Analysis of Motoring and Generating Operation Through Vector Control Induction Machine Drive
Texto
Imagem

Documentos relacionados
The drag force variation caused by the variation of the speed, waves, the wind etc., further lead to a change in the propeller's speed and, consequently, the drive power[3].Figure
[r]
The control design has to minimize the effects of wind fluctuation and ripple torque over the energy delivered to.. electric load, generating the third control objective output z 3
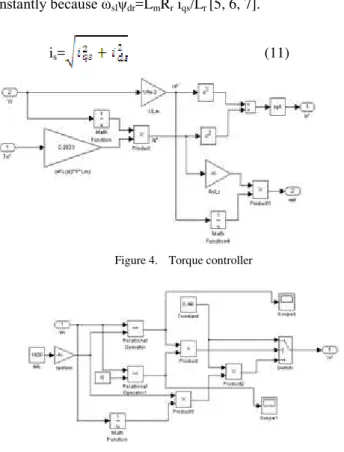
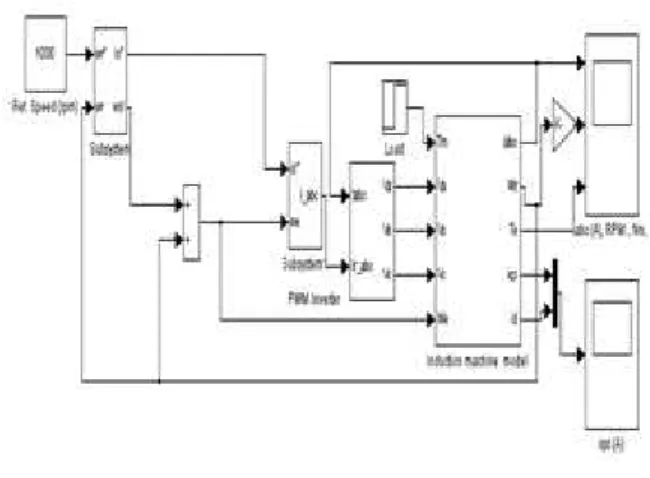
The main objectives of this thesis are to perform a study of the direct torque control with and without space vector modulation of an induction machine, using
The control design has to minimize the effects of wind fluctuation and ripple torque over the energy delivered to.. electric load, generating the third control objective output z 3
11 and 12 show the responses of the common coupling bus-bar rectified load output voltage sensor, and the control voltage due to positive and negative step change in
In an automotive vehicle, engine produces the power which is transferred to the drive shaft. Chain drive is one of the commonly used drive train to transfer
This paper presents Direct Torque Control (DTC) using Space Vector Modulation (SVM) for an induction motor drive fed from a photovoltaic multilevel inverter (PV-MLI).. The
