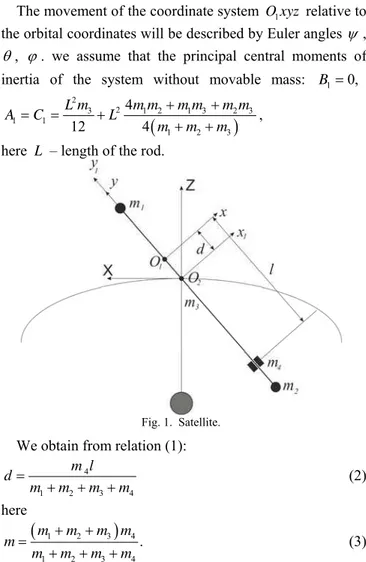
Gravitational Stabilization and Reorientation of a Dumbbell Shaped Artificial Satellite on the Principle of Swing in a Circular Orbit
Texto
Imagem
Documentos relacionados
The probability of attending school four our group of interest in this region increased by 6.5 percentage points after the expansion of the Bolsa Família program in 2007 and
So, because the amount of energy depends on the orbit characteristics, satellite attitude and geometr y, our contribution is modelling the incident radiation of a CubeSat
Este artigo discute o filme Voar é com os pássaros (1971) do diretor norte-americano Robert Altman fazendo uma reflexão sobre as confluências entre as inovações da geração de
The two points considered at the alternate sides, of the tangents through the diameter of the circle, and then the line joining these points divides the circle
social assistance. The protection of jobs within some enterprises, cooperatives, forms of economical associations, constitute an efficient social policy, totally different from
Abstract: As in ancient architecture of Greece and Rome there was an interconnection between picturesque and monumental forms of arts, in antique period in the architecture
We also determined the critical strain rate (CSR), understood as the tangent of the inclination angle between the tangent to the crack development curve and the crack development
The iterative methods: Jacobi, Gauss-Seidel and SOR methods were incorporated into the acceleration scheme (Chebyshev extrapolation, Residual smoothing, Accelerated
