Capítulo 1
1 Introdução ao Controle de Sistemas em Tempo
Discreto
Neste item, será apresentado os equipamentos utilizados em sistemas de controle.
1.1 Introdução
Aqui, serão tratados sistemas lineares e invariantes no tempo em que o controle de sistemas em tempo discreto é entendido como a implementação de sistemas de controle utilizando placas de aquisição de dados capazes de medir uma determinada quantidade de sinais analógicos, processá-los e devolvê-los ao meio ambiente.
1.2 Sistemas de controle em tempo discreto
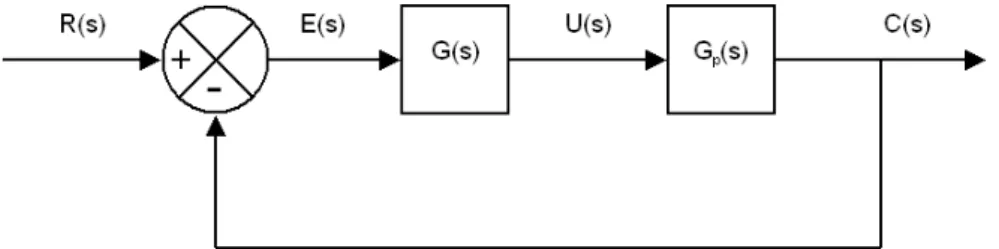
Um sistema de controle em tempo contínuo em realimentação pode ser apresentado como na Figura 1.1, neste caso, todos os sinais envolvidos são sinais contínuos e o sistema de controle e a planta podem ser escrito no domínio de Laplace.
Figura 1.1: Exemplo de um sistema de controle em tempo contínuo
Já os sistemas de controle em tempo discreto envolvem a discretização de uma ou mais variáveis do processo de controle. Normalmente, a implementação de um sistema de controle em tempo discreto envolve a utilização de um computador em conjunto com uma placa de aquisição de dados para a implementação do controlador. Sendo assim, está implícito no método que ocorra pelo menos uma passagem do tempo contínuo para o tempo discreto, denominada discretização ou amostragem do sinal, e uma passagem do tempo discreto para o tempo contínuo, chamada de reconstrução.
Figura 1.2: Exemplo de um sistema de controle em tempo discreto
Ambiente Físico é o ambiente no qual será implementado o sistema de controle, é o ambiente real onde o processo físico ocorre.
Ambiente Computacional é o ambiente onde o sistema de controle é implementado, isto é, onde ocorre o processo de síntese do controlador e é calculada a lei de controle. Este ambiente representa o hardware e software onde o sistema de controle é implementado, como por exemplo no Matlab/Simulink.
Variável Física é a quantidade física que se deseja medir para ser usada no sistema de controle, por exemplo, deslocamento, velocidade, aceleração, temperatura, pressão, etc.
Transdutor é o dispositivo capaz de transformar uma quantidade de entrada em outra quantidade de saída, normalmente voltagem, isto é, é o dispositivo que tem a capacidade de medir a variável física e transformá-la em voltagem para ser utilizado como informação pelo sistema de controle, em outras palavras, é simplesmente o sensor, como acelerômetros, vibrômetros laser, células de carga, sensores de posição, tacômetros, microfones, etc.
Condicionador de sinais é o dispositivo que alimenta o transdutor, pois normalmente o transdutor precisa de uma fonte de alimentação específica para ele. De maneira geral, os transdutores geram uma quantidade de voltagem insuficiente para serem utilizados em sistemas de medida e controle, necessitando assim de um sistema de amplificação. Os condicionadores de sinais podem incluir um amplificador operacional como fonte de alimentação básica, um sistema de amplificação e filtros analógicos, integradores, etc.
Figura 1.3: Exemplo de curva em freqüência de um filtros ideais. baixo. Passa-alta, Rejeita-banda ou Notch e Passa-banda
Multiplexador Analógico normalmente é parte integrante da placa de aquisição de sinais e é o dispositivo que conecta os canais de entrada da placa de aquisição de dados ao circuito “Sample and hold”. Normalmente uma placa de aquisição de sinais contém vários canais de entrada e apenas um multiplexador analógico.
Circuito Sample-and-Hold é dispositivo que faz a amostragem, sample, e mantém o sinal amostrado por um determinado período de tempo, hold. Este dispositivo é aquele que o usuário tem a escolha do tempo de discretização.
Conversor Analógico Digital é o dispositivo que realmente realiza o processo de amostragem e quantificação do sinal analógico, isto é, a saída do conversor A/D é um sinal binário, normalmente o multiplexador analógico e circuito sample-and-hold são partes integrantes do conversor A/D.
Figura 1.4: Componentes básicos de um sistema de medida
Demultiplexador é dispositivo que conecta a saída de dados da placa de aquisição de sinais com os respectivos canais de saída. Esta conexão é sincronizada com o respectivo tempo de amostragem.
Conversor Digital Analógico é o dispositivo que transforma uma entrada digital, neste caso um número binário, em uma saída analógica.
Figura 1.5: sinal contínuo e sinal contínuo com segurador de ordem zero
Filtro de reconstrução é um filtro analógico adicionado na saída do conversor D/A com o intuito de eliminar as “escadas” feitas pelo hold. Este filtro pode ser eliminado do processo se necessário.
Sistema de condicionamento do atuador é um dispositivo parecido com o condicionador apresentado anteriormente e serve para alimentar, filtrar e amplificar o atuador.
Atuador é o dispositivo responsável por implementar a lei de controle no sistema físico, isto é, é o dispositivo que implementa fisicamente a lei de controle.
Figura 1.6: Componentes básicos de um sistema de atuação
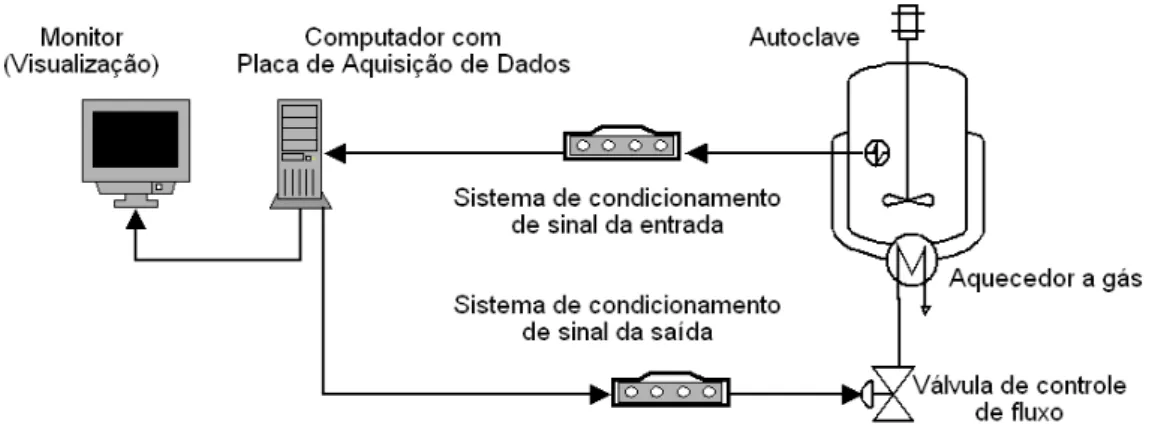
Exemplo 1.1: Controle de temperatura de uma autoclave
Figura 1.7: Sistema de monitoramento de temperatura em uma autoclave
Figura 1.8: Sistema de controle detalhado
1.3 Tipos de sinais
Sinais em analógico em tempo contínuos são sinais contínuos definidos em qualquer instante de tempo cuja amplitude varia continuamente neste intervalo. Figura 1.9(a).
Sinal em tempo contínuo quantizado é um sinal cuja amplitude só pode assumir valores pré-determinados. Figura 1.9(b).
Sinais discretizados são sinais que só podem assumir valores em determinados instantes de tempo. Figura 1.9(c).
Sinais discretizados e quantizados são sinais discretizados que só podem assumir determinados valores de amplitude. Figura 1.9(d).
(a) Sinal contínuo (b) Sinal contínuo quantizado
A Figura 1.9(a) representa um sinal analógico qualquer, enquanto que a Figura 1.9(d) representa um sinal visto por um sistema de aquisição de dados, isso significa que existirão erros entre a passagem de um sinal contínuo para um sinal discreto. Aqui o termo sinal contínuo ser referirá sempre ao sinal da Figura 1.9(a) enquanto que um sinal discreto ou em tempo discreto a um sinal igual ao da Figura 1.9(d).
Controle de sistemas em tempo discreto envolverá uma ou mais variáveis que só podem ser acessadas ou lidas em determinados instantes de tempo através de um processo de amostragem.
1.4 Amostragem de sinais contínuos
Este item será explicado como a amostragem de um sinal contínuo deve ser feito sem que haja perda de informação ou se cometa erros durante este processo.
O Processo de Amostragem de sinais contínuos substitui o sinal em tempo contínuo por uma seqüência de valores em tempo discreto. Este processo normalmente é seguido por um processo de quantização do sinal discreto.
1.4.1 Teoria da Amostragem – Tratamento empírico
A amostragem ou discretização de um sinal analógico é feita seguindo um determinado tempo de amostragem T, em segundos, ou freqüência de amostragem fa, dada em Hz. Sendo que,
fa 1 T=
Então, a amostragem é dada pela seguinte relação,
( )
∑
+∞(
)
−∞ =
− δ =
k
kT t ) t ( x kT
x k=0, 1, 2 ...
onde o delta de dirac extrai o valor da função no instante em que t = kT.
(a) sinal contínuo (b) Sinal amostrado
Para que um sinal contínuo possa ser corretamente discretizado, ele deve obedecer as regras imposta por Fourier, isto é, a maior freqüência contida no sinal a ser amostrado deverá obrigatoriamente ser menor que metade da freqüência de amostragem fa que é conhecida como freqüência de Nyquist fN. De modo geral, para uma boa aplicação de sistemas de controle, deve ser considerado pelo menos de 4 a 6 pontos por período da maior freqüência a ser amostrada para que o sistema de controle possa funcionar adequadamente.
Exemplo 1.3: Supor um sinal analógico com apenas uma freqüência igual a 400 Hz. Se a amostragem for feita com uma freqüência de amostragem fa = 1600 Hz. Pede-se:
a) Qual o tempo de amostragem? Solução:
O tempo de amostragem T é dados por, ms 625 . 0 1600 1 fa 1
T= = =
b) Quantos pontos por período? Solução:
Como o sinal contínuo tem f = 400 Hz e a amostragem foi feita em 1600 Hz, então o número de pontos por período é dado por,
Número de pontos por período n = 1600/400 = 4. c) Gráfico do sinal correto vs sinal amostrado
Figura 1.11: Sinal correto e sinal amostrado
Exemplo 1.4: Supondo um sistema massa-mola com m=0.5 kg e k = 100.000 N/m que será simulado em tempo discreto por uma senóide com freqüências de 65 e 85 Hz. Qual deverá ser o tempo de amostragem mínimo supondo 6 pontos por período?
Solução:
Para 6 pontos por período,
F = 65 Hz, então, 2.57 ms 65
1 6 1
T= =
F = 85 Hz, então, 1.96ms 85
1 6 1
s / rad 21 . 447 m k
n = =
ω significando que 71.18Hz
2 21 . 447
fn =
π
= , então
ms 35 . 2 18 . 71 1 6 1
T= =
Desta forma, terá de ser amostrado com o menor T, então, 1.96 ms.
1.4.2 Não unicidade de sinais amostrados
Supondo a Figura 1.12, observe que se a senoide de 400 Hz for amostrada com T = 2 ms isso representa uma freqüência de amostragem fa = 500 Hz e uma freqüência de Nyquist fN = 250 Hz. O sinal original de 400 Hz se rebate em Nyquist, representando uma freqüência aparente de 100 Hz.
Figura 1.12: Sinal contínuo e sinal amostrado incorretamente
Desta forma, não se pode amostrar um sinal cuja freqüência seja maior que a freqüência de Nyquist, para evitar este problema, os sinais devem ser filtrados por um filtro passa baixo para eliminar todas as freqüências do sinal acima de Nyquist.
Além disso, significa que uma vez o sinal tenha sido amostrado, não é mais possível recupera-lo completamente devido ao problema de amostragem. Por isso, a discretização do sinal deve ser feita com muito cuidado para obter o resultado final desejado.





![BANKS LEITE; GALVÃO [org.]. A educação de um selvagem as experiências pedagógicas de Jean Itard](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)