1
Forças e Leis de Newton
Forças e Leis de Newton
Força, a grosso modo, é a grandeza física que causa um puxão ou um empurrão em um corpo. A força é reponsável sempre pela movimentação de um corpo em repouso, pelo desvio da trajetória, pela aceleração ou retardo do movimento de um corpo.
Num conceito mais fundamental, todo o universo é mantido por forças que são responsáveis pela coesão da matéria, pelo movimento dos corpos e pelas mudanças de estado da matéria. A dinâmica dos movimentos e das interações entre corpos no universo ocorrem sempre através de forças. Diríamos que vivemos em um universo mutável graças à existência de forças. As forças fundamentais da natureza são:
Atração gravitacional: Força de atração entre corpos com massa. (Graças a esta força podemos viver na superfície da Terra sem escapar para o espaço sideral.)
Eletromagnética: Força de atração ou repulsão entre cargas elétricas. (Responsável pelas ligações químicas e a existência de moléculas,etc..)
Fraca: reponsável por alguns processos nucleares (decaimento radiativo). Forte: responsável pela formação dos núcleos atômicos.
Toda a estrutura, os fenômenos e a existência de objetos no universo dependem dessas quatro forças fundamentais. Sem essas forças não existiria a matéria como a vemos no nosso dia-a-dia.
A força, por ser um “puxão”ou “empurrão” possui intensidade, direção e sentido. Por exemplo, podemos empurrar um objeto para afatá-lo de nós ou podemos puxar o mesmo objeto para trazê-lo mais próximo de nós. Portanto a força é uma grandeza vetorial por possuir as três caracterísitcas de intensidade, direção e sentido.
Quando um objeto permanece em repouso, isto significa que ele não está sendo puxado nem empurrado. Então podemos concluir que não há forças atuando sobre ele, ou então que todas as forças que atuam sobre ele se anulam.
Por exemplo, na Figura 1, se o casal puxar ambos com a mesma intensidade a cadeira, em direções opostas, a cadeira permanecerá parada no mesmo ponto.
Ou seja, para manter a cadeira em repouso é necessário que: + = 0
2
Figura 1
A soma vetorial das forças é chamada de força resultante ou resultante das forças:
=
A condição em que um objeto permanece em repouso é chamada de condição de equilíbrio estático. Para que o equilíbrio estático ocorra é necessário que a força resultante seja zero:
= = 0
A unidade de força no Sistema Internacional (SI) é Newton, cujo símbolo é N.
Leis de Newton
Sir Isaac Newton observou que havia uma relação fundamental entre forças e a presença ou ausência de movimento.
A Primeira Lei estabelece que:
3 Em outras palavras, esta lei prevê que se um corpo permanece em repouso (velocidade zero) ou com velocidade constante, não há forças atuando ou a resultante é zero, como observado anteriormente.
Na condição onde a velocidade é constante, dizemos que o corpo permanece em equilíbrio dinâmico.
Em ambos os casos, no equilíbrio estático ou dinâmico a força resultante é zero. A segunda Lei estabelece que:
Se existir uma forças atuando sobre um objeto haverá variação da velocidade e a resultante das forças é igual a taxa de variação da velocidade (aceleração) multiplicada pela massa do objeto:
=
A terceira Lei estabelece que:
Quando dois corpos interagem, a força provocada por um dos corpos sobre o outro é sempre igual em módulo, possui a mesma direção e sentido contrário à força que o outro corpo exerce sobre ele.
Tipos de Força:
Estudaremos quatro tipos de forças fundamentais para a mecânica: Força Peso (atração gravitacional), Força Normal, Força de Atrito e Força Elástica. Estas forças são aparentemente diferentes das forças fundamentais da natureza mencionadas anteriormente, mas todas elas podem ser reduzidas nessas forças se olharmos no nível microscópico.
Força Peso
Observamos que nosso corpo tende sempre a ficar grudado no chão. Quando um objeto é largado a uma certa altura, ele é imediatamente puxado em direção ao chão. Esta força é a força de atração gravitacional que a Terra exerce sobre os corpos na superfície dela.
4
Figura 2
Por exemplo. A Figura 2 mostra um objeto largado de uma altura H do chão. Imediatamente, o objeto é puxado para baixo pela força peso . O módulo da força peso é:
=
Onde m é a massa do objeto (em Kg no SI) e g é a aceleração da gravidade. O valor da aceleração da gravidade é aproximadamente constante e é ≅ 9,78 m/s2 (no SI).
Note que a massa, grandeza medida em balanças, não é o peso. A massa é uma grandeza escalar enquanto que a força peso é uma grandeza vetorial.
Força Normal
A Terceira Lei de Newton estabelece que quando um corpo exerce força sobre um outro corpo, o primeiro recebe de volta uma força de intensidade e direção iguais porém no sentido oposto. Esta é a lei também é conhecida como a lei da ação e reação.
A conseqüência mais imediata desta lei é a existência da Força de Reação Normal que ocorre quando há contato entre dois corpos e eles se empurram mutuamente. Por exemplo, veja a Figura 3, um objeto esférico (bola) sobre uma mesa. A bola tem um peso em que, na ausência da mesa, seria puxado para baixo. Por causa do peso da bola, a bola empurra a mesa para baixo com uma força ′. Como a bola empurra a mesa, a mesa reage e empurra o objeto para cima com força de mesma intensidade e sentido oposto. Essa força é a Força Normal que surge como reação da mesa sobre a bola contra a compressão que a bola exerce sobre a mesa.
5 Neste caso, a força normal “compensa” a força peso, mantendo o objeto imóvel, em repouso.
Então, sobre o objeto esférico a força resultante: = +
É igual a zero, porque e tem o mesmo módulo e direção mas sentidos opostos.
Figura 3
Note que a força normal da mesa não é a reação contra a força peso da bola, mas sim a reação contra a compressão que a bola exerce sobre a mesa. A reação à força peso é a força ′ que é exercida no centro da Terra. A Terra puxa a bola e a bola reage puxando a Terra em direção a ela.
6
Força de Atrito
Freqüentemente quando arrastamos um caixote no chão (Figura 4), observamos que é necessária uma quantidade de força para conseguirmos movimentá-lo. Se a força aplicada for pequena, o caixote permanecerá imóvel.
Pelas Leis de Newton, isto significa que existe alguma força que compensa nosso esforço em arrastar o caixote. Ao conseguirmos arrastar o caixote notamos que precisamos manter o esforço para manter o movimento do caixote. Se largarmos o caixote ou dermos um empurrão, o caixote irá desacelerar até parar. Isto significa que existe uma força que atua contra o movimento do caixote. Esta força provém da interação entre o piso e o caixote e é conhecido como a Força de Atrito. A Força de Atrito é sentida por nós como uma força de fricção quando duas superfícies deslizam em contato entre si.
Figura 4
A Força de Atrito tem a propriedade de aumentar a intensidade de acordo com a força aplicada. Por este motivo não conseguimos arrastar um caixote se aplicarmos uma força menor do que uma certa quantidade. A Figura 5 mostra a situação descrita. Quando aplicamos uma força pequena, a força de atrito surge na sentido oposto à força aplicada e a força resultante, que é dada pela soma de todas as forças sobre o caixote é zero, mantedo o caixote em repouso (Figuras 5 (A) e (B)). No entanto a força de atrito tem um valor limite e se aplicarmos uma força maior do que o valor limite, o caixote irá iniciar o movimento porque surgirá uma resultante ( Figura 5 (C)). E o caixote se moverá na direção dessa resultante.
7 Após superada a força de atrito estático, e o caixote por a se mover, ele continuará sob influência da força de atrito porém o valor dessa força será aproximadamente constante e de valor menor do que o valor do atrito estático. Essa força de atrito constante é chamada de
Força de Atrito Cinética.
Figura 5
Como a força de atrito depende do contato entre duas superfícies, o valor da força de atrito é proporcional à Força Normal.
+ = 0
= + = 0
+ = 0
= + = 0
+ = 0
= + ≠ 0
(A)
(B)
8 = !
onde a constante de proporcionalidade ! é chamado de coeficiente de atrito. A diferença entre o Atrito Estático e o Atrito cinético é no valor do coeficiente de atrito.
!" > !$
Força Elástica
A força elástica é a força que surge como força restauradora de uma deformação. Se um corpo elástico for tracionado ou comprimido causando uma deformação, este corpo tenderá a voltar a sua forma original, exercendo uma força contrária ao sentido da deformação. Um objeto típico com esta característica é a mola, mas os objetos materiais em geral possuem características elásticas dentro de certos limites de deformação.
Figura 6
9
%&= −) *
onde * é o vetor da deformação da mola. Note que a força elástica é um vetor com a mesma direção e sentido oposto à deformação (sinal negativo à *). A expressão acima é chamada Lei de Hooke.
Torque e equílíbrio de sólidos
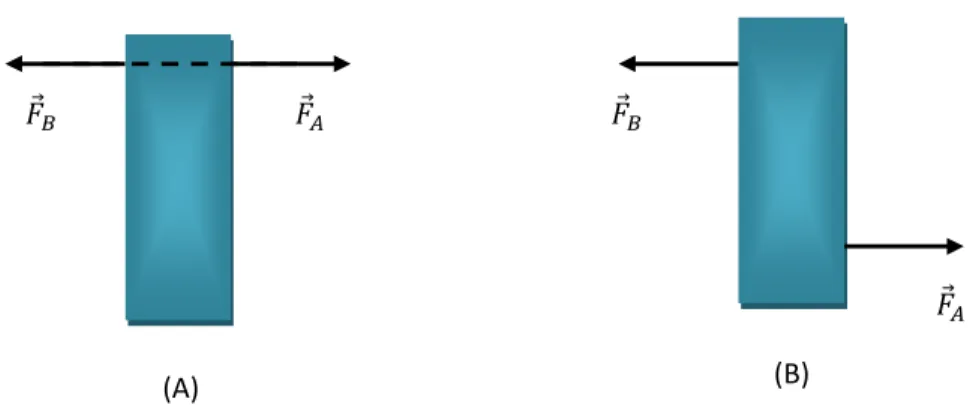
Na Figura 7, dois objetos retangulares estão sob a ação de somente duas forças + e
, de mesmo módulo direção e sentido opostos. (Tente repetir a figura com uma régua sobre
a mesa). Na Figura 7 (A), essas forças atuam na mesma linha. Então, como possuem o mesmo módulo, elas se anulam entre si e o objeto permanece em repouso. Na Figura 7 (B), as forças atuam em linhas diferentes, e apesar da resultante das forças ser nula, o objeto irá girar em torno do ponto central entre as duas forças (Figura 8). Ou seja, o objeto não irá permanecer em equilíbrio estático.
Figura 7: As duas forças + e , possuem o mesmo módulo. (A)
+ ,
(B)
10
Figura 8
Para objetos extensos, a aplicação de forças pode fazer com que um objeto rotacione (gire), mesmo que a força resultante seja zero. Isto se deve ao surgimento do Torque ou
Momento da Força. O Torque é o equivalente da força na rotação. É uma grandeza vetorial que faz com que a velocidade angular de um objeto mude. No caso da Figura 8, o objeto que estava em repouso, com velocidade angular ou velocidade de rotação zero, ao se aplicar duas forças em pontos diferentes o objeto passa a girar, assumindo uma velocidade angular. O torque é dado como produto vetorial entre a força e o vetor do ponto de aplicação da força em relação ao eixo de rotação:
- = ×
Figura 9
+ ,
11 A Figura 9 mostra o exemplo do uso do torque. A força aplicada na extremidade da haste da alavanca faz com que a haste rotacione em torno do ponto de apoio. O ponto de apoio é o eixo de rotação da haste. A rotação da haste fará com que a outra extremidade mova o objeto, que sente uma força 0.
O diagrama de forças da Figura 9 é dada pela Figura 10:
Figura 10
O torque da Força é dado:
- = sin 4
Onde a direção e sentido é entrando na folha, indicado pela figura. O termo:
5= sin 4
é conhecido como o braço de alavanca e o módulo do torque é dado pela multiplicação entre o módulo da força e o braço de alavanca:
- = 5
e a direção e sentido do torque são determinadas pela regra da mão direita.
Note que o braço de alavanca é dado pelo comprimento da reta perpendicular a direção da força e o eixo de rotação.
A unidade do Torque no Sistema Internacional é Newton-metro: N.m
Portanto, em corpos extensos a condição de equilíbrio requer mais do que a resultante das forças ser nula. Em corpos extensos, assim como a força resultante, o torque resultante também deve ser nulo para que haja condição de equilíbrio estático ou dinâmico.
A Figura 11 exemplifica a condição de equilíbrio de corpo extenso. Duas bolas equilibram uma haste de massa desprezível na posição horizontal. A bola 1 exerce uma força
sin 4
12 = 2 N para baixo em uma das extremidades da haste e a bola 2 exerce uma força 0= 3 N para baixo na extremidade oposta. A haste está sobe uma faca. Pelo peso das bolas, a haste comprime a faca e a faca reage aplicando uma força normal para cima no ponto de contato entre a faca e a haste. Esta força compensa as forças e 0.
O braço de alavanca entre a força e a ponto de apoio é de = 2 m e o braço de alavanca entre a força 0 e a ponto de apoio é de 0 = 3 m. Portanto os módulos dos torques, ou momentos das forças e 0 são - = 6 N.m e -0 = 6 N.m, respectivamente, de mesma direção e sentidos opostos, de acordo com a descrição da Figura 11 (regra da mão direita).
Figura 11
Como o sistema está em equilíbrio estático, a soma vetorial de todas as forças é zero assim como a soma vetorial de todos os torques é zero:
= + 0+ = 0
e
- = - + -0= 0 0
0
13 Portanto para que um corpo permaneça em equilíbrio estático ou dinâmico deve ter as resultantes das forças e dos torques iguais a zero ou, em outras palavras, satisfazer as seguintes condições:
9 : ; :
< = = 0
- = - = 0