Sara Manuela Eira Araújo
Manipulação Bimanual em Robôs
Antropomórficos: Movimentos Síncronos
Sara Manuela Eira Araújo
4
Manipulação Bimanual em R
obôs
Antr
opomór
ficos: Mo
vimentos Síncr
onos
Dissertação de Mestrado
Ciclo de Estudos Integrados Conducentes ao Grau de
Mestre em Eletrónica Industrial e Computadores
Trabalho efetuado sob a orientação de
Professora Doutora Estela Bicho
e sob co-orientação de
Doutora Eliana Oliveira da Costa e Silva
Sara Manuela Eira Araújo
Manipulação Bimanual em Robôs
A realização desta dissertação de mestrado contou com grandes e importantes contributos de várias pessoas, às quais ficarei eternamente grata.
Muito especialmente, gostaria de agradecer à minha orientadora, a Professora Doutora Estela Bicho, por me ter dado a oportunidade de fazer este trabalho tão aliciante e inovador e me ter proporcionado um ambiente de trabalho no laboratório excecional. Agradeço-lhe, profundamente, por todo o apoio científico, acompanha-mento e pela confiança que depositou em mim.
À Doutora Eliana Costa e Silva, pela co-orientação neste projeto e Professora Doutora Fernanda Costa, o meu sincero agradecimento por todo o apoio científico e pela colaboração na solução de dúvidas que surgiram ao longo da realização do trabalho.
Desejo agradecer também a todos os investigadores do Laboratório de Robótica Móvel e Antropomórfica, pela excelente receção e integração no seu grupo. Ao Luís, Toni, Gianpaolo, Rui, Flora, Emanuel, Tiago, Carlos, Miguel, Carolina e Weronika, o meu muito obrigada. Um redobrado obrigada ao Luís pela ajuda na integração com o sistema de planeamento de movimento anteriormente desenvolvido. Ao Toni outro redobrado obrigada pela sua boa vontade e disponibilidade em ajudar em qualquer assunto e ao Gianpaolo, pois foi o meu parceiro de trabalho, foi juntamente com ele que desenvolvi este projeto.
Não poderia deixar de agradecer a todos os colegas-alunos que se disponibilizaram para realizar algumas experiências importantes para este trabalho.
incondicional e amizade. Ao meu namorado, Daniel, o meu enorme obrigada por toda a paciência a aturar os meus problemas, pelo carinho e apoio que me deu. A eles dedico este trabalho e espero que esta etapa, que agora termino possa, de algum modo, compensar e retribuir todo o apoio e carinho que me ofereceram.
Manipulação Bimanual em Robôs Antropomórficos: Movimentos Síncronos
Este trabalho de mestrado consistiu na continuidade do trabalho anteriormente desenvolvido, que permitia à plataforma robótica ARoS desempenhar movimentos unimanuais semelhantes aos dos realizados pelos humanos (Costa e Silva, 2011; Araújo, 2013). Assim, o novo passo consistia em dotar este robô antropomórfico de movimentos bimanuais e também semelhantes aos dos realizados pelos humanos. Por isso, o modelo de controlo e planeamento de movimentos bimanuais, desenvolvido neste trabalho, conta com factos observados em investigações experimentais com humanos.
Essencialmente, o objetivo principal era gerar movimentos nos dois braços do robô, que de certa forma, representassem a capacidade de coordenação e cooperação dos dois braços humanos nas tarefas de manipulação bimanual de objetos. Como tal, desenvolveu-se um modelo de planeamento de movimento bimanual, considerando que para uma determinada tarefa de manipulação bimanual os dois braços começam e acabam o seu movimento ao mesmo tempo, ou seja, movimentos síncronos. O modelo de planeamento de movimento bimanual, de uma forma geral, consiste, primeiramente, no cálculo das posturas finais de ambos os braços e só depois de calculadas estas posturas é que se procede para o cálculo das trajetórias livres de colisões para os dois braços e mãos.
O modelo de planeamento de movimento bimanual síncrono, desenvolvido neste trabalho, foi validado a partir de duas tarefas de manipulação de objetos, onde o
vehicle, enquanto que na segunda as duas colunas encontram-se incorretamente
inseridas na base do toy-vehicle e o robô tem, assim, que corrigir a disposição das colunas. Os movimentos desempenhados pelo robô nestas duas tarefas demonstram um comportamento semelhante ao dos humanos, demonstram que este é capaz de movimentar os seus braços-mãos sem que estes colidam um com o outro, nem com os obstáculos presentes no cenário e que o algoritmo é capaz de calcular os movimentos num tempo muito reduzido.
De forma a demonstrar que o ARoS é capaz de executar uma tarefa bem mais complexa, desenvolveu-se um modelo que permite planear uma sequência de diferentes movimentos, tanto unimanuais como bimanuais síncronos. Assim, projetou-se uma terceira tarefa em que o robô tem que abrir uma garrafa térmica e entornar o seu líquido para o interior de um copo. Nesta tarefa é possível verificar que o robô consegue planear toda a sequência de movimentos, em que cada movimento é determinado num curto espaço de tempo. Além do mais, a forma como o robô desempenha esta tarefa é semelhante à forma como os humanos também a desempenhariam.
Bimanual Manipulation in Anthropomorphic Robots: Synchronous Movements
This master thesis consisted on the continuation of the work previously undertaken that allowed the robotic platform to perform unimanual movements similar to those realized by humans (Costa e Silva, 2011; Araújo, 2013). Thus, the next step consisted on endowing this anthropomorphic robot ARoS with human-like bimanual movements. Therefore, the model of control and planning bimanual movements, developed in this work, relies on facts and regularities observed in experimental investigations with humans.
Essentially the main goal was to generate movements in both robotic arms, which somehow represented the ability of coordination and cooperation between the two human arms in bimanual object manipulation tasks. As such, it was developed a model for planning bimanual movement, considering that for a given bimanual manipulation task the two arms begin and end their movement at the same time, i.e., synchronous movements. The bimanual movement planning model in a general way consists, first, in the calculation of the two final arms postures and then, once these postures have been computed, we proceed with the generation of collision free trajectories for the two arms and hands.
The synchronous bimanual movement planning model, developed in this work, was validated based on two object manipulation tasks, where the robot performs a sequence of bimanual movements. In the first task the robot has to grasp two columns disposed on the table and insert them in the toy-vehicle base, while in the
by the robot in these two tasks showed a behaviour similar to the humans’ one, showed that the robot is able to move its arms and hands without them colliding with each other neither with the obstacles in the environment and that the algorithm is capable of calculating the movements in a very short time.
In order to demonstrate that ARoS is able to perform a more complex task, we developed a model that allows to plan a sequence of different movements: unimanual and bimanual synchronous movements. Thus, it was projected a third task in which the robot had to open a thermos bottle and pour the liquid into a glass. In this task it was possible to check that the robot is able to plan the entire sequence of movements, where each movement is calculated in a short time. Furthermore, the way that the robot performs this task is similar to the way that humans also would perform.
1 Introdução 1
1.1 Motivações Gerais . . . 2
1.1.1 A Evolução dos Robôs . . . 2
1.1.2 Porquê Robôs Antropomórficos? . . . 6
1.1.3 Manipulação Bimanual . . . 8
1.2 Enquadramento e Objetivos . . . 11
1.2.1 Ponto de Partida . . . 11
1.2.2 De Movimentos Assíncronos para Síncronos . . . 16
1.3 Estrutura da Dissertação . . . 17
2 Estado da Arte 19 2.1 Classificação de Tarefas Bimanuais . . . 19
2.2 Manipulação Bimanual na Robótica . . . 22
2.2.1 Métodos de Planeamento de Movimentos Bimanuais . . . 25
2.2.1.1 Método Probabilístico RRT . . . 25
2.2.1.2 Método Baseado em Comportamentos . . . 28
2.2.1.3 Programação por Demonstração . . . 29
2.2.1.4 Método Baseado em Sistemas Dinâmicos e Campos de Força . . . 32
2.3 Manipulação Bimanual nos Humanos . . . 34
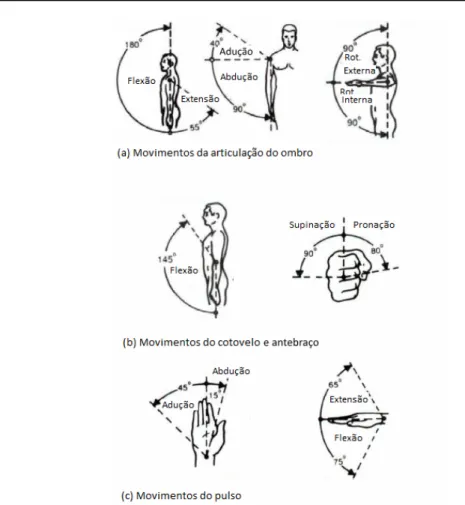
2.3.1 Caraterísticas do Braço Humano . . . 35
2.3.2.1 Caraterísticas dos Movimentos do Braço . . . 45
2.3.2.2 “End-State Comfort Effect” em Tarefas Bimanuais . 47 2.3.2.3 Coordenação Motora dos Braços . . . 49
3 Plataforma Robótica ARoS 53 3.1 Construção e Caraterísticas . . . 53
3.1.1 Disposição dos Braços . . . 55
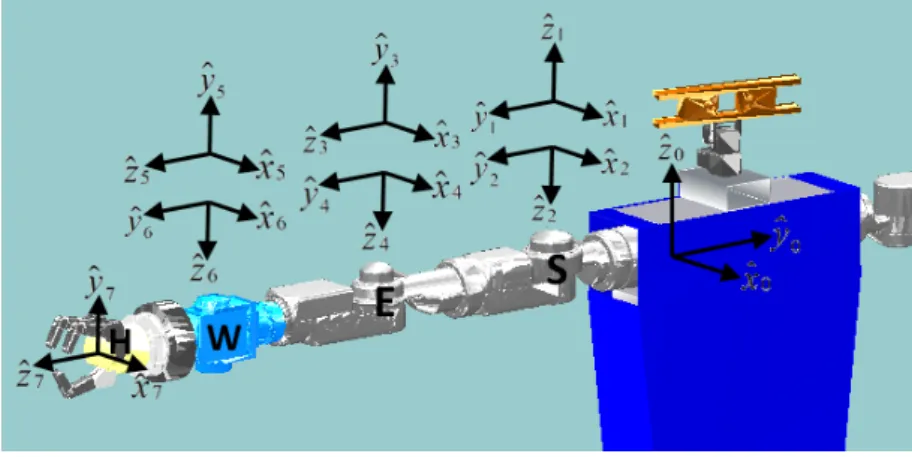
3.2 Cinemática dos Braços Robóticos . . . 57
3.2.1 Cinemática Direta do Braço Direito . . . 59
3.2.2 Cinemática Inversa do Braço Direito . . . 64
3.2.2.1 1o Passo: Determinar a posição e orientação do pulso 65 3.2.2.2 2o Passo: Calcular θ4 . . . 65
3.2.2.3 3o Passo: Determinar a posição e orientação do coto-velo a partir de α . . . 66
3.2.2.4 4o Passo: Determinar θ1, θ2 e θ3 . . . 67
3.2.2.5 5o Passo: Determinar θ5, θ6 e θ7 . . . 68
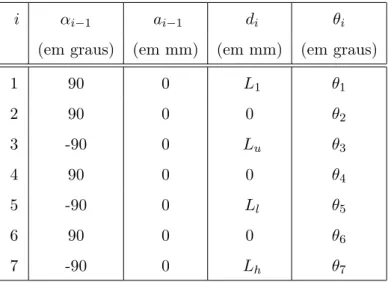
3.2.3 Cinemática Direta do Braço Esquerdo . . . 69
3.2.4 Cinemática Inversa do Braço Esquerdo . . . 74
3.3 Mãos Robóticas . . . 75
3.3.1 Cinemática Direta da Mão . . . 75
3.3.2 Cinemática Inversa da Mão . . . 77
4 Planeamento de Movimento Bimanual Síncrono 79 4.1 Visão Geral . . . 79
4.2 Seleção das Posturas Finais . . . 83
4.2.1 Tipos de Grip . . . . 85
4.2.2 Postura Final das Mãos . . . 87
4.2.3 Postura Final dos Braços . . . 89
4.3.2.1 Seleção da Postura de Bounce . . . 94
4.4 Tempo Total do Movimento . . . 96
4.5 Implementação do Software de Otimização . . . 97
4.5.1 Modelação do Corpo do ARoS e Obstáculos . . . 97
4.5.2 Problemas de Otimização . . . 99
4.5.3 Software de Otimização . . . 101
5 Sistema Geral de Planeamento de Movimentos 103 5.1 Software de Planeamento de Movimento . . . 103
5.2 Simulador . . . 106
6 Validação do Modelo de Planeamento de Movimento Bimanual Sín-crono 109 6.1 Tarefa 1 . . . 109
6.1.1 Implementação da Tarefa em Software . . . 111
6.1.1.1 Criação do Cenário em Simulador . . . 111
6.1.1.2 Formulação dos Movimentos . . . 111
6.1.1.3 Tipos de Grip . . . . 114
6.1.2 Desempenho do Planeamento da Tarefa - Resultados . . . 115
6.1.3 Comparação com o Desempenho Humano . . . 119
6.2 Tarefa 2 . . . 120
6.2.1 Implementação da Tarefa em Software . . . 121
6.2.1.1 Criação do Cenário em Simulador . . . 121
6.2.1.2 Formulação dos Movimentos . . . 122
6.2.1.3 Tipos de Grip . . . . 125
6.2.2 Desempenho do Planeamento da Tarefa - Resultados . . . 126
6.2.3 Comparação com o Desempenho Humano . . . 130
7.1 Definição da Tarefa 3 . . . 135
7.1.1 Sequência e Coordenação dos Movimentos . . . 136
7.2 Implementação da Tarefa em Software . . . 138
7.2.1 Criação do Cenário em Simulador . . . 138
7.2.2 Formulação dos Movimentos . . . 139
7.2.3 Tipos de Grip . . . . 145
7.3 Desempenho do Planeamento da Tarefa . . . 146
7.4 Conclusões . . . 150
8 Conclusões e Trabalho Futuro 153 8.1 Conclusões . . . 153
8.2 Relevância Científica . . . 156
8.3 Trabalho Futuro . . . 157
Abreviatura Descrição
ARoS Anthropomorphic Robotic System - Plataforma robótica
antropomórfica da Universidade
DOF Degree Of Freedom - Grau de Liberdade
IK Inverse Kinematics - Cinemática Inversa
PMG Programa Motor Generalizado
RRT Rapidly-exploring Random Trees
1.1 Robô humanóide MM47 . . . 3
1.2 WABOT-1, WABOT-2 e ASIMO(2000) . . . 4
1.3 Exemplos de robôs antropomórficos . . . 6
1.4 “Uncanny Valley” de Mashiro Mori . . . 8
1.5 Exemplos de manipulação bimanual de objetos . . . 10
1.6 Robô antropomórfico ARoS . . . 12
1.7 Tipos de grip: ponto de partida . . . . 14
1.8 Fluxograma do planeamento de movimento: ponto de partida . . . . 15
2.1 Classificação de movimentos bimanuais humanos . . . 20
2.2 Exemplos de diferentes configurações robóticas bimanuais . . . 24
2.3 Visão geral do processo de planeamento bimanual - Grasp-RRT . . . 27
2.4 Modelo baseado no comportamento . . . 28
2.5 Esquema do ciclo de programação por demonstração . . . 30
2.6 Sequência das posturas chave referentes à tarefa do chá . . . 32
2.7 Metáfora da marioneta ao modelo Passive Motion Paradigm . . . . . 33
2.8 Modelo anatómico padrão dos planos imaginários do corpo humano . 35 2.9 Movimentos gerais do braço humano . . . 37
2.10 Representação da cinemática do braço humano . . . 38
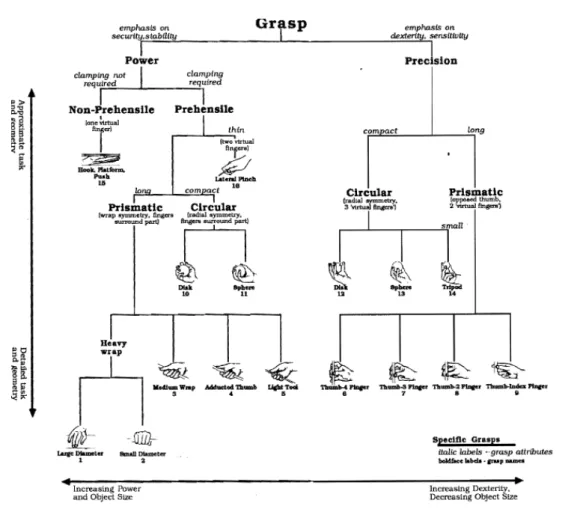
2.11 Um objeto-alvo pode ser agarrado com múltiplas configurações do braço 38 2.12 Taxonomia referente às diferentes configurações de manipulação da mão humana . . . 40
2.15 Posture-Based Motion Planning Model . . . . 46
2.16 Conceito do programa motor generalizado para a coordenação bimanual 50 2.17 Intermanual crosstalk model . . . . 50
3.1 Representação da plataforma robótica ARoS . . . . 54
3.2 Braços robóticos do ARoS . . . . 54
3.3 Referencial de origem do mundo para o ARoS . . . . 55
3.4 Esquemático para a razão da disposição do braço esquerdo . . . 56
3.5 Cinemática direta e inversa . . . 58
3.6 Braço robótico direito na posição zero e respetivos referenciais atribuídos 59 3.7 Referenciais da mão direita e do objeto-alvo . . . 63
3.8 Braço robótico do ARoS e a sua redundância . . . . 64
3.9 Representação trigonométrica para o cálculo de θ4 . . . 66
3.10 Referencial para caraterizar a redundância do braço. . . 66
3.11 Braço robótico esquerdo na posição zero e respetivos eixos coordenados 70 3.12 Referenciais da mão esquerda e do objeto-alvo . . . 73
3.13 Rotação ao longo do eixo x . . . . 74
3.14 Caraterísticas das mãos robóticas do ARoS . . . . 75
3.15 Representação das juntas da mão robótica . . . 76
4.1 Fluxograma do processo de planeamento de movimento bimanual síncrono . . . 83
4.2 Classificação dos modos de manipulação de objetos com em taxonomias 86 4.3 Tipos de grip de precisão e força . . . . 87
4.4 Demonstração da relação entre as distâncias dHO e dF H em dois tipos de grip . . . . 88
4.5 Relação entre a orientação da mão e do objeto-alvo . . . 90
4.6 Representação do corpo do ARoS com as suas esferas e cilindro . . . 98
5.2 Fluxograma do processo de resolução dos problemas de otimização não-lineares Pa e Pb. . . 105 5.3 Simulador do ARoS . . . . 106 5.4 Ilustração da semelhança do objeto real e do objeto em simulador . . 107 6.1 Demonstração do cenário para a Tarefa 1 . . . 110 6.2 Ilustração do cenário em simulador da Tarefa 1 . . . 111 6.3 Sequência de movimentos bimanuais planeados para a Tarefa 1 . . . 112 6.4 Demonstração da orientação das mãos com os seus objetos-alvo para
a Tarefa 1 . . . 115 6.5 Representação da sequência e caraterísticas dos movimentos da Tarefa
1 obtidos no simulador do ARoS . . . 116 6.6 Modelação dos braços robóticos para a Tarefa 1 . . . 117 6.7 Comparação das posturas dos humanos vs. do robô ARoS na Tarefa 1 119 6.8 Demonstração do cenário para a Tarefa 2 . . . 120 6.9 Ilustração do cenário em simulador da Tarefa 2 . . . 121 6.10 Sequência de movimentos bimanuais planeados para a Tarefa 2 . . . 122 6.11 Demonstração da orientação das mãos com os seus objetos-alvo para
a Tarefa 2 . . . 126 6.12 Representação da sequência e caraterísticas dos movimentos da Tarefa
2 obtidos no simulador do ARoS . . . 127 6.13 Modelação dos braços robóticos para a Tarefa 2 . . . 128 6.14 Versão 1 do comportamento humano para a realização da Tarefa 2 . 131 6.15 Versão 2 do comportamento humano para a realização da Tarefa 2 . 131 6.16 Demonstração da execução real da Tarefa 2 pelo ARoS . . . 132 7.1 Demonstração de robôs capazes de desempenhar tarefas humanas . . 136 7.2 Ilustração do cenário em simulador da Tarefa 3 . . . 139 7.3 Sequência de movimentos planeados para a Tarefa 3 . . . 140
7.5 Representação da sequência e caraterísticas dos movimentos da Tarefa 3, obtidos no simulador do ARoS . . . 151
2.1 Resultados do desempenho do método de planeamento IK-RRT . . . 26 3.1 Dimensões do braço robótico do ARoS . . . 55 3.2 Limites das sete juntas do braço direito e esquerdo . . . 57 3.3 Parâmetros de Denavit-Hartenberg para o braço direito de 7-DOFs . 60 3.4 Parâmetros de Denavit-Hartenberg para o braço esquerdo de 7-DOFs 71 3.5 Dimensões da mão robótica e outros parâmetros . . . 75 3.6 Parâmetros de Denavit-Hartenberg para cada dedo k da mão robótica 76 4.1 Tipos de grip que o sistema de planeamento de movimento reconhece 87 6.1 Formulação dos movimentos que compõem a Tarefa 1 . . . 114 6.2 Descrição dos tipos de grip da Tarefa 1 . . . . 115 6.3 Valores dos parâmetros envolvidos nos problemas de otimização da
Tarefa 1 . . . 118 6.4 Resultados numéricos para os problemas de otimização Pa e Pb da
Tarefa 1 . . . 118 6.5 Formulação dos movimentos que compõem a Tarefa 2 . . . 125 6.6 Descrição dos tipos de grip da Tarefa 2 . . . . 126 6.7 Valores dos parâmetros envolvidos nos problemas de otimização da
Tarefa 2 . . . 129 6.8 Resultados numéricos para os problemas de otimização Pa e Pb da
7.3 Formulação dos parâmetros dos problemas de otimização da Tarefa 3 148 7.4 Resultados numéricos para os problemas de otimização Pa e Pb da
Introdução
A robótica antropomórfica é uma área em forte crescimento. Os sistemas robóticos deixaram de ser preferencialmente utilizados nas indústrias e estão a adotar novas aplicações, nomeadamente, para a assistência a humanos. Assim sendo, um grande interesse no desenvolvimento de robôs autónomos e capazes de colaborar com humanos em tarefas partilhadas, que envolvam a manipulação de objetos tem vindo a crescer. De acordo com alguns investigadores, por exemplo Fukuda et al. (2001), Breazeal (2003), Duffy (2003), Schaal (2007), o aspeto antropomórfico do robô e os movimentos semelhantes aos dos humanos são duas características fundamentais para promover a interação entre o humano e o robô. A interpretação dos movimentos pelo humano é facilitada e o facto do robô apresentar uma forma antropomórfica permite a este tirar vantagem do seu corpo, já que os ambientes humanos estão adaptados à forma do corpo humano.
A área da manipulação bimanual em robôs antropomórficos é uma recente e importante área de investigação que tem vindo a ganhar atenção ao longo dos últimos anos (Smith et al., 2012). Esta área depara-se com um grande desafio devido à alta complexidade intrínseca ao controlo e coordenação dos dois braços, especialmente quando os movimentos têm que ser semelhantes aos dos humanos e realizados num ambiente dinâmico e não controlado.
Este capítulo introdutório inicia com uma descrição das motivações gerais que levaram à escolha do tema. Posteriormente, é feito um enquadramento do tema desta
dissertação, juntamente com os objetivos. Por último, é apresentada a estrutura da dissertação.
1.1
Motivações Gerais
1.1.1 A Evolução dos Robôs
Ao longo do tempo o ser humano tem tentado encontrar soluções que lhe permitam facilitar, de algum modo, o seu trabalho e melhorar a qualidade de vida. Com a Revolução Industrial o Homem conseguiu um grande avanço nesse sentido, pois, deu os primeiros passos com a criação de máquinas industriais capazes de substituir o humano em determinados trabalhos.
O conceito dos robôs humanóides surgiu em 1921, quando o dramaturgo Checo Karel Capek escreveu a peça de teatro Rossum’s Universal Robots, em que introduziu pela primeira vez a palavra ”robô”, como um autómato com uma forma humana capaz de servir e interagir com o Homem.
Entretanto, na indústria, os robôs começaram a desenvolver-se e a ganhar grande popularidade. Estes robôs eram sistemas mecânicos programados para executar uma determinada tarefa vezes sem conta e num ambiente muito bem estruturado, como o da indústria. Estavam assim, longe de serem os robôs introduzidos por Karel, isto é, com morfologia e comportamento semelhante à do humano e capazes de interagirem com pessoas. Contudo, os robôs industriais desenvolveram-se rapidamente pois o seu uso permitia grandes vantagens como: o aumento da produtividade, a redução dos custos de fabricação, a melhoria da qualidade do produto, a substituição das tarefas pesadas e desgastantes para o operador humano por um robô, entre outras. Estes foram os principais fatores que levaram à expansão e desenvolvimento destes robôs a uma larga variedade de aplicações industriais.
Com o avanço da tecnologia e com a familiarização com as máquinas industriais, a visão de Karel Capek, relativamente aos robôs antropomórficos começou gradualmente a ganhar interesse, sobretudo, nas Universidades. Estes robôs deveriam apresentar uma forma antropomórfica, ou seja: exibir duas pernas para caminhar e dois braços
Figura 1.1: Robô humanóide MM47 desempenhando tarefas com os dois braços (imagem
da revista: Popular Mechanics, Julho de 1961).
para manipular objetos como o ser humano. A razão que levou os cientistas a debruçarem-se na criação de robôs antropomórficos sempre foi a ideia de criarem cópias de si mesmos, como afirma Fukuda et al. (2001).
Nos finais de 1950, o cientista e engenheiro Claus Scholz desenvolveu um robô com um aspeto muito semelhante ao do humano, como se pode ver na figura 1.1. Dadas as limitações da época o robô era operado por controlo remoto de modo a poder movimentar-se e manipular objetos com os dois braços. Posteriormente, outros se seguiram na investigação destes novos robôs, como a Universidade de Waseda que se mostrou pioneira no desenvolvimento da robótica antropomórfica com o início do projeto WABOT (WAseda roBOT) em 1970, que levou à criação do robô humanóide WABOT-1 em 1973, ilustrado na figura 1.2a. Este é um robô capaz de andar com as suas pernas e capaz de agarrar e transportar objetos com as mãos. Mais tarde, em 1984 nasceu o WABOT-2 (figura 1.2b), um robô mais avançado capaz de ler uma pauta de música com o seu sistema de visão e tocar piano com as suas mãos.
Por outro lado, potentes empresas tecnológicas também ganharam interesse neste tipo de robôs. Um dos casos foi a empresa HONDA que em 1986 deu os seus primeiros passos nesta área da robótica antropomórfica, começando por estudar
o princípio da locomoção com duas pernas e, posteriormente, passando para os movimentos dos braços e das mãos. No ano de 2000, nasce o robô ASIMO, um robô bastante avançado tecnologicamente e com uma perfeita semelhança com uma pessoa (ver figura 1.2c).
(a)WABOT-1 (b) WABOT-2 (c) ASIMO
Figura 1.2: WABOT-1, um dos primeiros robôs antropomórficos em grande escala,
cons-tituído por um sistema de controlo dos membros superiores e inferiores e sistema de visão. WABOT-2, um robô já mais avançado em comparação com WABOT-1, que conseguia tocar piano. ASIMO(2000) um robô com uma aparência bastante semelhante a uma pessoa e de grande nível tecnológico.
Consequentemente, imensos robôs antropomórficos começaram a surgir, o inte-resse começou a ser tão grande que em 2000 se criou uma conferência internacional direcionada para a robótica humanóide, a IEEE/RAS Conferência Internacional de
Robôs Humanóides. Todo este interesse e desenvolvimento tecnológico originou uma
enorme expansão desta área da robótica, dando assim, origem a um novo conceito: robôs de serviço. De acordo com Schraft and Schmierer (2000) estes robôs são plataformas robóticas que operam de forma autónoma, parcial ou totalmente, na realização de tarefas com o intuito de proporcionar o bem-estar do humano.
A presença destes robôs de serviço pode ser visível em várias áreas do nosso quotidiano, nomeadamente: no ambiente doméstico como robôs que aspiram a casa e limpam piscinas autonomamente (http://www.irobot.com); nos hospitais como robôs que transportam os medicamentos (Engelberger (1993)) e até mesmo robôs
que colaboram em intervenções cirúrgicas com os médicos (Lanfranco et al., 2004); robôs guias em museus (Burgard et al., 1999), entre outras áreas.
Contudo, estas aplicações apenas nos trazem robôs autónomos para o nosso ambiente, onde a interação entre o humano e o robô não existe. Mas apesar de tudo são um grande avanço para que os robôs com capacidade de interação com humanos, chamados de robôs sociais (Fong et al., 2003), se apresentem na sociedade humana com o propósito de servir, cuidar, conviver e sobretudo, interagir com o humano no seu meio (Schaal, 2007).
O interesse nestes robôs sociais tem vindo a crescer e a prova é que atualmente já existem muitos tipos de robôs e cada um direcionado para uma determinada área, como por exemplo:
• Para cuidados de saúde - Tem-se o caso do robô Robovie (Sabelli et al., 2011), um robô humanóide remotamente operado para manter uma conversa com pessoas idosas. O robô RIBA que transporta pessoas com falta de mobilidade da cama para a cadeira ou o contrário (Mukai et al., 2010);
• Educação das crianças - Um exemplo é o robô QRIO (Tanaka et al., 2007) que interage com crianças através de movimentos, dançando e imitando-as. Para o caso de crianças autistas, estas parecem reagir também muito bem aos robôs humanóides, de acordo com Robins et al. (2005);
• Trabalhos em ambientes perigosos - Tem-se o caso dos robôs criados por Kim et al. (2006) para lidar com resíduos radioativos;
• Exploração do espaço - Como o caso do Robonaut 2 da NASA (Diftler et al., 2011) e o SAR-401 da Russia;
• Trabalhos nas linhas de montagem das fábricas - Um exemplo deste tipo de robôs é o Baxter (para mais informação tem-se o site: http://www. rethinkrobotics.com) adaptado para trabalhar juntamente com as pessoas numa fábrica. Um outro exemplo é o robô Nextage criado pela indústria Japonesa Kawada (consultar o site: http://nextage.kawada.jp/en/)
Resumindo e concluindo, é de salientar que os robôs rumam a um futuro com foco no ambiente humano, onde terão que trabalhar e interagir com humanos. Portanto, para o sucesso destes robôs, eles precisam de ser aceites pelo Homem, correspondendo assim, a certos padrões sociais e comportamentais aceites pelas pessoas. Assim sendo, a robótica terá que abraçar novas áreas de pesquisa como psicologia, neuropsicologia, sociologia e ética de forma a estudar o comportamento humano e aplicar aos robôs (Restivo, 2001; Schaal, 2007; Fong et al., 2003).
1.1.2 Porquê Robôs Antropomórficos?
Antropomorfismo deriva da palavra Grega “anthropos” para homem e “morphe” para forma ou estrutura, representa a tendência em atribuir caraterísticas humanas a objetos inanimados e animais com o propósito de ajudar a racionalizar ou interpretar as suas ações (Duffy, 2003). A criação deste tipo de robôs antropomórficos (ver figura 1.3) representa um grande desafio para a engenharia e ciência, mas no entanto não deixa de ser motivadora a sua investigação. Ao longo deste subcapítulo são apresentados alguns pontos que dão força para que se continue a investir nestes robôs com caraterísticas humanas.
(a) QRIO (b) ASIMO (c) Rollin’ Justin (d) ARMAR III
Figura 1.3: Alguns exemplos de robôs antropomórficos: em (a) QRIO da Sony (imagem
retirada do site: http://sitedojapao.webnode.pt/tecnologias/) e em (b) ASIMO da Honda (imagem retirada do site: http://asimo.honda.com/gallery/), robôs perfeitamente humanoides; em (c) Rollin’ Justin, desenvolvido por Borst et al. (2009), é um robô que apesar de não ter duas pernas não deixa de ter semelhanças com uma pessoa e em (d) ARMAR III (Asfour et al., 2006)
Para os robôs sociais, ou antes, robôs capazes de colaborar e interagir com humanos, o facto de serem feitos à semelhança do humano é visto como uma mais valia, pois i) o ambiente humano é projetado e construído atendendo à morfologia humana; ii) os humanos conseguem desempenhar uma variedade de tarefas e dotar o robô com a mesma morfologia permite que este tenha essa mesma capacidade.
Por outro lado, para uma eficiente interação entre humano e o robô porque não compreender primeiro a interação entre humano e humano? Pois bem, nós humanos enquanto observamos as ações de um outro humano conseguimos interpretar e antecipar o seu comportamento através dos movimentos do corpo como o das mãos, da cabeça, dos olhos; das expressões faciais; dos sons, entre outros. De acordo com Sebanz et al. (2006) a previsão das intenções do parceiro através da observação dos seus movimentos é considerado um ponto fundamental para uma eficiente ação conjunta entre dois indivíduos. Pois, através da visualização dos movimentos e do comportamento do parceiro, permite ao outro indivíduo (que observa) selecionar um comportamento complementar adequado (Bicho et al., 2011). Por conseguinte, a interação entre humano e robô pode ser facilitada se o robô apresentar uma morfologia e comportamento semelhante ao do humano, de modo a que o humano consiga ler e interpretar as intenções do robô e vice-versa (Fukuda et al., 2001; Breazeal, 2003; Duffy, 2003; Schaal, 2007). O antropomorfismo pode-se assim dizer que é uma tentativa de criar uma espécie de linguagem para a interação entre humano e robô. A morfologia e comportamento do robô representa um papel fundamental nas primeiras impressões e futuras expectativas que o humano cria acerca do robô. Assim sendo, tanto a estrutura como o comportamento do robô deve estar adequado à função para a qual ele é destacado (Leite et al., 2013), de modo a que o humano se sinta confortável com a sua presença. Para isso, o robô deve projetar uma quantidade de semelhança com um humano (traduzido da expressão em Inglês: “humanness”), mas sem deixar de mostrar aspetos que indicam que é um robô (ou seja, mostrar uma quantidade de “robotness”). Por outras palavras, deve haver um equilíbrio entre a quantidade de semelhança humana da estrutura do robô com as suas capacidades cognitivas. Isto para que o humano não desenvolva falsas expectativas
Figura 1.4: “Uncanny Valley” de Mashiro Mori.
em relação ao comportamento do robô (Duffy, 2003; Fong et al., 2003). Um exemplo claro deste pensamento é o caso da robô rececionista (Gockley et al., 2005), a cara perfeitamente humana do robô (disposta num ecrã) criou altas expectativas aos utilizadores humanos relativamente às capacidades de diálogo da rececionista robô. Mas, como as expectativas não foram correspondidas, o tempo que as pessoas despendiam com a rececionista diminuiu dia após dia. Aquele robô deixou de ser interessante para o utilizador.
De realçar, que o excesso de realismo nem sempre é bem aceite pelo humano. Estudos conduzidos por Mashiro Mori em 1970 e posteriormente revisitados por Dautenhahn (2002) e DiSalvo et al. (2002), indicam que a progressão de um robô não realista para um robô muito semelhante ao humano não é linear. Ou seja, quanto mais próximo o robô se assemelha a um humano, mais aceitação ele vai ganhar dos humanos. No entanto, pode chegar a um ponto em que pequenas imperfeições tornam o robô estranho ou até mesmo repulsivo, o chamado de vale misterioso (tradução do termo original em Inglês “uncanny valley” de Mori), veja-se a figura 1.4.
1.1.3 Manipulação Bimanual
A manipulação bimanual em robôs antropomórficos é uma importante área de investigação que tem vindo, recentemente, a ganhar bastante atenção (Smith et al., 2012). Isto porque (e como se pode ler nos pontos anteriores), é esperado que os
robôs apresentem uma estrutura e comportamento semelhante ao do humano, de forma a facilitar a sua integração no ambiente humano. Portanto, surge a necessidade do desenvolvimento de modelos que possibilitem aos dois braços e às duas mãos robóticas desempenharem movimentos humanos e de forma autónoma. Até agora, a manipulação robótica tem tido bastante desenvolvimento e sucesso nos manipuladores aplicados à indústria. Pois, estes estão inseridos num ambiente muito bem controlado o que facilita todo o processo de manipulação e, para além do mais, não necessitam de coordenar os movimentos de dois braços. Por outro lado, em ambientes complexos, dinâmicos e repletos de obstáculos como o ambiente humano, os robôs conseguem executar movimentos mais complicados com os dois braços e mãos, apenas quando operados por um humano (Kemp et al., 2007). A desvantagem deste método é que requer a disponibilização constante de uma pessoa para controlar e monitorizar.
A coordenação dos dois braços e das mãos é uma capacidade bastante complexa, que para nós humanos é bastante óbvia, pois foi alcançada através de muitos anos de prática e aprendizagem. Por exemplo, numa tarefa normal do dia-a-dia é normal definir qual o objeto a manipular, que braço e mão (direito ou esquerdo) faz o quê, de que modo é que a mão agarra o objeto, para onde olhar e quando. Assim, se o objetivo é dotar o robô com esta capacidade humana de manipulação e se lhe acrescentarmos: ponto 1) os vários números de graus de liberdade (DOFs), respetivos aos braços e mãos robóticas, que se tem que controlar (e que requerem grande poder computacional); ponto 2) as caraterísticas do objeto a manipular, ou seja, se este for deformável adiciona ainda mais DOFs e torna o movimento imprevisível; ponto 3) a preocupação com o evitar colisões com obstáculos num meio dinâmico e incontrolável e ponto 4) movimentos semelhantes aos dos humanos. Está-se perante um problema muito complexo e considerado como um dos desafios mais exigentes da robótica (Steffen et al., 2010).
Contudo e apesar dos grandes desafios intrínsecos à manipulação bimanual de forma humana e autónoma, existem alguns pontos que motivam a sua investigação e desenvolvimento, nomeadamente:
destreza e habilidade para executar uma determinada tarefa do dia a dia humano (visto que o ambiente está adaptado ao corpo humano, ou seja, a dois braços e duas mãos). Por outro lado, permite controlar dois objetos e controlar os objetos um em relação ao outro (Edsinger and Kemp, 2008). Por exemplo: abrir uma garrafa requer o uso obrigatório de duas mãos, uma para segurar e outra para remover a tampa (Steffen et al., 2010); ou até mesmo dobrar roupa ou uma folha de papel, como no caso apresentado em Elbrechter et al. (2012). • Se o objetivo é colocar o robô para interagir com um humano, faz todo o
sentido, que este apresente uma morfologia semelhante (dois braços e duas mãos parecidos com os dos humanos) para que os seus movimentos sejam mais facilmente compreendidos pela pessoa que interage com o robô (como foi argumentado na secção anterior).
• Dois braços e mãos estendem o espaço de trabalho do robô, estendem também a quantidade de tarefas que ele pode desempenhar e diminuem o tempo que demora a tarefa a ser executada.
(a) (b) (c) (d)
Figura 1.5: Exemplos de robôs a manipular objetos com os dois braços-mãos de forma
autónoma. Em (a) os dois braços trabalham de forma coordenada de modo a permitir abrir a garrafa (Steffen et al., 2010). Na figura (b) as duas mãos do robô dobram uma folha de papel (Elbrechter et al., 2012). Na figura (c) o robô ARMAR III agarra, um objeto com as duas mãos em simultâneo (Vahrenkamp et al., 2010). Em (d) o robô ASIMO da Honda, com uma mão segura a garrafa e com a outra o copo.
Esta ampla gama de motivações para a construção de robôs com dois braços e mãos levou a que se investisse e, consequentemente, se desenvolvessem várias
aplica-ções (Smith et al., 2012). Na figura 1.5 podem-se ver alguns casos que representam “o fruto” desta investigação, robôs autonomamente a manipular objetos com as duas
mãos.
De notar então que esta é uma área bastante promissora, mas, sem futuros avanços muitas aplicações robóticas, destinadas a existir na sociedade humana não serão possíveis, tais como: robôs para ajuda nas tarefas domésticas; robôs para trabalhar nas linhas de montagem das fábricas juntamente com humanos; robôs para ajudar os idosos e outras pessoas com pouca mobilidade; para auxílio em operações cirúrgicas; para exploração do espaço; entre outras.
1.2
Enquadramento e Objetivos
Como foi referido anteriormente, a área da manipulação bimanual em robôs antro-pomórficos é uma jovem área de investigação em grande expansão, existindo ainda muitos desafios a contornar e novas soluções a desenvolver. Sendo por isso, muito motivador e excitante a realização de trabalhos de investigação e desenvolvimento neste campo.
Com este trabalho pretende-se que os resultados possam contribuir no avanço da nova geração de robôs para que se consiga, muito brevemente, integrar estes robôs sociais ou se se preferir de serviços, na sociedade humana. Este projeto dá seguimento ao trabalho anteriormente desenvolvido por investigadores do Laboratório de Robótica Móvel e Antropomórfica da Universidade do Minho. Como tal, na secção que se segue faz-se um ponto da situação, de um modo resumido, do trabalho desenvolvido que serve como ponto de partida para o projeto desta dissertação. Posteriormente, são apresentados os aspetos e objetivos a ter em consideração no desenvolvimento e implementação do trabalho proposto nesta dissertação.
1.2.1 Ponto de Partida
O projeto da manipulação robótica iniciou-se com o trabalho de Costa e Silva (2011), em que se desenvolveu um modelo de planeamento e controlo de um braço e de
uma mão robótica do robô antropomórfico ARoS, de forma a este poder executar movimentos unimanuais de alcançar, agarrar e manipular objetos, de modo muito semelhante aos efetuados pelos humanos e livres de colisões. Isto numa primeira versão, posteriormente, adaptou-se um segundo braço e mão robótica no ARoS (concretamente o braço esquerdo) e alargou-se a gama de movimentos
“human-like” unimanuais para bimanuais coordenados assíncronos (Araújo, 2013). Por outras palavras, o sistema de planeamento e controlo do braço robótico planeava e movimentava um braço de cada vez.
A plataforma robótica ARoS foi projetada e construída no Laboratório de Robótica Móvel e Antropomórfica do Departamento de Eletrónica Industrial da Universidade do Minho (Silva, 2008). Esta consiste num tronco estático equipado com dois braços antropomórficos (recentemente adicionado o segundo braço) com 7 graus de liberdade em cada braço (ombro - 3 DOFs, cotovelo - 1 DOF, pulso - 3 DOFs); duas mãos robóticas com três dedos cada, o que perfaz um total de 4 graus de liberdade, por cada mão; um sistema de visão estéreo e também um ecrã disposto no seu peito. Na figura 1.6 pode-se ver uma foto do robô.
Figura 1.6: Robô antropomórfico ARoS da Universidade do Minho
Existem muitas maneiras para permitir que o robô agarre um determinado objeto, pois este pode ser agarrado em diferentes posições e orientações. Para além do mais, devido às caraterísticas do braço robótico, para uma determinada posição e orientação da mão este consegue obter uma grande variedade de possíveis posturas
do braço. Consequentemente, com a existência de requisitos como a velocidade e a duração do movimento, faz com que sejam possíveis várias e diferentes trajetórias para o braço e mão. Assim sendo, o modelo de planeamento de movimento desenvolvido permite solucionar estes problemas de redundância presentes aquando da ação de alcançar, agarrar e manipular objetos num espaço de trabalho tridimensional. O modelo de planeamento para movimentos unimanuais foi baseado em estudos de observação do comportamento e movimentos humanos, respetivamente dos braços e das mãos:
• O planeamento de movimento é realizado no espaço articular ou espaço das juntas (Graziano et al., 2002; Desmurget and Prablanc, 1997);
• As articulações movem-se em sincronia (Breteler and Meulenbroek, 2006); • O planeamento de movimentos é dividido em dois subproblemas (Elsinger and
Rosenbaum, 2003):
1. Seleção de uma postura final; 2. Seleção da trajetória.
A seleção da postura final é calculada antes do cálculo da trajetória e varia em função da postura inicial.
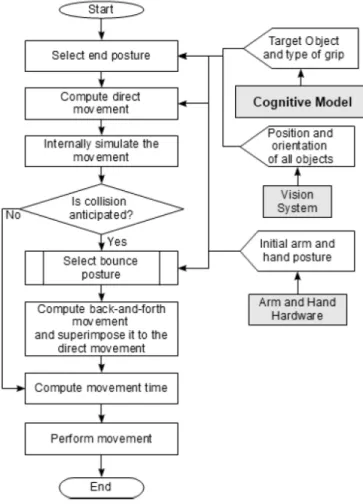
• O robô evita a colisão com os obstáculos através da sobreposição de dois movimentos: a) um movimento direto da posição inicial à final e b) um movimento de back-and-forth, ou seja, da posição inicial a uma intermédia (em que não haja colisão com o/os obstáculo/s, chamada postura de bounce) e para trás (Rosenbaum et al., 1999). Este último movimento, apresentado na alínea b) é também chamado de movimento de bounce.
• As articulações do braço apresentam uma velocidade angular em forma de sino (do Inglês bell-shaped) (Wada and Kawato, 2004; Rosenbaum et al., 1995). O planeamento do movimento para um braço começa com a seleção de uma
2) a informação do Sistema Cognitivo acerca do objeto-alvo e do modo apropriado
para o agarrar e 3) a informação dada pelo sistema de visão relativamente à posição e orientação dos objetos no cenário. O modo apropriado para agarrar o objeto, dado
à priori pelo sistema cognitivo, é escolhido de entre os quatro possíveis modos de
agarrar, ou mais comummente chamados de tipos de grip. Estes são: • Polegar à esquerda do objeto, ver figura 1.7a;
• Polegar à direita do objeto, ver figura 1.7b; • Polegar por cima do objeto, ver figura 1.7c; • Polegar abaixo do objeto, ver figura 1.7d.
(a) (b) (c) (d)
Figura 1.7: Tipos de grip: ponto de partida
O processo de escolha da postura final para o braço e mão robótica do ARoS divide-se em: a) divide-seleção do conjunto de valores das juntas dos dedos da mão (definidos pelo tipo de grip) e b) seleção do conjunto de valores das juntas do braço. Deste modo, para a seleção do conjunto das juntas do braço, tem-se em conta a minimização do custo associado ao movimento das juntas de uma posição inicial a uma final e um conjunto de restrições que permitem definir a postura ideal, como por exemplo: os limites máximos e mínimos de cada junta, a orientação e posição do objeto-alvo, os obstáculos, entre outros.
Tendo-se a postura final encontrada, segue-se para a seleção da trajetória que pode ser constituída pela sobreposição de dois movimentos: movimento direto e movimento de bounce. Para cada junta, a trajetória respetiva ao movimento direto da posição inicial à final é calculada. Seguidamente, de forma a verificar se existe
alguma colisão com obstáculos ao longo dessa trajetória, é usado o algoritmo da cinemática direta para, internamente, simular todo este movimento direto. Assim sendo, se nenhuma colisão for antecipada o movimento é executado, caso contrário, entra em ação o movimento de bounce. Para este movimento seleciona-se uma postura de bounce adequada de modo a permitir determinar o movimento de back-and-forth, a ser sobreposto ao movimento direto. Para selecionar esta postura de bounce, usa-se o mesmo critério que para a postura final, isto é, o mínimo deslocamento das juntas. Para além deste utiliza-se um outro critério, o assegurar um movimento desde o inicio ao fim livre de colisões, considerando algumas restrições.
Figura 1.8: Fluxograma respetivo ao planeamento de movimento de um braço e mão: ponto
de partida. Fluxograma retirado de Costa e Silva (2011)
um só braço e mão (ou seja, movimento unimanual). Para uma melhor compreensão, a figura 1.8 apresenta o respetivo fluxograma.
Relativamente aos movimentos bimanuais assíncronos, estes são planeados de forma semelhante devido ao facto de serem assíncronos. Para tal basta diferenciar no modelo o braço esquerdo do direito. Os tipos de grip representados na figura 1.7 são válidos para a mão esquerda e direita.
1.2.2 De Movimentos Assíncronos para Síncronos
Tendo-se o ponto de situação feito, esta dissertação tem como objetivo dotar o ARoS de movimentos bimanuais síncronos, que comparativamente com um humano, realize tarefas de uma forma semelhante aos humanos. Para ser capaz de realizar tarefas de um modo “human-like”, o robô tem que cumprir uma série de requisitos, tais como:
• A estrutura do robô deve ser parecida com a de uma pessoa, ser dotado de dois braços e duas mãos para conseguir manipular objetos tão bem como uma pessoa;
• Os movimentos dos dois braços e das duas mãos têm que ser realizados de uma forma semelhante aos realizados pelos humanos, de forma a exibir um comportamento socialmente aceite;
• O método de planeamento do movimento dos braços e das mãos deve ter em consideração todos os obstáculos presentes no espaço de trabalho e também o seu próprio corpo, isto para que o robô possa evitar colisões;
• O processo de cálculo do movimento dos dois braços e mãos, englobando todas as caraterísticas anteriores, deve ser de tal modo rápido que permita o planeamento e a execução de todo o movimento em tempo-real.
A necessidade de dotar o ARoS de movimentos bimanuais síncronos, vem da necessidade de se melhorar cada vez mais as capacidades desta plataforma robótica, de modo a permitir que possa desempenhar uma maior gama de movimentos e por conseguinte diferentes tarefas. Assim sendo e a partir do trabalho anteriormente
desenvolvido, é necessário efetuar algumas modificações no sistema de planeamento e controlo de movimentos. Por isso, os principais objetivos para este trabalho de dissertação são:
• Estudar o comportamento humano, relativamente aos movimentos dos braços e mãos para um melhor entendimento da capacidade de coordenação e cooperação dos braços;
• Definir movimentos bimanuais e novos cenários;
• Dar mais robustez ao processo de otimização, utilizando o solver IPOPT inserido no software de desenvolvimento MATLAB R;
• Estender o modelo de planeamento de movimento de unimanual para bimanual; • Modelar novas restrições temporais e espaciais a serem implementadas no problema de otimização, a fim de satisfazer os requisitos de sincronização, essenciais para a execução de tarefas bimanuais;
• Introduzir um comportamento humano nos movimentos dos dois braços e das duas mãos do ARoS, isto é, o comportamento deve estar presente na forma como o robô agarra o objeto ou os objetos e, na forma como escolhe os movimentos atendendo ao objetivo da tarefa.
1.3
Estrutura da Dissertação
As restantes partes deste trabalho de Dissertação estão organizadas da seguinte forma:
Capítulo 2 é constituído por três subcapítulos. O primeiro apresenta uma
classifica-ção para os movimentos referentes a tarefas de manipulaclassifica-ção bimanual de objetos. O segundo apresenta o estado da arte referente à manipulação bimanual na robótica e o terceiro referente à manipulação bimanual nos humanos;
Capítulo 3 apresenta importantes aspetos da plataforma robótica ARoS,
nomea-damente, caraterísticas da sua construção e os modelos da cinemática aplicada aos seus dois braços e duas mãos robóticas.
Capítulo 4 apresenta uma descrição detalhada acerca do desenvolvimento do modelo
de planeamento de movimentos bimanuais síncronos.
Capítulo 5 apresenta o software desenvolvido para o planeamento de uma sequência
de movimentos de uma determinada tarefa e aspetos do simulador do ARoS.
Capítulo 6 descreve as tarefas de manipulação de objetos propostas para a validação
do modelo de planeamento de movimento bimanual síncrono e apresenta os seus resultados.
Capítulo 7 descreve uma tarefa de manipulação de objetos composta por
movimen-tos bimanuais síncronos e unimanuais, proposta para validar o modelo geral de planeamento de movimentos.
Capítulo 8 apresenta as conclusões finais de todo o trabalho desenvolvido nesta
Dissertação de Mestrado juntamente com algumas propostas para o trabalho futuro.
Estado da Arte
Este capítulo começa por apresentar uma classificação das tarefas bimanuais tanto numa perspetiva dos humanos como no domínio da robótica. Posteriormente, é apresentado o estado da arte relativamente à manipulação bimanual na robótica e nos humanos. Isto, com o objetivo de se poder comparar estes dois casos, e assim, tirar algumas conclusões que possibilitem o desenvolvimento de uma nova abordagem para o planeamento e controlo dos movimentos bimanuais de uma forma mais “human-like”.
2.1
Classificação de Tarefas Bimanuais
O objetivo deste subcapítulo é fazer um estudo de forma a capturar as caraterísticas essenciais do comportamento bimanual humano e, posteriormente, no domínio da robótica.
Diariamente as pessoas realizam um grande número de movimentos com os dois braços e mãos de forma a desempenhar tarefas de manipulação de objetos. Uma tarefa bimanual é constituída por uma série de sub-tarefas ou sub-objetivos que cada braço-mão tem que cumprir, de forma a conseguir realizar com sucesso essa tarefa. Assim sendo, o investigador Guiard (1987) debruçou-se sobre este tema e propôs a seguinte classificação para os movimentos dos dois braços humanos:
tarefas em que não é necessário que os dois braços-mãos executem movimentos coordenados, por outras palavras, cada mão, independentemente, desempenha parte(s) de uma tarefa. Por exemplo: quando uma mão escreve notas num papel e a outra segura uma chávena de chá, ver figura 2.1;
Manipulação Bimanual Coordenada - ocorre em tarefas em que os braços
execu-tam os movimentos sincronizados entre eles, de forma a desempenhar diferentes partes da mesma tarefa. Estes movimentos bimanuais coordenados podem ser subdivididos em:
• Movimentos simetricamente coordenados - estes são movimentos em que os dois braços-mãos, basicamente, desempenham o mesmo papel numa determinada tarefa. Por exemplo: transportar um tabuleiro com as duas mãos (ver figura 2.1);
• movimentos assimetricamente coordenados - estes são movimentos em que os dois braços-mãos desempenham, numa tarefa de manipulação de objetos, ações diferentes mas coordenadas entre si, como escrever no teclado de um computador (ver figura 2.1).
Figura 2.1: Classificação de movimentos bimanuais humanos
No entanto, no domínio da robótica, Zacharias et al. (2011) propuseram uma classificação de um outro ponto de vista. Essencialmente, o conceito é visualizar
o problema da manipulação bimanual dando especial atenção às relações lógicas e geométricas de uma determinada tarefa. Para as relações lógicas propuseram a seguinte divisão de movimentos bimanuais:
Logicamente independentes - quando uma mão desempenha um movimento
independente do movimento da outra mão e não interfere no espaço de trabalho da outra. Pode ser comparado com movimentos bimanuais que ocorram simultaneamente mas sem ligação entre eles, ou seja, sem dependência nem interferência. Tem-se como exemplo o caso de se estar a escrever com uma mão enquanto a outra segura uma chávena de chá e a leva para beber;
Logicamente dependentes - quando os dois braços-mãos obedecem a uma bem
estruturada sequência de ações. Esta categoria de movimentos bimanuais pode ser sub-dividida em:
• Não cooperativos - quando ambos os braços-mãos não necessitam de cooperar entre eles, no entanto devem respeitar a ordem da sequência de sub-objetivos de uma determinada tarefa. Por exemplo, a tarefa de abrir uma gaveta, alcançar e agarrar um objeto para depois o colocar dentro da gaveta, não necessita obrigatoriamente dos dois braços-mãos a cooperar entre eles. Com um braço é possível executar todos estes passos, a desvantagem é que o processo será mais demorado;
• Cooperativos - quando ambos os braços-mãos precisam de estar tempo-ralmente e espacialmente coordenados entre si, de forma a desempenhar com sucesso a tarefa. Um caso para exemplificar pode ser o de retirar a tampa de uma garrafa, onde é obrigatório o uso das duas mãos, uma para segurar a garrafa e a outra para retirar a tampa.
Ainda na classificação de Zacharias et al. (2011), quanto à categorização dos movimentos bimanuais e atendendo à sua relação geométrica segue-se a seguinte proposta:
não influência nem restringe o espaço de trabalho do outro. Assim sendo, não pode existir nenhuma interferência espacial entre os dois manipuladores;
Espacialmente dependentes - quando o movimento de um braço (robótico) in-fluência ou/e restringe a área de trabalho do outro. Podendo haver possibilidade de colisão entre os braços-mãos.
No geral, um número de movimentos categorizados a nível lógico podem ser dife-renciados numa classificação a nível geométrico. Todos os movimentos bimanuais logicamente dependentes cooperativos são espacialmente dependentes.
2.2
Manipulação Bimanual na Robótica
Motivos muito fortes levam a que se desenvolvam sistemas robóticos bimanuais, como argumentado no capítulo introdutório, nomeadamente no subcapítulo 1.1.2 e 1.1.3 desta dissertação. Basicamente, as principais razões que levaram a este interesse podem ser descriminadas da seguinte maneira:
Semelhança com o operador - no caso de sistemas de manipulação por
tele-operação, o operador humano consegue transferir as suas habilidades bimanuais no lado remoto de uma forma mais intuitiva;
Destreza e força - em algumas aplicações é necessária a combinação de rigidez e
força, que é muito bem conseguida com a disposição de dois braços em paralelo; e a destreza também é aumentada;
Manipulabilidade - o facto de dispor de dois braços dá maior habilidade e destreza
para manipular objetos, estende o espaço de trabalho e a quantidade de movimentos. O grande número de DOFs e a redundância oferece grande
performance em muitas aplicações.
Cognição humana - assim como os humanos têm uma compreensão intuitiva
da manipulação bimanual, as ações de um robô que apresente dois braços são, então, mais fáceis de interpretar por um observador humano. Contudo,
sistemas bimanuais “human-like”, ou robôs antropomórficos têm sido largamente utilizados em aplicações relacionadas com a interação entre humano e robô;
Forma humana - os manipuladores robóticos com uma forma humana
desempe-nham com maior facilidade uma tarefa centrada num ambiente humano, pois este ambiente é projetado atendendo à morfologia dos seres humanos. Por esta razão, os robôs antropomórficos estão também a ser propostos para aplica-ções industriais com o intuito de interagir com os trabalhadores humanos ou substitui-los, sem que seja necessário modificar a área de trabalho.
Existe uma enorme variedade de plataformas robóticas dotadas de dois braços e de duas mãos. De facto, algumas dessas plataformas são projetadas para realizar tarefas de manipulação de objetos e podem variar no seu tipo de configuração. Algumas dessas plataformas são sistemas em que se colocam dois braços robóticos individuais, a fim de partilhar o mesmo espaço de trabalho, como a plataforma apresentada na figura 2.2a. No entanto, um notável esforço foi colocado na projeção de plataformas com dois braços dedicados. Como é o caso do robô Motoman SDA10 (ver figura 2.2b) e do robô Nextage (figura 2.2c), são robôs industriais capazes de executar movimentos bimanuais, no entanto apenas apresentam morfologia semi-antropomórfica do tronco à cabeça estando dispostos numa plataforma fixa a partir do torso. Por outro lado, existe um outro tipo de plataforma robótica semi-antropomórfica muito semelhante, mas com mobilidade, como é o caso do robô PR2 ilustrado na figura 2.2d. Por último, uma plataforma completamente antropomórfica com pernas, braços, cabeça, em tudo semelhante à morfologia duma pessoa. Este é o caso do robô da empresa Japonesa Kawada o HRP-4 (ver figura 2.2e).
De entre todos estes tipos de configurações robóticas muitos tipos de aplicações para os robôs são possíveis como para fins domésticos, para ajudar na educação de crianças, no trabalho em ambientes perigosos, na exploração do espaço, em trabalhos na indústria e entre muitos outros.
A literatura acerca de sistemas bimanuais é ampla e densa de conteúdo como se pode verificar através do trabalho de Smith et al. (2012), em que apresentam uma
(a)PRISMA Lab (b) SDA10 (c) Nextage
(d) PR2 (e) HRP-4
Figura 2.2: Exemplos de diferentes configurações robóticas bimanuais: (a) Dois braços
robóticos individuais PRISMA Lab (Caccavale et al., 2008); (b) Manipulador bimanual industrial Motoman SDA10 (Bloss, 2010); (c) Robô semi-antropomórfico industrial Nextage da empresa Kawada (http://nextage.kawada.jp/en/); (d) PR2, robô semi-antropomórfico móvel (Oyama et al., 2009) e em (d) HRP-4, robô completamente antropomórfico também da empresa Kawada (http://global.kawada.jp/mechatronics/hrp4.html).
visão detalhada deste tema destacando alguns desenvolvimentos recentes na área da manipulação robótica, nomeadamente nos seguintes campos:
• Modelação - que diz respeito ao modo como modelar o sistema de forma a este conseguir alcançar uma posição-alvo ou agarrar e manipular um objeto com os dois braços-mãos;
• Controlo - que diz respeito aos métodos de controlo de força/movimento por controlo dinâmico ou pela cinemática e controlo através do feedback visual; • Planeamento - diz respeito aos algoritmos para planeamento de movimento,
• Aprendizagem - diz respeito aos métodos que permitem fazer com que o robô aprenda os movimentos, através da observação do comportamento humano. Contudo e como está mais relacionado com este trabalho de dissertação, no seguinte subcapítulo é feita uma revisão apenas dos métodos de planeamento de movimento em plataformas robóticas bimanuais, incluindo os de aprendizagem.
2.2.1 Métodos de Planeamento de Movimentos Bimanuais
Os primeiros robôs com dois braços e mãos eram operados por humanos, portanto, não havia a necessidade de procurar um método de planeamento de movimento automático. No entanto com o surgimento de robôs autónomos, a pesquisa por métodos de planeamento de movimentos bimanuais viu um crescente interesse.
Contudo, e como referido no subcapítulo 1.1.3, dotar um robô humanoide com capacidade de manipulação bimanual autónoma é um problema bastante complexo. Os dois braços e mãos são sistemas redundantes com um elevado número de DOFs. Para além do mais, planear movimentos livres de colisões, no espaço euclidiano, para um sistema robótico com um elevado número de DOFs foi, desde cedo, considerado um desafio (Reif, 1979).
Atualmente, existe uma vasta gama de métodos para planeamento de movimentos, assim sendo, nos subcapítulos seguintes são apresentados aqueles que se focam nos movimentos bimanuais.
2.2.1.1 Método Probabilístico RRT
O método RRT (do Inglês Rapidly-exploring Random Trees) é das abordagens probabilísticas mais populares aplicadas ao problema do planeamento da trajetória e foi, primeiramente, introduzida por LaValle (1998).
Vahrenkamp et al. (2009), apresentaram um método computacionalmente efi-ciente para o planeamento de movimentos bimanuais, combinando o processo da cinemática inversa (IK), para determinar a configuração das juntas dos braços do robô para uma dada posição, com o método de planeamento de trajetórias proba-bilístico - RRT, para determinar um movimento livre de colisões. Os movimentos
bimanuais abordados foram, especialmente, os de agarrar um objeto (em Inglês grasp) ou repassar o objeto para outra mão (em Inglês conhecido como re-grasp) sem colidir com nenhum obstáculo em todo o espaço de trabalho do robô. As capacidades da combinação dos métodos IK com o planeamento baseado na RRT, foram demonstra-das tanto num ambiente de simulação como num ambiente real de cozinha com o robô ARMAR-III. Os tempos de computação respetivos a cada método estão apresentados na tabela 2.1:
Tabela 2.1: Resultados do desempenho do método de planeamento de movimentos bimanuais
IK-RRT nos testes do robô ARMAR III num cenário real de cozinha (retirado de (Vahrenkamp et al., 2009)).
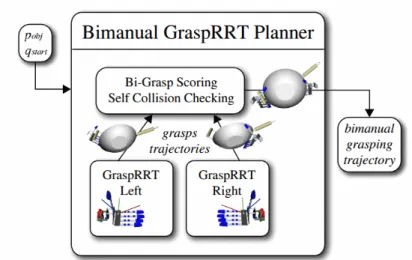
Posteriormente, este trabalho foi estendido de forma a integrar o planeamento de grasp e o planeamento de movimento (Vahrenkamp et al., 2010), combinando o processo de seleção da melhor configuração para agarrar o objeto com o processo de seleção da melhor trajetória livre de colisões para os dois braços. Como resultado desta combinação é introduzido o processo chamado de Grasp-RRT (ver figura 2.3). Neste processo, dois processos separados e independentes, um para cada mão, dão início simultaneamente, com o objetivo de encontrar duas posturas apropriadas: uma para o braço direito e outra para o esquerdo, de forma a que o robô consiga agarrar o objeto em causa, e assim, obter duas trajetórias livres de colisões, que levem até essa postura. Este processo está configurado para procurar e armazenar todas as posturas e as correspondentes trajetórias, que se encontrem adequadas ao problema em causa, até a thread principal mandar terminar. Assim que termina, são recolhidas todas as posturas e trajetórias armazenadas e o sistema de planeamento tem agora a função de calcular a melhor configuração para os braços e correspondentes trajetórias,
calculando um índice de qualidade para cada combinação de postura-trajetória dos dois braços. Consequentemente, se o índice calculado ultrapassa um determinado
threshold, então, segue-se uma verificação de colisão. Finalmente, se não forem
detetadas nenhumas colisões, esta combinação de postura-trajetória para os dois braços é retornada e executada.
Figura 2.3: Visão geral do processo de planeamento bimanual - Grasp-RRT (retirado de
(Vahrenkamp et al., 2010)).
Embora, Vahrenkamp et al. (2009) e Vahrenkamp et al. (2010) tenham apresen-tado razoáveis bons resulapresen-tados, nomeadamente, na solução do problema para alguns movimentos bimanuais de agarrar objetos. É um facto que este método baseado no algoritmo RRT falha quando aplicado num ambiente dinâmico, pois não está preparado para se readaptar, em tempo-real, a mudanças no cenário. Efetivamente, investigadores ainda estão à procura de um sistema que consiga lidar com tarefas dinâmicas sob súbitas perturbações.
Além do mais, a utilização de métodos probabilísticos têm uma desvantagem, geralmente reconhecida na criação de trajetórias para os dois braços, pois o facto de ser probabilístico pode gerar movimentos não naturais e estranhos para o humano, como descrito em Zacharias et al. (2011).
2.2.1.2 Método Baseado em Comportamentos
Uma abordagem completamente diferente da anterior foi introduzida por Edsinger and Kemp (2008). Neste trabalho é apresentado um método de controlo baseado com comportamentos (em Inglês behaviour-based approach) que permite ao robô humanoide Domo ajudar uma pessoa a colocar objetos numa prateleira. Esta técnica foi inicialmente estudada para um só braço robótico e, posteriormente, estendida para os dois braços. Basicamente, o sistema robótico tem uma série de comportamentos pré-codificados e, consoante a situação um desses comportamentos é escolhido. O parceiro humano pode compor a tarefa usando quatro possíveis comportamentos (ver figura 2.4), cada comportamento tem um respetivo sinal de voz (comando:
VocalRequest). O humano pode pedir um desses comportamentos enquanto o robô
monitoriza a pessoa no cenário (respetivos comandos: PersonSeek, PersonDetetc).
Figura 2.4: Modelo baseado no comportamento (retirado de (Edsinger and Kemp, 2008)).
Esta abordagem reúne vantagens na medida em que permite um melhor e específico feedback atendendo à situação em que se encontra a interação entre o humano e o robô. No entanto, uma desvantagem clara desta abordagem é o facto de se ter que implementar cada comportamento que se deseje ver realizado pelo robô.
Contudo e tal como os métodos probabilísticos (ver ponto 2.2.1.1), este método, baseado em comportamentos ou amostras apresenta o mesmo problema atendendo à geometria da trajetória, pois pode ser imprevisível e estranha. Assim sendo, em Zacharias et al. (2011) este problema da geração de trajetórias human-like
é considerado. Os autores afirmam que a escolha de uma configuração
human-like para os dois braços, inicial e final, afeta fortemente o grau de human-human-likeness
do caminho planeado. Além do mais, não é tido em conta o aspeto temporal (velocidade e aceleração) do movimento. É um facto de que para aceitar e perceber os movimentos bimanuais como semelhantes aos dos realizados pelos humanos, é importante considerar aspetos como a velocidade dos movimentos dos dois braços e as suas interdependências (Schaal, 2007; Duffy, 2003).
2.2.1.3 Programação por Demonstração
A programação por demonstração, também conhecida como a aprendizagem por imitação, tem sido uma abordagem usada para dar capacidade ao robô de aprender novas ações apenas pela observação do comportamento e movimentos de uma pessoa. Assim sendo, este método aborda o problema da geração de movimentos human-like por parte de um robô antropomórfico, capturando caraterísticas de coordenação tem-porais e espaciais da manipulação bimanual humana. Seguidamente são apresentados três trabalhos relativos a esta área.
Começando pelo trabalho de Zöllner et al. (2004), estes propuseram um sistema baseado na programação por demonstração (em Inglês Programming by Demonstration - PbD), a fim de dotar uma plataforma robótica humanoide com a capacidade de observar, aprender e executar tarefas geralmente feitas por humanos. A figura 2.5 ilustra todo o ciclo PbD, este permite a transferência do conhecimento da tarefa humana para o robô através da extração de informação. Além do mais, este ciclo destina-se a assegurar que a representação percebida pelo processo de aprendizagem é aplicável a outros robôs. Basicamente, este ciclo de programação por demonstração (proposta neste artigo) é composto por uma etapa inicial de perceção e interpretação, de forma a extrair o máximo de informação possível a partir da tarefa de demonstração. O passo seguinte, a generalização, ou seja, transformar toda a informação recolhida numa representação generalizada e resumida, de forma a ser aplicável ao robô. Por último, mapear a tarefa e transferir as trajetórias para o robô específico.
Figura 2.5: Esquema do ciclo de programação por demonstração: da demonstração humana
à execução robótica (retirado de (Zöllner et al., 2004)).
Porém, falta referir que para o controlo da execução de tarefas bimanuais coordenadas foi desenvolvido um modelo Petri Net. Além disso, é importante notar que este método preserva a estrutura da tarefa, devido à sua generalização, mas carece de flexibilidade. Deste modo não permite ao sistema se adaptar a mudanças no cenário, especialmente, no caso de complexas tarefas de manipulação bimanual. De notar, que esta proposta de programação por demonstração foi validada com a tarefa bimanual de abrir um frasco.
Posteriormente, em Asfour et al. (2008) é introduzido um modelo baseado no
Hidden Markov Model (HMM) para aprendizagem por imitação dos movimentos
dos braços humanos para um robô humanoide. Essencialmente, o processo consiste em criar contínuos HMMs a partir da demonstração dos movimentos bimanuais pretendidos, executados por várias vezes. Estes modelos são treinados tendo em conta os traços caraterísticas do movimento, ou pontos chave de cada demonstração. Assim, apenas são considerados e usados para a reprodução do movimento, os pontos chave presentes em todas ou quase todas as demonstrações, os chamados de pontos chave comuns. Asfour e os seus colegas também demonstraram a capacidade da