Universidade de Trás-os-Montes e Alto Douro
Desenvolvimento de uma palmilha
ortopédica em nanocelulose especí ca
do indivíduo
Dissertação de Mestrado em
Engenharia Mecânica
Paulo Marcelo Loureiro Monteiro
Orientação: José Manuel Cardoso Xavier
Co-orientação: Paula Luísa Nunes Braga Da Silva
Co-orientação: Sandra Cristina Correia Gonçalves Gagulic
Dissertação apresentada à Universidade Trás-os-Montes e Alto Douro para obtenção do grau de Mestre em Engenharia Mecânica, realizada sob orientação cientí ca de: Prof. José Manuel Cardoso Xavier (atualmente Prof. Auxiliar na Universidade NOVA de Lisboa), Paula Luísa Nunes Braga Da Silva e Sandra Cristina Correia Gonçalves Gagulic.
As opiniões e as informações apresentadas neste documento são da responsabilidade pessoal e exclusiva do autor, assim como o uso de quaisquer programas informáticos de apoio no desen-volvimento e análise do presente trabalho.
Agradecimentos
Ao Professor José Manuel Cardoso Xavier, o meu orientador, por me proporcionar desenvolver este tema, pela disponibilidade, ajuda e partilha de conhecimentos ao longo desta dissertação, assim como pela impressão 3D da palmilha ortopédica.
À Professora Paula Luísa Nunes Braga Da Silva, a minha co-orientadora, pelo encorajamento, interesse, preocupação e ajuda ao longo desta dissertação.
À Doutora Sandra Cristina Correia Gonçalves Gagulic, a minha co-orientadora, pelos conhe-cimentos, sugestões e esclareconhe-cimentos, bem como pelos fornecimento de dados necessários ao decorrer da realização desta dissertação.
Aos meus pais, por todo o apoio, conforto e paciência na realização desta dissertação, e por acreditarem em mim, o meu mais sincero obrigado.
Resumo
Os métodos mais utilizados nos dias de hoje, para o desenvolvimento de palmilhas ortopé-dicas personalizadas, requerem mão de obra quali cada e são altamente dependentes dos dados de entrada do indivíduo em estudo. Esse tipo de métodos consiste na criação de um molde da zona plantar do pé, onde com o uso de um scanner e um software CAD (Computer-Aided De-sign), é obtida a palmilha ortopédica especí ca do indivíduo, baseando-se no modelo geométrico 3D estático do pé.
A vantagem do presente estudo em relação a métodos frequentemente usados, é que permite obter uma palmilha ortopédica especí ca do indivíduo, recorrendo ao método de elementos nitos associado a métodos de otimização, sem que seja necessária mão de obra quali cada, dados de entrada e a presença do indivíduo no local.
Um modelo de elementos nitos do complexo pé-tornozelo constituído por tíbia, fíbula, 26 ossos do pé, tecidos moles e 72 ligamentos foi desenvolvido a partir de técnicas de tomogra a axial computorizada (TAC) de imagens médicas DICOM (Digital Imaging and Communications in Medicine). Estas imagens através do software de segmentação InVesalius e auxilío de um software CAD (SpaceClaim) permitiram criar uma geometria detalhada do complexo pé-tornozelo, suporte e palmilha.
A geometria criada foi importada para o ANSYSr onde foram de nidos contactos, propri-edades materiais, condições de fronteira e carregamentos. A pressão plantar foi obtida aplicando uma força de 350 N no suporte, que representa metade do peso do corpo do indivíduo em estudo, realizando compressão entre o pé e a palmilha. Simultaneamente, uma força de 175 N é aplicada no calcanhar para representação da força do tendão de Aquiles, enquanto o topo da fíbula, tíbia e tecidos moles se encontram xos.
Após se obter a pressão plantar, foi realizada a otimização da palmilha, onde com o auxilio de técnicas de otimização da superfície de resposta, se encontrou a forma ótima para a palmilha ortopédica em nanocelulose, de modo a distribuir melhor as pressões plantares e reduzir o pico de pressão.
Palavras-Chave
Biomecânica; Pé e tornozelo humano; Fáscia plantar; Palmilha ortopédica; Nanocelulose; Método de elementos nitos; Simulação; Experiências de projeto; Superfície de resposta; Otimização; Otimização da superfície de resposta,
Abstract
The most commonly used methods today for the development of customized orthopedic insoles require skilled labor and are highly dependent on the input data of the individual under study. This type of methods consists in the creation of a mold of the plantar area of the foot, with the use of a scanner and CAD (Computer-Aided Design) software, the orthopedic insole of the individual is obtained, basing in the static 3D geometric model of the foot.
The advantage of the present study in relation to frequently used methods is that it allows to obtain a speci c orthopedic insole of the individual, using the nite element method associated to optimization methods, without the need for skilled labor, input data and presence of the individual in the place.
A nite element model of the ankle-foot complex consisting of tibia, bula, 26 foot bones, soft tissues and 72 ligaments was developed using computed tomography (CT) techniques of DICOM (Digital Imaging and Communications in Medicine) medical images. These images through the InVesalius segmentation software and the aid of CAD software (SpaceClaim) allowed the creation of a detailed geometry of the ankle-foot complex, support and insole.
The created geometry is imported into ANSYSrwhere contacts, material properties, boun-dary conditions, and loads are de ned. The plantar pressure is obtained by applying a force of 350 N on the support, which represents half the body weight of the individual under study, performing compression between the foot and insole. Simultaneously, a force of 175 N is applied at the heel to represent the strength of the Achilles tendon, while the top of the bula, tibia and soft tissues are xed.
After the plantar pressure is obtained, the optimization of the insole is carried out, with the aid of response surface optimization techniques, the optimum shape for the orthopedic insole in nanocellulose is obtained, in order to better distribute the plantar pressures and reduce the peak pressure.
Keywords
Biomechanics; Human foot and ankle; Plantar fascia; Orthopedic insole; Nanocelulose; Finite element method; Simulation; Design of experiments; Response surface; Optimization; Response surface optimization;
Índice
1. Introdução 1
1.1. Considerações gerais . . . 1
1.2. Motivação e objetivos . . . 2
1.3. Estrutura da dissertação . . . 2
2. Anatomia, biomecânica e patologias do pé 4 2.1. Introdução . . . 4
2.2. Anatomia do pé . . . 4
2.2.1. Estrutura óssea . . . 5
2.2.2. Tendões, ligamentos e articulações . . . 6
2.2.3. Músculos . . . 9
2.2.4. Arcos plantares . . . 10
2.2.5. Posições relativas e movimentos do pé . . . 12
2.3. Relacionamento do controlo postural em relação à pressão plantar . . . 14
2.4. Patologias do pé . . . 15 2.4.1. Hallux valgus . . . 15 2.4.2. Fasceíte plantar . . . 16 2.4.3. Pé plano e pé cavo . . . 16 2.4.4. Neuroma de Morton . . . 17 2.5. Conclusões . . . 18
3. Mecânica computacional associada à biomecânica do pé 19 3.1. Introdução . . . 19
3.2. Obtenção da geometria do complexo pé-tornozelo . . . 23
3.3. Materiais . . . 23 3.3.1. Tecido ósseo . . . 23 3.3.2. Cartilagem . . . 24 3.3.3. Ligamentos . . . 24 3.3.4. Fáscia plantar . . . 25 3.3.5. Tendões . . . 25 3.3.6. Tecidos moles . . . 25 3.4. Malha . . . 26
3.5. Contactos e de nições geométricas . . . 27
3.6. Condições de fronteira e carregamentos . . . 28
4. Palmilha ortopédica 30 4.1. Introdução . . . 30 4.2. Formato . . . 30 4.3. Propriedades mecânicas . . . 31 4.4. Materiais . . . 32 4.4.1. Nanocelulose . . . 34
4.4.2. Propriedades mecânicas da nanocelulose . . . 37
4.4.3. Aplicações biomédicas da nanocelulose . . . 39
4.4.3.1. Engenharia dos tecidos . . . 39
4.4.3.2. Propriedades antibacterianas . . . 40
4.4.4. Toxicidade e biocompatibilidade da nanocelulose . . . 40
4.4.5. Processos de obtenção de nanocelulose . . . 41
4.4.5.1. Processo de obtenção de nanocelulose a partir de bactérias . . . 42
4.4.5.2. Processo de obtenção de nanocelulose a partir de madeira . . . . 43
4.4.6. Características e isolamento dos cristais de celulose . . . 44
4.4.6.1. Caracterização de nanocristais/micro bras de celulose . . . 44
4.4.6.2. Isolamento de agregados de bras celulósicas por ultrassonogra a 44 4.4.7. Nanocompósitos celulósicos . . . 46
4.4.7.1. Fabrico e caracterização dos nanocompósitos celulósicos . . . 46
4.4.7.2. Nanocompósitos celulósicos PVA com nano bras celulósicas . . . 47
4.4.7.3. Nanocompósitos celulósicos PVA com brilas celulósicas . . . 48
4.4.8. Uso da nanocelulose em palmilhas . . . 49
4.5. Conclusões . . . 49
5. Otimização estrutural 51 5.1. Introdução . . . 51
5.2. Otimização por dimensionamento . . . 52
5.3. Otimização de forma . . . 52
5.3.1. Otimização de forma baseada em elementos nitos . . . 53
5.3.2. Otimização de forma baseada em modelos geométricos . . . 53
5.4. Otimização topológica . . . 53
5.5. Otimização da superfície de resposta (ANSYSr) . . . . 54
5.5.1. Experiências de projeto . . . 54
5.5.1.1. Central Composite Design . . . 55
5.5.1.2. Latin Hypercube Sampling Design . . . 56
5.5.1.3. Optimal Space-Filling Design . . . 57
5.5.1.4. Box-Behnken Design . . . 59
5.5.1.5. Custom . . . 59
5.5.1.6. Custom+sampling . . . 59
5.5.1.7. Sparse Grid Initialization . . . 60
5.5.2. Superfície de resposta . . . 60
Índice 5.5.2.2. Kriging . . . 63 5.5.2.3. Non-Parametric Regression . . . 64 5.5.2.4. Genetic Aggregation . . . 66 5.5.2.5. Neural Network . . . 68 5.5.2.6. Sparse Grid . . . 69
5.5.3. Otimização da superfície de resposta . . . 70
5.5.3.1. Multi-Objective Genetic Algorithm . . . 70
5.5.3.2. Nonlinear Programming by Quadratic Lagrangian . . . 72
5.5.3.3. Mixed-Integer Sequential Quadratic Programming . . . 72
5.6. Conclusões . . . 73
6. Palmilha ortopédica otimizada em nanocelulose: análise computacional 74 6.1. Reconstrução da geometria do pé . . . 76
6.1.1. Obtenção da geometria primária através da segmentação de imagens TAC 76 6.1.2. Processo de reconstrução CAD . . . 77
6.2. Descrição da simulação . . . 81
6.2.1. De nições geométricas . . . 81
6.2.2. De nição das propriedades materiais . . . 81
6.2.3. Criação da malha de elementos nitos . . . 83
6.2.4. De nição de contactos . . . 84
6.2.5. Condições de fronteira e carregamentos . . . 87
6.2.6. Resultados da simulação inicial . . . 88
6.3. Processo de otimização da palmilha ortopédica . . . 89
6.3.1. Parametrização da palmilha . . . 89
6.3.2. Experiências de Projeto . . . 91
6.3.3. Superfície de resposta . . . 93
6.3.4. Otimização da superfície de resposta . . . 96
6.3.5. Resultados nais . . . 98
6.4. Protótipo da palmilha ortopédica otimizada . . . 99
7. Conclusões 100 7.1. Trabalhos futuros . . . 101
Referências 113 Apêndices 114 A. Formulação de elementos nitos 115 A.1. Elementos tetraédricos . . . 115
A.1.1. Funções de deslocamento . . . 115
A.1.2. Matriz de deformação . . . 117
A.1.3. Matriz de elasticidade . . . 118
A.2. Elementos hexaédricos . . . 119
A.2.1. De nição isoparamétrica . . . 119
A.2.2. Derivadas parciais das funções de forma . . . 120
A.2.3. Cálculo da matriz Jacobiana . . . 120
A.3. Elementos de treliça/LINK . . . 120 B. Dados especí cos do relatório da simulação estática nal 123
Índice de Figuras
2.1. Legenda da estrutura óssea do pé (Santos,2008). . . 5
2.2. Partes da estrutura óssea do pé (Caneta,2018). . . 6
2.3. Gastrocnémios, tendão de Aquiles e osso calcânio (adaptado deThorpesPhysiotherapy (2018)). . . 7
2.4. Fáscia Plantar (adaptado de Chiropractic(2018)). . . 7
2.5. Pé direito: vista medial (Tailandesa,2019). . . 8
2.6. Pé direito: vista lateral (Anatomia,2019). . . 8
2.7. Músculos extrínsecos do pé (Azevedo,2006). . . 10
2.8. Músculos intrínsecos do pé (Azevedo,2006). . . 10
2.9. Arcos longitudinal e transverso (Explosive,2018). . . 11
2.10. Forma e área de contacto do pé normal, chato e cavo (Diagnóstico,2018). . . 12
2.11. Planos sagital, frontal e transversal (adaptado deFootmaxx (2019)). . . 12
2.12. Hallux valgus (Vaktim,2018). . . 16
2.13. Fasceíte plantar (Pilates,2018). . . 16
2.14. Pé plano (Simulators,2018). . . 17
2.15. Pé cavo (Simulators,2018). . . 17
2.16. Neuroma de Morton (Dor,2018). . . 17
3.1. Fluxograma típico de um software CAE para teste e desenvolvimento de novos produtos (adaptado de Simeoni(2014)). . . 20
3.2. O processo da análise de elementos nitos (adaptado deBathe(2006)). . . 21
3.3. Pressão plantar (Cheung e Zhang,2005). . . 22
3.4. Tensões internas do pé (Antunes et al.,2008). . . 22
3.5. Estrutura óssea e cartilagens (adaptado deAntunes et al. (2008)). . . 24
3.6. Ligamentos (adaptado deCheung e Zhang(2006)). . . 24
3.7. Fáscia plantar (adaptado de Antunes et al.(2008)). . . 25
3.8. Malha do complexo pé-tornozelo (Cheung e Zhang,2006). . . 27
3.9. Representação tendão de Aquiles diretamente na geometria (Cheung et al.,2005). 28 3.10. Representação tendão de Aquiles por conectores axiais (adaptado deAntunes et al. (2008)). . . 28
3.11. Condições de fronteira e carregamentos para um indivíduo de 79 Kg (adaptado de Hsu et al. (2008)). . . 29
4.1. a) Palmilha ortopédica de suporte ao calcanhar (DHgate,2018). b) Palmilha orto-pédica de suporte ao arco plantar (Walmart,2018). c) Palmilha ortopédica meta-tarsal (Wantitall,2018). d) Palmilha ortopédica de contacto total (Levyandrappel,
2018). . . 31
4.2. Palmilha em silicone (Essentialaids,2018). . . 33
4.3. Palmilha em Plastazote (Material,2018). . . 33
4.4. Palmilha em cortiça (Clarity,2018). . . 34
4.5. Palmilha em plástico acrílico (Relief,2018). . . 34
4.6. Gel de nanocelulose (BillerudKorsnäs,2018). . . 35
4.7. Nanocelulose (escala nano) (Board,2018). . . 35
4.8. Tipos de celulose (Pesquisa,2018). . . 35
4.9. Decomposição de uma estrutura de celulose (Cheng et al.,2011). . . 36
4.10. Grá co das equações do modelo de Halpin-Tsai (Eichhorn et al.,2010). . . 39
4.11. NCC (Dammak et al.,2013). . . 42
4.12. NFC (World,2018). . . 42
4.13. Nanocelulose bacteriana (Klemm et al.,2006). . . 43
4.14. Método HIUS (adaptado deCheng et al.(2011)). . . 44
4.15. Valor de retenção da água (WRV) (Cheng et al.,2011). . . 45
4.16. Imagens SEM das bras e brilas Lyocell, tratadas 30 minutos, por HIUS (Cheng et al., 2011). . . 46
4.17. Imagens AFM das bras e brilas Lyocell, tratadas 30 minutos, por HIUS (Cheng et al., 2011). . . 46
4.18. Imagem AFM de nano bras de HP (Cheng et al.,2011). . . 48
4.19. Módulo de elasticidade PVA, os seus compósitos reforçados por MCC com e sem tratamento, e brilas MCC (adaptado de Cheng et al.(2011)). . . 49
5.1. Processo de otimização estrutural (adaptado de Sant'Anna e Fonseca(2002)). . . 52
5.2. Otimização topológica (adaptado deMüller et al.(1999)). . . 54
5.3. Distribuição das experiências de projeto no CCD (Innomet,2018). . . 56
5.4. Distribuição das experiências de projeto no LHSD (Innomet,2018). . . 57
5.5. Distribuição das experiências de projeto no OSFD (Innomet,2018). . . 58
5.6. Distribuição das experiências de projeto no BBD (Innomet,2018). . . 59
5.7. Distribuição das experiências de projeto no Custom+Sampling (Innomet,2018). . 60
5.8. Superfície de resposta (Bradley,2007). . . 61
5.9. Ajuste de uma linha de regressão para um grupo de pontos de amostra (Sharcnet, 2018u). . . 66
5.10. Neural Network (adaptado de Sharcnet(2018o)). . . 68
6.1. Fluxograma da análise computacional e otimização da palmilha ortopédica em nanocelulose. . . 75
6.2. Segmentação da estrutura óssea. . . 76
6.3. Segmentação dos tecidos moles. . . 77
Índice de Figuras
6.5. Antes e depois da reconstrução da estrutura óssea. . . 78
6.6. Tecidos moles. . . 78
6.7. Estrutura óssea, cartilagens, ligamentos e fáscia plantar. . . 78
6.8. Fáscia plantar. . . 79
6.9. Ligamentos plantares. . . 79
6.10. Ligamentos vista lateral. . . 79
6.11. Ligamentos vista lateral. . . 79
6.12. Palmilha plana. . . 80
6.13. Suporte. . . 80
6.14. Geometria nal do complexo pé-tornozelo, palmilha plana e suporte. . . 80
6.15. Secção transversal dos ligamentos. . . 81
6.16. Secção transversal da fáscia plantar. . . 81
6.17. Estrutura óssea, cartilagem, ligamentos, palmilha e suporte. . . 82
6.18. Geometria do complexo pé-tornozelo, palmilha e suporte. . . 82
6.19. Corte da malha de elementos nitos dos tecidos moles. . . 83
6.20. Malha de elementos nitos da estrutura óssea, ligamentos e fáscia plantar. . . 83
6.21. Malha de elementos nitos do complexo pé-tornozelo, palmilha e suporte. . . 83
6.22. Contactos entre os ossos e os tecidos moles de 1 a 10. . . 85
6.23. Contactos entre os tecidos moles e os ossos de 1 a 10. . . 85
6.24. Contactos entre os ossos e tecidos moles de 11 a 19. . . 85
6.25. Contactos entre os tecidos moles e os ossos de 11 a 19. . . 85
6.26. Contactos entre os ossos e cartilagens. . . 85
6.27. Contactos entre os ossos. . . 85
6.28. Contacto entre os tecidos moles e a palmilha. . . 86
6.29. Contacto entre a palmilha e o suporte. . . 86
6.30. Contactos entre os ossos e os ligamentos. . . 86
6.31. Contactos entre os ossos e a fáscia plantar. . . 86
6.32. Condições de fronteira e carregamentos. . . 87
6.33. Amplitude do deslocamento aplicado em D. . . 88
6.34. Amplitude da força aplicada em A. . . 88
6.35. Amplitude da força aplicada em B. . . 88
6.36. Convergência da simulação segundo o tempo e as equações de equilíbrio. . . 89
6.37. Pressão plantar (palmilha plana). . . 89
6.38. Tensão de von Mises na estrutura óssea (palmilha plana). . . 89
6.39. Parametrização da palmilha. . . 90
6.40. Palmilha inicial. . . 90
6.41. Experiências de projeto. . . 93
6.42. Superfície de resposta da pressão máxima segundo Z1 e Z2. . . 94
6.43. Superfície de resposta da pressão máxima segundo Z3 e Z4. . . 94
6.44. Superfície de resposta da pressão máxima segundo Z5 e Z6. . . 94
6.45. Superfície de resposta da pressão máxima segundo Z7 e Z8. . . 94
6.47. Superfície de resposta da pressão máxima segundo Z11 e Z12. . . 94
6.48. Superfície de resposta da pressão máxima segundo Z13 e Z14. . . 94
6.49. Superfície de resposta da pressão máxima segundo Z15 e Z16. . . 94
6.50. Superfície de resposta da pressão máxima segundo Z17 e Z18. . . 95
6.51. Sensibilidade das variáveis Z segundo a pressão plantar máxima. . . 95
6.52. Comparação dos valores obtidos das experiências de projeto com os valores pre-vistos da superfície de resposta. . . 96
6.53. Relação entre a pressão plantar máxima e o número de interações. . . 96
6.54. Palmilha ortopédica otimizada. . . 97
6.55. Pressão plantar (palmilha inicial). . . 98
6.56. Pressão plantar (palmilha otimizada). . . 98
6.57. Tensão de von Mises na estrutura óssea (palmilha inicial). . . 98
6.58. Tensão de von Mises na estrutura óssea (palmilha otimizada). . . 98
6.59. Impressão 3D da palmilha ortopédica otimizada. . . 99
A.1. Elemento tetraédrico de quatro nós e respetiva numeração nodal (adaptado de Felippa(2004)) . . . 115
A.2. Elemento tetraédrico de quatro nós e respetiva numeração nodal (adaptado de Zienkiewicz et al. (1977)) . . . 116
A.3. (a) Elemento hexaédrico de 8 nós. (b) Elemento hexaédrico de 20 nós. (c) Elemento hexaédrico de 27 nós. (d) Elemento hexaédrico segundo coordenadas naturais (adaptado de Felippa(2004)) . . . 119
Índice de Tabelas
2.1. Descrição dos movimentos do pé (Ctborracha,2018). . . 13
3.1. Coe cientes do material hiperelástico dos tecidos moles (Antunes et al.,2008). . . 26
4.1. Características das subcategorias da nanocelulose (Nunes,2014). . . 37
4.2. Comparação da celulose cristalina com outros materiais (Eichhorn et al.,2010). . 37
4.3. Propriedades mecânicas de algumas bras de celulose (Eichhorn et al.,2010). . . 38
4.4. Propriedades mecânicas dos fragmentos de gel de nanocelulose (Pires et al.,2017). 49 6.1. Propriedades materiais e tipos de elementos do modelo de elementos nitos. . . . 82
6.2. Valores de Z para a palmilha inicial. . . 90
6.3. Valores iniciais, máximos e mínimos das variáveis Z. . . 91
6.4. Resultados das experiências de projeto. . . 92
Simbologia
Símbolo Descrição Símbolos Gregos
φf Fração volumétrica do enchimento
θe Aumento médio da temperatura do elemento
θk Parâmetros desconhecidos usados para ajustar o modelo
ζ Fator de forma ω Domínio α Coe ciente de expansão σ Tensão Símbolos Latinos U Energia de deformação
Cij,Di Coe cientes das propriedades materiais dos tecidos moles ¯
I1,¯I2 Invariantes modi cadas de deformação ¯
λi Alongamento derivatório Jel Relação de volume elástico X, Y, Z Coordenadas do eixo cartesiano
XR, Y R, ZR Rotação das coordenadas do eixo cartesiano
L Comprimento
d Diâmetro
Ec Módulo de Young do compósito Ef Módulo de Young do reforço Em Módulo de Young da matriz
P Poder ultrassónico t Tempo T Temperatura C Concentração de bra F S Tamanho da bra ˆ
yens Previsão do conjunto ˆ
yi Previsão do metamodelo
NM Número de metamodelos usados wi Fator de peso do metamodelo
(continuação)
Símbolo Descrição
xj j −ésimo ponto de projeto
y(xj) Valor do parâmetro de saida em xj ˆ
yi,−j Previsão do i−ésimo metamodelo construído sem o j−ésimo ponto de projeto
NP Número de pontos de projeto
yi Valor do parâmetro de saída no ponto de amostra i − ésimo ˆ
yi Valor do modelo de regressão no ponto da amostra i − ésimo btci Vetor linha dos termos de regressão do modelo da superfície
de resposta na localização da amostra n
c o
Vetor dos parâmetros de regressão do modelo de regressão p número de parâmetros de regressão
Omax Valor máximo do parâmetro de saída Omin Valor mínimo do parâmetro de saída y(x) Função desconhecida de interesse f (x) Função polinomial de x
Z(x) Processo aleatório Gaussiano
R Matriz correlação
r(xi, xj) Correlação espacial da função entre quaisquer dois valores da amostra de N, x e xj
M Número de variáveis de projeto
xik,xkj Componentes de késimo dos pontos de amostra xi e xj
I Matriz identidade
u Estado de deslocamento num ponto
V Volume Ni Funções de forma ε Deformação ε0 Deformação inicial D Matriz elasticidade E Modulo de Young v Coe ciente de Poisson
Kije Submatriz geral ij da matriz de rigidez fe
i forças nodais devido a deformação inicial
J Matriz Jacobiana
txk
1,txk2,txk3 Coordenadas globais dos pontos nodais dos elementos decor-rem ao longo do tempo t
hk(r) Funções de interpolação
Índice de Tabelas
(continuação)
Símbolo Descrição
0s(r) Comprimento do arco no tempo 0 t
Acrónimos
Sigla Descrição
3D Three Dimensional
AFM Microscópio de força atômica
APDL ANSYS Parametric Design Language BBD Box-Behnken Design
CAD/CAE Computer-Aided Design/Engineering CCD Central Composite Design
DICOM Digital Imaging and Communications in Medicine DMA Análise dimensional mecânica
DOE Experiências de projeto DRX Difração Raio-X
DSC Calorimetria diferencial de varrimento DTG Termograma gravimétrico derivativo EVA Acetato de vinilo
FTIR Espectroscopia de infravermelhos por transformada de Fou-rier
GA Genettic Aggregation
HIUS Alta intensidade ultrassónica
HP Poplar hibrido
HU Unidades Houns eld
KKT Karush-Kuhn-Tucker
LHSD Latin Hypercube Sampling Design MCC Celulose microcristalina
MISQP Mixed-Integer Sequential Quadratic Programming MOGA Multi-Objective Genetic Algorithm
NCC Nanocristais de celulose NFC Nano bras de celulose
NLPQL Nonlinear Programming by Quadratic Lagrangian NPR Non-Parametric Regression
OSFD Optimal Space-Filling Design PCF Fibra de celulose pura
(continuação)
Sigla Descrição
PE Polietileno
PU Poliuretano
PVA Álcool polivinílico
RCF Regeneração de bra de celulose RM Ressonância Magnética
RMSE Root Mean Square Error
SEM Microscópio eletrónico de varrimento
SG Sparse Grid
SGI Sparse Grid Initialization SRS Standard Response Surface SSE Somatório do erro dos quadrados SSR Sumatório da regressão dos quadrados SST Soma total dos quadrados
STEP Standard for the Exchange of Product model data STL Standard Triangle Language
SVM Support Vector Method
TAC Tomogra a Axial Computorizada TEM Microscópio eletrónico de transmissão TGA Análise termo gravimétrica
VIF Fator de in ação de variação WAXD Ângulo amplo de difração Raio-X WRV Valor da retenção de água
1. Introdução
1.1. Considerações gerais
A fasceíte plantar e ulceração do pé diabético são as queixas mais comuns de pacientes com problemas no pé e tornozelo (Holewski et al., 1989;Selth e Francis,2000). Pacientes com neuropatia periférica relacionada aos diabetes são suscetíveis ao desenvolvimento de úlceras na superfície plantar do pé, o que frequentemente leva à hospitalização e amputação das extremi-dades inferiores (Cheung et al.,2005). Estas patologias são causadas devido à elevada pressão plantar provocada por proeminências ósseas, calos, deformidades estruturais ou calçado de má qualidade (Holewski et al.,1989).
Uma solução para diminuir a pressão plantar nos pés, passa pelo uso de palmilhas ortopé-dicas, estas reduzem a fasceíte plantar, mitigando a deformação na fáscia plantar, a pronação do pé e o arco plantar (Hsu et al.,2008). Palmilhas que fornecem o contacto total ao pé, potenciam a redução da pressão plantar e transferem a pressão do retropé para o mediopé com o objetivo de reduzir a fasceíte plantar (Hsu et al.,2008).
Nos dias de hoje, ferramentas computacionais, como o método de elementos nitos, faci-litam o conhecimento da biomecânica do pé devido às suas capacidades de modelação de estru-turas com geometria irregular e propriedades materiais complexas, consegue simular condições de fronteira e de carregamento em análises estáticas e dinâmicas (Cheung e Zhang,2005,2006). O método de elementos nitos consegue prever a distribuição de pressões entre o pé e os seus suportes, fornecendo dados de tensão externa e interna do complexo pé-tornozelo. A análise de elementos nitos permite realizar avaliações paramétricas e cientes de modo a se obter resulta-dos para a forma de uma palmilha e as suas modi cações materiais, sem que seja necessário a sua fabricação e teste diretamente no paciente (Cheung e Zhang,2005).
A combinação do método de elementos nitos com métodos de otimização, é uma ferra-menta e caz de simulação, que auxilia o desenvolvimento de componentes médicas ou implantes. A junção destes dois métodos permite estabelecer a relação entre a forma da palmilha e a tensão exercida no pé, com o objetivo de criar uma palmilha otimizada para aliviar as pressões plantares
(Hsu et al.,2008).
1.2. Motivação e objetivos
Esta dissertação tem como fundamento o desenvolvimento de uma palmilha otimizada em nanocelulose especí ca de um indivíduo com dados da pressão plantar. Estes dados são obtidos através da simulação pelo método de elementos nitos, composto pelo complexo pé-tornozelo, palmilha e suporte.
Os objetivos principais desta dissertação são:
• Construção tridimensional detalhada do complexo pé-tornozelo a partir de imagens médi-cas (DICOM) obtidas através de tomogra a axial computorizada (TAC), juntamente com operações de desenho assistido por computador (Computer-Aided Design, CAD).
• Obtenção de dados para pressão plantar através da simulação de um modelo de elementos nitos do complexo pé-tornozelo através das de nições de propriedades materiais, criação de uma malha, de nições geométricas, condições de fronteira e carregamentos.
• Desenvolvimento da palmilha otimizada em nanocelulose através das pressões plantares obtidas da simulação (Computer-Aided Engineering, CAE), em combinação com o método de otimização da superfície de resposta.
1.3. Estrutura da dissertação
A dissertação dividir-se-á em 8 Capítulos. No segundo capítulo é apresentada informação sobre o pé, a sua anatomia, mecânica e patologias associadas.
No terceiro capítulo é abordado o tema de elementos nitos associado à biomecânica do pé, onde é descrito o processo de criação de um modelo de elementos nitos de um pé, com base na literatura.
No quarto capítulo é discutido a palmilha ortopédica, a sua forma, propriedades necessárias, materiais, e a introdução da nanocelulose como possível material a ser usado em palminhas, de nindo as suas propriedades, origem, aplicações e processos de obtenção.
No quinto capítulo é abordada a otimização estrutural, os tipos de métodos que existem, e a descrição do método de otimização da superfície de resposta.
No sexto capítulo é descrito todo o processo para o desenvolvimento da palmilha otimizada em nanocelulose especí ca do indivíduo, desde a construção tridimensional do complexo
pé-1.3. Estrutura da dissertação
tornozelo, elaboração da simulação no software CAE, de modo a se obter os dados para a pressão plantar e aplicação do método de otimização da superfície de resposta.
No sétimo capítulo são realizadas as conclusões da dissertação e apresentação de propostas para trabalhos futuros.
pé
Neste capítulo serão abordados aspetos relativas à anatomia do pé, biomecânica e suas patologias.
2.1. Introdução
Para se construir um modelo tridimensional do pé, é necessário obter uma visão geral da anatomia deste, entender como os ossos, arcos plantares, tendões, ligamentos, articulações, músculos se comportam de maneira geral, assim como os movimentos que o pé realiza segundo os seus planos sagital, frontal e transverso.
O uso de uma palmilha ortopédica é fundamental no alívio das pressões plantares. Uma elevada pressão plantar está muitas vezes associada a patologias e a uma má postura por parte do indivíduo, tornando-se necessário entender as suas causas, sintomas e como estas in uenciam as pressões plantares.
2.2. Anatomia do pé
O pé humano é uma estrutura complexa, formada por músculos, numerosos ossos, liga-mentos e articulações, é responsável por suportar e distribuir o peso corporal, bem como reali-zar a propulsão, atuando como uma alavanca rígida que impulsiona o corpo durante a marcha (Ledoux e Hillstrom, 2001). Para a realização destas funções o pé necessita de possuir certas propriedades, nomeadamente um elevado grau de estabilidade e exibilidade para se adaptar a superfícies irregulares.
A artrocinemática normal e proprioceção no complexo pé-tornozelo in uenciam a capaci-dade dos membros inferiores atonarem forças de suporte do peso estático ou dinâmico (Donatelli, 1987). A extremidade inferior deve distribuir e dissipar a compressão, tração, forças de rotação e tensão de corte durante a fase de apoio na marcha. A distribuição inadequada destas forças leva
2.2. Anatomia do pé
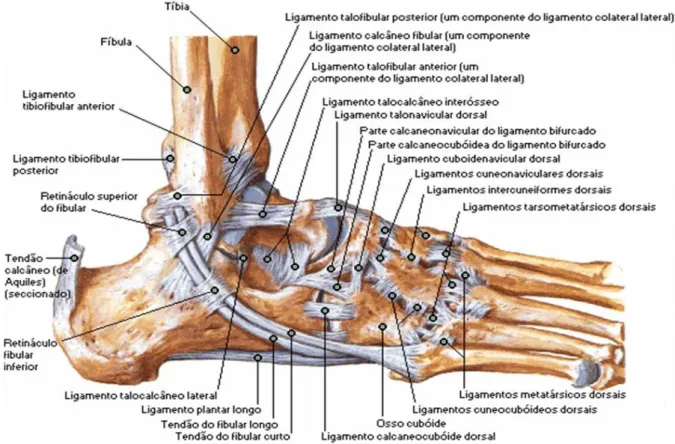
Figura 2.1.: Legenda da estrutura óssea do pé (Santos,2008).
a movimentos anormais do pé, o que leva a tensão excessiva, que eventualmente poderá causar danos nos tecidos moles e músculos (Donatelli,1987).
Em 1954 foi realizado um dos primeiros estudos antropométricos do pé humano a mais de 4000 indivíduos com idade superior a 18 anos, onde se analisaram 132 medidas de todo o corpo humano, sendo oito referentes ao pé, permitido assim obter as medidas antropométricas do pé, sendo elas, o comprimento deste, o comprimento do calcâneo até a cabeça do primeiro metatarso, perímetro das cabeças dos metatarsos, larguras do pé, do calcanhar, bimaleolar e alturas do maléolo lateral e maléolo medial (Ren et al.,2008).
2.2.1. Estrutura óssea
O pé humano (Figura 2.1) é constituído por 26 ossos, sendo estes, sete tarsais, cinco metatarsais e 14 falanges, 33 articulações, 19 músculos e 107 ligamentos (Chen et al.,2015b). O pé é formado por três partes fundamentais, antepé, mediopé e retropé, como se pode veri car na Figura 2.2. O antepé é constituído por cinco metatarsais, em cada um destes existem três ossos, nomeadamente a falange proximal, média e distal, com a exceção do primeiro metatarso
Figura 2.2.: Partes da estrutura óssea do pé (Caneta,2018).
que apenas é constituído por uma falange proximal e média. O mediopé é constituído por o osso navicular, cuboide e três cuneiformes. O retropé é formado pelo o tálus e calcâneo (Azevedo, 2006).
2.2.2. Tendões, ligamentos e articulações
O tendão é um conjunto de tecidos brosos que conectam os músculos aos ossos, o músculo quando contrai, puxa o tendão, o que faz mover o osso. O tendão de Aquiles (Figura 2.3) é o tendão maior e mais resistente do corpo humano, este insere-se no calcanhar e é o principal músculo que faz a exão plantar do pé, permitindo assim a propulsão, sendo assim o tendão mais importante durante a caminhada, corrida e salto. É formado no terço médio da parte posterior da tíbia e é junto por dois músculos localizados na barriga da perna, nomeadamente o gastrocnémios e sóleos (Bonnel et al.,1998;Web xfeet,2018).
Além do tendão de Aquiles, existe também o tendão tibial posterior, este junta um dos músculos mais pequenos da barriga da perna à parte inferior do pé, este tendão é responsável pelo suporte do arco do pé e ajuda-o a virar para dentro. Além deste, existe o tendão tibial anterior que permite erguer o pé, e os dois tendões bulares, localizados atrás do colo externo do tornozelo, que ajudam o pé a virar para fora (Bonnel et al.,1998;Web xfeet,2018).
As falanges do pé possuem tendões ligados, que permitem ao pé dobrar os dedos para baixo e endireitar os dedos, estes pequenos tendões estão localizados na parte inferior e superior
2.2. Anatomia do pé
Figura 2.3.: Gastrocnémios, tendão de Aqui-les e osso calcânio (adaptado de ThorpesPhysiotherapy(2018)).
Figura 2.4.: Fáscia Plantar (adaptado de Chiropractic(2018)).
do pé, perto dos dedos que eles controlam (Bonnel et al.,1998;Web xfeet,2018).
A fáscia plantar (Figura 2.4) é o ligamento mais longo e estabilizador do pé, começa na superfície plantar do calcâneo e estende-se até às superfícies plantares das cinco cabeças dos metatarsos e falanges proximais mantendo-os em conformidade, ajuda a manter o arco do pé estabilizado e resiste à torção do antepé em relação ao retropé durante a pronação (Bonnel et al., 1998;Web xfeet,2018).
Os ligamentos são bastante semelhantes aos tendões, a diferença é que estes em vez de conectarem um músculo a um osso, conectam um osso a outro osso. Os ligamentos são feitos de pequenas bras chamadas de colágeno, quando agrupados formam uma estrutura parecida com uma corda, a sua espessura determina o quão resistente é o ligamento. Uma das principais funções dos ligamentos é estabilizar e orientar a articulação subtalar durante o movimento. Estes ligamentos são classi cados pela sua localização na articulação talocrural ou subtalar, metatararsal e atepé (Bonnel et al.,1998;Web xfeet,2018).
Figura 2.5.: Pé direito: vista medial (Tailandesa,2019).
2.2. Anatomia do pé
As articulações presentes no antepé podem ser descritas por (Bonnel et al.,1998):
• Articulação metatarsofalangeana: encontra-se entre o metatarso e a falange proximal do dedo adjacente.
• Articulação interfalângica proximal: encontra-se entre a falange proximal e a falange média de cada dedo.
• Articulação interfalângica distal: encontra-se entre a falange média e a falange distal de cada dedo.
• A cabeça do metatarso que representa o m do metatarso, irá articular entre os ossos adjacentes.
As articulações presentes no mediopé podem ser descritas como (Bonnel et al.,1998):
• O quarto e o quinto metatarsos articulam com o osso da cuboide.
• O primeiro, o segundo e o terceiro metatarsos articulam com cada um dos respetivos cuneiformes.
• Os cuneiformes têm uma cápsula individual de articulação, mas todas estão envolvidas numa grande cápsula, formando assim a articulação de Lisfranc.
• As articulações talonavicular e calcaneocuboide formam juntas as articulações Chopart.
As articulações presentes no mediopé podem ser descritas como (Bonnel et al.,1998):
• A tíbia articula com a cúpula do tálus e transmite forças da perna para o tornozelo, esta articulação pode ser denominada de articulação tibiotalar.
• O tálus articula-se com o calcâneo por meio de uma articulação subtalar.
• A articulação subtalar é uma articulação de deslizamento, formada pela união do tálus com o calcâneo, a maior parte do movimento do tornozelo acontece nesta articulação, o restante movimento acontece na articulação tibiotalar.
2.2.3. Músculos
O pé tem na sua estrutura anatómica um conjunto de músculos que apresentam funções de manutenção da sua forma funcional e do apoio na execução de movimentos inerentes ao pé, ao nível da marcha e na realização de atividades quotidianas (Tábuas et al.,2012).
Figura 2.7.: Músculos extrínsecos do pé
(Azevedo,2006). Figura 2.8.: Músculos(Azevedo,2006intrínsecos). do pé
Os músculos do complexo pé-tornozelo são classi cados como, intrínsecos e extrínsecos, tendo como principal função manter a forma funcional do pé (Moura, 2011). Músculos extrín-secos (Figura 2.7) constituem a parte inferior da perna e possibilitam a realização dos vários movimentos inerentes ao pé, tendo funções relacionadas com a locomoção e o suporte de carga. Nos ajustes de equilíbrio e de postura, e em quase todos os movimentos coordenados do corpo, os músculos intrínsecos e extrínsecos agem em conjunto, e são até certo ponto inseparáveis (Azevedo, 2006;Moura,2011).
Os músculos intrínsecos (Figura 2.8) estão localizados no pé. A sua função principal é a de proporcionar uma fonte de força para a manutenção do arco longitudinal (Figura 2.9) e dar estabilidade aos ligamentos (Azevedo,2006;Moura,2011). Estes podem ser subdivididos em dois grupos, dorsais e plantares. Durante a locomoção, todos estes músculos dos membros inferiores, promovem ativamente estabilidade e balanço na fase de apoio, tendo um forte efeito de alavanca durante a propulsão (Moura,2011).
2.2.4. Arcos plantares
A estrutura do pé é dividida em dois arcos, um longitudinal (constituído por um arco medial e um lateral) e outro transverso (constituído por um arco proximal e um distal) (GOULD,1988; Man o, 2001). Os arcos do pé (Figura 2.9) são estruturas formadas pelos ossos metatarsais e tarsais, formando assim uma única estrutura através do reforço fornecido pelos ligamentos e tendões que os envolvem. Esta estrutura permite ao pé absorver e distribuir o peso do corpo. O
2.2. Anatomia do pé
Figura 2.9.: Arcos longitudinal e transverso (Explosive,2018).
peso é distribuído da perna para a zona do retropé, e transferido de seguida ao longo da região lateral do pé, através dos arcos plantares para a parte do antepé (Bonnel et al.,1998;Web xfeet, 2018).
O arco lateral é composto pela cuboide, calcanhar e quarto e quinto metatarsos. A sua cúpula localiza-se na articulação talocalcânea, e a sua articulação principal é a calcaneocuboide, que possui um mecanismo de bloqueio, e permite apenas um movimento limitado. As suas propriedades mais importantes são a sua solidez e a sua ligeira elevação (Bonnel et al., 1998; Web xfeet,2018).
O arco medial é composto pelos ossos, calcâneo, navicular, e terceiro e quarto metatarsos. A sua cúpula localiza-se na face superior da articulação do tálus, e as suas duas extremidades, as quais repousa o pé, são a tuberosidade, a superfície plantar posterior do calcâneo e as cabeças do primeiro, segundo e terceiro metatarsos. As principais características são, a sua elasticidade, que é determinada pela sua altura e número de pequenas articulações entre os seus constituintes (Bonnel et al.,1998;Web xfeet,2018).
O pé humano é uma das regiões do corpo que mais sofre alterações anatómicas, devido à deformação do arco longitudinal medial durante a fase de apoio. O arco longitudinal medial realiza funções essenciais na biomecânica do pé, como ação de suporte e absorção de impactos durante a marcha (Cavanagh e Rodgers,1987;Morioka et al.,2005).
Existem três tipos de classi cações para o pé humano (Figura 2.10) em função do seu arco plantar, nomeadamente o pé normal, pé plano ou chato e o pé cavo. De acordo com Man o (2001), o pé plano apresenta uma diminuição muito elevada ou o desaparecimento do arco longitudinal medial, já o pé cavo apresenta um aumento do arco longitudinal medial.
Figura 2.10.: Forma e área de contacto do pé normal, chato e cavo (Diagnóstico,2018).
Figura 2.11.: Planos sagital, frontal e transversal (adaptado de Footmaxx(2019)).
2.2.5. Posições relativas e movimentos do pé
O movimento do pé ocorre segundo os planos sagital, frontal e transversal (Figura 2.11), onde, a abdução e adução ocorrem no plano transversal, dorsi exão e exão plantar ocorrem no plano sagital, e a enversão e inversão ocorrem no eixo frontal, como se pode consultar na Tabela 2.1 (Ctborracha,2018).
2.2. Anatomia do pé
Tabela 2.1.: Descrição dos movimentos do pé (Ctborracha,2018).
Movimento De nição
• Abdução: movimento que ocorre no plano transversal quando o
pé roda lateralmente para fora. Os eixos de rotação situam-se nos planos frontal e sagital.
• Adução: movimento que ocorre no plano transversal quando o pé
roda lateralmente para dentro. Os eixos de rotação situam-se nos planos frontal e sagital.
• Dorsi exão: movimento do plano sagital, quando o pé se move
para cima (na direção da tíbia). Os eixos de rotação situam-se nos planos frontal e transversal.
• Flexão plantar:: movimento do plano sagital, quando o pé se
move para o solo. Os eixos de rotação situam-se nos planos frontal e transversal.
• Inversão: movimento do plano frontal, com rotação dos calcâneos
para dentro e para cima. Os eixos de rotação situam-se nos planos transversal e sagital.
• Eversão: movimento do plano frontal, com rotação dos calcâneos
para fora e para cima. Os eixos de rotação situam-se nos planos transversal e sagital.
• Pronação: É um movimento de rotação interna excessivo, criado
durante o ciclo biomecânico. Este movimento origina uma elevada pressão e tensão nos músculos, tendões e ligamentos. Durante a execução deste movimento, o pé é capaz de absorver choques e de se adaptar ao tipo de terreno e suas irregularidades (terreno plano, subidas, descidas, duro, macio, e irregular).
• Supinação: Movimento de rigidez excessiva no ciclo biomecânico,
em que o pé não consegue rodar su cientemente para dentro de forma a distribuir as forças pelas arcadas, criando muita tensão no membro inferior. Durante a execução deste movimento, a estrutura do pé é capaz de estabilizar-se, elevar-se e propulsionar o corpo.
2.3. Relacionamento do controlo postural em relação à pressão
plantar
Nos últimos anos, as alterações posturais têm vindo a ser alvo de grandes preocupações, não só pela parte ligada à estética, mas principalmente pela qualidade de vida dos indivíduos a longo prazo. Uma postura correta proporciona e contribui para uma melhor mobilidade articular e exibilidade corporal (Martins e Castro,2014). Uma postura correta consiste no alinhamento do corpo com uma e ciência siológica e biomecânica máxima, o que minimiza as tensões e pressões plantares sofridas no sistema de apoio, devido aos efeitos da gravidade. O controlo postural tem dois objetivos: o equilíbrio postural e a orientação postural (Martins e Castro, 2014).
O equilíbrio postural está relacionado com o controlo da relação entre forças externas (força gravítica, por exemplo) que agem sobre o corpo, e forças internas (como os movimentos articulares), que são produzidas pelo corpo. O equilíbrio corporal é alcançado quando todas as forças que atuam no corpo, tanto externas como internas, estão controladas, o que permite que o corpo permaneça na posição desejada (equilíbrio estático) ou que se mova de uma forma controlada (equilíbrio dinâmico) (Martins e Castro,2014).
A orientação postural está relacionada com o posicionamento e o alinhamento entre os seg-mentos corporais e em relação ao ambiente. Este posicionamento e alinhamento, são alcançados através de ações coordenadas dos vários grupos musculares responsáveis por essa manutenção (Martins e Castro,2014).
O pé possui um papel muito importante na postura e no controlo postural visto que é o primeiro membro, e com maior duração, que estabelece contacto do corpo com o solo. Assegura a posição bípede, recebe e distribui toda a carga corporal, devendo satisfazer as demandas de estabilidade, obtendo uma base estável para diversas variações posturais, e certi ca que a des-carga de peso não provoque uma desnecessária atividade da musculatura. A postura do pé é de extrema importância para um bom controlo postural. A análise da distribuição plantar tornou-se assim alvo de diversos estudos com o intuito de analisar a forma como se encontra distribuída a pressão ao nível do pé (Martins e Castro,2014).
O conhecimento da distribuição da pressão plantar, torna possível o desenvolvimento de um dispositivo, como uma palmilha ortopédica, que permite a correção e prevenção de doenças dire-tamente relacionadas com uma má postura-palmilha. Outros estudos realizados nesta área, per-mitiram igualmente concluir que a utilização precoce de uma palmilha ortopédica terá um efeito mais e caz do que a sua aplicação apenas quando atingida a idade adulta (Martins e Castro,
2.4. Patologias do pé
2014).
Em alguns casos, a distribuição das pressões plantares sofre in uência e altera-se em função da anatomia do pé (Morioka et al.,2005). Para isso, estudos biomecânicos (Ledoux e Hillstrom, 2002;Putti et al.,2008) têm sido importantes para identi cação e compreensão dos fatores predis-ponentes a alterações na distribuição da pressão plantar. Portanto, faz-se necessário estabelecer algumas relações entre parâmetros antropométricos e comportamento da distribuição da pressão plantar, em função da frequente alteração observada na antropometria do pé e a coexistência de altas pressões plantares, muitas vezes associadas a patologias (Bacarin,2006).
2.4. Patologias do pé
O pé humano é considerado uma das estruturas biomecânicas do corpo humano com maior complexidade e a única que atua em parceria com uma superfície externa. Este, graças às suas características, proporciona ao corpo humano uma base estável que confere de forma e ciente não só o suporte e equilíbrio numa fase de apoio, como também uma estabilidade adequada durante o processo da marcha. Contudo, devido à atuação constante de diferentes forças ao nível da superfície plantar, a funcionalidade do pé ca por vezes de tal forma comprometida que de-sencadeia alterações na distribuição da pressão plantar e consequentemente gera o aparecimento de patologias e deformidades plantares (Abboud,2002;Monteiro et al.,2010;Putti et al.,2008). Nesta secção serão apresentadas algumas patologias do pé, pois a palmilha ortopédica não só é indicada para ajudar a população comum a aliviar a pressão plantar, mas também como auxílio à prevenção ou alivio de dor em pés problemáticos.
2.4.1. Hallux valgus
A palavra "hallux" refere-se ao dedo grande do pé. Como o "hallux" se desvia do seu eixo apontando para o dedo mínimo, falamos de um desvio "valgo", criando uma saliência óssea no pé, que é também conhecida como "joanete" (Cuf,2018a).
O desequilíbrio entre as estruturas ósseas (Figura 2.12), os ligamentos e os tendões con-diciona um aumento progressivo da deformidade, que se vai agravando ao longo de vários anos, por vezes décadas.
Alguns sintomas da doença Hallux valgus são (Cuf,2018a):
• Falta de espaço para a saliência medial do dedo grande do pé dentro do sapato, o que cria atrito e in amação.
Figura 2.12.: Hallux valgus (Vaktim,2018). Figura 2.13.: Fasceíte plantar (Pilates,2018).
• Alguns pacientes têm apenas um pequeno desvio, com transtorno e dor durante as ativi-dades quotidianas.
2.4.2. Fasceíte plantar
A fasceíte plantar (Figura 2.13) é um problema ortopédico comum, que pode causar di -culdade em suportar o peso devido ao desconforto signi cativo. A etiologia da fasceíte plantar pode ser dividida em diferentes fatores, incluindo o aumento da idade, estar na posição de pé durante um longo período de tempo, aumento do peso corporal e exercício intensivo (Hsu et al., 2008).
O principal sintoma da fasceíte plantar é a dor intensa ao longo da superfície plantar.
2.4.3. Pé plano e pé cavo
O pé plano (Figura2.14) e o pé cavo (Figura2.14) são patologias que resultam de variações anatómicas dos tipos de arco dos pés. Essas variações são, normalmente, hereditárias e podem originar lesões nos pés, principalmente a quem pratica desporto. Podem também estar relaci-onados com malformações ósseas ou com o aparecimento de ossi cações anómalas (Podologia, 2018).
Os pés planos têm arcos menores, uma maior área de apoio, e cam praticamente com toda a base plantar em contacto com o solo. Os pés cavos possuem um arco maior, têm uma área de apoio menor e as pressões são concentradas no calcanhar e nos metatarsos. Estes são muito comuns em crianças, devido ao facto do pé ainda estar em formação, tendendo a car normal a partir da primeira década de vida (Podologia,2018).
2.4. Patologias do pé
Figura 2.14.: Pé plano (Simulators,2018). Figura 2.15.: Pé cavo (Simulators,2018).
Figura 2.16.: Neuroma de Morton (Dor,2018).
2.4.4. Neuroma de Morton
Neuroma de Morton é uma doença que pode ser descrita como uma "irritação" e/ou "in-chaço" do nervo sensitivo localizado perto das cabeças dos metatarsos, entre dois dedos do pé. O neuroma é mais comum no terceiro espaço intermetatarsiano entre o 3◦ e 4◦ metatarsos (Figura
2.16). Esta doença causa uma "irritação" devido a fatores mecânicos externos, tais como bursite, artrite, artrose metatarso-falângica e sobrecarga mecânica (Cuf,2018b).
Algumas das causas do neuroma de Morton são (Cuf,2018b):
• Dor plantar intensa, descrita como uma espécie de descarga elétrica entre dois dedos;
• Formigueiros e adormecimento (parestesias) nos dedos inervados pelo nervo sensitivo afe-tado.
2.5. Conclusões
Sabe-se agora como os ossos, arcos plantares, tendões, ligamentos, articulações, músculos se comportam, sendo estas informações cruciais no momento de criação do modelo tridimensional do pé, de modo a que este seja o mais aproximado do pé real possível.
O facto de se entender as posições relativas e movimentos do pé, será um dado importante na altura de colocar o pé na posição inicial, e na aplicação correta das forças e condições de fronteira, fazendo com que este se mova de acordo com os movimentos reais do pé.
Compreende-se a in uência que uma má postura e patologias do pé têm na pressão plantar, e como estas podem ser tratadas ou evitadas com o uso de palmilhas ortopédicas.
3. Mecânica computacional associada à
biomecânica do pé
Neste capítulo será discutido o uso de métodos de simulação, mais precisamente o método de elementos nitos, associado à biomecânica do pé, e como este se pode tornar importante no desenvolvimento e teste de novos produtos, de apoio à prática clínica.
3.1. Introdução
Nos dias de hoje, os engenheiros mecânicos possuem a vantagem de recorrer a softwares computacionais (Computer-Aided Engineering, CAE), para simular o desempenho de um deter-minado produto, de forma a melhorar o seu design ou então auxiliar na resolução de problemas de engenharia nas mais diferentes indústrias (Caelynx,2019).
Através do uso de um software CAE (Figura 3.1), o custo para o desenvolvimento de um determinado produto pode ser reduzido drasticamente. Com a implementação CAE no início do ciclo de desenvolvimento, com a criação do modelo geométrico, associado às propriedades físicas do modelo, bem como condições de fronteira e carregamentos, permitem que o produto seja guiado na direção correta, pois, quando algum erro é cometido no decorrer do projeto, é possível realizar alterações sem quaisquer custos, e sem que seja necessário o teste físico do produto através do desenvolvimento de protótipos (Caelynx,2019;Siemens,2019).
A área de mecânica computacional tem ganho impulso pela disponibilidade de computado-res potentes a preços acessíveis. Os computadocomputado-res pessoais atuais têm o poder computacional de um supercomputador de hà 20 anos. A simulação numérica está ao alcance de qualquer empresa, desde que tenha o software e os recursos humanos adequados (Devloo,2018).
Os recursos humanos necessários para o desenvolvimento da área de mecânica computaci-onal são diversos: precisa-se de investigadores para o desenvolvimento de modelos matemáticos para fenómenos físicos, de investigadores para aproximar esses modelos com algoritmos de ele-mentos nitos, de investigadores para o desenvolvimento de softwares e de engenheiros para utilizar esses softwares e tirar conclusões adequadas. Trata-se, por motivos óbvios, de uma área
Figura 3.1.: Fluxograma típico de um software CAE para teste e desenvolvimento de novos pro-dutos (adaptado de Simeoni(2014)).
multidisciplinar de investigação, na qual engenheiros de todas as áreas de atuação, matemáticos e cientistas de computação colaboram numa área comum (Devloo,2018).
O método de elementos nitos é uma ferramenta numérica poderosa usada para resolver problemas complexos em engenharia. Este método acomoda problemas com diversas geometrias, materiais e sistemas de carregamento. É um método genérico usado em domínios cientí cos multidisciplinares, incluindo a análise de estruturas, sólidos e uidos, sendo indispensável por parte da análise e modelação em engenharia (Bathe,2006). Este método foi inicialmente desen-volvido com base na física para a análise de problemas na mecânica das estruturas. Entretanto, foi veri cado que este método poderia ser usado em outras áreas para a solução de outros tipos de problemas (Bathe,2006).
O desenvolvimento do método dos elementos nitos para a solução de problemas práticos na engenharia teve um crescimento acentuado nos últimos anos. A aplicação deste método passa pelo estabelecimento de sistemas de equações diferenciais e algébricas e o seu cálculo ou solução numérica. Este é um processo exclusivamente feito a partir de processos computacionais que proporcionam uma rapidez e e cácia na solução para o problema. Para que a solução para
3.1. Introdução
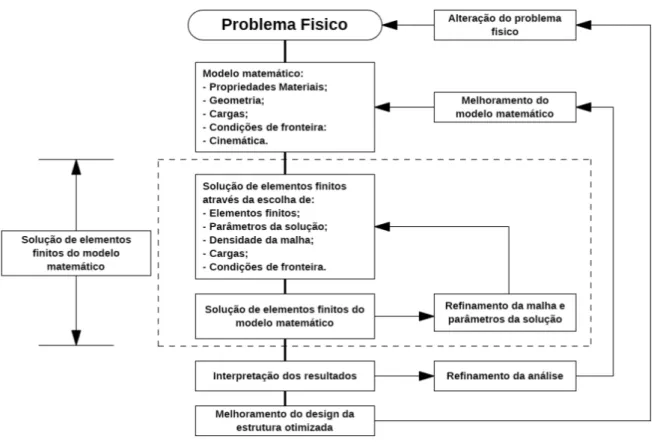
Figura 3.2.: O processo da análise de elementos nitos (adaptado deBathe (2006)).
o problema matemático ocorra com o melhor resultado possível, é necessário ter em conta a precisão desta técnica, se o critério de precisão não for estabelecido, a solução numérica terá de ser repetida com o re namento dos parâmetros estabelecidos para a solução, como por exemplo o re namento da malha de elementos nitos, até que a precisão desejada seja alcançada (Bathe, 2006). O processo de análise do método de elementos nitos pode ser consultado no diagrama da Figura 3.2.
Através da análise só é possível obter conhecimento sobre o problema físico considerado, não é possível prever a resposta exata do problema físico, porque é impossível reproduzir até nos modelos matemáticos mais detalhados, toda a informação presente na natureza e assim sendo contida no problema físico (Bathe,2006).
Um dos desa os principais da implementação do modelo de elementos nitos na prática clínica nos dias de hoje é o desenvolvimento de técnicas áveis e rentáveis para o objetivo especí- co da modelação 3D do pé. Investigadores mencionam que fatores biomecânicos têm um papel principal no tratamento e prevenção de muitas patologias do pé, por essa razão é de extrema importância perceber inicialmente a biomecânica associada ao pé normal antes de recorrer a palmilhas ortopédicas ou intervenções cirúrgicas (Cheung e Zhang,2006).
Figura 3.3.: Pressão plantar (Cheung e Zhang,2005).
Figura 3.4.: Tensões internas do pé (Antunes et al.,2008).
Ao longo das últimas décadas, a modelação por elementos nitos tem sido bastante usada para obtenção de conhecimentos ao nível do pé e calçado biomecânico. Contudo, a sua contribui-ção para o melhoramento no tratamento de diferentes patologias do pé, tal como o pé diabético, permanecem relativamente limitados (Cheung e Zhang,2006). O conhecimento do efeito da con-formidade dos tecidos moles, características na distribuição da tensão na superfície plantar do pé e estrutura óssea é essencial para alcançar um tratamento adequado e individualizado, para um projeto ortopédico (Cheung et al.,2005).
Informações sobre a deformação e tensão do pé humano e distribuição plantar, quando este está sobre carregamento é útil para o melhoramento e conhecimento biomecânico do pé. Métodos computacionais, como é o caso do método de elementos nitos permitem a medição plantar e medição direta interna, através da construção de um modelo 3D realista do pé com imagens médicas associadas a de nições corretas de materiais, condições de fronteira e carregamentos, permitem obter uma análise de previsão de pressões (Figura 3.3) que podem trazer informações adicionais como tensões e deformações internas do pé (Figura 3.4) (Cheung et al.,2005).
Para a modelação de elementos nitos do complexo pé-tornozelo é necessário compreender e relacionar a anatomia do pé com o software de simulação CAE, de modo a se obter o compor-tamento mais realista possível para o complexo pé-tornozelo, alcançando assim resultados mais aproximados para a pressão plantar e tensões internas do pé.
Torna-se necessário recorrer à literatura para se entender de forma geral, como alguns autores conseguem simular o comportamento do complexo pé-tornozelo, através da construção do modelo geométrico, atribuição de propriedades mecânicas, criação da malha de elementos nitos, contactos, de nições geométricas, condições de fronteira e carregamentos.
3.2. Obtenção da geometria do complexo pé-tornozelo
3.2. Obtenção da geometria do complexo pé-tornozelo
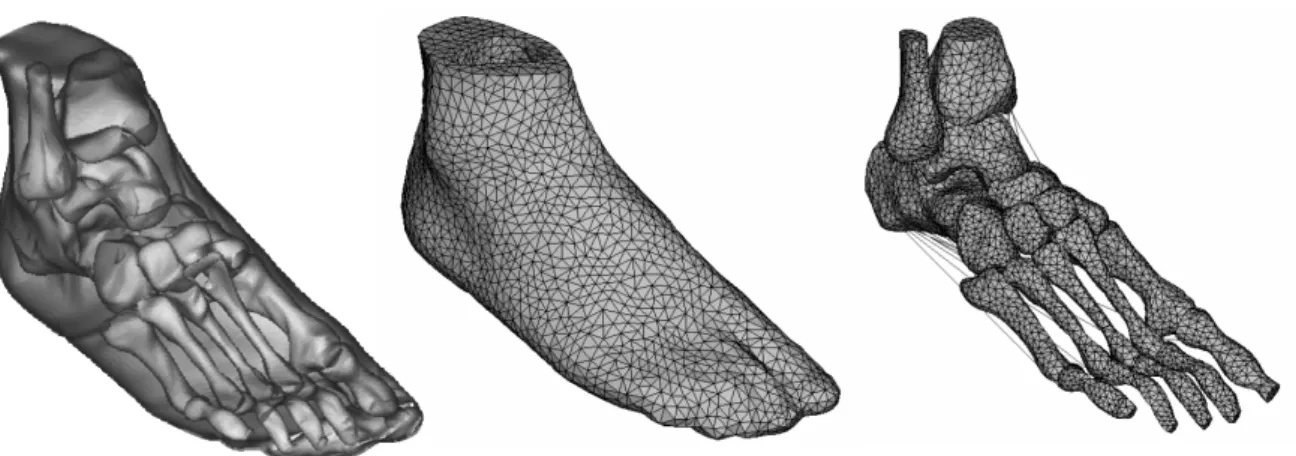
Nos dias de hoje existem dois métodos que permitem a obtenção da representação realista da geometria do pé. O primeiro baseia-se em que a geometria é diretamente de nida com base em imagens médicas através de um processo de segmentação e reconstrução. Estudos anteriores revelam que a modelação do pé através de elementos nitos é obtida por imagens raio-X, mas quase todos os estudos publicados a partir do ano 2000 foram baseados em imagens de tomogra a axial computorizada (TAC) e ressonância magnética (RM) (Behforootan et al., 2017). O segundo método consiste em representar o pé de forma simpli cada, assume algum tipo de simetria e simula os tecidos do pé usando geometrias básicas, como esferas, cilindros, entre outros (Behforootan et al.,2017).
Modelos realistas de todo o pé são normalmente obtidos de imagens TAC, que se adequam mais para a reconstrução da estrutura óssea, enquanto que imagens por RM conseguem obter um melhor desempenho para a reconstrução dos tecidos moles. As imagens TAC em combinação com as imagens de RM formam um modelo mais detalhado e consequentemente mais realista.
A reconstrução 3D a partir de imagens médicas consiste na segmentação de diferentes te-cidos, como músculos, ossos, tecidos moles, ligamentos, entre outros, num conjunto de imagens sequenciais que correspondem às diferentes secções do pé. Em quase todos os casos este processo foi obtido através semi-automáticos ou manuais que usam softwares especializados para recons-trução 3D a partir de imagens médicas, tais como InVesalius, Mimics, ScanIP, 3D Slicer, entre outros, tratando-se de uma tarefa bastante complexa e intensiva (Behforootan et al.,2017).
3.3. Materiais
3.3.1. Tecido ósseo
Em estudos anteriores, as propriedades mecânicas para o tecido ósseo (Figura 3.5) foram consideradas como material linear homogéneo elástico ou como rígido, com um módulo de Young a variar entre 7000 a 15000 MPa. Os valores mais comuns são um módulo de Young de 7300 MPa e um coe ciente de Poisson de 0.3 (Antunes et al.,2008;Cheung et al.,2006). Estes valores foram obtidos através da média dos valores da elasticidade presentes nos ossos cortical e trabecular de acordo com a sua dimensão volumétrica (Nakamura et al.,1981;Zheng et al.,2000).
Figura 3.5.: Estrutura óssea e cartilagens (adaptado de Antunes et al. (2008)).
Figura 3.6.: Ligamentos (adaptado de Cheung e Zhang(2006)).
3.3.2. Cartilagem
É atribuído à cartilagem (Figura3.5) em estudos anteriores um módulo de Young de 1 a 12 MPa. Esta pode ser simulada como material hiperelástico (Fontanella et al.,2014) ou como material viscoelástico (Bandak et al.,2001). Da literatura consultada os dados mais frequentes são, um módulo de Young de 10 MPa e um coe ciente de Poisson de 0.1 (Athanasiou et al., 1998;Gefen,2003;Jacob e Patil,1999).
3.3.3. Ligamentos
Na maioria dos estudos anteriores refere-se que, os ligamentos (Figura 3.6) são linea-res elásticos com um módulo de Young de 11.5 a 1500 MPa. Note-se que o comportamento não linear dos ligamentos pode ser de nido através de uma função polinomial de 5a ordem (Gefen e Seliktar, 2004), um modelo viscoelástico (Wang et al., 2014) ou como bra reforçada visco-hiperelástica (Forestiero et al.,2015). O valor mais comum para o módulo de Young é de 260 MPa (Cheung e Zhang,2006;Cheung et al.,2005). Os ligamentos foram representados em alguns estudos como elementos de treliça que apenas realizam tração (incompressível), com uma área de secção transversal de 18.4 mm2 (Cheung e Zhang,2006;Cheung et al.,2006;Hsu et al.,
3.3. Materiais
Figura 3.7.: Fáscia plantar (adaptado deAntunes et al. (2008)).
3.3.4. Fáscia plantar
A simulação da fáscia plantar (Figura3.7) foi tida especialmente em conta na modelação dos ligamentos na maior parte dos estudos, foram tidas em contas propriedades mecânicas di-ferentes relativamente aos restantes ligamentos (Behforootan et al., 2017). O valor típico para módulo de Young da fáscia plantar é de 350 MPa (Cheung et al.,2005;Wright e Rennels,1964). A fáscia plantar foi representada em alguns estudos como elementos de treliça que apenas realizam tração (incompressível), com uma área de secção transversal de 58.6 mm2(Cheung e Zhang,
2006;Cheung et al.,2006;Hsu et al.,2008).
3.3.5. Tendões
Os tendões foram simulados em alguns estudos como material linear elástico, com um módulo de Young de 15 a 1200 MPa (Behforootan et al.,2017).
3.3.6. Tecidos moles
A simulação dos tecidos moles foi considerada na maior parte dos estudos anteriores como um volume de tecidos moles para simular o comportamento mecânico, que resulta na combinação de pele, tecidos moles, músculo e gordura (Cheung et al., 2005). Em outros estudos, a pele e gordura foram combinados num único volume, enquanto que os músculos foram simulados separadamente (Bandak et al.,2001), ou ocorreu a junção da gordura e músculo e simularam a pele separadamente (Fontanella et al., 2014). Alguns autores (Jacob e Patil, 1999) consideram os tecidos moles como um material linear elástico incompressível, com um módulo de Young de 0.15 a 1.15 MPa, e um coe ciente de Poisson de 0.45 a 0.49.
Tabela 3.1.: Coe cientes do material hiperelástico dos tecidos moles (Antunes et al.,2008).
C10 C01 C20 C11 C02 D1 D2
0.08556 -0.05841 0.03900 -0.02319 0.00851 3.65273 0
Outros autores simulam os tecidos moles como um modelo de material hiperelástico, este comportamento não linear elástico foi baseado em testes in vivo de tensão-deformação no cal-canhar (Cheung et al.,2005;Lemmon et al., 1997). O comportamento mecânico não linear dos tecidos moles é de nido por um modelo hiperelástico baseado numa função polinomial de 2a ordem de energia de deformação (Cheung et al.,2005;Lemmon et al.,1997) dada por:
U = 2 X i+j=1 Cij( ¯I1− 3)i( ¯I2− 3)j+ 2 X i−1 1 D(Jel− 1) 2i (3.1)
em que U é a energia de deformação por unidade de volume de referência, Cij Di são propri-edades mecânicas obtidas através de ensaios in vivo, Jel representa a matriz Jacobiana e ¯I1 e
¯
I2 representam os invariantes modi cados de deformação (¯λ) e são de nidas por (Cheung et al.,
2005;Lemmon et al.,1997): ¯ I1= ¯λ21+ ¯λ22+ ¯λ23 I¯2 = ¯λ−21 + ¯λ −2 2 + ¯λ −2 3 (3.2)
Os coe cientes do material hiperelástico que permitem simular os diferentes tipos de rigidez presentes nos tecidos moles podem ser consultados na Tabela 3.1.
3.4. Malha
Alguns estudos feitos anteriormente no âmbito da reconstrução 3D do pé humano mencio-nam o número e tipo de elementos que usaram para construir a malha de elementos nitos (Figura 3.8). Em alguns estudos foram necessários apenas 36000 elementos (Luboz et al.,2014) para o modelo 3D do pé inteiro, enquanto em alguns casos pode alcançar a dimensão de 400000 elemen-tos (Chen et al.,2015a). Devido a este número elevado de elementos e à sua análise não linear, torna-se evidente que a grande desvantagem deste tipo de reconstruções 3D, é o custo computa-cional a ser realizado (processos de simulação, propriedades mecânicas, contactos,carregamentos, etc.) que pode levar semanas até que seja concluído pelo programa de simulação.
Em alguns estudos a malha de elementos nitos foi criada especi camente para algumas áreas do pé, reduzindo assim o custo computacional necessário para levar a cabo a análise.
3.5. Contactos e de nições geométricas
Figura 3.8.: Malha do complexo pé-tornozelo (Cheung e Zhang,2006).
Budhabhatti et al. (2007) realizou uma análise de convergência e concluiu que foram precisos mais de 10000 elementos hexaédricos de 8 nós para minimizar o efeito da densidade da malha de elementos nitos no cálculo do pico da pressão plantar para o ato de empurrar do pé. Para Chokhandre et al. (2012), eFontanella et al. (2012), foram necessários respectivamente 30576 e 400000 elementos hexaédricos para representar o seu modelo 3D do calcanhar.
3.5. Contactos e de nições geométricas
Para melhor representação do comportamento do complexo pé-tornozelo, é necessário de- nir contactos entre os seus constituintes de forma a garantir estabilidade e abilidade na simu-lação realizada. O contacto entre os ossos e cartilagens foi de nido na maior parte dos estudos como sem atrito (Cheung e Zhang,2005;Cheung et al.,2006), devido às propriedades naturais de lubri cação presentes nas cartilagens. Recorrendo à literatura, os contactos entre os tecidos moles e os ossos foram de nidos como ligados, uma vez que os ossos devem estar em conformi-dade com os tecidos moles e não deve haver separação (Cheung e Zhang, 2006; Cheung et al., 2005). Durante o ato de compressão do pé, alguns ossos estarão em contacto com os adjacentes, por isso são de nidos contactos sem atrito entre os ossos (Cheung et al., 2006). Alguns auto-res referem que o contacto entre os tecidos moles e o suporte é de nido por um coe ciente de atrito de 0.6 (Zhang e Mak, 1999), assim como o contacto entre os tecidos moles e a palmilha (Cheung e Zhang, 2005). Estudos anteriores representam o tendão de Aquiles com o uso de conectores axiais (Figura 3.10) (Antunes et al., 2008; Cheung e Zhang, 2006), enquanto outros (Cheung et al.,2005;Hsu et al.,2008) representam os efeitos do tendão de Aquiles diretamente na geometria do calcanhar (Figura3.9).