Por
Paulo Daniel Azevedo Botelho
Orientador: Doutor Carlos Manuel Jos´
e Alves Serˆ
odio
Coorientador: Doutor Pedro Miguel Mestre Alves Silva
Disserta¸c˜ao submetida `a
UNIVERSIDADE DE TR ´AS-OS-MONTES E ALTO DOURO para obten¸c˜ao do grau de
MESTRE
em Engenharia Electrot´ecnica e de Computadores, de acordo com o disposto no DR – I s´erie – No151, Decreto-Lei n.o 115/2013 de 7 de Agosto e no
Regulamento de Estudos Conducente ao Grau de Mestre da UTAD DR, 2.a s´erie – No149 de 4 de Agosto de 2011
Por
Paulo Daniel Azevedo Botelho
Orientador: Doutor Carlos Manuel Jos´
e Alves Serˆ
odio
Coorientador: Doutor Pedro Miguel Mestre Alves Silva
Disserta¸c˜ao submetida `a
UNIVERSIDADE DE TR ´AS-OS-MONTES E ALTO DOURO para obten¸c˜ao do grau de
MESTRE
em Engenharia Electrot´ecnica e de Computadores, de acordo com o disposto no DR – I s´erie – No151, Decreto-Lei n.o 115/2013 de 7 de Agosto e no
Regulamento de Estudos Conducente ao Grau de Mestre da UTAD DR, 2.a s´erie – No149 de 4 de Agosto de 2011
Doutor Carlos Manuel Jos´e Alves Serˆodio
Professor Associado com Agrega¸c˜ao do
Departamento de Engenharias da Escola de Ciˆencias de Tecnologia Universidade de Tr´as-os-Montes e Alto Douro
Doutor Pedro Miguel Mestre Alves Silva
Professor Auxiliar do
Departamento de Engenharias da Escola de Ciˆencias de Tecnologia Universidade de Tr´as-os-Montes e Alto Douro
Nikola Tesla (1856 – 1943)
A quem dedico, Fam´ılia
Submetido na Universidade de Tr´as-os-Montes e Alto Douro para o preenchimento dos requisitos parciais para obten¸c˜ao do grau de
Mestre em Engenharia Eletrot´ecnica e de Computadores
Resumo — Os Servi¸cos Baseados em Localiza¸c˜ao s˜ao definidos como sendo servi¸cos que utilizam a localiza¸c˜ao geogr´afica de um terminal. O utilizadores destes servi¸cos podem pretender obter conhecimento sobre servi¸cos pr´oximos ou sobre a sua pr´opria localiza¸c˜ao ao n´ıvel da rua, cidade, coordenadas geogr´aficas, etc. ou relativa a ou-tros utilizadores. Os sinais de sat´elite, e.g. os usados pelo GPS (Global Positioning
System), s˜ao severamente degradados quando os terminais se encontram em ambi-entes interiores (indoor). Neste tipo de ambiambi-entes, uma das t´ecnicas mais utilizadas ´
e recorrer `a an´alise do sinal das redes de comunica¸c˜oes sem fios j´a existente no local, quando n˜ao existe uma infraestrutura complementar ao sistema de localiza¸c˜ao. Ha-bitualmente, estas t´ecnicas consistem em an´alise de cena por fingerprinting ou com base em modelos de propaga¸c˜ao. Os requisitos de precis˜ao em ambientes indoor s˜ao, geralmente, mais elevados. Caso n˜ao exista uma infraestrutura sem fios, o recurso a sensores IMU (Inertial Measurement Units) pode ser o ´unico modo de determinar a localiza¸c˜ao de um indiv´ıduo em ambientes interiores, desde que a posi¸c˜ao inicial seja conhecida. A estimativa da localiza¸c˜ao com estes sensores, tem como base o comportamento corporal do utilizador ao longo da sua caminhada. Os sensores IMU permitem detetar passos humanos em certas condi¸c˜oes e, com a orienta¸c˜ao do utilizador, prever o seu percurso. Neste trabalho ´e estudada a possibilidade de implementa¸c˜ao de um sistema de localiza¸c˜ao indoor baseado na biomecˆanica dos movimentos dos utilizadores.
Palavras Chave: Localiza¸c˜ao, Indoor, Dead Reckoning, Sistema, Navega¸c˜ao, Pe-destre, Orienta¸c˜ao, Seguimento
Submitted to the University of Tr´as-os-Montes and Alto Douro in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering and Computers
Abstract — Location Based Services (LBS) are defined as services that use the
geographic localization of terminals. Users of these services may wish to know about nearby services or their own localization at a street or city level, geographical co-ordinates, etc. or related to other users. Satellite signals e.g., those used by GPS (Global Positioning System) are severely degraded when the terminals are in in-door environments. In such environments, the most common technique is to analyse the signal of the wireless communications network locally present, when there is no additional infrastructure dedicated for the localization system. Usually, these techniques consist of scene analysis by fingerprinting or using propagation models. The precision requirements in indoor environments are, usually, higher. If there is not a wireless infrastructure, the use of IMU (Inertial Measurement Units) sensors may be the only way to estimate the localization of individuals indoors, provided that the initial position is known. The estimation of localizations with these sensors is based on the user’s body behavior throughout his walking. The IMU sensors can identify human steps on certain conditions and with the orientation informa-tion of the users, predict their path. In this work, the possibility of implementing an indoor tracking system based on the biomechanics of the users’ motion is studied.
Key Words: Localization, Indoor, Dead Reckoning, Pedestrian, Navigation,
Sys-tem, Orientation-Aware, Tracking
Aos meus orientadores, Professores Doutores Carlos Manuel Jos´e Alves Serˆodio e Pedro Miguel Mestre Alves da Silva por toda a paciˆencia, disponibilidade, mo-tiva¸c˜ao, observa¸c˜oes e orienta¸c˜oes na execu¸c˜ao deste trabalho e no restante percurso acad´emico.
Ao Active Gym UTAD e seus colaboradores pela disponibilidade e esclarecimentos prestados, bem como no uso das respetivas instala¸c˜oes.
Ao ´Alvaro Almeida pelas suas explica¸c˜oes t´ecnicas. `
A D. Elisabete pela disponibilidade, paciˆencia e esclarecimentos.
A todos os meus colegas do Mestrado em Engenharia Eletrot´ecnica e de Computado-res da Universidade de Tr´as-os-Montes e Alto Douro, em especial ao Diogo Valente, Jos´e Valente, Rui Pinto, Lu´ıs Coutinho, Rui Guedes, Christophe Teixeira, Artur Martins, Hugo Pereira, Guilhermino Pereira e Hugo Fernandes.
A todos, um sincero obrigado!
UTAD, Paulo Daniel Azevedo Botelho
Vila Real, 2016
Resumo ix
Abstract xi
Agradecimentos xiii
´Indice de tabelas xix
´Indice de figuras xxiii
Acr´onimos e abreviaturas xxxi
1 Introdu¸c˜ao 1
1.1 Motiva¸c˜ao e Objetivos . . . 5
1.2 Contribui¸c˜ao . . . 7
1.3 Organiza¸c˜ao da Disserta¸c˜ao . . . 8
2 Sistemas de Localiza¸c˜ao 11 2.1 Carater´ısticas de um Sistema de Localiza¸c˜ao . . . 11
2.2 Metodologias de Localiza¸c˜ao . . . 15
2.2.1 Localiza¸c˜ao usando Triangula¸c˜ao . . . 15
2.2.2 Localiza¸c˜ao usando Proximidade . . . 16
2.2.3 Localiza¸c˜ao usando An´alise de Cena . . . 16
2.2.4 Triangula¸c˜ao . . . 17
2.2.5 Proximidade . . . 24
2.3.1 Precis˜ao . . . 31 2.3.2 Fiabilidade . . . 31 2.3.3 Latˆencia . . . 32 2.3.4 Disponibilidade . . . 32 2.3.5 Aplicabilidade . . . 32 2.4 Trabalhos Relacionados . . . 33
2.4.1 Global Position System . . . 33
2.4.2 RADAR . . . 34
2.4.3 SmartFloor . . . 36
2.4.4 Indoor Atlas . . . 36
2.4.5 Algoritmos de An´alise Biomecˆanica . . . 37
3 Dete¸c˜ao e Carateriza¸c˜ao de Passos 43 3.1 Biomecˆanica da Caminhada Humana . . . 46
3.2 Dete¸c˜ao de Passos . . . 48
3.2.1 Zero–crossing . . . 49
3.2.2 Mean–crossing . . . 51
3.2.3 Valores M´aximos . . . 52
3.2.4 Frequˆencia . . . 53
3.2.5 Reconhecimento de Padr˜oes . . . 55
3.3 Estima¸c˜ao de Comprimento de Passos . . . 57
3.4 Orienta¸c˜ao do Utilizador . . . 60
3.5 Problemas de um Pedestrain Navigation System . . . 61
4 An´alise e Processamento de Sinais 63 4.1 Tipos de Sinais . . . 63
4.2 Frequˆencia e Per´ıodo Fundamental . . . 65
4.3 Dom´ınio do Tempo . . . 65
4.4 Dom´ınio da Frequˆencia . . . 66
4.4.1 Decomposi¸c˜ao em Frequˆencia . . . 67
4.5 Dom´ınio da Escala . . . 67
4.6 Amostragem, Interpola¸c˜ao e Filtragem . . . 68
4.6.1 Interpola¸c˜ao . . . 69
4.6.2 Filtragem Digital . . . 70
4.7 An´alise Tempo–Frequˆencia . . . 71
4.7.1 Short-Time Fourier Transform (STFT) . . . 71
4.7.2 Wavelet Transform . . . 72
5 Parametriza¸c˜ao e Otimiza¸c˜ao de M´etodos de Navega¸c˜ao Pedestre 81
5.1 An´alise dos Dados do Aceler´ometro e da B´ussola . . . 82
5.1.1 Frequˆencia Fundamental dos Dados Adquiridos . . . 84
5.2 M´etodos de Dete¸c˜ao de Passos . . . 90
5.2.1 Interse¸c˜oes . . . 90
5.2.2 Valores M´aximos ou M´ınimos . . . 98
5.2.3 Frequˆencia Fundamental . . . 101
5.3 M´etodos de Estima¸c˜ao da Distˆancia Percorrida . . . 102
5.4 Processamento de Dados . . . 106
5.4.1 Filtragem Digital . . . 107
5.4.2 Upsampling . . . 107
5.5 Apresenta¸c˜ao Geral do Sistema Proposto . . . 107
5.6 Aplica¸c˜ao M´ovel de Grava¸c˜ao de Dados . . . 110
5.7 Estima¸c˜ao Unidimensional da Localiza¸c˜ao . . . 112
5.7.1 Gest˜ao de Dados . . . 113
5.7.2 Gest˜ao de Processos . . . 114
6 Testes e Resultados 121 6.1 An´alise dos M´etodos de Dete¸c˜ao de Passos . . . 125
6.1.1 Discuss˜ao dos Resultados da Dete¸c˜ao de Passos . . . 136
6.2 An´alise dos M´etodos de Estima¸c˜ao da Distˆancia Percorrida . . . 139
6.2.1 Discuss˜ao dos Resultados da Estima¸c˜ao de Distˆancia Percorrida146 6.3 An´alise dos Algoritmos de Determina¸c˜ao da Frequˆencia Fundamental 148 6.3.1 Discuss˜ao dos Resultados da Determina¸c˜ao da Frequˆencia . . . 154
6.4 An´alise dos M´etodos de Processamento de Dados . . . 155
6.4.1 Filtragem . . . 155
6.4.2 Upsampling . . . 159
6.5 S´ıntese dos Resultados Obtidos . . . 162
7 Conclus˜oes e Trabalho Futuro 167 7.1 Trabalho Futuro . . . 169
7.1.1 Dete¸c˜ao de Passos . . . 170
7.1.2 Estima¸c˜ao da Distˆancia Percorrida . . . 170
7.1.3 Algoritmos de Determina¸c˜ao de Frequˆencia . . . 171
7.1.4 Estima¸c˜ao da Localiza¸c˜ao em Duas Dimens˜oes . . . 171
7.1.5 Estima¸c˜ao da Localiza¸c˜ao em Trˆes Dimens˜oes . . . 172
2.1 Classes e respetivos exemplos de tipos de ambientes . . . 32
5.1 Parˆametros de alguns m´etodos de dete¸c˜ao de passos . . . 101 5.2 Compara¸c˜ao da velocidade da passadeira, comprimento do passo e
frequˆencia de passos de um utilizador . . . 104
6.1 Carater´ısticas das amostras reais . . . 124 6.2 Carater´ısticas das amostras da passadeira . . . 125 6.3 Resultados da estima¸c˜ao do n´umero de passos realizados em
ambien-tes interiores . . . 126 6.4 Resultados da estima¸c˜ao do n´umero de passos atrav´es da frequˆencia
fundamental . . . 127 6.5 Resultados da aplica¸c˜ao de m´etodos de dete¸c˜ao de passos em escadas 128 6.6 Resultados da aplica¸c˜ao de m´etodos de dete¸c˜ao de passos em dados
adquiridos na passadeira . . . 129 6.7 Resultados da aplica¸c˜ao do m´etodo de dete¸c˜ao de passos atrav´es
frequˆencia em dados adquiridos na passadeira . . . 130 6.8 Resultados baseada em amostras processadas capturadas em
ambien-tes interiores durante caminhadas . . . 131
6.10 Resultados da estima¸c˜ao do n´umero de passos atrav´es da frequˆencia das amostras processadas adquiridas na passadeira . . . 132 6.11 Resultados baseada em amostras processadas adquiridas em escadas . 133 6.12 Resultados da dete¸c˜ao de passos amostras processadas adquiridas na
passadeira . . . 134 6.13 Resultados m´edios dos m´etodos de dete¸c˜ao de passos realizados,
apli-cados a amostras processados e reais . . . 135 6.14 Resultados dos m´etodos de dete¸c˜ao de passos antes e depois da aplica¸c˜ao
do processamento de filtragem e upsampling . . . 136 6.15 Resultados da aplica¸c˜ao do m´etodo de estima¸c˜ao da distˆancia
percor-rida atrav´es do uso da frequˆencia fundamental . . . 139 6.16 Resultados da estima¸c˜ao da distˆancia percorrida com base na estatura
do utilizador . . . 140 6.17 Tabela de resultados da estima¸c˜ao da distˆancia percorrida com base
na estatura do utilizador e na frequˆencia . . . 140 6.18 Resultados da estima¸c˜ao da distˆancia percorrida com base na variˆancia
e na frequˆencia . . . 141 6.19 Resultados da aplica¸c˜ao do m´etodo de estima¸c˜ao da distˆancia
percor-rida atrav´es do uso da frequˆencia (passadeira) . . . 141 6.20 Resultados da estima¸c˜ao da distˆancia percorrida com base na estatura
do utilizador (passadeira) . . . 142 6.21 Resultados da estima¸c˜ao da distˆancia percorrida com base na estatura
do utilizador e na frequˆencia (passadeira) . . . 142 6.22 Resultados da estima¸c˜ao da distˆancia . . . 143 6.23 Resultados da aplica¸c˜ao do m´etodo de estima¸c˜ao da distˆancia
percor-rida atrav´es do uso da frequˆencia fundamental (amostras processadas) 144 6.24 Resultados da estima¸c˜ao da distˆancia percorrida com base na estatura
do utilizador e na frequˆencia (amostras processadas) . . . 144
processadas) . . . 145 6.26 Resultados da estima¸c˜ao da distˆancia percorrida com base na estatura
do utilizador e na frequˆencia (passadeira e amostras processadas) . . 145 6.27 Tabela resumo dos resultados de alguns m´etodos de estima¸c˜ao
(amos-tras processadas) . . . 146 6.28 Performance dos algoritmos de dete¸c˜ao de frequˆencia . . . 149 6.29 Resultados da aplica¸c˜ao dos v´arios algoritmos de determina¸c˜ao da
frequˆencia fundamental . . . 151 6.30 Resultados da aplica¸c˜ao dos v´arios algoritmos de determina¸c˜ao da
frequˆencia fundamental (sinal processado) . . . 152 6.31 Resumo dos resultados da aplica¸c˜ao dos v´arios algoritmos de
deter-mina¸c˜ao da frequˆencia fundamental (sinal processado) . . . 153 6.32 Aplica¸c˜ao de filtros . . . 156 6.33 Aplica¸c˜ao de filtros (tempo de execu¸c˜ao) . . . 157 6.34 Tabela de altera¸c˜ao de carater´ısticas dos dados reais devido `a aplica¸c˜ao
de upsampling baseada nos resultados gr´aficos. . . 159 6.35 Carater´ısticas dos dados pr´e e p´os-processamento . . . 161 6.36 Performance esperada do sistema . . . 165
2.1 Latera¸c˜ao Circular . . . 17 2.2 Latera¸c˜ao Hiperb´olica . . . 18 2.3 Exemplo da utiliza¸c˜ao da t´ecnica de angula¸c˜ao . . . 23 2.4 Sistema de localiza¸c˜ao baseada na C´elula de Origem . . . 25 2.5 Sistema RFID . . . 26 2.6 Algoritmo Markless - Dete¸c˜ao . . . 27 2.7 Algoritmo Markless - Reconhecimento . . . 27 2.8 Tracking de Pessoas com o Algoritmo Markless . . . 28 2.9 Fingerprint Map . . . 29 2.10 Constela¸c˜ao GPS . . . 34 2.11 C´elula SmartFloor e Sensor de Press˜ao . . . 36 2.12 Dete¸c˜ao de passos atrav´es de zero–crossing . . . 38 2.13 Dete¸c˜ao de passos e estima¸c˜ao dos seus comprimentos . . . 39 2.14 Dete¸c˜ao do comportamento e de passos e estima¸c˜ao dos seus
compri-mentos . . . 40 2.15 Trajet´oria percorrida pelo utilizador estimada pelo sistema . . . 41
3.1 Ilustra¸c˜ao da cria¸c˜ao da anima¸c˜oes da caminhada humana . . . 46
e alturas durante as duas fases da caminhada . . . 48 3.4 Simula¸c˜ao da utiliza¸c˜ao de Zero–crossing com dados cont´ınuos . . . . 49 3.5 Simula¸c˜ao da utiliza¸c˜ao de Zero–crossing com dados discretos . . . . 50 3.6 Simula¸c˜ao da utiliza¸c˜ao de Zero–crossing com dados reais de um eixo
do aceler´ometro . . . 50 3.7 Simula¸c˜ao da utiliza¸c˜ao de Mean–crossing com dados reais do
ace-ler´ometro . . . 51 3.8 Simula¸c˜ao da utiliza¸c˜ao de Mean–crossing com dados reais do
ace-ler´ometro . . . 52 3.9 M´etodo de dete¸c˜ao de passos atrav´es de valores m´aximos . . . 53 3.10 Fases t´ıpicas da caminhada humana . . . 56 3.11 Padr˜ao t´ıpico de dados do aceler´ometro durante um passo . . . 56 3.12 Frequˆencia determinada atrav´es da Short-Time Fourier Transform . . 58
4.1 Processo de aquisi¸c˜ao de dados de um sistema digital . . . 64 4.2 Exemplo de um eletrocardiograma . . . 66 4.3 Amostragem de uma sinusoide com base em diferentes frequˆencias de
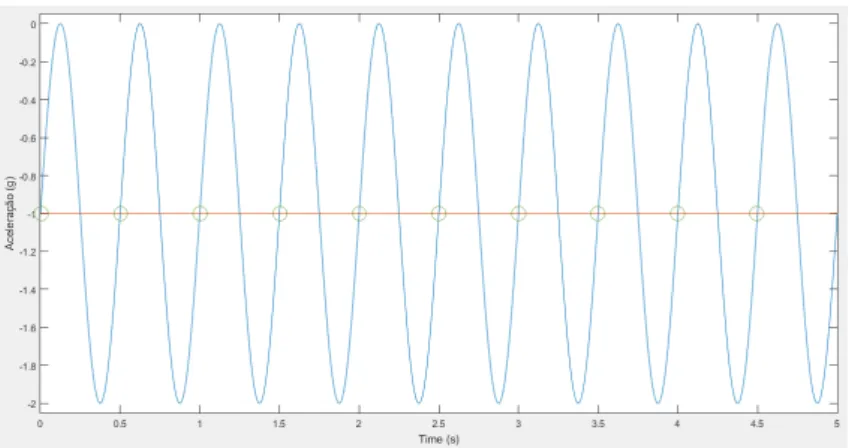
amostragem . . . 69 4.4 Sinal sinusoidal de frequˆencia 1 Hz e espetro de frequˆencias obtido
atrav´es da DFT . . . 74 4.5 Dois sinais sinusoidais de frequˆencias 1 Hz e 5 Hz e espetro de frequˆencias
obtido atrav´es da DFT . . . 74 4.6 Espetro de frequˆencias obtido atrav´es da aplica¸c˜ao da DFT e
respe-tivos picos . . . 75 4.7 Aplica¸c˜ao da STFT a um sinal com frequˆencia vari´avel . . . 77 4.8 Aplica¸c˜ao da Wavelet Transform a um sinal com frequˆencia vari´avel . 78 4.9 Correspondˆencia entre a frequˆencia e a escala usando a Wavelet m˜ae
morl . . . 78
4.10 Aplica¸c˜ao da Hilbert Transform a um sinal com frequˆencia vari´avel . 78
4.12 Resultado da Wavelet Transform aplicada a um sinal cuja frequˆencia est´a a aumentar linearmente . . . 79 4.13 Resultado da Hilbert Transform aplicada a um sinal cuja frequˆencia
est´a a aumentar linearmente . . . 80
5.1 Amostras de um caminhada . . . 82 5.2 Amostras de um caminhada (azul); interpola¸c˜ao linear (vermelho) . . 82 5.3 Aplica¸c˜ao de upsampling em amostras de um caminhada . . . 83 5.4 Dados originais captados pela b´ussola digital . . . 84 5.5 Locomo¸c˜ao em escadas . . . 84 5.6 M´etodo de determina¸c˜ao manual da frequˆencia fundamental . . . 85 5.7 Resultado da aplica¸c˜ao do m´etodo de determina¸c˜ao manual da frequˆencia 86 5.8 Resultado da aplica¸c˜ao de filtragem digital e respetiva frequˆencia
fun-damental . . . 86 5.9 Resultado da aplica¸c˜ao de filtragem digital e respetiva frequˆencia
fun-damental (passadeira) . . . 88 5.10 Corrida em passadeira a motor (TRD) vs. a solo (OVG) . . . 89 5.11 Setup da aquisi¸c˜ao de amostras e filmagem da caminhada na passadeira 89 5.12 Caminha normal vs. em passadeira . . . 90 5.13 Fluxograma geral da aplica¸c˜ao da dete¸c˜ao de passos baseada em
in-terse¸c˜oes . . . 91 5.14 Aplica¸c˜ao gr´afica da t´ecnica de zero–crossing; sinal (azul); threshold
(vermelho) . . . 92 5.15 Aplica¸c˜ao gr´afica da t´ecnica de zero–crossing; sinal (azul); threshold
(verde); bandas de histerese (vermelho) . . . 92 5.16 Aplica¸c˜ao gr´afica da t´ecnica de zero–crossing; sinal (azul); threshold
(verde); bandas de histerese (vermelho) . . . 93 5.17 Aplica¸c˜ao gr´afica da t´ecnica de Mean–crossing 1, sinal (azul),
th-reshold (verde), bandas de histerese (vermelho) . . . 96
5.19 Aplica¸c˜ao gr´afica da t´ecnica de Mean–crossing 3, sinal (azul),
th-reshold (verde), bandas de histerese (vermelho) . . . 97 5.20 Aplica¸c˜ao gr´afica da t´ecnica Valores M´aximos 1, sinal (azul); threshold
(cor-de-rosa) . . . 99 5.21 Aplica¸c˜ao gr´afica da t´ecnica Valores M´aximos 2, sinal (azul); threshold
(cor-de-rosa) . . . 99 5.22 Aplica¸c˜ao gr´afica da t´ecnica Valores M´ınimos 1, sinal (azul); threshold
(cor-de-rosa) . . . 100 5.23 Aplica¸c˜ao gr´afica da t´ecnica Valores M´ınimos 2, sinal (azul); threshold
(cor-de-rosa) . . . 100 5.24 M´etodo de determinar o comprimento do passo . . . 102 5.25 M´etodo de determinar o comprimento do passo na passadeira . . . 103 5.26 Arquitetura base do sistema proposto . . . 108 5.27 Fluxograma da aquisi¸c˜ao de dados . . . 111 5.28 Aplica¸c˜ao m´ovel de captura de dados. . . 112 5.29 Fluxograma relativo `a dete¸c˜ao e estima¸c˜ao do comprimento de passos 115 5.30 Fluxograma relativo ao processamento de dados . . . 116 5.31 Fluxograma relativo `a intera¸c˜ao do processamento com a gest˜ao de
dados . . . 117 5.32 Prot´otipo da aplica¸c˜ao m´ovel do sistema proposto a ser testada em
modo debug . . . 118 5.33 Prot´otipo da aplica¸c˜ao m´ovel do sistema proposto . . . 119
6.1 Sinal com ru´ıdo (topo); sinal processado (base) . . . 150 6.2 Fourier Transform vs. Hilbert Transform (janela de 1 segundo) . . . . 153
6.3 Resposta em frequˆencia dos filtros Chebyshev e Butterworth . . . 157 6.4 Filtro Butterwoth; resposta em fase (vermelho); resposta em frequˆencia
(azul) . . . 158 6.5 Resultado da aplica¸c˜ao de upsampling baseada em splines . . . 160 6.6 Amostras originais e processadas . . . 161
A.2 Resultado gr´afico da aplica¸c˜ao do filtro de m´edia com uma janela de 4 pontos . . . 186 A.3 Resultado gr´afico da aplica¸c˜ao do filtro de m´edia com uma janela de
5 pontos . . . 187 A.4 Resultado gr´afico da aplica¸c˜ao do filtro Butterworth de terceira ordem
com frequˆencia de corte 7 Hz . . . 187 A.5 Resposta em frequˆencia e em fase do filtro Butterwoth com frequˆencia
de corte 7 e ordem 3 . . . 188 A.6 Resultado gr´afico da aplica¸c˜ao do filtro Butterworth de terceira ordem
com frequˆencia de corte 10 Hz . . . 188 A.7 Resposta em frequˆencia e em fase do filtro Butterwoth com frequˆencia
de corte 10 e ordem 3 . . . 189 A.8 Resultado gr´afico da aplica¸c˜ao do filtro Butterworth de terceira ordem
com frequˆencia de corte 14 Hz . . . 190 A.9 Resposta em frequˆencia e em fase do filtro Butterwoth com frequˆencia
de corte 14 e ordem 3 . . . 190 A.10 Resultado gr´afico da aplica¸c˜ao do filtro Butterworth de sexta ordem
com frequˆencia de corte 7 Hz . . . 191 A.11 Resposta em frequˆencia e em fase do filtro Butterwoth com frequˆencia
de corte 7 e ordem 6 . . . 191 A.12 Resultado gr´afico da aplica¸c˜ao do filtro Butterworth de sexta ordem
com frequˆencia de corte 10 Hz . . . 192 A.13 Resposta em frequˆencia e em fase do filtro Butterwoth com frequˆencia
de corte 10 e ordem 6 . . . 192 A.14 Resultado gr´afico da aplica¸c˜ao do filtro Butterworth de sexta ordem
com frequˆencia de corte 14 Hz . . . 193 A.15 Resposta em frequˆencia e em fase do filtro Butterwoth com frequˆencia
de corte 14 e ordem 6 . . . 193
A.17 Resposta em frequˆencia e em fase do filtro Chebyshev com frequˆencia de corte 7 e ordem 3 . . . 194 A.18 Resultado gr´afico da aplica¸c˜ao do filtro Chebyshev de terceira ordem
com frequˆencia de corte 10 Hz. . . 195 A.19 Resposta em frequˆencia e em fase do filtro Chebyshev com frequˆencia
de corte 10 e ordem 3 . . . 195 A.20 Resultado gr´afico da aplica¸c˜ao do filtro Chebyshev de terceira ordem
com frequˆencia de corte 14 Hz. . . 196 A.21 Resposta em frequˆencia e em fase do filtro Chebyshev com frequˆencia
de corte 14 e ordem 3. . . 197 A.22 Resultado gr´afico da aplica¸c˜ao do filtro Chebyshev de sexta ordem
com frequˆencia de corte 7 Hz . . . 197 A.23 Resposta em frequˆencia e em fase do filtro Chebyshev com frequˆencia
de corte 7 e ordem 6 . . . 198 A.24 Resultado gr´afico da aplica¸c˜ao do filtro Chebyshev de sexta ordem
com frequˆencia de corte 10 Hz . . . 198 A.25 Resposta em frequˆencia e em fase do filtro Chebyshev com frequˆencia
de corte 10 e ordem 6 . . . 199 A.26 Resultado gr´afico da aplica¸c˜ao do filtro Chebyshev de sexta ordem
com frequˆencia de corte 14 Hz . . . 199 A.27 Resposta em frequˆencia e em fase do filtro Chebyshev com frequˆencia
de corte 14 e ordem 6 . . . 200 A.28 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 1 com base na fam´ılia de wavelets DMeyer . . . 201 A.29 Resposta em frequˆencia e em fase da decomposi¸c˜ao em frequˆencia
com base na fam´ılia de wavelets DMeyer . . . 201 A.30 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 1 com base na fam´ılia de wavelets Daubechies . . . 202
A.32 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de n´ıvel 1 com base na fam´ılia de wavelets Symlets . . . 203 A.33 Resposta em frequˆencia e em fase da decomposi¸c˜ao em frequˆencia
com base na fam´ılia de wavelets Symlets . . . 203 A.34 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 1 com base na fam´ılia de wavelets Coiflets. . . . 204 A.35 Resposta em frequˆencia e em fase da decomposi¸c˜ao em frequˆencia
com base na fam´ılia de wavelets Coiflets . . . 204 A.36 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 1 com base na fam´ılia de wavelets BiorSplines . . . 205 A.37 Resposta em frequˆencia e em fase da decomposi¸c˜ao em frequˆencia
com base na fam´ılia de wavelets BiorSplines . . . 205 A.38 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 2 com base na fam´ılia de wavelets DMeyer . . . 206 A.39 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 2 com base na fam´ılia de wavelets Daubechies . . . 206 A.40 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 2 com base na fam´ılia de wavelets Symlets . . . 207 A.41 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 2 com base na fam´ılia de wavelets Coiflets . . . 208 A.42 Resultado gr´afico da aplica¸c˜ao da decomposi¸c˜ao em frequˆencia de
n´ıvel 2 com base na fam´ılia de wavelets BiorSplines . . . 208
B.1 Resultado gr´afico da aplica¸c˜ao de upsampling linear com fator multi-plicador 10 . . . 210 B.2 Resultado gr´afico da aplica¸c˜ao de upsampling linear com fator
multi-plicador 5 . . . 210 B.3 Resultado gr´afico da aplica¸c˜ao de upsampling linear com fator
multi-plicador 10. Conjunto de dados relativo a uma caminhada normal. . . 211
B.5 Resultado gr´afico da aplica¸c˜ao de upsampling c´ubico com fator mul-tiplicador 5 . . . 212 B.6 Resultado gr´afico da aplica¸c˜ao de upsampling c´ubico com fator
mul-tiplicador 10 . . . 213 B.7 Resultado gr´afico da aplica¸c˜ao de upsampling baseado em splines com
fator multiplicador 10 num sinal sinusoidal simulado. . . 214 B.8 Resultado gr´afico da aplica¸c˜ao de upsampling baseada em splines com
fator multiplicador 5 . . . 214 B.9 Resultado gr´afico da aplica¸c˜ao de upsampling baseada em splines com
fator multiplicador 10 . . . 215
Lista de acr´
onimos
Sigla Expans˜ao
AoA Angle of Arrival
DFT Discrete Fourier transform
DR Dead Reckoning
DSTFT Discrete Short-time Fourier transform
ESA European Space Agency
FC Frequˆencia de Corte
FIFO First In, First Out
FM Fingerprint Map
GPS Global Positioning System
IMU Inertial Measurement Unit
INS Inertial Navigation System
LBS Location Based Services
LEA Location Estimation Algorithms
LORAN Long Range Navigation
OVG Overground
PNS Pedestrian Navigation System
RF Radio Frequency
RSS Received Signal Strength
RSSi Received Signal Strength Indicator
STFT Short-time Fourier transform
TDoA Time Difference of Arrival
TRD Treadmill
ToA Time of Arrival
Lista de abreviaturas
Abreviatura Significado(s)
e.g. por exemplo et al. e outros (autores) etc. etecetera, outros i.e. isto ´e, por conseguinte vid. veja-se, ver
vs. versus, por compara¸c˜ao com
1
Introdu¸c˜
ao
A necessidade do conhecimento ´e constante e permite-nos, por exemplo, deslocar at´e aos destinos pretendidos. De modo a que seja poss´ıvel deslocar-se para uma qualquer localiza¸c˜ao, ´e necess´ario conhecer ou determinar orienta¸c˜oes, percursos, distˆancias, etc, ou seja, a localiza¸c˜ao e a sua altera¸c˜ao, possuem uma dependˆencia direta de referˆencias como rios, estradas, lugares conhecidos, constru¸c˜oes, carac-ter´ısticas geol´ogicas, etc. Alguns exemplos de m´etodos cujas referˆencias podem ser obtidas pelo Homem consistem nas no¸c˜oes de georreferencia¸c˜ao (latitude e longi-tude), mapas, plantas, cartas topogr´aficas, b´ussolas e conhecimentos geogr´aficos. Ao longo da Hist´oria, foram inventados alguns instrumentos de determina¸c˜ao de localiza¸c˜oes e.g. astrol´abio, quadrante, etc. Estes instrumentos foram-se alterando, ao longo do tempo, e de igual modo, o mesmo aconteceu `as referˆencias, recursos e caracter´ısticas geogr´aficas.
Nos dias de hoje, o GPS ´e um sistema totalmente operacional que permite determi-nar a localiza¸c˜ao dos seus terminais de forma cont´ınua e precisa, a n´ıvel mundial, com equipamentos de recep¸c˜ao de sinal apropriados presentes nos terminais. As suas referˆencias utilizadas s˜ao sat´elites, sendo que ao longo dos anos foram aumentando em n´umero e em v´arias carater´ısticas tecnol´ogicas. O GPS possui um erro associado
e depende da disponibilidade dos recursos necess´arios a cada determina¸c˜ao [1].
Os primeiros instrumentos criados para a localiza¸c˜ao substitu´ıram as referˆencias ainda mais antigas, as caracter´ısticas geogr´aficas. Um deles, denomina-se astrol´abio, que por defini¸c˜ao ´e um instrumento naval cujo objetivo ´e a resolu¸c˜ao de problemas relacionados com a posi¸c˜ao das estrelas. A palavra astrol´abio tem origem em duas palavras: astron que tem como significado astro ou estrela e labein que tem como significado domar ou dominar, inferindo que, para determinar a localiza¸c˜ao de algo ou de algu´em eram usados recursos celestes. As suas origens s˜ao atribu´ıdas `a Gr´ecia antiga, o primeiro astrol´abio foi criado por Hiparco (150 a. C.). Posteriormente, este instrumento seria utilizado pelos navegadores da Idade M´edia para a determina¸c˜ao das posi¸c˜oes dos astros segundo a sua altura relativamente `a linha do horizonte, cartografia aut´onoma e calend´ario perp´etuo, com base em conceitos e f´ormulas ma-tem´aticas. Com isto, obtinham-se diversas informa¸c˜oes como distˆancias zenitais ou entre dois pontos conhecidos. O astrol´abio ficou na Hist´oria, maioritariamente, pela sua importˆancia e grau de exatid˜ao e precis˜ao de localiza¸c˜oes [2].
O astrol´abio seria mais tarde substitu´ıdo pelo quadrante que seria usado pelos na-vegadores portugueses como aux´ılio nas suas viagens pelos mares, em 1460. O quadrante usava a altura da estrela polar de modo a determinar a distˆancia entre o ponto de partida da embarca¸c˜ao e a localiza¸c˜ao atual. A evolu¸c˜ao dos instrumentos de localiza¸c˜ao continuou e em 1757 foi criado o sextante por Campbell, um oficial da marinha inglesa, o qual posteriormente haveria de ser aperfei¸coado por Tomaz God-frey. O sextante tinha como objetivo determinar a localiza¸c˜ao atrav´es da medi¸c˜ao da abertura angular na vertical entre um astro e a linha do horizonte. Considera-se que seja o s´ımbolo m´aximo da navega¸c˜ao mar´ıtima, com base no seu contributo e importˆancia hist´orica na localiza¸c˜ao de embarca¸c˜oes [2].
No in´ıcio do s´eculo XX come¸caram a ser desenvolvidos v´arios sistemas de localiza¸c˜ao baseados em radiocomunica¸c˜oes, em 1940 e 1943 os Estados Unidos dedicaram-se ao desenvolvimento do LORAN (Long Range Navigation). Este sistema de navega¸c˜ao
´
e denominado de sistema de radionavega¸c˜ao hiperb´olico por possuir como base a rece¸c˜ao de sinais modulados e sincronizados e usar a distˆancia entre as ondas, que corresponde `a diferen¸ca do tempo de propaga¸c˜ao entre duas esta¸c˜oes que ´e represen-tada por uma curva hiperb´olica. Sendo repetido este processo por outras esta¸c˜oes, s˜ao criadas as linhas de Loran atrav´es das interse¸c˜oes entre as hip´erboles. Estas interse¸c˜oes permitem ao sistema determinar o posicionamento [3]. Nos anos 70 foi substitu´ıdo pelo sistema de radionavega¸c˜ao OMEGA.
O sistema OMEGA era mais simples e mais preciso, foi desenvolvido pelas for¸cas ar-madas americanas para uso militar mas posteriormente foi usado civilmente, tornando-se o primeiro sistema de radionavega¸c˜ao de uso `a escala global. O seu funcionamento tinha por base a utiliza¸c˜ao de 8 transmissores a baixa frequˆencia distanciados a uma extens˜ao tal, que permitisse que uma esta¸c˜ao recetora em qualquer localiza¸c˜ao do globo, captasse o sinal transmitido por, pelo menos 3 transmissores, de modo a gerar uma triangula¸c˜ao. A localiza¸c˜ao era determinada atrav´es de um modelo hiperb´olico de linhas de posi¸c˜oes determinadas pela compara¸c˜ao de fase dos sinais recebidos. O fim do uso do sistema OMEGA aconteceu a 30 de Setembro de 1997, todos os sinais OMEGA deixaram de ser transmitidos, a raz˜ao deste t´ermino baseia-se na ades˜ao a sistemas com recurso a sat´elites [4].
O come¸co da ades˜ao aos sistemas com recursos a sat´elites permitiu que hoje exista o GPS, o maior e mais preciso sistema de georreferencia¸c˜ao. Desenvolvido pelo De-partamento dos Estados Unidos no ano 1973, ´e um sistema com recurso a sat´elites que fornece aos recetores as suas posi¸c˜oes de um modo cont´ınuo, ao longo do globo. Inicialmente, o GPS era unicamente para uso militar, em 1993 foi aberto `a comuni-dade civil e em 1995 considerou-se que o seu funcionamento estava completamente operacional. Os primeiros sat´elites foram lan¸cados entre 1978 e 1985. A Constela¸c˜ao GPS ´e constitu´ıda por 24 sat´elites a cerca de 20200 km de altitude ao longo de 6 planos de ´orbita com 4 sat´elites cada, existem tamb´em os sat´elites de reserva ao sistema GPS que variam entre 2 e 5 unidades. Uma ´orbita completa em torno do planeta Terra de todos os sat´elites demora cerca de 12 horas [1].
Os Estados Unidos foram pioneiros no estudo do desenvolvimento dos sistemas de lo-caliza¸c˜ao com recurso a sat´elites, de modo o obter um sistema com precis˜ao elevada, velocidade e dire¸c˜ao dos seus recetores na superf´ıcie terreste ou em voo. A Uni˜ao Europeia (UE) e a Agˆencia Espacial Europeia (ESA) desenvolveram o GALILEO, sistema de navega¸c˜ao recorrendo a sat´elites, que tem como plano funcionar em pleno em 2020, de modo a fornecer informa¸c˜oes de funcionamento a todos os europeus. O projeto do GALILEO foi criado entre 1999 e 2013 de um modo estrat´egico para ser uma oposi¸c˜ao ao GPS mas sendo inter-oper´avel com este, permitindo uma maior cobertura de sat´elites [5]. Outros exemplos de iniciativas no desenvolvimento de sistemas semelhantes s˜ao o GLONASS da R´ussia, o COMPASS da China e o IRNSS da ´India.
A hist´oria da localiza¸c˜ao baseia-se, essencialmente, em sistemas de localiza¸c˜ao de aplica¸c˜ao apenas em ambientes exteriores. Nos dias de hoje, estes sistemas encontram-se num estado avan¸cado apreencontram-sentando op¸c˜oes operacionais mundialmente. Com a an´alise dos sistemas de localiza¸c˜ao outdoor existentes, os investigadores da ´area de localiza¸c˜ao indoor s˜ao fortemente encorajados a desenvolver sistemas com os mes-mos resultados, aplicando ou n˜ao os mesmo princ´ıpios. Estes sistemas possuem, geralmente, um requisito de precis˜ao num´erica maior quando comparados com os sistemas outdoor relativamente `a escala, e ocupam um importante lugar na inves-tiga¸c˜ao acad´emica e empresarial.
Esta disserta¸c˜ao enquadra-se na ´area denominada de Sistema de Localiza¸c˜ao
In-door, na qual se fazem muitos esfor¸cos para obter resultados fi´aveis e cred´ıveis. Dos sistemas indoor, o foco principal consisto no estudo de sistemas baseados em senso-res IMU que utilizam dados biomecˆanicos dos movimentos do utilizador de modo a identificar deslocamentos.
1.1
Motiva¸
c˜
ao e Objetivos
O Homem dedica-se `a resolu¸c˜ao de problemas que v˜ao surgindo longo dos tempos, superando algumas expectativas e hoje ´e ordin´ario, o uso di´ario de ferramentas tecnol´ogicas no quotidiano da comunidade civil. Nesta ´area, h´a uma grande com-petitividade de mercado, mais recentemente na tecnologia m´ovel. Os fabricantes de dispositivos m´oveis procuram constantemente inova¸c˜oes tecnol´ogicas de modo a destacarem-se no mercado, com ˆenfase no aumento do poder computacional. Este poder permite o funcionamento eficaz de aplica¸c˜oes de alta necessidade de c´alculo, por exemplo.
Os Servi¸cos Baseados em Localiza¸c˜ao s˜ao uma ´area significativa na tecnologia m´ovel, com uma presen¸ca ub´ıqua de servi¸cos ao consumidor. Estes servi¸cos baseiam-se na localiza¸c˜ao do dispositivo m´ovel do utilizador de modo a fornecer-lhe informa¸c˜oes ou servi¸cos espec´ıficos [6]. As principais a¸c˜oes destes servi¸cos s˜ao a obten¸c˜ao da localiza¸c˜ao do utilizador e us´a-la de modo outros servi¸cos on top, como localizar objetos pr´oximos, localiza¸c˜ao do utilizador, dire¸c˜oes de modo a navegar at´e alguma localiza¸c˜ao, etc [7].
A determina¸c˜ao da localiza¸c˜ao foi, em tempos, apenas de car´acter outdoor, com referˆencia `a escala de edif´ıcios, ruas, zonas, etc. Com a evolu¸c˜ao tecnol´ogica j´a referida, ´e poss´ıvel ultrapassar as barreiras da localiza¸c˜ao em ambientes interiores, sendo j´a uma realidade com grande potencialidade de aposta e crescimento, embora com v´arios obst´aculos associados com a propaga¸c˜ao eletromagn´etica do sinal e.g. reflex˜oes, refra¸c˜oes, absor¸c˜oes, multipath interference etc. O GPS sendo uma tec-nologia n˜ao universal, em ambientes interiores perde significativamente precis˜ao e exatid˜ao. As t´ecnicas de posicionamento baseadas nas carater´ısticas dos sinais elec-tromagn´eticos s˜ao uma das formas que tˆem vindo a ser estudadas, mas apresentam v´arios problemas, alguns deles s˜ao referidos posteriormente [8].
Os m´etodos de an´alise de cena como o fingerprint s˜ao promissores mas possuem como maior fator de erro a presen¸ca de obst´aculos que obstruem a linha-de-vista ou a orienta¸c˜ao do terminal m´ovel [9]. Este tipo de t´ecnicas s˜ao usadas, por exemplo, quando n˜ao existe infraestrutura dedicada apenas `a localiza¸c˜ao, logo recorre-se `as carater´ısticas do sinal das redes de comunica¸c˜oes sem fios.
Com o conhecimento da posi¸c˜ao inicial de um indiv´ıduo, a melhoria da precis˜ao das estimativas da sua localiza¸c˜ao pode ser obtida atrav´es de sensores adicionais, por exemplo os sensores IMU. Estes sensores podem at´e, ser a ´unica forma de localiza¸c˜ao nos casos onde n˜ao existe um levantamento pr´evio dos sinais RF, relativamente ao
fingerprint, quando a localiza¸c˜ao das referˆencias n˜ao ´e conhecida ou n˜ao existe in-fraestrutura sem fios, os sensores IMU podem ser o ´unico m´etodo. As aplica¸c˜oes poss´ıveis com estes sensores s˜ao diversas, mas os mais desafiantes enquadram-se em ambientes onde h´a, frequentemente, m´ultiplas fontes de interferˆencia ou ru´ıdo e.g. influˆencia de materiais met´alicos pr´oximos do dispositivo, ru´ıdo de constru¸c˜ao dos sensores. De modo a alcan¸car altas precis˜oes nestes ambientes, ´e necess´ario um forte processamento dos dados, posteriormente [10].
A variedade de sistemas que s˜ao baseados em sensores IMU ´e significativa, variando na zona do corpo em que o utilizador porta o dispositio que cont´em os sensores, tipos de movimentos analisados, etc. As finalidades do mesmo sistema podem va-riar de acordo com estudo onde est´a inserido, a presente disserta¸c˜ao enquadra-se no estudo da implementa¸c˜ao de um sistema que recorre a sensores IMU presentes num dispositivo m´ovel portado na m˜ao do utilizador. A finalidade consiste na dete¸c˜ao de movimentos de locomo¸c˜ao b´asicos. Este tipo de sistemas ´e relativo `a ´area de estudo da navega¸c˜ao pedestre.
Recentemente, foram introduzidos v´arios Sistemas de Navega¸c˜ao de Pedestres (PNS) de baixo custo e de implementa¸c˜ao simples. Estes sistemas utilizam os dados re-colhidos de sensores IMU de modo detetar passos humanos. Estes sensores podem ser dedicados ou presentes em smatphones. Na maioria destes sistemas, um impacto
vertical ´e considerado como um passo, e com a sua orienta¸c˜ao cria-se o caminho percorrido pelo utilizador, i.e. uma procura cont´ınua da localiza¸c˜ao ao longo do seu percurso dentro de um determinado espa¸co, este m´etodo denomina-se tracking ou seguimento. O desempenho de um sistema PNS depende, maioritariamente, dos m´etodos de processamento dos dados de um modo computacionalmente r´apido e das carater´ısticas dos pr´oprios utilizadores.
O objetivo principal deste trabalho consiste no estudo explorat´orio de t´ecnicas e m´etodos capazes de identificar movimentos e.g. passos nos dados adquiridos pelos sensores IMU, de modo a que posteriormente seja poss´ıvel a implementa¸c˜ao de um modelo de localiza¸c˜ao que permita seguir os movimentos do utilizador, em ambientes interiores ou exteriores. Esse modelo dever´a ser capaz de permitir a determina¸c˜ao de localiza¸c˜oes em locais onde n˜ao existe qualquer infraestrutura de rede, ou funcionar de modo complementar com sistemas que recorrem a infraestrutura de comunica¸c˜oes sem fios de modo a mitigar os erros.
1.2
Contribui¸
c˜
ao
Este trabalho foi elaborado com a ambi¸c˜ao de contribuir em v´arias vertentes no contexto da localiza¸c˜ao indoor, atrav´es de testes e estudo de diferentes processos de localiza¸c˜ao recorrendo aos sensores IMU, de modo a obter resultados relevantes. Neste trabalho s˜ao apresentados m´etodos de determina¸c˜ao de localiza¸c˜ao que pos-sam melhorar o desempenho de outros sistemas de localiza¸c˜ao, principalmente no
tracking do utilizador com dete¸c˜ao de passos e estima¸c˜ao do comprimento dos res-petivos comprimentos. De modo a capturar dados, foi desenvolvida numa aplica¸c˜ao m´ovel Windows Phone de aquisi¸c˜ao e armazenamento de dados dos sensores IMU, para que possam ser estudados e processados.
A base de um PNS ´e constitu´ıda por t´ecnicas de dete¸c˜ao de movimentos cara-ter´ısticos do utilizador, recorrendo a dados adquiridos pelos sensores IMU. O foco
principal da presente disserta¸c˜ao ´e aplicado em m´etodos de dete¸c˜ao de passos e es-tima¸c˜ao dos seus comprimentos. ´E apresentada uma escolha de cada um dos tipos de m´etodos, com base nos resultados dos testes realizados, de modo a que sejam implementados no sistema proposto. Parte deste sistema foi desenvolvido atrav´es de uma aplica¸c˜ao m´ovel.
1.3
Organiza¸
c˜
ao da Disserta¸
c˜
ao
A presente disserta¸c˜ao est´a organizada em 7 cap´ıtulos que abordam o estudo e o desenvolvimento de t´ecnicas de navega¸c˜ao pedestre. No corrente cap´ıtulo ´e feita uma introdu¸c˜ao `as t´ecnicas, metodologias e hist´oria da localiza¸c˜ao e a motiva¸c˜ao que levou ao desenvolvimento deste trabalho.
No Cap´ıtulo 2 ´e feita uma an´alise e caracteriza¸c˜ao dos diferentes sistemas de lo-caliza¸c˜ao, metodologias e medidas de performance mais comuns das t´ecnicas de localiza¸c˜ao. Com finalidade complementar, s˜ao apresentados alguns trabalhos rela-cionados com a tem´atica da presente disserta¸c˜ao.
As t´ecnicas usadas nos sistema de localiza¸c˜ao baseados na locomo¸c˜ao humana s˜ao apresentadas e pormenorizadas no Cap´ıtulo 3.
Alguns conceitos e m´etodos de an´alise e processamento de sinais s˜ao apresenta-dos no Cap´ıtulo 4.
O estudo das amostras capturadas, carateriza¸c˜ao e otimiza¸c˜ao das t´ecnicas estu-dadas e propostas, e do sistema proposto, bem como todos os conceitos e as suas utiliza¸c˜oes s˜ao apresentados no Cap´ıtulo 5.
Os ensaios, resultados e conclus˜oes das v´arias t´ecnicas s˜ao apresentados no cap´ıtulo 6 e de modo finalizador, s˜ao apresentadas as principais conclus˜oes e s˜ao descritas
2
Sistemas de Localiza¸c˜
ao
Este cap´ıtulo inicia-se com uma apresenta¸c˜ao geral dos sistemas de localiza¸c˜ao. Estes sistemas utilizam v´arios e diferentes tipos de informa¸c˜oes que possam caracterizar o localiza¸c˜ao de um terminal de modo a determin´a-la, com maior ou menor pre-cis˜ao dependendo da complexidade do sistema ou da aplica¸c˜ao. A determina¸c˜ao da localiza¸c˜ao ´e um processo utilizado com base nas referˆencias dentro de um espa¸co pr´e-definido. Geralmente, este processo ´e denominado localiza¸c˜ao (geolocation,
ra-dio location, location sensing, position location) [11, 12].
Ao longo deste cap´ıtulo, os sistemas de localiza¸c˜ao s˜ao abordados, identificando as suas principais caracter´ısticas, arquitectura e metodologias utilizadas e apresentam-se alguns sistemas de localiza¸c˜ao considerados mais relevantes. Os sistemas estuda-dos s˜ao baseados em dispositivos m´oveis.
2.1
Carater´ısticas de um Sistema de Localiza¸
c˜
ao
Os sistemas de localiza¸c˜ao possuem in´umeras caracter´ısticas na sua implementa¸c˜ao e manuten¸c˜ao, dos quais podem ser destacados os seguintes parˆametros:
• Posi¸c˜ao F´ısica e Localiza¸c˜ao Simb´olica
– Posi¸c˜ao F´ısica: A localiza¸c˜ao ´e representada por pontos relativos a sis-tema de coordenadas geogr´aficas como latitude e longitude, ou por pontos relativos a um sistema de coordenadas cartesianas bi ou tridimensionais.
– Posi¸c˜ao Simb´olica: Cada localiza¸c˜ao poss´ıvel ´e uma zona que ´e repre-sentada por uma etiqueta que a caracterize, e.g. ”Piso 0 - Audit´orio G0.08” [13].
• Referencia¸c˜ao Absoluta ou Relativa:
– Referencia¸c˜ao Absoluta: Uma referˆencia ´e considerada absoluta quando independentemente da posi¸c˜ao do terminal m´ovel no espa¸co, o seu refe-rencial ´e sempre o mesmo para qualquer sistema. O GPS usa referen-cia¸c˜ao absoluta, para qualquer localiza¸c˜ao ao longo do globo, o formato das coordenadas mant´em-se geogr´afico. De igual modo, o referencial ´e o mesmo, a latitude tem como referˆencia o equador, a longitude tem o meridiano de Greenwich e a altitude tem o n´ıvel m´edio das ´agua do mar.
– Referencia¸c˜ao Relativa: Considera-se relativa a referˆencia que, apenas se mant´em no sistema em quest˜ao e n˜ao se aplica a referencial global. Este tipo de referencia¸c˜ao ´e usual nos sistemas de localiza¸c˜ao indoor, onde as localiza¸c˜oes poss´ıveis de um terminal m´ovel s˜ao definidas com base em posi¸c˜oes pr´e-definidas e/ou referenciais locais [13].
• Exatid˜ao
A exatid˜ao ´e considerada uma medida de avalia¸c˜ao de qualidade, mede o erro entre a localiza¸c˜ao estimada e a localiza¸c˜ao real, em unidades. No con-texto dos sistemas de localiza¸c˜ao, quanto menor for o erro entre o resultado obtido do sistema na determina¸c˜ao da localiza¸c˜ao e o resultado esperado ou real, maior ser´a a exatid˜ao [13].
• Precis˜ao
A precis˜ao ´e considerada uma medida de avalia¸c˜ao de qualidade, que mede a proximidade dos diferentes resultados. ´E uma estimativa percentual para uma determinada exatid˜ao, quanto menor for o desvio padr˜ao do conjunto de resultados mais preciso ser´a o sistema. Um sistema pode ser significati-vamente preciso mas n˜ao significativamente exato, i.e., os resultados obtidos variam muito pouco mas os mesmos est˜ao relativamente longe do valor real ou esperado [13].
• Sistemas de Localiza¸c˜ao Remotos e Locais
– Sistemas de Localiza¸c˜ao Remotos: A obten¸c˜ao da localiza¸c˜ao ´e re-alizada num outro sistema e n˜ao no pr´oprio terminal m´ovel que se pre-tende localizar, posteriormente a informa¸c˜ao da localiza¸c˜ao determinada ´e transmitida ao terminal.
– Sistemas de Localiza¸c˜ao Locais: A determina¸c˜ao da localiza¸c˜ao ´e realizada no pr´oprio terminal m´ovel [13].
• Capacidade de Reconhecimento
A capacidade de reconhecimento est´a associada ao sistema de localiza¸c˜ao que consegue identificar e reconhecer objetos [12].
• Network–Assisted ou Mobile–Assisted
Considera-se que estamos perante um sistema Network-Assisted quando a capta¸c˜ao dos dados e a determina¸c˜ao da localiza¸c˜ao baseadas nesses dados s˜ao realizadas em fontes diferentes, em contraste, em sistemas Mobile-Assisted a determina¸c˜ao e a capta¸c˜ao s˜ao realizadas no terminal m´ovel [12].
• Granularidade Espacial
A granularidade espacial consiste no conjunto de pontos que o sistema consegue distinguir numa ´area. Um sistema com uma granularidade elevada
necessita de possuir, for¸cosamente, uma precis˜ao tamb´em elevada. A deter-mina¸c˜ao da localiza¸c˜ao ao n´ıvel da rua possui uma maior granularidade do que ao n´ıvel da cidade.
• Custos e tempo
O custo dos sistemas de localiza¸c˜ao reparte-se no custo de implementa¸c˜ao, instala¸c˜ao, recursos obrigat´orios e infraestutura. O tempo necess´ario para criar o sistema de localiza¸c˜ao, desde o in´ıcio do seu projeto at´e ao t´ermino da sua cria¸c˜ao denomina-se tempo de implementa¸c˜ao. O tempo necess´ario para determinar a localiza¸c˜ao de um terminal m´ovel, desde o momento em que ´e solicitada a informa¸c˜ao de localiza¸c˜ao at´e estar dispon´ıvel, denomina-se tempo de execu¸c˜ao [12, 13].
• Escalabilidade
Escalabilidade consiste na capacidade de um sistema de localiza¸c˜ao au-mentar a sua ´area de abrangˆencia. Um sistema que e.g., funciona restrita-mente numa ´area, a estabilidade deste sistema consiste capacidade do sistema conseguir ou n˜ao estender a sua ´area de cobertura mantendo as restantes cara-ter´ısticas inalteradas. A escalabilidade implica que a informa¸c˜ao da localiza¸c˜ao mantenha o mesmo n´ıvel de precis˜ao e exatid˜ao, aumentando o espa¸co de co-bertura. Na implementa¸c˜ao de um sistema de localiza¸c˜ao, a aplicabilidade desta carater´ıstica ´e uma das preocupa¸c˜oes [12].
• Privacidade e Seguran¸ca
A privacidade de um sistema de localiza¸c˜ao consiste na garantia de que a identidade do utilizador permane¸ca an´onima. ´E uma carater´ıstica eticamente problem´atica, o conhecimento da localiza¸c˜ao dos utilizadores pode ser escon-dido, opcionalmente, pelos pr´oprios de modo a manterem o n´ıvel de privacidade desejado, no entanto pode haver diversas ocasi˜oes em que essa priva¸c˜ao ´e pre-judicial aos utilizadores. A seguran¸ca de um sistema de localiza¸c˜ao consiste na garantia do barramento do acesso de utilizadores n˜ao autorizados ao pr´oprio sistema ou a dados de outros utilizadores [12, 14, 15].
• Limita¸c˜oes
As limita¸c˜oes dos sistemas de localiza¸c˜ao s˜ao normais e devem ser dadas a conhecer publicamente pelos respetivos desenvolvedores, e.g. tipo de ambi-ente e infraestrutura necess´aria ao funcionamento do sistema. H´a uma grande variedade de obst´aculos que limitam estes sistemas, consequentemente ´e usual que haja esfor¸cos para os contornar, como ´e o caso de estudo da presente disserta¸c˜ao.
2.2
Metodologias de Localiza¸
c˜
ao
O objetivo principal de um sistema de localiza¸c˜ao consiste na determina¸c˜ao da loca-liza¸c˜ao de terminais m´oveis, quando requisitada. Esta determina¸c˜ao deve ser reali-zada, totalmente, no sistema de localiza¸c˜ao, atrav´es das diversas formas ou m´etodos de obter a informa¸c˜ao necess´aria para estimar a localiza¸c˜ao. As informa¸c˜oes podem ser origin´arias de fontes diferentes. Estes sistemas devem realizar o processo de obten¸c˜ao de informa¸c˜ao e de estima¸c˜ao, com acesso a referˆencias conhecidas. Com base em estudos de J. Hightower et al., em [16], existem trˆes grupos principais de metodologias nomeadamente triangula¸c˜ao, proximidade e an´alise de cena. Estes grupos de metodologias s˜ao os mais aceites e usados na literatura, segundo as suas carater´ısticas e modelos de estima¸c˜ao de localiza¸c˜oes.
2.2.1
Localiza¸
c˜
ao usando Triangula¸
c˜
ao
A triangula¸c˜ao utiliza propriedades geom´etricas dos triˆangulos de modo a estimar localiza¸c˜oes de terminais m´oveis. A triangula¸c˜ao pode ser dividida em dois grupos, latera¸c˜ao e angula¸c˜ao [11, 16].
• Latera¸c˜ao: A determina¸c˜ao da localiza¸c˜ao do terminal m´ovel ´e realizada com
• Angula¸c˜ao: A determina¸c˜ao da localiza¸c˜ao do terminal m´ovel ´e realizada
com base em c´alculos de ˆangulos de incidˆencia entre o terminal m´ovel e as referˆencias.
2.2.2
Localiza¸
c˜
ao usando Proximidade
A proximidade utiliza dete¸c˜oes de proximidade entre terminais m´oveis e referˆencias com localiza¸c˜oes conhecidas, com o objetivo de estimar a localiza¸c˜ao dos terminais. Este conjunto de metodologias pode ser dividido nas seguintes t´ecnicas [11, 16, 17]:
• Contacto F´ısico: A localiza¸c˜ao do terminal m´ovel ´e realizada com base
em sensores de contacto posicionados em localiza¸c˜oes conhecidas. A dete¸c˜ao confirma a presen¸ca do terminal m´ovel nas diferentes localiza¸c˜oes;
• C´elula de Origem: A localiza¸c˜ao do terminal m´ovel ´e realizada com base em
informa¸c˜oes da c´elula onde se encontra, sendo esta uma ´area com abrangˆencia conhecida;
• Identifica¸c˜ao Autom´atica: A localiza¸c˜ao do terminal m´ovel ´e realizada
com base na ´ultima localiza¸c˜ao conhecida ou no uso de cart˜oes na zona de identifica¸c˜ao.
2.2.3
Localiza¸
c˜
ao usando An´
alise de Cena
A an´alise de cena usa a an´alise de padr˜oes de modo a determinar a localiza¸c˜ao do terminal m´ovel. Este conjunto de metodologias pode ser dividido nos seguintes grupos [11, 16, 17]:
• An´alise de Imagens: A localiza¸c˜ao do terminal m´ovel ´e realizada com base
em an´alises de imagens ou v´ıdeos e, com o uso de algoritmos de processamento digital de imagem estima-se a localiza¸c˜ao;
• Fingerprinting: A localiza¸c˜ao do terminal m´ovel ´e realizada com base em
mapas de valores eletromagn´eticos que caraterizam localiza¸c˜oes de referˆencia, a localiza¸c˜ao ´e estimada com o uso de algoritmos de estima¸c˜ao da localiza¸c˜ao.
2.2.4
Triangula¸
c˜
ao
A triangula¸c˜ao consiste em utilizar as propriedades geom´etricas dos triˆangulos de modo a estimar a localiza¸c˜ao do terminal m´ovel. Esta metodologia pode ser dividida em latera¸c˜ao e angula¸c˜ao; na latera¸c˜ao, o c´alculo na latera¸c˜ao ´e realizado com base nas distˆancias entre o terminal m´ovel e um conjunto de referˆencias. No caso da angula¸c˜ao, s˜ao usadas as determina¸c˜oes dos ˆangulos de incidˆencia [16].
Latera¸c˜ao
A latera¸c˜ao ´e uma t´ecnica de triangula¸c˜ao que utiliza as distˆancias entre o terminal m´ovel e as v´arias referˆencias, para assim ser poss´ıvel estimar sua localiza¸c˜ao. Pode ser abordada de duas formas, uma delas ´e de modo circular, em que a determina¸c˜ao da localiza¸c˜ao de um terminal consiste na interce¸c˜ao de v´arias circunferˆencias cu-jos centros s˜ao as referˆencias e cujos raios s˜ao de valor igual `a distˆancia entre as referˆencias e o terminal m´ovel 2.1 [16, 18].
Figura 2.1 – Latera¸c˜ao Circular [18]
A outra forma de latera¸c˜ao, denomina-se latera¸c˜ao hiperb´olica e consiste em tra¸car hip´erboles com dois focos centrados em cada par de referˆencias. A localiza¸c˜ao do
terminal m´ovel ´e estimada com base na interce¸c˜ao das hip´erboles 2.2. Em ambas as formas s˜ao necess´arias, no m´ınimo, trˆes pontos n˜ao colineares em cen´arios bidimen-sionais. Para cen´arios tridimensionais s˜ao necess´arios 4 pontos n˜ao complanares.
Figura 2.2 – Latera¸c˜ao Hiperb´olica [18]
Na t´ecnica de latera¸c˜ao existem, essencialmente quatro processos para a obten¸c˜ao do valor da distˆancia entre o terminal m´ovel e as referˆencias, nomeadamente:
• Processo Direto
A obten¸c˜ao da distˆancia ´e realizada atrav´es de uma medi¸c˜ao direta por a¸c˜ao mecˆanica ou cin´etica. ´E equivalente a uma extens˜ao f´ısica entre o terminal m´ovel e as referˆencias mensuradas com objetos de medi¸c˜ao. Considera-se que seja um processo de aplicabilidade reduzida [16].
• Tempo de Chegada ou Time of Arrival (ToA)
A obten¸c˜ao da distˆancia ´e realizada atrav´es da mensura¸c˜ao do tempo de chegada de um sinal transmitido por um terminal m´ovel at´e `as referˆencias ou vice-versa. O valor da velocidade de propaga¸c˜ao dos sinais eletromagn´eticos ´e aproximado ao da velocidade da luz:
c = 3× 108[m/s] (2.1)
e com base neste valor, ´e poss´ıvel estimar a distˆancia entre o ponto de emiss˜ao do sinal e o ponto de rece¸c˜ao. Esta estima¸c˜ao tende a estar bastante perto do
valor real [16]. Com a velocidade de propaga¸c˜ao e o tempo medido estima-se a distˆancia ao terminal at´e todas as referˆencias. Caso hajam trˆes referˆencias, ser˜ao estimadas trˆes distˆancias com base neste valor, por exemplo. O tempo de voo do sinal emitido do terminal para cada uma das referˆencias pode ser calculado a partir da diferen¸ca entre o instante em que o sinal ´e emitido ti e o
instante em que ´e recebido por uma referˆencia tf, ou seja,
t = tf − ti[s] (2.2)
Conhecido o tempo de voo, cada uma das distˆancias pode ser calculada:
d = c× t[m] (2.3)
Em que:
– d - distˆancia;
– c - velocidade de propaga¸c˜ao do sinal;
– t - tempo de voo.
Conhecendo os valores das distˆancias d entre o terminal e todas as referˆencias, ´e poss´ıvel usar a latera¸c˜ao circular para estimar a localiza¸c˜ao do terminal. A interce¸c˜ao das circunferˆencias resulta num ponto ou numa ´area, onde se estima que se encontre o terminal. Uma das grandes limita¸c˜oes deste processo consiste na necessidade de existir sincronismo temporal entre o terminal m´ovel e todas as referˆencias, em que um pequeno erro de sincronismo escala para um grande erro na estima¸c˜ao da localiza¸c˜ao do terminal. Tipicamente, um erro no c´alculo do tempo de voo de cem nanossegundos resulta num erro de trinta metros, na estima¸c˜ao da localiza¸c˜ao do terminal m´ovel. O GPS usa este processo [19].
• Tempo de Chegada Relativo ou Time Difference of Arrival (TDoA)
A t´ecnica do tempo de chegada relativo assemelha-se ao tempo de che-gada, modificando as entidades intervenientes no c´alculo. Na literatura, esta t´ecnica pode ser dividida em duas metodologias. A primeira metodologia, a da relatividade, consiste na diferen¸ca do tempo de chegada de um sinal entre
duas referˆencias. Na segunda metodologia, ´e mensurada a diferen¸ca entre dois sinais de tecnologias diferentes, e.g. sinais r´adio. Desenvolvendo a primeira metodologia, o parˆametro de entrada ´e o sinal emitido pelo terminal m´ovel para duas referˆencias. ´E necess´ario sincronismo entre as referˆencias. A imple-menta¸c˜ao deste processo est´a ilustrado na Figura 2.2.
O terminal a localizar simbolizado por X, o tempo que um sinal demora a chegar `a referˆencia A simboliza-se por tA , e `a referˆencia B simboliza-se por tB. A diferen¸ca temporal ´e dada por:
T DoAB−A =|tB− tA| = k (2.4)
O valor de T DoAB−Acorresponde ent˜ao `a diferen¸ca temporal do sinal
relativa-mente `as referˆencias A e B. Com este valor ´e poss´ıvel criar uma hip´erbole com os focos nas duas referˆencias. Matematicamente, todos os pontos da hip´erbole representam as poss´ıveis posi¸c˜oes do terminal X, cujas distˆancias aos focos das hip´erboles s˜ao representadas por k timesc, num plano bidimensional, com base em:
|dX−B − dX−A| = k × c (2.5)
A posi¸c˜ao do terminal X ´e um dos pontos da hip´erbole, n˜ao sendo poss´ıvel saber qual. De modo a obter o conhecimento do ponto, ´e necess´ario adicionar uma referˆencia C, do mesmo modo:
T DoAC−A =|tC − tA| = k1 (2.6)
T DoAC−B =|tC − tB| = k2 (2.7)
|dX−C− dX−A| = k1× c (2.8)
|dX−C− dX−B| = k2× c (2.9)
A interce¸c˜ao das hip´erboles resulta no ponto pretendido, a localiza¸c˜ao terminal
X, no melhor dos casos. Em maioria, o resultado da interce¸c˜ao ´e uma ´area e n˜ao um ponto, garantindo que o terminal esteja nesta ´area com um grau de certeza elevado [18, 20].
A segunda metodologia de TDoA utiliza sinais de tecnologias diferentes, nas determina¸c˜oes das relatividades dos tempos de chegada. A diferen¸ca dos tem-pos de voo de sinais com velocidades de propaga¸c˜ao diferentes ´e mais complexa, os tempos de voo s˜ao calculados com base em valores d´ıspares. Sendo um deles mais lento do que o outro, chegar´a mais tarde `a referˆencia. O sinal que chega primeiro simboliza-se por t1 e o segundo por t2. O valor da diferen¸ca temporal
´e expressa, em segundos, por:
t = t2− t1[s] (2.10)
Latera¸c˜ao circular:
d = c× t[m] (2.11)
Em que:
– d - distˆancia;
– c - velocidade de propaga¸c˜ao do sinal;
– t - tempo de voo.
Este m´etodo ´e utilizado pelo sistema de localiza¸c˜ao Cricket. A resolu¸c˜ao ´e seriamente dependente do meio e das condi¸c˜oes em que ´e implementado [20].
• Atenua¸c˜ao ou Received Signal Strenght (RSS)
A metodologia de determinar as distˆancias recorrendo a valores de RSSi baseia-se em valores da potˆencia do sinal enviado ao longo da distˆancia. Os modelos de propaga¸c˜ao de ondas eletromagn´eticas permitem traduzir valo-res de potˆencia de sinal ao longo de percursos percorridos. Um modelo de propaga¸c˜ao para ambientes interiores com uma frequˆencia de 2.4 GHz, por exemplo, pode ser representado pela seguinte equa¸c˜ao [21]:
P L = P L1metro+ 10× log(Dn) + S (2.12)
– P L - valor total de Path Loss entre o emissor e o recetor em dB;
– P L1metro - valor de referˆencia do Path Loss entre o emissor e o recetor
em dB na condi¸c˜ao da distˆancia entre eles ser igual a um metro;
– D - distˆancia entre o emissor e o recetor, em metros;
– n - coeficiente de Path Loss para um determinado ambiente; – S - graus de Shadow Fading presentes no ambiente, em dB.
Sabendo os valores da potˆencia de sa´ıda, os ganhos das antenas emissora e rece-tora e o valor da atenua¸c˜ao do meio por unidade de distˆancia (Loss em dB/km ou dB/m), ´e facilmente obtida uma estimativa da distˆancia entre o emissor e o recetor. Usando o m´etodo padr˜ao para calcular a distˆancia, conhecendo os valores da potˆencia transmitida e das perdas totais do sinal, obt´em-se:
D = n √ inv log ( RXP W R − TXP W R + LTX − GTX + P L1metro− S + LRX − GRX −10 ) (2.13) Em que:
– RXP W R - potˆencia recebida pelo recetor, em dB;
– TXP W R - potˆencia emitida pelo emissor, em dB;
– LTX - somat´orio de todas as perdas do lado do emissor, em dB;
– LRX - somat´orio de todas as perdas do lado do recetor, em dB;
– n - coeficiente de Path Loss para um determinado ambiente; – GTX - ganho da antena do emissor, em dBi;
– GRX - ganho da antena do recetor, em dBi.
Usualmente, a t´ecnica da atenua¸c˜ao ´e utilizada com a latera¸c˜ao circular para a estima¸c˜ao da localiza¸c˜ao de terminais m´oveis. O m´etodo ´e eficaz em condi¸c˜oes ambientais ´otimas com linha de vista existente entre o emissor e o recetor. Em condi¸c˜oes ambientais n˜ao ´otimas, ´e imposs´ıvel calcular com precis˜ao os valores das perdas, devido a reflex˜oes, refra¸c˜oes, atenua¸c˜oes causadas por obst´aculos e multipath interference [16, 18].
Angula¸c˜ao
A angula¸c˜ao ´e outra metodologia da triangula¸c˜ao semelhante `a latera¸c˜ao. A es-tima¸c˜ao da localiza¸c˜ao de terminais m´oveis, utiliza os ˆangulos de incidˆencia dos sinais, normalmente os ˆangulos de chegada. Maioritariamente, o m´etodo usado pela angula¸c˜ao denomina-se ˆangulo de chegada (Angle of Arrival - AoA), consiste na ob-ten¸c˜ao do ˆangulo de incidˆencia do sinal de cada uma das antenas recetoras, situadas nas referˆencias. Para a localiza¸c˜ao ser estimada, s˜ao necess´arias duas referˆencias em ambientes bidimensionais e trˆes em ambientes tridimensionais. Uma das formas de obter este m´etodo ´e com a utiliza¸c˜ao de antenas girat´orias que identifiquem qual o ˆ
angulo com potˆencia recebida mais elevada [22].
Uma situa¸c˜ao do nosso dia-a-dia em que esta t´ecnica ´e aplicada consiste na vi-gia de incˆendios. Quando uma das torres de vigia avista um incˆendio, comunica `a entidade central o ˆangulo que ´e formado entre o norte magn´etico e a dire¸c˜ao em que se localiza o incˆendio. Qualquer outra torre procede da mesma forma, de modo a que seja poss´ıvel `a entidade central determinar a localiza¸c˜ao do incˆendio Figura 2.3 [23]. A principal limita¸c˜ao desta metodologia ´e multipath interference em situa¸c˜oes em que e.g., o emissor e o recetor n˜ao se encontrem em linha de vista, a precis˜ao da angula¸c˜ao desce significativamente [13, 18, 24].
2.2.5
Proximidade
As t´ecnicas de estima¸c˜ao da localiza¸c˜ao de terminais m´oveis baseadas em proximi-dade funcionam com base no princ´ıpio de encontrar a referˆencia mais pr´oxima do dispostivo a localizar. A referˆencia mais pr´oxima pode ser encontrada no momento atual com base na que se encontra mais pr´oxima do terminal m´ovel, ou ent˜ao a ´
ultima referˆencia que detetou o terminal m´ovel. O alcance deste tipo de metodolo-gias ´e limitado, maioritariamente, pelo n´umero de referˆencias, que deve ser elevado de modo a que o sistema seja cred´ıvel. A resolu¸c˜ao est´a associada ao n´umero de re-ferˆencias dispon´ıvel, maior resolu¸c˜ao resultar´a num aumento dos custos nos recursos a utilizar. As metodologias de proximidade podem ser divididas em trˆes t´ecnicas principais [24] [16]:
• Contacto F´ısico
O m´etodo do contacto f´ısico consiste na dete¸c˜ao de contactos entre objetos e referˆencias. ´E necess´ario que as localiza¸c˜oes das referˆencias sejam conhecidas, no caso de contacto com um objeto, ´e poss´ıvel atualizar a localiza¸c˜ao atual do objeto. Esta t´ecnica ´e aplicada, usualmente, a sistemas de coordenadas bi ou tridimensionais e possuiu como maior inconveniente o facto de ser poss´ıvel a identifica¸c˜ao do contacto de um objeto a uma das referˆencias, mas ser dif´ıcil a carateriza¸c˜ao e identifica¸c˜ao do objeto em si. O peso do objeto ou a marca de impress˜ao ajudam na identifica¸c˜ao mas n˜ao s˜ao suficientes. Normalmente as referˆencias s˜ao pequenos sensores de press˜ao, sensores de toque, sensores capacitivos, etc. Um exemplo de um sistema que use esta t´ecnica ´e o Smart
Floor [25].
• C´elula de Origem
O m´etodo da c´elula de origem baseia-se na monitoriza¸c˜ao do terminal m´ovel conectado a uma rede sem fios celular, atrav´es de uma referˆencia. Este conceito denomina-se c´elula de r´adio-frequˆencia e consiste na identifica¸c˜ao da c´elula em que o terminal est´a presente no momento [18, 24] Figura 2.4.
![Figura 2.12 – Dete¸ c˜ ao de passos atrav´ es de zero–crossing [45]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16077673.1106727/70.892.231.575.751.1030/figura-dete-ao-de-passos-atrav-zero-crossing.webp)
![Figura 2.13 – Dete¸ c˜ ao de passos e estima¸c˜ ao dos seus comprimentos [45]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16077673.1106727/71.892.355.646.174.629/figura-dete-ao-passos-estima-dos-seus-comprimentos.webp)
![Figura 2.14 – Dete¸c˜ ao do comportamento e de passos e estima¸c˜ ao dos seus comprimentos [36]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16077673.1106727/72.892.127.682.560.927/figura-dete-comportamento-passos-estima-dos-seus-comprimentos.webp)
![Figura 3.1 – Ilustra¸c˜ ao da cria¸ c˜ ao da anima¸c˜ oes da caminhada humana [67]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16077673.1106727/78.892.117.691.459.685/figura-ilustra-ao-cria-anima-oes-caminhada-humana.webp)
![Figura 3.2 – For¸ ca aplicada no solo medida na parte inferior do p´ e [66].](https://thumb-eu.123doks.com/thumbv2/123dok_br/16077673.1106727/79.892.308.670.767.1037/figura-for-ca-aplicada-solo-medida-parte-inferior.webp)
![Figura 3.3 – Ciclo da caminhada baseado em valores m´ edios de ˆ angulos, orienta¸c˜ oes e alturas durante as duas fases da caminhada [66]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16077673.1106727/80.892.190.617.169.591/figura-caminhada-baseado-valores-angulos-orienta-alturas-caminhada.webp)

![Figura 3.9 – M´ etodo de dete¸c˜ ao de passos atrav´ es de valores m´ aximos [68]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16077673.1106727/85.892.282.695.171.412/figura-m-etodo-dete-passos-atrav-valores-aximos.webp)

