CREEP ANALYSIS OF STEEL-CONCRETE COMPOSITE BEAMS USING GENERALIZED BEAM THEORY
Texto
Imagem
Documentos relacionados
In Figure 2 the two areas labeled Nabarro-Herring creep 16,17 and Coble creep 18 are based on the theoretical relationships developed for diffusional creep, the area labeled
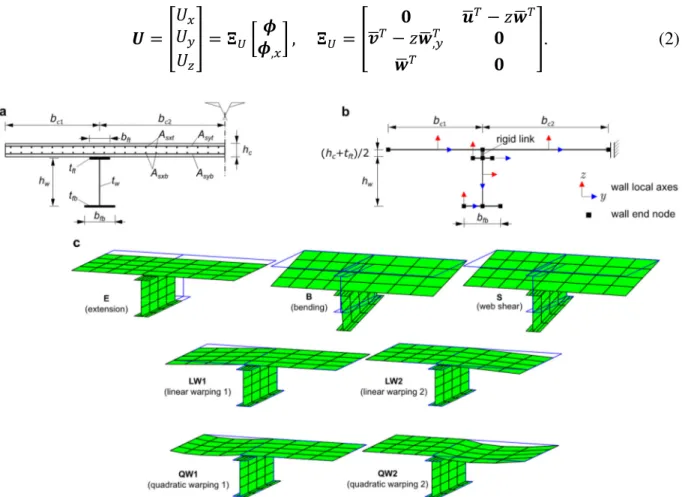
The purpose of this work is to present a three-dimensional beam element for the structural and thermal analysis of reinforced concrete, steel and composite steel and
Posteriormente, no Capítulo IV, é abordado o que constitui o objeto central do trabalho, infere-se da importância do SGI recorrendo, para o efeito, à análise de
first obtained the creep deformation in a large-span reinforced concrete beam, then steel beam-column connections, and lastly the deformations in a pedestrian bridge using
Dynamic mechanical analysis and creep - by using Findley and Burger's methods - tests were performed aiming to evaluate the viscoelastic properties of the composites, in
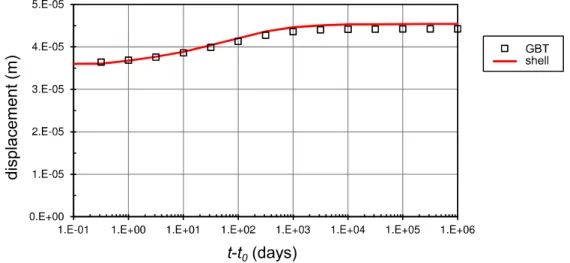
(2006) studied through a FE formulation the behavior of steel-concrete composite beams under long- term loads, including simultaneously the effect of concrete creep, shrinkage
A computationally efficient GBT-based beam finite element for calculating buckling (bifurcation) loads of steel-concrete composite beams was proposed, which accounts for shear
4.3.5 Composite model for the characterization of the long-term properties 137 4.3.6 Prediction of dam concrete creep strains under compression based on experimental tests
