CENTRO DE CIˆ
ENCIAS EXATAS
DEPARTAMENTO DE MATEM ´
ATICA
PROGRAMA DE P ´
OS-GRADUAC
¸ ˜
AO EM MATEM ´
ATICA
(Mestrado)HUGO MURILO RODRIGUES
Curvaturas em Grupos de Lie com M´etricas Invariantes `
a
Esquerda
UNIVERSIDADE ESTADUAL DE MARING ´A CENTRO DE CI ˆENCIAS EXATAS DEPARTAMENTO DE MATEM ´ATICA
PROGRAMA DE P ´OS-GRADUAC¸ ˜AO EM MATEM ´ATICA
Curvaturas em Grupos de Lie
com M´
etricas Invariantes `
a
Esquerda
Hugo Murilo Rodrigues
Disserta¸c˜ao apresentada ao Programa de P´os-Gradua¸c˜ao em Matem´atica do Departamento de Ma-tem´atica, Centro de Ciˆencias Exatas da Universidade Estadual de Maring´a, como requisito para obten¸c˜ao do t´ıtulo de Mestre em Matem´atica.
´
Area de concentra¸c˜ao: Geometria e Topologia.
Orientador: Prof. Dr. Ryuichi Fukuoka.
Resumo
O presente trabalho tem como objetivo estudar as rela¸c˜oes entre as curvaturas de m´etricas invariantes `a esquerda, as ´algebras de Lie e a topologia dos grupos de Lie em quest˜ao, fornecendo assim exemplos de curvaturas de diversas caracter´ısticas em variedades Riemannianas completas.
LetG a Lie group with a left invariant metric.
The aim of this work is to study relationship between curvature, topology and Lie algebra of G. Furthermore this study will provide examples of curvatures with different characteristics in complete Riemannian manifolds.
SUM ´
ARIO
Introdu¸c˜ao 7
1 Geometria Riemanniana 9
1.1 Variedades diferenci´aveis . . . 9
1.2 Variedades Riemannianas . . . 13
2 Grupos de Lie 19 2.1 Grupos topol´ogicos . . . 19
2.2 Grupos e ´algebras de Lie . . . 21
2.3 Exemplos . . . 28
3 Curvaturas em Grupos de Lie com M´etricas Invariantes `a Esquerda 35 3.1 Curvatura seccional . . . 36
3.2 Curvatura de Ricci . . . 41
3.3 Curvatura escalar . . . 44
3.4 O caso tridimensional . . . 45
3.5 C´alculos . . . 51
3.6 Grupos de Lie unimodulares e n˜ao-unimodulares . . . 59
3.7 M´etricas bi-invariantes . . . 70
Ao se estudar uma classe de objetos matem´aticas, ´e natural e essencial que se tenha em m˜aos exemplos capazes de intuir as dire¸c˜oes a serem seguidas durante o estudo. Desta forma, o presente trabalho tem como objetivo principal a constru¸c˜ao de exemplos onde se estuda as rela¸c˜oes entre a curvatura de variedades Riemannianas completas e suas propriedades geom´etricas e topol´ogicas.
As variedades Riemannianas abordadas neste estudo ser˜ao em especial os grupos de Lie com m´etricas invariantes `a esquerda. Neste caso, seG´e um grupo de Lie com uma m´etrica invariante `a esquerda e Γ ´e um subgrupo discreto, a variedade quociente G/Γ com m´etrica induzida possui mesmas caracter´ısticas acerca de suas curvaturas e tal processo fornece facilmente novos exemplos de propriedades conhecidas.
8
GEOMETRIA RIEMANNIANA
1.1
Variedades diferenci´
aveis
As demonstra¸c˜oes desta se¸c˜ao podem ser encontradas em [2].
Defini¸c˜ao 1.1.1. Uma variedade diferenci´avel de dimens˜ao n ´e um conjunto M e uma fam´ılia de aplica¸c˜oes bi-un´ıvocas xα :Uα⊂Rn −→M de abertos Uα de Rn em
M tais que:
1. S
αxα(Uα) =M.
2. Para todo par α, β com xα(Uα) ∩xβ(Uβ) =W 6=∅, os conjuntos x−α1(W) e
x−β1(W) s˜ao abertos em Rn e as aplica¸c˜oes x−1
β ◦x−α1 s˜ao diferenci´aveis.
3. A fam´ılia {(Uα, xα)} ´e m´axima relativamente as condi¸c˜oes (1) e (2).
O par (Uα, xα) com p ∈ xα(Uα) ´e chamado uma parametriza¸c˜ao ou sistema de
coordenadas em p∈M e xα(Uα) ´e ent˜ao chamado uma vizinhan¸ca coordenada em
p. A fam´ılia {(Uα, xα)} satisfazendo (1) e (2) ser´a chamada estrutura diferenci´avel
emM. Note que uma estrutura diferenci´avel induz de forma natural uma topologia em M.
Defini¸c˜ao 1.1.2. Sejam Mn
1 e M2m variedades diferenci´aveis. Uma aplica¸c˜ao φ : Mn
1 −→ M2m ´e diferenci´avel em p ∈ M1n se dada uma parametriza¸c˜ao y : V ⊂
Rm −→ Mm
1.1 Variedades diferenci´aveis 10
φ(x(U)) ⊂ y(V) e a aplica¸c˜ao y−1 ◦φ ◦x : U ⊂ Rn −→ Rm ´e diferenci´avel em
x−1(p).
Devido a exigˆencia (2) em 1.1.1 a diferenciabilidade de uma aplica¸c˜ao em um ponto n˜ao depende da parametriza¸c˜ao adotada.
An´alogo `a superf´ıcies regulares, no estudo de variedades diferenci´aveis um con-ceito indispens´avel ´e o de espa¸co tangente. Contudo nas superf´ıcies o concon-ceito de espa¸co tangente n˜ao ´e definido de forma intr´ınseca, dependendo assim do espa¸co ao qual a superf´ıcie pertence. Por´em variedades como vimos pela sua defini¸c˜ao n˜ao s˜ao necessariamente subconjuntos de um espa¸co Euclidiano e desta forma necessitam de uma defini¸c˜ao independente como segue.
Defini¸c˜ao 1.1.3. Seja M uma variedade diferenci´avel. Uma aplica¸c˜ao diferenci´avel
α: (−ǫ, ǫ)−→M ´e chamada uma curva diferenci´avel em M. Suponha queα(0) = p
e seja D o conjunto das fun¸c˜oes definidas em M diferenci´aveis em p. O vetor tangente `a curva α em t= 0 ´e a fun¸c˜ao α′(0) :D −→ R dada por
α′(0)f = d(f◦α) dt
onde f ∈ D.
Um vetor tangente emp´e o vetor tangente em t= 0 de alguma curvaα: (−ǫ, ǫ)−→
M com α(0) = p. O conjunto dos vetores tangentes a M em p ser´a indicado por
TpM.
Para cadap∈M,TpM com as opera¸c˜oes usuais de soma e produto por escalar ´e
um espa¸co vetorial de dimens˜aon que chamamos espa¸co tangente emp. Dada uma parametriza¸c˜aoxobt´em-se uma base associadan( ∂
∂x1)0, ...,(
∂ ∂xn)0
o
para TpM, onde
( ∂
∂xi)0 ´e o vetor tangente emp `a curva coordenada xi 7−→x(0, ...,0, xi,0, ...,0).
Proposi¸c˜ao 1.1.4. SejamM1 e M2 variedades diferenci´aveis e seja φ:M1 −→M2
uma aplica¸c˜ao diferenci´avel. Para cadap∈M1 e cada v ∈TpM1, escolha uma curva
diferenci´avel α : (−ǫ, ǫ) −→ M1 com α(0) = p e α′(0) = v. Pondo β = φ ◦α a
aplica¸c˜ao dφp : TpM1 :−→ Tφ(p)M2 dada por dφp(v) = β′(0) ´e uma aplica¸c˜ao linear
que n˜ao depende da escolha deα.
Sem muito esfor¸co se mostra que a composi¸c˜ao de aplica¸c˜oes diferenci´aveis ´e ainda diferenci´avel e al´em disso vale nessas condi¸c˜oes a regra da cadeia.
Defini¸c˜ao 1.1.6. Sejam M1 e M2 variedades diferenci´aveis. Uma aplica¸c˜ao φ : M1 −→ M2 ´e um difeomorfismo se ´e uma bije¸c˜ao com inversa φ−1 diferenci´avel.
Nos mesmos moldes,φ´e um difeomorfismo local emp∈M1 se existirem vizinhan¸cas U de p e V de φ(p), tais que φ:U −→V seja um difeomorfismo.
Defini¸c˜ao 1.1.7. Sejam Mn e Nm variedades diferenci´aveis. Uma aplica¸c˜ao
dife-renci´avel φ : M −→ N ´e uma imers˜ao se dφp : TpM −→ Tφ(p)N ´e injetora para
todo p∈M. Se, al´em disso, φ ´e um homeomorfismo sobre φ(M)⊂N, onde φ(M)
possui a topologia induzida por N, diz-se que φ ´e um mergulho. Caso M ⊂ N e a inclus˜ao seja um mergulho dizemos ent˜ao que M ´e uma subvariedade de N.
Para uma boa defini¸c˜ao de certos objetos em uma variedade diferenci´avel ´e ne-cess´ario que nesta esteja definida uma orienta¸c˜ao. A defini¸c˜ao de variedade dife-renci´avel orientada pode ser dada como segue.
Defini¸c˜ao 1.1.8. Seja M uma variedade diferenci´avel. Diz-se que M ´e orient´avel, se M admite uma estrutura diferenci´avel {(Uα, xα)} tal que para todo par α, β com
xα(Uα) ∩xβ(Uβ) =W 6=∅ a diferencial (Jacobiana) da mudan¸ca de coordenadas
xβ◦x−α1 possui determinante positivo. Caso contrario, diz-se queM ´e n˜ao orient´avel.
Nas linhas seguintes ser´a mencionado uma maneira de construir variedades di-ferenci´aveis localmente difeomorfas a uma variedade dada a partir da a¸c˜ao de um grupo. Tal procedimento fornece uma ferramente poderosa para o estudo de quest˜oes locais, uma vez que localmente, a nova variedade e a variedade dada s˜ao indis-tingu´ıveis do nosso ponto de vista.
Diz-se que um grupo G age em uma variedade diferenci´avel M se existe uma aplica¸c˜ao φ:G×M −→M tal que:
1. Para cada g ∈ G, a aplica¸c˜ao φg : M −→ M dada por φg(p) = φ(g, p) onde
p∈M ´e um difeomorfismo e se e´e o elemento neutro de G, ent˜ao φe =Id.
2. Se g1, g2 ∈G, ent˜ao φg1g2 =φg1 ◦φg2.
1.1 Variedades diferenci´aveis 12
Diz-se que uma a¸c˜ao ´e propriamente descontinua se todo p ∈ M possui uma vizinhan¸ca U ⊂ M tal que U ∩ g(U) = ∅ para todo g 6= e. Se G age sobre M, ent˜ao p1 ≡ p2 se, e s´o se, p2 = gp1 para algum g ∈ G determina uma rela¸c˜ao de equivalˆencia em M e M/G ser´a o espa¸co quociente de M por tal rela¸c˜ao. Agora considere π:M −→M/Ga proje¸c˜ao dada por π(p) = Gp.
Teorema 1.1.9. Seja M ´e uma variedade diferenci´avel e G×M 7−→ M ´e uma a¸c˜ao propriamente descontinua. Ent˜ao M/G possui uma estrutura diferenci´avel de modo que π :M −→M/G ´e um difeomorfismo local.
Dada uma variedade diferenci´avelM, a cole¸c˜ao dos espa¸cos vetoriais que a cada ponto da variedade associa seu espa¸co tangente possui uma estrutura de variedade diferenci´avel constru´ıda de forma natural a partir da estrutura de M, `a esta nova variedade se d´a o nome defibrado tangente de M e denotaremos T M.
Defini¸c˜ao 1.1.10. Um campo de vetores X em uma variedade diferenci´avel M ´e uma correspondˆencia que a acada ponto p∈M associa um vetor X(p)∈TpM. Em
termos de aplica¸c˜ao, X ´e uma aplica¸c˜ao de M em T M. O campo ´e diferenci´avel se a aplica¸c˜ao X :M −→T M ´e diferenci´avel.
Dados dois campos diferenci´aveis de vetores X e Y em uma variedade, existe um e s´o um campo diferenci´avel de vetores Z tal que Z = XY −Y X. Note que apesar de frequentemente XY e Y X n˜ao conduzirem a campos diferenci´aveis de vetores pois envolvem derivadas de orden maior, o operador [X, Y] = XY −Y X ´e um campo diferenci´avel de vetores e determina uma opera¸c˜ao entre campos de vetores [·,·] chamada o colchete.
Proposi¸c˜ao 1.1.11. Se X, Y e Z s˜ao campos diferenci´aveis de vetores em M,
a, b∈R e f, g fun¸c˜oes diferenci´aveis, ent˜ao:
1. (Anti-comutatividade)
[X, Y] =−[Y, X]. 2. (Linearidade)
3. (Identidade de Jacobi)
[[X, Y], Z] + [[Y, Z], X] + [[Z, X], Y] = 0. 4. [f X, gX] =f g[X, Y] +f X(g)Y −gY(f)X.
Relacionado a problemas de valores iniciais em equa¸c˜oes diferenciais teremos o pr´oximo resultado. O conceito de fluxo em uma variedade ´e muito importante e ganha ainda mais importˆancia a partir da escolha dos campo de vetores e das pro-priedades da variedade. Exemplos desses s˜ao os fluxos geod´esicos de uma variedade Riemanniana e o fluxo dos campos invariantes em um grupo de Lie, como veremos nas pr´oximas se¸c˜oes.
Teorema 1.1.12. SejaX um campo diferenci´avel de vetores em uma variedadeM e
p∈M. Ent˜ao existem uma vizinhan¸caU ⊂M dep, um intervalo(−δ, δ)com δ >0
e uma aplica¸c˜ao diferenci´avelϕ : (−δ, δ)×U −→M, tais que a curva α(t) = ϕ(t, q)
ondet ∈(−δ, δ) e q ∈U ´e a ´unica curva que satisfaz ∂ϕ∂t =X(ϕ(t, q)) e ϕ(0, q) = q.
Uma curva α : (−δ, δ) −→ M que satisfaz as condi¸c˜oes α′(t) = X(α(t)) e
α(0) = q ´e chamada a trajet´oria do campo X que passa por q para t = 0. A aplica¸c˜ao ϕ : (−δ, δ) ×U −→ M depende diferenciavelmente de t, da condi¸c˜ao inicialq eϕt:U −→M ´e chamado ofluxo local de X.
1.2
Variedades Riemannianas
Defini¸c˜ao 1.2.1. Uma m´etrica Riemanniana em uma variedade diferenci´avel M ´e uma correspondˆencia que associa a cada pontopde M um produto internoh·,·ip em
TpM que varia diferenciavelmente em M.
Variar diferenciavelmente como na defini¸c˜ao acima pode ser melhor compreen-dido com auxilio de um sistema de coordenadas locais x : U ⊂ Rn −→ M em
torno de p. Neste sistema de coordenadas, definagij(p) =
D
∂ ∂xi(p),
∂ ∂xj(p)
E
p. Exigir
que o produto interno varie diferenciavelmente emM significa pedir que as fun¸c˜oes gij dependam diferenciavelmente de p. As fun¸c˜oes gij s˜ao chamadas express˜oes da
m´etrica Riemanniana no sistema de coordenadas.
Defini¸c˜ao 1.2.2. Uma variedade Riemanniana ´e uma variedade diferenci´avel
1.2 Variedades Riemannianas 14
Defini¸c˜ao 1.2.3. Sejam M e N variedades Riemannianas. Um difeomorfismo f : M −→N ´e chamado uma isometria se
hu, vip =hdfp(u), dfp(v)if(p)
para todop∈M e u, v ∈TpM.
Defini¸c˜ao 1.2.4. Nos moldes da defini¸c˜ao anterior, f ´e uma isometria local em
p ∈ M se existe uma vizinhan¸ca U ⊂ M de p tal que f : U −→ f(U) ´e uma isometria.
Duas variedades Riemannianas M eN s˜ao ditas localmente isom´etricas se para cada p∈M existir uma isometria local em p.
Dada uma variedade Riemanniana orientada existe uma maneira de atribuir volume a certas regi˜oes de M. Para isso seja p ∈ M e x : U ⊂ Rn −→ M uma
parametriza¸c˜ao compat´ıvel com a orienta¸c˜ao deM. Considere uma base ortonormal positivaB ={e1, ..., en}em TpM e escreva Xi(p) = ∂x∂
i(p) na baseB como Xi(p) =
P
ijaijej, ent˜ao det(aij) =
p
det(gij)(p). Agora se R ⊂ M ´e um conjunto aberto
e conexo cujo fecho ´e compacto e suponha que R ⊂ x(U) possuindo fronteira de medida nula em Rn, definimos
V ol(R) = Z
x−1(R)
q
det(gij)(x1, ..., xn)dx1...dxn.
Sey :V ⊂Rn −→M ´e outra parametriza¸c˜ao positiva em torno dep, ent˜ao o
Ja-cobiano da mudan¸ca de coordenadas possui determinante positivo e utilizando troca de vari´aveis nas integrais em Rn se mostra sem dificuldades que nessas condi¸c˜oes a
defini¸c˜ao do volume deR n˜ao depende do sistema de coordenadas. Para uma regi˜ao compactaRn˜ao necessariamente contida em uma vizinhan¸ca coordenada, tome uma parti¸c˜ao da unidade {ϕα} subordinada a cobertura finita de R determinada pelas
vizinhan¸cas coordenadas xα(Uα) e defina
V ol(R) =X
α
Z
x−1(R)
ϕα
q det(gα
ij)(x1, ..., xn)dx1...dxn.
Indicaremos χ(M) o conjunto dos campos de vetores de classe C∞ em M e por
Defini¸c˜ao 1.2.5. Uma conex˜ao afim ∇ em uma variedade diferenci´avel M ´e uma aplica¸c˜ao,
∇:χ(M)×χ(M)−→χ(M)
que se indica por (X, Y)→ ∇∇ XY e que satisfaz as seguintes propriedades:
1. ∇f X+gYZ =f∇XZ+g∇YZ,
2. ∇X(Y +Z) = ∇XY +∇XZ,
3. ∇X(f Y) =f∇XY +X(f)Y,
onde X, Y, Z ∈χ(M) e f, g∈D(M).
Proposi¸c˜ao 1.2.6. Seja M uma variedade diferenci´avel com uma conex˜ao afim ∇. Ent˜ao existe uma ´unica correspondˆencia que associa a um campo vetorialV ao longo de uma curva diferenci´avelc:I −→M um outro campo vetorial DV
dt ao longo de c,
denominado derivada covariante de V ao longo de c, tal que:
1. D(Vdt+W) = DV dt +
DW dt .
2. D(dtf V) = dfdtV +fDV dt .
3. Se V ´e induzido por um campo de vetores Y ∈ χ(M), isto ´e, V(t) = Y(c(t)), ent˜ao DV
dt =∇dcdtY.
Defini¸c˜ao 1.2.7. Seja M uma variedade diferenci´avel com uma conex˜ao afim ∇. Um campo V ao longo de uma curva c : I −→ M ´e chamado de paralelo quando
DV
dt = 0 para todo t∈I.
Proposi¸c˜ao 1.2.8. Seja M uma variedade diferenci´avel com uma conex˜ao afim ∇. Seja c : I −→ M uma curva diferenci´avel em M e V0 um vetor tangente a M em
c(t0), t0 ∈I. Ent˜ao existe um ´unico campo de vetores paralelos V ao longo de c, tal queV(t0) =V0 (V(t) ´e chamado o transporte paralelo de V(t0) ao longo de c).
1.2 Variedades Riemannianas 16
Defini¸c˜ao 1.2.9. SejaM uma variedade Riemanniana com uma conex˜ao afim∇. A conex˜ao ´e dita compat´ıvel com a m´etrica h·,·i, quando para toda curva diferenci´avel
c e quaisquer pares de campos de vetores paralelos P e P′ ao longo de c tivermos hP, P′i=cte.
Apresentamos agora seguidamente duas caracteriza¸c˜oes de conex˜oes compat´ıveis com a m´etrica, a segunda segue imediatamente da primeira e ser´a frequentemente utilizada ao longo dos estudos.
Proposi¸c˜ao 1.2.10. Seja M uma variedade Riemanniana. Uma conex˜ao ∇ em M
´e compat´ıvel com a m´etrica se, e s´o se, para todo par V e W de campos de vetores ao longo da curva diferenci´avelc:I −→M tem-se
d
dthV, Wi=
DV dt , W
+
V,DW dt
.
Corol´ario 1.2.11. Uma conex˜ao∇em uma variedade RiemannianaM ´e compat´ıvel com a m´etrica se, e s´o se
XhY, Zi=h∇XY, Zi+hY,∇XZi.
Defini¸c˜ao 1.2.12. Uma conex˜ao afim ∇ em uma variedade diferenci´avel M ´e dita sim´etrica quando
∇XY − ∇YX = [X, Y]
para todoX, Y ∈χ(M).
Teorema 1.2.13. Dado uma variedade RiemannianaM, existe uma ´unica conex˜ao afim ∇ em M satisfazendo as condi¸c˜oes
1. ∇ ´e sim´etrica.
2. ∇ ´e compat´ıvel com a m´etrica Riemanniana.
A conex˜ao do teorema acima ´e chamadaconex˜ao Riemanniana deM.
Defini¸c˜ao 1.2.14. Uma curva parametrizada γ : I −→ M ´e uma geod´esica em
t0 ∈I se D dt(
dγ
dt) = 0 para t0. Caso γ seja geod´esica para todo t ∈I, dizemos que γ
´e uma geod´esica.
Lema 1.2.15. Existe um ´unico campo G em T M cujas trajet´orias s˜ao da forma
Defini¸c˜ao 1.2.16. O campo G acima ´e chamado campo geod´esico em T M e seu fluxo, fluxo geod´esico de T M.
Aplicando o Teorema 1.1.12 ao campo geod´esico G no ponto (p,0) ∈ T M, ob-temos para cadap ∈M um aberto U ⊂ T M, onde (p,0)∈ U, um n´umero δ > 0 e uma aplica¸c˜aoC∞,ϕ : (−δ, δ)×U −→T M tais queϕ
(q,v)(t) ´e a ´unica trajet´oria de Gque satisfaz a condi¸c˜ao inicial ϕ(q,v)(0) = (q, v) para cada (q, v)∈U. Escolhendo
U como U = {(q, v)∈T M;q ∈V, v∈TqM com |v|< ǫ}, onde V ⊂ π(U) ´e uma
vizinhan¸ca dep∈M com π a proje¸c˜ao de T M sobreM e pondoγ =π◦ϕ obtemos a seguinte proposi¸c˜ao.
Proposi¸c˜ao 1.2.17. Dadop∈M, existem uma vizinhan¸caV dep, n´umeros δ >0,
ǫ >0 e uma aplica¸c˜ao C∞ γ : (−δ, δ)×U −→M (U como acima) tais que a curva
γ(q,v)(t), t ∈ (−δ, δ), ´e a ´unica geod´esica de M que no instante t = 0 passa por q
com velocidade v, para cada q∈V e cada v ∈TqM com |v|< ǫ.
Devido a homogeneidade (veja [2] pg.72) podemos supor que as geod´esicas este-jam definidas no intervalo aberto (−2,2). A escolha deste aberto ´e justificada pelas considera¸c˜oes que se seguem.
Seja U ⊂T M um aberto como na proposi¸c˜ao acima com δ = 2. Desta forma a aplica¸c˜ao exp:U −→M dada por
exp(q, v) =γ(1, q, v) = γ(|v|, q, v
|v|)
onde (q, v)∈U, ´e chamada a aplica¸c˜ao exponencial em U. A aplica¸c˜ao exponencial ´e diferenci´avel e expq : Bǫ(0) ⊂ TqM −→ M dada por expq(v) = exp(q, v) ´e a
restri¸c˜ao de exp a um aberto de TqM. Geometricamente, expq(v) ´e o ponto obtido
ao percorrer |v| a partir deq sobre a geod´esica que passa porq com velocidade v
|v|.
Proposi¸c˜ao 1.2.18. Dado q∈M, existe umǫ >0 tal queexpq :Bǫ(0) ⊂TqM −→
M ´e um difeomorfismo de Bǫ(0) sobre um aberto de M.
Impl´ıcito na proposi¸c˜ao acima est´a contido uma rela¸c˜ao important´ıssima que nos d´a a express˜ao da diferencial da aplica¸c˜aoexpq em 0∈TqM. Na realidade para
todov ∈Bǫ(0), d(expq)0(v) = v e isso ´e o bastante para a veracidade da proposi¸c˜ao
1.2 Variedades Riemannianas 18
Defini¸c˜ao 1.2.19. A curvatura Rde uma variedade RiemannianaM ´e uma corres-pondˆencia que associa a cada parX, Y ∈χ(M)uma aplica¸c˜ao R(X, Y) :χ(M)−→
χ(M) dada por
R(X, Y)Z =∇Y∇XZ− ∇X∇YZ+∇[X,Y]Z
onde Z ∈χ(M) e ∇ ´e a conex˜ao Riemanniana de M.
Proposi¸c˜ao 1.2.20. Seja R a curvatura de uma variedade riemanniana, ent˜ao:
1. R ´e bilinear em χ(M)×χ(M), isto ´e,
R(f X1+gX2, Y1) = f R(X1, Y1) +gR(X2, Y1),
R(X1, f Y1+gY2) =f R(X1, Y1) +gR(X1, Y2),
onde f, g∈D(M) e X1, X2, Y1, Y2 ∈χ(M).
2. Para todo par X, Y ∈χ(M), o operador curvaturaR(X, Y) :χ(M)−→χ(M)
´e linear, isto ´e,
R(X, Y)(Z+W) =R(X, Y)Z+R(X, Y)W,
R(X, Y)f Z =f R(X, Y)Z,
onde f ∈D(M) e Z, W ∈χ(M).
Proposi¸c˜ao 1.2.21. A curvatura R satisfaz a identidade de Bianchi, isto ´e,
R(X, Y)Z+R(Y, Z)X+R(Z, X)Y = 0.
De agora em diante utilizaremos por conveniˆencia a nota¸c˜ao RXY(Z) para
GRUPOS DE LIE
Este cap´ıtulo tem como objetivo fornecer conceitos b´asicos e essenciais `a cons-tru¸c˜ao do cap´ıtulo 3. Neste, assim como fez Sophus Lie inicialmente em 1870, utilizaremos tamb´em as ´algebras de Lie associada aos grupos de Lie para explorar suas propriedades.
O emprego das ´algebras de Lie no estudo dos grupos de Lie se tornou o caminho mais frequente, muito por essas serem estruturas mais simples uma vez que o espa¸co estudado ´e linear.
As demonstra¸c˜oes deste cap´ıtulo podem ser encontradas em [9].
2.1
Grupos topol´
ogicos
Defini¸c˜ao 2.1.1. Um grupo topol´ogico G ´e um grupo (alg´ebrico) cujo conjunto subjacente est´a munido de uma topologia e que,
1. O produto p :G×G−→ G, p(g, h) = gh, ´e uma aplica¸c˜ao cont´ınua, quando se considera em G×G a topologia produto.
2. A aplica¸c˜ao i:G−→G, i(g) =g−1, ´e cont´ınua.
Cada elementog ∈G define, de forma natural as seguintes aplica¸c˜oes:
2.1 Grupos topol´ogicos 20
Conjuga¸c˜ao: Cg :G−→G, Cg(h) =ghg−1. Decorre imediatamente da
continui-dade depque tais aplica¸c˜oes s˜ao continuas. Na verdade uma observa¸c˜ao mais atenta ´e suficiente para notarmos que se tratam de homeomorfismos de G. A proposi¸c˜ao abaixo ´e uma consequˆencia da continuidade das transla¸c˜oes.
Proposi¸c˜ao 2.1.2. Sejam G e H grupos topol´ogicos e φ :G−→H um homomor-fismo (de grupos). Ent˜ao,φ ´e cont´ınuo se, e s´o se,φ ´e cont´ınuo no elemento neutro
e∈G.
Defini¸c˜ao 2.1.3. Um subgrupo H ⊂Gcom a topologia do subespa¸co ´e denominado de subgrupo topol´ogico de G.
Obviamente para que tal defini¸c˜ao tenha sentido ´e preciso notar que se p:G×
G−→ G ´e o produto em G, ent˜ao pH =p|H : H ×H −→ H ´e o produto em H e
´e continuo com a topologia do subespa¸co em H×H que coincide com a topologia produto em H×H. Considera¸c˜oes an´alogas devem ser feitas para iH.
Proposi¸c˜ao 2.1.4. Seja H ⊂G um subgrupo e suponha que H◦ 6=∅. Ent˜ao, H ´e
aberto.
Proposi¸c˜ao 2.1.5. Suponha que H seja um subgrupo aberto de G. Ent˜ao, H ´e fechado.
Este ´ultimo fato garante que subgrupos abertos deG s˜ao na realidade uni˜oes de componentes conexas deGe em particular, seG´e conexo, deve portanto ser o ´unico de seus subgrupos abertos. Os resultados que se seguem ter˜ao aplica¸c˜oes no estudo de grupos de Lie, principalmente pelo fato destes serem localmente conexos.
Proposi¸c˜ao 2.1.6. A componente conexa do elemento neutro em G, G0, ´e um sub-grupo fechado e normal de G. Qualquer outra componente conexa ´e uma classe lateral gG0 = G0g. Reciprocamente, toda classe lateral gG0 = G0g ´e uma compo-nente conexa de G.
Proposi¸c˜ao 2.1.7. Suponha que G seja localmente conexo. Ent˜ao, G0 ´e um sub-grupo aberto.
Proposi¸c˜ao 2.1.8. Suponha queG seja conexo. Ent˜ao para qualquer vizinhan¸ca do elemento neutroU, temos G=S
n≥1U
Quando estamos em posse de um grupo localmente compacto ´e poss´ıvel definir sobre tal uma medida de Haar µ, ou seja, uma medida sobre a σ-´algebra dos con-juntos de Borel de G, que ´e invariante por transla¸c˜oes `a esquerda ou `a direita no grupo. Para a constru¸c˜ao de tal medida fica referenciado [9] cap´ıtulo 3.
2.2
Grupos e ´
algebras de Lie
Defini¸c˜ao 2.2.1. Um grupo de Lie ´e um grupo cujo conjunto subjacente possui uma
estrutura de variedade diferenci´avel, de tal forma que a aplica¸c˜ao produto
p: (g, h)∈G×G7−→gh∈G
seja diferenci´avel.
Decorre imediatamente da defini¸c˜ao acima e da natureza das transla¸c˜oes, que es-tas s˜ao difeomorfismo deGem G. Aqui, bem como em todo trabalho, consideramos diferenci´avel como de classe C∞. Decorre da defini¸c˜ao acima e do uso do Teorema
da fun¸c˜ao impl´ıcita o seguinte resultado.
Proposi¸c˜ao 2.2.2. Em um grupo de Lie G a aplica¸c˜ao i:g ∈G7→g−1 ∈G ´e um
difeomorfismo. A diferencial de i ´e dada por
dig =−(dLg−1)e◦(dRg−1)g
em particular, (di)e=−id.
Associado a um grupo de Lie existe uma estrutura alg´ebrica vetorial que desem-penha um papel important´ıssimo em seu estudo. Tal estrutura ´e chamada ´algebra de Lie.
Defini¸c˜ao 2.2.3. Uma ´algebra de Lie ´e um espa¸co vetorial ❣ munido de uma opera¸c˜ao binaria [·,·] :❣×❣−→❣ denominada colchete de Lie satisfazendo:
1. O colchete [·,·]´e bilinear.
2. Anti-sim´etrico, isto ´e, [X, Y] =−[Y, X].
2.2 Grupos e ´algebras de Lie 22
Enunciaremos agora algumas defini¸c˜oes acerca de ´algebras de Lie que ser˜ao fre-quentemente utilizadas em nosso estudo.
Defini¸c˜ao 2.2.4. Uma ´alegra de Lie ❣ ´e dita comutativa se [X, Y] = 0 para todo
X, Y ∈❣
Defini¸c˜ao 2.2.5. Uma sub´algebra de Lie❤⊂❣´e um subespa¸co vetorial de ❣fechado para o colchete.
Defini¸c˜ao 2.2.6. Um subespa¸co ✉ de uma ´algebra de Lie❣ ´e um ideal, se para todo
X ∈✉ e todo Y ∈❣, [X, Y]∈✉.
Defini¸c˜ao 2.2.7. A s´erie central descendentede uma ´algebra de Lie ❣ ´e dada por
❣=❣1 ⊃❣2 = [❣,❣]⊃ · · ·=❣k+1 =
❣,❣k
· ·· .
Defini¸c˜ao 2.2.8. A ´algebra de Lie ❣ ´e nilpotente se sua s´erie central descendente se estabiliza, isto ´e, se ❣k={0} para algum k ≥0.
Defini¸c˜ao 2.2.9. Seja ❣ uma ´algebra de Lie, sua s´erie derivada ´e a sequˆencia de ideais
❣(0) =❣⊃❣(1) = [❣,❣]⊃❣(2) =
❣(1),❣(1)
⊃ · · · ⊃❣(k)=
❣(k−1),❣(k−1)
⊃ · · · .
Defini¸c˜ao 2.2.10. Uma ´algebra de Lie ❣ ´e dita sol´uvel se ❣(k) = {0} para algum k≥0.
Defini¸c˜ao 2.2.11. Uma ´algebra de Lie ❣ ´e dita simples se n˜ao admite ideais que n˜ao os triviais ({0} e ❣).
Defini¸c˜ao 2.2.12. Uma ´algebra de Lie ❣ ´e dita semi-simples se pode ser escrita como soma direta (de espa¸cos vetoriais) de ´algebras de Lie simples.
Defini¸c˜ao 2.2.13. Seja G um grupo de Lie. Um campo de vetores X em G ´e dito
Invariante `a esquerda: se para todo g, h∈G, d(Lg)h(X(h)) =X(gh).
Invariante `a direita: se para todo g, h∈G, d(Rg)h(X(h)) =X(hg).
Decorre diretamente da defini¸c˜ao acima que o campo definido a partir da condi¸c˜ao X(g) = d(Lg)e(X(e)) para cada g ∈ G ´e invariante a esquerda. Os campos
inva-riantes `a direita s˜ao obtidos analogamente. Essa propriedade mostra que o espa¸co tangenteTeGdetermina todos os campos invariantes emG, portanto podemos a
par-tir daqui nos referirmos a um campo invariante, previamente estabelecido `a esquerda ou `a direita, como um elemento de TeG. Dado X ∈ TeG, a nota¸c˜ao Xd indicar´a
o campo invariante `a direita tal que Xd(e) = X, ou seja, Xd(g) = d(R
g)e(X) e
analogamente paraXe.
Lema 2.2.14. SejamXe e Ye campos invariantes em um grupo de Lie G. Ent˜ao, o
colchete de campos diferenci´aveis de vetores [Xe, Ye] =XeYe−YeXe ´e invariante
`a esquerda. A mesma afirma¸c˜ao vale para campos invariantes `a direita.
O Lema acima permite definir a ´algebra de Lie deG. Existe mais de uma maneira de definir a ´algebra de Lie ❣ de um grupo de Lie G, contudo todas conduzem a ´algebras de Lie isomorfas. Utilizaremos aqui a defini¸c˜ao mais conveniente.
Defini¸c˜ao 2.2.15. A ´algebra de Lie ❣ de um grupo de Lie G ´e o espa¸co vetorial
TeG munido da opera¸c˜ao colchete dada por
[X, Y] = [Xe, Ye] (e)
onde X, Y ∈TeG.
Em outras palavras, o colchete em TeG conduz um par de vetores X, Y ∈ TeG
(ou campos invariantes `a esquerda Xe e Ye em G) ao representante em T eG do
campo invariante `a esquerda dado por [Xe, Ye] =XeYe−XeYe.
2.2 Grupos e ´algebras de Lie 24
exp. Para entender sua existˆencia, seja X um campo invariante a esquerda, denote Xt seu fluxo local. A invariˆancia de X, promove a seguinte propriedade:
Sejam g, h ∈ G com h ∈ domXt e α(t) = gXt(h). Note que o dom´ınio de α ´e
um intervalo deRcontendo o zero, tal que α(0) =gh. Agora, pela regra da cadeia,
α′(t) = d(E
g)Xt(h)(X(Xt(h))) e pela invariˆancia de X segue que α
′(t) = X(α(t)).
Portantoα´e uma curva que para t= 0 passa em ghcom velocidadeX(gh). Logoα ´e solu¸c˜ao para o problema de valor inicial ∂g∂t =X(g) comg(0) =gh, ou seja,α(t) = Xt(gh) e Xt(gh) = gXt(h). Em particular se h = e temos Xt(g) = gXt(e), isto ´e,
as solu¸c˜oes para o P.V.I anterior s˜ao na realidade transla¸c˜oes a esquerda da solu¸c˜ao com valor inicial α(0, e) = 0. Para campos invariantes a direita, analogamente se mostra que Yt(h)g =Yt(hg).
O fato de as trajet´orias serem obtidas umas das outras via transla¸c˜oes acarreta que devem possuir todas o mesmo intervalo de dom´ınio. Estas considera¸c˜oes nos levam ao seguinte resultado.
Proposi¸c˜ao 2.2.16. Um campo invariante a direita ou a esquerda ´e completo.
Outro resultado que segue imediatamente do feito acima ´e que seX ´e invariante a esquerda ent˜ao:
Xt+s(e) =Xt(Xs(e)) =Xs(e)Xt(e) =Xt(e)Xs(e),
enquanto seY ´e invariante `a direita,
Yt+s(e) =Yt(Ys(e)) = Yt(e)Ys(e) =Ys(e)Yt(e)
e assim obtemos que
Xt+s(e)Xt(e)−1 =Xs(e) = Xt+s−t(e) =Xt+s(e)X−t(e),
ou seja, X−t(e) = Xt(e)−1 e analogamente se mostra que Y−t(e) = Yt(e)−1. O
que nos leva a concluir que se X ´e invariante `a esquerda e Y invariante `a direita, ent˜ao {Xt(e);t∈R} e{Yt(e);t ∈R}s˜ao subgrupos de Gdenominados subgrupos a
1-parˆametro deG.
Proposi¸c˜ao 2.2.17. Sejam X e Y campos invariantes `a esquerda e `a direita res-pectivamente, tais que X(e) =Y(e). Ent˜ao suas trajet´orias Xt(e)e Yt(e)coincidem
parat ∈R.
Defini¸c˜ao 2.2.18. Seja X ∈ TeG. Ent˜ao expX = X1d(e) = X1e(e) ´e a aplica¸c˜ao
exponencial de ❣ em G.
No caso particular (contudo muito frequente) de um grupo de LieGde matrizes, verifica-se que seX ∈❣, ent˜aoexp(X) =P
n≥0
Xn
n! , ou seja, a aplica¸c˜ao exponencial coincide com a j´a conhecida exponencial de matrizes (veja [9] pg.98).
Observa¸c˜ao 2.2.19. Se a ∈ R e X ´e um campo diferenci´avel de vetores, ent˜ao as
trajet´oriasX eaX possuem a mesma imagem e seus fluxos satisfazem (aX)t =Xat.
Portanto as trajet´orias de campos Xd e Xe que passam pelo elemento neutro s˜ao
dadas por
Xtd(e) =X e
t(e) =exptX.
Assimexp(t+s)X =Xt+s(e) = Xt(e)Xs(e) = exptXexpsX ´e um homomorfismo
de R em G.
Proposi¸c˜ao 2.2.20. A aplica¸c˜aoexp:❣−→G´e diferenci´avel e al´em dissod(exp)0(X) = X para todo X ∈❣.
A proposi¸c˜ao acima prepara o uso do Teorema da aplica¸c˜ao inversa, nos garan-tindo a existˆencia de vizinhan¸casU ⊂❣e V ⊂G de 0∈❣ ee∈G respectivamente, de forma que exp :U −→V seja um difeomorfismo. Perceba que este fato, devido a proposi¸c˜ao 2.1.8, possui imediata influˆencia sobre grupos de Lie conexos.
Lema 2.2.21. SejamGeHgrupos de Lie com ´algebras de Lie❣e❤respectivamente. Seja φ :G −→ H um homomorfismo diferenci´avel e tome X ∈ ❣. Ent˜ao para todo
g ∈G vale
dφg(Xd(g)) =Yd(φ(g)),
dφg(Xe(g)) =Ye(φ(g)),
onde Y =dφe(X).
2.2 Grupos e ´algebras de Lie 26
Proposi¸c˜ao 2.2.22. Sejam G e H grupos de Lie com ´algebras de Lie ❣ e ❤ respec-tivamente. Se φ:G−→H ´e um homomorfismo diferenci´avel e X ∈❣, ent˜ao
φ(expX) =exp(dφe(X)).
O automorfismo conjuga¸c˜ao Cg(h) = ghg−1 induz naturalmente um
homomor-fismo de G no grupo linear geral Gl(❣) dado por Ad(g) = d(Lg)g−1 ◦d(Rg−1)e. Tal
homomorfismo ´e diferenci´avel e al´em disse vale o pr´oximo resultado.
Proposi¸c˜ao 2.2.23. Seja G um grupo de Lie com ´algebra de Lie ∈ ❣. Ent˜ao
d(Ad)e(X) = [X,·] para todo X ∈❣.
Defini¸c˜ao 2.2.24. Sejam❣ e ❤ ´algebras de Lie. Um homomorfismo (de ´algebras de Lie) de ❣ em ❤ ´e uma transforma¸c˜ao linear T :❣−→❤, tal que
T([X, Y]) = [T(X), T(y)],
ou seja,T preserva o colchete.
Defini¸c˜ao 2.2.25. Seja ❣ uma ´algebra de Lie. Sua representa¸c˜ao adjunta ´e a aplica¸c˜ao ad:❣:−→❣❧✭❣✮ definida por
ad(X)(Y) = [X, Y].
Acima ❣❧✭❣✮ ´e a ´algebra linear geral dadas pelas transforma¸c˜oes lineares de ❣ em ❣e o comutador de matrizes.
Devido a bilinaridade do colchete e a identidade de Jacobi, ad ´e um homomor-fismo de ´algebras de Lie (na verdade ´e uma representa¸c˜ao de❣, (veja [9] pg.110). Com a nota¸c˜ao da defini¸c˜ao acima o resultado da proposi¸c˜ao 2.2.23 se tornad(Ad)e(X) =
ad(X). Aplicando este ´ultimo fato `a proposi¸c˜ao 2.2.22 obtemos.
Corol´ario 2.2.26. Seja G um grupo de Lie, com ´algebra de Lie ❣. Ent˜ao
Ad(expX) =exp(ad(X))
O resultado abaixo ´e conhecido como terceiro teorema de Lie.
Teorema 2.2.28. Se G ´e um grupo de Lie conexo com ´algebra de Lie ❣, ent˜ao o seu recobrimento universal G˜ admite uma estrutura de grupo de Lie cuja ´algebra de Lie ´e ❣.
Teorema 2.2.29. Seja ❣ uma ´algebra de Lie real de dimens˜ao finita. Ent˜ao,
1. Existe um ´unico (a menos de isomorfismo) grupo de Lie conexo e simplesmente
conexo G(˜ ❣) com ´algebra de Lie ❣.
2. Se G ´e um grupo de Lie conexo com ´algebra de Lie ❣, ent˜ao G ´e isomorfo a
˜
G(❣)/Γ, onde Γ ⊂ G(˜ ❣) ´e um subgrupo discreto contido no centro de G(˜ ❣). Al´em disso, Γ´e isomorfo ao grupo fundamental π1(G).
A unicidade do item 1 ´e garantida pelo principio da monodromia (veja [9] pg.155). Dado um grupo de LieG com ´algebra de Lie❣e um ideal ✉⊂❣, existe um ´unico subgrupo de Lie conexo U ⊂ G com ´algebra de Lie ✉. Al´em disso se G ´e conexo e ❣ se decomp˜oe como a soma direta ❣ = ❛1⊕ · · · ⊕❛n de ideais de ❣, ent˜ao G se
decomp˜oe como o produto cartesianoG=A1× · · · ×An de subgrupos normais Ai,
tais subgrupos s˜ao gerados pelas sub´algebras ❛i (veja [9] se¸c˜ao 6.2). Ainda, se G ´e
simplesmente conexo, cadaAi deve ser simplesmente conexo.
Um grupo de Lie pode obviamente ser considerado uma variedade Riemanniana, bastando para isso que possua uma m´etrica Riemanniana. Desta forma, podemos nos perguntar quais destas deixam invariantes os automorfismos transla¸c˜oes, neste contexto temos a defini¸c˜ao abaixo.
Defini¸c˜ao 2.2.30. Uma m´etrica Riemanniana em um grupo de Lie G´e dita inva-riante `a esquerda se
hX, Yig =hd(Lh)gX, d(Lh)gYiLh(g)
para todoh, g ∈G e X, Y ∈TgG.
2.3 Exemplos 28
2.3
Exemplos
Nesta ´ultima se¸c˜ao preliminar daremos alguns exemplos de grupos de Lie, bem como suas ´algebras de Lie e bases apropriadas para tais ´algebras, preparando-os para aplica¸c˜oes no pr´oximo cap´ıtulo.
Exemplo 2.3.1. O grupo de Lie SL(2,R) ´e chamado de grupo linear especial e
consiste no grupo das matrizes reais bi-dimensionais com determinante 1. Note que
tal grupo n˜ao ´e limitado em M2(R), portanto n˜ao ´e compacto.
Quanto a sua ´algebra de Lie, se X ∈ sl(2,R), ent˜ao det(exp(tX)) = 1 para
todo t ∈ R, ou seja, det(exp(X)) = etr(X) = 1 e portanto tr(X) = 0 sendo desta
forma uma condi¸c˜ao necess´aria e suficiente para X ∈ sl(2,R). Assim sl(2,R) =
{X∈M2(R);tr(X) = 0}.
Mostremos agora quesl(2,R)´e simples. De fato, tomemos inicialmente para tal
´algebra a base,
e1 =
−1 0
0 1
, e2 =
0 −1
−1 0 , e3 =
0 −1
1 0
Nesta base temos [e1, e2] = −2e3, [e2, e3] = 2e1 e [e3, e1] = 2e2. Ent˜ao perceba que tal estrutura garante que todo ideal que admitir um elemento da base{e1, e2, e3} ´e na realidade sl(2,R).
Sejauum ideal desl(2,R),v =ae1+be2+ce3 ∈ue suponha sem perda de
genera-lidade quea6= 0. Ent˜ao[v, e1] = 2be3+2ce2. Caso b,c ou ambos sejam zero, obtemos um elemento b´asico emu. Caso ambos difiram de zero, ent˜ao [2be3+ 2ce2, e3] = 4ce1
e e1 ∈u. Logo sl(2,R) n˜ao admite ideais n˜ao triviais.
Exemplo 2.3.2. O grupo de LieSU(2)´e chamado grupo especial unit´ario e consiste no grupo das matrizes complexas unit´arias de determinante 1. As matrizes deSU(2)
podem ser escritas na forma,
a b
−¯b ¯a ,
Se a=x1+x2i e b =x3+x4i teremos,
A=
a b
−¯b ¯a =
x1 +x2i x3+x4i
−x3 +x4i x1−x2i
com x1, x2, x3, x4 ∈ R. A condi¸c˜ao sobre o determinante garante que det(A) =
x2
1+x22+x23+x24 = 1, ou seja, o grupo de LieSU(2) ´e homeomorfo a S3, portanto
´e compacto, conexo e simplesmente conexo.
Quanto a sua ´algebra de Lie, note que se X ∈ su(2), ent˜ao exp(tX) ´e unit´aria para todo t ∈ R, ou seja, exp(tX)∗ =exp(tX)−1 =exp(−tX). Como exp(tX)∗ =
exp(tX∗) obtemos exp(tX∗) = exp(−tX). numa dire¸c˜ao vemos que se X∗ =
−X, ent˜ao a igualdade exp(tX∗) = exp(−tX) est´a satisfeita. Noutra dire¸c˜ao, se
exp(tX∗) = exp(−tX) para todo t ∈ R, derivando em t = 0 temos X∗ = −X, ou
seja, as matrizes em su(2) satisfazem necessariamente X∗ = −X. Al´em disso, a
restri¸c˜ao sobre o determinante exige tamb´em quedet(exp(tX) = 1 para todo t∈R.
Desta forma det(exp(tx)) = etr(tX) = 1. Em especial para t= 1 obtemos tr(X) = 0.
Logo su(2) ={X ∈M2(C);X∗ =−X e tr(X) = 0}.
Uma base para su(2) sobre R ´e
e1 =
0 −i
−i 1 , e2 =
0 1
−1 0 , e3 =
i 0 0 −i
onde [e1, e2] = 2e3, [e2, e3] = 2e1 e [e3, e1] = 2e2. Analogamente ao exemplo 2.3.1 se mostra que tal ´algebra de Lie ´e simples.
Exemplo 2.3.3. O grupo SO(3) ´e chamado de grupo ortogonal especial tridimen-sional e consiste no grupo das matrizes ortogonais cujo determinante ´e 1. Como
SO(3) ⊂S2 ×S2×S2, conclu´ımos que tal grupo ´e limitado no espa¸co das matrizes
tridimensionais. Note tamb´em que toda sequˆencia de matrizes ortogonais
conver-gente, converge a uma matriz ortogonal. Al´em disso, decorre da continuidade da
aplica¸c˜ao determinante que se tais matrizes possuem determinante 1, ent˜ao
conver-gem a uma matriz de determinante 1, ou seja, tal grupo ´e tamb´em fechado, logo
compacto.
Quanto a ´algebra de Lie so(3) de SO(3), se X ∈ SO(3), ent˜ao exp(tX)T =
exp(tX)−1 =exp(−tX), como exp(tX)T =exp(tXT) para todo t ∈R, derivando e
2.3 Exemplos 30
satisfaz a igualdade exp(tX)T = exp(−tX) para todo t ∈ R. Como det(expA)) =
etr(A) vale sempre, devemos neste caso ter det(expX) = 1 e podemos concluir que X ∈so(3) se, e s´o se, XT =−X.
Mostraremos agora que a ´algebra de Lie so(3) ´e simples. De fato, note que uma base para o espa¸co das matrizes tridimensionais anti-sim´etricas ´e dada por
e1 =
0 0 1
0 0 0
−1 0 0
, e2 =
0 −1 0
1 0 0
0 0 0
, e3 =
0 0 0
0 0 −1
0 1 0
,
onde [e1, e2] = e3, [e2, e3] = e1 e [e3, e1] = e2. Portanto a simplicidade de so(3)
decorre do mesmo argumento utilizado em 2.3.1.
Exemplo 2.3.4. O grupo de Heisenberg que denotaremos H, consiste no grupo de matrizes da forma
1 a b 0 1 c 0 0 1
,
onde a, b, c ∈ R. Perceba que H ´e homeomorfo a R3, portanto ´e conexo, mas n˜ao
compacto.
Quanto a sua ´algebra de Lie, note que se α(t) ´e uma curva diferenci´avel em H, tal que α(0) =id, deve necessariamente possuir α′(0) da forma,
0 a′ b′
0 0 c′
0 0 0
,
ondea′, b′, c′ ∈R. Reciprocamente, para ver que toda matrizX desta forma pertence
a ´algebra de Lie❤deH, basta notar queexp(tX)possui sempre a forma das matrizes de H. Logo
❤=
0 a′ b′
0 0 c′
0 0 0
;a, b, c∈R
.
portanto sol´uveis. De fato, perceba que [❤,❤] =
0 0 a 0 0 0 0 0 0
;a∈R
e [❤,[❤,❤]] ={0}. Logo a s´erie central descendente de ❤ ´e
❤⊃[❤,❤]⊃ {0}.
Por fim, uma base para tal ´algebra de Lie ´e
e1 =
0 0 1 0 0 0 0 0 0
, e2 =
0 1 0 0 0 0 0 0 0
, e3 =
0 0 0 0 0 1 0 0 0
.
Com essa base temos, [e1, e2] = 0, [e2, e3] =e1 e [e3, e1] = 0.
Exemplo 2.3.5. E(2) ´e chamado o grupo Euclidiano e consiste no grupo das iso-metrias deR2, tal grupo ´e isomorfo ao grupo das matrizes tridimensionais da forma
W x1 x2
0 0 1
,
onde W ´e uma matriz ortogonal e x1, x2 ∈R.
Quanto a sua ´algebra de Lie e(2), uma condi¸c˜ao necess´aria para X pertencer `a e(2) ´e possuir a ´ultima linha nula, uma vez que se exp(tX) ´e um subgrupo a 1-parˆametro, ent˜ao
d
dtexp(tX)|t=0 = Y x ′ 1 x′ 2
0 0 0
.
Perceberemos mais adiante que Y ∈ so(2). Reciprocamente, um calculo breve nos mostra que
Y x ′ 1 x′ 2
0 0 0
n =
Yn Yn−1 x′ 1 x′ 2
0 0 0
2.3 Exemplos 32
portanto se X ´e da forma acima, devemos ter
exptX =
exptY y1 y2
0 0 1
,
onde [y1, y2]T =P∞
n=1
tnYn−1
n! ([x
′
1, x′2]
T
).
Agora exp(tY) ´e uma matriz ortogonal se, e s´o se, Y ´e da forma YT = −Y.
Logo e(2) =
Y y1 y2
0 0 0
;YT =−Y, y1, y2 ∈R
.
Mostraremos agora que e(2) ´e sol´uvel. Para isso inicialmente detalharemos um pouco mais as matrizes dessa ´algebra de Lie. Primeiramente note que as matrizes
bidimensionais e ortogonais em uma vizinhan¸ca de e podem ser escritas como ma-trizes de rota¸c˜ao, portanto uma curva passando pela identidade de E(2) em t = 0
possui a forma
cos(α(t)) sen(α(t)) β(t)
−sen(α(t)) cos(α(t)) γ(t)
0 0 1
,
ondeα, β eγ s˜ao curvas diferenci´aveis emRcontendo a origem com α(0) =β(0) =
γ(0) = 0. Derivando em t = 0 vemos que uma matriz arbitraria de e(2) pode ser escrita da forma
0 a b
−a 0 c
0 0 0
, portanto
[e(2),e(2)] =
0 0 x 0 0 y 0 0 0
;x, y ∈R
e1 =
0 0 0 0 0 1 0 0 0
, e2 =
0 0 1 0 0 0 0 0 0
, e3 =
0 1 0
−1 0 0
0 0 0
e nesta base temos, [e1, e2] = 0, [e2, e3] =e1 e [e3, e1] =e2.
Exemplo 2.3.6. O grupo de Lie E(1,1) consiste no grupo dos movimentos r´ıgidos do espa¸co bidimensional de Minkowski. Em tal espa¸co as m´etricas possuem
assina-tura(+,−). Desta forma uma transforma¸c˜ao linearT preserva tal m´etrica se, e s´o se, T BTT =B onde B denota a matriz da forma bilinear associada `a m´etrica. Se
denotarmos a matriz de T por
x1 x2 x3 x4
, isso se traduz na seguinte equa¸c˜ao,
x1 x2 x3 x4
−1 0
0 1 x1 x2 x3 x4 =
−1 0
0 1
e se obt´em, x2
1−x22 = 1, −x23 +x42 = 1, −x1x3+x2x4 = 0. Encontrando t ∈R, tal
que x1 = cosh(t), x2 = senh(t) e s ∈ R, tal que x3 =senh(s), x4 =cosh(s) (aqui
se descarta as solu¸c˜oes x1 =−cosh(t) e x4 =−cosh(s), pois ´e poss´ıvel mostrar que
E(1,1) ´e conexo e tais solu¸c˜oes n˜ao conduzem a componente conexa da identidade que coincide comE(1,1)), teremosx2x4−x1x3 =senh(t)cosh(s)−cosh(t)senh(s) = senh(t−s) = 0, ou seja, t=s e T possui matriz da forma,
cosh(t) senh(t) senh(t) cosh(t) .
Transla¸c˜oes evidentemente preservam m´etricas de Minkowski, assim movimentos
r´ıgidos neste espa¸co se identificam com matrizes da forma,
cosh(t) senh(t) x senh(t) cosh(t) y
0 0 1
,
onde x, y ∈ R. Novamente uma curva passando pela identidade em t = 0 ´e da
forma,
cosh(α(t)) senh(α(t) β(t) senh(α(t) cosh(α(t) γ(t)
0 0 1
2.3 Exemplos 34
com α, β e γ curvas diferenci´aveis em R contendo a origem, de forma que α(0) =
β(0) = γ(0) = 0. Logo vetores na ´algebra de Lie e(1,1)possuem a forma,
0 a b a 0 c 0 0 0
com a, b, c ∈ R. Reciprocamente, se X ´e desta forma, ent˜ao potˆencias para um
´ındice n impar possuem a forma,
0 an an−1b an 0 an−1c
0 0 0
e para n par a forma,
an 0 an−1b 0 an an−1c
0 0 0
portanto a matriz exp(X) possui nas entradas a11, a12, a21, a22 as s´eries a11=a22 = P∞
n=0 x
2n
2n! e a12 = a21 = P∞
n=0 x
2n+1
(2n+1)! que correspondem as s´eries de potˆencias das
fun¸c˜oes cosh e senh respectivamente. Logo
e(1,1) =
T ∈M3(R);T =
0 a b a 0 c 0 0 0
CURVATURAS EM GRUPOS DE LIE COM M´
ETRICAS
INVARIANTES `
A ESQUERDA
Neste cap´ıtulo faremos o emprego da teoria previamente estabelecida afim de estudar propriedades das curvaturas em grupos de Lie quando neste fixamos uma m´etrica invariante `a esquerda. As curvaturas seccionais, de Ricci e escalar ser˜ao os objetos principais das trˆes primeiras se¸c˜oes, um complemento deste estudo pode ser encontrado nos trabalhos de Wallach [11], Azencott e Wilson [1] e Heintze [3].
Os grupos de Lie tridimensionais, devido a sua relativa simplicidade, ganhar˜ao uma se¸c˜ao pr´opria onde os estudaremos dividindo-os em duas classes, os unimodu-lares e os n˜ao-unimoduunimodu-lares. A unimodularidade desempenha um papel importante na compreens˜ao das propriedades geom´etricas de um grupo de Lie e por esse motivo dedicamos tamb´em uma se¸c˜ao ao estudo de grupos de lie unimodulares de dimens˜ao arbitr´aria.
A ´ultima se¸c˜ao tratar´a de m´etricas bi-invariantes. Como poderemos ver, neste caso o estudo das curvaturas se tornar´a mais simples.
3.1 Curvatura seccional 36
3.1
Curvatura seccional
SejaGum grupo de Lien-dimensional e❣a ´algebra de Lie associada, consistindo de todos os campos diferenci´aveis de vetores invariantes `a esquerda em G. Escolha uma base e1, ..., en para o espa¸co vetorial ❣ e defina uma m´etrica exigindo que tal
base seja ortonormal, ou seja, de maneira que hei, eji = δij. Tal m´etrica pode ser
estendida a uma m´etrica Riemanniana invariante `a esquerda emG pondo,
hu, vix =h(dLx−1)x(u),(dLx−1)x(v)i ∀x∈G e u, v ∈TxG,
ondeLx denota a transla¸c˜ao `a esquerda porxem G. Reciprocamente, toda m´etrica
invariante `a esquerda em G pode ser deduzida de uma m´etrica (produto interno) em ❣. Esta rela¸c˜ao garante que as m´etricas Riemannianas invariantes `a esquerda emGest˜ao identificadas com os produtos internos de ❣e como os produtos internos de um espa¸co vetorial real n-dimensional est˜ao bem representados pelas matrizes sim´etricas, definidas positivas com entradas reais, conclu´ımos que dado um grupo de LieGn-dimensional, existe uma fam´ılia n2
+n
2 -dimensional de m´etricas Riemannianas invariantes `a esquerda em G. Escolhendo uma m´etrica invariante `a esquerda em G, as transla¸c˜oes `a esquerda s˜ao isometrias que ligam quaisquer dois pontos dados, bastando para isso notar que sex, y ∈G, ent˜ao Lyx−1 ´e um difeomorfismo que pelo
exposto acima preserva a m´etrica invariante a esquerda comLyx−1(x) =y. Portanto
G ´e uma variedade Riemanniana homogˆenea. Segue deste fato que todo grupo de Lie com uma m´etrica invariante `a esquerda ´e completo. Com efeito, escolha um ǫ > 0 de maneira que expe : Bǫ(0) ⊂ TeG → G aplique a bola fechada Bǫ(0) na
bola fechadaBǫ(e)⊂Gdifeomorficamente. ComoTeG´e homeomorfo aRn,Bǫ(0) ´e
compacta eBǫ(e) ´e compacta. Agora sendo G homogˆeneo, toda Bǫ(x) onde x∈G,
´e compacta. Nestas condi¸c˜oes toda sequˆencia de Cauchy admite uma subsequˆencia convergente e portanto converge.
Sejam X e Y espa¸cos vetoriais, Uma aplica¸c˜ao f : X ×X −→ Y ´e chamada bi-quadr´atica se satisfaz as equa¸c˜oes,
f(x+y, z) +f(x−y, z) = 2f(x, z) + 2f(y, z),
A curvatura de uma variedade Riemanniana em um ponto pode ser mais facil-mente descrita pela fun¸c˜ao bi-quadr´atica,
k(x, y) =hRxy(x), yi
com x e y tomados no espa¸co tangente de um ponto dado. Uma fun¸c˜ao k(x, y) ´e uma fun¸c˜ao curvatura para alguma m´etrica Riemanniana se, e s´o se, el´a ´e sim´etrica, bi-quadr´atica como fun¸c˜ao de x e y e se anula quando x = y. A cole¸c˜ao de todas as fun¸c˜oes bi-quadr´aticas, sim´etricas comk(x, x)≡0 forma um espa¸co vetorial real de dimens˜ao n2(n122−1). Se u e v s˜ao vetores unit´arios e ortogonais ( ou mais em geral, se o determinante hu, ui hv, vi − hu, vi2 = 1), ent˜ao o n´umero real k(u, v) ´e chamado curvatura seccional do plano gerado por u e v. Geometricamente, k(u, v) ´e a curvatura Gaussiana em p da superf´ıcie varrida pelas geod´esicas tendo como vetores tangentes as combina¸c˜oes lineares deu e v.
Sejae1, ..., en um referencial ortonormal invariante `a esquerda deG. A estrutura
da ´algebra de Lie pode ser descrita porn×n×nconstantes de estrutura αijk onde,
[ei, ej] =
X
k
αijkek,
ou equivalentemente,
αijk =h[ei, ej], eki.
Note queαijk =h[ei, ej], eki=− h[ej, ei], eki=−αjik e as constantes de estrutura
s˜ao anti-sim´etricas com rela¸c˜ao aos dois primeiros ´ındices.
Lema 3.1.1. Com as constantes de estrutura αijk acima, a curvatura seccional
k(e1, e2) ´e dada pela f´ormula,
k(e1, e2) = X
k
(1
2α12k(−α12k+α2k1+αk12)− 1
4(α12k−α2k1+αk12)(α12k+α2k1−αk12)
−αk11αk22).
3.1 Curvatura seccional 38
A express˜ao do lemma 3.1.1, mostra que a curvatura pode ser completamente calculada a partir de informa¸c˜oes da ´algebra de Lie e sua m´etrica. Al´em disso a curvatura depende continuamente das constantes de estrutura αijk e zera sempre
que elas zeram.
Lembremos que a adjunta L∗ de uma transforma¸c˜ao linear L ´e definida pela
f´ormula,
hLx, yi=− hx, L∗yi.
A transforma¸c˜ao L ´e anti-adjunta se L∗=−L. Para qualquer elemento x na
´algebra de Lie❣, a transforma¸c˜ao linear
y7→[x, y]
de❣ em ❣´e chamada ad(x).
Considere agora Gcom uma m´etrica invariante `a esquerda e u∈g.
Lema 3.1.2. Se a transforma¸c˜ao ad(u) ´e anti-adjunta, ent˜ao
k(u, v)≥0
para todov, onde a igualdade vale se, e s´o se, u´e ortogonal a [v,❣]. Demonstra¸c˜ao. Como hRuv(u),vi
hu,uihv,vi−hu,vi2 ´e invariante por mudan¸ca de bases do plano
gerado poruev, ( veja [2] pg.104) podemos assumir sem perda de generalidade queu evs˜ao ortonormais. Escolha uma base ortonormale1, ..., ende❣come1 =uee2 =v.
Como por hip´otesead(e1) ´e anti-adjunta, ent˜ao had(e1)ej, eki=− hej, ad(e1)eki, ou
seja, h[e1, ej], eki = − h[e1, ek], eji e α1jk = −α1kj. Utilizando este fato na f´ormula
do Lema 3.1.1, obtemos que
k(e1, e2) = X
k
1 4α
2
k21 ≥0.
Mostremos agora o caso da igualdade. Suponha que k(e1, e2) = P
k
1 4α
2
k21 = 0. Ent˜ao αk21 = 0 para k = 1, ..., n, he1,[e2, ek]i = 0 e segue da bi-linearidade do
colchete e da m´etrica que e1⊥[e2,❣]. Reciprocamente, se he1,[e2,❣]i = 0, ent˜ao
Relembremos que o centro da ´algebra de Lie ´e o ideal ❩✭❣✮={u∈❣;ad(u)≡0}
de❣.
Corol´ario 3.1.3. Se u ∈ ❩✭❣✮, ent˜ao para qualquer m´etrica invariante `a esquerda temos que k(u, v)≥0 para todo v ∈❣.
Demonstra¸c˜ao. Segue do Lema 3.1.2 e de observar que ad(u)≡0, portantoad(u) ´e anti-adjunta seja qual for a m´etrica invariante `a esquerda escolhida.
Um grupo de Lie pode possuir uma m´etrica invariante n˜ao somente `a esquerda, mas tamb´em a direita, ou seja, invariante por transla¸c˜oes `a esquerda e `a direita. Um fato b´asico sobre m´etricas bi-invariantes pode ser resumido como segue.
Lema 3.1.4. Uma m´etrica invariante `a esquerda em um grupo de Lie conexo ´e
tamb´em invariante `a direita se, e s´o se, ad(x) ´e anti-adjunta ∀x∈❣. Um grupo de Lie conexo admite uma m´etrica bi-invariante se, e s´o se, ´e isomorfo ao produto
cartesiano de um grupo compacto e um grupo comutativo.
Este fato ser´a provado na se¸c˜ao 7.
Corol´ario 3.1.5. Todo grupo de Lie compacto admite uma m´etrica invariante `a
esquerda (na verdade bi-invariante) de maneira que todas as curvaturas seccionais
satisfa¸cam K ≥0.
Demonstra¸c˜ao. Se G ´e compacto, ent˜ao ´e isomorfo `a G× {e} onde G ´e compacto e {e} ´e comutativo. Pelo Lema anterior a componente conexa da identidade de G possui uma m´etrica bi-invariante e ad(x) ´e anti-adjunta ∀x∈❣. Logo pelo Lema 3.1.2 temos queK ≥0.
Veremos na se¸c˜ao 7 que a curvatura seccional associada a uma m´etrica bi-invariante pode ser calculada pela f´ormula explicita
k(u, v) = 1
4h[u, v],[u, v]i. Isto fornece uma prova alternativa para k(u, v)≥0.
3.1 Curvatura seccional 40
Teorema de Wallach. O grupo SU(2), consistindo das matrizes unit´arias 2×2 de determinante 1, ´e o ´unico grupo de Lie simplesmente conexo que admite uma m´etrica invariante `a esquerda de curvatura seccional estritamente positiva.
Para uma prova veja [11].
Uma variedade Riemanniana ´e dita flat seK ≡0. Segue do Lema 3.1.1 que se a ´algebra de Lie ´e comutativa ent˜ao o grupo de Lie ´e flat.
Teorema 3.1.6. Um grupo de Lie com uma m´etrica invariante `a esquerda ´e flat se,
e s´o se, a ´algebra de Lie associada se expressa como a soma direta ortogonal ❜⊕✉, onde ❜ ´e uma sub-´algebra comutativa, ✉ ´e um ideal comutativo e a transforma¸c˜ao linear ad(x) ´e anti-adjunta ∀x∈❜.
Demonstra¸c˜ao: Ser´a apresentada na se¸c˜ao 7.
Dizemos que um grupo de Lie ´e unimodular se a medida de Haar invariante `a esquerda ´e tamb´em invariante `a direita. Mais detalhes desta defini¸c˜ao ser˜ao dados na se¸c˜ao 6.
Teorema 3.1.7. Se um grupo de Lie G conexo possui uma m´etrica invariante `a esquerda cujas curvaturas seccionais satisfazem K ≤ 0, ent˜ao G ´e sol´uvel. Se G ´e unimodular, ent˜ao qualquer tal m´etrica comK ≤0´e na realidade flat.
Demonstra¸c˜ao. A demonstra¸c˜ao segue de [1], se¸c˜oes 3.4.5, 5.2, 3.6.5 e 3.6.6.
Exemplo Especial. Suponha que a ´algebra de Lie ❣ possui a propriedade de que o colchete de Lie [x, y] ´e sempre igual a combina¸c˜ao linear de x e y. Assuma que dim(❣)≥2, ent˜ao
[x, y] =l(x)y−l(y)x,
onde l´e uma aplica¸c˜ao linear bem definida de ❣em R.
Escolhendo qualquer m´etrica Riemanniana invariante `a esquerda, as curvaturas seccionais s˜ao constantes
Assim no caso n˜ao-comutativol6= 0, toda poss´ıvel m´etrica em❣possui curvatura seccional constante negativa.
Demonstra¸c˜ao: A prova ser´a dada na se¸c˜ao 5.
O exemplo acima tem realmente um car´ater especial, uma vez que atendidas as exigˆencias acerca da ´algebra de Lie ([x, y] = l(x)y−l(y)x para todo x, y ∈ ❣), o grupo de Lie conexo e simplesmente conexo com ´algebra ❣ ´e isom´etrico ao espa¸co hiperb´olico n-dimensional.
3.2
Curvatura de Ricci
Importantes informa¸c˜oes a cerca da curvatura Riemanniana em um ponto podem ser descritas pela forma quadr´atica de Ricci, r(x). A forma quadr´atica de Ricci ´e uma fun¸c˜ao quadr´atica definida no fibrado tangente da variedade em valores reais pela f´ormula
r(x) =X
i
k(x, ei) =
X
i
hRxei(x), eii
, onde e1, ..., en ´e qualquer base ortonormal para o espa¸co tangente. Se u ´e um
vetor unit´ario, ent˜ao r(u) ´e chamado a curvatura de Ricci na dire¸c˜ao de u. Note que a curvatura de Ricci consiste emn−1 vezes a m´edia das curvaturas seccionais determinadas pelos planos formados pela dire¸c˜ao escolhida e os vetores da base.
Para c´alculos pode ser mais conveniente utilizar a transforma¸c˜ao,
ˆ
r(x) =X
i
Reix(ei)
que esta relacionada com a forma quadr´aticar pela identidade
r(x) = hr(x), xˆ i.
Os autovalores de ˆr s˜ao chamados de curvaturas de Ricci principais. A escolha de uma base ortonormal de autovetores e1, ..., en de ˆr (tal base existe, pois ˆr ´e
auto-adjunta) diagonalizar,
r(ξ1e1+...+ξnen) =
X
ij
hξiˆr(ei), ξjeji=
X
i
ξi2hˆr(ei), eii=
X
i
3.2 Curvatura de Ricci 42
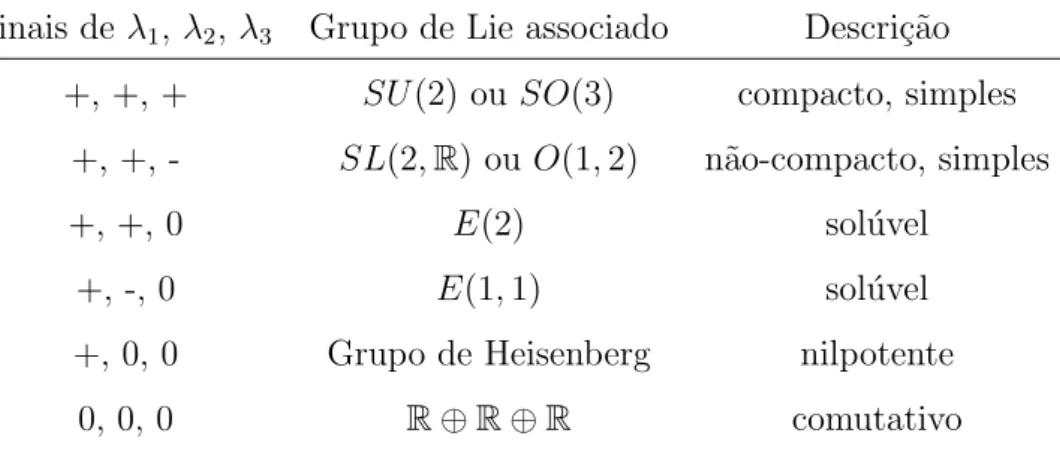
Em particular os n´umeros r(ei) podem ser identificados com as curvaturas de
Ricci principais e a cole¸c˜ao dos sinais {sgn(r(e1)), ..., sgn(r(en))} pode ser
identifi-cado com a assinatura da forma quadr´aticar.
Lema 3.2.1. Se a transforma¸c˜ao ad(u) ´e anti-adjunta, ent˜ao r(u) ≥ 0, onde a igualdade vale se, e s´o se, u´e ortogonal ao ideal [❣,❣].
Demonstra¸c˜ao. O Lema 3.1.2 diz que nessas condi¸c˜oesk(u, ei)≥0 parai= 1, ..., n,
portantoP
ik(u, ei)≥0. Agora se
P
ik(u, ei) = 0, ent˜aok(u, ei) = 0 eu⊥[ei,❣] para
i= 1, ..., n.Da´ıu⊥[❣,❣]. Reciprocamente se u⊥[❣,❣], ent˜ao u⊥[ei,❣] para i= 1, ..., n
e a igualdade vale novamente por 3.1.2.
Uma consequˆencia imediata ´e que seu∈❩✭❣✮ ent˜ao r(u)≥0.
Teorema 3.2.2. Um grupo de Lie conexo admite uma m´etrica invariante `a esquerda
cujas curvaturas de Ricci s˜ao estritamente positivas se, e s´o se, ´e compacto com
grupo fundamental finito.
Demonstra¸c˜ao. Inicialmente note que todo grupo de Lie com uma m´etrica Rieman-niana invariante `a esquerda ´e homogˆeneo, portanto completo. Se r > 0 ent˜ao a aplica¸c˜ao r:Sn−1 →R admite um minimoc > 0 e pelo Teorema de Bonnet-Myers (veja [2] pg. 221-223) G ´e compacto. Passando ao recobrimento universal ˜G de G, tal grupo de Lie com a m´etrica induzida pelo recobrimento ´e completo e sua curvatura de Ricci ˜r satisfaz ˜r ≡ r, portanto ˜r > ce novamente por Bonnet-Myers
˜
G ´e compacto. Desta forma a proje¸c˜ao π : ˜G −→ G possui n´umero de folhas de recobrimento finito e como tal n´umero coincide com a cardinalidade deπ1(G), segue queπ1(G) ´e finito. Reciprocamente, seG´e compacto, ent˜ao ele admite uma m´etrica bi-invariante, referente a qual ad(x) ´e anti-adjunta ∀x∈❣. Se π1(G) ´e finito ent˜ao
˜
G´e compacto. Analisando ❣ note que se [❣,❣] 6=❣, ent˜ao existe um homomorfismo de❣em Rn˜ao trivial. Para isso tome uma base{e1, ..., em}de [❣,❣] e estenda a uma
base{e1, ..., em, em+1, ..., en}de❣. Escolha um vetor ej com j =m+ 1, ..., ne defina
a transforma¸c˜ao linear f :❣→ Rpondo f(ej) = 1 e f(ei) = 0 se i6=j. Assim para
Observa¸c˜ao 3.2.3. Na se¸c˜ao 7 veremos que se G ´e compacto com π1(G) finito, ent˜ao G admite uma m´etrica bi-invariante com curvatura de Ricci constante e po-sitiva.
Lema 3.2.4. Se u ´e ortogonal ao ideal [❣,❣], ent˜ao r(u) ≤ 0, e a igualdade ´e satisfeita se e somente se ad(u) ´e anti-adjunta.
Demonstra¸c˜ao: Ser´a apresentada na se¸c˜ao 5.
Teorema 3.2.5. Suponha que a ´algebra de Lie ❣ de G seja nilpotente, mas n˜ao-comutativa. Ent˜ao para qualquer m´etrica invariante `a esquerda existe uma dire¸c˜ao
de curvatura de Ricci estritamente negativa e uma dire¸c˜ao de curvatura de Ricci
estritamente positiva.
Demonstra¸c˜ao. Se❣´e nilpotente e n˜ao comutativa, a s´erie central descendente
❣⊃[❣,❣]⊃[❣,[❣,❣]]...
possui algum termo nulo. Escolhendo um vetor unit´ariouno ´ultimo termo n˜ao nulo da s´erie segue que u ∈ ❩✭❣✮ e est´a contido em [❣,❣], ou seja, u ∈ ❩✭❣✮ e u n˜ao ´e ortogonal a [❣,❣]. Portanto pelo Lema 3.2.1 r(u) > 0. Agora note que o espa¸co vetorial❣n˜ao pode ser gerado por [❣,❣] e❩✭❣✮, pois se❣= [❣,❣] +❩✭❣✮, ent˜ao [❣,❣] = [❣,[❣,❣] +❩✭❣✮] = [❣,[❣,❣]] e a s´erie se estabiliza precocemente. Portanto existe um vetor unit´ariov⊥[❣,❣] tal quev /∈❩✭❣✮, aad(v) sendo diferente de zero e nilpotente, n˜ao pode ser anti-adjunta. Com efeito, se ad ´e anti-adjunta com ad(v) 6= 0, assu-mindo indutivamente queadk(v)6= 0, teremos
ad2k(v), v =±
adk(v), adk(v)
6
= 0 e ad2k 6= 0, ou seja, ad(v) n˜ao seria nilpotente. Portanto do Lema 3.2.4 segue que
r(v)<0.
Teorema 3.2.6. Se a ´algebra de Lie de G contem vetores x, y e [x, y] linearmente independentes, ent˜ao existe uma m´etrica invariante `a esquerda tal que r(x) < 0 e
r([x, y])>0.
Demonstra¸c˜ao. Escolha uma base fixa b1, ..., bn com b1 = x, b2 = y e b3 = [x, y].
Para qualquerǫ >0, considere a base auxiliar e1, ..., en definida por
e1 =ǫb1, e2 =ǫb2, e3 =ǫ2b3, ..., e
3.3 Curvatura escalar 44
e defina uma m´etrica h., .iǫ , invariante `a esquerda exigindo que e1, ..., en seja
orto-normal. Seja ❣ǫ a ´algebra de Lie com tal base e m´etrica fixa. As novas constantes
de estrutura em termos das iniciais satisfazem
[ei, ej] = [ǫbi, ǫbj] = (αij1ǫ)ǫb1+ (αij2ǫ)ǫb2+ n
X
k=3
(αijk)ǫ2bk
sei, j = 1 ou 2,
[ei, ej] = [ǫbi, ǫ2bj] = (αij1ǫ2)ǫb1+ (αij2ǫ2)ǫb2 + n
X
k=3
(αijkǫ)ǫ2bk
sei= 1 ou 2 e j = 3, ..., ne
[ei, ej] = [ǫ2bi, ǫ2bj] = (αij1ǫ3)ǫb1+ (αij2ǫ3)ǫb2 + n
X
k=3
(αijkǫ2)ǫ2bk
sei, j = 3, ..., n.
Uma an´alise breve nos mostra que tomando ǫ→0 as novas constantes v˜ao a um limite bem definido e a ´algebra limite❣0 satisfaz [e1, e2] =−[e2, e1] =e3 e [ei, ej] = 0
caso contr´ario. Nessas condi¸c˜oes, pelos Lemas 3.2.1 e 3.2.4,r(e1)<0< r(e3) em ❣0. Por continuidade r(e1) < 0 < r(e3) para ǫ0 suficientemente pequeno. Desta forma a base e1 = ǫ0b1, e2 = ǫ0b2, e3 = ǫ20b3, ..., en = ǫ20bn, m´etrica h., .iǫ0 e constantes de
estruturas em ǫ0 definem a ´algebra inicial com m´etrica satisfazendo r(e1) < 0 < r(e3).
3.3
Curvatura escalar
Sejae1, ..., enuma base ortonormal para o espa¸co tangente de um dado ponto de
uma variedade Riemanniana. O n´umero real
ρ =r(e1) +...+r(en) = 2
X
i<j
k(ei, ej)
´e chamado a curvatura escalar no ponto.
Teorema 3.3.1. Se o grupo de Lie G ´e sol´uvel, ent˜ao toda m´etrica invariante `a esquerda em G´e flat ou deve possuir curvatura escalar estritamente negativa.