre as sintonias antes e depois da otimiza¸c˜ao com o PSO . . . . 69
ARX – Auto-Regressive with Exogenous Input
ARMAX – Auto-Regressive Moving Average with Exogenous Input NARX – Nonlinear Auto-Regressive with Exogenous Input
NARMAX – Non-Linear Auto-Regressive Moving Average with Exogenous Input PI – Proporcional e Integral
GPC – Generalized Predictive Control PSO – Particle Swarm Optimization PID – Proporcional Integral e Derivativo MQR – M´ınimos Quadrados Recursivo ERR – Error Ratio Reduction
AIC – Akaike Information Criteria
MGS – M´etodo de Gram-Schmidt
BOW – bulk oil-water cyclone PDC – pre-deoiler cyclone
DC – deoiler cyclone
Win Vaz˜ao de entrada da fase aquosa
Lin Vaz˜ao de entrada da fase oleosa
Gin Vaz˜ao de entrada da fase gasosa
Sl Fra¸c˜ao de abertura da v´alvula de ´oleo do separador
Su Fra¸c˜ao de abertura da v´alvula underflow do hidrociclone DC
Sg Fra¸c˜ao de abertura da v´alvula de g´as
So1 Fra¸c˜ao de abertura da v´alvula overflow do hidrociclone BOW So2 Fra¸c˜ao de abertura da v´alvula overflow do hidrociclone PDC So3 Fra¸c˜ao de abertura da v´alvula overflow do hidrociclone DC hl Altura da fase oleosa
hw Altura da fase aquosa
P Press˜ao no Separador
R Raz˜ao da diferen¸ca de press˜ao do hidrociclone N N´umero m´aximo de amostras
n Horizonte de controle
λ Penaliza¸c˜ao do sinal de controle P1 Press˜ao de entrada do hidrociclone q Vaz˜ao de entrada do hidrociclone
P0 Press˜ao de sa´ıda superior do hidrociclone W0 Vaz˜ao de sa´ıda superior do hidrociclone Pu Press˜ao de sa´ıda inferior do hidrociclone
Wu Vaz˜ao de sa´ıda inferior do hidrociclone
S0 V´alvula de fluxo superior do hidrociclone J Fun¸c˜ao objetivo a ser otimizada
Y Vetor de dados formado a partir das sa´ıdas reais Θ Vetor de parˆametros
P´ag.
1 INTRODU ¸C ˜AO . . . 15
1.1 Objetivos Gerais . . . 17
1.2 Objetivos Espec´ıficos . . . 17
1.3 Motiva¸c˜ao . . . 17
1.3.1 Contamina¸c˜ao por petr´oleo . . . 19
1.4 Organiza¸c˜ao do Texto . . . 22
2 M´ETODOS DE SEPARA ¸C ˜AO ´AGUA, ´OLEO E G ´AS . . . 23
2.1 M´etodos de Separa¸c˜ao . . . 23
2.1.1 Vasos separadores . . . 23
2.1.2 Hidrociclones . . . 28
2.2 Sistema de Eleva¸c˜ao Artificial de Petr´oleo por G´as-Lift . . . 32
3 IDENTIFICA ¸C ˜AO . . . 34
3.1 Identifica¸c˜ao em Malha Fechada . . . 35
3.1.1 Identificabilidade do M´etodo Direto . . . 36
3.2 Estima¸c˜ao de Parˆametros com Modelos Polinomiais NARX . . . 37
3.2.1 ERR - Error Reduction Ratio . . . 40
3.2.2 AIC - (Akaike information criterion) . . . 41
3.2.3 M´etodo dos M´ınimos Quadrados Recursivo. . . 42
3.2.4 Otimiza¸c˜ao Utilizando PSO . . . 43
4 CONTROLE PREDITIVO . . . 45
5 METODOLOGIA . . . 50
5.1 Justificativas para os M´etodos Escolhidos . . . 51
5.2 Simulador . . . 52
5.2.1 Gas-Lift . . . 54
5.2.2 Separa¸c˜ao . . . 57
5.2.3 Controle . . . 58
5.3 Identifica¸c˜ao . . . 59
5.3.1 Determina¸c˜ao da Ordem do Modelo (ERR, AIC) . . . 60
5.3.2 M´ınimos Quadrados Recursivos (MQR -Online) . . . 63
5.4 Controle PID e Preditivo . . . 68
6 CONCLUS ˜AO . . . 79
REFERˆENCIAS . . . 81
APˆENDICE - EQUA ¸C ˜OES QUE RELACIONAM AS ENTRADAS E SA´IDAS DO SEPARADOR TRIF´ASICO . . . 85
APˆENDICE - EQUA ¸C ˜OES QUE RELACIONAM AS ENTRADAS E SA´IDAS DOS HIDROCICLONES . . . 89
APˆENDICE - MODELO MATEM ´ATICO DO SISTEMA DE ELEVA-¸
1 INTRODU ¸C ˜AO
Grande parte do petr´oleo produzido no Brasil ´e extra´ıdo de campos mar´ıtmos onde sistemas de produ¸c˜ao s˜ao respons´aveis pelo tratamento prim´ario. Esse tratamento ´e neces-s´ario devido ao fluido de sa´ıda do po¸co produtor de petr´oleo constituir-se de uma fra¸c˜ao de ´agua, outra de ´oleo, e ainda uma fra¸c˜ao de g´as, juntamente com outras impurezas presentes no fluido (SILVEIRA, 2006).
O ´oleo proveniente do po¸co n˜ao atende `as especifica¸c˜oes, devendo passar por um pr´e-tratamento para ser refinado. Emuls˜oes de ´agua em ´oleo formam-se no processo de extra¸c˜ao do ´oleo cru, causando problemas em diversas opera¸c˜oes (BEHIN; AGHAJARI, 2008).
Devido ao fluido estar misturado, o pr´e-tratamento deve ser realizado com o objetivo de separar a ´agua, o ´oleo e o g´as da mistura, condicionar o ´oleo, ap´os separado dos outros fluidos, sendo enviado `as refinarias, e tratar a ´agua para ser reinjetada ou descartada no mar (SILVEIRA, 2006). Nesse sentido a separa¸c˜ao de ´oleo e ´agua ´e cr´ıtica para o bom funcionamento na ind´ustria do petr´oleo (PINTO, 2009).
Os m´etodos de separa¸c˜ao de ´oleo e ´agua possuem, em sua maioria, aplica¸c˜oes re-duzidas devido ao custo operacional, `a baixa eficiˆencia de separa¸c˜ao e ao alto tempo de processamento da separa¸c˜ao. Isso acontece devido ao processo de separa¸c˜ao prim´aria acontecer atrav´es de separadores gravitacionais horizontais (PINTO, 2009).
Al´em desses problemas, as quantidades de ´oleo em ´agua e de ´agua em ´oleo nas emuls˜oes, e de g´as no fluxo de entrada do separador s˜ao definidas pelas condi¸c˜oes dos po¸cos de onde se extrai o fluido e condi¸c˜oes de escoamento nos dutos, desde sua origem at´e o separador. A evolu¸c˜ao do escoamento ´e respons´avel pela principal e mais preocupante perturba¸c˜ao na entrada do separador, o regime de golfadas severas (SILVEIRA, 2006).
Como processos convencionais de tratamento utilizando o separador trif´asico aco-plado a hidrociclones obtˆem resultados que se ad´equam `as normas ambientais, e fornecem um pr´e-tratamento adequado para o ´oleo, foi realizado o estudo e compara¸c˜ao de estrat´e-gias diversas de controle que auxiliar˜ao no desenvolvimento de um sistema mais eficiente para remo¸c˜ao de contaminantes t´oxicos e tamb´em para a melhoria da qualidade da ´agua e do ´oleo obtidos ao final do processo, colaborando para a redu¸c˜ao do impacto ambien-tal provocado pelo descarte da ´agua produzida e para a especifica¸c˜ao do ´oleo(CAVACO; BARROS, 2005).
mantendo os n´ıveis de ´agua ´oleo e g´as a padr˜oes aceit´aveis para o funcionamento ´otimo do processo.
Com o objetivo de tornar o sistema de separa¸c˜ao de ´agua ´oleo e g´as menos sens´ıvel `a perturba¸c˜oes em um sistema de separa¸c˜ao trif´asica foram obtidos na literatura equa-¸c˜oes que modelam seu comportamento. Essas equaequa-¸c˜oes foram implementadas em uma linguagem de programa¸c˜ao e transformadas em um simulador, representando o processo de separa¸c˜ao trif´asica. Elas est˜ao descritas no trabalho de Teixeira (2010). A partir do simulador ´e poss´ıvel observar sua estrutura e projetar controladores de maneira a realizar um controle regulat´orio.
No trabalho proposto ser˜ao realizadas algumas etapas para obter controladores e modelos NARX (Non-Linear Auto-Regressive with Exogenous Input) do processo, che-gando ao objetivo final que ´e o controle regulat´orio. Por isso, ser´a analisado o sistema simulado, para obter a representa¸c˜ao, ou o modelo, que mais seja compat´ıvel com o pro-blema. Ou seja, ser˜ao utilizados m´etodos de detec¸c˜ao de estrutura de modelos, obtendo ao final aquele que melhor representa o processo. No modelo obtido foi utilizada a represen-ta¸c˜ao polinomial NARX, identificado a partir de dados obtidos em malha fechada, cujas equa¸c˜oes s˜ao n˜ao lineares.
Ap´os a detec¸c˜ao da estrutura do modelo, utilizando os m´etodos necess´arios para isso, foram escolhidas estrat´egias de controle utilizadas para regular o sistema de separa¸c˜ao. Para tanto, foram escolhidos os controladores PI (Proporcional e Integral), devido `as dinˆamicas que mais influenciam no processo serem de n´ıvel (ou seja, possui uma dinˆamica lenta), e preditivo, devido a possibilitar previs˜oes do processo e utiliz´a-las para evitar comportamentos futuros indesejados.
Para a realiza¸c˜ao do controle preditivo no sistema proposto ser´a utilizado o modelo NARX identificado online a partir dos dados em malha fechada, na ausˆencia de ru´ıdos de medi¸c˜ao, na presen¸ca de um sinal externo e perturba¸c˜oes na forma de golfadas. Esse modelo ser´a atualizado de maneira paralela `a otimiza¸c˜ao do controle preditivo.
A utiliza¸c˜ao de estrat´egias de controle est´a associada `a necessidade de sintonia dos controladores. Para tanto, ser˜ao realizadas sintonias iniciais: para o PI baseada no trabalho de Teixeira (2010) e para o preditivo a sintonia inicial ser´a realizada empiricamente.
Em seguida, ser˜ao implementados algoritimos de otimiza¸c˜ao heur´ısticos baseados em nuvem de part´ıculas cujo objetivo ser´a minimizar o erro quadr´atico m´edio somado `a derivada do sinal de controle ao quadrado. Com isso, pretende-se obter sintonias ´otimas, a partir das sintonias iniciais, para os controladores PI e preditivo, isto ´e, sintonias que sejam adequadas para o sistema manter o controle regulat´orio o menos sens´ıvel poss´ıvel `as golfadas que entram do vaso separador.
otimizadas pelo mesmo m´etodo, utilizando os mesmos parˆametros no otimizador, uma compara¸c˜ao entre os resultados obtidos foi realizada da maneira mais justa poss´ıvel.
1.1 Objetivos Gerais
O objetivo geral deste trabalho ´e estudar e implementar algoritmos de detec¸c˜ao de estrutura de modelos, identifica¸c˜ao, controle PI e preditivo. Esses algoritmos ser˜ao apli-cados em uma combina¸c˜ao de separador trif´asico e trˆes baterias de hidrociclones para que seja poss´ıvel a compara¸c˜ao entre o controle PI n˜ao otimizado, PI otimizado, e Pre-ditivo otimizado, todos utilizando o mesmo algoritmo PSO maximizando o desempenho do sistema de separa¸c˜ao. Ou seja, fortalecendo o controle regulat´orio e tornando-o menos sens´ıvel a presen¸ca de golfadas no sistema, otimizando, consequentemente os processos de remo¸c˜ao de contaminantes t´oxicos presentes na ´agua e de especifica¸c˜ao do ´oleo para refino.
1.2 Objetivos Espec´ıficos
S˜ao objetivos espec´ıficos deste trabalho:
• Implementar algoritmos de detec¸c˜ao de estrutura de modelos;
• Implementar algoritmos de identifica¸c˜ao para o sistema n˜ao linear, modelando cada uma das vari´aveis do processo contidas no simulador;
• Realizar testes para valida¸c˜ao do modelo identificado;
• Implementar algoritmos para a realiza¸c˜ao do controle preditivo utilizando os modelos n˜ao lineares propostos, ou seja, com estrutura detectada;
• Realizar a identifica¸c˜ao do modelo de maneira online na ausˆencia de ru´ıdos de medi¸c˜ao e na presen¸ca de um sinal externo de perturba¸c˜ao;
• Buscar sintonia ´otima para os controladores PI e Preditivo, utilizando os algo-ritmos baseados em nuvem de part´ıculas;
• Avaliar o desempenho dos controladores comparando-os e listando suas vanta-gens e desvantavanta-gens.
1.3 Motiva¸c˜ao
abriga e rege a vida em todas as suas formas, isso implica dizer que, por se tratar de um bem de uso comum, o meio ambiente passa a ser visto como um bem jur´ıdico unit´ario (MOURA, 2007).
Cada vez mais tem aumentado o foco dos ´org˜aos governamentais quanto `a quest˜ao do meio ambiente, pois devido `a necessidade de tornar o crescimento econˆomico compat´ıvel com a preserva¸c˜ao ambiental, est˜ao sendo desenvolvidos instrumentos que mudem a forma que o processo produtivo abrange e reflete os custos envolvidos no processo de produ¸c˜ao e consumo associados aos bens e servi¸cos ambientais (MACHADO,2004). Esses instrumentos desenvolvidos orientam os agentes econˆomicos a valorizar os bens e servi¸cos ambientais de acordo com sua escassez e oportunidade social.
Alguns desses instrumentos, tamb´em chamados de mecanismos de mercado, s˜ao em-pregados como sistemas de cobran¸ca, na forma de tarifas, taxas ou impostos de forma a atribuir valor pelo uso do meio ambiente. Outros regulam a utiliza¸c˜ao do meio ambi-ente pela aplica¸c˜ao de subs´ıdio `as empresas pagando pela redu¸c˜ao dos n´ıveis de polui¸c˜ao em forma de cr´editos e incentivos fiscais de diversas modalidades. Existe ainda outro instrumento utilizado para administrar recursos ambientais o ”Mercado da ´Agua”. Este mecanismo promove a transferˆencia do direito de utilizar a ´agua em troca de remunera¸c˜ao determinada pela oferta e procura, custo de transporte, pela seguran¸ca de abastecimento e pelo custo de repara¸c˜ao por quaisquer impactos ecol´ogicos (MACHADO, 2004).
A ´agua ´e essencial para a vida em nosso planeta, no entanto esse recurso est´a cada vez mais escasso e sua ausˆencia ou contamina¸c˜ao ocasiona imensos custos humanos e uma grande perda em escala global de produtividade social (ORGANIZA ¸C ˜AO DAS NA ¸C ˜OES UNIDAS (ONU), 2005). A ´agua bruta que ´e retirada dos rios e lagos, ou len¸c´ois subterrˆa-neos ap´os a capta¸c˜ao, sofre mudan¸cas durante o tratamento para se adequar `a utiliza¸c˜ao humana. Com a utiliza¸c˜ao da ´agua, esta, novamente, sofre modifica¸c˜oes quanto a sua qualidade e elementos agregados a ela, tornando-se impura. Para que esses poluentes n˜ao contaminem as fontes de utiliza¸c˜ao, os despejos s˜ao submetidos a um tratamento visando `a remo¸c˜ao de poluentes mais agressivos (SPERLING,2005).
1.3.1 Contamina¸c˜ao por petr´oleo
O petr´oleo, quando no estado l´ıquido, ´e uma substˆancia oleosa, inflam´avel de cor castanha clara e menos densa que a ´agua. Ele ´e constitu´ıdo por uma mistura de v´arios compostos orgˆanicos, ou hidrocarbonetos, e separ´a-los em componentes puros ´e pratica-mente imposs´ıvel. Por isso, este ´e normalpratica-mente separado em fra¸c˜oes t´ıpicas que s˜ao o g´as residual, GLP, gasolina, diesel, querosene, gas´oleo leve e pesado, lubrificantes e res´ıduos. A tabela 1mostra os subprodutos obtidos a partir do petr´oleo e suas aplica¸c˜oes.
Tabela 1 - Constitui¸c˜ao do petr´oleo e seus usos. Fonte: (THOMAS,2001)
Fra¸c˜ao Usos
G´as Residual, g´as liquefeito de petr´oleo - GLP G´as combust´ıvel engarrafado, uso dom´estico e industrial
Gasolina Combust´ıvel de autom´oveis, solvente
Querosene Ilumina¸c˜ao, combust´ıvel de avi˜oes a jato
Gas´oleo Leve Diesel, fornos
Gas´oleo Pesado Combust´ıvel, mat´eria-prima para lubrificantes
Lubrificantes Oleos Lubrificantes´
Res´ıduo Asfalto, piche, impermeabilizantes
O petr´oleo ´e obtido a partir de reservat´orios e, portanto, o ´oleo obtido a partir de cada um desses reservat´orios pode possuir caracter´ısticas diferentes em termos de viscosidade, cor, densidade.
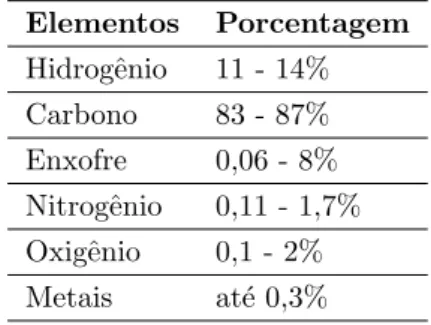
Al´em de hidrocarbonetos, o petr´oleo tamb´em cont´em uma quantidade apreci´avel de elementos constitu´ıdos por enxofre, nitrogˆenio, oxigˆenio e metais, que s˜ao os compostos sulfurados, os nitrogenados, oxigenados, as resinas e asfaltenos e os compostos met´alicos em uma propor¸c˜ao consider´avel, como mostrado na tabela 2.
Tabela 2 - Elementos contidos no petr´oleo. Fonte: (THOMAS,2001)
Elementos Porcentagem
Hidrogˆenio 11 - 14%
Carbono 83 - 87%
Enxofre 0,06 - 8% Nitrogˆenio 0,11 - 1,7% Oxigˆenio 0,1 - 2%
Metais at´e 0,3%
abasteci-mento de combust´ıvel fazer parte da vida das cidades, porque apesar de o Brasil ser um pa´ıs privilegiado em volumes de ´aguas superficiais, sua polui¸c˜ao tem sido t˜ao devastadora que a necessidade de ´aguas subterrˆaneas tem aumentado, e, por fim, porque a contamina-¸c˜ao superficial ´e dif´ıcil de ser detectada. Esses fatores contribuem para que o risco neste tipo de contamina¸c˜ao seja elevado (OLIVEIRA; OLIVEIRA, 2008).
A importˆancia do petr´oleo em nossa sociedade, tal como est´a atualmente organizada, ´e extensa e fundamental. O petr´oleo n˜ao ´e apenas uma das principais fontes de energia utilizadas pela humanidade. Al´em de sua importˆancia como fornecedor de energia, os seus derivados s˜ao a mat´eria-prima para a manufatura de in´umeros bens de consumo, e, deste modo, tˆem um papel cada dia mais presente e relevante na vida das pessoas (MARIANO, 2001).
A concep¸c˜ao de um mundo sem as comodidades e benef´ıcios oferecidos pelo petr´oleo implicaria na necessidade de uma total mudan¸ca de mentalidade e h´abitos por parte da popula¸c˜ao, numa total reformula¸c˜ao da maneira como a nossa sociedade funciona ( MA-RIANO, 2001). A aplica¸c˜ao de t´ecnicas de remo¸c˜ao de contaminantes t´oxicos contribuir´a para a melhoria da qualidade da ´agua obtida ao final do processo colaborando para a redu¸c˜ao do impacto ambiental provocado pelo descarte da ´agua produzida.
Figura 1 - Fluidos encontrados no petr´oleo. Fonte: (THOMAS,2001)
A quantidade de ´agua associada ao ´oleo pode variar bastante ao longo da vida econˆo-mica dos po¸cos e pode ser da ordem de 50% e at´e pr´oximo de 100% (THOMAS,2001). O termo ´agua produzida est´a relacionado a toda ´agua proveniente de uma forma¸c˜ao geol´o-gica, injetada ou n˜ao, e que carrega consigo consider´avel teor de ´oleo em sua composi¸c˜ao (FERNANDES J ´UNIOR, 2002).
Apesar de a ´agua estar sempre presente nas rochas dos reservat´orios ela nem sempre est´a em quantidade suficiente para deslocar-se. Existe um n´ıvel de satura¸c˜ao m´ınima e que quando acontece h´a fluxo de ´agua a partir da rocha. A ´agua produzida tamb´em pode ter origem a partir de aq¨u´ıferos subterrˆaneos que podem estar adjacentes `as forma¸c˜oes de hidrocarbonetos.
As causas para a produ¸c˜ao de ´agua contida nos reservat´orios est˜ao relacionadas com a perfura¸c˜ao de po¸cos na interface entre ´agua e ´oleo, o avan¸co da frente de ´agua at´e a coluna produtora em po¸cos produtores, falha no revestimento do po¸co, e recupera¸c˜ao secund´aria, decorrente da inje¸c˜ao de ´agua no reservat´orio para manter ou aumentar a produ¸c˜ao (MEDEIROS et al., 2010).
1.4 Organiza¸c˜ao do Texto
2 M´ETODOS DE SEPARA ¸C ˜AO ´AGUA, ´OLEO E G ´AS
2.1 M´etodos de Separa¸c˜ao
A Separa¸c˜ao efetiva de fluidos produzidos na extra¸c˜ao de ´oleo tem sido por muito tempo um grande desafio na ind´ustria do petr´oleo (BEHIN; AGHAJARI, 2008). Ap´os re-tirados do po¸co, os fluidos produzidos na extra¸c˜ao s˜ao transferidos para um sistema de separa¸c˜ao (PETROBRAS,2000).
Mesmo que a separa¸c˜ao entre os componentes contidos no petr´oleo ocorra em esta-¸c˜oes ou na pr´opria unidade de produ¸c˜ao ´e necess´ario processar e refinar a mistura prove-niente da rocha do reservat´orio, com o objetivo de obter seus subprodutos (PETROBRAS, 2000).
Um dos grandes problemas encontrados na ind´ustria de petr´oleo ´e a grande quanti-dade de ´agua extra´ıda juntamente com o petr´oleo, que precisa ser tratada para o posterior descarte ao meio ambiente, seguindo as especifica¸c˜oes dos ´org˜aos regulamentadores. Po-r´em, a maioria dos m´etodos de separa¸c˜ao ´agua-´oleo tem um n´umero limitado de aplica¸c˜oes em raz˜ao de seu custo operacional, baixa eficiˆencia e demora no processamento do fluido (BEHIN; AGHAJARI,2008). Dentre as v´arias t´ecnicas de separa¸c˜ao entre ´agua e ´oleo as prin-cipais s˜ao a flota¸c˜ao, m´etodos gravitacionais como o separador trif´asico e hidrociclones, tratamentos qu´ımicos, m´etodos que utilizam membranas, tratamentos biol´ogicos, e com-bina¸c˜oes entre as t´ecnicas citadas. A figura2mostra o m´etodo de separa¸c˜ao gravitacional utilizado na ind´ustria.
As plantas utilizadas na ind´ustria, no tratamento prim´ario de separa¸c˜ao entre g´as, ´agua e ´oleo, como mencionado anteriormente, podem utilizar tecnologias baseadas em de-cantadores gravitacionais. Num sistema convencional a separa¸c˜ao de fases ´e realizada por separadores gravitacionais seguidos de baterias de hidrociclones com no exemplo mostrado na figura 2.
2.1.1 Vasos separadores
Figura 2 - Sistema de separa¸c˜ao prim´ario do petr´oleo. Fonte: (FILGUEIRAS,2005)
figura3 mostra um sistema de separa¸c˜ao trif´asico instalado em campo.
Figura 3 - Sistema de Separa¸c˜ao Trif´asica. Fonte: (PINTO,2009)
Como pode ser visualizado, o separador ´e basicamente um cilindro na horizontal que recebe os fluidos produzidos e os separa. Os separadores s˜ao divididos internamente em duas cˆamaras:
• Cˆamara de ´oleo. Esta recebe a fase oleosa da cˆamara de separa¸c˜ao.
As cˆamaras s˜ao separadas de tal forma a possibilitar que a fase aquosa seja acumu-lada na primeira cˆamara e a passagem de fase oleosa para a outra, conforme mostra a figura4.
Figura 4 - Sistema de Separa¸c˜ao Trif´asica. Fonte: (SILVEIRA,2006)
Como ´e poss´ıvel perceber na figura 4 nesse sistema de separa¸c˜ao existe um fluxo de uma entrada e trˆes de sa´ıdas. Devido a presen¸ca das trˆes vari´aveis de sa´ıda, ´agua ´oleo e g´as, ´e necess´ario observar os n´ıveis de ´agua, ´oleo e a press˜ao exercida pelo g´as no recipiente, para que o sistema permane¸ca est´avel. Al´em disso, na pr´atica existem alguns problemas que podem dificultar o controle de tais vari´aveis que segundo Silveira (2006) s˜ao:
• A presen¸ca de espumas;
• Obstru¸c˜ao da tubula¸c˜ao por presen¸ca de parafinas;
• Areia agregada ao fluido de entrada;
• Emuls˜oes;
Outro elemento importante e que tamb´em pode dificultar o controle nos vasos se-paradores s˜ao as golfadas que s˜ao geradas a partir do fluido que chega ao separador, que ´e constitu´ıdo de fases dispersas de ´agua, ´oleo e g´as. A evolu¸c˜ao do escoamento do fluido passa por uma instabilidade de fluxo que pode ocorrer a baixas vaz˜oes em linhas relativa-mente longas devido a um arranjo do conjunto linha-riser desfavor´avel (SILVEIRA, 2006). A forma¸c˜ao das golfadas ´e ilustrada na figura5.
Figura 5 - Forma¸c˜ao das golfadas. Fonte: (SILVEIRA,2006)
A figura mostra que esporadicamente ocorre o bloqueio na base do riser, provocado pelo ac´umulo do fluido que escoa atrav´es da tubula¸c˜ao, retendo o g´as a montante. Devido a isso uma bolha de g´as se forma e penetra no riser, empurrando o l´ıquido acumulado at´e o topo (SILVEIRA,2006).
Figura 6 - Esquema de Vari´aveis de Separador Trif´asico. Fonte: Adaptado de (LIMA et al.,2005)
Em que:
• Gin - vaz˜ao de entrada da fase gasosa;
• Lin - vaz˜ao de entrada da fase oleosa;
• Win - vaz˜ao de entrada da fase aquosa;
• Gout - vaz˜ao de sa´ıda da fase gasosa;
• Lout - vaz˜ao de sa´ıda da fase oleosa;
• Wout - vaz˜ao de sa´ıda da fase aquosa;
• hl - altura da fase oleosa na cˆamara de ´oleo;
• ht - altura total de l´ıquido na cˆamara de separa¸c˜ao;
• hw - altura da fase aquosa na cˆamara de separa¸c˜ao;
• Lweir - vaz˜ao na chicana;
• p - press˜ao no separador;
• sg - fra¸c˜ao de abertura da v´alvula de g´as;
• sl - fra¸c˜ao de abertura da v´alvula de ´oleo;
• Vlfwcs - volume de ´agua na fase aquosa da cˆamara de separa¸c˜ao;
• Vwflcl - volume de ´agua na fase oleosa da cˆamara de ´oleo;
• Vwflcs - volume de ´agua na fase oleosa da cˆamara de separa¸c˜ao.
Devido `a separa¸c˜ao que h´a entre a regi˜ao de entrada de fluido e a regi˜ao de sa´ıda de ´oleo por uma chicana de altura determinada, podem ser observados dois comportamentos que regem a modelagem desse segmento do sistema de separa¸c˜ao. O primeiro acontece quando a altura da fase oleosa na cˆamara de ´oleo ´e inferior a altura da chicana, corres-pondente a opera¸c˜ao normal do sistema, e o segundo quando a altura da fase oleosa ´e superior a altura da chicana. Ambos os comportamentos est˜ao presentes no apˆendice A.
2.1.2 Hidrociclones
Originalmente os hidrociclones foram desenvolvidos com o objetivo de separar subs-tˆancias l´ıquidas das s´olidas. Ap´os v´arios estudos foram realizadas modifica¸c˜oes e, assim, desenvolvido um equipamento para separar l´ıquidos de densidades diferentes, utilizando-se dos mesmos princ´ıpios que os da separa¸c˜ao entre s´olidos e l´ıquidos.
Figura 7 - Diagrama de Vari´aveis no Hidrociclone. Fonte: (LIMA et al.,2005)
A figura 7 mostra um hidrociclone, com legendas ilustrando por onde entram as substˆancias a serem separadas (neste caso a ´agua e ´oleo), e por onde saem as substˆancias j´a separadas. Nele, o fluido passa pela entrada de ´agua oleosa (Alimenta¸c˜ao) de maneira que, devido a estrutura interna do hidrociclone, ´e gerado um campo centr´ıfugo, que rotaciona o fluido no interior do hidrociclone, que potencializa o efeito gravitacional fazendo com que o ´oleo saia pelo orif´ıcio superior e a ´agua pelo inferior.
Uma das principais preocupa¸c˜oes em rela¸c˜ao `a separa¸c˜ao de uma fase dispersa l´ıquida ´e o cuidado que se deve ter para evitar a quebra das got´ıculas do fluido a ser separado, o que contribuiria negativamente para a separa¸c˜ao, pois got´ıculas menores apresentam menores velocidades de migra¸c˜ao no campo centr´ıfugo. Para isso, evitam-se regi˜oes de grandes turbulˆencias, que acarretariam em altas tens˜oes de cisalhamento nas got´ıculas (FILGUEIRAS, 2005).
Os hidrociclones promovem separa¸c˜ao por diferen¸ca de densidade, pois ocorre um fenˆomeno de fluxo reverso por mudan¸ca do gradiente de press˜ao radial num certo ponto, nas proximidades do eixo. Uma exemplifica¸c˜ao das rela¸c˜oes descritas para o modelo dinˆa-mico do hidrociclone pode ser visualizada na figura8 que ilustra as entradas de press˜ao e vaz˜ao de entrada,P1 eq, com as sa´ıdas superiores de press˜ao e vaz˜ao, Po,Wo, e inferiores
de press˜ao e vaz˜ao,Pu,Wu controladas pelas v´alvulas de fluxo So e Su.
Figura 8 - Esquema Dinˆamico em Hidrociclone. Fonte: (FILGUEIRAS,2005)
Figura 9 - Esquema de Hidrociclones em S´erie. Fonte: (SILVEIRA,2006)
A este modelo s˜ao adicionadas v´alvulas de sa´ıda superior dos hidrociclones BOW, PDC, DC e na sa´ıda inferior de DC com o objetivo de controlar o n´ıvel de ´agua do separador conforme ilustrado na figura10 formando o sistema completo a ser modelado.
Figura 10 - Conjunto de Separador com trˆes Hidrociclones. Fonte: (TEIXEIRA,2010)
adaptado em Filgueiras (2005) e Silveira (2006), para a estimativa de sua eficiˆencia ´e utilizado neste trabalho e pode ser observado no apˆendiceB.
2.2 Sistema de Eleva¸c˜ao Artificial de Petr´oleo por G´as-Lift
O sistema de tratamento prim´ario recebe os fluidos retirados de po¸cos de petr´oleo para que assim seja poss´ıvel separ´a-los e posteriormente utiliz´a-los para seus devidos fins. Os m´etodos de eleva¸c˜ao artificial maximizam a produ¸c˜ao de po¸cos e, conseq¨uentemente, o retorno financeiro do projeto de produ¸c˜ao.
O m´etodo de g´as-lift cont´ınuo, utilizado na proposta de Teixeira (2010), ´e conside-rado bastante vers´atil, e pode ser aplicado a po¸cos de com uma variedade de caracter´ıs-ticas. Basicamente o sistema consiste de:
• Fonte de g´as de alta press˜ao;
• Um sistema de controle de inje¸c˜ao de g´as;
• Equipamentos para separa¸c˜ao e armazenamento dos fluidos produzidos (separa-dor).
Figura 11 - Esquema de Eleva¸c˜ao Cont´ınua . Fonte: (TEIXEIRA,2010)
3 IDENTIFICA ¸C ˜AO
Realizar observa¸c˜oes a partir das percep¸c˜oes ao nosso redor ´e uma atividade natural dos seres vivos. A informa¸c˜ao adquirida ´e diversa e consiste em, por exemplo, sinais so-noros ou imagens. Ela ´e processada e utilizada para criar um modelo particular aplic´avel `aquela situa¸c˜ao. Esse ato de construir um modelo a partir de observa¸c˜oes ´e inerente `a na-tureza humana e desempenha um importante papel na tomada de decis˜oes (VERHAEGEN; VERDULT, 2007).
Criar um modelo a partir de fenˆomenos observados tamb´em consiste em uma tarefa importante em v´arios ramos da ciˆencia. Nesse caso, em lugar das percep¸c˜oes atrav´es dos 5 sentidos, as observa¸c˜oes cient´ıficas s˜ao comumente realizadas atrav´es das medidas de instrumentos ou sensores. Os dados medidos a partir desses sensores normalmente necessitam ser processados auxiliando a tomada de decis˜oes, validando um experimento, ou fornecendo novas informa¸c˜oes sobre o processo analisado. Esses dados s˜ao utilizados como base para a elabora¸c˜ao de modelos matem´aticos que descrevem as propriedades dinˆamicas do sistema. Os M´etodos de identifica¸c˜ao de sistemas s˜ao aqueles que podem ser utilizados para construir modelos matem´aticos a partir desses dados (VERHAEGEN; VERDULT, 2007).
Consequentemente, pode-se concluir que identifica¸c˜ao de sistemas ´e o campo da modelagem matem´atica de sistemas realizada a partir de dados experimentais. Em termos t´ecnicos, a id´eia de identifica¸c˜ao de sistemas foi primeiramente utilizada por Zadeh(1962) em seu trabalho ”From circuit theory to system theory” (ZHU, 2001).
Entendida a id´eia principal que envolve a identifica¸c˜ao ´e necess´aria a realiza¸c˜ao de alguns passos com o intuito de aplic´a-la na obten¸c˜ao de um modelo matem´atico. Em prin-c´ıpio, um modelo de ordem adequada deve ser definido pela especifica¸c˜ao de propriedades comuns. Ap´os, os parˆametros desse modelo devem ser adaptados de maneira a minimizar uma fun¸c˜ao baseada no erro, chamada fun¸c˜ao de custo. Depois de identificado o modelo, ou finalizada a adapta¸c˜ao de seus parˆametros, o pr´oximo passo ´e a valida¸c˜ao desse modelo. Nesse ultimo passo o modelo ´e testado com a inten¸c˜ao de confirmar se ´e bom o suficiente para a representa¸c˜ao do sistema (ZHU, 2001).
de dados a serem identificados.
3.1 Identifica¸c˜ao em Malha Fechada
Em certas aplica¸c˜oes o processo somente pode ser identificado em malha fechada. Por exemplo nos sistemas biol´ogicos e econˆomicos o controlador ´e integrado e de forma alguma pode ser desvencilhado do processo. Em sistemas mais t´ecnicos, como no controle adaptativo, o modelo do processo deve ser adaptado enquanto a malha est´a fechada. Al´em disso, processos com a¸c˜ao integral normalmente tem seu funcionamento em regi˜oes con-fi´aveis apenas controlados em malha fechada, lidando melhor com perturba¸c˜oes externas ao sistema (ISERMANN; MUNCHHOF, 2011).
Raz˜oes de produ¸c˜ao, que n˜ao permitem a remo¸c˜ao dos controlado-res durante os experimentos de identifica¸c˜ao, e raz˜oes de seguran¸ca principalmente em processos inst´aveis, n˜ao-lineares ou com carac-ter´ısticas integradoras, estimulam o uso da identifica¸c˜ao em malha fechada. Esta tem como objetivo construir um modelo do processo usando dados coletados sob condi¸c˜oes de controle por realimenta¸c˜ao (total ou parcial).
Gomes (2009)
A quest˜ao de identifica¸c˜ao em malha fechada foi bastante discutida nos anos 70, como uma alternativa de identifica¸c˜ao que substitu´ısse a em malha aberta (Miranda, 2005). Por´em, por alguma raz˜ao, os trabalhos dos anos 70 pararam nas quest˜oes de iden-tificabilidade como, por exemplo, que condi¸c˜oes fazem com que os parˆametros convirjam para os corretos. A influˆencia de condi¸c˜oes experimentais como a influˆencia da polariza-¸c˜ao em modelos complexos, e variˆancia assint´otica n˜ao tinham sido resolvidos (GEVERS, 2003).
Uma li¸c˜ao importante, que emergiu do estudo da rela¸c˜ao entre identifica¸c˜ao e con-trole, nessa ´epoca, foi o benef´ıcio que a identifica¸c˜ao em malha fechada proporciona quando o modelo ´e utilizado para projetos de controle. Em geral, a identifica¸c˜ao em malha fechada reduz o problema de dire¸c˜ao no ganho, devido `a produ¸c˜ao das correla¸c˜oes necess´arias nas entradas produzidas pelo controlador para excitar as sa´ıdas (Andersen e Kummel(1992); Jacobsen(1994); Li e Lee (1996)).
Os principais m´etodos de identifica¸c˜ao em malha fechada s˜ao: o Direto, que consiste na aplica¸c˜ao direta dos m´etodos de erro de predi¸c˜ao aos dados experimentais de entrada e sa´ıda do processo ignorando os efeitos da realimenta¸c˜ao; Indireto, que pode ser realizado atrav´es da coleta dos sinais de referˆencia e sa´ıda e determinando o modelo do sistema em malha aberta a partir do seu modelo em malha fechada; e Conjunto de Entrada e Sa´ıda, que utiliza as entradas u e y como sa´ıdas de um sistema que tem por entrada a referˆencia e o ru´ıdo (S¨oDERSTROM; STOICA, 1989). Segundo Gomes (2009) e Alves (2011) existe uma lista de vantagens que cada m´etodo oferece e que ´e descrita na tabela3.
Tabela 3 - Compara¸c˜ao entre os M´etodos de Identifica¸c˜ao em Malha Fechada. Fonte: (GOMES,
2009)
Direto Indireto Conjunto de Entrada/Sa´ıda
Funciona independente da Requer o perfeito conhecimento Fornece estimativa consistente, natureza do controlador, da estrutura do controlador, independente do modelo do ru´ıdo, pode ser usado de forma n˜ao funciona se o controlador desde que o controlador seja LIT direta, requer um modelo apresenta n˜ao-linearidade, (Linear e Invariante no tempo ), adequado, fornece n˜ao ´e necess´ario conhecer a permite realizar identifica¸c˜ao do consistˆencia e ´otima representa¸c˜ao perfeita do modelo da planta, do ru´ıdo e do
precis˜ao, desde que a controlador. modelo do ru´ıdo;
estrutura do modelo contenha o sistema real.
O m´etodo direto proposto por Ljung atua independentemente da complexidade do controlador, o que implica dizer que as caracter´ısticas de realimenta¸c˜ao do sistema n˜ao s˜ao requeridas para que haja convergˆencia correta nos parˆametros. ´E poss´ıvel afirmar que o m´etodo direto ignora a presen¸ca do controlador na malha de controle e permite a utiliza¸c˜ao de algoritmos como se o sistema estivesse operando em malha aberta. Isso torna o m´etodo direto mais simples que os demais, j´a que nenhum tipo de processamento ´e necess´ario, apenas o conhecimento das vari´aveis de entrada e sa´ıda do processo (RACOSKI, 2009).
Outra propriedade importante no m´etodo direto de estima¸c˜ao de parˆametros em malha fechada ´e que mesmo que o sistema seja inst´avel em malha aberta, ele pode ser utilizado desde que seja utilizado um controlador que torne o sistema est´avel em malha fechada. Com isso, ´e poss´ıvel utilizar modelos polinomiais ARX, NARX, ARMAX, e NARMAX (FORSSELL, 1999).
3.1.1 Identificabilidade do M´etodo Direto
analisadas as propriedades de identificabilidade para modelos polinomiais, levando em considera¸c˜ao um sistema sem a presen¸ca de ru´ıdos e na ausˆencia e presen¸ca de sinais externos para a excita¸c˜ao do sistema.
A conclus˜ao segundo S¨oderstrom e Stoica (1989), ´e que uma maneira simples de garantir a identificabilidade de um sistema ´e:
• Utilizar uma entrada externa, por exemplo umsetpoint variante no tempo.
• Utilizar um regulador que alterne entre diferentes configura¸c˜oes durante o expe-rimento de identifica¸c˜ao.
Dessa maneira, ou o regulador dever´a ter alta ordem em rela¸c˜ao ao sistema, de maneira a fazer oscilar a sa´ıda do sistema real, ou um sinal externo deve ser aplicado com o intuito de excitar a planta de maneira que ela forne¸ca informa¸c˜oes suficientes para a identifica¸c˜ao.
3.2 Estima¸c˜ao de Parˆametros com Modelos Polinomiais NARX
Os sistemas n˜ao lineares s˜ao todos aqueles que n˜ao satisfazem o princ´ıpio da su-perposi¸c˜ao. Em princ´ıpio todos os sistemas s˜ao n˜ao lineares. Sua dinˆamica normalmente depende da amplitude do sinal de entrada assim como do ponto de opera¸c˜ao (AGUIRRE, 2007).
As equa¸c˜oes que regem o sistema de separa¸c˜ao trif´asico e hidrociclones s˜ao n˜ao lineares, como percebido nos apˆendicesA, B, e C, e, portanto, ´e interessante utilizar uma abordagem na identifica¸c˜ao que favore¸ca a representa¸c˜ao de tal sistema de maneira a reproduzir sua dinˆamica.
Para que seja poss´ıvel representar um sistema f´ısico al´em de excit´a-lo com um si-nal adequado, tamb´em ´e necess´aria a utiliza¸c˜ao de um modelo matem´atico. A estrutura desse modelo representar´a o comportamento dinˆamico do sistema identificado. Para o caso de sistemas cujo comportamento possui caracter´ısticas n˜ao lineares, fun¸c˜oes lineares s˜ao insuficientes para represent´a-los.
Dentre os modelos para identifica¸c˜ao de sistemas n˜ao lineares destacam-se as clas-ses de modelos polinomiais n˜ao lineares baseadas em auto-regress˜ao com m´edia m´ovel e entrada ex´ogena (NARMAX). Problemas de sistemas n˜ao lineares podem ser adequa-damente representados com tais estruturas (AGUIRRE et al., 1998). Sua estrutura ´e dada por uma fun¸c˜ao n˜ao linear, seguindo o modelo encontrado em Aguirre et al. (1998), que relaciona as entradas, sa´ıdas e o erro como mostra a equa¸c˜ao 3.1.
y(k) = Fl(y(k−1), y(k−2), ..., y(k−n
y), u(k−d), u(k−d−1), ...,
u(k−d−nu+ 1), e(k−1), e(k−2), ..., e(k−ne)) +e(k)
Onde:
Fl - ´E uma fun¸c˜ao n˜ao linear qualquer; u - Fun¸c˜ao de entradas;
y - Fun¸c˜ao de sa´ıdas; e - Res´ıduo;
d - Atraso de transporte do sistema;
nu - Atraso m´aximo da entrada que influˆencia o modelo;
ny - Atraso m´aximo da sa´ıda que influˆencia o modelo;
ne - Atraso m´aximo do vetor de res´ıduos que influˆencia o modelo.
A fun¸c˜ao n˜ao linear mostrada na equa¸c˜ao 3.2 denota um modelo NARX (sem a inclus˜ao do erro de estima¸c˜ao). Ela consiste em um modelo que relaciona todas as entradas e sa´ıdas do sistema de maneira que hajal agrupamentos de termos. Em suma ela ´e uma rela¸c˜ao que a partir da quantidade de atrasos emye emu, do atraso de transported, e do grau de n˜ao linearidadel, gera combina¸c˜oes de termos n˜ao lineares formando um modelo polinomial mais geral poss´ıvel, dentro das limita¸c˜oes citadas.
y(k) =Pl
m=0 Pm
p=0
Pny,nu
n1,nmcp,m−p(n1, ..., nm) Qp
i=1y(k−ni)Qim=p+1u(k−ni) (3.2)
Onde:
l - Grau de n˜ao linearidade; c- Parˆametro do modelo;
p, m - Termos auxiliares para a combina¸c˜ao entre y e u; n1,nm - ´Indices das constantes que multiplicam o polinˆomio.
Ap´os determinar o modelo, pelo qual se deseja aproximar o sistema, ´e necess´ario estimar os parˆametros baseado nos sinais de entrada e sa´ıda do sistema. ´E v´alido ressaltar que para a estrutura baseada em modelos NARX apenas o modelo ´e n˜ao linear. Ou seja, o modelo, a ser estimado, ´e linear nos parˆametros e, portanto, pode ser estimado utilizando m´etodos lineares.
Para estruturar as entradas e sa´ıdas de maneira a facilitar a identifica¸c˜ao utilizou-se a equa¸c˜ao3.3 representada na forma matricial conforme a equa¸c˜ao 3.4.
Y =PΘ + Ξ (3.3)
Onde:
P =
y(k−1) ··· y(k−ny) u(k−d) ··· u(k−d−nu) y(k−1)u(k−d) ··· y(k−1)l1u(k−d)l2
y(k) ··· y(k−ny+1) u(k−d+1) ··· u(k−d−nu+1 y(k)u(k−d+1)) ··· y(k)l1u(k−d+1)l2
... ... ... ... ... ... ... ... ...
y(k−1+n) ··· y(k−ny+n)u(k−d+n) ··· u(k−d−nu+n)y(k−ny+n)u(k−d+n) ··· y(k−ny+n)l1u(k−d+n)l2
(3.4) Onde: l1 e l2 - Assumem valores de maneira a gerar todas as combina¸c˜oes de n˜ao linearidade representadas na equa¸c˜ao3.2.
Y - O vetor composto por todas as sa´ıdas do sistema;
Y =hy(1) y(2) · · · y(n)i (3.5)
Ξ - O vetor composto pelos res´ıduos do sistema;
Ξ =hξ(1) ξ(2)· · ·ξ(n)i (3.6)
N - N´umero m´aximo de amostras; Θ - O vetor de parˆametros;
Θ =hθ(1) θ(2)· · ·θ(Nθ−1)
i
(3.7)
Nθ - N´umero de parˆametros do sistema que ´e igual ao n´umero de colunas de P.
Na equa¸c˜ao3.8 ´e definido o s´ımbolo do res´ıduo, que ´e a diferen¸ca entre a sa´ıda real e a sa´ıda estimada 3.8.
ξ=y(k)−yˆ(k, θ) (3.8)
O vetor de sa´ıdas estimadas ´e definido conforme a equa¸c˜ao 3.9.
ˆ
Y (θ) = PΘˆ (3.9)
O vetor de parˆametros estimados ˆΘ ´e definido como:
ˆ
Θ =hθˆ(1) ˆθ(2)· · ·θˆ(Nθ−1)
i
(3.10)
Os parˆametros do modelo podem ser estimados de maneira a minimizar a fun¸c˜ao de custo mostrada na equa¸c˜ao 3.11.
Jn(θ) = N1ΞTΞ (3.11)
Onde:
Jn - fun¸c˜ao a ser minimizada;
3.2.1 ERR - Error Reduction Ratio
´
E poss´ıvel perceber que, at´e ent˜ao, foram definidos a fun¸c˜ao n˜ao linear que representa um determinado sistema (3.2), a matriz de regressores P (3.4), o vetor de parˆametros Θ (3.7) e a fun¸c˜ao objetivo Jn (3.11), que s˜ao os elementos necess´arios para a realiza¸c˜ao
da estima¸c˜ao de parˆametros. Por´em, na configura¸c˜ao disposta, seriam utilizados todos os regressores gerados na equa¸c˜ao3.2, e, para tal caso, ´e assumido que os regressores deter-minados s˜ao vari´aveis independentes, ou seja, todos fazem parte do modelo (AGUIRRE, 2007). Nesta subse¸c˜ao ser´a definido o crit´erio chamado taxa de redu¸c˜ao de erro, que poder´a ser utilizado na determina¸c˜ao dos regressores pertinentes ao modelo.
A taxa de redu¸c˜ao do erro, proveniente do inglˆes error reduction ratio ou ERR, ´e um crit´erio utilizado na detec¸c˜ao de estrutura que pode ser aplicado aos modelos NARX polinomiais. O objetivo desta t´ecnica ´e reduzir o erro causado por mau condicionamento num´erico atrav´es da indica¸c˜ao do termo mais pertinente ao modelo e ortogonalizando os demais em rela¸c˜ao a estes mais importantes.
Seguindo os conceitos descritos em Aguirre (2007) para defini¸c˜ao do ERR, ser´a considerado o seguinte modelo NARX geral, mostrado na equa¸c˜ao 3.12.
y(k) = PT(k−1)ˆθ+ξ(k) =Pnθ
i=1θˆipk,i(k−1) +ξ(k) (3.12)
E o seguinte modelo auxiliar:
y(k) = Pnθ
i=1ˆgiωi(k−1) +ξ(k) (3.13) Em que os regressores ωi, da equa¸c˜ao3.13, s˜ao ortogonais sobre os dados, ou seja:
hωiωki= N1 PNk=1ωi(k)ωk(k) = 0,∀i6=k (3.14)
A soma dos valores quadr´aticos de y(t) ´ehy, yi ou yTy, e a partir da equa¸c˜ao 3.13 ´e
poss´ıvel obter:
y(k)2 = Pnθ
i=1ˆgiωi(k−1) +ξ(k)
!
× Pnθ
i=1gˆiωi(k−1) +ξ(k)
!
(3.15)
Tomando o valor m´edio de 3.15´e poss´ıvel obter a equa¸c˜ao 3.16
y(k)2 =Pnθ
i=1gˆ2i hωi, ωii+hξ, ξi (3.16)
(AGUIRRE,2007), e a parcela que n˜ao foi explicada pelos regressores ´e equivalente a soma do quadrado do vetor de res´ıduos.
De acordo com essa id´eia ´e poss´ıvel quantificar a importˆancia de cada regressor individualmente e se for acrescido o i-´esimo termo, a ERR pode ser expressa como uma fra¸c˜ao da soma dos valores quadr´aticos dos dados segundo a equa¸c˜ao3.17.
[ERR]i =
ˆ
g2 ihωi,ωii
hy,yi (3.17)
Segundo Aguirre(2007) um crit´erio para ajudar a escolher os regressores do modelo ´e incluir aqueles com maior valor de ERR, dentre um grande conjunto de regressores candidatos.
3.2.2 AIC - (Akaike information criterion)
Um problema comum na ´area de processamento de sinais ´e determinar um modelo compat´ıvel para descrever ou caracterizar uma quantidade de dados experimentais. Essa determina¸c˜ao consiste em duas tarefas, a sela¸c˜ao apropriada da estrutura do modelo e a es-tima¸c˜ao de parˆametros (SEGHOUANE,2006). A sele¸c˜ao da estrutura do modelo, por exem-plo, estatisticamente ´e essencial, pois o modelo pode facilmente ser super-parametrizado simplesmente pelo aumento de termos atrasados nas sa´ıdas, entradas, erros, ou at´e pelo aumento do grau das n˜ao linearidades. Em geral, esse modelo se torna mais complexo do que o necess´ario e provavelmente mal condicionado numericamente. Contudo, detectar a estrutura de um modelo n˜ao linear n˜ao ´e t˜ao mais complicado do que determinar a de um sistema linear (MRABET et al., 2003).
Distribui¸c˜oes de probabilidade s˜ao a forma usual de se expressar um modelo na modelagem estat´ıstica. Por isso, o modelo pode ser avaliado por similaridades de uma distribui¸c˜ao de probabilidade especificada em rela¸c˜ao a verdadeira distribui¸c˜ao de proba-bilidade que foi gerada nos dados de medi¸c˜ao (YEN; WANG,1998).
Seja y = (y1, y2, ..., yn) a realiza¸c˜ao de um vetor aleat´orio e Y = (Y1, Y2, ..., Yn) o
vetor com a verdadeira, por´em desconhecida, distribui¸c˜ao G(y). Suponhamos que existe o desejo de se aproximar G(y) por um modelo F(y, θ), onde θ ´e um vetor de dimens˜oes finitas de parˆametros desconhecidos. A possibilidade de adequa¸c˜ao do modelo postulado pode ser medida apropriadamente por crit´erios de informa¸c˜ao (YEN; WANG, 1998).
essa id´eia pode ser visualizada em3.18
AIC = N ln(ˆρp) + 2Np (3.18)
Onde:
AIC - crit´erio de sele¸c˜ao sugerido por Akaike. N - N´umero de amostras;
p - o n´umero de parˆametros do modelo; ˆ
ρp - ´e a variˆancia estimada do ru´ıdo branco de entrada do processo para o modelo
de ordem p.
Se a distribui¸c˜ao de predi¸c˜oes ´e definida pelo modelo com parˆametros determinados pelo m´etodo de m´axima verossimilhan¸ca, a verossimilhan¸ca ´e dada pela equa¸c˜ao 3.18, o que ´e equivalente ao crit´erio de informa¸c˜ao de AKAIKE. Portanto, o m´ınimo valor de AIC, procedimento que seleciona a ordem do modelo, ´e um procedimento de sele¸c˜ao por m´axima verossimilhan¸ca de predi¸c˜ao.
3.2.3 M´etodo dos M´ınimos Quadrados Recursivo
Para que seja poss´ıvel a minimiza¸c˜ao de uma fun¸c˜ao em rela¸c˜ao a uma vari´avel θ qualquer, um m´etodo ou algoritmo deve ser utilizado. Em princ´ıpio, foi explicado como se estruturam os modelos NARMAX (3.1) e NARX (3.2). Ap´os, foram definidas formas para minimiza¸c˜ao do erro causado por mau condicionamento num´erico (3.17) e, em seguida, crit´erios para indicar a quantidade de termos pertinentes ao modelo (3.18).
Tendo definido a estrutura do modelo ´e poss´ıvel estimar os parˆametros do modelo de maneira mais r´apida e com boa correla¸c˜ao entre os dados do modelo. Para isso, podem ser utilizados estimadores baseados em m´ınimos quadrados.
O estimador de m´ınimos quadrados analisa as propriedades de uma vari´avel aleat´o-ria θ utilizando equa¸c˜ao a diferen¸cas do processo (COELHO; COELHO, 2004), semelhante ao definido na equa¸c˜ao 3.2. As propriedades mais importantes nesse m´etodo s˜ao que o estimador ´e n˜ao polarizado, ou seja, os parˆametros estimados convergem para os verda-deiros quando o n´umero de itera¸c˜oes aumenta, a precis˜ao das estimativas ´e estabelecida pelo valor inicial da matriz de covariˆancia e pelo fato de o res´ıduo ser branco com m´edia nula (LJUNG; S¨oDERSTR¨oM,1983).
Os autores Coelho e Coelho(2004) descrevem um algoritmo simples para estima¸c˜ao em m´ınimos quadrados descrito a seguir:
• Mede-se a sa´ıda e entrada do sistema;
• Atualiza-se o vetor de medidasp (que simboliza cada linha na equa¸c˜ao 3.4);
• Calcula-se o ganho do estimador utilizando-se da equa¸c˜ao 3.19;
K(t) = λ+φ(ptT−1)(t)pφp(t()t) (3.19)
• Calcula-se o vetor de parˆametros estimadosθ como em 3.20;
ˆ
θ(t+ 1) = ˆθ(t) +K(t)ξ(t) (3.20)
• Calcula-se a matriz de covariˆancia como em 3.21;
φ(t) = 1λφ(t−1)−K(t)[φ(t−1)p(t)]T (3.21)
3.2.4 Otimiza¸c˜ao Utilizando PSO
Um dos problemas mais importantes na computa¸c˜ao cient´ıfica ´e na solu¸c˜ao de siste-mas de equa¸c˜oes. Entre eles ´e poss´ıvel citar aproxima¸c˜ao de fun¸c˜oes, solu¸c˜ao de sistesiste-mas n˜ao lineares, condi¸c˜oes de contorno entre outras (SANTOS; SILVA,2006). Em problemas de otimiza¸c˜ao ´e poss´ıvel perceber que freq¨uentemente est´a envolvida a procura de m´ınimo ou m´aximo global. Algumas vezes uma rela¸c˜ao matem´atica pode n˜ao ser encontrada e para se obter os valores de uma fun¸c˜ao ´e necess´ario efetuar uma experiˆencia ou uma seq¨uˆencia de c´alculo. Isto significa que, nesse caso, ´e necess´ario manter o n´umero de estimativas com erro m´ınimo (BAJPAI et al., 1978).
A seguir ser´a abordado o algoritmo b´asico de PSO (Particle Swarm Optimization) cujo objetivo ´e a procura de um m´ınimo e que pode ser aplicado em problemas de identi-fica¸c˜ao, sintonia de controladores e para controlar sistemas. Esses algoritmos ser˜ao utili-zados neste trabalho para otimizar os resultados obtidos com as t´ecnicas de estima¸c˜ao de parˆametros tradicionais e para a sintonia dos controladores escolhidos.
O PSO ´e uma t´ecnica estoc´astica baseada em popula¸c˜oes cuja inspira¸c˜ao ´e o com-portamento social dos p´assaros e peixes. Ele foi inicialmente introduzido por Kennedy e Eberhart (1995). Nesse algoritmo cada part´ıcula ajusta sua trajet´oria em dire¸c˜ao a seu melhor ´ındice, obtido na itera¸c˜ao anterior. As part´ıculas est˜ao dispersas em um espa¸co de busca multidimensional, onde a posi¸c˜ao de cada part´ıcula ´e ajustada de acordo com sua pr´opria experiˆencia e a de seus vizinhos. A busca do melhor ´ındice ´e continuada at´e que seja percebido um estado relativamente est´atico ou que extrapole os limites computacio-nais (MALIK et al., 2007).
O algoritmo b´asico para otimiza¸c˜ao utilizando PSO pode ser observado a seguir:
• Inicializar a popula¸c˜ao de part´ıculas com posi¸c˜oes e velocidades randˆomicas no d-´esimo espa¸co de busca do problema.
• Comparar as avalia¸c˜oes escolhendo a part´ıcula com menor ´ındice (M).
• Comparar a avalia¸c˜ao de cada part´ıcula com sua anterior e substituir pela melhor (PM).
• Atualizar a velocidade e posi¸c˜ao das part´ıculas de acordo com as equa¸c˜oes 3.22 e3.23 respectivamente:
Vik+1 = Vik+1+c1r1(P Mk
i −Xik) +c2r2(Mi−Xik) (3.22)
Onde:
Vik+1 - Velocidade das i part´ıculas no instante k+1; c1, c2 - Constantes de acelera¸c˜ao das part´ıculas;
r1, r2 - N´umeros aleat´orios pertencentes ao intervalo de 0 a 1; M - Part´ıcula cuja fun¸c˜ao objetivo retorna o menor ou maior valor; Xk
i - i Part´ıculas dispersas num espa¸co multidimensional e no instante k;
PM - Vetor com as melhores part´ıculas encontradas desde o instante 0 at´e o k, representando o melhor valor de cada part´ıcula, ou seja um m´ınimo ou m´aximo local.
Xik+1 = Xk i +V
k+1
i (3.23)
Atrav´es das equa¸c˜oes mostradas ´e poss´ıvel perceber que o algoritmo relaciona cada part´ıcula dispersa em um espa¸co, suas velocidades, melhores locais e globais com certa aleatoriedade. Em suma, as part´ıculas est˜ao dispersas no espa¸co, e atrav´es da equa¸c˜ao 3.22 pode-se encontrar a dire¸c˜ao que cada part´ıcula deve se mover, para minimizar ou maximizar a fun¸c˜ao objetivo. Ap´os encontradas as velocidades, elas s˜ao integradas, ou somadas, `as posi¸c˜oes reposicionando as part´ıculas como na equa¸c˜ao3.23.
4 CONTROLE PREDITIVO
O controle preditivo remete a uma classe de controladores que tem por caracter´ıstica principal o uso de um modelo para prever o comportamento futuro de suas vari´aveis con-troladas. O controlador se utiliza dessa informa¸c˜ao para buscar uma resposta otimizada de acordo com um crit´erio pr´e-definido (NUNES,2001). A principal caracter´ıstica do con-trolador preditivo ´e a utiliza¸c˜ao de um modelo de processo utilizado para prever futuras sa´ıdas determinadas por um horizonte de previs˜ao determinado. A figura 12 mostra um esquema de como funciona um controlador preditivo.
Figura 12 - Estrat´egia de Controle Preditivo. Fonte: (NUNES,2001)
No gr´afico apresentado existem dois sinais em fun¸c˜ao do tempo, um respectivo a entrada de controle u(t) e o outro corresponde a sa´ıda do sistema. No instante t s˜ao realizadas ˆy(t+i|t) previs˜oes futuras, que ´e o horizonte de previs˜ao. A partir das previs˜oes s˜ao calculados os sinais de controle futuros, que ´e o horizonte de controle u(t+i).
O controle preditivo, segundo Bai e Coca(2008), ´e uma das estrat´egias de controle mais largamente utilizada devido a utiliza¸c˜ao de um modelo de processo que prediz as respostas futuras de uma planta agregada a capacidade de trabalhar com restri¸c˜oes no sinal de controle aplicado e na sa´ıda. Por´em, os sistemas encontrados nas aplica¸c˜oes de controle s˜ao freq¨uentemente n˜ao lineares, por isso, a maioria dos sistemas de controle preditivo deveriam trabalhar com modelos n˜ao lineares.
sistemas a um ponto de opera¸c˜ao atrav´es do qual o problema pode ser convertido em um sistema linear (SHI et al.,2007).
Para que seja poss´ıvel implementar um controle preditivo que utilize modelos n˜ao lineares existem algumas dificuldades a serem superadas, dentre elas, a baixa exatid˜ao dos preditores baseados em modelos lineares, e uma maneira eficiente para otimiza¸c˜ao da fun¸c˜ao de custo que resulte em estabilidade e robustez (BAI; COCA, 2008)). O modelo matem´atico do Controlador GPC segue como descrito em Yan et al. (2009), e o modelo n˜ao linear para o preditor de n passos a frente ´e o NARX (3.2).
Tendo em vista um modelo n˜ao linear do sistema identificado, o NARX, ´e necess´ario realizar a lineariza¸c˜ao no ponto de opera¸c˜ao. Em um processo recursivo de predi¸c˜ao v´arios passos a frente ´e inevit´avel a existˆencia de diferen¸cas entre as sa´ıdas da predi¸c˜ao e as sa´ıdas futuras reais, por´em essa diferen¸ca ´e minimizada pela existˆencia de um modelo n˜ao linear que foi identificado a partir de dados reais do processo, Yan et al. (2009). Expandindo as sa´ıdas reais do processo em s´eries de Taylor no ponto u(k) = u(k-1), e retendo os termos de primeira ordem ´e poss´ıvel obter:
y(k|k) =Fl(y(k−1), y(k−2), ..., y(k−ny), u(k−d), u(k−d−1), ...,
u(k−d−nu+ 1), e(k−1), e(k−2), ..., e(k−ne)) +e(k)
= ˆy(k|k) +∂∂uˆy(k(k|k))
u(k)=u(k−1)[u(k)−u(k−1)]
(4.1)
Onde:
y(k|k) - predi¸c˜ao de um passo a frente real; ˆ
y(k|k) - predi¸c˜ao de um passo a frente recursiva. Definindo:
g11 = ∂∂uˆy(k(k|k))
u(k)=u(k−1) (4.2)
O sistema pode ser reescrito da seguinte forma:
y(k|k) = ˆy(k|k) +g11[u(k)−u(k−1)] (4.3)
Similarmente ´e poss´ıvel obter a previs˜ao dois passos a frente conforme 4.4.
y(k+ 1|k) = ˆy(k+ 1|k) +g21[u(k)−u(k−1)] +g22[u(k+ 1)−u(k−1)] (4.4)
g21 = ∂yˆ∂u(k+1|(k)k)
u(k+1)=u(k−1)
u(k)=u(k−1) (4.5)
g22 = ∂∂uyˆ(k(k+1|+1)k)
u(k+1)=u(k−1)
u(k)=u(k−1) (4.6)
Generalizando ´e poss´ıvel obter:
y(k+N −1|k) = ˆy(k+N −1|k) +gN1[u(k)−u(k−1)] +· · ·+ gN M[u(k+M −1)−u(k−1)]
(4.7)
Tendo:
gN M = ∂∂uyˆ(k(k++NM−1|−1)k)
u(k+M−1)=u(k−1) ...
u(k)=u(k−1)
(4.8)
Para facilitar a nota¸c˜ao adota-se:
Y = [y(k|k) y(k+ 1|k) · · · y(k+N −1|k)]T (4.9)
ˆ
Y = [ˆy(k|k) ˆy(k+ 1|k) · · · yˆ(k+N −1|k)]T (4.10)
∆U = [∆u(k|k) ∆u(k+ 1|k) · · · ∆u(k+N −1|k)]T (4.11)
Onde:
∆u(k+i) = u(k+i)−u(k+i−1), i= 0,· · ·, M −1 (4.12)
E, G=
g11 0 · · · 0 g21 g22 · · · 0
... ... ... ...
gN1 gN2 ... gN M
, N =M (4.13)
Com isso, a previs˜ao real para as sa´ıdas preditas v´arios passos a frente pode ser escrita na forma vetorial de acordo com a equa¸c˜ao4.14.
Y = ˆY +G∆U (4.14)
de erro mostrado na seguinte equa¸c˜ao:
y(k+N −1|k) = ˆy(k+N −1|k) +gN1[u(k)−u(k−1)] +· · ·+ gN M[u(k+M −1)−u(k−1)] +ψ(N), N =M
(4.15)
Em que:
ψ(N) =y(k)−yˆ(k|k−N), i= 0,· · · , M −1 (4.16)
Para facilitar a nota¸c˜ao o fator de corre¸c˜ao de erro ´e reescrito na forma de um vetor como o explicitado na equa¸c˜ao4.17.
Ψ = [ψ(k) ψ(k+ 1) · · · ψ(k+N −1)]T (4.17)
Portanto, a sa´ıda de previs˜ao real corrigida pode ser reescrita como:
Y = ˆY +G∆U + Ψ (4.18)
A fun¸c˜ao de custo da predi¸c˜ao de v´arios passos utilizada ´e:
J = 1 2
PN
j=1[yr(k+j)−y(k+j|k)]2+ λ2 PMj=1[∆u(k+j−1)]2 (4.19)
Onde:
yr(k+j) - trajet´oria de referˆencia;
N - horizonte de predi¸c˜ao; M - horizonte de controle;
λ - penaliza¸c˜ao do sinal de controle.
Definindo:
Yr = [yr(k) yr(k+ 1) · · · yr(k+N −1)]T (4.20)
Com isso, a fun¸c˜ao de custo em forma vetorial pode ser escrita.
J = 1
2[Yr−Y]
T[Y
r−Y] + λ2∆UT∆U (4.21)
Derivando a fun¸c˜ao de custo em rela¸c˜ao ao sinal U e igualando a zero ´e poss´ıvel obter a varia¸c˜ao do sinal de controle que minimiza a fun¸c˜ao de custo. Esse sinal e dado pela rela¸c˜ao:
∆U = (λI+GTG)−1GT(Y
A partir da derivada do sinal de controle obtida ´e poss´ıvel aplicar o novo sinal de controle, e, assim, o processo ´e repetido.
5 METODOLOGIA
O simulador utilizado neste trabalho ´e resultado de uma parceria da Universidade Federal do Rio Grande do Norte com o grupo de controle da Universidade Federal de Sergipe (UFS) representado pelo Prof. D. Sc. Sotomayor. Nela, foram desenvolvidos um simulador de processos envolvendo o m´etodo de eleva¸c˜ao por Gas-Lift, separa¸c˜ao trif´a-sica, separa¸c˜ao por hidrociclones, identifica¸c˜ao utilizando modelos NARX multi-vari´avel e mono-vari´avel, algoritmos de controle PID (linear) e preditivo utilizando os modelos n˜ao lineares NARX mono-vari´avel e, finalmente, m´etodos de sintonia baseados em PSO, para otimiza¸c˜ao dos controladores e futura compara¸c˜ao. Um diagrama de atividades de-senvolvidas no trabalho pode ser observado na figura 13, este diagrama representa de forma resumida o que foi utilizado, os ´ıtens necess´arios e os algoritmos necess´arios para a realiza¸c˜ao do trabalho.
Figura 13 - Diagrama de atividades do Trabalho.