ESCOLA SUPERIOR DE SAÚDE
LICENCIATURA EM FISIOTERAPIA
PROJECTO E ESTÁGIO PROFISSIONALIZANTE II
TREINO DE MARCHA SUSPENSA ROBOTIZADA
(LOKOMAT) EM PACIENTES COM LESÃO
VERTEBRO-MEDULAR INCOMPLETA
Catarina Maria Pais Mendes Estudante de Fisioterapia Escola Superior de Saúde - UFP
18626@ufp.edu.pt
Maria Armanda Cabral Mestre Assistente
Universidade Fernando Pessoa - FCS mcabral@ufp.edu.pt
Resumo: A lesão vertebro-medular (LVM) é uma das piores formas de incapacidade susceptíveis
de atingir o ser humano. O seu tratamento visa a máxima recuperação das capacidades que foram afectadas, sendo o restabelecimento da função locomotora, o mais normal possível, o principal objectivo na maioria dos casos. O Lokomat é uma ortótese robotizada, desenvolvida
“recentemente”, que permite a optimização da referida função. Objectivos: Resumir artigos acerca do tema abordado, de modo a poder realizar comparações entre os resultados por eles obtidos. Verificar a eficácia do treino de marcha suspensa robotizada (TMSR) no tratamento de pacientes com LVM incompleta. Métodos: Este estudo é resultado de uma pesquisa computorizada realizada na base de dados B-on, a fim de identificar artigos de revisão e experimentais sobre o efeito do TMSR no tratamento de indivíduos com LVM incompleta. Apenas foram seleccionados estudos publicados entre os anos de 2000 e 2010. A pesquisa também incluiu livros científicos. Conclusão: Os estudos revisados referem benefícios na aplicação do TMSR e pacientes com LVM incompleta, contudo, não são precisos relativamente aos seus efeitos específicos a nível dos centos geradores de padrões de locomoção.
Palavras-Chave: “lesão vertebro-medular”, “medula espinal”, “centros geradores de padrões de
locomoção”, “neuroplasticidade”,“marcha suspensa manualmente assistida”, “marcha suspensa robotizada”, “lokomat”.
Abstract: The spinal cord injury (SCI) is one of the worst types of incapacities able to affect the human being. The treatment of people suffering from incomplete SCI aims the highest recovery of the capacities that have been affected. The recovery of the locomotor function, as normal as possible, is the main goal of the majority of the situations. The Lokomat is a robotic device, recently developed, that allows the improvement of the function mentioned above. Objectives: To gather articles about the subject mentioned and to sum them up, so that we can compare their results. To check the efficacy of the robotic locomotor therapy in the treatment of patients with incomplete SCI. Methods: This work is the result of a computer research carried out in the B-on database, in order to identify revision and experimental articles about the effect of the robotic locomotor therapy in the treatment of individuals with incomplete SCI. Only studies published between the years of 2000 and 2010 were selected. The research also included scientific books.
Conclusion: The studies revised refer benefits in the use of robotic locomotor therapy in patients
1
1.
Introdução:
A lesão medular é, indubitavelmente, uma das mais dramáticas formas de incapacidade que podem afectar o ser humano. Reflectindo acerca da função fisiológica da medula, não apenas como transmissor de impulsos e mensagens do cérebro para todas as partes do corpo e vice-versa, mas também como um centro nervoso que controla funções como: postura, micção, respiração, regulação térmica, função sexual, entre outras, tomamos consciência das consequências que uma lesão a este nível acarreta (Faria, 2006). Especialmente quando se instala de forma súbita, é uma das lesões mais devastadoras, do ponto de vista orgânico e psicológico (Andrade et al., 2007).
Em doentes com lesão vertebro-medular (LVM) incompleta a aquisição de um padrão de marcha, o mais semelhante possível do normal constitui um dos principais objectivos a atingir no que diz respeito ao tratamento. O treino de marcha suspensa constitui uma das técnicas que surgiu no decorrer de investigações focadas para o aumento da funcionalidade e independência dos utentes com esta patologia, indo de encontro aos objectivos principais de reabilitação (Santos, 2009).
Inicialmente, quando o treino de marcha suspensa começou a ser aplicado, dois fisioterapeutas assistiam o movimento dos membros inferiores, enquanto o paciente se encontrava em cima de um tapete rolante em movimento, sendo que a posição dos fisioterapeutas era ergonomicamente desfavorável para os mesmos. A fim de ultrapassar esta e outras limitações, foi desenvolvida, pela empresa Hocoma, uma ortótese mecânica denominada Lokomat que, além de possibilitar o movimento dos membros inferiores através de um sistema robotizado, no tapete rolante em movimento, possui um sistema de sustentação associado que permite o suporte parcial do peso corporal (Colombo et al., 2001).
2
2.
Metodologia:
Foi efectuada uma pesquisa bibliográfica, em livros e através da Internet, nomeadamente nas bases de dados Pubmed e B-on, com o intuito de encontrar artigos que permitem fundamentar este trabalho. As palavras-chave utilizadas na pesquisa realizada foram: “lesão vertebro-medular”, “lokomat”, “marcha suspensa robotizada”, “treino de marcha suspensa robotizada”, “spinal cord injury”, “treadmill training”, “driven gait orthosis”. A pesquisa encontra-se limitada aos últimos dez anos, isto é, apenas estão incluidos neste projecto artigos, no mínimo, de 2000. Este Projecto constitui uma revisão bibliográfica acerca do tema: marcha suspensa robotizada em pacientes com lesão vertebro-medular incompleta.
3.
Desenvolvimento:
3.1. Coluna Vertebral:
A coluna vertebral faz parte do esqueleto ósseo e está situada na região posterior do tronco, ao longo da sua linha média. Consiste em 33 vértebras unidas por ligamentos e cartilagens. As 24 vértebras superiores são separadas e móveis, mas as 9 inferiores são fixas; 5 são fundidas para formar o sacro e as 4 últimas são geralmente fundidas para formar o cóccix. É composta por 7 vértebras cervicais (C1-C7), 12 torácicas (T1-T12), 5 lombares (L1-L5), 5 sacras (S1-S5) e 4 coccígeas (C1-C4) e apresenta várias curvaturas consideradas fisiológicas. A coluna cervical, em relação à parte ventral do corpo, é convexa, a torácica, côncava e a lombar convexa, com a sua curva terminando no ângulo lombossacro. A coluna vertebral é constituída por uma série de vértebras acolchoadas por discos intervertebrais (Groot, cit in Simões, 2008).
3.2 Medula Espinal:
A medula espinal é um meio vital de comunicação entre o encéfalo e o sistema nervoso periférico, abaixo da cabeça. Aloja as principais fibras que inervam os nossos músculos, estímulos sensoriais aferentes que nos permitem percepcionar o meio ambiente e arcos reflexos envolvidos em mecanismos do sistema nervoso autónomo e homeostase (Richardson et al., 2008).
3
seguinte distribuição: oito cervicais, doze torácicos, cinco lombares, cinco sagrados e um coccígeo. Cada um destes nervos é composto por uma raiz motora e por outra sensitiva. Os corpos celulares dos neurónios motores situam-se no corno anterior (ventral) da medula espinal, enquanto os corpos celulares dos neurónios sensitivos se encontram nos gânglios espinhais (raiz dorsal). A formação da medula espinal não é regular, apresentando duas dilatações: a intumescência cervical e a intumescência lombar. A dilatação cervical na região cervical inferior corresponde ao local onde os nervos que servem os membros superiores entram e saem da medula. A última afunila-se para formar o cone medular. É designada por cauda equina o conjunto das raízes motoras e sensitivas que descem da extremidade terminal da medula, para alcançarem os foramens intervertebrais respectivos (Simões, 2008).
Um corte transversal da medula mostra que a sua região central é formada por substância cinzenta e na região periférica por substância branca. Ao centro situa-se um diminuto canal, que se estende a todo o comprimento da medula, contendo líquido céfaloraquidiano, denominado canal epêndimo. A substância cinzenta compreende de cada lado um canal anterior grosso, uma zona peri-ependimária e um corno posterior afilado. A substância branca compreende um cordão lateral e um cordão posterior; só este último está nitidamente separado, os outros dois comunicam à frente do corno cinzento anterior, por isso se fala por vezes do cordão ântero-lateral (Simões, 2008). A substância branca também está organizada em regiões denominadas colunas: anterior, lateral e posterior. Os funículos são constituídos por axónios mielinizados, organizados em tractos sensitivos (ascendentes) e motores (descendentes), que conduzem impulsos nervosos entre o encéfalo e a medula espinal (Tortora, 2000).
Os nervos sensitivos na espinal medula recebem e transmitem informação sensitiva para o cérebro. Os nervos motores enviam a informação desde o cérebro até às outras partes do corpo, dando origem às funções motoras, permitindo o movimento e regulando o sistema nervoso autónomo (respiração e tensão arterial) (Seeley et al., 1997).
4
descendentes. As fibras nervosas no interior dos tratos são, em geral, mielinizadas e denominadas de acordo com a sua terminação (Graaff, 2003).
3.3 Lesão Vertebro-Medular:
Traumatismo vertebro-medular é uma lesão traumática,caracterizada por um conjunto de situações que acarretam comprometimento da função da medula espinal em grausvariados de extensão (Meyer cit in Siscão et al., 2007). Segundo DeLisa (2002), os traumatismos vertebro-medulares constituem um processo traumático da medula que pode originar alterações das funções motoras, sensoriais e autonómicas. Na paraplégia o comprometimento é das extremidades inferiores enquanto a tetraplégia se refere ao comprometimento de membros superiores e inferiores.
Uma lesão vertebro-medular origina uma perda das funções sensitiva e motora abaixo do nível de lesão. Em tetraplégicos a recuperação da função do braço/antebraço e mão constitui o objectivo primordial, apesar de a estabilidade do tronco e aquisição de marcha constituirem também uma prioridade. Em paraplégicos,a estabilidade do tronco e a aquisição de um padrão de marcha o mais próximo do normal são os principais objectivos (Lam et al. 2005).
5
3.3.1. Etiologia
As lesões medulares dividem-se em duas catergorias: lesões traumáticas e não-traumáticas. As causas mais frequentes de lesões medulares traumáticas são acidentes automobilísticos, actos de violência, quedas, lesões desportivas (O’Sullivan e Schmitz, 2004). Dados apontados por Cardoso (cit in Simões, 2006), indicam que “a primeira causa de lesão medular em Portugal é traumática, sendo prioritaritariamente motivada pelos acidentes de viação (39%)”.Dentro das lesões não traumáticas incluem-se processos degenerativos, vasculares, neoplásicos e infecciosos (Faria, 2006).
3.3.1.2 Mecanismo de lesão
O traumatismo da medula espinhal resulta em alterações decorrentes da transferência de energia cinética do trauma para o tecido nervoso (processo denominado de lesão primária). Mecanismos secundários da lesão que abrangem uma sequência de reacções bioquímicas e celulares desencadeadas pelo trauma primário, directamente dependentes do tempo pós-lesão (lesão secundária), contribuem também para as consequências do traumatismo (Nicholls E Schwab cit in Souza et al.,2006) Além do tecido nervoso, a lesão da medula espinal atinge os elementos vasculares. A alteração do fluxo sanguíneo no interior da medula e a consequente redução da perfusão tecidual pós-traumática são um componente importante da lesão medular traumática. A isquemia tecidual pode ser induzida pela lesão directa do leito vascular, pelo espasmo ou pela oclusão dos vasos sanguíneos. A libertação de mediadores químicos no momento do trauma, a hipotensão pós-traumática e a perda do mecanismo de auto-regulação são factores adicionais que contribuem para a alteração do fluxo sanguíneo intramedular (Appenzeller e Zochodne
cit in Souza et al., 2006).
3.3.3. Designação do nível de lesão
6
registrada como completa em C6 à direita e completa em C7 à esquerda. Essa designação pode ser abreviada para C6 (D) completa e C7 (E) completa (O’Sullivan e Schmitz, 2004).
3.3.4. Classificação das lesões medulares
3.3.4.1 Lesões Incompletas
As lesões incompletas caracterizam-se pela preservação de alguma função sensorial ou motora abaixo do nível da lesão, incluindo os segmentos sacrais, o que indica que algum tecido neural viável cruza a área de lesão, dirigindo-se para segmentos mais distais. As lesões incompletas normalmente resultam de contusões produzidas pela pressão sobre a medula devido ao osso e/ou tecidos moles deslocados ou devido ao edema dentro do canal medular. É possível alguma recuperação, ou mesmo recuperação completa da contusão quando a fonte de pressão é aliviada. As lesões incompletas podem também ter como causa a transecção parcial da medula (O’Sullivan e Schmitz, 2004).
3.3.4.2. Lesões completas
Numa lesão completa existe perda sensitiva e paralisia motora total abaixo do nível da lesão, devido à interrupção completa dos tractos nervosos ascendentes e descendentes (Adler, cit in Polia, 2007)
3.3.4.3 Síndromes
7
lombossacrais abaixo do cone medular, com perda motora (paralisia flácida) e sensitiva correspondentes às raízes lesionadas (Casalis cit in Polia, 2007).
3.3.5. Avaliação da Lesão Vertebro-Medular
Segundo Berhman (2005), o sistema da Associação Americana de Lesões da Coluna - American Spinal Injury Association (ASIA) é o sistema recomendado para avaliação sensitiva e motora após uma LVM. (Em Anexo)
3.4. Reabilitação neurológica
3.4.1. Neuroplasticidade
Segundo Neves et al., (cit in Cerini, 2006), a neuroplasticidade define-se por uma mudança adaptativa na estrutura do sistema nervoso, que ocorre em qualquer estágio da ontogenia, em função da interacção com o ambiente interno ou externo, ou ainda, como resultado de traumatismos ou outras lesões que afectem o ambiente neural. A plasticidade pode resultar de dois mecanismos gerais: plasticidade dependente da actividade – onde mudanças funcionais e estruturais nas propriedades celulares e sinápticas ocorrem como resultado de alterações no padrão de actividade da rede neural ou das sinapses (Zucker e Reghr cit in Parker, 2006), ou através de neuromodulação – causada por alterações mediadas por neurotransmissores nas propriedades celulares ou sinápticas (Katz cit in Parker, 2006). A plasticidade é um componente importante para a função da rede neural. Uma rede com propriedades fixas só poderia gerar uma gama limitada de saídas. A plasticidade permite dotar cada componente da rede de propriedades funcionais e estruturais, possibilitando que cada rede individual gere um leque de saídas. Apesar de ser uma enorme vantagem adaptativa, por outro lado, ela complica a análise da rede (Parker, 2006).
8
específica pode modelar o nível de inibição presente nas redes neurais que geram essa tarefa (Cai et al., 2006).
Dentro da abordagem tradicional de fisioterapia recorre-se ao estímulo da função existente pós-lesão, através de métodos compensatórios nas lesões completas, ou de reaprendizagem motora em função da neuroplasticidade nas lesões incompletas. Numa perspectiva de regeneração neural e respectiva função, recorre-se ao estímulo da função comprometida através de métodos mecânicos mais intensivos, associados a prévia terapia celular regenerativa (Cerini, 2006).
Dependendo da gravidade da lesão, alguma recuperação da função sensorial e motora ocorre ao longo das semanas subsequentes ao traumatismo. O mecanismo de recuperação pode incluir: recuperação axonal, rearranjos sinápticos e alterações nas propriedades celulares nos circuitos neurais que se mantiveram intactos (Rossignol et al., cit in Girgis et al., 2007).
A variabilidade numa simples sequência de passos mesmo sob condições controladas demonstra a versatilidade e a complexidade na activação do sistema espinal associado (Cai et al., 2006)
3.4.2. Centros geradores de padrões de locomoção
Os centros geradores de padrões de locomoção (CGPL) são circuitos neurais (redes de neurónios interligados), localizados na medula espinal, que interagem com funções sensoriais específicas responsáveis pela locomoção. A interacção de informação sensorial específica com os CGPL é essencial para o sucesso da função locomotora (Dietz et al., 2004).
A organização dos CPGL oferece às vias descendentes dos centros supra-espinais a possibilidade de agir sobre a função locomotora, modulando a função de alguns músculos ou grupos musculares interligados funcionalmente, permitindo, assim, desencadear ou interromper a marcha e determinar a velocidade. (Lucareli, 2009) Os moduladores espinais sofrem influências supra-espinais provenientes da ponte e região subtalâmica. A mais importante é a zona locomotora mesencefálica que age conjuntamente com a região subtalâmica. Outras regiões importantes são os núcleos cuneiforme e colinérgico pedunculo-protuberancial e a substância reticulada do tronco cerebral (Viel e Van de Crommert et al., cit in Lucareli, 2009).
9
humanos. A explicação para este facto pode basear-se numa característica especial da marcha humana: ser bípede, o que implica dependência dos sistemas descendentes que controlam a postura durante a locomoção. Logo, as redes neuronais da espinal-medula estarão, provavelmente, mais dependentes dos centros supra-espinais que nos animais quadrúpedes (Winchester et al., 2005).
A fim de permitir um movimento harmonioso e sem limitação, no qual ocorre simultaneamente a extensão do joelho e a inibição do grupo muscular responsável pela flexão do mesmo, os centros geradores de padrão de locomoção geram automaticamente padrões excitatórios que intervêm a esse nível. A coluna lombar pode ser treinada (total ou parcialmente isolada do controle do córtex cerebral), para dar resposta ritmada, com registos electromiográficos similares aos observados durante a marcha, através de um sistema de treino de marcha suspensa sobre o tapete rolante (Santos, 2009).
Segundo Santos (2009), a existência dos CGPL é difícil de demonstrar definitivamente, uma vez que requer observações da oscilação de redes neuronais na sequência da lesão medular completa, contudo, estudos realizados em seres humanos evidenciaram a oscilação das redes neuronais em interacção com o input aferente, encontrando-se o input supraespinal limitado ou inexistente (Dietz et al., 2004).
3.5 Treino de marcha
Segundo Dietz (2004), a recuperação da função locomotora em indivíduos com lesão vertebro-medular incompleta é variável. Estudos desenvolvidos pelos mesmos autores, concluíram que estes indivíduos, após integrarem um plano de treino de marcha suspensa robotizada revelam melhoras no padrão de marcha. No que diz respeito a lesões completas, posteriormente não existe recuperação espontânea da função locomotora (Girgis, 2007).
10
3.5.1. Treino de Marcha Suspensa Manualmente Assistida
A marcha no solo, a velocidade suficiente para produzir efeitos neurofisiológicos, é bastante difícil no caso de pacientes com lesão vertebro-medular. O suporte do peso corporal constitui uma alternativa segura e eficaz, especialmente durante a fase aguda da lesão. O treino com suporte do peso corporal permite aumentar a velocidade da marcha, fornece informações sensoriais e de descarga de peso bilaterais que contribuem para melhorar os padrões motores eferentes (Lucareli, 2009).
Para que os CGPL sejam estimulados, é necessário que haja suporte do peso corporal, contudo esse suporte não pode ser total (Santos, 2009) A diminuição da sustentação do peso corporal aumenta a estimulação aferente nos CGPL, tendo como consequência uma melhoria dos efeitos do treino sobre o tapete rolante, activando de forma mais eficiente os centros motores, e padrões recíprocos de actividade entre agonistas e antagonistas (Jezernik et al.; Maegele et al., cit in Santos, 2009).
O treino de marcha suspensa manualmente assistida é realizado com o paciente no tapete rolante, suportado por um sistema de suspensão. O movimento dos membros inferiores é assistido manualmente por dois fisioterapeutas. Um input aferente eficaz para a espinal-medula só é conseguido se os membros se movimentarem de um modo reproduzível, sempre com o mesmo ritmo e parâmetros fisiológicos. Este input aferente é essencial para estimular os CGPL, de tal modo que estes sejam capazes de activar os músculos dos membros inferiores que não possuem capacidade de realizar movimentos voluntários (Colombo et al., 2000; Rossignol, 2001).
3.5.2. Treino de Marcha Suspensa Robotizada
11
O Lokomat é composto por um exoesqueleto com dois braços que fornecem ao paciente suporte na cintura pélvica e nos membros inferiores, através de dispositivos de tamanho ajustável, interligados ao exoesqueleto (um em cada coxa e dois em cada pé). O comprimento das pernas é ajustado para alinhar as ancas e os joelhos de cada indivíduo com o eixo do exoesqueleto. A cintura pélvica é suportada em posição neutra, por fitas elásticas fixas e atadas em redor da cabeça dos metatarsos. A cintura pélvica e o tronco são suportados por fita auto-adesiva ligada ao suporte de tronco. Esta ortótese é controlada por um computador programado, motores de corrente contínua e dispositivos conectados às articulações dos joelhos e das ancas, que providenciam um padrão locomotor recíproco, consistente com a cinemática da marcha humana normal e sincronizados com a velocidade do tapete rolante (Wirz et al., 2005).
O Lokomat possui dois graus de liberdade por membro inferior (flexão e extensão da anca e do joelho no plano sagital). As articulações são accionadas por motores lineares, incluindo codificadores de posição e células de carga (transdutores de forças). A posição e tamanho dos dispositivos que se adaptam aos membros inferiores do paciente são ajustáveis. Durante o treino de marcha, a ortótese move-se de acordo com um padrão de marcha (trajectória) predefinida (Lünenburger et al., 2004).
12
O treino de marcha suspensa robotizada em pacientes com lesão vertebro-medular possui algumas limitações. É um sistema passivo, na medida em que segue uma trajectória pré-determinada, na qual não a cinemática dos membros inferiores não é modificada de acordo com a força gerada pelo paciente. Trata-se de um sistema limitado no que diz respeito à velocidade, dado que, para as ortóteses mecânicas poderem gerar uma marcha confortável a velocidade não pode ser elevada, ficando abaixo de 2.5km/h, que está no limite do valor mais baixo recomendado para o treino de marcha suspensa. Por último, cria-se uma ligação física entre os pacientes e o sistema robotizado, na qual estes ao longo do treino estão sujeitos a uma estimulação aferente que não está presente na locomoção em solo firme, devido em grande parte ao suporte elástico colocado no pé (promovendo a dorsiflexão no período oscilante da marcha). A transição do treino de marcha robotizado para o treino de marcha suspensa manualmente assistido é necessária para que este seja mais efectivo. (Hornby et al., 2005).
13
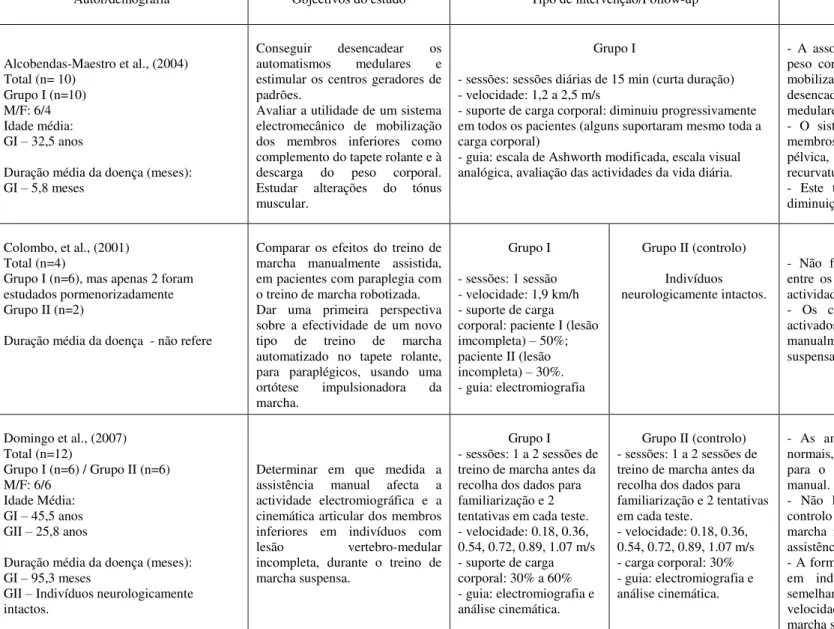
Autor/demografia Objectivos do estudo Tipo de intervenção/Follow-up Resultados
Alcobendas-Maestro et al., (2004) Total (n= 10)
Grupo I (n=10) M/F: 6/4 Idade média: GI – 32,5 anos
Duração média da doença (meses): GI – 5,8 meses
Conseguir desencadear os automatismos medulares e estimular os centros geradores de padrões.
Avaliar a utilidade de um sistema electromecânico de mobilização dos membros inferiores como complemento do tapete rolante e à descarga do peso corporal. Estudar alterações do tónus muscular.
Grupo I
- sessões: sessões diárias de 15 min (curta duração) - velocidade: 1,2 a 2,5 m/s
- suporte de carga corporal: diminuiu progressivamente em todos os pacientes (alguns suportaram mesmo toda a carga corporal)
- guia: escala de Ashworth modificada, escala visual analógica, avaliação das actividades da vida diária.
- A associação de um tapete rolante ao suporte do peso corporal com um sistema electromecânico de mobilização dos membros inferiores consegue desencadear automatismos de flexão e extensão medulares.
- O sistema electromecânico de mobilização dos membros inferiores melhora a verticalização axial e pélvica, optimiza a dissociação de cinturas e evita a recurvatura dos joelhos em carga.
- Este tipo de treino de marcha consegue uma diminuição significativa da espasticidade.
Colombo, et al., (2001) Total (n=4)
Grupo I (n=6), mas apenas 2 foram estudados pormenorizadamente Grupo II (n=2)
Duração média da doença - não refere
Comparar os efeitos do treino de marcha manualmente assistida, em pacientes com paraplegia com o treino de marcha robotizada. Dar uma primeira perspectiva sobre a efectividade de um novo tipo de treino de marcha automatizado no tapete rolante, para paraplégicos, usando uma ortótese impulsionadora da marcha.
Grupo I
- sessões: 1 sessão - velocidade: 1,9 km/h - suporte de carga corporal: paciente I (lesão imcompleta) – 50%; paciente II (lesão incompleta) – 30%. - guia: electromiografia
Grupo II (controlo)
Indivíduos neurologicamente intactos.
- Não foram encontradas diferenças significativas entre os dois métodos de treino, tendo em conta a actividade electromiográfica dos membros inferiores. - Os centros nervosos da medula espinal são activados de forma similar pelo treino de marcha manualmente assistida e pelo treino de marcha suspensa robotizada.
Domingo et al., (2007) Total (n=12)
Grupo I (n=6) / Grupo II (n=6) M/F: 6/6
Idade Média: GI – 45,5 anos GII – 25,8 anos
Duração média da doença (meses): GI – 95,3 meses
GII – Indivíduos neurologicamente intactos.
Determinar em que medida a assistência manual afecta a actividade electromiográfica e a cinemática articular dos membros inferiores em indivíduos com lesão vertebro-medular incompleta, durante o treino de marcha suspensa.
Grupo I - sessões: 1 a 2 sessões de treino de marcha antes da recolha dos dados para familiarização e 2 tentativas em cada teste. - velocidade: 0.18, 0.36, 0.54, 0.72, 0.89, 1.07 m/s - suporte de carga corporal: 30% a 60% - guia: electromiografia e análise cinemática.
Grupo II (controlo) - sessões: 1 a 2 sessões de treino de marcha antes da recolha dos dados para familiarização e 2 tentativas em cada teste.
- velocidade: 0.18, 0.36, 0.54, 0.72, 0.89, 1.07 m/s - carga corporal: 30% - guia: electromiografia e análise cinemática.
- As amplitudes e perfis de activação muscular normais, nos sujeitos com LVM foram semelhantes para o treino de marcha com e sem assistência manual.
- Não houve grande semelhança entre o grupo controlo e o grupo experimental nem no treino de marcha manualmente assistido, nem no treino sem assistência manual, excepto para o vasto lateral. - A forma e o tempo dos padrões electromiográficos em indivíduos com LVM tornaram-se menos semelhantes aos do grupo de controlo em velocidades superiores, especialmente no treino de marcha sem assistência manual.
14
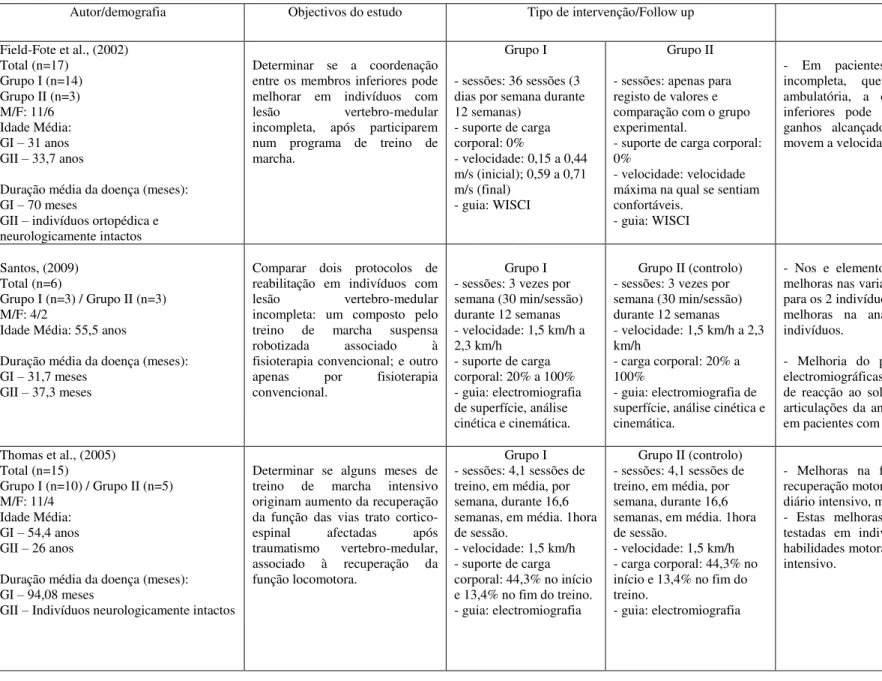
Autor/demografia Objectivos do estudo Tipo de intervenção/Follow up Resultados
Field-Fote et al., (2002) Total (n=17)
Grupo I (n=14) Grupo II (n=3) M/F: 11/6 Idade Média: GI – 31 anos GII – 33,7 anos
Duração média da doença (meses): GI – 70 meses
GII – indivíduos ortopédica e neurologicamente intactos
Determinar se a coordenação entre os membros inferiores pode melhorar em indivíduos com lesão vertebro-medular incompleta, após participarem num programa de treino de marcha.
Grupo I
- sessões: 36 sessões (3 dias por semana durante 12 semanas)
- suporte de carga corporal: 0%
- velocidade: 0,15 a 0,44 m/s (inicial); 0,59 a 0,71 m/s (final)
- guia: WISCI
Grupo II
- sessões: apenas para registo de valores e comparação com o grupo experimental.
- suporte de carga corporal: 0%
- velocidade: velocidade máxima na qual se sentiam confortáveis.
- guia: WISCI
- Em pacientes com lesão vertebro-medular incompleta, que possuem alguma capacidade ambulatória, a coordenação entre os membros inferiores pode melhorar através do treino. Os ganhos alcançados persistem mesmo quando se movem a velocidades superiores.
Santos, (2009) Total (n=6)
Grupo I (n=3) / Grupo II (n=3) M/F: 4/2
Idade Média: 55,5 anos
Duração média da doença (meses): GI – 31,7 meses
GII – 37,3 meses
Comparar dois protocolos de reabilitação em indivíduos com lesão vertebro-medular incompleta: um composto pelo treino de marcha suspensa robotizada associado à fisioterapia convencional; e outro apenas por fisioterapia convencional.
Grupo I - sessões: 3 vezes por semana (30 min/sessão) durante 12 semanas - velocidade: 1,5 km/h a 2,3 km/h
- suporte de carga corporal: 20% a 100% - guia: electromiografia de superfície, análise cinética e cinemática.
Grupo II (controlo) - sessões: 3 vezes por semana (30 min/sessão) durante 12 semanas - velocidade: 1,5 km/h a 2,3 km/h
- carga corporal: 20% a 100%
- guia: electromiografia de superfície, análise cinética e cinemática.
- Nos e elementos sujeitos a TMSR, verificam-se melhoras nas variáveis cinéticas e electromiográficas para os 2 indivíduos com menos tempo de evolução e melhoras na análise cinemática para todos os indivíduos.
- Melhoria do padrão de marcha nas variáveis electromiográficas, na componente vertical da força de reacção ao solo e nas variáveis cinemáticas nas articulações da anca e do joelho, sendo mais eficaz em pacientes com menos tempo de evolução.
Thomas et al., (2005) Total (n=15)
Grupo I (n=10) / Grupo II (n=5) M/F: 11/4
Idade Média: GI – 54,4 anos GII – 26 anos
Duração média da doença (meses): GI – 94,08 meses
GII – Indivíduos neurologicamente intactos
Determinar se alguns meses de treino de marcha intensivo originam aumento da recuperação da função das vias trato cortico-espinal afectadas após traumatismo vertebro-medular, associado à recuperação da função locomotora.
Grupo I - sessões: 4,1 sessões de treino, em média, por semana, durante 16,6 semanas, em média. 1hora de sessão.
- velocidade: 1,5 km/h - suporte de carga corporal: 44,3% no início e 13,4% no fim do treino. - guia: electromiografia
Grupo II (controlo) - sessões: 4,1 sessões de treino, em média, por semana, durante 16,6 semanas, em média. 1hora de sessão.
- velocidade: 1,5 km/h - carga corporal: 44,3% no início e 13,4% no fim do treino.
- guia: electromiografia
- Melhoras na função do trato corticoespinal e recuperação motora pode m ocorrer, através de treino diário intensivo, mesmo muitos anos após a lesão. - Estas melhoras são de longa duração, quando testadas em indivíduos que continuam a usar as habilidades motoras que adquiriram através do treino intensivo.
15
Escala de Ashworth: Grau Descrição - 1- Sem aumento de tónus;2- Leve aumento de tónus; 3- Moderado aumento do tónus; 4-Aumento do tónus acentuado; 5- Rigidez em flexão ou extensão
Escala Visual Analógica: Escala de avaliação da dor que varia entre 0 e 10, na qual 0 significa sem dor e 10 corresponde à dor máxima.
WISCI - Walking Index for Spinal Cord Injury (Em Anexo)
ASIA (Em Anexo)
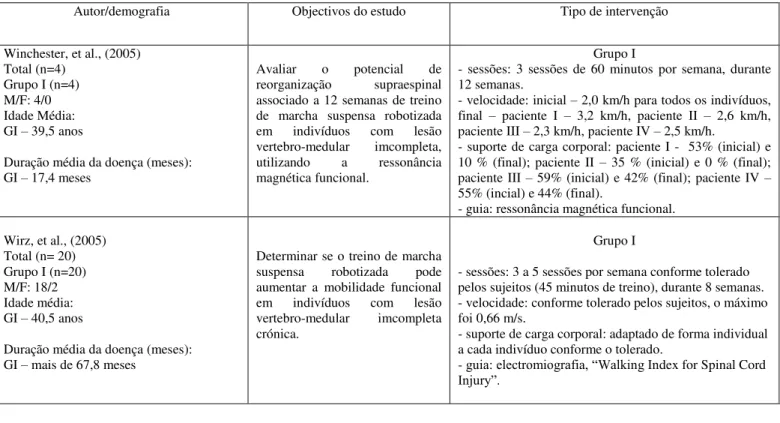
Autor/demografia Objectivos do estudo Tipo de intervenção Resultados
Winchester, et al., (2005) Total (n=4)
Grupo I (n=4) M/F: 4/0 Idade Média: GI – 39,5 anos
Duração média da doença (meses): GI – 17,4 meses
Avaliar o potencial de reorganização supraespinal associado a 12 semanas de treino de marcha suspensa robotizada em indivíduos com lesão vertebro-medular imcompleta, utilizando a ressonância magnética funcional.
Grupo I
- sessões: 3 sessões de 60 minutos por semana, durante 12 semanas.
- velocidade: inicial – 2,0 km/h para todos os indivíduos, final – paciente I – 3,2 km/h, paciente II – 2,6 km/h, paciente III – 2,3 km/h, paciente IV – 2,5 km/h.
- suporte de carga corporal: paciente I - 53% (inicial) e 10 % (final); paciente II – 35 % (inicial) e 0 % (final); paciente III – 59% (inicial) e 42% (final); paciente IV –
55% (incial) e 44% (final).
- guia: ressonância magnética funcional.
- A ressonância magnética revelou um aumento da actividade nas regiões corticais sensório-motoras e cerebelares após o treino de marcha suspensa robotizada.
- O treino de reabilitação através de tarefas intensivas e específicas como marcha suspensa robotizada promove a plasticidade supraespinal dos centros motores que se sabe estarem envolvidos na locomoção. Além disso, as melhoras na locomoção no chão são acompanhadas por uma maior activação do cerebelo.
Wirz, et al., (2005) Total (n= 20) Grupo I (n=20) M/F: 18/2 Idade média: GI – 40,5 anos
Duração média da doença (meses): GI – mais de 67,8 meses
Determinar se o treino de marcha suspensa robotizada pode aumentar a mobilidade funcional em indivíduos com lesão vertebro-medular imcompleta crónica.
Grupo I
- sessões: 3 a 5 sessões por semana conforme tolerado pelos sujeitos (45 minutos de treino), durante 8 semanas. - velocidade: conforme tolerado pelos sujeitos, o máximo foi 0,66 m/s.
- suporte de carga corporal: adaptado de forma individual a cada indivíduo conforme o tolerado.
- guia: electromiografia, “Walking Index for Spinal Cord
Injury”.
- O treino de marcha robotizado resultou em melhoras significativas na velocidade e resistência na marcha dos indivíduos e no desempenho de tarefas funcionais.
- Não houve mudanças significativas na necessidade de auxiliares de marcha, ortóteses ou assistência física externa. Não houve correlação entre as melhoras na velocidade da marcha ou alterações na força muscular ou espasticidade.
- O treino de marcha intensivo no lokomat resulta em mellhoras na marcha.
16
4. Discussão:
Com base na tabela anteriormente exposta, abordarei de uma forma mais pormenorizada alguns dos estudos cuja investigação se centra em seres humanos, focando principalmente aqueles que abordam precisamente o tema: treino de marcha suspensa robotizada. Através da observação e análise dos estudos expostos na tabela podemos extrair determinadas informações relevantes, nomeadamente: o tamanho da amostra que variou entre 4 e 20 participantes; a média das idades encontrava-se entre os 25,8 e os 55,5 anos, sendo notória uma predominância de indivíduos do sexo masculino no geral; a duração média da doença esteve entre os 5,8meses e os 95,3 meses; os critérios de inclusão e exclusão variaram conforme os estudos, por esse motivo, serão descritos de forma individual à medida que abordar cada artigo em particular.
17
tempo de evolução desta patologia. A principal limitação deste estudo foi o reduzido número de pacientes que constituíam a amostra.
Alcobendas-Maetro et al., (2004) levaram a cabo um estudo que inclui um programa de treino de marcha de curta duração. A amostra era composta por 10 indivíduos, sete dos quais apresentavam uma lesão medular cervical, dois dorsal e um lombar. Oito das lesões eram de grau C e as restantes de grau D na escala ASIA. Os critérios de inclusão foram: apresentar LVM incompleta aguda, encontrar-se em situação funcional de bipedestação e tolera-la adequadamente, não ter menos de 16 anos, nem mais de 65. Foram excluídos da amostra os pacientes que apresentavam fracturas instáveis, osteoporose grave, lesões cutâneas ou articulares, ou dismetrias dos membros inferiores com mais de 2 cm, bronconeumopatia ou cardiopatia grave e peso corporal superior a 150kg. As sessões de treino realizaram-se diariamente e tiveram a duração de 15 min. O objectivo do estudo era: comprovar o desencadeamento de automatismos medulares locomotores, registar variações do grau de espasticidade, validar a utilidade de um sistema electromecânico como elemento de mobilização dos membros inferiores e avaliar o valor subjectivo do paciente relativamente aos resultados conseguidos através deste tipo de treino. Houve três abandonos devido a resposta anormal ao esforço e complicações médicas relacionadas. Obteve-se uma clara melhoria nos níveis de espasticidade, a qual se manteve por um período superior a 48horas, permitindo em alguns casos, diminuir a dose de medicação dos pacientes. A dor neuropática diminuiu, em dois dos três pacientes, dois pontos na escala visual analógica. Relativamente às actividades da vida diárias, todos os pacientes referiram realizá-las com maior facilidade. Objectivou-se elevação da linha de biofeedback, tanto maior quanto menor a quantidade de suporte de carga corporal, o que evidencia a existência de automatismos locomotores espinais. A principal limitação deste estudo encontra-se no facto de o programa de treino ter sido curto a nível de tempo, sendo que seria necessário um programa mais longo para evidenciar as alterações mo padrão de marcha e no equilíbrio muscular.
Thomas et al., (2005), avaliaram as vias corticoespinais em pacientes com lesão vertebromedular crónica pela estimulação eléctrica transcraniana e actividade motora máxima de potenciais evocados para os músculos tibial anterior e vasto lateral, na sequência de treino intensivo de marcha com suporte do peso corporal. Concluíram que a percentagem de aumento no potencial motor máximo foi positiva e significativamente correlacionada com o grau de recuperação motora, o qual foi avaliado pelo Walking Index for Spinal Cord Injury
18
durante a deambulação. Estes resultados sugerem que o tracto corticoespinal, se encontra envolvido na recuperação da função locomotora estimulada através do treino de marcha. Wirz et al., (2005), realizaram um estudo com uma amostra de 20 pacientes com LVM incompleta, cujo tempo de evolução da lesão era superior a dois anos. Os critérios de inclusão foram: ter entre 16 e 65 anos, capacidade de permanecer na posição ortostática (manter ou deambular), tempo de evolução da doença de mais de 2 anos, não ter sido submetidos a qualquer tipo de tratamento e manter a mesma dose de medicação anti-espástica ao longo das sessões. Sob estas condições, poderia assumir-se a maioria das alterações do comportamento motor a nível de funcionalidade como resultado do treino de marcha. Os critérios de exclusão foram: presença de alguma doença grave, infecção urinária ou outra, doença tromboembólica, osteoporose significante, contracturas ou espasticidade severa nos membros inferiores que limitassem a amplitude de movimento, história de patologia pulmonar obstrutiva ou restritiva e incapacidade para permanecer na posição ortostática por menos de 45 min sem ortóteses, ter peso superior a 150kg e tamanho do fémur menor que 35 cm ou maior que 47 cm. Os pacientes integraram um plano de treino no Lokomat com a duração de 8 semanas (3 a 5 vezes por semana) e foram avaliados através dos seguintes testes: 10-meter walk test, 6-minute walk test, Time up and Go, e Walking Index for Spinal Cord Injury. Os resultados demonstraram que este tipo de treino promove melhorias na marcha, sendo que houve um aumento da velocidade e facilidade na execução de certas tarefas funcionais. Contudo, não houve alterações significativas na necessidade de utilização de auxiliares de marcha ou outro tipo de auxílio.
19
segundo os autores melhoria da capacidade locomotora no solo. As conclusões deste estudo sugerem que o treino de reabilitação que engloba a repetição de tarefas-específicas, tal como o treino de marcha suspensa, pode promover a plasticidade supraespinal, nos centros motores que se sabe estarem envolvidos na função locomotora. Contudo, mais estudos serão necessários, nos quais a amostra avaliada seja superior, uma vez que esta constitui uma das principais limitações referidas neste estudo.
Torna-se, de certo modo limitada, a possibilidade de comparação entre os artigos referidos anteriormente, uma vez que todos possuem características diferentes, quer a nível de amostra, quer a nível de protocolos executados e também de métodos de avaliação, contudo, uma conclusão geral que é possível retirar da análise comparativa entre todos os artigos é que o treino de marcha suspensa robotizada é eficaz e promove inúmeros benefícios para indivíduos com lesão vertebro-medular incompleta.
É explícito de forma geral, que mais estudos são efectivamente necessários, com amostras superiores e condições mais específicas e controladas, com o intuito de tirar conclusões mais fidedignas a respeito dos efeitos deste tipo de treino de marcha em pacientes com lesões medulares. Isto é perfeitamente compreensível, dado que o Lokomat possui pouco mais de uma década de existência.
5. Conclusão:
A neuroplasticidade pode ser estimulada através de um programa de reabilitação específico, originando um nível de recuperação significativo da marcha em indivíduos com LMV incompleta. Observações realizadas em casos de LVM, na sequência de treino de marcha suspensa, revelaram que o aumento da actividade electromiográfica dos músculos extensores dos membros inferiores, associado à diminuição do suporte do peso corporal, ocorre independentemente da recuperação espontânea da função da espinal-medula. A actividade electromiográfica permanece aumentada, mesmo 3 anos após o fim do treino de locomoção em pacientes com LVM incompleta sujeitos a um treino regular; em indivíduos com LVM, sem estes procedimentos de reabilitação, a mesma diminuiu significativamente.
20 6. Bibliografia
Alcobendas-Maestro, M., López-Dorado, E., Esclarin de Ruz, A., & Valdizán-Valledor, M. C. (2004).
Entrenamiento de la marcha en lesiones medulares incompletas com soporte del peso corporal. Revista de neurologia, 39 (5), 406-410.
Andrade, M., Gonçalves, S. (2007). Lesão medular traumática, recuperação neurológica e funcional.Acta Med Port 2007; 20: 401-406.
Behrman, A. L., Lawless-Dixon, A. R., Davis, S. D., Bowden, M. G., Nair, P.,Phadke, C., et al. (2005).
Locomotor Training Progression and Outcomes After Incomplete SpinalCord Injury. Physical Therapy, 85 (12), 1356-1371.
Cai., L. L., Courtine, G., Fong, A. J., Burdick, J. W., Roy, R. R., & Edgerton, V.R. (2006). Plasticity of functional connectivity in the adult spinal cord. Philosophical Transactions of the royal society, 361, 1635-1646.
Cerini, V. (2006). Facilitação Neuromuscular Proprioceptiva na Lesão Medular com Ênfase na Força e Amplitude de Movimento Ativa de Tronco: Estudo de Caso.Cascavel.
Colombo, G., Joerg, M., Schreier, R., & Dietz, V. (2000). Treadmill training of paraplegic patients using a robotic orthosis. Journal of Rehabilitation research and development, 37 (6), 693-700.
Colombo, G., Wirz, M., & Dietz, V. (2001). Driven gait orthosis for improvement of locomotor training in paraplegic patients. Spinal Cord, 39, 252-255.
Delissa, J. A., & Graus, B. M. (2002). Tratado de Medicina de Reabilitação: Príncipios e prática. (3ª ed., vol. 2). São Paulo. Editora: Manole.
Dietz, V., & Harkema, S. (2004). Locomotor activity in spinal cord-injured persons. Journal of Applied
Physiology, 96, 1954-1960.
Faria, F. (2006). Lesões vértebro-medulares – A perspectiva da reabilitação. Revista Portuguesa de Pneumologia, XII (1), 45-53.
Field-Fote, E. D., & Tepavac, D. (2002). Improved Intralimb Coordination in People With Incomplete Spinal Cord Injury Following Training With Body Weight Support and Electrical Stimulation. Physical Therapy, 82 (7), 707-715.
Hornby, T., Zemon, D., & Campbell, D. (2005). Robotic-Assisted, body-weight- Supported Treadmill Training in Individuals Following Motor Incomplete Spinal Cord Injury.Physical Therapy. 85 (1), 52-66.
Girgis, J., Merrett, D., Kirkland, S., Metz, G. A. S., Verge, V., & Fouad, K. (2007). Reaching training in rats with spinal cord injury promotes plasticity and task specific recovery. Brain, 130, 2993-3003.
Graaff, K. (2003). Anatomia Humana. (6ª ed). São Paulo: Editota Manole.
21
Lucareli, P. (2009). Treino de Marcha em Pacientes com Suporte de Peso em Pacientes com Lesão Medular. São Paulo.Tese apresentada à Faculdade de Medicina da Universidade de São Paulo para obtenção do título de Doutor em Ciências.
Lünenburger, L., Colombo, G., Riener, R., et al. (2004). Biofeedback in gait training with the robotic orthosis Lokomat.
O’Sullivan, S. B., & Schmitz, T. J. (2004). Fisioterapia Avaliação e Tratamento. (4ªed.). São Paulo: Editora Manole.
Parker, D. (2006). Complexities and uncertainties of neuronal network function. University of Cambridge.
Philos Trans R Soc Lond B Biol Sci.
Polia, A., Castro, D. (2007). A Lesão Medular e suas sequelas, de acordo com o modelo de ocupação humana. Cadernos de Terapia Ocupacional da UFSCar. 2007, vol. 15 nº 1. Goiás.
Richardson, E., Richards, S., Boyer, B. (2007). Spinal Cord Injury. Comprehensive Book of clinical health psychology: Chapter 10.
Rossignol, S. (2001). Locomotion and Its Recovery after Spinal Injury. Neurobiology, 10 (6), 708-716.
Santos, P. A. L. C. (2009). Efeito do sistema de marcha suspensa robotizada (Lokomat) na marcha de pacientes com lesão vertebro-medular incompleta. Porto:P. Santos. Dissertação de Mestrado apresentada à Faculdade de Desporto daUniversidade do Porto.
Seeley, R. R., Stephens, T. D., & Tate, P. (1997). Anatomia e Fisiologia (3ª ed.). Lisboa: Lusodidacta.
Simões, C. (2008). Paraplegia: Prevalência, Etiologia e Processo de Reabilitação. Tese de Mestrado em Educação Área de Especialização em Educação para a Saúde apresentada à Universidade do Minho.
Siscão, M., Pereira, C., Arnal, R., et al. (2007). Trauma Raquimedular: Caracterização em um Hospital Público. Arq Ciênc Saúde 2007 jul-set; 14(3): 145-7.
Souza, A., Nascimento, L., Silva, C., et al. (2006). Estudo experimental das alterações vasculares da medula espinhal induzidas por traumatismo mecânico e compressão do canal vertebral. Ribeirão Preto –
USP.
Thomas, S., Gorassini, A. (2005). Increases in Spinal Cord Tract by Treadmill Training After Incomplete Spinal Cord Injury. J Neurophysical 94; 284-2855. The American Physiological Society.
Tortora, G. (2000). Corpo Humano Fundamentos de Anatomia e Fisiologia. (4ªed). São Paulo: Editora Artmed.
Winchester, P., McColl, R., Querry, R., Foreman, N., Mosby, J., Tansey, K. et al. (2005). Changes in Supraspinal Activation Patterns following Robotic Locomotor Therapy in Motor Incomplete Spinal Cord Injury. Neurorehabil Neural Repair, 19, 313-324.