Faculdade de Engenharia da Universidade do Porto
Desenho de um Amplificador de Áudio Avançado
(Design of an Advanced Audio Amplifier)
João Pedro Gomes Carvalho
Dissertação realizada no âmbito do
Mestrado Integrado em Engenharia Eletrotécnica e de Computadores
Major Automação
Orientador: Diamantino Rui da Silva Freitas (Eng
oDoutor)
ii
iii
Resumo
Desde o início da sua existência que os transístores são usados numa grande e variada lista de aplicações. No que diz respeito à amplificação de áudio, a fama dos amplificadores de classe A, B e A/B é universal e a sua aplicação é feita desde há muito tempo numa grande parte dos dispositivos de áudio. Esta preferência baseia-se essencialmente na boa relação entre eficiência energética e qualidade sonora que promovem. Ainda assim, a discussão no que diz respeito à vantagem das válvulas sobre os transístores nunca teve um fim à vista e dura já há décadas. É de facto verdade que os amplificadores valvulados possuem características incomparáveis e inimitáveis que lhes atribui preferência na amplificação de instrumentos musicais, mas o caso não é propriamente o mesmo no que diz respeito a aparelhagens Hi-Fi. A eficiência energética deste tipo de aparelhos é verdadeiramente modesta e a distorção harmónica que promove as suas famosas características na amplificação de instrumentos, não é um fator visto com bons olhos no que diz respeito ao processo de amplificação de um sinal sonoro da forma mais transparente possível.
Nesta área, os amplificadores a transístores são predominantes e com a constante evolução da tecnologia, chega agora a altura de surgir uma nova classe de amplificadores cuja descrição teórica já existe há décadas, mas apenas atualmente tem as condições necessárias para se impor. Tal é a classe D de amplificadores de áudio e já foi cientificamente comprovado que a sua eficiência energética e qualidade sonora são incomparáveis a qualquer outra classe existente até à data. Contudo, o seu desenvolvimento encontra-se ainda numa fase bastante jovem, de modo que as perspetivas para o futuro da amplificação de áudio estão altas.
Neste seguimento surge a presente dissertação, que pretende compreender, desenhar e implementar um protótipo de um amplificador em classe D, conseguindo esperançosamente fornecer novos pontos de vista e uma contribuição prática para a evolução e desmistificação dos mitos de funcionamento que lhe estão associados.
O objetivo é alcançar um amplificador o mais transparente possível no processo de amplificação, associado a uma muito boa eficiência energética, fator este que é de extrema importância em qualquer tipo de dispositivo avançado.
v
Abstract
Since the beginning of their existence, transistors have been mode and more widely used in a large and distinct group of fields. In audio amplification, the fame of the class A, B and A/B amplifiers is universal, being applied on a great deal of today’s audio devices for a very long time now. This preference is based on the good sound quality they provide, mixed with the relatively good energy efficiency. However, the discussion concerning the advantages of valves versus transistors has never been even close to being over, and it has been around for decades. It is in fact true, that valve amplifiers have incomparable and so far inimitable characteristics on musical instrument amplification, but the case it’s not really the same on what Hi-Fi amplifiers are concerned. This type’s energy efficiency is truly modest and the harmonic distortion that provides their famous characteristics on instrument amplification is not really a good prospect when the point is to amplify a sound signal in the most clear of the ways.
Transistorized audio amplifiers are predominant on this application area, but with the constant evolution of technology, the time has finally come for a class which theory describes for decades, but only now has the means to come forward. Such is the class D audio amplifier, and it has already been scientifically proved that its energy efficiency and sound quality are simply incomparable to any other concurrent class. However its development is still in a rather infant state, so perspectives are really high for the future of audio amplification with class D.
With that line of thought, this dissertation is pointed out to understand, design and develop a class D amplifier prototype, hopping to provide some new insight and practical contribution to its evolution and demystification of functioning myths.
The goal is to achieve a clearly sounding amplifier with ultimately good levels of energy efficiency, which is of prime importance to any kind of advanced device.
vii
Agradecimentos
Quero agradecer ao Engenheiro Doutor Diamantino Freitas por me disponibilizar este tema de dissertação e essencialmente por todo o apoio, confiança e motivação que me incutiu ao longo do trabalho.
Agradeço também ao Tiago Campos pelo interesse, paciência e sugestões que foi dando, principalmente na parte de implementação do protótipo.
À Tita tenho a agradecer a desmesurada paciência que teve comigo nos últimos 5 meses, assim como todo o apoio moral que me deu especialmente nas alturas de maior frustração.
Ao Bino agradeço o inigualável companheirismo e amizade, principalmente nos dias mais difíceis de trabalho.
Por fim, e de maior importância, agradeço aos meus pais por me darem a possibilidade de realizar esta formação que escolhi e por todo o esforço que fizeram, de modo a que nunca me faltassem as condições necessárias para terminar o curso de forma bem sucedida.
ix
Índice
RESUMO ... III ABSTRACT ... V AGRADECIMENTOS ... VII ÍNDICE ... IX LISTA DE FIGURAS ... XI LISTA DE TABELAS ... XV ABREVIATURAS E SÍMBOLOS ... XVIICAPÍTULO 1 ... 1 INTRODUÇÃO ... 1 1.1 Motivação ... 1 1.2 Definição do problema ... 2 1.3 Solução Proposta... 2 1.4 Constituição do documento ... 3 CAPÍTULO 2 ... 5 REVISÃO DA LITERATURA ... 5
2.1 A estrutura de Amplificadores de três andares ... 5
2.2 Classe A ... 6
2.3 Classe B ... 7
2.4 Classe AB ... 9
2.5 Classe G ... 10
2.6 Classe D ... 12
2.6.1 Filtro passa-baixo de saída ... 14
2.6.2 Andar de Potência ... 16
2.6.3 MOSFET ... 19
2.6.4 Andar de modulação ... 21
2.6.4.1 Modulação da Largura de Impulso ... 21
2.6.4.2 Modulação da Densidade de Pulso ... 23
2.6.4.2.1 Modulação ∆... 24
2.6.4.2.2 Modulação ∆Σ ... 25
x
DESENHO E SIMULAÇÃO ... 31
3.1 Definição dos objetivos de performance ... 31
3.2 Desenho do filtro Butterworth passa-baixo de saída ... 32
3.3 Desenho da Ponte H de potência ... 35
3.3.1 Desenho dos MOSFETs ... 35
3.3.2 Desenho do Dissipador de calor dos MOSFETs ... 37
3.3.3 Desenho do Driver dos MOSFETs ... 40
3.4 Desenho do controlo de Dead-Time ... 43
3.5 Desenho do modulador ∆Σ... 47
3.5.1 Modulador ∆Σ de ordem 1 ... 47
3.5.2 Modulador ∆Σ de ordem dois ... 53
CAPÍTULO 4 ... 61
RESULTADOS DA IMPLEMENTAÇÃO PRÁTICA ... 61
4.1 Análise do funcionamento ... 61
4.2 PCB e aspeto final da implementação ... 71
CAPÍTULO 5 ... 73
ANÁLISE DOS RESULTADOS ... 73
5.1 Análise dos resultados da simulação ... 73
5.2 Análise dos resultados da implementação prática ... 74
CAPÍTULO 6 ... 77
CONCLUSÕES, DIFICULDADES SENTIDAS E TRABALHO FUTURO ... 77
6.1 Conclusões e dificuldades sentidas ... 77
6.2 Trabalho futuro ... 78
CAPÍTULO 7 ... 81
ANEXOS ... 81
7.1 Esquema do andar de modulação ΔΣ de ordem 2 ... 82
7.2 Esquema do andar de potência e controlo do dead-time ... 83
xi
Lista de Figuras
FIGURA 2.1–TOPOLOGIA BÁSICA DE UM AMPLIFICADOR DE ÁUDIO DE TRÊS ANDARES [1] ... 5
FIGURA 2.2-ARQUITETURA PUSH-PULL DE UM ANDAR DE POTÊNCIA EM CLASSE A[1] ... 7
FIGURA 2.3-ANDAR DE POTÊNCIA COM ARQUITETURA PUSH-PULL EM CLASSE B ... 8
FIGURA 2.4–FORMAS DE ONDA DO FENÓMENO DE CROSSOVER INERENTE AO FUNCIONAMENTO DE UM AMPLIFICADOR EM CLASSE B ... 8
FIGURA 2.5–ESQUEMA DE UM ANDAR DE POTÊNCIA EM CLASSE G[1] ... 10
FIGURA 2.6–FORMAS DE ONDA INERENTES AO FUNCIONAMENTO DE UM AMPLIFICADOR DE CLASSE G ... 11
FIGURA 2.7–FORMAS DE ONDA DA TENSÃO NOS COLETORES DE TR3 E TR4 DE UM AMPLIFICADOR DE CLASSE G[1] ... 12
FIGURA 2.8-DIAGRAMA DE ILUSTRAÇÃO BÁSICA DA ARQUITETURA DE UM AMPLIFICADOR DE CLASSE D ... 13
FIGURA 2.9-FILTRO BUTTERWORTH PASSA-BAIXO DE SEGUNDA ORDEM [2] ... 14
FIGURA 2.10–CIRCUITO DO FILTRO BUTTERWORTH PASSA-BAIXO DE SEGUNDA ORDEM COM CARGA R[2] ... 15
FIGURA 2.11–IMPACTO DO FATOR DE QUALIDADE NA RESPOSTA EM FREQUÊNCIA DE UM FILTRO BUTTERWORTH PASSA -BAIXO DE SEGUNDA ORDEM [2] ... 16
FIGURA 2.12–ANDAR DE POTÊNCIA COM ARQUITETURA EM PONTE COMPLETA (H)[1] ... 16
FIGURA 2.13–FORMAS DE ONDA DO FENÓMENO DE SHOOT-THROUGH ... 18
FIGURA 2.14–FORMAS DE ONDA ASSOCIADAS AO CONTROLO DE DEAD-TIME [5] ... 18
FIGURA 2.15-FORMAS DE ONDA DA RECUPERAÇÃO DO DÍODO DE CORPO DE UM MOSFET[5] ... 20
FIGURA 2.16-RESISTÊNCIA INTERNA DA GATE DE UM MOSFET[6] ... 20
FIGURA 2.17–DIAGRAMA DE BLOCOS DE UM MODULADOR PWM[1] ... 21
FIGURA 2.18–FORMAS DE ONDA DA MODULAÇÃO PWM[1] ... 22
FIGURA 2.19-ESPETRO DE FREQUÊNCIAS DA MODULAÇÃO PWM ... 23
FIGURA 2.20–FORMAS DE ONDA DA MODULAÇÃO POR DENSIDADE DE PULSO ... 23
FIGURA 2.21–DIAGRAMA DE BLOCOS DA MODULAÇÃO ∆ ... 24
FIGURA 2.22–FORMAS DE ONDA DA MODULAÇÃO ∆[8] ... 25
FIGURA 2.23–DIAGRAMA DE BLOCOS DA MODULAÇÃO ΔΣ ... 25
FIGURA 2.24–FORMAS DE ONDA DA MODULAÇÃO ∆Σ COM SINAL DE ENTRADA DC DE VALOR NÃO NULO POSITIVO [] ... 26
FIGURA 2.25–MODELO LINEAR NO DOMÍNIO DISCRETO DE UM MODULADOR ∆Σ[10]... 27
FIGURA 2.26–STF E FENÓMENO DE NOISE SHAPING PARA UMA MODULAÇÃO ∆Σ DE ORDEM 1 E 2 ... 27
FIGURA 2.27-ESPECTRO DA SAÍDA DE UM MODULADOR ∆Σ DE ORDEM 1[10] ... 28
FIGURA 2.28-MODULADOR ΔΣ DE ORDEM 2 NO DOMÍNIO DISCRETO [10] ... 28
FIGURA 2.29–TRAÇADO DO SNR VERSUS OSR PARA DIFERENTES ORDENS DE MODULAÇÃO [11] ... 29
FIGURA 2.30–DIAGRAMA DE UM MODULADOR ΔΣ DE ORDEM N NO DOMÍNIO DISCRETO [10] ... 30
FIGURA 3.1-ESQUEMA SPICE DO FILTRO BUTTERWORTH PASSA-BAIXO DE ORDEM 2 ... 32
FIGURA 3.2-RESPOSTA EM FREQUÊNCIA DA SIMULAÇÃO DO FILTRO BUTTERWORTH PASSA-BAIXO DE SEGUNDA ORDEM, COM 0 = 25 ... 33
FIGURA 3.3–ESQUEMA SPICE DO FILTRO BUTTERWORTH PASSA-BAIXO DE ORDEM 2 COM NÃO IDEALIDADES LINEARES DOS COMPONENTES REAIS ESCOLHIDOS ... 34
xii
FIGURA 3.4-RESPOSTA EM FREQUÊNCIA DA SIMULAÇÃO DO FILTRO BUTTERWORTH DE SAÍDA, COM NÃO IDEALIDADES
LINEARES E FREQUÊNCIA DE CORTE IGUAL A 27 KHZ ... 34
FIGURA 3.5-TEMPOS DE TRANSIÇÃO ENTRE ESTADOS DE UM MOSFET ... 36
FIGURA 3.6-FORMAS DE ONDA DA TENSÃO E CORRENTE DURANTE AS COMUTAÇÕES DE UM MOSFET[6] ... 37
FIGURA 3.7-FORMAS DE ONDA DA TENSÃO E CORRENTE NO MOSFET AQUANDO DA ENTRADA EM CONDUÇÃO... 38
FIGURA 3.8-BRAÇO DE UMA PONTE H COM DOIS MOSFETS DO TIPO N ... 39
FIGURA 3.9-DIAGRAMA DE BLOCOS DO DRIVER DOS MOSFETS (UCC27210) ... 41
FIGURA 3.10-FORMAS DE ONDA DE VERSUS ( ) DO MOSFETIRFI4024H-117P ... 42
FIGURA 3.11-DEAD-TIME INTRODUZIDO PELO DRIVER UCC27210 EM FUNÇÃO DA TEMPERATURA ... 42
FIGURA 3.12-ESQUEMA DA ARQUITETURA DE CONTROLO DE DEAD-TIME ... 44
FIGURA 3.13-ATRASO TEMPORAL NA ASCENSÃO DO SINAL DE DRIVE DOS MOSFETS ... 44
FIGURA 3.14-FORMAS DE ONDA DO CONTROLO DE DEAD-TIME.LOSANGOS- SAÍDA DO MODULADOR, TRIÂNGULOS- SAÍDA DO PASSA-BAIXO, QUADRADOS- SAÍDA DO CONTROLO DE DEAD-TIME ... 45
FIGURA 3.15-FORMAS DE ONDA DA SIMULAÇÃO DO CONTROLO DE DEAD-TIME DESENHADO... 46
FIGURA 3.16-ESQUEMA DO MODULADOR ∆Σ DE ORDEM 1, COM COMPONENTES DISCRETOS ... 47
FIGURA 3.17–TRANSIÇÃO DO MODELO LINEAR DISCRETO PARA O DOMÍNIO CONTÍNUO DO MODULADOR ∆Σ DE ORDEM 1 49 FIGURA 3.18-SINAL DE ENTRADA E DE SAÍDA DO AMPLIFICADOR COM MODULAÇÃO DE ORDEM 1, FREQUÊNCIA DE AMOSTRAGEM DE 2,5MHZ E FREQUÊNCIA DO SINAL DE ENTRADA A 1 KHZ ... 50
FIGURA 3.19-FFT DA SAÍDA DO AMPLIFICADOR COM MODULAÇÃO DE ORDEM 1, FREQUÊNCIA DE AMOSTRAGEM IGUAL A 2,5 MHZ E FREQUÊNCIA DO SINAL A 1 KHZ ... 50
FIGURA 3.20-FFT DA SAÍDA DO MODULADOR DE ORDEM 1 COM POLO A 500 KHZ, PARA UMA ENTRADA DE 1V A 1 KHZ E FREQUÊNCIA DE AMOSTRAGEM IGUAL A 2,5MHZ ... 51
FIGURA 3.21-SAÍDA DO AMPLIFICADOR COM MODULAÇÃO DE ORDEM 1 A 2,5MHZ E SINAL DE ENTRADA A 20 KHZ ... 52
FIGURA 3.22-ESQUEMA DO MODULADOR ΔΣ DE ORDEM 2, COM COMPONENTES DISCRETOS ... 53
FIGURA 3.23-TRANSIÇÃO DO MODELO LINEAR DISCRETO DO MODULADOR DE ORDEM 2 PARA O DOMÍNIO CONTÍNUO ... 54
FIGURA 3.24-DO TOPO PARA BAIXO, FORMAS DE ONDA DA TENSÃO DE ENTRADA, RESULTADO DA SUBTRAÇÃO COM O FEEDBACK, SAÍDA DO PRIMEIRO INTEGRADOR E SAÍDA DO SEGUNDO INTEGRADOR ... 56
FIGURA 3.25-FORMAS DE ONDA DA TENSÃO DO SINAL DE ENTRADA E DA SAÍDA DO ANDAR DE MODULAÇÃO ∆Σ DE ORDEM 2 ... 56
FIGURA 3.26-FORMAS DE ONDA DA TENSÃO DO SINAL DE ENTRADA E DO PONTO INTERMÉDIO DE CADA BRAÇO DA PONTE H, À FREQUÊNCIA MÁXIMA ... 57
FIGURA 3.27-FORMAS DE ONDA DA ENTRADA DE 1V A 1 KHZ E DA SAÍDA DO AMPLIFICADOR COM MODULAÇÃO DE ORDEM 2 A 2,5MHZ ... 57
FIGURA 3.28-FFT DO SINAL DE SAÍDA DO AMPLIFICADOR COM MODULAÇÃO DE ORDEM 2 A 2,5MHZ E SINAL DE ENTRADA COM AMPLITUDE DE 1V A 1 KHZ ... 58
FIGURA 3.29-FFT À SAÍDA DO MODULADOR DE ORDEM 2 COM UMA FREQUÊNCIA DE AMOSTRAGEM IGUAL A 2,5MHZ E SINAL DE ENTRADA COM 1V DE AMPLITUDE A 1 KHZ ... 59
FIGURA 3.30-SINAL DE SAÍDA DO AMPLIFICADOR COM MODULAÇÃO DE ORDEM 2 A 2,5MHZ E FREQUÊNCIA DO SINAL DE ENTRADA A 20 KHZ ... 59
FIGURA 4.1–DO TOPO PARA BAIXO, FORMAS DE ONDA DO SINAL DE ENTRADA A 1 KHZ, SUBTRAÇÃO COM O FEEDBACK, SAÍDA DO PRIMEIRO INTEGRADOR E SAÍDA DO SEGUNDO INTEGRADOR ... 61
FIGURA 4.2–DO TOPO PARA BAIXO, FORMAS DE ONDA DO SINAL DE ENTRADA A 1 KHZ, SUBTRAÇÃO COM O FEEDBACK, SAÍDA DO PRIMEIRO INTEGRADOR E SAÍDA DO SEGUNDO INTEGRADOR, COM ZOOM NA PASSAGEM POR 0V DA ENTRADA ... 62
FIGURA 4.3-FORMAS DE ONDA DA SAÍDA DO SEGUNDO INTEGRADOR (LARANJA) E DO COMPARADOR (AZUL) ... 62
FIGURA 4.4–DO TOPO PARA BAIXO, FORMAS DE ONDA DO SINAL DE ENTRADA A 1 KHZ, SUBTRAÇÃO COM O FEEDBACK, SAÍDA DO PRIMEIRO INTEGRADOR E SAÍDA DO SEGUNDO INTEGRADOR, COM ZOOM NA PASSAGEM POR 1V DA ENTRADA ... 63
xiii
FIGURA 4.5-FORMAS DE ONDA DA ARCADA POSITIVA DO SINAL DE ENTRADA (LARANJA) E DA SAÍDA DO MODULADOR ∆Σ DE
ORDEM 2(AZUL) ... 63
FIGURA 4.6-FFT DA SAÍDA DO ANDAR DE MODULAÇÃO ΔΣ DE ORDEM 2 ... 64
FIGURA 4.7-FORMAS DE ONDA DA ENTRADA (LARANJA) E SAÍDA (AZUL) DO CONTROLO DE DEAD-TIME IMPLEMENTADO .... 64
FIGURA 4.8–FORMAS DE ONDA DA TENSÃO À ENTRADA DOS DRIVERS (LARANJA) E NO PONTO INTERMÉDIO DE CADA UM DOS BRAÇOS DA PONTE H(VIOLETA E VERDE) ... 65
FIGURA 4.9-FORMAS DE ONDA DA ENTRADA (LARANJA) E SAÍDA (VERMELHO) DO AMPLIFICADOR A 1 KHZ, COM 1W DE POTÊNCIA NA CARGA ... 65
FIGURA 4.10-FFT DA SAÍDA DO AMPLIFICADOR A 1W DE POTÊNCIA NA CARGA ... 66
FIGURA 4.11-FORMAS DE ONDA DA ENTRADA (LARANJA) E SAÍDA (VERMELHO) DO AMPLIFICADOR A 1 KHZ, COM 10W DE POTÊNCIA NA CARGA ... 66
FIGURA 4.12-FFT DA SAÍDA DO AMPLIFICADOR A 10W DE POTÊNCIA NA CARGA ... 67
FIGURA 4.13-FORMAS DE ONDA DA ENTRADA (LARANJA) E SAÍDA (VERMELHO) DO AMPLIFICADOR A 1 KHZ, COM APROXIMADAMENTE 50W DE POTÊNCIA NA CARGA ... 67
FIGURA 4.14-FFT DA SAÍDA DO AMPLIFICADOR A 50W DE POTÊNCIA NA CARGA ... 68
FIGURA 4.15-FORMAS DE ONDA DA ENTRADA (LARANJA) E SAÍDA (VERMELHO) DO AMPLIFICADOR A 256HZ ... 69
FIGURA 4.16-FORMAS DE ONDA DA ENTRADA (LARANJA) E SAÍDA (VERMELHO) DO AMPLIFICADOR A 10,24 KHZ ... 69
FIGURA 4.17-FORMAS DE ONDA DA ENTRADA (LARANJA) E SAÍDA (VERMELHO) DO AMPLIFICADOR A 20 KHZ ... 70
FIGURA 4.18-DESENHO DA PLACA DE CIRCUITO IMPRESSO PARA O AMPLIFICADOR EM CLASSE D ... 71
FIGURA 4.19–ASPETO FINAL DA IMPLEMENTAÇÃO PRÁTICA DO AMPLIFICADOR DE CLASSE D DESENHADO ... 71
FIGURA 4.20-BANCADA DE TRABALHO DO PROJETO ... 72
FIGURA 7.1-ESQUEMA DO ANDAR DE MODULAÇÃO ΔΣ DE ORDEM 2, DO AMPLIFICADOR EM CLASSE D IMPLEMENTADO ... 82
FIGURA 7.2-ESQUEMA DO ANDAR DE POTÊNCIA E CONTROLO DO DEAD-TIME DO AMPLIFICADOR DE CLASSE D COM MODULAÇÃO ΔΣ DE ORDEM 2 ... 83
xv
Lista de Tabelas
TABELA 2.1–PRINCIPAIS DIFERENÇAS ENTRE AS DUAS ARQUITETURAS DA PONTE DO ANDAR DE POTÊNCIA... 17
TABELA 3.1-TABELA DE OBJETIVOS DE PREFORMANCE TRAÇADOS ... 31
TABELA 3.2-CARACTERÍSTICAS DO MOSFETIRFI4024H-117P ... 35
TABELA 3.3-CARACTERÍSTICAS DO MOSFETIRFI4019H-117P ... 37
TABELA 3.4-PRINCIPAIS CARACTERÍSTICAS DO DRIVER UCC27210 ... 40
TABELA 3.5-RESULTADOS DA MODULAÇÃO ΔΣ DE ORDEM 1 E 2, SINAL DE ENTRADA COM 1V DE PICO A 1 KHZ E Δ IGUAL A 1,25V ... 60
TABELA 4.1-COMPARAÇÃO ENTRE OS RESULTADOS OBTIDOS EM SIMULAÇÃO E NA PRÁTICA, PARA DIFERENTES NÍVEIS DE POTÊNCIA NA CARGA ... 70
xvii
Abreviaturas e Símbolos
Lista de abreviaturas
AC Alternating Current
ADC Analog To Digital Converter
ADSL Asymmetric digital subscriber line
BJT Bipolar Junction Transistor
DAC Digital To Analog Converter
DC Direct Current
DT Dead Time
EAGLE Easily Applicable Graphical Layout Editor
ENOB Effective Number Of Bits
ESR Equivalent Series Resistance
FB Feedback
FET Field-Effect Transistor
FEUP Faculdade de Engenharia da Universidade do Porto FFT Fast Fourier Transform
Hi-Fi High-Fidelity
IC Integrated Circuit
MATLAB Matrix Laboratory
MOSFET Metal Oxide Semiconductor Field Effect Transistor
NTF Noise Transfer Function
OSR Oversampling Ratio
PA Power Amplifier
PCB Printed Circuit Board
PDM Pulse Density Modulation
PMOS P-channel type Metal Oxide Semiconductor
PWM Pulse Width Modulation
RMS Root Mean Square
SMPS Switched-Mode Power Supply
xviii
SPICE Simulation Program with Integrated Circuit Emphasis
STF Signal Transfer Function
THD Total Harmonic Distortion
Lista de símbolos
ω Frequência angular
Frequência angular de corte de um filtro α Ângulo
Frequência de corte de um filtro Frequência de amostragem Largura de banda de um sinal Período de amostragem Constante de tempo
s Variável independente do Domínio de Laplace z Variável independente do Domínio z
Ganho de corrente de Emissor Comum de um BJT Q Fator de qualidade de um filtro
η Rendimento Energético
∆ Delta
Capítulo 1
Introdução
1.1
Motivação
Desde o início da sua existência que a arquitetura dos amplificadores de áudio se mantém praticamente inalterada no que diz respeito às abordagens adotadas para cada uma das operações inerentes ao seu funcionamento. Dos três andares constituintes, o de saída/potência foi o que mais configurações experimentou, quase sempre tendo como objetivo o minimizar das perdas energéticas e a redução da distorção no sinal a entregar à carga. Em alguns casos, estas alterações relacionam-se com o tipo de classe de funcionamento para que o dispositivo em causa é desenhado.
De uma forma indiscutivelmente predominante, grande parte dos amplificadores de áudio Hi-Fi no mercado de baixa/média potência são ainda hoje e desde há muito tempo amplificadores de classe A, B e A/B, mas cada vez menos. A sua adoção foi feita em grande escala graças ao relativamente bom equilíbrio que promovem entre os níveis de distorção gerados e as perdas energéticas, para a tecnologia que até então se dispunha. Contudo, aproveitando os recentes desenvolvimentos deste fator, surge uma classe de amplificadores cujo conceito teórico existe já há algumas décadas, mas apenas agora tem todas as condições reunidas para se afirmar. Esta é a classe D. A sua arquitetura é radicalmente diferente das restantes, rasgando desta forma com todas as conformidades inerentes a este aspeto na área do áudio. Tendo esta uma famosa e elevada inércia ao reconhecimento e adoção de novas abordagens, a classe D rapidamente foi alvo de algum ceticismo, devido em grande parte à sua natureza semidigital. Contudo, realçando as suas características cientificamente comprovadas no que diz respeito à prestação energética e de distorção inerentes ao seu funcionamento, resta muito pouca margem de dúvida em como esta é a classe de amplificadores do futuro, sobrepondo-se claramente a qualquer outra das referidas.
No entanto, embora tal tecnologia esteja já num nível relativamente avançado e em contínuo desenvolvimento, há ainda muito para investigar, pois o interesse que agora lhe é direcionado, é também muito recente.
2 Introdução
Nesse sentido surge esta dissertação, onde se pretende construir um amplificador de áudio em classe D, com o objetivo de aprofundar e desmitificar o conhecimento inerente ao seu funcionamento, comprovar os motivos que lhe promovem interesse e contribuir com novas perspetivas, abordagens e soluções.
1.2
Definição do problema
O conhecimento inerente aos amplificadores de classe D encontra-se num nível relativamente avançado, mas bastante disperso e ainda não muito disseminado, o que dificulta a compreensão das áreas menos claras do seu funcionamento. Desta forma, foi necessário fazer uma revisão bibliográfica exigente e minuciosa, de modo a não tomar como confiável alguma informação menos correta que se encontra em projetos de acesso livre.
A eficiência energética é uma das principais vantagens em questão, de modo que um rigoroso cuidado foi adotado nesta área, nomeadamente no andar de potência, para assim possibilitar a melhor exploração possível desta característica.
Por sua vez, a transparência no processo de amplificação é em grande parte (mas não de forma exclusiva) responsabilidade do andar de modulação, pelo que é importante avaliar as características inerentes às diferentes técnicas passiveis de aqui serem aplicadas, antes de decidir qual será realmente adotada, tendo sempre como objetivo o melhor relacionamento possível entre as características que diferenciam a classe D das restantes.
1.3
Solução Proposta
Numa fase inicial concluiu-se que 50 W de potência na carga seria um valor praticamente aceitável para objetivo de desenho, pois é interessantemente elevado, mas não demasiado a ponto de requerer um exaustivo cuidado com questões de interferência eletromagnética. Contudo, esta atenção não deve ser totalmente posta de lado, pois a sua temática tem uma ligação muito forte com o funcionamento do andar de saída (que será em ponte H) desta classe.
O valor rms estipulado do sinal de entrada foi adotado a 0,707 V, para assim condizer com o standard de 0 dBu associado às especificações de amplificadores de áudio. Ainda assim, esta pode ser facilmente adaptada para outro qualquer valor, bastando apenas para isso fazer um ajuste de ganhos no andar de modulação.
Ao longo de todas as secções constituintes do amplificador foi tido o máximo cuidado no desenho para assim privilegiar os bons níveis de taxa de distorção harmónica, estando estes também relacionados com rácio sinal-ruído.
1.4 Constituição do documento 3
Depois do protótipo estar a funcionar como se pretende, procurou-se aplicar também um microcontrolador que ficará responsável por fazer a supervisão do sistema e interface com o utilizador, de modo a engrandecer a robustez do aparelho.
1.4
Constituição do documento
Além do atual capítulo, a presente dissertação constitui-se da seguinte forma:
• Capítulo 2 - fornece uma revisão bibliográfica dos aspetos mais importantes e
necessários de conhecer para compreensão das abordagens adotadas ao longo do texto.
• Capítulo 3 – descreve todos os passos dados no processo de desenho do
amplificador, fundamentando-os com os resultados das respetivas simulações.
• Capítulo 4 – apresenta os resultados obtidos na implementação prática do
desenho elaborado.
• Capítulo 5 – é feita uma análise dos resultados obtidos tanto em simulação como
na prática.
• Capítulo 6 – são referidas as conclusões que se retiram deste trabalho,
juntamente com as dificuldades sentidas ao longo do processo e perspetivas de trabalho futuro.
• Capítulo 7 – contém anexos, nomeadamente esquemas do amplificador
Capítulo 2
Revisão da Literatura
Esta secção é dedicada aos principais aspetos inerentes ao funcionamento das classes de amplificadores mais relevantes, assim como os mínimos que o leitor deverá conhecer em relação à classe D, para que lhe seja possível compreender os passos, intenções e decisões descritas ao longo do trabalho.
2.1
A estrutura de Amplificadores de três andares
Uma parte considerável dos amplificadores de áudio no mercado atual são de arquitetura totalmente analógica e caracterizam-se por uma constituição baseada em três andares: o de entrada (subtração e ganho), amplificação de tensão e potência/saída [1].
Na Figura 2.1 é apresentada uma versão básica (para fins demonstrativos) desta topologia.
6 Revisão da Literatura
Aqui, o primeiro andar tem como função adquirir o sinal de entrada e de realimentação, subtraí-los e fornecer o erro resultante ao andar seguinte, responsável pela amplificação em tensão.
Este por sua vez funciona como uma transimpedância, pois recebe um sinal em corrente e entrega-o em tensão ao andar de saída. O valor desta é ditado pelo condensador de Miller, que por sua vez desempenha um igualmente importante papel no que diz respeito à linearização do andar, diminuindo a impedância de saída do mesmo. Desta forma contribui para o minimizar da distorção causada pelo efeito de carga não linear do andar de saída.
Este último é responsável pela forma como a potência é fornecida à carga. Para efetuar essa operação existem várias classes, que se diferenciam essencialmente pela eficiência que proporcionam no processo. É principalmente aqui que se faz a distinção entre elas, uma vez que os dois primeiros andares são comuns a uma grande parte dos amplificadores de áudio.
2.2
Classe A
Os amplificadores de funcionamento em classe A caracterizam-se essencialmente pelos seguintes aspetos: bons níveis de linearidade e muito baixa eficiência energética [1].
Pode parecer à primeira impressão que há aqui um contra-senso, mas este comportamento é relativamente fácil de entender. Os bons níveis de linearidade deste tipo de amplificadores devem-se ao facto de todos os transístores no andar de saída estarem em constante condução, diminuindo assim a introdução de não linearidades provocada pelo fenómeno de comutação. Esta operação verifica-se mesmo até quando a entrada do amplificador é nula.
Desta forma se justifica também a baixa eficiência associada à classe A, que por sua vez se traduz em temperaturas de funcionamento muito elevadas, devido à dissipação elétrica de potência resultante da constante condução dos transístores. Neste tipo de amplificadores, um sinal de entrada nulo, provoca a dissipação de uma quantidade de potência igual ao dobro do valor máximo em funcionamento normal [1]. Assim, ditam as regras do bom senso que mesmo que seja obrigatório recorrer ao uso de um amplificador deste tipo, o mesmo deve ser condicionado a operar a baixos valores de potência.
Contudo, esta classe possui de facto algumas vantagens que lhe são únicas, tais como: Não há distorção de crossover nem switchoff;
O andar de amplificação não sofre o efeito de carga não linear do andar de saída; A incompatibilidade de β dos transístores de saída pode ser ignorada.
De qualquer das formas, nenhuma destas características consegue ser devidamente aproveitada, pois a contrapartida das perdas de energia continua mesmo assim a ter um peso muito superior ao conjunto de todas as vantagens.
2.3 Classe B 7
Figura 2.2 - Arquitetura push-pull de um andar de potência em Classe A [1]
A Figura 2.2 ilustra uma configuração do andar de saída em push-pull. Como tem vindo a ser descrito, no modo de funcionamento em classe A, ambos os transístores TR2 e TR3 conduzem em simultâneo e de forma contínua. Para este tipo de operação, a arquitetura
push-pull é a que permite alcançar melhores valores de eficiência energética, podendo
teoricamente atingir os 50% quando a potência na carga é máxima. Contudo, devido aos elevados picos em relação ao valor médio dos sinais sonoros, o verdadeiro valor desta eficiência provavelmente não excede os 10% [1]. Esta configuração possui ainda a vantagem de que quando confrontada com uma carga de impedância muito baixa, o seu modo de funcionamento translada para classe A/B, onde a dissipação é atenuada, mas em contrapartida os níveis de distorção induzida serão maiores do que em classe A ou classe B devidamente afinados.
Por último, é importante denotar que a operação do andar de potência em classe A depende do valor de , que normalmente se situará cerca de 700 mV acima do qual, o funcionamento é feito em classe B [1]. Tal afinação é por sua vez dependente dos valores das resistências RE.
2.3
Classe B
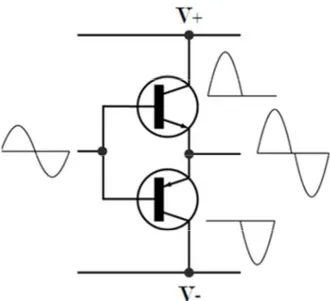
Esta classe de amplificadores caracteriza-se por um funcionamento onde os transístores do andar de saída conduzem de forma alternada em push-pull. A próxima figura é uma ilustração do descrito.
8 Revisão da Literatura
Figura 2.3 - Andar de potência com arquitetura push-pull em Classe B
Aqui, a condução da arcada positiva do sinal é feita pelo transístor superior de junção NPN, enquanto que a arcada negativa fica da responsabilidade do transístor complementar de junção PNP (em baixo). Ambos são ligados aos respetivos rails de alimentação via coletor e é-lhes entregue na base o sinal a reproduzir na saída, que por sua vez faz de driver a cada um dos dispositivos.
Ao contrário do que acontece na classe A, aqui os transístores apenas conduzem quando há um sinal de entrada não nulo e nunca o fazem de forma simultânea, contribuindo assim para uma melhoria da eficiência. Por sua vez, a capacidade em tensão é limitada, mas flexível em relação ao valor da impedância da carga, pois esta classe é detentora de uma boa capacidade em corrente [1].
Apesar da evolução positiva nos resultados, a condução alternada dos transístores contribuiu para o aparecimento de um tipo de distorção que não existe nos amplificadores de classe A. Esta é conhecida por distorção de crossover e resulta da condição onde o sinal de entrada já não é nulo, mas ainda não tem amplitude suficiente para ligar nenhum dos transístores, resultando no comportamento ilustrado na Figura 2.4.
Figura 2.4 – Formas de onda do fenómeno de crossover inerente ao funcionamento de um amplificador
2.4 Classe AB 9
Na classe B, as fontes de distorção com maior peso são originadas pelos fenómenos de
crossover e switchoff [1]. A penúltima pode ser atenuada através do desenho e aplicação de
uma malha de realimentação negativa, mas o seu total desaparecimento é praticamente impossível. Por sua vez, a distorção introduzida por switchoff depende logicamente das características de velocidade de comutação dos transístores e da topologia adotada. Nesta última, o principal fator em questão é a capacidade (ou não) de polarizar inversamente as junções base-emissor dos transístores, minimizando assim o tempo durante o qual os portadores de carga são extraídos do dispositivo, para que este entre em corte o mais rapidamente possível.
Ainda que padeça destes dois sintomas, os amplificadores de classe B são capazes de produzir realmente bons resultados no que diz respeito a uma amplificação transparente do sinal, quando o devido cuidado é tido no seu desenho e em todos os andares da sua arquitetura. A somar a isto há ainda o seu nível de eficiência energética, que teoricamente ronda os 70%, valor este que na prática é geralmente atenuado, mas nunca para valores inferiores ao máximo produzido por um classe A.
2.4
Classe AB
Esta não é propriamente uma nova classe, mas sim uma combinação do modo de funcionamento em classe A e B.
Como foi referido na secção 2.2, o andar de potência pode entrar neste modo de funcionamento se estiver a operar em classe B e experimentar um aumento da sua tensão de afinação. Tipicamente, se este for de 700 mV, o amplificador entra em classe A [1]. O fenómeno inverso também acontece quando em classe A, a carga requer grandes valores de corrente (fator onde a capacidade desta é limitada).
De forma simplista, pode-se dizer que quando se lida com baixos valores de potência, o funcionamento é feito em classe A, promovendo assim a linearidade e melhorando significativamente o desempenho a nível da distorção gerada. Por sua vez, acima de um determinado valor de potência, a classe A deixa de ser viável e o amplificador comuta para um funcionamento em classe B, melhorando a eficiência de alimentação da carga, mas piorando o desempenho da distorção devido aos fenómenos de crossover e switchoff.
A classe A/B é menos linear do que a classe A e a classe B, sendo muitas vezes interpretada como um modo de melhoramento da capacidade em corrente de um classe A.
10 Revisão da Literatura
2.5
Classe G
Os amplificadores em classe G tardaram alguns anos até que a sua aplicação encontrasse uma área específica para exploração das suas características. Tal ocorreu quando os requisitos de funcionamento dos PAs de alta potência começaram a tornar-se mais exigentes, nomeadamente no que diz respeito aos níveis de dissipação energética. Contudo, a sua aplicabilidade tem-se estendido também a sistemas de cinema em casa, subwoofers de potência e drives de linhas de telefone ADSL.
Figura 2.5 – Esquema de um andar de potência em Classe G [1]
O facto de durante grande parte do tempo a potência de saída associada a um sinal sonoro permanecer muito abaixo do seu valor de pico favorece a eficiência da classe G, pois neste tipo de abordagem, os rails de alimentação vão alternando à medida que o nível do sinal amplificado assim o exige. Se o mesmo permanecer grande parte do seu tempo a níveis baixos, então durante estes mesmos intervalos, um amplificador de também baixa potência seria suficiente para cumprir com os requisitos de forma eficiente.
O princípio de funcionamento dos amplificadores de classe G explora este conceito através da introdução de dois ou mais pares de rails de alimentação, permitindo alternar entre estes, tendo como critério a potência exigida. Quando o sinal a reproduzir é constituído por elevados picos de tensão, o mesmo é tratado por um mecanismo capaz de extrair grandes
2.5 Classe G 11
valores de potência dos rails de alimentação, o que por sua vez provoca um incremento das perdas dissipativas, mas durante curtos intervalos de tempo, devido à natureza do sinal. Estes picos são reproduzidos com auxílio dos rails de maior tensão, enquanto que a restante maioria do sinal, devido à sua natureza de menor intensidade, é alimentada pelos rails de menor tensão.
Figura 2.6 – Formas de onda inerentes ao funcionamento de um amplificador de classe G
O leitor com algum conhecimento em eletrotecnia facilmente se aperceberá de que este tipo de alternância entre fontes de alimentação é um aspeto que deve ser tratado com o maior dos cuidados para que seja feito da forma mais “limpa” possível, principalmente a elevadas frequências.
Estes amplificadores têm duas formas de implementação: em série ou paralelo [1]. A configuração em paralelo é mais usada para sistemas PA de grande potência, enquanto que o sistema em série tem a sua aplicação mais focada em amplificadores Hi-Fi. Este último é ilustrado pelo esquema da Figura 2.5, com uma arquitetura seguidor de emissor e dois pares de rails de alimentação. Os transístores denominados de “Dispositivos exteriores de potência” são os responsáveis pela comutação entre as fontes de alimentação, quando o sinal assim o exige. Os mesmos conduzem durante menos de 50% de um ciclo, estando então num funcionamento em classe C, o que faz com que esta topologia seja por vezes também denominada de classe B+C, devido ao facto de os “Dispositivos interiores de potência” operarem em classe B (embora também o possam fazer em classe A ou A/B) [1].
Os díodos D3 e D4 têm o papel de fazer a ligação aos rails de menor potência e por este motivo são conhecidos por “Díodos Comutantes” [1]. Quando um sinal excede a tensão do rail de menor valor (+V1), D1 conduz, TR5 e TR6 ligam e D3 desliga, fazendo assim com que a totalidade da corrente de saída seja fornecida pelo rail de maior tensão (+V2). A dissipação é
12 Revisão da Literatura
assim partilhada por TR3 e TR6. Quando os sinais são negativos, as operações desencadeiam-se forma simétrica.
Figura 2.7 – Formas de onda da tensão nos coletores de TR3 e TR4 de um amplificador de classe G [1]
A Figura 2.7 mostra a forma como a tensão nos coletores de TR3 e TR4 se afasta dos rails de menor tensão, à medida que o sinal assim o exige.
A linearidade deste tipo de amplificadores é idêntica à da classe B, pois é aqui que o funcionamento se mantém durante grande parte do seu tempo, tendo em conta que, analogamente ao que acontece na classe A/B, a classe G tem também uma região de baixa potência com linearidade de classe A, apenas abandonando este funcionamento na presença dos mesmos motivos anteriormente apresentados para a classe A/B.
2.6
Classe D
Os amplificadores de classe D são por excelência os que produzem melhores resultados no que diz respeito a eficiência energética, traduzindo tal facto com rendimentos que podem atingir os 95% reais [1].
A sua história remota ao ano de 1958, onde foi pela primeira vez abordado. Contudo, a combinação de dispositivos comutados a alta frequência com transformadores de válvulas de saída, desmotivou a continuidade da sua investigação.
Foi no Reino Unido que surgiu o primeiro exemplar, denominado de Sinclair X-10, que proporcionava uma saída de 10 W. Mais tarde foi sucedido pelo X-20, cuja potência ascendia aos 20 W.
Uma limitação de peso que contribuiu para o desinteresse neste tipo de amplificadores foi o estado imaturo da tecnologia associada aos transístores, que não possibilitou uma
2.6 Classe D 13
capacidade de potência e velocidade de comutação suficientes para que as características do amplificador de classe D pudessem ser devidamente aproveitadas.
Só com o relativamente recente desenvolvimento destas condicionantes, nomeadamente nos MOSFETs, é que a investigação desta classe começou a dar os primeiros frutos, que rapidamente despertaram as atenções dos audiófilos e entusiastas desta área. De notar que não se trata de uma gralha aquando da referência a MOSFETs, em vez de transístores bipolares. Os últimos apresentam efetivamente uma melhor solução para amplificadores de áudio totalmente analógicos, mas será de seguida demonstrado que a melhor capacidade dos MOSFETs em funcionar como interruptores on/off é adequada ao funcionamento em classe D.
Esta é uma tecnologia com ainda muito potencial por explorar e em constante desenvolvimento na atualidade, pois o ceticismo de que era alvo só agora começa a desvanecer, em simultâneo com o crescimento da sua popularidade, mediante os incontornáveis bons resultados que vão sendo comprovados um pouco por engenheiros e investigadores de todo o mundo.
Figura 2.8 - Diagrama de ilustração básica da arquitetura de um amplificador de Classe D
Da Figura 2.8 denota-se desde logo que a arquitetura desta classe de amplificadores é radicalmente diferente de todos os discutidos até então, o que se reflete naturalmente no seu funcionamento. Aqui não existem dispositivos lineares, algo que nas anteriores classes é uma prioridade fulcral. Os transístores são agora MOSFETs que comutam a frequências ultrassónicas (500 kHz a 5 MHz) e que se pretendem a funcionar entre a zona de saturação e a zona de corte, ao contrário do que acontece nos BJTs das restantes classes. Com este tipo de funcionamento, a tensão entre transístores tem agora a forma de degraus com amplitude igual à da fonte de alimentação, o que força a introdução de um filtro LC de modo a ser possível extrair o valor médio gerado por estes, que aquando de uma modulação bem conseguida, iguala o valor do sinal de entrada (amplificado) e assim este é reconstituído [2]. Tal filtro é também importante na atenuação da radiação eletromagnética que o pulsar da fonte emitiria no caso deste não estar presente. A sua dimensão e requisitos estão fortemente relacionados com a frequência de amostragem, sendo que diminuem com o aumento desta, o que por sua vez degrada a eficiência, devido ao aumento das perdas geradas na rápida comutação dos MOSFETs [1].
14 Revisão da Literatura
2.6.1
Filtro passa-baixo de saída
O desenho do filtro de saída desta classe de amplificadores é de extrema importância, pois é este o responsável pela reconstrução do sinal a entregar à carga, a partir dos pulsos resultantes da modulação.
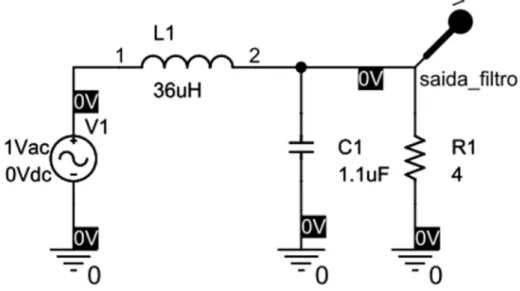
A abordagem mais usualmente aplicada nestes casos é o filtro passa baixo LC Butterworth de segunda ordem [2], como o ilustrado na próxima figura.
Figura 2.9 - Filtro Butterworth passa-baixo de segunda ordem [2]
Os motivos inerentes ao seu favoritismo prendem-se com o facto de não possuir elementos dissipativos na sua constituição, proporcionar uma banda de passagem plana e uma atenuação crescente com a frequência, a 40 dB/dec, para todos os valores acima da frequência de corte, que se dita da seguinte forma
f =
1
2π√LC
.
(2.1)Por sua vez, a resposta em frequência é
H s
1
LC
s
&' s
RC '
LC
1
(2.2)2.6 Classe D 15
Figura 2.10 – Circuito do filtro Butterworth passa-baixo de segunda ordem com carga R [2]
O dimensionamento para aplicação num andar de potência em meia ponte é feito de forma direta através do recurso às equações descritas até aqui. Já no caso de uma saída com arquitetura em ponte completa, são aplicados dois filtros Butterworth, iguais ao da Figura
2.10, a cada terminal do speaker. Aqui o dimensionamento é feito da mesma forma, mas com
a atenção de reduzir o valor de R para metade, uma vez que a carga está posicionada no eixo de simetria da ponte em H, podendo assim ser admitido que cada filtro está associado a metade desta [3]. Tendo isto em conta, o desenho é imediato através das expressões [2]
C
1
ω R√2
(2.3)e
L
R√2
ω .
(2.4)Neste processo, para além da frequência de corte pretendida, deve também ser tido em conta o fator de qualidade do filtro (Q), que se pretende idealmente que esteja o mais próximo possível de 0,707, para assim obter uma resposta criticamente amortecida e não sub ou sobre amortecida, o que provocaria uma excessiva passagem ou atenuação de componentes de sinal com frequência não pretendida [2].
Estas quatro variáveis de desenho relacionam-se através de
16 Revisão da Literatura
Figura 2.11 – Impacto do fator de qualidade na resposta em frequência de um filtro Butterworth
passa-baixo de segunda ordem [2]
Uma vez que a largura de banda do sinal audível ao ser humano compreende valores de 20 Hz a 20 kHz, a frequência de corte não deve ser inferior a estes, para que os mesmos não sofram qualquer tipo de ganho que não o unitário e assim o sinal seja devidamente amplificado. Este tipo de resposta é também responsável pela atenuação de todas as componentes de sinal fora da banda de interesse.
2.6.2
Andar de Potência
O andar de potência de um amplificador em Classe D conforma essencialmente duas arquiteturas distintas.
Na Figura 2.8 está representada uma delas, o andar em meia ponte, que se caracteriza por possuir apenas um braço de dois transístores, contra os dois braços da arquitetura em ponte completa representada na Figura 2.12.
2.6 Classe D 17
Esta proporciona uma variação de tensão na carga igual ao dobro da fornecida por um andar em meia ponte, para além da grande vantagem de com apenas uma fonte de alimentação positiva conseguir reproduzir diferenças de potencial negativas na carga, o que na opção alternativa só é possível com auxílio de uma segunda fonte.
A seguinte tabela retrata os principais fatores que diferenciam estas duas arquiteturas [4].
Tabela 2.1 – Principais diferenças entre as duas arquiteturas da ponte do andar de potência
Meia Ponte Ponte Completa
Fontes de alimentação 2 1
Capacidade de corrente Dobro da de meia ponte
Número de MOSFETs 2 4
Linearidade Redução dos harmónicos de ordem par
Offset DC Necessita de ajuste É cancelado naturalmente Número de níveis de
tensão de saída
2 3
A abordagem em meia ponte é relativamente mais simples de implementar, mas é também mais pobre em resultados. Por sua vez, a arquitetura em ponte completa tem uma capacidade intrínseca de eliminar os harmónicos de ordem par e cancelar o offset DC, o que contribui para a sua robustez de funcionamento. A somar a isto, existe ainda a capacidade de produzir três níveis diferentes de tensão, promovendo assim uma melhor quantificação do sinal modulado [5].
Teoricamente, ambas as arquiteturas do andar de potência desta classe tem uma eficiência energética de 100%, uma vez que os MOSFETs funcionam em estados de total condução e corte. Contudo, na prática o valor não nulo da resistência de condução e do tempo de comutação destes dispositivos, produz perdas que quando tratadas com o devido cuidado durante o processo de desenho reduzem a eficiência geral numa proporção tipicamente crescente a partir de 5% [5].
Neste andar, há ainda um fenómeno de extrema importância na performance do amplificador que ocorre quando no mesmo braço, enquanto um MOSFET entra em condução, o componente adjacente ainda não está em corte completo. Tal comportamento deve-se principalmente ao tempo que estes dispositivos levam a descarregar todos os portadores de carga, até estarem totalmente abertos. O intervalo de tempo é referenciado à descida do sinal do driver na gate do MOSFET.
18 Revisão da Literatura
O resultado é um curto-circuito entre a fonte e a massa que gera elevados picos de corrente e contribui para uma redução do tempo de vida de todos os componentes envolvidos. Este fenómeno é usualmente conhecido por Shoot-through [5] e tem uma influência de peso na introdução de distorção harmónica.
Figura 2.13 – Formas de onda do fenómeno de Shoot-Through
Assim é mandatório a aplicação de um sistema que introduza um tempo devidamente calculado entre o corte e a entrada em condução de MOSFETs no mesmo braço da ponte. Este tempo depende das capacidades parasitas dos respetivos componentes, pois tais atrasam a evacuação dos portadores de carga. Um outro fator que contribui para o valor deste intervalo é a amplitude da corrente que percorre os dispositivos, pois quanto maior esta for, mais são os portadores necessários de evacuar até que a entrada em corte esteja completa, muito por culpa do díodo de roda livre associado a cada transístor.
Ao sistema responsável por fazer este controlo, dá-se vulgarmente o nome de controlo de
Dead-Time [5].
Figura 2.14 – Formas de onda associadas ao controlo de Dead-Time [5]
Este tempo de não condução mútua deve ser rigorosamente controlado e não superior ao estritamente necessário, pois um Dead-Time elevado rapidamente provoca o aumento da distorção harmónica no sinal de saída em níveis superiores à unidade percentual [5].
2.6 Classe D 19
2.6.3
MOSFET
O correto dimensionamento dos MOSFETs a utilizar é de extrema importância para que seja possível alcançar bons resultados. Neste processo, os principais fatores a ter em conta são [6]:
• Tensão de breakdown entre o pino drain e source (, - );
• Resistência estática de condução ( - ./);
• Carga elétrica da gate (01);
• Carga de recuperação do díodo de corpo (022);
• Resistência interna da gate ( 3 4/5).
O valor de , - deverá no mínimo (de modo a manter uma margem de segurança) ser igual ao dobro da tensão que o MOSFET terá de suportar quando em corte, uma vez que em condução esta é muito pequena, pois idealmente, neste estado o transístor comporta-se como um curto-circuito. Diretamente relacionado com a eficiência deste comportamento está
- ./, cujo valor deverá ser o mais pequeno possível, para assim não permitir que as perdas
em condução atinjam níveis não desprezáveis (67./89çã. - ./ × =2>& ), o que naturalmente prejudicaria o rendimento do amplificador.
A carga elétrica 01 tem um impacto direto na velocidade de comutação do MOSFET, pois só depois desta estar carregada é que o dispositivo se encontra em plena condução. Assim entende-se que este parâmetro deve ser tão pequeno quanto possível, o que contribui também para a redução das perdas de comutação, uma vez que estas se representam da seguinte forma [6]
P
@A@BC_EAFG@BçãAP
EAFG@BçãA' P
HB@I,
(2.6) onde 67.>95Kçã. será mostrado de seguida que está relacionado com a tensão - , a corrente no MOSFET e os tempos de comutação, enquanto que [6]P
HB@I2 × Q
H× V
HM× f
M,
(2.7)sendo 1 a tensão na gate e a frequência de comutação/amostragem.
O parâmetro 022 representa a carga que o díodo de corpo tem de evacuar para entrar em corte. Este valor é ditado essencialmente pela corrente que o percorre e a sua derivada, mas é influenciado também pela temperatura a que o componente se encontra, aumentando com esta. 022 tem também impacto na eficiência do amplificador, pois ao fazer com que a entrada em corte seja menos instantânea, fará com que a corrente de entrada em condução do MOSFET complementar seja maior, contribuindo assim para um incremento das perdas, principalmente se o controlo de dead-time não for apurado. Ao tempo associado a este fenómeno de descarga, dá-se o nome de Tempo de Recuperação Reversa do díodo de corpo (N22). O mesmo tem uma relação direta com 022 e deve ser tão pequeno quanto possível para o MOSFET a aplicar.
20 Revisão da Literatura
Figura 2.15 - Formas de onda da recuperação do díodo de corpo de um MOSFET [5]
A resistência 3 4/5 afeta os tempos de comutação e assim a eficiência energética do processo, pois encontra-se em série com a gate do MOSFET e desta forma diminui a corrente que lhe é entregue, o que por sua vez tarda o processo de carga de 01. Para além disso, este parâmetro é também dependente da temperatura, crescendo com ela, o que pode afetar o processo de controlo do dead-time e contribuir assim de outra forma para a degradação da eficiência.
Figura 2.16 - Resistência interna da gate de um MOSFET [6]
Todos os parâmetros aqui listados devem ser tidos em conta na escolha do modelo do MOSFET a aplicar no andar de potência, devido ao grande peso que estes têm nos fenómenos descritos. Assim o componente escolhido deverá ser o que proporcionar a melhor relação possível entre todas estas características.
2.6 Classe D 21
2.6.4
Andar de modulação
Este é o coração do amplificador de classe D, pois aqui é feita a modulação do sinal de entrada, processo no qual a eficácia dita grande parte da capacidade que o amplificador tem de ser o mais transparente possível na amplificação.
Esta tarefa tem várias abordagens diferentes, mas todas elas consistem na representação do sinal por uma onda quadrada de duração variável, cujo valor médio iguala a amplitude do sinal a modular. De seguida serão apresentadas as duas opções mais vastamente aplicadas.
2.6.4.1
Modulação da Largura de Impulso
A técnica de Modulação da Largura de Impulso (Pulse Width Modulation - PWM) é universalmente conhecida e vastamente aplicada em uma grande parte dos casos onde surge a necessidade de modular um sinal.
Figura 2.17 – Diagrama de blocos de um modulador PWM [1]
O seu funcionamento é baseado na comparação entre o sinal de entrada (“modulador”) e um outro de alta frequência e período constante, denominado de “portador”. Este pode ser uma onda em dente de serra ou triangular, desde que as derivadas associadas a cada período sejam constantes. Caso tal não se verifique, a qualidade da modulação sai grandemente prejudicada.
O resultado é uma onda quadrada de periodicidade constante ( ), mas duty-cycle (5OP
5OQQ)
variável, onde os degraus positivos são resultado de uma diferença positiva entre modulador e portador. O resultado negativo desta operação dá origem aos degraus negativos.
22 Revisão da Literatura
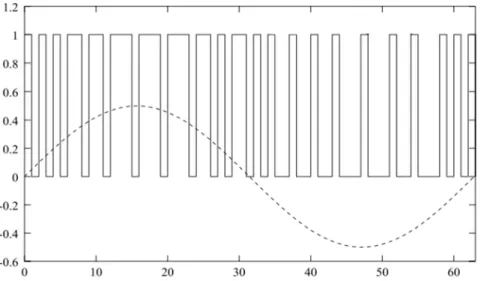
Figura 2.18 – Formas de onda da modulação PWM [1]
Um aspeto importante a ter em conta é que a qualidade da modulação aumenta em conjunto com o aumento da frequência da onda portadora, pois nesta situação o sinal é quantificado em períodos de tempo mais curtos, resultando numa diminuição do erro de quantificação. Pelo teorema da amostragem de Nyquist, o valor desta frequência deve ser no mínimo igual ao dobro da frequência máxima do sinal modulador, contudo, para obtenção de resultados práticos aceitáveis, o mesmo deverá assumir no mínimo uma razão dez vezes superior à frequência do modulador [7].
Esta técnica tem a vantagem de conseguir desempenhar plenamente a sua função a frequências de amostragem relativamente baixas (em torno de 500 kHz), o que neste caso concreto é vantajoso do ponto de vista das perdas por comutação dos MOSFETs. Por outro lado, as baixas frequências de comutação são mais difíceis de filtrar, o que aumenta as exigências do filtro passa-baixo de saída, tornando-o maior e mais dispendioso.
2.6 Classe D 23
Figura 2.19 - Espetro de frequências da modulação PWM
Do ponto de vista do espetro das frequências associado a este tipo de modulação, verifica-se pela Figura 2.19 que todos os harmónicos da fundamental têm componentes na sua vizinhança que formam uma espécie de envolvente com amplitudes que no máximo são iguais à da componente de interesse. Para além disso, é de notar que os harmónicos de ordem ímpar são demasiado acentuados, podendo até ter uma amplitude superior à da fundamental, que aqui é modulada com atenuação.
2.6.4.2
Modulação da Densidade de Pulso
A abordagem de Modulação da Densidade de Pulso (Pulse Density Modulation - PDM) traduz o sinal a modular numa sequência de apenas um bit, fazendo uma representação da amplitude através da densidade de um determinado valor lógico (0 ou 1) em determinado intervalo de tempo. Esta é uma técnica de modulação em oversampling, ou seja, o sinal modulador é quantificado a uma frequência muitas dezenas de vezes superior à sua própria, o que proporciona uma melhor resolução e folga os requisitos do filtro de saída.
24 Revisão da Literatura
Este tipo de operação resulta numa onda quadrada de frequência não fixa, o que por vezes torna difícil o cálculo e análise de determinados parâmetros inerentes ao seu funcionamento. Nestes casos, os mesmos são normalmente feitos para o pior cenário.
A técnica PDM mais reconhecida tem o nome de Modulação _Σ e é resultado da evolução da Modulação ∆.
2.6.4.2.1
Modulação
∆∆∆∆
Esta técnica tira partido da capacidade de previsão associada à quantificação de um sinal, uma vez que a variação do valor médio de amostragem para amostragem não é grande [8]. Assim, este pode ser razoavelmente “adivinhado” tendo em conta o seguimento dos valores anteriores. Claramente, há aqui um erro associado que deve ser muito menor do que o valor de pico a pico do sinal a modular.
Na saída é usado o código de um bit (que lhe atribui também reconhecimento por Modelação de um bit) para guardar informação sobre a variação da amplitude da entrada.
Figura 2.21 – Diagrama de blocos da Modulação ∆
Estes são gerados a uma frequência ditada pelo sinal de clock no comparador e posteriormente são realimentados por intermédio de um integrador, dando assim origem a um sinal em degraus ( ), cujo objetivo é seguir a entrada. Após a subtração entre a entrada e este último, o erro gerado (s) é comparado com um determinado threshold no comparador, que posteriormente originará os impulsos. Quando ‘s’ é positivo, é colocado na saída um pulso também positivo de amplitude ∆, para que assim se aproxime do sinal de entrada. A resposta inversa acontece quando a diferença é negativa.
2.6 Classe D 25
Figura 2.22 – Formas de onda da Modulação ∆ [8]
No início do processo de modulação, o valor de é incrementado degrau a degrau até atingir o valor de 4. A amplitude destes incrementos é reconhecida por ∆ (de onde advém o nome do processo), que regra geral tem um valor fixo estipulado pelo projetista. Contudo, existem também soluções em que este mesmo valor é automaticamente adaptado às variações de 4, para assim evitar os casos de sobrecarga de variação. Tal fenómeno ocorre quando 4 varia de forma demasiado brusca para ser acompanhado por , comportamento este que está intimamente relacionado com a frequência de amostragem aplicada. Todavia, sabendo que a variação máxima de modulação é R × ∆, o cumprimento da condição
× ∆T UáW X8 4 585 X previne a ocorrência deste sintoma.
A modulação ∆ não promove bons resultados no que diz respeito à transmissão digital de sinais analógicos, tendo a sua aplicação sido feita em sistemas onde este fator não é importante. Uma das suas principais desvantagens é a dependência que o SNR do sinal de saída tem da sua própria frequência [8].
Porém, este foi o ponto de partida para a evolução que deu origem a uma técnica de modulação de melhor qualidade, conhecida por Modulação ∆Σ [9].
2.6.4.2.2
Modulação
∆∆∆∆ΣΣΣΣ
A presente abordagem tem uma arquitetura idêntica à modulação ∆, mas agora com a capacidade de proporcionar resultados de elevada qualidade [9].
26 Revisão da Literatura
A principal e única alteração é a mudança de posição do integrador da malha de realimentação para antes do comparador. Assim se compreende o nome atribuído, pois ao sinal de entrada é subtraído um degrau de amplitude ∆, seguido de uma integração que faz a operação somatória (Σ).
O princípio básico de funcionamento pode ser compreendido através da análise da resposta a uma entrada DC [10]:
• O integrador coloca na sua saída uma rampa, que é o resultado da soma do valor DC na entrada;
• Quando o valor da integração atinge o do threshold do comparador, no rising-edge seguinte do clock, a sua saída é atualizada com o valor lógico um;
• Na realimentação, a saída positiva do comparador experimenta um ganho de modo a obter o valor _ pretendido e de seguida é subtraída ao sinal de entrada, o que resulta numa descida do sinal integrado.
Com este processo, o resultado da modulação será uma cadeia de bits cuja densidade do valor que transportam num determinado intervalo de tempo representa a modulação da amplitude do sinal de entrada.
Figura 2.24 – Formas de onda da modulação ∆Σ com sinal de entrada DC de valor não nulo positivo [11] De notar que a amplitude de _ deve ser sempre superior à amplitude do sinal a modular, para que o resultado da subtração seja sempre um valor negativo de modo a fazer descer a saída do integrador. Nos casos em que tal condição não se verifica, o processo satura e só retorna ao funcionamento normal quando o sinal de entrada desce para valores abaixo de _ [12].
Tendo em conta que a escala de modulação é dada por YZP
Y[ × 100, tem-se que esta nunca
deve ser igual ou superior a 100%, para assim preservar o sucesso da modulação e tornar possível de obter os valores de SNR ditados pela teoria, sem o fenómeno de saturação.
É importante ter em atenção que a saída do comparador só é atualizada a cada ciclo do
clock, podendo assim o sinal do integrador permanecer acima do valor de threshold durante
um intervalo de tempo que no máximo é igual a um ciclo de amostragem. Desta forma, quanto maior for , maior será a qualidade da modulação, pois a atualização da saída é feita a intervalos mais curtos, o que minimiza o erro de quantificação.
2.6 Classe D 27
Figura 2.25 – Modelo linear no domínio discreto de um modulador ∆Σ [10]
Na figura anterior está representado o modelo linear de um modulador _Σ no domínio discreto, onde o comparador é representado pela introdução de um erro E(z). Por análise do diagrama, chega-se à seguinte expressão para a saída
V z
1. U z ' 1 ^ z
_`E z ,
(2.8)onde a função de transferência do sinal (STF) é igual à unidade, enquanto que a do erro (NTF) representa uma subtração entre o valor atual e o seu anterior. Esta última proporciona o fenómeno denominado de noise-shaping, que se traduz na capacidade de “empurrar” as componentes de sinal não desejadas para altas frequências, de preferência acima da largura de banda do sinal a modular [10]. Este tipo de comportamento deve-se ao facto de a NTF ser constituída por um zero na origem e um polo cuja frequência é ditada pelo projetista, criando assim uma resposta do tipo passa-alto. Usualmente o valor do polo é um pouco inferior a metade da frequência de amostragem, de modo a provocar uma atenuação das componentes de sinal introduzidas pela onda quadrada de período variável à saída da modulação, pois esta é realimentada e subtraída ao sinal a modular [13]. A sua frequência máxima é de bc
& (uma vez
que a mudança de estado, no máximo, dá-se a cada ciclo de clock) e a mínima ronda &bc.
Figura 2.26 – STF e fenómeno de noise shaping para uma modulação ∆Σ de ordem 1 e 2 Com este tipo de comportamento, o filtro passa-baixo de saída do amplificador terá facilidade em eliminar os componentes de sinal não desejados, uma vez que estes são arrastados para frequências muito acima da sua frequência de corte, promovendo a qualidade da amplificação [2].
![Figura 2.1 – Topologia básica de um amplificador de áudio de três andares [1]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15610593.1053559/23.892.302.649.756.1050/figura-topologia-básica-de-amplificador-áudio-três-andares.webp)
![Figura 2.7 – Formas de onda da tensão nos coletores de TR3 e TR4 de um amplificador de classe G [1]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15610593.1053559/30.892.232.630.179.480/figura-formas-onda-tensão-nos-coletores-amplificador-classe.webp)
![Figura 2.11 – Impacto do fator de qualidade na resposta em frequência de um filtro Butterworth passa- passa-baixo de segunda ordem [2]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15610593.1053559/34.892.196.684.111.422/figura-impacto-qualidade-resposta-frequência-filtro-butterworth-segunda.webp)

![Figura 2.15 - Formas de onda da recuperação do díodo de corpo de um MOSFET [5]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15610593.1053559/38.892.268.605.105.567/figura-formas-de-onda-recuperação-díodo-corpo-mosfet.webp)
![Figura 2.27 - Espectro da saída de um modulador ∆Σ de ordem 1 [10]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15610593.1053559/46.892.148.727.117.393/figura-espectro-da-saída-de-modulador-σ-ordem.webp)
![Figura 2.29 – Traçado do SNR versus OSR para diferentes ordens de modulação [11]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15610593.1053559/47.892.206.738.737.1102/figura-traçado-snr-versus-osr-diferentes-ordens-modulação.webp)