Geometric algorithms for cavity detection on protein surfaces
138
0
0
Texto
(2)(3)
(4)(5)
(6)(7)
(8)(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
(24)(25)
(26)
(27)
(28)
(29)
(30)
(31)
(32)(33)
(34)(35)
(36)
(37)
(38)
(39)
(40)
Imagem
+7
![Figure 8: Detecting cavities through POCKET (see [LB92]): (a) in the x -direction; (b) in the y -direction](https://thumb-eu.123doks.com/thumbv2/123dok_br/18663185.913314/52.892.89.817.125.329/figure-detecting-cavities-pocket-lb-x-direction-direction.webp)
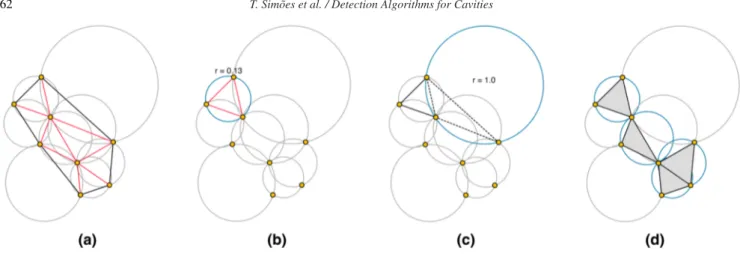
![Figure 17: GP method [XB07]: (a) C α atom-based structure (grey points); (b) convex hull (in orange) and Delaunay triangulation (in dark grey); (c) first carving procedure that removes simplexes whose edges are longer than 30.0 ˚ A (black dashed line segme](https://thumb-eu.123doks.com/thumbv2/123dok_br/18663185.913314/66.892.89.820.115.282/figure-structure-delaunay-triangulation-carving-procedure-removes-simplexes.webp)
Documentos relacionados