combinations
Hongguo Xu
1, Yihua Zhang
1, Hongfei Liu
1, Shaosen Qi
2and Weijuan Li
1Abstract
The optimum configuration parameters of tractor–trailer combinations for lateral stability performance are proposed by adjusting the length of dolly and the second trailer’s center of gravity. A linear yaw plane model of vehicle combinations is adopted for dynamic analysis, and the model is calibrated by TruckSim. According to the yaw rate rearward amplifica-tion ratio of lateral response index, and combining the simulaamplifica-tion results of MATLAB/Simulink, dolly and the second trai-ler are the dominate factors for lateral stability of vehicle combinations. Simulation results show that the distance between articulation joints of dolly is 1.6 m; simultaneously, the rate of distance between front hitch and center of gravity of the second trailer to its front and rear wheelbase is 0.41 and may gain the best lateral performance. Compared with configuration parameters of the original vehicle combinations, the results also illustrate that the one derived from adjust-ment approach reduces high-speed rearward amplification ratio by 11.4%. The proposed approach might be used for identifying desired design variables of the tractor–two trailer combinations and provided theoretical basis for stability tests.
Keywords
Transport engineering, tractor–trailer combinations, lateral performance, configuration parameters, rearward amplifica-tion ratio
Date received: 13 July 2015; accepted: 16 October 2015
Academic Editor: Yongjun Shen
Introduction
Double-trailer combinations consist of a tractor, first trailer, a dolly, and second trailer, and also known as tractor–trailer combinations or tractor/full-trailer com-binations.1The advantages of tractor–trailer combina-tions are not only limited to the reduction in the congestion problems but also included economic and environmental benefits. However, unstable motion modes of tractor–trailer combinations, such as jack-knifing, trailer swing, trailer lateral oscillations, and roll-over,2 are caused by its big size, heavy weights, larger center of gravity (CG) height, articulated joints, and complex configurations. From a safety perspective, conflicting views exist among transport experts, and
there are some concerns about maneuverability and stability issues of tractor–trailer combinations which have been interested various in this field.
The study by J Aurell et al.3and G Bo´zsva´ri et al.4 argued that tractor–trailer combinations have in gen-eral better dynamic stability or as stable as
1Laboratory of Automobile Safety, College of Traffic, Jilin University,
Changchun, China
2Project Department, Jinan Boiler Erection and Maintenance
Corporation, Jinan, China
Corresponding author:
Hongfei Liu, Laboratory of Automobile Safety, College of Traffic, Jilin University, Changchun 130022, Jilin, China.
Email: hongfeiliu@jlu.edu.cn
conventional combinations. A Aoki et al.5have investi-gated the effects of multiple axles on lateral dynamics of multi-articulated vehicles using a linear planar model, and non-oscillatory stability and steering sensi-tivity in steady-state turning are analyzed using a stabi-lity factor. P Fancher and C Winkler6 have reviewed the directional performance issues in evaluation and design of articulated heavy vehicles. For the effects of different design configuration parameters such as ber of articulation joints, wheelbase length, and num-ber of axles on the safety of heavy vehicle combinations, refer to the article by PS Fancher and A Mathew.7 In order to improve the lateral stability of tractor–two trailer combinations, active steering based8 and braking based9 of the trailer control systems are proposed. Compared with configuration parameters for designing tractor–trailer combinations, control methods have its limits.
All the above studies lack the optimum configura-tion parameters related to dolly and the second trailer, which have great effects on lateral stability of tractor– trailer combinations. In addition, different speeds, the distance between articulation joints of dolly, and CG of the second trailer have influence on the lateral per-formance of vehicle combinations.
The rest of this article is organized as follows. Section ‘‘Modeling and verification’’ describes the lin-ear yaw plane model of tractor–trailer combinations, and model verification is made by comparing with TruckSim. The proposed yaw rate rearward amplifica-tion ratio (RWA) for lateral performance measure of vehicle combinations is presented in section ‘‘Lateral performance measures.’’ Section ‘‘Simulation results and discussion’’ presents the relationship among differ-ent speeds, the distance between articulation joints of dolly, the CG location of the second trailer, and the yaw rate RWA in this model. Finally, conclusions are drawn in section ‘‘Conclusion and forward.’’
Modeling and verification
In order to investigate the effects of configuration para-meters on lateral dynamics of vehicle combinations, which refers to Figure 1, an appropriate model is made and validated the fidelity of the developed model by TruckSim.
Vehicle combinations model
A linear dynamic model, including lateral motions, yaw motions of each unit, and articulation angle between two units, is considered. In this model, aerodynamic forces, rolling and pitching motions, and longitudinal forces between tire and road are ignored; vehicle units are considered as rigid masses and frame flexibility is neglected; and the left and right wheels of each axle are equal to steer angle (refer to Figure 2).
From Newton’s laws of dynamics, the equations of motion for the tractor are written as
Figure 1. Illustration of tractor–two trailer combinations.
m2ðv2_ +u2v2Þ=Fyr2Fy2+Fy3 I2v2_ = Fyr2s5Fy2s4Fy3s6
ð2Þ
The equations of motion for dolly are casted as
m3ðv3_ +u3v3Þ=Fyr3Fy4+Fy5 I3v3_ = Fyr3s8Fy4s7Fy5s9
ð3Þ
The equations of motion for the second trailer are casted as
m4ðv4_ +u4v4Þ=Fyr4Fy6 I4v4_ = Fyr4s11Fy6s10
ð4Þ
where the notation is given in Appendix 1.
To derive the simplified vehicle model, the following assumptions have been made:
1. The model is at constant speed; 2. The tractor steer angledfis small;
3. The articulation angle Ci (i= 1, 2, 3) is rela-tively small;
4. The lateral tire force is linear functions of side-slip angle.
So
u1=u2=u3=u4 ð5Þ
Fx1=Fx2, Fy1=Fy2, Fx3=Fx4, Fy3=Fy4, Fx5=Fx6, Fy5=Fy6
ð6Þ
Fyf=kiaiði=1,2,3,4,5Þ ð7Þ
where
a1=ðv1+v1s1Þ u1 df
a2=ðv1v1s2Þ u1
a3=ðv2v2s5Þ u2
a4=ðv3v3s8Þ u3
a5=
v4v4s11
ð Þ
u4
And the relationship between yaw rate and articula-tion angle of each unit is
v1=v2+c_1 ð8aÞ
v2=v3+c_
2 ð8bÞ
_
v1v2_ v1s3_ v2s4_ =u1v1+u1v2 ð9aÞ
_
v2v_3v2_ s6v3_ s7= u1v2+u1v3 ð9bÞ
_
v3v4_ v3s9_ v4s10_ =u1v3+u1v4 ð9cÞ
Finally, eliminating the joint force and putting the equations together in state space form, then giving the model of four vehicle units as
_
X=AX+BU ð10Þ
The matrices AandB are provided in Appendix 2. The state vectorXand control vectorUare expressed as
X=½v1,v2,v3,v4,w1,w2,w3,w4TandU=df
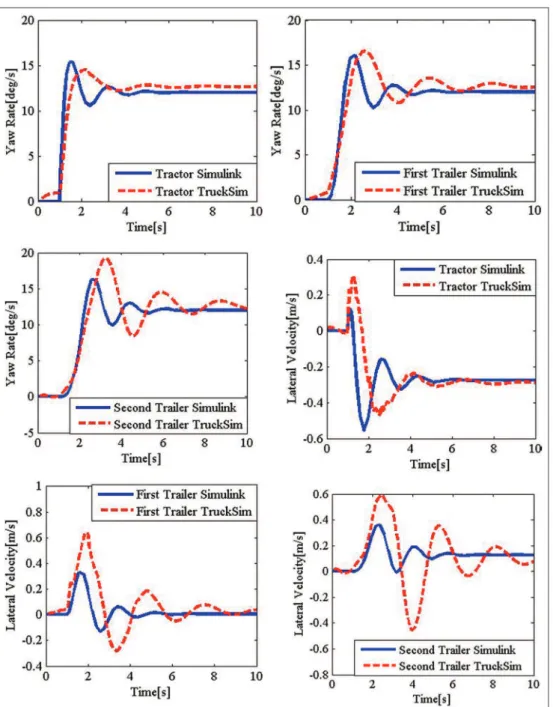
Model verification
To evaluate the fidelity of the developed model of tractor–trailer combinations, one type of tractor–trai-ler–dolly–trailer combinations in TruckSim has been used. The data of Simulink and TruckSim are the same, selecting yaw rate and lateral velocity in different simu-lation environments to verify whether the developed model is correct.
As it is depicted in Figure 3, yaw rate and lateral velocity of tractor, first trailer, and second trailer in Simulink and TruckSim have consistent trends. But the results in TruckSim have oscillation apparently, espe-cially lateral velocity. It is due to the rolling motion of sprung mass, suspension, nonlinear tire models, and so on, which are considered in the software. Consequently, results from MATLAB/Simulink and TruckSim are conformed to a large extent, which verify the accuracy of the developed model.
Lateral performance measures
RWA =v4max v1max
ð11Þ
Note thatv1maxandv4maxare the peak yaw rate of the tractor and the second trailer, respectively.
Simulation results and discussion
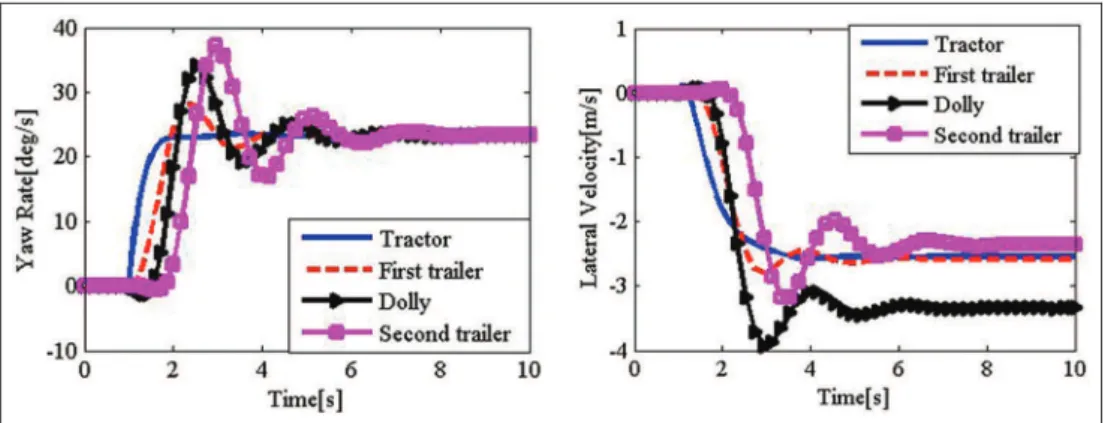
The vehicle combinations speed is set at 20 m/s (72 km/h), and the steering angle of front wheels is 0.086 rad in step response. The data of simulation come from the Nihon University.5The simulation results are depicted in Figure 4.
Figure 4 shows that dolly and the second trailer are the main factors in lateral stability of tractor–trailer combinations. Yaw rate of the second trailer increased dramatically to 37.2°/s, prone to instability. When the
vehicle speed reaches a certain degree, a little steer angle of tractor can be quickly restore to a steady-state situation; however, the inertia of the trailer main-tains the original state of motion. In addition, between tractor and the second trailer have different time lags, which make the combinations easier to roll-over in steering and trailer lateral oscillations largely after steering. Then the yaw rate RWA of combinations is 1.58.
Therefore, the study in lateral stability of tractor– trailer combinations should take different vehicle speeds, configuration parameters of dolly, and the sec-ond trailer into consideration. The optimum para-meters will help the drivers choose the appropriate steering angle with different speeds and provide the ref-erence in the length of dolly and CG of the second trai-ler for designer.
Effects of different vehicle speeds on lateral
performance
To improve transport efficiency while fuel-saving, the tractor–trailer combinations are driven generally in medium or high speed. Vehicle speed is chosen as 15–25 m/s (54–90 km/h), combining with the developed model and lateral performance measures, to analyze different speed effects on the yaw rate RWA at the same steer angle of tractor front wheels, which is 0.086 rad. All the different speeds are in steady-state steering which has been verified by TruckSim.
Figure 5 shows that the yaw rate RWA increases along with the increase in speed. When the vehicle speed is less than 17 m/s, the lateral performance RWA is less than 1, which indicated that trailer swing or lat-eral oscillation will not happen. While the vehicle com-binations speed is 24–25 m/s, the second trailer swings so sharply that causes lateral instability in transient response. Therefore, in order to reduce the incidence possibility of lateral swing instability, the driver should slow down in advance or make small-angle turning in high speed.
Effects of dolly on lateral performance
The dolly is used to connect first trailer and second trailer. It plays a vital role in stability of the vehicle combinations. The distance between articulation joints of dolly is selected to analyze the effects of dolly on the yaw rate RWA of the vehicle combinations in
high-speed steering. Suppose that the vehicle high-speed is 20 m/s (72 km/h), and the steer angle of front wheels is 0.086 rad.
Figure 6 shows that when the distance between articulation joints of dolly approaches to 2 m, the rate of changing curve is in exponential growth, and the vehicle combinations prone to instability. When the distance is close to 0.5 m, the second trailer swings apparently, while the distance is 1.6 m, the yaw rate RWA of tractor–trailer combinations is in the mini-mum value, which makes the best lateral stability of vehicle combinations in high-speed steering. In conse-quence, the distance between articulation joints of dolly should design appropriately for better lateral perfor-mance of vehicle combinations.
Effects of the second trailer on lateral performance
The CG location of the second trailer tends to be the most significant factor for the risk of rearward amplifi-cation. Research on the second trailer is important and necessary for lateral performance.Figure 4. State variables of tractor–trailer combinations.
By defining the following term
e= s10
s10+s11 ð12Þ
whereeis the rate, which is the distance between articu-lation joints and CG of the second trailer to the
distance between front and rear wheelbase of it. Suppose that the vehicle speed and the steering angle of the front wheels are constant.
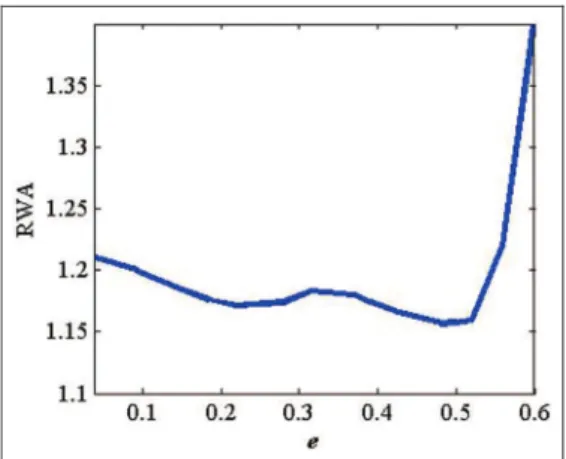
Figure 7 shows that the CG location of the second trailer has a significant impact on the RWA of lateral performance. When shifting to rear and settingeat 0.6, the yaw rate RWA increases exponentially and the vehicle combinations trend to instability. When eis at 0.4–0.5, the yaw rate RWA reduced obviously; espe-cially, when eis at 0.48, the yaw rate RWA is in the minimum value, which means that the vehicle combina-tion is safer in transient response. In order to improve the driving stability at high speed, the CG location of the second trailer should be in front of its center.
The optimum configuration parameters
In order to acquire the optimum configuration para-meters for vehicle combinations, dolly and the second trailer are adjusted on the basis of the minimum RWA above, setting the distance between articulation joints of dolly at 1.6 m, as well as the ratioeof the second trai-ler at 0.41 by trying a lot of simulation results.
Compared with Figure 4, Figure 8 shows that the yaw rate and the lateral velocity of dolly and the second trailer have reduced obviously. The yaw rate RWA is 1.4 and the one derived from adjustment reduces RWA by 11.4%.
Conclusion and forward
The developed model of tractor–two trailer combina-tions for lateral performance analysis is proposed, which is also verified by TruckSim. By selecting the optimum configuration parameters for minimum RWA of vehicle combinations, the obtained conclusions are as follows:
1. The distance between articulation joints of dolly and the CG location of the second trailer are the Figure 6. The relationship between dolly and RWA.
Figure 7. The CG location of the second trailer and RWA.
3. By adjusting the configuration parameters of dolly and the second trailer in tractor–trailer combinations, the yaw rate RWA is reduced by 11.4%.
Forward
The vehicle combination is simplified as a linear yaw plane model, ignoring the rolling and nonlinear tire model and so on, which will be studied in the future.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial sup-port for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of vehicle and road cooperative security evolution state (51078167).
References
1. Jindra F. Handling characteristics of tractor-trailer com-binations. SAE technical paper 650720, 1965.
2. Vlk F. Lateral dynamics of commercial vehicle combina-tions a literature survey. Vehicle Syst Dyn 1982; 11: 305–324.
3. Aurell J, Wadman T and Trucks V.Vehicle combinations based on the modular concept. NVF-reports, report 1/2007, http://www.nvfnorden.org/lisalib/getfile.aspx?itemid=260 4. Bo´zsva´ri G, Fu¨lep T and Palkovics L. Driving dynamics
and stability issues of the European road train concepts. In: International conference on heavy vehicles, Paris, France, 19–22 May 2008, pp.91–96.
5. Aoki A, Marumo Y and Kageyama I. Effects of multiple axles on the lateral dynamics of multi-articulated vehi-cles.Vehicle Syst Dyn2013; 51: 338–359.
6. Fancher P and Winkler C. Directional performance issues in evaluation and design of articulated heavy vehi-cles.Vehicle Syst Dyn2007; 45: 607–647.
7. Fancher PS and Mathew A. Safety implications of vari-ous truck configurations. Umtri Research Review 1989; 19: 36.
8. Kharrazi S, Lidberg M, Roebuck R, et al. Implementa-tion of active steering on longer combinaImplementa-tion vehicles for enhanced lateral performance.Vehicle Syst Dyn2012; 50: 1949–1970.
9. Sun T, He Y and Ren J. Dynamics analysis of car-trailer systems with active trailer differential braking strategies. SAE technical paper, 2014-01-0143, 2014.
Appendix 1
Notation
Fyf lateral force acted on the front
axle of tractor
Fy1 lateral force acted on the rear axle
of tractor
Fy2 lateral force acted on the rear axle
of the first trailer
Fy3 lateral force acted on the rear axle
of dolly
Fy4 lateral force acted on the rear axle
of the second trailer
Fxi(i= 1, 2, 3) lateral force at the articulation
joint
Fyi(i= 1, 2, 3) longitudinal force at the
articulation joint
I1 moment of inertia of tractor
about itszaxis
I2 moment of inertia of the first
trailer about itszaxis
I3 moment of inertia of dolly about
itszaxis
I4 moment of inertia of the second
trailer about itszaxis
k1 cornering stiffness of the front
wheel of tractor
k2 cornering stiffness of the rear
wheel of tractor
k3 cornering stiffness of the wheel of the first trailer
k4 cornering stiffness of the wheel of dolly
k5 cornering stiffness of the wheel of the second trailer
m1 total mass of tractor
m2 total mass of the first trailer
m3 total mass of the dolly
m4 total mass of the second trailer
s1 distance between front axle and
center of gravity of tractor
s2 distance between rear axle and
center of gravity of tractor
s3 distance between hitch and center
of gravity of tractor
s4 distance between front hitch and
center of gravity of the first trailer
s5 distance between rear axle and
s6 distance between rear hitch and center of gravity of the first trailer
s7 distance between front hitch and
center of gravity of dolly
s8 distance between rear axle and
center of gravity of dolly
s9 distance between rear hitch and
center of gravity of dolly
s10 distance between front hitch and
center of gravity of the second trailer
s11 distance between rear axle and
center of gravity of the second trailer
ui(i= 1, 2, 3, 4) longitudinal speed of theith unit vi(i= 1, 2, 3, 4) lateral speed of theith unit
a1 side-slip angle of front wheel of
tractor
a2 side-slip angle of rear wheel of
tractor
a3 side-slip angle of wheel of the first trailer
a4 side-slip angle of wheel of dolly
a5 side-slip angle of wheel of the
second trailer
df steer angle of front wheel of
tractor
C1 articulation angle of tractor and
the first trailer
C2 articulation angle of the first
trailer and dolly
C3 articulation angle of dolly and the
second trailer
v1 yaw rate of tractor
v2 yaw rate of the first trailer
v3 yaw rate of dolly
v4 yaw rate of the second trailer
Appendix 2
The vehicle combinations model system matrices
A=M1p, B=M1q
M=
m1 m2 m3 m4 0 0 0 0
m1s3 0 0 0 I1 0 0 0
0 m2s4 m3ðs4+s6Þ m4ðs4+s6Þ 0 I2 0 0
0 0 m3s7 m4ðs7+s9Þ 0 0 I3 0
0 0 0 m4s10 0 0 0 I4
1 1 0 0 s3 s4 0 0
0 1 1 0 0 s6 s7 0
0 0 1 1 0 0 s9 s10
2 6 6 6 6 6 6 6 6 6 6 4 3 7 7 7 7 7 7 7 7 7 7 5 p=
p11 p12 p13 p14 p15 p16 p17 p18 p21 p22 p23 p24 p25 p26 p27 p28 p31 p32 p33 p34 p35 p36 p37 p38 p41 p412 p43 p44 p45 p46 p47 p48 p51 p52 p53 p54 p55 p56 p57 p58 p61 p62 p63 p64 p65 p66 p67 p68 p71 p72 p73 p74 p75 p76 p77 p78 p81 p82 p83 p84 p85 p86 p87 p88 2 6 6 6 6 6 6 6 6 6 6 4 3 7 7 7 7 7 7 7 7 7 7 5
In matrixp, the relevant elements are given as
p11=
k1+k2
ð Þ
u1 ; p12= k3
u1; p13= k4 u1
p14= k5 u1
; p15=
k1s1k2s2
ð Þ
u1m1u1
; p16=
k3s5 u1m2u1
p17= k4s8
u1m3u1; p18=
k5s11 u1m4u1
p21=
k1ðs1+s3Þ+k2ðs3s2Þ
½
u1 ;
p22=p23=p24=p26=p27=p28=0
p25=ðk1ðs1+s3Þs1k2ðs3s2Þs2Þ u1m1s3u1
p31=p35=0; p32=k3ðs4+s5Þ
u1 ;
p33=k4ðs4+s6Þ u1
; p34= k5ðs4+s6Þ u1
p36=
k3ðs4+s5Þ u1+m2s4u1
p37= k4ðs4+s6Þs8 u1+m3ðs4+s6Þu1
; p38= k5ðs4+s6Þs11 u1+m4ðs4+s6Þu1
p41=p42=p45=p46=0
p43=k4ðs7+s8Þ u1 ; p44=
k5ðs7+s9Þ
u1
p47=
k4ðs7+s8Þs8
u1+m3s7u1 ; p48=
k5ðs7+s9Þs11 u1+m4ðs7+s9Þu1
p51=p52=p53=0; p54=