P RESENTATION GENERALE DES MATERIAUX COMPOSITES
L ES RENFORTS TISSES : DE LA FIBRE A LA PIECE FINALE
Structure multiéchelles du matériau
Chacune de ces deux grandes familles de fibres comporte néanmoins des nuances, notamment au niveau de la géométrie, de la composition chimique et du procédé de fabrication des fibres. Différents types de composition peuvent être réalisés : les fibres au sein de la mèche peuvent être torsadées, entrelacées ou simplement placées les unes à côté des autres ( mèche ou mèche), donnant plus ou moins de consistance à la mèche.

La mise en forme du composite à renfort tissé par LCM
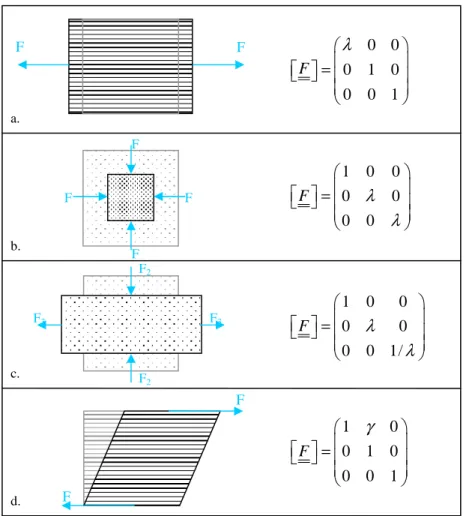
Déformation de la mèche (fibres perpendiculaires au plan de dessin). Cisaillement transversal du roving. Modes de déformation errante (la flèche indique la direction des fibres) : (a) allongement (b) compactage (c) déformation (d) cisaillement transversal.
C OMPORTEMENT MECANIQUE DES RENFORTS TISSES
Comportement à l’échelle mésoscopique
Les mécanismes de déformation errante sont pilotés par des interactions de fibres à plus petite échelle. S'incline légèrement après son signe de tête (vue de dessus et de côté) S'incline légèrement devant.
![Figure 1-10. Comportement en tension de mèches de verre (a) et de carbone (b) [DUM03a]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462653.68627/24.892.165.775.91.391/figure-10-comportement-tension-mèches-verre-carbone-dum03a.webp)
Comportement à l’échelle macroscopique
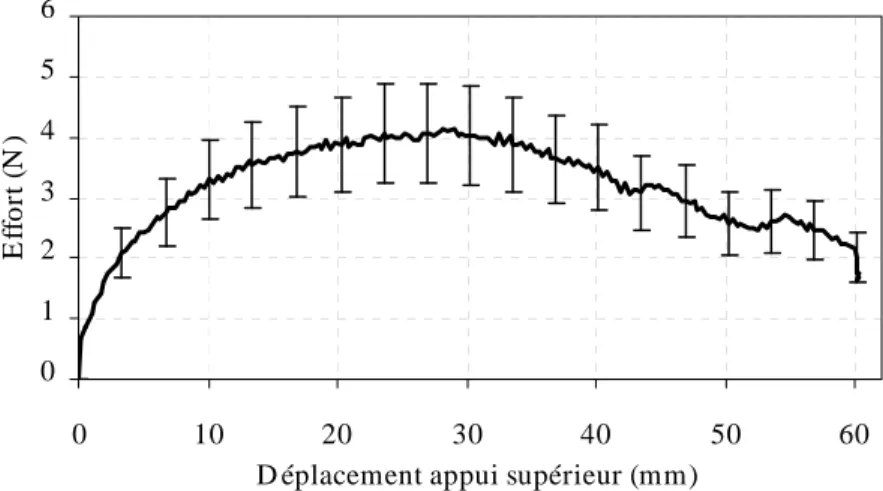
La longueur de la mèche restant constante, cette augmentation du retrait se traduit par un « avalement » des mèches dans cette direction. Plusieurs compressions consécutives d'une même éprouvette ont été réalisées, illustrant ainsi l'influence de l'historique de déformation sur le comportement du renfort.
![Figure 1-17. Traction uniaxiale sur un taffetas de verre: mécanismes et courbe expérimentale [BUE98]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462653.68627/29.892.132.723.187.450/figure-traction-uniaxiale-taffetas-mécanismes-courbe-expérimentale-bue98.webp)
S IMULATION DE LA MISE EN FORME
Simulations à l’échelle microscopique
Le comportement de la fibre est linéairement orthotrope et ses grandeurs caractéristiques sont relativement bien connues. En particulier, un modèle de tissage a été développé [ZHO04], qui permet, dans certaines limites, de prédire la géométrie des rovings au sein du maillage élémentaire du renfort.
Simulations à l’échelle macroscopique
Parmi les approches mécaniques, on distingue généralement les approches discrètes, les approches continues et les approches semi-discrètes. Enfin, les approches semi-discrètes sont une combinaison des deux approches précédentes : on formule des éléments finis dans lesquels la puissance des efforts internes est subdivisée en différentes contributions, liées aux différentes raideurs du matériau.
![Figure 1-29. Différents types de raideurs des modélisations mésoscopiques discrètes [SZE05]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462653.68627/39.892.136.717.366.463/figure-29-types-raideurs-modélisations-mésoscopiques-discrètes-sze05.webp)
Simulations à l’échelle mésoscopique
Des invariants ont été définis pour chacun des modes de déformation de la nappe de renfort tissée. Résumé des paramètres de la loi de comportement hyperélastique du fusible et des tests utilisés pour leur identification.
![Figure 1-32. Modélisation analytique de Kawabata [KAW73a]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462653.68627/41.892.190.668.88.339/figure-1-32-modélisation-analytique-kawabata-kaw73a.webp)
C INEMATIQUE DES GRANDES TRANSFORMATIONS
Tenseur gradient de la transformation
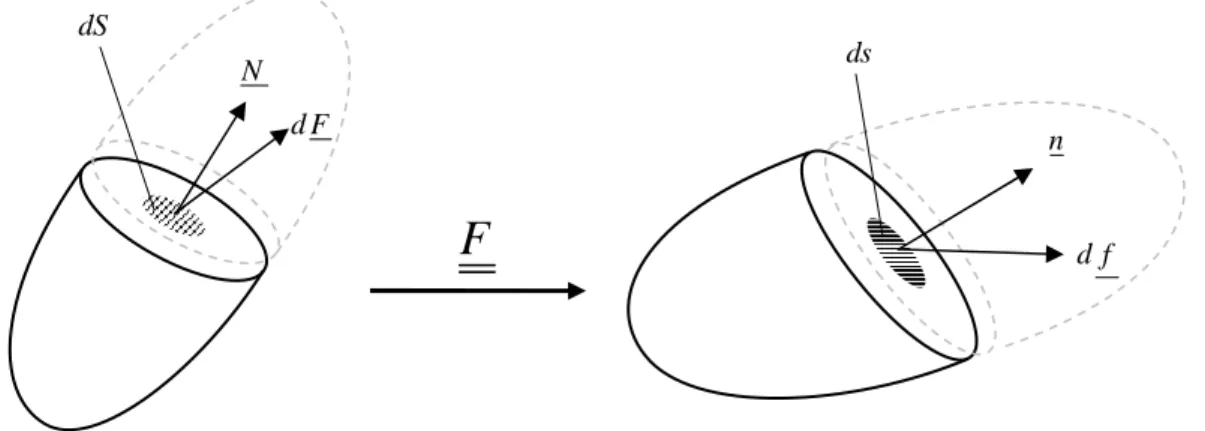
Ainsi défini, le tenseur de gradient de transformation F constitue une description locale (au premier ordre) de la transformation du solide. Le volume déformé dv⊂ Ω est donné par la transformation jacobienne, c'est-à-dire par le déterminant du tenseur du gradient de transformation.
Mesures des déformations
La surface transformée da=dan , de normale n , est classiquement donnée par la formule de Nanson.
Vitesses de déformation
D ESCRIPTION DES EFFORTS INTERNES
Identification du comportement du fil de verre lors de l'extension 3.4.2.2 Identification du comportement lors du déplacement transversal. Comme pour la loi de comportement de la mèche présentée au chapitre 3, des invariants sont associés à chaque type de déformation du renfort de verrouillage.
D UALITE CONTRAINTES – DEFORMATIONS
L OIS DE COMPORTEMENT HYPERELASTIQUES
Formulation des lois de comportement hyperélastiques
La condition (2.32) dépend de la forme choisie pour l'énergie de déformation, elle doit donc être vérifiée lors de l'établissement concret de la constitution. Concernant la condition (2.34), nous verrons alors, à travers les cas de l'isotropie et de l'isotropie transverse, que le respect des symétries du matériau est satisfait par l'introduction d'invariants du tenseur de loi de Cauchy-Green.
Hyperélasticité isotrope
Pour établir la loi de comportement d'un matériau hyperélastique, il suffit donc de déterminer l'énergie de déformation w qui correspond au comportement mécanique du matériau considéré. Dans le modèle d'Ogden [OGD84], l'énergie de déformation s'écrit en fonction des déformations principales λ1, λ2 et λ3.
Hyperélasticité anisotrope
Les modèles précédents sont alors utilisés en utilisant les invariants (dits « réduits ») I1 et I2 de F , et un terme en I3= J2 permet d'ajouter au modèle l'énergie de déformation liée à la dilatation du matériau. Le théorème de représentation permet alors la représentation de la fonction de densité d'énergie comme suit [QUA94, ITS07].
Différentes approches de modélisation
Déformation par cisaillement du maillage en fibre de verre élémentaire obtenu par la simulation. Dans ce contexte, une première loi de comportement hyperélastique a été formulée pour décrire le comportement de la mèche à une échelle mésoscopique.
I MPLEMENTATION DES LOIS DE COMPORTEMENT DANS A BAQUS /E XPLICIT
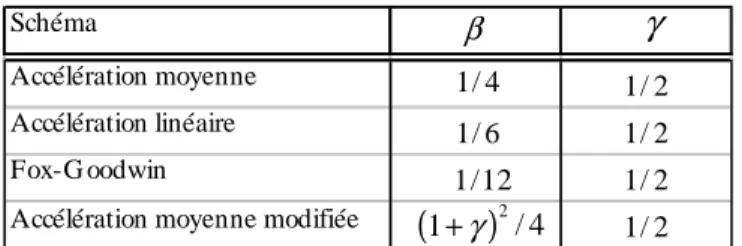
Schémas d’intégration temporelle
Le calcul du pas de temps critique associé à chaque élément est effectué par Abaqus de la manière suivante. Estimation du pas de temps critique en fonction de la longueur caractéristique de l'élément pour la mèche de fibre de verre étudiée.
Implémentation de subroutines VUMAT pour les matériaux hyperélastiques anisotropes
Un essai de traction sur un seul fusible permet de caractériser le comportement du fusible en extension.

H YPOTHESES SUR LE COMPORTEMENT DE LA MECHE
Isotropie transverse de la mèche
Des observations précises de la déformation microscopique et des mouvements des fibres dans une mèche ont ainsi été réalisées, démontrant les avantages d'une telle approche continue. La répartition des fibres dans une section du roving déformé a pu être analysée par tomographie aux rayons X [BAD08b] et il a été conclu que cette répartition est isotrope pour les matériaux étudiés dans ce manuscrit.
Modes de déformation de la mèche
Les forces et déformations qui se produisent lors de l'essai et de la simulation sont comparées. La connaissance de ces grandeurs est importante pour la simulation de l'injection de la résine dans le renfort.
D EFINITION D ’ INVARIANTS PORTEURS DE SENS PHYSIQUE
Une représentation particulière du gradient de la transformation…
Le tenseur de gradient de la transformation peut alors être écrit dans un repère dans lequel l'observateur serait fixe par rapport à la base {M N, 1, N2}. Ces relations impliquent que la matrice de Fɶ−1 en base {M N, 1, N2} a la forme suivante.
Invariants correspondant aux modes de déformation de la mèche
Enfin, cinq quantités αelong, αcomp, αdist, αcis et γ sont nécessaires pour décrire la transformation de mèche avec cette approche. Ces deux modes de déformation seront supposés indépendants, et l’énergie de déformation de la mèche sera supposée indépendante de cette grandeur.
Dérivation des invariants
Pour cela, les dérivées des invariants seront calculées en fonction des composantes du gradient de la transformation (3.12) dans la base {M N, 1, N2}. Cette expression est plus compliquée que les expressions précédentes car elle répartit les contraintes selon la manière dont chacune des deux directions possibles de cisaillement transversal est requise.
Bilan sur les invariants
L'influence de l'introduction d'une contrainte biaxiale sur le déplacement de la maille unitaire est très claire sur la figure 3-28. Déformation par cisaillement pur du maillage élémentaire de sergé de carbone obtenu à partir de la simulation.
E NERGIES DE DEFORMATION POUR CHACUN DES MODES DE DEFORMATION
Energie d’élongation
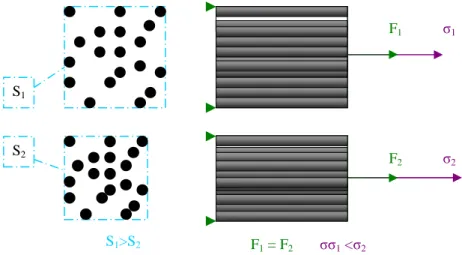
Ceci indique que cette non-linéarité est en réalité liée au comportement du foret et non à une mauvaise tenue du foret dans le mors lors de l'essai. L'aire S de la section de mèche étant connue (issue de la modélisation géométrique de la grille de base 0), trois paramètres doivent donc être déterminés : Ielong0, Kelong0 et Kelong.
![Figure 3-3. Essais de traction sur une mèche seule [BUE01].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462653.68627/79.892.202.650.96.379/figure-3-3-essais-traction-mèche-seule-bue01.webp)
Energie de compaction
Energie de distorsion dans le plan transverse
Dans les cas où le dénominateur de l’expression (3.35) disparaît, des simplifications surviennent et le tenseur des contraintes reste défini. Cependant, d'un point de vue numérique, il faudra traiter séparément le cas de l'invalidité du dénominateur lors de la mise en œuvre du code de conduite afin d'éviter d'obtenir des durées indéterminées.
Energie de cisaillement transverse
Bilan sur la loi de comportement
Les figures 3 à 6 montrent la comparaison des courbes d'énergie et de puissance obtenues pour chacun de ces cas de test. Pour chacun des cas-tests, les courbes de puissance obtenues sont également très proches des courbes théoriques.
I DENTIFICATION DE LA LOI DE COMPORTEMENT
- Modélisation géométrique des renforts étudiés
- Identification du comportement des mèches du taffetas de verre
- Identification du comportement des mèches du sergé de carbone
- Bilan sur la méthode d’identification de la loi de comportement
Les courbes obtenues et l'évolution de la fonction d'erreur à chaque itération de l'algorithme sont représentées sur la Figure 3-23. Cette méthode a permis d'identifier les paramètres de la loi de comportement associée aux deux types de renforts étudiés.

C OMPARAISONS SIMULATIONS / EXPERIENCES
Tension biaxiale
Le bon accord entre les courbes de contraintes biaxiales déséquilibrées, qui n'ont pas été utilisées pour l'identification, permet une première validation de la loi de comportement de l'âme en taffetas de verre. Les réseaux de contraintes biaxiales obtenus expérimentalement et par simulation pour le sergé de carbone sont comparés dans la figure 3-25.
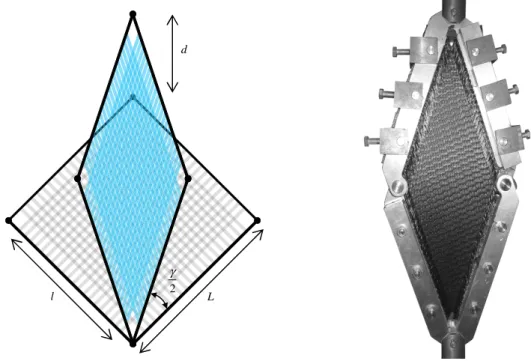
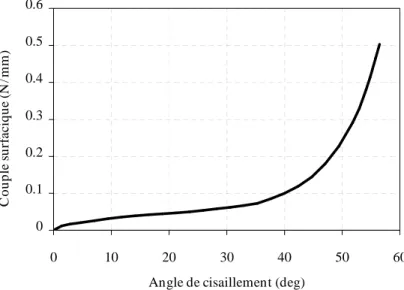
Cisaillement du renfort tissé dans le plan
Les couples de cisaillement, calculés à partir d'un test de cadre photo et de la simulation de cisaillement de cellule unitaire, sont illustrés à la Figure 3-27. La courbe la plus proche de la courbe expérimentale est celle obtenue pour une tension e = 0,0015.

C ONCLUSION DU CHAPITRE 3
Ajout de poutres dans les sens chaîne et trame pour modéliser l'influence du deuxième gradient de la transformation sur le comportement du renfort. Ces cas de charges ont donc permis de valider la loi de comportement hyperélastique proposée pour la description du comportement mécanique de la mèche de renfort tissée.
C OMPORTEMENT DU RENFORT INTERLOCK ET HYPOTHESES DE MODELISATION
Orthotropie des renforts interlocks
Comme les renforts 2D, les renforts interlock sont constitués d'un maillage chaîne et d'un maillage trame, perpendiculaires à la configuration de référence. Un matériau 3D homogénéisé correspondant peut donc être considéré comme orthotrope dans une configuration de référence avec des directions privilégiées.
Modes de déformation des interlocks
Avec la formule précédente, la dérivée de l’invariant de déplacement plan peut être exprimée de la manière suivante9. Les rayons de courbure de cette ligne moyenne au niveau du support sont plus petits dans le cas de la simulation que lors de l'expérience.
D EFINITION DES INVARIANTS
Invariants pour l’élongation dans les directions chaîne et trame
De la même manière que pour la loi de comportement de la mèche, les invariants choisis pour décrire l'allongement du renfort imbriqué dans les sens chaîne et trame seront les suivants. Considérant un gradient de transformation triangulaire supérieure dans la base {M1,M M2 3}, les tenseurs de direction des contraintes de Cauchy liées à l'allongement des directions chaîne et trame permettent la représentation suivante.
Invariant pour l’écrasement du renfort
Considérant un gradient de la transformation triangulaire supérieure dans la base {M1,M M2 3}, le tenseur directeur des contraintes de compactage induites par l'invariant (4.4) dans cette base admet la représentation suivante. Cette représentation est compatible avec les directions de contraintes recherchées : les contraintes de compactage obtenues en dérivant l'invariant Icomp sont perpendiculaires au plan du renfort.
Invariant pour le cisaillement plan du renfort
Pour calculer la dérivée ∂I421/∂C, on utilise la formule suivante qui donne la dérivée par rapport à un tenseur d'ordre 2 du produit d'un tenseur d'ordre 2 avec deux tenseurs d'ordre 1. 9 La dérivée d'un tenseur d'ordre 2 qui est symétrique par rapport à lui-même n'est pas intuitif : on pourrait dire en gros qu'il vient du fait que les composantes d'un côté et celles de l'autre sont liées par la diagonale.
Invariants pour les cisaillements transverses
Bilan sur les invariants
De plus, ce type d'essai met en évidence une courbure dans la largeur de l'éprouvette au niveau du point d'appui mobile de la cintreuse (figure 4-23a). Dans cette partie, une première approche est proposée pour modéliser la contribution du deuxième gradient de la transformation à l'écriture de la loi de comportement.
E CRITURE DES ENERGIES DE DEFORMATION ET IDENTIFICATION
Le renfort interlock étudié
Les coupes de la figure 4-4 montrent cependant que les géométries des mèches de chaîne et des mèches de trame, et notamment les contours, ne sont pas identiques. A partir de ce renfort, plusieurs essais expérimentaux de caractérisation de renforts épais emboîtables ont été développés au laboratoire dans le cadre de la thèse de J.G.
Tension dans les directions chaîne et trame
Ceux qui ont été utilisés seront présentés après avoir identifié le comportement mécanique des différents modes de déformation. A l'aide de ces tests, la densité d'énergie de déformation est attribuée à chaque mode de déformation (c'est-à-dire à chaque invariant).
Compaction transverse
Les contraintes de Cauchy issues de la simulation de compactage obtenues avec ces paramètres sont comparées sur la figure 4-6b. Un bon accord est obtenu entre la courbe expérimentale et la courbe issue de la simulation.
Cisaillement dans le plan du renfort
Plusieurs taux de déformation ont été testés pour examiner l'effet de la vitesse sur les simulations de tests de dilatation du biais proposées ici. La sensibilité du maillage des simulations des tests de dilatation du biais lorsque les éléments sont alignés avec les directions de déplacement.

Cisaillement transverse
Les courbes identifiées obtenues avec la description précédente de l'énergie de déformation sont présentées à la figure 4-16. La forme de l'énergie de déformation utilisée pour décrire le comportement du renfort en cisaillement transversal permet d'obtenir des simulations proches des résultats d'essais.

Bilan sur les densités d’énergie et sur l’identification
V ALIDATION DE LA LOI DE COMPORTEMENT
Flexion à 0°/90°
Les résultats obtenus avec cette première approche ont permis de confirmer que la loi de comportement homogénéisée du matériau autobloquant est dépendante du deuxième gradient de la transformation. Cette loi de comportement est formulée selon le même cadre que pour la formulation de la loi hyperélastique de la mèche.
Emboutissage hémisphérique
I NTERLOCKS ET MILIEUX DU SECOND GRADIENT
Comparaison des déformations en flexion 0°/90° obtenues de l'expérience et par superposition du modèle de poutre hyperélastique en considérant la partie de la loi de. Comparaison des déformations en flexion à 45° obtenues à partir de l'expérience et d'un modèle de poutre hyperélastique superposé en considérant la partie de la loi de.

C ONCLUSION DU CHAPITRE 4
Pour rendre compte de cette dépendance à la loi de comportement de la courbure, une première approximation a été introduite : deux réseaux de poutres ont été ajoutés dans le sens chaîne et trame. De plus, la définition de la loi de comportement, à partir d'une description des différentes formes de déformation, permet d'établir une modélisation plus physique et plus intuitive du comportement mécanique étudié.
![Figure 1-18. Cinématique et dispositif expérimental de l’essai de traction biaxiale [BUE98, BUE01]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462653.68627/30.892.151.808.95.345/figure-cinématique-dispositif-expérimental-traction-biaxiale-bue98-bue01.webp)