ECHIPAMENT AC
IONAT CU MU CHI PNE
UMATICI DESTINAT
RECUPERĂRII PACIEN ILOR CU AFEC IUNI POS
TTRAUMATICE
ALE ARTICULA IEI COT
ULUI
PNEUMATIC MUSCLE ACTUATED EQUIPMENT FOR THE
REHABILITATION OF PATIENTS WITH POST-TRAUMATIC
AFFECTIONS OF THE ELBOW JOINT
Georgiana VETRICE
PhD researcher, TransilvaniaUniversity of Brașov, e-mail: vetrice.georgiana@unitbv.ro
Coordinator: prof. univ. dr. Andrea DEACONESCU
Abstract
Loss of motion following joint surgery is a common complication and has negative effects on individuals. The diminished motion autonomy of persons suffering from post-traumatic affections of the elbow joint can be addressed by continuous passive motion, a treatment method entailing constant moving of the joint, however, without requiring any patient effort. The paper presents a novel type of rehabilitation equipment for the elbow joint, using this technique. The novelty consists in the utilization of pneumatic muscles as actuators and in the two axes of motion. Pneumatic actuation presents benefits from compliance, meaning favourable response to commands, due to air compressibility, as well as from an excellent force-to-weight ratio.
Key words:rehabilitation equipment, continuous passive motion, pneumatic muscle, elbow joint
1. Introducere
Această lucrare prezintă o variantă constructivă de echipament de reabilitare a articulației cotului, destinat pacienților cu dizabilități, care în urma unor traumatisme au rămas cu incapacitatea de a folosi membrul superior, parțial sau total.
Principalul obiectiv al acestuia este recâștigarea în totalitate a funcțiilor motrice.
Din punct de vedere fiziologic, cotul realizează două mișcări:
flexie-extensie (rotirea antebrațului spre braț, respectiv rotirea în sens invers a brațului flectat) și pronație-supinație (rotirea antebrațului în jurul axei sale longitudinale, policele apropiindu-se de trunchi, respectiv depărtându-se de acesta).
Refacerea articulației lezate este posibilă prin aplicarea unei serii controlate de mișcări, fără contracția propriu-zisă a mușchiului de la
1. Introduction
The paper presents an innovative constructive solution for elbow rehabilitation equipment, intended for patients with disabilities, who consequently to trauma retained the total or partial inability of using their upper limb. The equipment is designed to allow the full recovery of the diminished or lost motor functions.
Physiologically, the elbow achieves two movements: flexion-extension (rotation of the forearm towards the arm and rotation of the bent arm in the opposite direction) and pronation-supination (rotation of the forearm by its longitudinal axis, the thumb moving towards the body and away from it, respectively).
nivelul regiunii lezate, metodă ce poartă denumirea de mișcare pasivă continuă. Această tehnică este realizată cel mai eficient cu ajutorul unui echipament de reabilitare special conceput.
2. Echipamente de reabilitare
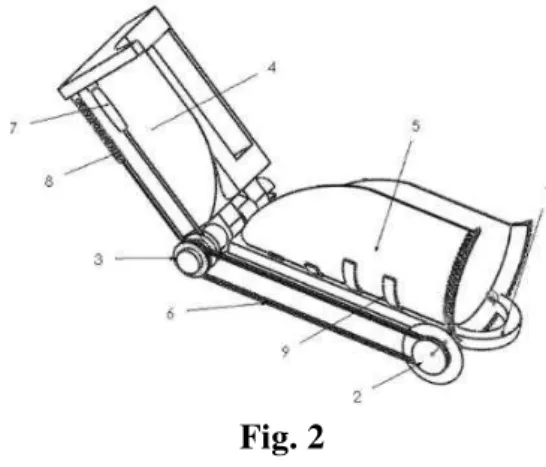
Echipamentele de reabilitare se împart în două categorii: mono-articulare și pluri -articulare, în funcție de numărul articulațiilor afectate. La momentul actual, majoritatea echipamentelor disponibile pe piață sunt acționate electric, iar câteva, care au făcut obiectul unor brevete, sunt acționate pneumatic. Dintre acestea, în Fig. 1 este prezentat un produs al firmei Fisiotek, un model de echipament de reabilitare a articulației cotului acționat electric, iar în Fig. 2 este ilustrat un brevet obținut de Universitatea Xi’an Jiaotong din China, care a realizat un dispozitiv medical de reabilitare a cotului acționat cu mușchi pneumatici.
3. Sisteme de ac ionare cu ajutorul mu chilor pneumatici
În [1] se remarcă faptul că sistemul de acționare pneumatic prezintă numeroase avantaje, printre care cele mai importante sunt: greutatea scăzută a componentelor, reacția rapidă la comenzi, complianța, datorată compresibilității aerului și ușurința în utilizare.
Mușchiul pneumatic este un sistem cu membrană contractantă care prezintă proprietatea de a își mări diametrul și micșora lungimea sub acțiunea aerului comprimat.
the area of injury, a method called continuous passive motion.
This technique can be best achieved by means of specially designed equipment.
2. Rehabilitation equipment
Rehabilitation devices can be mono-articular or pluri-mono-articular, depending on the number of affected joints.
At present the majority of rehabilitation equipment available on the marketplace is driven by electric motors, and only few are actuated pneumatically, being the object of industrial patents.
Of these, Fig. 1 shows an electrically driven model of elbow rehabilitation equipment (Fisiotek), and Fig. 2 illustrates a patent obtained by Xi’an Jiaotong University of China for a pneumatic muscle actuated elbow medical rehabilitation device.
3. Pneumatic muscle based actuations systems
As highlighted in literature [1] the pneumatic actuation system has multiple benefits, like:
low weight of the components, favourable response to commands, also known as compliance, due to air compressibility, and easy deployment.
The pneumatic muscle is a system based on a contracting membrane, which enlarges its diameter and diminishes its length when fed compressed air.
Astfel, acesta efectuează o cursă direct proporțională cu nivelul presiunii de alimentare. Potrivit [1], Fig. 3 prezintă modul de funcționare al unui mușchi pneumatic.
Un mușchi artificial pneumatic conține un tub interior, realizat dintr-un material elastic, învelit cu o țesătură multistratificată, pentru a îi conferi rezistență și protecție. Fig. 3 prezintă și geometria învelişului tubului.
În [2] și [3] se remarcă faptul că atunci când tubul este alimentat cu aer comprimat acesta își mărește diametrul, iar geometria țesăturii are un comportament similar cu cel al unei perechi de foarfece, transformând extinderea radială în contracție liniară (maximum 20% din lungimea mușchiului în stare relaxată).
Conform [4], unghiul de înfășurare a țesăturii, notat cu α, are valoarea de 25,4° în stare relaxată a mușchiului și valoarea de 54,7° în stare maxim contractată. Forța dezvoltată de un mușchi pneumatic se calculează cu relația (1):
în care p este presiunea de lucru, iar d diametrul interior al mușchiului pneumatic. Potrivit [5], comportamentul mușchiului pneumatic este asemănător cu cel al unui resort, însemnând că la efectuarea cursei maxime forța dezvoltată este egală cu zero. În Fig. 4 este reprezentat graficul dintre forța dezvoltată de mușchiul pneumatic, unghiul de înfășurare și presiunea de alimentare.
Thus, the pneumatic muscle performs a stroke directly proportional with the feed pressure. According to [1], Fig. 3 shows the working principle of a pneumatic muscle.
A pneumatic artificial muscle consists of an inflatable inner tube, made from an elastic material, wrapped in a multilayer tissue for strength and protection. Fig. 3 also presents the geometry of the tissue enveloping the interior tube.
As pointed out in [2] and [3], when the tube is fed compressed air and enlarges its diameter, the geometry of the tissue behaves like a pair of scissors and transforms this radial increase into linear contraction (maximum 20% of the relaxed muscle length).
According to [4], the enveloping angle of the tissue, denoted by α, is of 25.4° in the relaxed state of the muscle and of 54.7° at maximum contraction. The force developed by a pneumatic muscle is given by (1):
where p is the working pressure and d the interior diameter of the pneumatic muscle. As asserted in [5], the behaviour of the pneumatic muscle is similar to that of a spring, meaning that the developed force becomes zero as soon as the maximum stroke has been completed. Fig. 4 shows the graph of the force developed by a muscle versus the enveloping angle and feed pressure.
2 2 2
cos 1
1 cos 3 d 4 p
F (1)
4. Echipamentul de reabilitare propus
Echipamentul propus este destinat reabilitării cotului şi este capabil să realizeze mișcarea pasivă continuă cu ajutorul a două perechi de mușchi pneumatici. Modelul geometric este prezentat în Fig. 5.
Mușchii pneumatici folosiți în construcția echipamentului au diametrul de 10 mm și lungimea în stare relaxată de 300 mm. După cum se poate vedea, extremitatea liberă a fiecărui mușchi este legată de un fir petrecut peste o rolă și fixat. Astfel, prin alimentarea cu aer comprimat, mișcarea în contratimp a mușchilor determină rotația arborelui în jurul axei sale longitudinale, generând mișcarea suportului mâinii.
În Fig. 6 este prezentată poziția mâinii pacientului în timpul recuperării, precum și modalitatea de amplasare a mușchilor pneumatici în raport cu brațul uman în vederea executării mișcărilor de flexie -extensie și pronație-supinație. Se poate observa faptul că prima pereche de mușchi realizează mișcarea de flexie-extensie, iar cea de-a doua mișcarea de pronație-supinație.
Rotația încheieturii se realizează cu ajutorul mușchilor pneumatici care sunt într-o
4. Proposed rehabilitation equipment
The proposed equipment is designed for elbow rehabilitation and is capable of performing continuous passive motion by means of two pairs of pneumatic muscles. The geometrical model is presented in Fig. 5.
The pneumatic muscles used in the construction of the equipment have 10 mm diameters and initial lengths of 300 mm. As illustrated, the free end of each muscle is connected to a cable, drawn over a pulley and fixed.
Thus, by feeding compressed air, the agonist-antagonist movement of the pair of muscles causes the rotation of the shaft by its longitudinal axis, moving the hand support.
Fig. 6 presents the position of the patient’s hand during recovery, and also the positioning of the pneumatic muscles in relation to the human arm in order to achieve the flexion-extension and pronation-supination movements. Evidently, the first pair of muscles carries out flexion-extension, while the second one carries out pronation-supination.
The rotation of the joint is generated by means of a pair of agonist-antagonist
Fig. 5. Pneumatic muscles for
pronation-supination Hand support
relație agonist-antagonist (când unul se contractă, altul se relaxează). Fig. 7 conține schema cinematică a modulului de rotație.
pneumatic muscles (while a muscle contracts, the other one relaxes). Fig 7 shows the kinematics of the rotation module.
5. Concluzii
Una dintre cele mai comune complicații survenite în urma intervențiilor chirurgicale asupra articulațiilor este lipsa mobilității membrului. Mișcarea pasivă continuă urmăreşte restabilirea funcțiilor articulaţiei lezate, prin aplicarea asupra acesteia a unei serii de mișcări, fără autosolicitarea mușchilor pacientului.
În această lucrare este prezentat un model de echipament de reabilitare a articulației cotului acționat cu mușchi pneumatici. Avantajele principale ale acestor actuatori constau în raportul scăzut greutate proprie – forţă, utilizarea aerului ca mediu de lucru ecologic, complianţă și ușurința în utilizare.
References
5.Conclusion
One of the most common postoperative complications of joint surgery is loss of the limb’s mobility. Continuous passive motion allows the regaining of the functions of the injured joint, by setting it into a range of motions, without self-straining of the patient’s muscles.
This paper presents and discusses a model of elbow joint rehabilitation equipment actuated by pneumatic muscles. The benefits of such actuators are a low eigenweight-to-force ratio, the utilisation of air as an environment-friendly medium, compliance, and easy deployment.
[1] DEACONESCU, T., DEACONESCU A. (2009) Pneumatic muscle actuated isokinetic
equipment for the rehabilitation of patients with disabilities of the bearing joints In:
Proceedings of the International MultiConference of Engineers and Computer Scientists (IMECS), Vol. 2, pp. 1823-1827.
[2] DAERDEN, F., LEFEBER D. (2002) Pneumatic artificial muscles: actuators for robotics and
automation. In: European Journal of Mechanical and Environmental Engineering, Vol. 47, nr. 1, p.
11-21.
[3] KENNETH, K.K., BRADBEER, R. (2006) Static model of the Shadow muscle under
pneumatic testing, Department of Electric Engineering, City University of Hong Kong.
[4] DAERDEN F., LEFEBER D. (2001) The concept and design of pleated pneumatic
artificial muscles. In: International Journal of Fluid Power, Vol. 2, nr. 3, p. 41-50.
[5] DAVIS S.T., CALDWELL D.G. (2001) The biomimetic design of a robot primate using
pneumatic muscle actuators. In: 4th International Conference on Climbing and Walking
Robots CLAWAR.